Стержневой конечный элемент для расчетов с большими
реклама

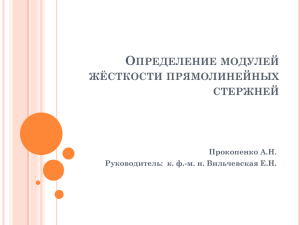
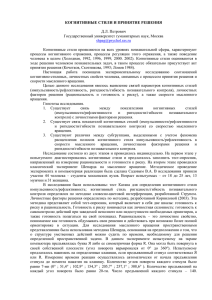
СТЕРЖНЕВОЙ КОНЕЧНЫЙ ЭЛЕМЕНТ ДЛЯ РАСЧЕТОВ С БОЛЬШИМИ ПЕРЕМЕЩЕНИЯМИ И ВРАЩЕНИЯМИ П. Ю. Семенов ООО Техсофт, Москва, Россия 1. Введение. Линейная теория стержней хорошо понята с точки зрения численной реализации в рамках метода конечных элементов. Описание стандартного элемента приведено, например, в [1, с. 128–132]. Элемент основан на теории, учитывающей поперечный сдвиг, и имеет обычные степени свободы: перемещения нейтральной линии и углы поворота сечения. Элемент не испытывает сдвигового запирания, более того, предельный переход к теории без сдвиговых деформаций осуществляется внутри матрицы жесткости точно. В то же время представляют интерес геометрически нелинейные постановки [2]. В настоящей работе строится нелинейный элемент, который в режиме малых деформаций дает те же результаты, что и элемент из [1]. 2. Принцип виртуальной работы. Рассмотрим декартову систему координат x, y, z , с ортами i1 , i 2 , i 3 , ось x которой направлена вдоль нейтральной оси стержня, а другие оси совпадают с главными осями сечения. Для стержней с недеформируемым плоским сечением поле перемещений v выглядит следующим образом: (1) v u y ~i2 i 2 z ~i3 i 3 , где u – перемещение оси стержня, ~i и ~i – повернутые орты исходного базиса 2 3 ~i Λi и ~i Λi , 3 3 2 2 Λ – ортогональная матрица поворота. Вводя векторы a и b такие, что (2) (3) a Λ Ii 2 и b Λ I i 3 , где I – единичная матрица, получим поле перемещений (1) в виде (4) v u ya zb . Подставляя выражение (4) в принцип виртуальной работы, сформулированный через тензор деформации Грина, для линейного изотропного материала получим EA L x x EJ y k yk y EJ z k zk z GAy y y GAz z z GJ x k xk x dx Fext , (5) 0 где E и G – модули упругости и сдвига, L – длина стержня, A – площадь его поперечного сечения, Ay и Az – сдвиговые площади, J x , J y и J z – моменты инерции сечения. В правой части собрана виртуальная работа внешних сил. Продольная деформация x , деформации сдвига y и z , а также кривизны k y , k z и k x , выражаются через компоненты векторов u , a и b x ux 12 uiui , y a x u y uiai , z bx uz uibi , (6) k y bx uibi , k z a x uiai , k x ca a z bi ai cb bz ai bi , (7) где подразумевается суммирование по повторяющимся индексам, штрих означает дифференцирование по x . Коэффициенты ca и cb зависят от формы поперечного сечения. Вторая вариация левой части выражения (3) EAd x x EJ y dk yk y EJ z dk zk z GAy d y y GAz d z z GJ x dk xk x dx (8) 0 EJ y k y dk y EJ z k z dk z GAy y d y GAz z d z GJ x k x dk x дает формулу для построения касательной матрицы жесткости. L 3. Параметризация вращений. В дальнейших построениях будем использовать параметризацию матрицы поворота Λ посредством вектора конечного вращения θ ΛI sin Sθ 1 cos Sθ Sθ , 2 0 где θ , а кососимметричная матрица Sθ z y z 0 (9) y x . При этом единичный 0 вектор e θ θ определяет ось вращения, а величина – угол поворота. 4. Построение матрицы жесткости. Перемещение оси стержня будем интерполировать кубическими функциями формы. Узловыми параметрами при этом выберем перемещения концов стержня u1 и u 2 и их производные u1 и u2 x u 1 x u1 2 x u 2 3 x u1 4 x u2 . Для векторов a и b будем использовать квадратичную интерполяцию (10) (11) a 1 x a1 2 x a 2 3 x a3 и b 1 x b1 2 x b 2 3 x b 3 , где a1 , a 2 , b1 , b 2 и a 3 , b 3 – значения, принимаемые векторами a и b на концах и в середине стержня. При этом, в силу (9), узловыми степенями свободы будут компоненты вектора конечного вращения θ в соответствующих точках a1 Λθ1 Ii 2 , b1 Λθ1 I i 3 и т.