Автореферат Данг Н.А
реклама

На правах рукописи
Данг Нгок Ань
РАЗРАБОТКА МЕТОДА РАСЧЁТА ПАРАМЕТРОВ
ГЕОМЕТРИЧЕСКОЙ СТАБИЛЬНОСТИ КОРПУСОВ АНТЕННЫХ
РЕФЛЕКТОРОВ
Специальность 01.02.06 – Динамика, прочность машин и аппаратуры
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Москва – 2008
Работа выполнена в Московском государственном техническом университете
им. Н.Э. Баумана
Научный руководитель:
доктор технических наук, профессор
Попов Борис Глебович
Официальные оппоненты:
доктор технических наук, профессор
Сарбаев Борис Сафиулович
кандидат технических наук
Никитенко Вячеслав Иванович
Ведущая организация
РКК «Энергия»
Защита состоится « 16 » октября 2008 г. в 14 ч. 30 мин.
на заседании
диссертационного совета Д 212.141.03 при МГТУ им. Н.Э. Баумана по
адресу: 107005, г. Москва, 2-ая Бауманская ул., д.5.
С
диссертацией
можно
ознакомиться
в
библиотеке
Московского
государственного технического университета им. Н.Э. Баумана.
Автореферат разослан «16» сентября 2008 г.
Ученый секретарь
диссертационного совета
Карпачев А. Ю.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. В связи с потребностью использования
телекоммуникационных
спутниковых
систем
возрос
интерес
к
параболическим рефлекторным антеннам, работающим в условиях
открытого космоса.. К таким конструкциям предъявляют ряд жестких
требований по:
- геометрической точности;
- гладкости поверхности;
- размеростабильности при нагреве;
- высокому качеству отражающей поверхности
- устойчивости к ультрафиолетовому излучению, к атомарному
кислороду и другим факторам космического пространства.
Эти требования, за исключением размеростабильности при нагреве,
первоначало удовлетворялись изготовлением металлических зеркал,
штампованных из стальных или литых алюминиевых материалов. Однако в
последнее время для этих конструкций все чаще стали применять
композиционные материалы, имеющие малые коэффициенты линейного
температурного расширения.
Обеспечение геометрической точности параболических рефлекторов на
этапе изготовления является одной из важных технологических задач.
Выходные геометрические параметры композитных рефлекторов зависят от
технологии изготовления. Для обеспечения высокого качества поверхности и
точности геометрии рефлекторов нужно иметь высокоточные оправкиформоносители с высококачественной поверхностью. Изготовление оправок
представляет собой довольно сложный и дорогостоящий процесс. Поэтому
необходимо разработать метод расчёта, позволяющий на этапе
проектирования рассчитать геометрию оснастки, обеспечивающую заданную
геометрическую точность рефлектора.
Одной из актуальных задач считается задача определения размерных
отклонений изделия после снятия с оправки. Здесь необходимо учитывать
начальные и температурные деформации композитных обшивок
трёхслойного рефлектора.
Целью диссертационной работы является обоснование выбора
рациональных, с точки зрения геометрической стабильности, конструктивнотехнологических параметров трёхслойных композиционных корпусов
антенных рефлекторов параболического типа для обеспечения современной
телекоммуникационной спутниковой связи. Разработка метода расчёта
возможных отклонений профиля корпуса при конкретной технологии
изготовления.
Для достижения этой цели были поставлены и решены следующие
задачи:
1
1. Разработать метод расчёта корпуса рефлектора с учетом начальных и
температурных
деформаций
для
общего
случая
анизотропии
композиционных несущих слоёв трёхслойной конструкции.
2. Разработать алгоритм и программу расчёта, позволяющие дать
заключение о соответствии конструкции по заданным геометрическим
параметрам.
3. Выполнить параметрический анализ влияния конструктивных и
технологических параметров на геометрию профиля рефлектора.
Научная новизна. Разработан новый метод расчёта трёхслойных
конструкций, позволяющий рассчитывать размерные отклонения формы
рефлектора в геометрической нелинейной постановке. Кроме того,
исследована зависимость отклонений формы от геометрических параметров
рефлектора и от свойств анизотропии несущих слоёв. Для общего случая
анизотропии, т. е. при несимметричной структуре стенки многослойной
оболочки
относительно
меридиана,
учитывается
возможный
осесимметричный сдвиг и крутка оболочки.
