СЕВЕРО-КАВКАЗСКИЙ СОЦИАЛЬНЫЙ ИНСТИТУТ
Ватага А.И.
Бондарева Г.А.
СИСТЕМЫ ПОДДЕРЖКИ ПРИНЯТИЯ
РЕШЕНИЙ
Ставрополь
2023
УДК 004.032.6 (075.8)
ББК 32.973 я73
В 21
В 21 Ватага, Системы поддержки принятия решений: учеб. пособие
/А.И. Ватага, Г.А. Бондарева – Ставрополь: АНО ВО СКСИ, 2023 - 145 с.
В учебном пособии представлены: общие положения о системах
поддержки принятия решений: цели, задачи, классификация, эволюция роли
ЭВМ в системах подготовки принятия решений, типовая структура решения
проблем для принятия решения; структура известных систем поддержки
принятия решений; математическое моделирование в методах принятия
решений; математические модели СППР в условиях определенности
исходных данных, однокритериальные и многокритериальные задачи
оптимизации при поиске искомого решения; математические модели СППР в
условиях неопределённости, риска и конфликтных ситуаций, методы
принятия решений при стохастической (вероятностной) неопределенности,
теория игр и игровое моделирование: антагонистические игры и игры с
«природой»;
применение
критерия
достаточности
в
задачах
однокритериальной и многокритериальной оптимизации.
Учебное пособие имеет практико-ориентированную направленность:
наряду с описанием содержания каждого метода, приводится решение
примера в формате задачи по поиску решения, согласно рассматриваемого
метода; подготовлены задачи для решения их студентами на практических
занятиях. Для основной части решаемых задач в качестве математических
моделей СППР необходимо применение ПО MS Excel, возможно применение
других приложений на ПЭВМ.
Для студентов, обучающихся по направлениям подготовки
«Информационные системы и технологии» и « Прикладная информатика».
– ISBN – 978-5-6050929-5-7
© Ватага А.И., Бондарева Г.А.
© Северо-Кавказский
социальный институт
2
Содержание
ВВЕДЕНИЕ .............................................................................................................. 5
Раздел 1. ОБЩИЕ ПОЛОЖЕНИЯ О СИСТЕМАХ ПОДДЕРЖКИ
ПРИНЯТИЯ РЕШЕНИЙ ........................................................................................ 6
1.1. Понятия и место систем поддержки принятия решений в теории принятия
решений................................................................................................................. 6
1.2. Задачи систем поддержки принятия решений ........................................ 11
1.3. Структура процесса решения проблемы ................................................. 13
1.4. Системы поддержки принятия решений в общей классификации
информационных технологий .......................................................................... 16
1.5. Классификация систем поддержки принятия решений ......................... 18
1.6. Эволюция роли ЭВМ в системах подготовки принятия решений ........ 25
Раздел 2. Структура систем поддержки принятия решений и методы в них
реализуемые ........................................................................................................... 30
2.1. Варианты обобщенных структур СППР .................................................. 30
2.2. Моделирование как методы принятия управленческих решений в
СППР .................................................................................................................. 32
2.3. Математические модели СППР в условиях определённости исходных
данных ................................................................................................................ 37
2.3.1. Экономико-математическая модель однокритериальной задачи
линейного программирования ..................................................................... 37
2.3.2. Математические модели в многокритериальных задачах
оптимизации искомого решения ................................................................. 59
2.3.3. Методы решения многокритериальных задач принятия решений
используемые в СППР в условиях определенности исходных данных .. 61
2.4. Математические модели СППР в условиях неопределенности, риска и
конфликтных ситуаций ..................................................................................... 77
2.4.1. Особенности принятия решений в условиях неопределенности
исходных данных .......................................................................................... 77
2.4.2. Методы принятия решений при стохастической (вероятностной)
неопределенности ......................................................................................... 79
2.4.3.Теория игр и игровое моделирование ................................................ 85
3
2.5. Применение критерия достаточности в задачах однокритериальной
оптимизации. Методы поиска экстремумов унимодальных функций ...... 121
2.5.1. Нахождение экстремума унимодальных функций методами
исключения интервалов неопределенности ............................................. 121
2.5.2. Применение критерия достаточности в задачах поиска экстремума
функции произвольной размерности ........................................................ 135
4
ВВЕДЕНИЕ
В современных условиях резко повысилась цена, которую приходится
платить обществу за недостаточно обоснованные экономические или
социальные решения. Одновременно увеличилась и мера ответственности
руководителей, принимающих решение. Как никогда ранее, усилилась
взаимная зависимость всех лиц, участвующих в подготовке и принятии
решения. Каждый руководитель, или просто лицо принимающее решение
(ЛПР), решая конкретные вопросы на своем уровне управления, должен
увязывать интересы разных сторон, учитывать сложившиеся связи и
последствия их нарушения. Возрастающие требования к качеству
принимаемых решений в разных сферах человеческой деятельности диктуют
необходимость выполнения специальной аналитической работы при
формировании и принятии решения. Для подготовки вариантов решения, как
правило, привлекаются специалисты-эксперты, консультанты, системные
аналитики, системные инженеры и программисты, а в сложных и уникальных
ситуациях выбора оптимального решения из ряда возможных, их участие
обязательно.
Основная задача, перечисленных выше специалистов состоит в
разработке альтернативных вариантов решения, выявлении достоинств и
недостатков каждого из них, оценке последствий выбора того или иного
варианта решения. Специалисты должны обладать знаниями о
существующих методах и системах поддержки принятия решений (СППР), в
которых реализуются эти методы, а также умением применять практически
инструментарий СППР на практике.
