8шилин
реклама

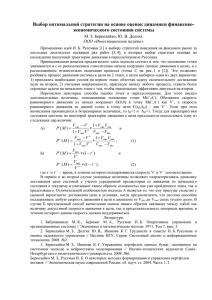
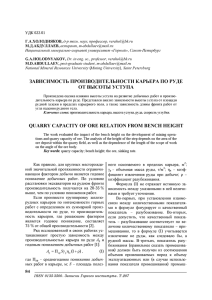
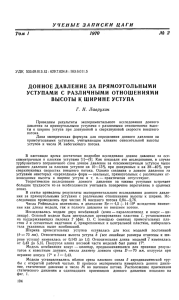
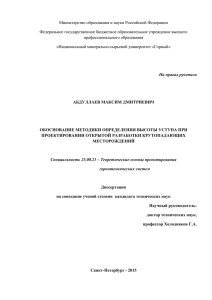
ОРГАНІЗАЦІЯ ТА УПРАВЛІННЯ ПРОЦЕСОМ ПЕРЕВЕЗЕНЬ УДК 625.7 : 662.2 Шилин И.В., к.т.н., доц. (АДИ ГВУЗ «ДНТУ») Грицук Ю.В., к.т.н., доц. (ДонНАСА) Бурых А.М., студентка (АДИ ГВУЗ «ДНТУ») О ВОПРОСАХ ОСОБЕННОСТЕЙ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ В РЕГИОНАЛЬНЫХ УСЛОВИЯХ ЦЕНТРАЛЬНОГО РАЙОНА ДОНБАССА Актуальность.При разработке свит крутопадающих угольных пластов на земной поверхности образуются локальные деформации в виде выпуклости и вогнутости, т.е. уступа. Для предотвращения аварийных ситуаций при проезде по участкам автомобильных дорог с расположенными на них уступами необходима хорошая видимость поверхности дороги, однако обеспечить ее не всегда представляется возможным. Альтернативным вариантом предотвращения аварийных ситуаций является принудительное регулирование скоростного режима. Рассмотрим некоторые из вопросов регулирования режимов дорожного движения на опасных участках, которые в условиях Донецкого региона являются достаточно актуальными. Основной материал.В большинстве случаев трасса уступа проходит через всю зону влияния подработки (мульду сдвижения) параллельно направлению залегания отрабатываемых пластов. Зона кривизны выпуклости и вогнутости ( l y - длина уступа) обычно не превышает 5 м, максимальная высота достигает 50 см. Профили уступов достаточно хорошо описываются интегральной функцией Гаусса (погрешность составляет 7% от максимальной высоты уступов [1]) в виде: h y x h yo х а 1 Ф , 2 в (1) где, h y x - высота уступа в точке с абсциссой х, мм; h yo – максимальная высота уступа, мм; а – расстояние от бровки уступа до точки с максимальным наклоном, м; Збірник наукових праць ДонІЗТ. 2010 №23 60 ОРГАНІЗАЦІЯ ТА УПРАВЛІННЯ ПРОЦЕСОМ ПЕРЕВЕЗЕНЬ в – расстояние между точками максимального максимальной кривизны, м. Установлена зависимость между параметром в и l y : наклона в 0.2 , ly и (2) Расстояние между трассами уступов может составлять от нескольких метров до десятков метров, и для решения инженерных задач в качестве расчетной величины принимается равной 30 м [2]. Модель расположения уступов на профиле дороги представлена на рис. 1а. Таким образом, профиль дороги представляет собой периодически повторяющиеся неровности, графически представленные на рис. 1б. Указанные неровности описываются функцией (1). а) ly ly l б) x hyo hy ly Рисунок 1. - Расчетная схема: а - пример расположения уступов на профиле автомобильной дороги; б - графическое изображение уступа Збірник наукових праць ДонІЗТ. 2010 №23 61 ОРГАНІЗАЦІЯ ТА УПРАВЛІННЯ ПРОЦЕСОМ ПЕРЕВЕЗЕНЬ 50 vmax А v Sв С vmin конец зоны действия знака начало зоны действия знака где l y - длина уступа, м; l - расстояние между уступами Как правило, однажды обозначившаяся трасса уступов на проезжей части автомобильной дороги будет проявляться на ней постоянно, даже после ремонтно-восстановительных работ. Таким образом, участки с уступами можно считать как неблагоприятные для проезда транспортных средств со скоростью, регламентируемой категорийностью данной дороги. На сегодняшний день универсальных методов предотвращения уступообразования не применяется, следовательно, актуальной задачей становится своевременное информирование водителя транспортного средства о состоянии дороги, а также об оптимальном скоростном