Методы и походы решения поставленных задач. В качестве основного
метода решения применён метод конечных элементов (МКЭ), а для решения
нелинейной задачи использованы процедуры метода Ньютона. На основе
обоих методов построены современные процедуры статического расчёта.
Также
разработан специализированный программный комплекс,
реализующий метод конечных элементов. Данные расчётные программы
позволили решить задачи в геометрически линейной и нелинейной
постановках.
Практическая ценность работы. Разработанный новый метод расчёта
позволяет выбрать структуры несущих композитных слоёв, обеспечивающие
наименьшие отклонения от требуемой геометрической формы рефлектора.
Результаты диссертационной работы использованы и внедрены на
предприятии РКК «Энергия».
Апробация работы. Основные положения диссертации и полученные
результаты докладывались на Международной научно-практической
конференции «Участие молодых учёных, инженеров и педагогов в
разработке и реализации инновационных технологий» (Москва, 20-24 ноября
2006), III Международной конференции «Ракетно- космическая техника:
фундаментальные и прикладные проблемы» (г. Москва, 19 - 23 ноября 2007
г.), научном семинаре кафедры «Прикладная механика» МГТУ им Н.Э.
Баумана (2008).
Публикации. По результатам исследований опубликованы 2 печатные
работы и тезисы, список публикаций приведен в конце автореферата.
Структура и объем работы. Диссертация состоит из введения, 4 глав,
общих выводов по работе, списка использованных литературных источников
и приложения.
2
Представленная работа содержит 136 страниц машинописного текста,
включая 89 рисунков, 2 таблица и 95 наименований использованных
литературных источников.
ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ
Во введении дано обоснование темы диссертационной работы,
проанализировано современное состояние проблемы исследования, приведен
обзор литературы по данному вопросу, даются краткие сведения о
содержании диссертационной работы.
В первой главе приведены основные соотношения для расчета
многослойных композитных оболочек вращения.
Для математического описания деформированного состояния применён
подход Лагранжа (материальный), когда в качестве независимых переменных
использованы материальные координаты частицы тела. Учет геометрической
нелинейности в квадратичном приближении выполнен на основе гипотез
Кирхгофа-Лява. Деформированное состояние описано компонентами тензора
деформаций Грина-Лагранжа.
Рассмотрена оболочка вращения, представляющая собой поверхность,
полученную вращением образующей вокруг вертикальной оси (рис. 1).
Pиc.1. Схема оболочки вращения
Рис. 2. Кинематическая схема
перемещений точек срединной
поверхности оболочки
В качестве перемещений в локальной системе координат (ЛСК)
принимают меридианальные перемещения u, окружные v и нормальные
перемещения w (рис. 1, 2). В качестве перемещений в глобальной системе
координат (ГСК) принимают радиальные перемещения ur, осевые
перемещения uz и окружные v. Перемещения u, w связаны с ur, uz следующим
образом:
3
u ur cos uz sin ,
ur u cos w sin ,
или
(1)
w ur sin u z cos ,
uz u sin w cos .
Деформационные
соотношения,
связывающие
обобщённые
деформации с перемещениями, соответствуют гипотезам Кирхгофа-Лява,
изложенным в работах Бидермана В. Л., Феодосьева В. И., Усюкина В. И..
В случае линейности деформаций деформационные соотношения
выражаются формулами:
ex u ', ey cr u sr w, xy cr v v ',
x w'',
y cr w'- sr2 w- sr cr u,
xy 2sr cr v 2sr v ',
или
є = L 1U,
В случае учета нелинейности эти соотношения имеют вид:
1
ex u ' ( w' ) 2 , ey cr u sr w, xy cr v v ',
2
x w'', y cr w'- sr2 w- sr cr u , xy 2sr cr v 2sr v ',
(2)
или
є = L 2 U,
(3)
cr
cos
sin
, sr
,
r
r
где
Τ
є ex ey xy x x xy вектор-столбец обобщенных деформаций,
L 1, L 2 - матрица, связывающая деформации и изменения кривизны с
перемещениями.