Сегодня ЛПР как субъекту сложной системы часто при принятии решений
приходится оценивать ожидаемый результат от принятого решения через ряд
критериев и показателей их характеризующих, которые сами по себе могут быть
противоречивы по своей сути. В этих условиях формализация методов принятия
решений, их оценка и согласование является чрезвычайно важной и сложной
задачей. Увеличение объема информации, необходимость учета большого числа
взаимосвязанных факторов, а часто и быстро меняющаяся обстановка при
принятии решений, требуют использования современной вычислительной
техники в процессе подготовки и принятия решений.
Таким образом, современный руководитель (ЛПР) должен принимать
решение не интуитивно, а используя соответствующий инструментарий СППР
для разработки единственного оптимального решения или поиска лучшего
варианта решения из подготовленного перечня альтернативных, возможных
решений той или иной проблемы или поставленной перед ним задачи.
5
Раздел 1. ОБЩИЕ ПОЛОЖЕНИЯ О СИСТЕМАХ ПОДДЕРЖКИ
ПРИНЯТИЯ РЕШЕНИЙ
1.1. Понятия и место систем поддержки принятия решений в теории
принятия решений
Основные закономерности анализа и синтеза сложных систем, определяет
общая теория систем – общенаучная и логико-методологическая концепция
исследований объектов, представляющих собой системы. Общая теория систем
тесно связана с системным подходом и является конкретизацией и логикометодологическим выражением его принципов и методов.
Основной задачей общей теории систем является унификация отдельных
областей научного знания при помощи выяснения того, каким образом
закономерности, установленные в ограниченных областях, могут быть поняты
как частные случаи более общих закономерностей.
Системный подход – подход, при котором любая система (объект)
рассматривается как совокупность взаимосвязанных элементов (компонентов),
имеющая выход (цель), вход (ресурсы), связь с внешней средой и обратную связь.
Сложные системы (состоящие из подсистем и элементов), в рамках
которых принимаются решения ЛПР по решению той или иной проблемы
(задачи), обязательно должны быть управляемыми с помощью систем
управления. Закономерности построения и функционирования систем управления
трактует теория управления.
Управленческое решение – директивный выбор целенаправленного
воздействия на объект управления, который базируется на анализе ситуации
и содержит программу достижения цели.
Управленческое решение – это определенный процесс, совершаемый в
рамках управления организацией, имеющий три этапа – подготовки,
принятия и реализации управленческих решений, которые включают в себя,
помимо выявления проблемы, формулирования заданий, сопоставления
альтернативных вариантов решения, еще и составление плана реализации
решения и оперативное руководство реализацией решений.
Управленческое решение принимается руководителем в пределах
предоставленных ему прав, норм действующего законодательства и указаний
вышестоящих органов управления.
Отличительные особенности управленческих решений заключаются в
том, что они имеют следующие характеристики: цели, последствия,
разделение труда и профессионализм.
Проблема – это несоответствие фактических или прогнозируемых
значений параметров управляемой системы целям управления. К
возникновению проблемной ситуации могут привести три причины:
− отклонение фактических параметров от целевых;
6
− возможности такого отклонения в будущем, в случае неприятия
каких- либо превентивных мер;
− изменение целей управления.
Существуют различные типы проблем. Наиболее подходящей для
наших целей является классификация, предложенная Г. Саймоном [1],
согласно которой все проблемы подразделяются на три класса (таблица 3).
Таблица 1 – Классификация типов проблем
Проблемы синтеза решений задач выбора лучшей альтернативы из
множества решает теория принятия решений – область исследования,
вовлекающая понятия и методы математики, статистики, экономики,
менеджмента и психологии с целью изучения закономерностей выбора людьми
путей решения разного рода задач, а также способов поиска наиболее выгодных
из возможных решений.
Принимается решение управляющим органом, а реализуется –
исполнительным. Система, средствами которой формируется и реализуется
решение, может быть организационной, технической либо смешанной
(комбинированной). Одним из важнейших атрибутов сложной системы является
наличие целенаправленного поведения. Чем сложнее система, тем сложнее её
взаимодействие с внешней средой, а значит больше существует различных вариантов движения к цели.
Принятие решения — это процесс рационального или иррационального
выбора альтернатив, имеющий целью достижение осознаваемого результата.
Задача принятия решений (ЗПР) - одна из самых распространенных и
сложных в любой предметной области. Её решение сводится к выбору, как
правило, лучшего решения из набора существующих альтернатив. Для того
чтобы сделать такой выбор, необходимо четко определить цель, критерии и
показатели, по которым будет проводиться оценка некоторого набора
альтернативных вариантов принятия решения. Выбор метода решения ЗПР
зависит от количества и качества доступной информации. Данные,
необходимые для осуществления обоснованного выбора, можно разделить на
четыре категории:
− информация об альтернативных вариантах;
− информация о критериях и показателях выбора;
7
− информация о предпочтениях, исходя из целеполагания при
принятии решения;
− информация о внешних факторах, влияющих на ЗПР.
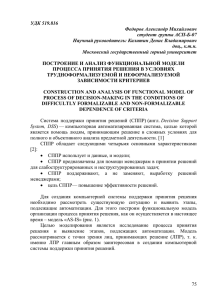
Общую схему процесса принятия решений можно представить, как
показано на рисунке 1.
Рисунок 1. – Схема принятия решений.
В своём историческом развитии теория принятия решений (ТПР)
прошла через три стадии [1].
1. На первой стадии развивался дескриптивный подход к принятию
решений. Здесь усилия ученых были направлены на описание процесса
выбора решений человеком в целях определения рационального зерна,
характерного для всякого разумного выбора. В результате проведенных
исследований оказалось, что большинство людей действуют интуитивно,
проявляя при этом непоследовательность и противоречивость в своих
суждениях.
Положительным
аспектом
исследований
в
области
дескриптивного подхода явилось то, что удалось дать достаточно четкий
ответ на вопрос, что может и чего не может человек, решая задачу выбора.
