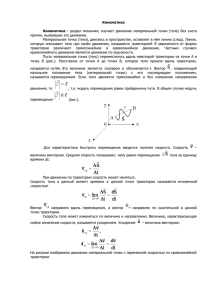
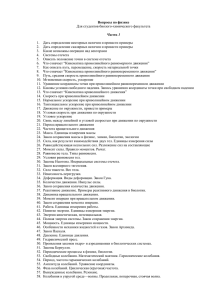
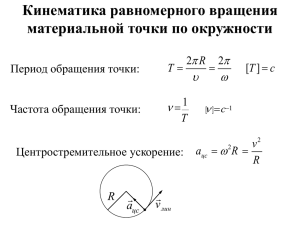
Основные кинематические понятия и характеристики. Механика изучает механическое движение, которое является простейшей формой движения материи. Основная задача механики - определение положения тела в любой момент времени, если известно его начальное положение. В зависимости от методов решения этой задачи механику разделяют на 3 части: 1) статика - учение о механическом равновесии; 2) кинематика - учение о механическом движении без учета причин, вызывающих это движение; 3) динамика – учение о механическом движении с учетом причин, его вызывающих. Механическое движение - это изменение положения тел или их частей в пространстве с течением времени. Основным объектом изучения в кинематике является материальная точка. Понятие “материальная точка” есть физическая абстракция, модель, которая вводится для упрощения описания движения. Материальной точкой называют тело, размерами и формой которого можно пренебречь в условиях данной задачи. Если реальное тело нельзя заменить материальной точкой, используют другую физическую модель – абсолютно твердое тело. Абсолютно твердым телом называют тело, деформациями которого можно пренебречь в условиях данной задачи. В действительности же все реальные тела при воздействии на них деформируются. Все виды механических движений можно свести к поступательному и вращательному движениям. Материальная точка может участвовать только в поступательном движении, прямолинейном или криволинейном, т.к. говорить о вращении точки, не имеющей размеров, бессмысленно. Поступательным назвали такое движение, при котором любая прямая, проведенная в теле, остается параллельной самой себе (рис.1). Вращательным назвали такое движение, при котором все точки тела описывают концентрические окружности, центры которых лежат на одной прямой, называемой осью вращения (рис.2). Ось вращения может находиться вне тела. Произвольное движение тела можно рассматривать как сочетание поступательного и вращательного движений. Для описания положения и движения тела необходимо выбрать систему отсчета. Системой отсчета называют связанную с часами систему координат, жестко связанную с некоторым физическим телом, называемым телом отсчета. Для описания движения используют понятия: траектория, путь, перемещение, скорость, ускорение. Траектория - линия, описываемая точкой в пространстве (прямолинейная или криволинейная). Если траектория лежит в одной плоскости, движение называют плоским. Путь S - длина траектории, скалярная величина. Перемещение 𝑟⃗ - вектор, соединяющий начальное и конечное положение точки и направленный к конечному положению. Средняя скорость перемещения равна отношению перемещения dr к интервалу времени dt, за которое это перемещение произошло Мгновенная скорость - векторная величина, равная первой производной радиуса-вектора движущейся точки по времени. Работа A определяется как произведение модуля силы на модуль перемещения Мощность - это величина, характеризующая скорость совершения работы. Мощность N есть отношение работы A ко времени t, за которое эта работа 𝐴 совершена:𝑁 = 𝑡 Типы вращательного движения а) переменное – вращательное движение, при котором изменяются угловая скорость ω и угловое ускорение ε: 𝑑𝜑 𝑑𝜔 𝜔= ; 𝜀= 𝑑𝑡 𝑑𝑡 б) равнопеременное – вращательное движение с постоянным угловым ускорением ε: 𝜔 = 𝜔0 + 𝜀𝑡 в) равномерное – вращательное движение с постоянной угловой скоростью. Равномерное вращательное движение можно характеризовать периодом T и частотой вращения ν. 𝑡 Период – это время, за которое тело совершает один полный оборот: 𝑇 = , 𝑁 где t - время за которое происходит один полный оборот. Частота вращения – это число оборотов, совершаемых за единицу времени. 2𝜋 𝜔= = 2𝜋𝜈 𝑇 Основные законы: 1 закон Ньютона: закон инерции — если действие внешних сил на тело скомпенсировано, то покоящееся тело будет оставаться в покое, а движущееся тело останется в равномерном движении по прямой. 