д. Определяя деформации и кривизны (6)–(7), а также их вариации, используя аппроксимации (10)–(11), и, подставляя затем полученные при этом выражения в (8), получим матричную запись второй вариации левой части (5) dq T K q q , где вектор qT u1 u2 u1 u2 θ1 θ2 θ3 T составлен из введенных ранее узловых параметров, K – касательная матрица жесткости стержневого элемента. Чисто технической сложностью при реализации алгоритма является необходимость выражать вариации a , b и da , db через приращения θ и dθ . Например, для вектора a имеем a Λθi 2 Δ1 θ, θi 2 и da dΛθi 2 Δ2 θ, θ, dθi 2 , то есть необходимо дважды дифференцировать выражение (9). Формулы для матриц Δ1 θ, θ и Δ2 θ, θ, dθ получаются громоздкими, в развернутом виде они приводятся в [3]. Непрерывности производных не требуется, поэтому можно исключить параметры u1 и u2 на уровне элемента. Также, исключая в промежуточной точке вектор конечного вращения θ 3 , получим элемент с обычными степенями свободы в узлах: тремя поступательными и тремя вращательными. Можно показать, что при бесконечно малых перемещениях и вращениях элементы полученной таким образом касательной матрицы будут совпадать с элементами “линейной” матрицы из [1]. 5. Обобщенный момент. В результате решения системы уравнений будут найдены компоненты перемещений и вращений в узлах конструкции. После этого могут быть найдены реакции в узлах элемента (усилия в сечении). Если реакции, соответствующие перемещениям, являются силами, то реакции, соответствующие вращательным степеням свободы, не являются моментами. Это некие обобщенные моменты, сопряженные с вектором конечного вращения. Истинный же момент сопряжен с виртуальным вращением. Связь между обобщенным и истинным моментом можно получить, зная связь между приращением вектора конечного вращения θ и виртуальным вращением φ : φ Tθ . Приравняем элементарную работу истинного момента m и обобщенного g : m T φ g T θ . Отсюда mT Tθ g T θ и, следовательно, m T T g . Формулы для матриц T , T 1 приведены, например, в [4]: 2 1 1 S S . (12) 2 tg 2 Заметим, что, в отличие от формулы (9), выражение (12) не определено при 2n , n 1, 2, Это выявляет потенциальную неоднозначность параметризации (9), если полный поворот больше 2 . Но в задачах, где повороты не столь велики, вектор конечного вращения может успешно использоваться. 6. Примеры. Были решены как простейшие плоские задачи, так и более сложные трехмерные. Первым двумерным тестом является заделанный с одного торца стержень. На свободном торце приложена поперечная сила или изгибающий момент. Исходная и деформированная геометрии представлены на рис. 1. T 1 I 12 S Рис. 1 Рис. 2 На рис. 2 представлена пространственная рама [5]. Две нижние точки полностью заделаны, третья закреплена в двух направлениях, а по третьему производится растяжение. Приводятся деформированные схемы для двух разных по величине нагрузок. В этих и других задачах имеется хорошее соответствие с аналитическими решениями или численными результатами других авторов. 7. Заключение. Полученный в настоящей работе элемент является, по существу, расширением элемента [1] в геометрически нелинейную область. В линейной области матрицы этих элементов совпадают и, следовательно, сдвиговое запирание отсутствует. Численное тестирование показало, что запирание не проявляется и в нелинейном случае. ЛИТЕРАТУРА 1. Усюкин В.И. Строительная механика конструкций космической техники. – М.: Машиностроение, 1988. – 392 с. 2. Перельмутер А.В., Сливкер В.И. Ошибки и парадоксы пространственных геометрически нелинейных задач и задач устойчивости равновесия // Актуальные проблемы компьютерного моделирования конструкций и сооружений. Тезисы симпозиума. Н. Новгород. 5–8 июня 2007. – С. 11–13. 3. Parisch H. An investigation of a finite rotation four node assumed strain shell element // Int. J. Numer. Meth. Engng. – 1991. – Vol. 31. – 127–150. 4. Ibrahimbegovic A., Frey F. Stress resultant geometrically nonlinear shell theory with drilling rotations. Part II: Computational aspects // Comput. Methods Appl. Mech. Engrg. – 1994. – 118. – P. 258–308. 5. Conci A., Gattass M. Natural approach for geometric non-linear analysis of thin-walled frames // Int. J. Numer. Meth. Engng. – 1990. – Vol. 30. – P. 207–231.