2. На второй стадии исследователи разрабатывали нормативный подход
8
к принятию решений. Однако и здесь их постигла неудача, поскольку
идеализированные теории, рассчитанные на сверхрационального человека с
мощным интеллектом, не нашли практического применения.
3. На третьей стадии был развит прескриптивный подход к принятию
решений. Он оказался наиболее плодотворным, поскольку предписывал, как
должен поступать человек с нормальным интеллектом, желающий
напряженно и систематизированно обдумывать все аспекты своей задачи.
Прескриптивный подход не гарантирует нахождения оптимального решения
в любой ситуации, но обеспечивает выбор такого решения, которое не
обременено противоречиями и непоследовательностями. Данный подход
предъявляет к человеку серьезные требования по освоению методов и
приемов теории принятия решений, а также предписывает проведение
многочисленных вычислений, связанных с реализацией этих методов.
Аксиомой управления в теории принятия решений является всегда
имеющаяся возможность неудачного исхода операции – вне зависимости от
уровня квалификации и искусства ЛПР.
Имеется достаточно много причин подобной реальности управления –
как объективных, так и субъективных. Одними из наиболее веских
объективных причин неудач в управленческой деятельности следует считать
неопределенность среды управления и неполноту информированности ЛПР
или менеджеров об условиях проведения операции (то, что называется
неопределенным механизмом ситуации).
ЛПР и менеджеры всегда принимают управленческие решения,
основываясь только на доступной им в данный момент информации о
политических, экономических, финансовых, социальных, правовых и других
обстоятельствах. Однако совершенно ясно, что информация о ситуации и
сама ситуация - далеко не одно и то же; информация о ситуации – это
упрощенный образ, модель ситуации. Как и всякая модель, информация о
ситуации, конечно же, обладает ограниченной полнотой, точностью и
своевременностью сведений и данных. Причин здесь много: от нехватки
времени на сбор данных до сознательного искажения информации.
Помимо ЛПР, его менеджеров и рядовых исполнителей в финансовоэкономическую деятельность фирмы всегда вовлечено большое количество
других субъектов: представителей правительственных кругов и СМИ,
партнеров и субподрядчиков по финансово-экономическому проекту,
конкурентов, обывателей. Даже если эти субъекты и не настроены враждебно
по отношению к ЛПР, они все равно воспринимают ситуацию по-своему.
Применительно к конкретным условиям компаньоны и подрядчики имеют не
иллюзорную, а конкретную в каждый момент времени производительность
труда и по-разному склонны относиться к итогам труда. Все это искажает
представления ЛПР о степени благоприятности текущей ситуации,
побуждает его предпринимать не всегда верные решения. Тем более это
справедливо в контексте степени информированности ЛПР о возможных
планах, намерениях и возможных действиях его конкурентов.
9
Таким образом, следует проявлять осторожность при принятии
управленческих решений на основе имеющейся информации о сложившейся
ситуации.
Основное правило ТПР или аксиома управления может быть
сформулировано следующим образом:
ЛПР всегда должно действовать, помня, что только решения и
планы бывают идеальными, а люди и обстоятельства всегда реальны, и
поэтому любое управленческое решение, любой план несет в себе
возможность не только успеха, но и неудачи.
Естественно, решения принимаются ЛПР для достижения конкретных
целей в ходе устранения проблем. Сами эти цели намечаются ЛПР как
некоторые желаемые результаты, которые необходимо получить в ходе
планируемых работ (плана действий). А раз так, то целесообразно
эффективность решения оценивать степенью полезного эффекта, который
ЛПР получает в результате реализации своего решения. Очевидно, что если
цель выбрана верно (если она адекватна проблеме), а полученные в ходе
операции результаты не хуже тех, которые были намечены в качестве цели,
значит, решение было удачным, то есть – эффективным.
Таким образом, эффективность решения оценивается степенью его
полезности, пользы для ЛПР в смысле устранения стоящих перед ним
экономических, финансовых, личных или других проблем.
Эффективность решения– это субъективная оценка ЛПР полезности
рассматриваемого решения в целях устранения стоящей перед ним
проблемы.
Для ЛПР желательно также подкрепить свои выводы о
предпочтительности
выбора
варианта
решения
какими-нибудь
количественными сопоставлениями и сравнениями, в связи с чем ЛПР
применяет,
как
правило,
математические
методы
анализа
предпочтительности вариантов решения.
Часто при выборе альтернатив в процессе принятия решения,
приходится учитывать большое число противоречивых требований и,
следовательно, оценивать варианты решений по многим критериям.
Противоречивость требований, неоднозначность оценки ситуаций, ошибки в
выборе приоритетов сильно осложняют принятие решений. В связи с этим
появился новый класс вычислительных систем – системы поддержки
принятия решений (СППР).
Термин «система поддержки принятия решений» появился ещё в
начале семидесятых годов XX столетия. За это время дано много
определений СППР, как системы характеризующей функции СППР в
процессе принятия решения человеком.
Система поддержки принятия решений является человекомашинным объектом, который позволяет лицу принимающему решение
(ЛПР), использовать данные, знания, объективные и субъективные модели
для анализа и решения слабоструктурированных и неструктурированных
10
проблем [3].
В этом определении подчеркивается предназначение СППР для
решения слабоструктурированных и неструктурированных задач. К
слабоструктурированным относятся задачи, которые содержат как
количественные, так и качественные оценки проблемы, причем качественные
имеют тенденцию доминировать.
Система поддержки принятия решений − комплекс математических
и эвристических методов и моделей, объединенных общей методикой
формирования альтернатив управленческих решений в организационных
системах, определения последствий реализации каждой альтернативы и
обоснования выбора наиболее приемлемого управленческого решения.