2 закон Ньютона: основной закон динамики — в инерциальной системе отсчёта ускорение, которое получает материальная точка с постоянной массой, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе. Импульсная форма: В инерциальной системе отсчёта скорость изменения импульса материальной точки равна равнодействующей всех приложенных к ней внешних сил. 3 закон Ньютона: два взаимодействующих тела действуют друг на друга с равными по величине и противоположными по направлению силами. Теорема об изменении кинетической энергии: работа силы или равнодействующей всех сил равна изменению кинетической энергии тела. 7.1.2. Основные формулы ⃗⃗ = Скорость мгновенная: 𝒗 ⃗⃗ 𝒅𝒓 𝒅𝒕 где 𝑟⃗ – радиус-вектор материальной точки, t – время; ⃗⃗ 𝒅𝒓 𝒅𝒕 – производная радиус-вектора материальной точки по времени. v Модуль вектора скорости: ds dt , где s – расстояние вдоль траектории движения (путь) v Скорость средняя (модуль): s , t s s 2 s1 , t t 2 t 1 . ⃗⃗ = 𝒂 Ускорение мгновенное: ⃗⃗ 𝒅𝒗 𝒅𝒕 Модуль вектора ускорения при прямолинейном движении: 𝑎= ∆𝒗 ∆𝒕 Уравнение движения материальной точки: 𝑥 = 𝑥0 + 𝑣0 𝑡 + Ускорение при криволинейном движении: 𝑎𝑡 2 2 v2 an , R нормальное где R – радиус кривизны траектории, a тангенциальное полное (вектор) dv ; dt 𝑎⃗ = ⃗⃗⃗⃗⃗ 𝑎𝑛 + ⃗⃗⃗⃗⃗ 𝑎𝜏 ; a a 2n a 2 . (модуль) Скорость и путь при движении: v const, равномерном s vt , at 2 v v 0 at , s v 0 t . 2 равнопеременном v0 – начальная скорость; а > 0 при равноускоренном движении; а < 0 при равнозамедленном движении. Угловая скорость: d , dt d dt . где - угловое перемещение. Угловое ускорение: Связь между линейными и угловыми величинами: s R , v R , a R , a n 2 R . Импульс материальной точки: 𝑝⃗ = 𝑚𝑣⃗ где m – масса материальной точки. Основное уравнение динамики поступательного движения (II закон Ньютона): 𝐹⃗ = 𝑎⃗𝑚 𝑑𝑝⃗ 𝐹⃗ = 𝑑𝑡 (II закон Ньютона в импульсной форме) , где 𝐹⃗ –результирующая сила, 𝐹⃗ = ∑𝑛𝑖=1 ⃗⃗⃗⃗ 𝐹𝑖 Формулы сил: тяжести 𝐹 = 𝑚𝑔, где g – ускорение свободного падения трения Fтр N , 𝐹тр = 𝜇𝑚𝑔 ∙ cos 𝛼 где – коэффициент трения, N – сила нормального давления, α – угол наклона плоскости, упругости Fупр kx , где k – коэффициент упругости (жесткости), х – деформация (изменение длины тела). Закон сохранения импульса для замкнутой системы, состоящей из двух тел: 𝑚1 ⃗⃗⃗⃗⃗ 𝑣1 + 𝑚2 𝑣 ⃗⃗⃗⃗⃗2 = 𝑚1 ⃗⃗⃗⃗⃗ 𝑢1 + 𝑚2 ⃗⃗⃗⃗⃗ 𝑢2 где ⃗⃗⃗⃗⃗ 𝒗𝟏 и ⃗⃗⃗⃗⃗ 𝒗𝟐 – скорости тел до взаимодействия; ⃗⃗⃗⃗⃗ 𝒖𝟏 и ⃗⃗⃗⃗⃗ 𝒖𝟐 – скорости тел после взаимодействия. Потенциальная энергия тела: поднятого над Землей на высоту h Wп mgh , упругодеформированного k (x )2 Wп . 2 Кинетическая энергия поступательного движения: mv 2 Wк . 2 Работа постоянной силы: A Fs cos , где - угол между направлением силы и направлением перемещения. Полная механическая энергия: Закон сохранения энергии: W Wк Wп . W1 W2 , силы консервативны A W, W W2 W1 , силы неконсервативны где W1 – энергия системы тел в начальном состоянии; W2 – энергия системы тел в конечном состоянии. Момент инерции тел массой m относительно оси, проходящей через центр инерции (центр масс): I0 mR 2 , тонкостенного цилиндра (обруча) где R – радиус, I0 сплошного цилиндра (диска) I0 шара 1 mR 2 , 2 2 mR 2 , 5 стержня длиной l, если ось вращения перпендикулярна стержню и проходит через его середину I0 1 2 ml . 12 Момент инерции тела относительно произвольной оси (теорема Штейнера): I I0 md2 , где I 0 – момент инерции тела относительно оси, проходящей через центр масс, d – расстояние между осями. Момент силы (модуль): M Fl , где l – плечо силы. Основное уравнение динамики вращательного движения: ⃗⃗⃗ = 𝐼𝜀⃗ , 𝑀 ⃗⃗⃗– результирующий момент сил. где 𝜀⃗– угловое ускорение, 𝑀 Момент импульса: материальной точки относительно неподвижной точки L mvr , где r – плечо импульса, твердого тела относительно неподвижной оси вращения Закон сохранения момента импульса: L I . ⃗⃗⃗⃗⃗ 𝐿1 = ⃗⃗⃗⃗⃗ 𝐿2 , где ⃗⃗⃗⃗⃗ 𝐿1 – момент импульса системы в начальном состоянии, ⃗⃗⃗⃗⃗ 𝐿2 – момент импульса системы в конечном состоянии. Кинетическая энергия вращательного движения: I2 Wк . 2 Работа при вращательном движении A M , где – изменение угла поворота.