При расчете многослойных конструкций из КМ удобно анализировать
напряженно-деформированное состояние (НДС) отдельного слоя и
вычислять жесткостные характеристики в системе координат, связанной с
осями упругой симметрии слоя. Рассмотрим преобразование компонент
напряженного состояния при смене системы координат. На рис. 3
представлены компоненты плоского напряженного состояния 1 , 2 , 12 в
системе координат слоя и в системе координат конструкции x , y , xy .
y
σx
xy
xy
x
y
Рис. 3. Система координат и напряжения в отдельном слое
4
Согласно закону Гука напряжения связаны с деформациями
соотношениями упругости
σ = Eε ,
(4)
По определению погонные усилия [Н/м]
N x x dz , N y y dz , N xy xy dz ,
(5)
h
h
h
погонные моменты [Н]
M x x zdz , M y y zdz , M xy xy zdz .
h
Nxy
рxyNy
р
h
а)
Nx
z
h
h
Ny
x
y
0
My
Nxy
y
h/2
x
Mxy
Mx
б)
h/2
z
z
Nx
(6)
h
0
y
x
Рис. 5. К Выбору координатной поверхности
z 0 в многослойном пакете:
а) Координатная поверхность совпадает
со срединной поверхностью
б) Координатная поверхность совпадает с
нижней лицевой поверхностью
Рис. 4. К определению
внутренних силовых
факторов
Если в конструкции требуется учитывать температурные и начальные
деформации, то физические соотношения для многослойных пакетов имеют
следующий вид
N x B11 B12 B13
N
y B21 B22 B23
N xy B31 B32 B33
M
x
C11 C12 C13
M y C21 C22 0
M xy C31 C23 C33
или в матричной форме
C11
C12
C21
C22
C31
C23
D11
D12
D21
D22
D31
D32
C13
C23
C33
D13
D23
D33
xo N xT
x
o
N
y
y
yT
o
xy
xy
N xyT
o
M
x
x
xT
o
M
y
y
o
yT
xy
xy M xyT
N D(є + є 0 ) NT D є N 0 NT ,
(7)
где N 0 D є 0 ,
є 0 - вектор-столбец обобщенных деформаций,
5
N 0 , N T - вектор-столбцы начальных и температурных внутренних силовых
факторов.
В этих соотношениях коэффициенты Bij называют коэффициентами
мембранных жесткостей:
n
Bij Eij dz
h
zk
E
k 1 zk 1
k
ij
n
dz Eij zk zk 1 ;
k
(8)
k 1
коэффициенты Cij называют коэффициентами смешанных жесткостей:
1 n k 2
(9)
Cij Eij zdz Eij zk zk21 ;
2
k
1
h
коэффициенты Dij называют коэффициентами изгибных жесткостей:
1 n k
(10)
Dij Eij z 2dz Eij zk3 zk31 ;
3
k
1
h
n - число слоев в многослойном пакете; Eijk - коэффициент матрицы Eij
соотношений упругости для k-го однонаправленного композиционного слоя;
z k 1 , zk - нормальные координаты нижней и верхней поверхностей k-го слоя.
Далее применяется принцип возможных перемещений (ПВП). Для
равновесного состояния конической оболочки при объемных силах g = 0 и
поверхностных силах p 0 формулировка принципа записывается
следующим образом:
l
2 (є T N U Tp) r dx 0,
(11)
0
где l - длина образующей конической оболочки;
є =[ 1 , 2 , 12 , 1 , 2 , 12 ]Т- вектор-столбец обобщенных возможных
деформаций; N =[N1, N2, N12, M1, M2, M12, ]T- вектор-столбец внутренних
силовых факторов; U=[ u, w , v]T – вектор-столбец возможных
перемещений; p=[pu, pw, pv]T- вектор-столбец распределённых поверхностных
касательных и нормальных сил.
Вторая глава посвящена построению конечного элемента (КЭ)
многослойной композитной оболочки вращения. Оболочки вращения
набирали КЭ конических оболочек (рис. 6). Отдельный КЭ конической
оболочки будет определяться нормальными круговыми сечениями 1 и 2 (рис.
7). Для текущего сечения с аргументом x радиус параллели будет равен:
r r0 ( s1 x)cos ,
(12)
где s1 – расстояние вдоль образующей от начальной параллели до параллели
первого сечения КЭ.
