Исследование потери устойчивости стержня при динамическом нагружении сжимающей силой
реклама

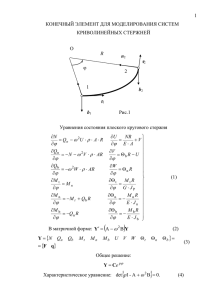
Санкт-Петербургский государственный политехнический университет Исследование потери устойчивости стержня при динамическом нагружении сжимающей силой студент Клак М.А. Научный руководитель доктор ф.-м. наук, профессор: Иванова Е.А. 2013 г. Постановка задачи Рассматривается первоначально прямолинейный безынерционный стержень с массой на верхнем конце. Решается задача о потери устойчивости этого стержня в случае действия на него динамической сжимающей силы. Уравнения движения стержня Уравнения движения: 𝑁 ′ (𝑠, 𝑡) = 0 𝑀′ (𝑠, 𝑡) + 𝑅′ (𝑠, 𝑡) × 𝑁(𝑠, 𝑡) = 0 Соотношение упругости: 𝑀 = 𝐶3 − 𝐶1 𝑡 ∙ 𝑃𝑇 ∙ Ф Векторы деформации: 𝑃′ = Ф × 𝑃 𝑃 ∙ 𝑡 + 𝐶1 Ф ε = 𝑅′ − 𝑃 ∙ 𝑡 В классической теории стержней: ε=0 ⇒ 𝑅′ = 𝑃 ∙ 𝑡 Граничные условия Условия жесткой заделки на нижнем конце: 𝑅|𝑠=0 = 0, 𝑃|𝑠=0 = 𝐸 Условия на верхнем конце стержня: уравнение движения груза: 𝑚(𝑡 ∙ 𝑅)|𝑠=𝑙 = −𝐹 𝑡 − 𝑚𝑔 − (𝑡 ∙ 𝑁|𝑠=𝑙 ) 𝑅|𝑠=𝑙 ∙ 𝐸 − 𝑡 𝑡 = 0 𝑁|𝑠=𝑙 ∙ 𝐸 − 𝑡 𝑡 = 𝐹 ∗ Груз шарнирно прикреплен к стержню: 𝑀|𝑠=𝑙 = 0 Решение уравнений статики стержня Вектор силы: 𝑁 = 𝑁|𝑠=𝑙 Вектор деформации: Ф = 𝑅′ × 𝑅" Вектор момента: 𝑀 = 𝐶1 Ф ⇒ 𝑀 = 𝐶1 𝑅′ × 𝑅" Доказывается, что конфигурация изогнутого стержня – плоская 𝑃 = 𝑃 ψ𝑏 ⇒ 𝑅′ = 𝑐𝑜𝑠ψ𝑡 + sinψ𝑛 Итоговое выражение для вектора моментов: 𝑀 = 𝐶1 ψ′𝑏 Краевая задача для ψ Дифференциальное уравнение: 𝐶1 Ψ"(𝑠) + (𝑛 ∙ 𝑁)𝑐𝑜𝑠Ψ − (𝑁 ∙ 𝑡)𝑠𝑖𝑛Ψ = 0 Граничные условия: Ψ𝑠=0 = 0 Ψ′𝑠=𝑙 = 0 Введем обозначения: 𝑁 = 𝑁𝑒, 𝑒 ∙ 𝑛 = −𝑠𝑖𝑛𝛽, 𝑒 ∙ 𝑡 = −𝑐𝑜𝑠𝛽 Замена переменных: ψ = ψ − 𝛽 Краевая задача в новых обозначениях: 𝐶1 ψ"(𝑠) + 𝑁𝑠𝑖𝑛ψ = 0 ψ𝑠=0 = −𝛽 ψ′𝑠=𝑙 = 0 Первый интеграл Первый интеграл уравнения с учетом ψ′𝑠=𝑙 = 0 ′ ψ = ±2 𝑁 𝐶1 ψ𝑙 2 𝑠𝑖𝑛 2 − ψ 2 𝑠𝑖𝑛 2 , где ψ𝑙 =ψ|𝑠=𝑙 𝑁 = 𝑁𝑒 ⇒ 𝑁 > 0 ⇒ 2 ψ𝑙 𝑠𝑖𝑛 2 − 2ψ 𝑠𝑖𝑛 2 ≥0 ⇒ ψ 2 ψ𝑙 2 𝑠𝑖𝑛 2 𝑠𝑖𝑛2 ≤1 Решение в квадратурах ψ Введем новую переменную θ: 𝑠𝑖𝑛θ = 𝑠𝑖𝑛 2 ψ 𝑠𝑖𝑛 2𝑙 Дифференциальное уравнение для θ: 2 θ′ = 𝑁 𝐶1 2 ψ𝑙 2 2 1 − 𝑠𝑖𝑛 ξ 𝑠𝑖𝑛 θ , где ξ = Используем граничное условие: ψ|𝑠=0 = −𝛽 𝜃|𝑠=0 = θ0 , где 𝑠𝑖𝑛θ0 = − 𝑠𝑖𝑛 𝑠𝑖𝑛 𝛽 ψ𝑙 Решение задачи в квадратурах имеет вид : 𝑁 𝑠= 𝐶1 θ θ0 𝑑𝜏 1 − 𝑠𝑖𝑛2 ξ 𝑠𝑖𝑛2 𝜏 2 2 Критическая𝜋сила 2 𝑁 𝑙=𝐽 ξ , 𝐶1 𝑑𝜏 где 𝐽(ξ) = 1 − 𝑠𝑖𝑛2 ξ 𝑠𝑖𝑛2 𝜏 θ0 J(ξ) принимает минимальное значение при ξ=0 𝐽 0 = 𝜋 θ0 2 𝑑𝜏 = 𝜋 2 − θ0 Следовательно: (𝜋 − 2𝛳0𝑐𝑟 )2 𝐶1 𝑁𝑐𝑟 = 4𝑙2 𝑐𝑡𝑔𝛳0𝑐𝑟 = 𝜋 2 − 𝛳0𝑐𝑟 𝑁 𝑙≥𝐽 0 𝐶1 Определение радиус вектора 𝑅′ = 𝑐𝑜𝑠ψ𝑡 + sinψ𝑛, 𝑠 𝑅=𝑡 𝑅|𝑠=0 = 0 𝑠 𝑐𝑜𝑠ψ𝑑𝑠 + 𝑛 0 𝑠𝑖𝑛ψ𝑑𝑠 0 Спасибо за внимание