режиме движения. Таким образом, перед началом таких участков целесообразно предоставлять для водителя информацию в виде дорожных знаков о состоянии покрытия и ограничении скорости. Данный вариант реализуется в виде следующей схемы: Д vmax So Рисунок 2. - Схема для определения условий движения (СД –участок трассы дороги где сосредоточены уступы) Поскольку амплитуда вынужденных колебаний соответствует высоте уступа h yo , то исходя из условия, что кратковременное амплитудное ускорение hy x 10.2 м с2 является предельно допустимым по условиям его восприятия водителем [3], следовательно, можно оценить влияние высоты уступа h yo на возникновение частот колебаний транспортного средства при проезде им без снижения скорости (т.е. vmax ) участка дороги с уступами. Автомобиль, движущийся по дороге с неровной поверхностью, испытывает колебания с различной частотой и амплитудой. Установлено [3], что для человека наиболее чувствительны частоты колебаний 4÷8 Гц, Збірник наукових праць ДонІЗТ. 2010 №23 62 ОРГАНІЗАЦІЯ ТА УПРАВЛІННЯ ПРОЦЕСОМ ПЕРЕВЕЗЕНЬ что в нашем случае может быть отождествлено с проездом участка СД со скоростью, которая вызовет колебания с частотой в заданных пределах. На рисунке 2 участок S в – это путь, необходимый для обеспечения снижения скорости с vmax (определяется технической категорией дороги) до vmin (скорость, предписываемая дорожным знаком), который может быть определен по следующей формуле: vmax vmin K э v max vmin , 3.6 254 i f 2 Sв (3) где: Кэ – коэффициент эффективности тормозной системы автомобиля; φ- коэффициент сцепление шины с покрытием; i- продольный уклон участка дороги (на рис. 2 – участок АС); f- коэффициент сопротивления качению. Модель «уступ-дорога-автомобиль» является динамической, поскольку установлено, что скорость роста уступа может достигать 50 мм в год [1], следовательно, участки с уступообразованиями на дорогах, должны находиться под постоянным наблюдением не только дорожноэксплуатационных служб, но и служб организации движения. Данная модель может быть положена в основу реализации требования обязательного снижения скорости при проезде отдельных участков автомобильных дорог, то есть устройство на дороге искусственных периодических неровностей, обуславливающих возникновение колебаний автомобиля с частотой 4÷8 Гц (критическая частота), если водитель не снизит скорость движения автомобиля до рекомендуемой дорожным знаком. Для примера можно рассмотреть возможность регулирования движения транспортных средств по дороге с синусоидальными неровностями (рис. 3), описываемых формулой q qo 2 2 x 1 cos , s (4) где, qo – высота неровности, м; s- длина неровности, м; x- расстояние центра тяжести автомобиля от начала отсчета (начала координат) до искомого положения на неровности. Збірник наукових праць ДонІЗТ. 2010 №23 63 ОРГАНІЗАЦІЯ ТА УПРАВЛІННЯ ПРОЦЕСОМ ПЕРЕВЕЗЕНЬ q qo qi x xi xo s Рисунок 3. - Расчетная схема синусоидальной неровности 50 vmax v А В Sс vmin С конец зоны действия знака начало зоны действия знака Тогда рисунок 2 можно видоизменить, разбив участок АС S в на два отрезка: АВ S c - путь, необходимый для обеспечения снижения скорости с vmax до vmin при условии, что водитель выполняет предписание знака; ВС S a путь с искусственно устраиваемыми периодическими неровностями, которые обуславливают возникновение колебаний с критической частотой, если водитель игнорирует предписание дорожного знака и продолжает двигаться со скоростью соответствующей категории дороги. vmax Д Sа So Sв Рисунок 4. - Уточненная схема для определения условий движения Длина участка АВ S c определяется по формуле (3). Длина неровности s в формуле (4) может быть найдена как [3] s 2 v , 3 .6 где, v - скорость движения автомобиля, км ч ; Збірник наукових праць ДонІЗТ. 