6
ro
n
s1
1
x
l
r
Рис. 6. Конечные элементы
конических оболочек
2
2
Рис. 7. Координаты отсчета конечного
элемента
Для равновесного состояния отдельного КЭ запишем формулировку
ПВП:
l
2 (є T N U T p) r dx 2 q T R 0 ,
(13)
0
где: q=[ ur1 , uz1 , v1 , ω1, ur2 , uz2 , v2 , ω1]Т- глобальные узловые
возможные степени свободы; R=[ r1Nr1, r1Nz1, r1N12, r1Mω1, r2Nr2, r2Nz2 , r2N12,
dw
r2Mω2]T- вектор-столбец обобщенных узловых реакций; i i - угол
dx
поворота нормального сечения в плоскости меридиана.
Для приближенного описания свойств КЭ задана аппроксимация полей
перемещений:
u a1 a2 x;
w a3 a4 x a5 x 2 a6 x 3 ;
a7 a8 x.
или
где а =
1
Ф = 0
0
U = Ф a,
(14)
T
[ a1, a2, a3, a4, a5, a6, a7, a8] - коэффициенты аппроксимации.
x 0 0 0 0 0 0
0 1 x x 2 x3 0 0 - матрица функции формы;
0 0 0 0 0 1 x
U = u w v - вектор узловых перемещений
Согласно деформационным соотношениям (2) для аппроксимаций
перемещений (14) получим
є = L1U = L1Ф a = B a ,
(15)
7
T
где
B=L1Ф=
d
0
0
dx
cr
sr
0
0
cr d
1 x 0 0 0 0 0 0
0
dx
0 0 1 x x 2 x3 0 0 =
2
d
0
0
2
dx
0 0 0 0 0 0 1 x
2
s c s c d
0
r
r
dx
r r
0
2 sr cr 2 sr d
0
dx
1
0
0
0
0
0
0
0
c
2
3
cr x
sr
sr x
sr x
sr x
0
0
r
0
0
0
0
0
cr
cr x 1
.
0
0
0
0
2
6
x
0
0
sr cr sr cr x sr2 sr x 2 cr sr2 x 2 2cr x sr2 x 3 3cr x 2
0
0
0
0
0
0
0
2 sr cr 2 sr cr x 2sr
0
Возможные перемещения U будем аппроксимировать аналогичным
образом:
(16)
U = Ф a,
где a – вектор-столбец (8х1) произвольных коэффициентов.
Подстановка (14), (16) в вариационное уравнение (13) с учетом
соотношений упругости (7) дает
l
a
l
T
(B DB B N 0 B NT ) a rdx
T
T
T
0
a
T
ФТp rdx - qTR = 0,
0
или
aT (K a a P0 a PTa Pa ) a aT Paa aT R 0,
(17)
где
l
l
l
l
K a B DB rdx; Po B N 0 rdx; PT B NT rdx; Pa ФТp rdx . (18)
T
0
T
0
T
0
0
Для того, чтобы перейти от коэффициентов аппроксимации а = [ a1, a2,
a3, a4, a5, a6, a7, a8]T к степеням свободы в ГСК q=[ur1 , uz1 , v1 , ω1 , ur2 , uz2 ,
v2, ω2]Т, cначала перейдем к степеням свободы в ЛСК q л = [ u1, w1, v1 , ω1, u2,
w2, v2 ,ω2 ] T .
Дадим определение степеням свободы в ЛСК
u1 u ( x 0) a1; w1 w( x 0) a3 ; v1 v( x 0) a7 ;1 w( x 0) a4 ;
u2 u ( x l ) a1 a2l; w2 w( x l ) a3 a4l a5l 2 a6l 3 ;
v2 v( x l ) a7 a8l;2 w( x l ) a4 a5 2l a6 3l 2 .
8
Эти уравнения рассмотрим как систему уравнений для определения
коэффициентов ai
T a = qл,
(19)
где
1 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0
0 0 0 0 0 0 1 0
0 0 0 1 0 0 0 0
T
.
1 l 0 0 0 0 0 0
2
l 3 0 0
0 0 1 l l
0 0 0 0 0 0 1 l
2
0 0 0 1 2l 3l 0 0
Решив (19), выразим коэффициенты аппроксимации а через q л :
a = T -1q л .
Аналогичным образом определим связь
a = T -1 q л .
