Вариант № 7
реклама

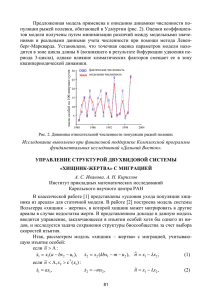
Вариант № 7 ax 2 gx bxy x Nx y cy dxy Задание: 1. Ввести новые переменные, максимально уменьшив число параметров системы. 2. Найти неподвижные точки системы и исследовать их характеристики в зависимости от параметров системы. 3. Исследовать поведение предельных циклов. Доказать их существование/несуществование. 4. Построить фазовые портреты системы при всех возможных параметрах системы. 5. Дать биологическую интерпретацию полученным результатам. 1. Вводим новые переменные x Ax, y By, t Tt и переписываем систему: A aA2 x 2 x gAx bAxBy T N Ax B y cBy dAxBy T aTAx 2 gTx bTBxy x N Ax y cTy dATxy 1 g c Пусть bTB=1, gT=1, dAT=cT T= , B= , A= g b d aTAx 2 x x xy A N (1 x) N y cTy cTxy aTA A , , cT N N x 1 y x x 1 x y y (1 x) 2. Нахождение неподвижных точек преобразованной системы 2.1 2.2 2.3 x=0,y=0 ==> O(0,0) x y 0, x 1 0 1 x 1 x , > 1 P , 0 x 1 y 0 1 x 1 x 0 x 1, y 1 1 , 1 Q 1, 1 1 3. Характеристики неподвижных точек Запишем Якобиан нашей системы x x 2 x y 2 x 1 y x 1 x A (1 x) 2 y y y x y 3.1 3.2 (1 x) x 1 0 AO 1 1, 2 0 Поскольку действительные части собственных значений отрицательны, тогда по теореме Ляпунова точка О есть сток. 1 1 AP 1 , 2 (1 ) 1 (1 ) 0 Здесь требуется исследование по параметрам 3.3 1 (1 ) 2 AQ (1 1) 0 Tr ( AQ ) 0 Q неустойчива. (1 ) 2 Проведем дополнительное исследование, обозначив на параметрическом портрете возможные области значений и ( - фиксировано ) . а) точка О – сток, как было показано выше; 1 б) точка Р , 0 : 1 1 1 , 2 (1 ) Область 1: -- точка Р не существует Область 2: , 1 1 0 отсюда 1 0, 2 0 Точка Р – исток (неуст. узел) Область 3: , 1 1 0 отсюда 1 0, 2 0 Точка Р – седло в) точка Q 1, 1 : 1 1 Область 1: 1, 1 точка Q не существует. Область 2: , 1 1 0 точка Q - не существует Область 3: 1 Tr ( AQ ) 0 (1 ) 2 1 det( AQ ) 0 1 Точка Q – исток ( неустойчивый узел) Кроме того, при поиске собственных значений Якобиана возникает уравнение 2 Tr ( AQ ) det( AQ ) 0 D Tr ( AQ ) 2 4 det( AQ ) Решение уравнения D<0 производилось графически , поскольку аналитическое решение в этом случае представляется затруднительным. Для этого использовался математический пакет Maple 6. При фиксированном значении были рассмотрены точки ( , )области 3, для которых проверялось неравенство D<0. Таким образом, как видно из рисунка, в 3-ей области появляется подобласть 3’. Неравенство D<0 выполняется в области 3 – 3’ , где вещественные части собственных значений будут положительны. В этой области точка Q превращается в неустойчивый фокус. Запишем результаты исследования характеристик точек в таблицу: \Область Точка O P Q 1 2 3 3 – 3’ сток не сущ. не сущ. сток исток не сущ. сток седло исток сток седло неуст. фокус 4.1 Параметрические области системы 4.2 Область 1: 0.6, 2, 5 4.3 Область 2: 0.6, 1.2, 0.5 4.3 Область 3’ : 0.6, 1.2, 0.01 4.5 Область 3 – 3’ : 0.6, 4, 1 5. Биологическая интерпретация модели. x 1 y x x 1 x y y (1 x) Данная система представляет собой модель взаимного влияния в природе двух животных видов – хищников и жертв. Как видно из рисунков, в этой системе оба вида вымирают. Предельных циклов в системе нет. X – жертвы, Y – хищники. Динамику взаимодействия двух видов описывают три функции: g(x) – функция динамики численности жертв, p(x) – трофическая функция жертв (характеризует число жертв убитых одним хищником), q(x) – трофическая функция хищников (характеризует влияние числа жертв, убиваемых одним хищником, на изменение численности популяции хищников). g ( x) lim g ( x) x 1 lim g ( x) 1 x 0 x 1 , 1 x p( x) x , q( x) x lim p ( x ) lim q( x) lim p ( x ) 0 lim q ( x ) 0 x x 0 x x 0