В этом определении СППР акцент делается на формировании ЛПР
возможных альтернативных управленческих решений в организационных
системах и ожидаемых последствий от реализации наиболее приемлемого
решения.
К материалу, изложенному в настоящем учебном пособии, а также
исходя из направлений подготовки студентов, для которых предназначено
учебное пособие, наиболее подходящим будет определение СППР
приведенное ниже.
Системы поддержки принятия решений (СППР) – компьютерные
автоматизированные системы, целью которых является помощь ЛПР в
сложных условиях, для полного и объективного анализа предметной
деятельности [3]. Такие СППР возникли в результате слияния
управленческих информационных систем и систем управления базами
данных вычислительных систем для подготовки предложений ЛПР на
принятие решений в профессиональной сфере деятельности.
1.2. Задачи систем поддержки принятия решений
Задачи, решаемые с помощью систем поддержки принятия решений,
подразделяются:
1) на задачи, для которых характерным является возможность
объективной оценки результата решения с получением одного оптимального
результата или с получением двух и более решений, выбор из которых
проводится путём их сравнительной оценки;
2) на задачи, для которых объективная оценка результатов решения
отсутствует, и её заменяют экспертные оценки специалистов в
соответствующей сфере деятельности.
Примерами задач второго типа являются принятие экономических и
политических
решений,
большинство
задач
предварительного
проектирования (хотя там есть расчеты, но лишь ориентировочные), задачи
медицинской диагностики, во многих случаях принятие решений в
чрезвычайных ситуациях и т.д. Для этих задач характерна субъективная
оценка человеком качества решения и решающее влияние опыта, знаний и
11
личных интересов руководителя на выработку решения. Более того, чем
больше степень неопределенности, тем большее значение в процессе
принятия решения имеет субъективная оценка руководителя.
Примеры задач, решаемых с привлечением СППР:
1) Параметрический анализ – оценка поведения выходных величин при
изменении значений исходных переменных;
2) Анализ
чувствительности
–
исследование
поведения
результирующих переменных в зависимости от изменения значения одной
или нескольких входных переменных;
3) Анализ возможностей – нахождение значений входной переменной,
которые обеспечивают желаемый конечный результат (известен также под
названием «поиск целевых решений», «анализ значений целей», «управление
по целям»);
4) Анализ влияния – выявление для выбранной результирующей
переменной всех входных переменных, влияющих на ее значение, и оценка
величины изменения результирующей переменной при заданном изменении
входной переменной (например на 1%);
5) Анализ данных – прямой ввод в модель раннее известных данных и
манипулирование при прогнозировании;
6) Сравнение и агрегирование – сравнение результатов двух или более
прогнозов, сделанных при различных входных предположениях, или
сравнение предсказанных результатов с действительными, или объединение
результатов, полученных при различных прогнозах или для разных моделей;
7) Анализ риска – оценка исполнения выходных переменных при
случайных изменениях входных величин;
8) Оптимизация – поиск значений управляемых входных переменных,
обеспечивающих
наилучшее
значение
одной
или
нескольких
результирующих переменных.
Возможные трудности у ЛПР при использовании систем
поддержки принятия решений и возможности их преодоления:
1) Психологический барьер. Использование вычислительной техники
для генерации, оценки, согласования и принятия решений все еще
наталкивается на определенное недоверие со стороны ЛПР. Однако
расширение практики получения положительных результатов применения
моделей СППР, а также возможностей современных ЭВМ, сокращение
ошибок по причине человеческого фактора, и главное – экономия времени
принятия решения, практически нивелировали этот барьер.
2) Необходимость сохранения конфиденциальности предпочтений
и мотивов действий руководителя. Эта проблема может стать серьезным
препятствием использования СППР. Далеко не все руководители (ЛПР)
делятся даже с ближайшими сотрудниками своими планами, тем более
стратегическими, оценками складывающейся ситуации. В сложных
ситуациях руководитель может не иметь такой свободы выбора решения, и
ему бывает трудно отвергнуть вариант решения, предлагаемый его
12
помощниками путём решения проблемы с помощью СППР на ЭВМ, не
раскрывая им своих истинных мотивов. Однако эта проблема не является
непреодолимой – в СППР могут быть предусмотрены средства кодирования
истинных предпочтений руководителя, недоступные для других
пользователей СППР на ЭВМ, однако это может усложнить модель процесса
поиска правильного решения.
3) Противоречие, возникающее от смешения ответственности
математика-программиста
и
руководителя.
Необходимость
использования математических моделей порождает противоречие, которое
возникает при взаимодействии руководителя (ЛПР) с компьютерной
системой поддержки принятия, на которой ЛПР лично не работает. Это
противоречие возникает от смешения ответственности, так как инженерпрограммист, компетентный в своей сфере, несет профессиональную
ответственность только за качество решений математически поставленной
задачи. Он не компетентен в содержательной стороне процедур принятия
проектных решений и не отвечает за них. Тем не менее, через разработанные
им модели и алгоритмы решение формирует он. Руководитель,
компетентный в содержательных вопросах и отвечающий за конечный
результат, в большинстве случаев не в состоянии понять математические
метода, и поэтому для него процесс формирования решения не вполне
прозрачен. Таким образом, получается, что отвечает за последствия решений
руководитель, а формирует решение инженер-программист. Это
противоречие вызывает недоверие у руководителя, и является одной из
причин нежелания руководителя работать с компьютерными системами
поддержки принятия решений. Однако, с течением времени, с одной стороны
пользовательский интерфейс современных СППР на ПК становится всё более
"прозрачным" (понятным) для ЛПР, с другой стороны растёт и уровень
компьютерной подготовки ЛПР, часто самостоятельно выполняющих
действия в СППР на ЭВМ.