Тогда формулировка равновесного состояния для КЭ (17) примет вид
qTл {(T1 )T K a T1q л -(T1 )T P0 a (T1 )T PTa (T1 )T Pл} qT R 0
или
(20)
qTл (K лq л P0 л PTл Pл ) q TR 0 ;
1 T
1
1 T
1 T
1 T
где K л (T ) K aT ; P0 л (T ) P0a ; PTл (T ) PTa ; Pл T ) Pл . (21)
Теперь перейдем к степеням свободы в ГСК. Для этого выразим
степени свободы в ЛСК q л через степени свободы в ГСК q :
q л = А q,
(22)
или
0
0
0 0 ur1
u1 cos sin 0 0
w sin cos 0 0
0
0
0 0 u z1
1
v1 0
0
1 0
0
0
0 0 v1
0
0 1
0
0
0 0 1
1 0
.
u2 0
0
0 0 cos sin 0 0 ur 2
0
0 0 sin cos 0 0 u z 2
w2 0
v 0
0
0 0
0
0
1 0 v2
2
0
0 0
0
0
0 1 2
2 0
Аналогично
q л = А q.
Тогда формулировку равновесного состояния для КЭ (20) запишем
через степени свободы в ГСК:
(23)
qT (Kq P0 PT P R) 0
9
(24)
K STK лS; P0 ST P0 л ; PT ST PTл ; P STPл .
Из уравнений (23) в силу произвольности коэффициентов q следует
искомое уравнение
R K q P ,
(25)
где P P0 PT P - называют вектором приведенных узловых сил,
который учитывает начальные деформации, температурные деформации и
внешние распределенные поверхностные силы; Матрицу К называют
матрицей жесткости КЭ в ГСК; R - узловые реакции в ГСК.
где
Для решения нелинейной задачи статики воспользуемся итерационным
шаговым методом. Будем считать, что для m-го шага все деформации
известны:
( 26)
e ( m ) = ( m ) + ( m ) .
где ( m ) - линейные, а ( m ) - нелинейные составляющие деформаций.
Деформации на ( m 1)-ом шаге требуется определить
e( m1) ( m1) ( m1) e( m) e( m) ,
(27)
где e( m) ( m1) ( m1) (( m) ( m) ) ( m) ( m) .
(28)
Для описания напряженного состояния будем пользоваться
компонентами напряжений второго тензора Пиолы- Кирхгофа и считать,
что на ( m )-м шаге нам эти напряжения известны, а на ( m 1)-м шаге их
требуется определить
(29)
( m1) ( m) ( m) , .
( m) = E e( m) .
Формулировку ПВП можно
конфигурации системы
T
e( m1)( m1)dV f( m1) ,
где
записать
относительно
(30)
начальной
(31)
V
где
f ( m1) U (Tm1) g dV U (Tm1) p dS ;
V
(32)
Sp
(33)
U( m1) U( m) ; e( m1) e( m) ( m) ( m) .
Тогда, оставляя в вариационном уравнении слагаемые первого и второго
порядков малости, получаем:
T
T
T
T
T
( (m)E (m) (m)(m) )dV U(m) g dV U(m) p dS ( (m)(m)dV , (34)
V
V
Sp
V
Задаемся аппроксимацией приращения перемещений
(35)
U( m) U( m) Φ q( m) ; ( m) B( m) q( m) .
Введем обозначения
K ( m ) BT( m )EB ( m ) dV ; P( m ) B (Tm ) ( m ) dV ; P T g dV T p dS .(36)
V
10
V
V
Sp
Тогда можно получить (K ( m) S( m) ) q( m) P P( m) .
(37)
Это уравнение позволяет получить приращение узловых степеней свободы и
сделать следующий шаг в итерационном процессе:
(38)
q( m1) = q( m) + Δ q( m) .
После анализа сделанного шага решения нелинейной задачи
принимается заключение: либо закончить итерационный процесс решения,
либо перейти на следующий шаг (оценка по относительной норме Δ q ( m ) ).
Для нелинейной задачи деформационные соотношения выражаются
формулой (3). Как видно из (3), только в деформации e x содержится
нелинейная составляющая
1
(39)
x ( w' )2 .
2
Линеаризованные обобщенные деформационные соотношении
(40)
є ( m ) L( m ) U ( m ) .
представим в развернутом виде
d
( m ) d dx
0
dx
x ( m )
c
s
0
r
r
y (m)
d
u
0
0
c
r
dx ( m )
xy ( m )
w( m ) .