2010 №23 64 (5) ОРГАНІЗАЦІЯ ТА УПРАВЛІННЯ ПРОЦЕСОМ ПЕРЕВЕЗЕНЬ - частота колебаний, Гц. Принимая v vmax и c 8 Гц, длина неровности s 1 будет равна s 1 2 vmax , 3.6 c (6) Частота вынужденных колебаний c 8 Гц принята из условия, что даже если водитель и снизил скорость движения, но не достаточно ( vmax v vmin ), колебания будут находиться в интервале частот 4÷8 Гц. Для определения амплитуды вынужденных колебаний q o (рис 3), исходят из тех же условий, что и для модели с уступом, т.е. кратковременная амплитуда ускорения hy x 10.2 м 2 . Тогда согласно с формулы (4), имеем 0,5 q o v 2 cos( t ) q (7) откуда высота искусственной синусоидальной неровности q o равна qo 2 q 2 c 2 10.2 0.32 , 82 (8) что сопоставимо с высотами уступов, зарегистрированными в Центральных районах Донбасса [1]. Длину участка s a (рис. 4) можно подобрать с учетом следующих требований: – время между восприятием водителем информации и началом процесса торможения t p 2 с [4]; – ускорение кузова автомобиля достигает наибольшей величины при преодолении третьей неровности [3]. Тогда длина участка будет определяться следующим образом: sa vmax t p 3 s 1 , 3.6 (9) где s 1 - длина неровности, вычисленная по формуле (6), м. Выводы . На основании вышеизложенного можно предположить, что: Збірник наукових праць ДонІЗТ. 2010 №23 65 ОРГАНІЗАЦІЯ ТА УПРАВЛІННЯ ПРОЦЕСОМ ПЕРЕВЕЗЕНЬ - уступообразные деформации проезжей части дорог вынуждают водителя снижать скорость ниже допустимой для данной категории дороги, что обуславливает снижение технико-эксплуатационных показателей (интенсивность движения, пропускная способность, плотность потока), снижение безопасности движения и увеличение вероятности возникновения дорожно-транспортных происшествий, сокращение срока службы покрытия в результате динамического воздействия колеса автомобиля о гребень уступа, и т.д.; – эффективным является регулирование скорости движения с применением знаков ограничения скорости с дублированием этих требований путем устройства перед опасным участком, участка с искусственными выпуклыми неровностями (аналогичные ситуации возможны в местах жесткими требованиями по ограничению скорости движения – оползневые участка, участки расположенные на просадочных грунтах и на слабом основании, в заповедниках, в непосредственной близости от мест сосредоточения детей и т.д.); – устройство периодических неровностей с различными геометрическими параметрами для разных полос движения на проезжей части помогает обеспечить движение транспортных средств с заданными скоростями. Список литературы. 1. 2. 3. 4. Сирик А.Г. Прогноз геометрических параметров уступов на земной поверхности при разработке свит крутых пластов в Донбассе. Автореферат на соискание ученой степени к.т.н. – Ленинград, 1990. – 17 с. Правила охраны сооружений и природных объектов от вредного влияния горных разработок на угольных месторождениях. – М.: Недра, 1981. – 288 с. Ротенберг Р.В., Подвеска автомобиля. – М.: Машиностроение, 1972. –212 с. Бабков В.Ф., Андреев О.Б. Проектирование автомобильных дорог. Ч.1. – М.: Транспорт, 1970. Збірник наукових праць ДонІЗТ. 2010 №23 66