1.3. Структура процесса решения проблемы
В настоящее время, в связи с ещё более возросшими возможностями
современных ЭВМ на основе искусственного интеллекта, имеется
возможность обеспечивать аппаратно-программную поддержку процесса
решения проблемы на всех его фазах.
Основными фазами процесса решения проблемы являются [3]:
1) Подготовка решения проблемы;
2) Принятие решения проблемы;
3) Реализация решения проблемы.
Фаза подготовки решения в свою очередь включает 3 этапа:
Этап 1. Предварительный анализ проблемы, который включает:
− проводится экономический анализ проблемной ситуации; проблема,
требующая решения обнаруживается, структурируется и оценивается;
13
оцениваются: масштаб и серьезность проблемы, источники проблемы и
причины ее появления;
− вырабатывается цель и задачи принятия решений на устранение
проблемы;
− уровни рассмотрения проблемы, элементы и структура системы
(процесса), типы связей между структурными элементами системы
(процесса);
− подсистемы, используемые ими основные ресурсы и критерии
качества функционирования подсистем;
− основные противоречия, узкие места и ограничения.
Этап 2. Постановка задачи принятия решения (ЗПР) включает:
− формулирование задачи;
− определение типа задачи;
− определение множества альтернативных вариантов и основных
критериев для выбора из них наилучших;
− выбор метода решения ЗПР.
Этап 3. Получение исходных данных включает:
− сбор количественных (статистических) исходных данных;
− возможное использование при этом методов математического или
имитационного моделирования;
− выбор исходных данных для измерения и оценки альтернативных
решений проблемы;
− возможное использование методов экспертной оценки. В последнем
случае необходимо решить задачи формирования группы экспертов,
проведения экспертных опросов, предварительного анализа экспертных
оценок.
Фаза процесса принятия решения включает 2 этапа:
Этап 4. Решение ЗПР с привлечением математических методов и
вычислительной техники, экспертов и лица, принимающего решение.
На этом этапе производятся математическая обработка исходной
информации, ее уточнение и модификация в случае необходимости.
Обработка информации может оказаться достаточно трудоемкой, при этом
может возникнуть необходимость совершения нескольких итераций и
желание применить различные методы для решения задачи. Поэтому именно
на этом этапе возникает потребность в компьютерной поддержке процесса
принятия решений, которая выполняется с помощью автоматизированных
систем принятия решений.
Этап 5. Анализ и интерпретация полученных результатов.
Полученные результаты могут оказаться неудовлетворительными и
потребовать изменений в постановке ЗПР. В этом случае необходимо будет
возвратиться на этап 2 или этап 1 и пройти заново весь путь. Решение ЗПР
может занимать достаточно длительный промежуток времени, в течение
которого окружение задачи может измениться и потребовать корректировок
в постановке задачи, а также в исходных данных (например, могут появиться
14
новые альтернативы, требующие введения новых критериев). Задачи
принятия решений можно разделить на статические и динамические. К
первым относятся задачи, которые не требуют многократного решения через
короткие интервалы времени. К динамическим относятся ЗПР, которые
возникают достаточно часто. Следовательно, итерационный характер
процесса принятия решений можно считать закономерным, что подтверждает
необходимость создания и использования эффективных систем
компьютерной поддержки. ЗПР, требующие одного цикла, можно скорее
считать исключением, чем правилом;
Строится окончательный набор альтернатив;
Выбираются и обосновываются критерии выбора оптимального
решения и им соответствующие показатели, характеризующие эти критерии
выбора;
Альтернативы оцениваются и ранжируются по каждому из критериев, в
зависимости от результатов при расчёте соответствующих им показателей;
Выбирается лучшая альтернатива.
Фаза реализации решения включает 3 этапа:
Этап 6. Составляется план реализации решения (на основе
результатов ЗПР), который включает:
− определение последовательности действий по решению проблемы с
привязкой по времени;
− назначение ответственных лиц;
− доведение задач до исполнителей (ответственных лиц);
Этап 7. Составляется план контроля за ходом исполнения принятого
решения, который включает:
− осуществляется контроль за ходом исполнения принятого решения
исполнителями (ответственными лицами);
− оценивается (желательно пооперационно) выполнение поставленных
задач исполнителями (ответственными лицами);
− устанавливается обратная связь с исполнителями (ответственными
лицами) при выполнении задач последними;
− при необходимости в принятое решение могут быть внесены
необходимые коррективы, если практические результаты неприемлемо
отличаются от результатов ЗПР.
Естественно, после того как решение уже принято и реализовано,
представление ЛПР об эффективности этого решения может измениться
(стать иным). Это обусловлено тем, что только после реализации решения,
после того, как выяснится, что было сделано правильно, а что - неверно,
становится ясно, действительно ли актуальная проблема решена или же
своим решением ЛПР только усугубило исходную проблему, породило
новые трудности.
Таким образом, правильнее говорить о двух оценках эффективности
решения: о теоретической (априорной) эффективности решения, на основе
которой делается обоснованный выбор наилучшей альтернативы для
15
реализации, и о фактической (апостериорной) эффективности решения.
Этап 8. Утверждение результатов реализации решения проблемы,
включает документальное оформление результатов решения проблемы.
1.4. Системы поддержки принятия решений в общей классификации
информационных технологий
Особенностью СППР является метод организации взаимодействия
человека и компьютера, согласно которого выработка решения является
основной целью и происходит в результате итерационного процесса (рис.2), в
котором участвуют:
− система поддержки принятия решений в роли вычислительного звена
и объекта управления;
− человек (ЛПР) как управляющее звено, задающее входные данные и
оценивающее полученный результат вычислений на компьютере.
Рисунок 2. – Итерационный процесс выработки решения.
Окончание итерационного процесса происходит по воле человека.
