Численное моделирование динамического взаимодействия
реклама

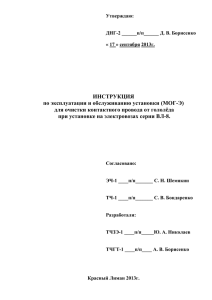
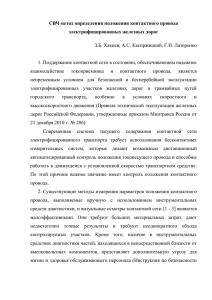
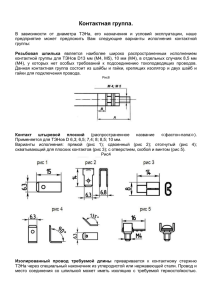
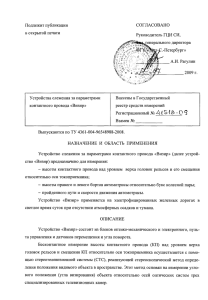
УДК 519.61 ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ ДИНАМИЧЕСКОГО ВЗАИМОДЕЙСТВИЯ ТОКОПРИЕМНИКА ЭЛЕКТРОВОЗА И КОНТАКТНОЙ ПОДВЕСКИ Д. А. Кувшинов Петрозаводский государственный университет, Петрозаводск, Россия Современное состояние и развитие методов моделирования механических систем рассматриваемого класса с контактным взаимодействием элементов отражено в [1, 2]. При разработке таких моделей появляется ряд проблем. Наибольшие затруднения обусловлены необходимостью учета возможности появления зазоров между токоприемником и контактным проводом при некоторой скорости движения электропоезда. Имеет место конструктивная нелинейность, так как структура механической системы в данный момент времени зависит от того, закрыт или открыт зазор. Решение задачи может быть найдено с использованием методов нелинейной механики [3]. В работах [4, 5] предложена методика расчета изменения силы контактного взаимодействия полоза токоприемника и токоведущего провода контактной сети. В этой методике сила контактного взаимодействия заранее неизвестна и подлежит определению как один из результатов решения задачи. Особенность алгоритма заключается в том, что стандартные зависимости метода конечных элементов дополнены соотношениями для сил контактного взаимодействия и величин зазоров, причем аналоги дифференциальных уравнений движения записаны с использованием односторонних конечных разностей, а расчет на каждом шаге по времени сведен к линейной задаче дополнительности [6]. В качестве иллюстрации применения предложенной методики рассмотрим результаты решения модельных задач. Моделирование распространения продольных и поперечных волн в токоведущем проводе контактной подвески. По аналогии с известным подходом к решению волновых задач [7] были определены скорости распространения продольных и поперечных волн в контактной подвеске при различных значениях сил натяжения контактного провода и несущего троса. Было принято: модуль упругости Е = 1,1·1011 Н/м2, плотность ρ = 8960 кг/м3, силы натяжения несущего троса Т = 14,7 кН и контактного провода К = 9,8 кН. Как видно из рис. 1 и 2, время распространения поперечной волны в контактном проводе на участке длинной 5 м составляет 0,028 с, продольной волны 0,0014 с. Соответственно получаем: скорость продольной волны 3570 м/с, поперечной – 179 м/с. При четырехкратном увеличении сил натяжения Т и К было установлено, что скорость продольной вольны изменяется незначительно (3590 м/с), скорость поперечной волны возрастает до 250 м/с. Чтобы сравнить полученные результаты с известными данными, воспользуемся формулой для скорости распространения продольной волны в материале v1 E / . Полученное по этой формуле значение v1 = 3500 м/с мало отличается от найденного по предлагаемой методике. Рис. 1. Распространение поперечной волны в токоведущем проводе на участке длиной 5 м при Т = 14,7 кН, К = 9,8 кН Рис. 2. Распространение продольной волны при Т = 14,7 кН, К = 9,8 кН Для скорости распространения поперечной волны известна формула [1] T K , (1) mТ mК где mТ, mK – масса единицы длины соответственно несущего троса и контактного провода. По формуле (1) при T = 14,7 кН и К = 9,8 кН получаем v2 = 129 м/с. Четырехкратное увеличение сил натяжения T и К теоретически приводит к возрастанию скорости v2 в два раза. Численное моделирование по предлагаемой методике дает увеличение скорости в 1,39 раза. Объясняя расхождение полученных результатов скорости распространения поперечных волн, обратимся к [7], где отмечено, что аналитически вычисленные скорости распространения волн не являются абсолютно точными, так как провод имеет искривление, все