2
d
0
x(m) 0
dx 2
v( m )
y (m)
2
0
sr cr sr cr d dx
xy ( m )
0
2 sr cr 2 sr d
0
dx
Соотношения упругости для многослойной оболочки представим в
виде:
(41)
N( m) Dє ( m) .
Для КЭ конической оболочки аппроксимацию приращений
перемещений принимаем в виде
(42)
U( m ) = Φ a .
Приращение угла поворота нормали будет определено
( m ) Ωa 0 0 0 1 2 x 3x 2 0 0 a .
(43)
Линеаризованные приращения деформаций для выбранной аппроксимации
перемещений будут иметь следующий
(44)
є ( m ) L ( m ) U ( m ) B ( m )a .
Далее для КЭ можно вычислить
l
l
l
l
K a B DB rdx, S a N x(m) rdx, Pa ( m ) B ( m ) N ( m ) rdx, Pap ФTp r dx .(45)
T
0
T
0
T
0
0
11
После формирования разрешающей СЛАУ МКЭ с учетом граничных
условий буем иметь
(46)
(K ( m) S( m) ) q( m) P( m) ,
где P(m) = Pp - P(m) - невязка внешних и внутренних сил.
В третьей главе представлен алгоритм разработанной программы
расчета и приведены решения тестовых задач.
С помощью разработанной программы решались тестовые задачи:
- 1-я: Расчет цилиндрической оболочки с полусферическим днищем;
- 2-я: Расчет выпукло-вогнутого днища.
Результаты полученных расчетов хорошо согласуются с численными и
аналитическими решениями Бидермана В. Л.
Тесты по нелинейной задаче сверялись с решениями ортотропной
цилиндрической оболочки под внутренним давлением. Полученные
результаты соответствуют результатам Голованова А.И.
В четвертой главе представлены решения задачи геометрической
стабильности многослойного корпуса антенных рефлекторов.
Композитные корпуса антенных рефлекторов имеют форму
параболических трехслойных сотовых конструкций: двух несущих слоёв
(НС) или обшивок и сотового заполнителя. Каждая обшивка состоит из
многослойного углепластика, а сотовый заполнитель изготовлен из
алюминиевой фольги (рис. 8).
Рис. 8. Трехслойный композитный рефлектор
Рассматривались оболочки диаметром 640 мм, при этом каждая из
обшивок рефлектора (НС) формовалась из четырёх монослоев углепластика.
Толщина НС после формования составляла 0,45...0,48 мм. Толщина монослоя
h =0,12мм. Заполнитель – алюминиевые соты высотой Н= 10мм. Структурная
12
схема рефлектора для расчёта приведена на рис. 9.
Оправка
аппроксимировалась сферическим сегментом с радиусом Rопр = 1100мм и
углом полураствора 16o .
Свойства
углепластика
E1 =
принимались
следующими:
128,8ГПа; E 2 = 2,8ГПа; G12 = 1 ГПа;
v12 = 0,33; 1o = - 10-6 1/град.; 2o =
30 10-6 1/град, т. к. формование
обшивок и последующее склеивание
происходит
при
повышенной
о
температуре 175 С.
Коэффициент
линейного
температурного
расширения
материала
оправки
принимался
0
6
равным 10 1/ град.
Рис.9. Структурная схема
трёхслойного пакета рефлекторов
Проведено сравнение результатов с экспериментальными данными. На
реальной конструкции после изготовления измерялись осевые перемещения.
Результаты расчёта и эксперимента приведены на рис. 10.
[0 45 -45 0 0 0 45 -45 0]
35
displacement Uz (mm)
30
25
20
15
10
5
0
0
50
100
150
200
250
300
350
s [mm]
Рис. 10. Осевые перемещения рефлектора при угле укладки =45;
- экспериментальные данные
Для оценки точности соответствия полученной геометрии поверхности
заданной теоретической форме производился расчет среднеквадратического
отклонения (СКО) поверхности в нормальном (к идеальному контуру)
направлении, т.е. СКО ( ) рассчитывали с использованием полученных
13
значений нормальных перемещений w . СКО двух функций f ( x) и F ( x) на
множестве n точек x1 , x2 ,..., xn определяется следующим образом:
1 n 2
wi ,
n i 1
где n 100 - число точек, wi - перемещение i - ой точки.