Отличительными чертами СППР при этом являются следующие:
− ориентация на решение как хорошо, так и плохо структурированных
(формализованных) задач;
− выявление и ранжирование приоритетов, учет неопределенности в
оценках ЛПР и формирование его предпочтений;
− сочетание различных методов получения и обработки компьютерных
данных в составе математических моделей;
− анализ возможных последствий принимаемых решений;
− направленность на пользователя компьютером, владеющего
основами работы с пакетами прикладных программ (ППП) СППР и анализа
получаемых данных;
− высокая адаптивность СППР, обеспечивающая возможность
приспосабливаться к особенностям имеющегося технического и
программного обеспечения ЭВМ, а также к требованиям ЛПР при принятии
решения с использованием автоматизированной СППР.
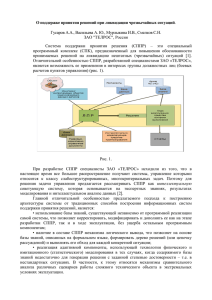
Исходя из целей, особенностей выработки решений с помощью СППР,
16
присущими им отличительными чертами, место СППР в общей
классификации информационных технологий принято определять, как
показано на рисунке3, где в качестве информационных технологий
охватывающих задачи управления выделены две информационные
технологии предназначенные для поддержки ЛПР при принятии им решений,
это поддержка принятия решений в общем смысле этого слова и экспертная
поддержка. Что объединяет и в чём разница между этими понятиями,
используемыми при рассмотрении современных СППР?
Объединяет их одна цель – оба они призваны обеспечить высокий
уровень поддержки принятия решений ЛПР с использованием
автоматизированных информационных систем (АИС). Однако имеются и три
существенных различия.
Первое и основное отличие связано с тем, что экспертная поддержка
как информационная технология в составе экспертных систем позволяет
пользователю автоматизированного рабочего места (АРМ-пользователю в
дальнейшем, или просто пользователю) принять решение, превосходящее его
возможности; поддержка принятия решений просто как таковая (без
использования знаний экспертов) отражает уровень понимания и осмысления
получаемого решения только с точки зрения пользователя (ЛПР).
Рисунок 3. – Место СППР в общей классификации информационных
технологий.
Второе отличие указанных технологий выражается в способности
экспертных систем пояснять свои рассуждения в процессе получения
решения более глубоко, чем это сделает просто пользователь (ЛПР). Очень
часто эти пояснения оказываются более важными для пользователя, чем само
решение.
Третье отличие связано с использованием в экспертных современных
системах, такого компонента информационных технологий как база знаний.
17
Далее в учебном пособии, авторами при рассмотрении известных
СППР будут иметь место СППР как с использованием экспертных систем
(ЭС), так и без них.
1.5. Классификация систем поддержки принятия решений
Классификация современных СППР может быть представлена очень
широко, по различным признакам, наиболее полно её можно представить как
показано на рисунке 4[3].
Классификация на уровне пользователя
На уровне пользователя СППР делится на: пассивную, активную и
кооперативную.
Пассивной СППР называется система, которая помогает ЛПР в
принятии решения, но не может однозначно указать, какое решение принять.
Активная СППР может указать, какое решение следует выбрать.
Рисунок 4. – Классификация систем поддержки принятия решений.
Кооперативная СППР позволяет ЛПР изменять, пополнять данные и
улучшать решения, предлагаемые системой, посылая затем эти изменения в
систему для проверки, а затем опять отправлять пользователю.
Классификация СППР по архитектуре
На сегодняшний день можно выделить четыре наиболее популярных
типа архитектур СППР:
18
Функциональная СППР является наиболее простой с архитектурной
точки зрения. Такие системы часто встречаются на практике, в особенности в
организациях с недостаточно развитой информационной инфраструктурой.
Характерной чертой функциональной СППР является то, что анализ
осуществляется с использованием данных из оперативных систем.
Преимущества: быстрое внедрение за счет отсутствия этапа перегрузки
данных в специализированную систему; минимальные затраты за счет
использования одной платформы.
Недостатки: единственный источник данных, потенциально сужающий
круг вопросов, на которые может ответить система; оперативные системы
характеризуются очень низким качеством данных с точки зрения их роли в
поддержке принятия стратегических решений; большая нагрузка на
оперативную систему, сложные запросы могут привести к остановке работы
оперативной системы, что весьма нежелательно.
СППР с использованием независимые витрины данных встречаются в
крупных организациях с большим количеством независимых подразделений,
зачастую имеющих свои собственные отделы информационных технологий.
Преимущества: витрины данных можно внедрять достаточно быстро;
витрины проектируются для ответов на конкретный ряд вопросов; данные в
витрине оптимизированы для использования определенными группами
пользователей, что облегчает процедуры их наполнения, а также
способствует повышению производительности.
Недостатки: данные хранятся многократно в различных витринах
данных, это приводит к дублированию данных и, как следствие, к
увеличению расходов на хранение и к потенциальным проблемам, связанным
с необходимостью поддержания непротиворечивости данных; потенциально
очень сложный процесс наполнения витрин данных при большом количестве
источников данных; данные не консолидируются на уровне предприятия,
таким образом, отсутствует единая картина бизнеса.
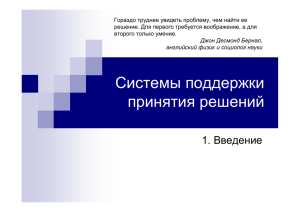
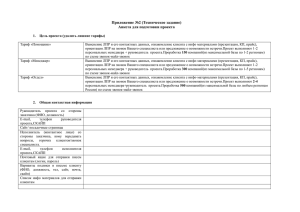
СППР на основе двухуровневого хранилища данных строится
централизованно для предоставления информации в рамках компании. Для
поддержки такой архитектуры необходима выделенная команда
профессионалов в области хранилищ данных. Это означает, что вся
организация должна согласовать все определения и процессы
преобразования данных.