перемещения конечны, продольные и поперечные волны взаимодействуют между собой. Все эти факторы не учитываются в аналитическом решении. В численном решении эти особенности полностью отражены. Моделирование контактного взаимодействия токоприемника электровоза и контактной подвески. За основу модели взята плоская схема замещения пространственной ромбовидной автокомпенсированной контактной сети (ПРАКС) [8]. Исследовалось изменение силы контактного взаимодействия токоведущего провода и полоза токоприемника Fк в зависимости от скорости движения электровоза, величины начального нажатия токоприемника F0 и силы натяжения контактного провода. Некоторые результаты вычислений по предлагаемой методике приведены на рис. 3 и 4. v2 Рис. 3. Интервал изменения Fк в зависимости от скорости движения электровоза V. Рис. 4. Интервал изменения Fк в зависимости от силы натяжения K при V=180 км/ч. Заключение. Представленная в данной статье методика численного моделирования позволяет прогнозировать состояние системы «контактная сеть – токоприемник» при различных значениях скорости движения электровоза, начальной силы контактного взаимодействия, расстояний между опорами и струнами, жесткости струн, массы и жесткости токоприемника, силы натяжения токоведущего провода и других характеристик системы. Тем самым, в дополнение к возможностям известных методик [1, 2, 8–11], расширяется набор инструментов для исследования систем «контактная сеть – токоприемник», что может быть использовано при совершенствовании и оптимизации этих систем. Работа выполнена при поддержке Российского фонда фундаментальных исследований проект № 08-08-00979. ЛИТЕРАТУРА 1. Вологин В.А. Взаимодействие токоприемников и контактной сети. М.: Интекст, 2006. – 256 с. 2. Ефимов А.В., Галкин А.Г. Развитие теории проектирования контактной сети на основе учета продолжительности ее жизненного цикла // Транспорт Урала: науч.-техн. журнал. Екатеринбург: УрГУПС, 2004. – № 1. – С. 53 – 59. 3.Рудых О.Л., Соколов Г.П., Пахомов В.Л. Введение в нелинейную строительную механику. М.: АСВ, 1999. – 103 с. 4. Колесников Г.Н., Кувшинов Д.А. Численное моделирование полукоэрцитивного механического взаимодействия токоприемника и контактной сети при высокой скорости электровоза // Ученые записки Петрозаводского государственного университета: Серия «Естественные и технические науки». Петрозаводск: Изд-во ПетрГУ, 2008. – № 3. – С. 83-89. 5. Кувшинов Д.А. Численное моделирование контактной сети и токоприемника электровоза как механической системы с полукоэрцитивным взаимодействием элементов // Системы управления и информационные технологии. – № 2.3(32). – Воронеж: Изд-во «Научная книга», 2008. – С. 360–364. 6. Колесников Г. Н., Раковская М. И. Энергетический критерий очередности перехода односторонних связей в действительное состояние // Обозрение прикл. и промышл. матем. – 2006. – Т. 13. – Вып. 4. – С. 652–653. 7. Зылев В.Б. Вычислительные методы в нелинейной механике конструкций. – М.: Науч.-изд. центр "Инженер", 1999. – 145 с. 8. Ерошенко С.В., Демченко, Туркин В.В. Метод прямого математического моделирования динамики контактных подвесок // Наука и транспорт. Спец вып. журнала «Транспорт Российской федерации». СПб: Российская академия транспорта, 2007. – С. 32–33. 9. Комарова О.А. Особенности взаимодействия токоприемника с контактной подвеской при высоких скоростях движения электропоездов: Дис. ... канд. техн. наук: Санкт-Петербург, 2004. – 147 c. http://diss.rsl.ru 10. Туркин В.В. Исследование взаимодействия пространственных автокомпенсированных контактных подвесок с токоприемниками: Дис. ... канд. техн. наук: М.: РГБ, 2005. – 160 с. http://diss.rsl.ru 11. Шумейко Г.С. Методики расчета предварительно напряжённых систем двойных контактных подвесок на действие статических и ветровых нагрузок: Дис. ... канд. техн. наук: М.: 2003. – 248 c. http://diss.rsl.ru