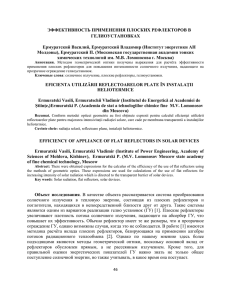
Для выявления рациональных схем армирования НС были рассчитаны
профили корпусов рефлектора при различных структурах несущих слоёв, а
также обобщенные зависимости значения среднеквадратического отклонения
для всех схем армирования в диапазоне 0o... 90o с интервалом в 1o.
В качестве базовых геометрических параметров принимались:
hзап 10 мм; Rопр 1100 мм; структуры несущего слоя 0/ / / 0 ; толщины
композитных слоев:
показаны на рис. 11.
h0 ; h ; 0,12 мм.
Результаты
расчетов
70
60
sko (mm)
50
40
30
20
10
0
0
10
20
30
40
50
Fi (degree)
60
70
80
90
Рис. 11. Зависимость СКО от угла укладки в несущем слое
Как видно из графика, для схемы армирования 0O / 59O / 59O / 0O в
этом случае удается получить минимальные величины нормальных
перемещений и СКО. При данной схеме реализации технологического
процесса можно получить необходимую точность геометрии изделия,
14
0O / 59O / 59O / 0O . Для
структуры несущих слоев при 59o установлена качественная смена
равновесных форм (оболочка становится выпуклой), а при 59o оболочка
остается вогнутой.
Проведено исследование равновесных форм в зависимости от перепада
температуры T . Для структуры несущих слоев [0/60/-60/0] установлена
качественная смена равновесных форм при изменении перепада температуры
от 0о до -200о. Для структуры несущих слоев [0/45/-45/0] установлено, что
качественная смена равновесных форм при изменении перепада температуры
от 0о до -200о не происходит. В условиях определенной равновесной формы
при увеличении перепада температуры T СКО также увеличивается (рис.
12).
применяя схему укладки монослоёв в НС
25
20
sko (mm)
15
10
5
0
0
50
100
150
- Delta T
Рис. 12. Зависимость СКО от перепада температуры T при =45о
На основании разработанной программы можно производить
корректировку (доработку) кривизны оснастки для получения изделия
необходимой геометрии в различных схемах армирования и при
определенной температуре. С помощью данных расчетов становится
возможно на этапе проектирования и выбора конструкторскотехнологических параметров изделия оценить, какую кривизну (фокусное
расстояние, диаметр, высоту прогиба и пр.) после изготовления примет
конструкция.
ОСНОВНЫЕ ВЫВОДЫ
1. Разработанный
метод
расчёта
дает
возможность
учитывать
геометрическую стабильность в процессе изготовления конструкции.
Проведено исследование геометрической стабильности конструкции
15
рефлектора в зависимости от схемы укладки несущих слоев и от перепада
температуры.
2. Созданный программный комплекс помогает решать поставленную в
настоящей работе задачу и аналогичные задачи на более широком классе
конструкций с учетом условий эксплуатации.
3. Разработанные
теоретические
рекомендации
по
изготовлению
трёхслойных сотовых конструкций двойной кривизны из композитных
материалов могут быть использованы в космической промышленности.
4. Результаты исследования и разработанный метод были применены при
технологической отработке и изготовлении параболической антенны на
предприятии РКК «Энергия». Они позволили существенно снизить
временные и материальные затраты на подготовку производства и отработку
технологии изготовлении этих конструкций.
В приложении приведен типовой пример расчета задачи о нелинейном
деформировании корпуса рефлектора с учетом температурных и начальных
деформаций
Основное содержание диссертации отражено в следующих работах:
1. Данг Н. А. Решение задачи геометрической стабильности анизотропных
композитных корпусов антенных рефлекторов // Вестник МГТУ им. Н. Э.
Баумана. Машиностроение. – 2008. - № 1. - С. 77-89.
2. Данг Н. А. Решение геометрически
нелинейной задачи статики
анизотропных композитных корпусов антенных рефлекторов // Известия
вузов. Машиностроение. – 2008. - № 3. - С. 13-22.
3. Попов Б. Г., Данг Н. А. Нелинейная задача геометрической стабильности
анизотропных композитных корпусов антенных рефлекторов // Ракетнокосмическая техника: фундаментальные и прикладные проблемы. Тез. докл.
3-й международной научной конференции. - М., 2007. - С. 23-27.
16