Преимущества: данные хранятся в единственном экземпляре;
минимальные затраты на хранение данных; отсутствуют проблемы,
связанные с синхронизацией нескольких копий данных; данные
консолидируются на уровне предприятия, что позволяет иметь единую
картину бизнеса.
19
Computer
Computer
Computer
Computer
Источник
данных
Рисунок 5. – Двухуровневое хранилище данных.
Недостатки: данные не структурируются для поддержки потребностей
отдельных пользователей или групп пользователей; возможны проблемы с
производительностью системы; возможны трудности с разграничением прав
пользователей на доступ к данным.
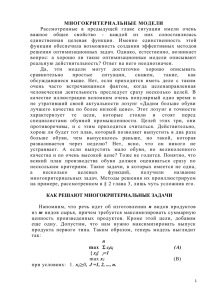
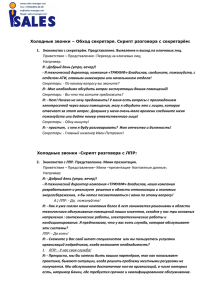
СППР на основе трёхуровневого хранилища данных представляет
собой единый централизованный источник корпоративной информации.
Рисунок 6.– Архитектура СППР с трехуровневым хранилищем данных.
Витрины данных представляют подмножества данных из хранилища,
организованные для решения задач отдельных подразделений компании.
Конечные пользователи имеют возможность доступа к детальным данным
хранилища, в случае если данных в витрине недостаточно, а также для
получения более полной картины состояния бизнеса.
Преимущества: создание и наполнение витрин данных упрощено,
поскольку наполнение происходит из единого стандартизованного
надежного источника очищенных нормализованных данных; витрины
20
данных синхронизированы и совместимы с корпоративным представлением;
имеется корпоративная модель данных; существует возможность
сравнительно лёгкого расширения хранилища и добавления новых витрин
данных.
Недостатки: существует избыточность данных, ведущая к росту
требований на хранение данных; требуется согласованность с принятой
архитектурой многих областей с потенциально различными требованиями
(например, скорость внедрения иногда конкурирует с требованиями
следовать архитектурному подходу).
Классификация на концептуальном уровне
На концептуальном уровне различают СППР, управляемые:
− сообщениями (Communication-Driven DSS);
− данными (Data-Driven DSS);
− документами (Document-Driven DSS);
− знаниями (Knowledge-Driven DSS);
− моделями (Model-Driven DSS).
СППР управляемая сообщениями поддерживает группу пользователей,
работающих над выполнением общей задачи.
СППР управляемые данными или СППР, ориентированные на работу с
данными, в основном ориентируются на доступ и манипуляции с данными.
СППР управляемые документами, управляют, осуществляют поиск и
манипулируют неструктурированной информацией, заданной в различных
форматах.
СППР управляемые знаниями, обеспечивают решение задач в виде
фактов, правил, процедур.
СППР управляемые моделями, характеризуются в основном доступом
и манипуляциями с математическими моделями.
Классификация на техническом уровне
На техническом уровне различают СППР всего предприятия и
настольную СППР.
СППР всего предприятия подключена к большим хранилищам
информации и обслуживает многих менеджеров (ЛПР) предприятия.
Настольная СППР – это малая система, обслуживающая одного
пользователя (ЛПР) за автоматизированным рабочим местом (АРМ).
Классификация СППР по уровням
Системы начального уровня широко распространены среди
предприятий небольшого размера, которые успешно используют их в своей
повседневной деятельности. Отличительной чертой таких информационных
систем является ограниченный охват бизнес-процессов предприятия.
Системы среднего уровня обладают программным продуктом с более
широкими возможностями, нежели системы начального уровня.
В состав таких систем обычно входят следующие подсистемы:
− бухгалтерский учет;
− управление производством;
21
− материально-техническое снабжение и сбыт;
− планирование;
− производство.
Системы высшего уровня обеспечивают планирование и управление
всеми ресурсами организации. Количество различных параметров настроек
достигает десятков тысяч. Однако одновременно возрастает и стоимость
внедрения подобной системы.
Для систем всех трёх уровней характерна необходимость принятия
ЛПР управленческих решений, той или иной степени сложности, при этом
объектами управленческих решений являются, как правило, виды
деятельности организаций, представленные на рисунке 7. Безусловно
сложность принятия управленческого решения ЛПР будет наиболее высокой
для систем высшего уровня и потребует, как правило, на этапе подготовки
принятия решения использование автоматизированных систем управления
(АСУ).
Рисунок 7. – Объекты управленческих решений
Классификация в зависимости от вида данных, с которыми
работают СППР
Оперативные СППР предназначены для немедленного реагирования на
изменения текущей ситуации в управлении финансово-хозяйственными
процессами
компании.
СППР
этого
типа
получили
название
Информационных Систем Руководства (Executive Information Systems, ИСР).
Для ИСР характерны следующие основные черты:
− отчеты, как правило, базируются на стандартных для организации
запросах; число последних относительно невелико;
− ИСР представляет отчеты в максимально удобном виде,
включающем, наряду с таблицами, деловую графику, мультимедийные
возможности и т.п.;
− как правило, ИСР ориентированы на конкретный вертикальный
рынок, например финансы, маркетинг, управление ресурсами.
Стратегические СППР ориентированы на анализ значительных
объемов разнородной информации, поиск наиболее рациональных вариантов
развития бизнеса компании с учетом влияния различных факторов,
22
предполагают глубокую проработку данных. Неотъемлемым компонентом
СППР этого уровня являются правила принятия решений, которые на основе
агрегированных данных дают возможность менеджерам компании
обосновывать свои решения, использовать факторы устойчивого роста
бизнеса компании и снижать риски. Технологии этого типа строятся на
принципах многомерного представления и анализа данных (OLAP).
Классификация по функциональному наполнению интерфейса
системы
В зависимости от функционального наполнения интерфейса системы
выделяют два основных типа СППР: EIS и DSS.
EIS (Execution Information System)– информационные системы
руководства предприятия. Эти системы ориентированы на неподготовленных
пользователей, имеют упрощенный интерфейс, базовый набор предлагаемых
возможностей, фиксированные формы представления информации.
Для EIS характерны следующие основные черты:
− отчеты, как правило, базируются на стандартных для организации
запросах;
− число последних относительно невелико;
− представляет отчеты в максимально удобном виде, включающем,
наряду с таблицами, деловую графику, мультимедийные возможности и т.п.;
− ориентированы на конкретный вертикальный рынок, например
финансы, маркетинг, управление ресурсами.
DSS (Desicion Support System) полнофункциональные системы анализа
и исследования данных, рассчитанные на подготовленных пользователей,
имеющих знания как в части предметной области исследования, так и в части
компьютерной грамотности.
Классификация СППР по уровню распределенности
Сосредоточенные СППР включают в себя одну экспертную систему,
установленную на одной вычислительной машине, помогая одному ЛПР (или
небольшой группе специалистов) оценивать обстановку и принимать
решения.
Распределенные СППР состоят из локальных СППР, расположенных в
связанных между собой узлах вычислительной сети, каждый из которых
может независимо решать свои частные задачи, но для решения общей
проблемы ни одна из них не обладает достаточными знаниями, информацией
и ресурсами (или некоторыми из этих составляющих). Общую проблему они
могут решать только сообща, объединяя свои локальные возможности и
согласовывая принятые частные решения. Функционально распределенные
системы состоят из нескольких экспертных систем (или СППР), связанных
между собой информационно.
Классификация СППР по функциональным возможностям
MRP (Materials Resource Planning (планирование материальных
ресурсов). Основная цель концепции MRP заключалась в минимизации
издержек, связанных со складскими запасами (в том числе и на различных
23
участках производства). В основе этой концепции лежит понятие ВОМ
(BillOf Material - спецификация изделия, ответственность за которую
возложена на конструкторский отдел), отражающее зависимость спроса на
сырье, полуфабрикаты и другие продукты от плана выпуска готовой
продукции.
Недостатком этой системы является то, что при расчете потребности в
материалах, не учитываются загрузка имеющихся производственных
мощностей, стоимость рабочей силы.
Этот недостаток был исправлен в концепции MRPII (Manufacturing
Resource Planning - планирование производственных ресурсов). MRPII
позволяла учитывать и планировать все производственные ресурсы
предприятия (сырье, материалы, оборудование, персонал и т.д.). По мере
развития концепции MRPII к ней постепенно добавлялись возможности учета
остальных затрат предприятия.
Так появилась концепция ERP(Enterprise Resource Planning планирование ресурсов предприятия), называемая иногда также
планированием ресурсов в масштабе предприятия. В основе ERP лежит
принцип создания единого хранилища данных (репозитария), содержащего
всю деловую информацию, накопленную организацией в процессе ведения
бизнеса, в частности финансовую информацию, данные, связанные с
производством, управлением персоналом, и любые другие данные.
Концепция ERP нашла широкое применение, поскольку планирование
ресурсов позволяло сократить время выпуска продукции, снизить уровень
товарно-материальных запасов, а также улучшить обратную связь с
потребителем при одновременном сокращении административного аппарата.
Стандарт ERP позволил объединить все ресурсы предприятия и повысить
эффективность управления ими.
CSRP (Customer Synchronized Resource Planning) вид классификации
СППР по функциональным возможностям, который охватывает
взаимодействие с клиентами, оформление нарядов/заказов и технических
заданий, поддержку заказчика на местах. Таким образом, если стандарты
MRP, MRPII и ERP ориентированы на внутреннюю организацию
предприятия, то стандарт CSRP включает в себя полный цикл от
проектирования будущего изделия, с учетом требований заказчика, до
гарантийного и сервисного обслуживания после продажи. Суть концепции
CSRP главным образом состоит в том, чтобы интегрировать заказчика
(клиента, покупателя) в систему управления предприятием.
По критерию режима анализа данных информационно-аналитические
системы (ИАС) подразделяются на две категории:
− статические (включающие предопределенный набор сценариев
обработки данных и составления отчетов); в эту категорию входят ИСР;
− динамические (поддерживающие построение и выполнение
нерегламентированных запросов и формирование отчетов произвольной
формы).
24
1.6. Эволюция роли ЭВМ в системах подготовки принятия решений
Первоначальным импульсом для применения ЭВМ в процессе
принятия решений явилась необходимость проведения большого объема
вычислений для получения обобщенной оценки путем синтеза всех плюсов и
минусов по каждой альтернативе решения. На этом шаге решением ЗПР
занимались специалисты, имеющие широкие знания как в области методов
принятия решений, так и в программировании на ЭВМ. Этот период в РФ
начался примерно в конце 50-годовXX столетия, с началом серийной
разработки в СССР первых отечественных ЭВМ–БЭСМ-2 (Большая
Электронная Счетная Машина, 1958 года выпуска) [4]. В этот же период, в
рамках модификаций БЭСМ был собран первый советский компьютер
второго поколения — 5Э92б на полупроводниках, под руководством
основателя разработки первых отечественных ЭВМ академика С.А.
Лебедева. Однако после 5Э92б разработчики снова возвратились к БЭСМ с
целью освоить производство универсальных компьютеров на транзисторах.
Появились БЭСМ-3 и БЭСМ-4. Последняя модель была выпущена в
количестве 30 экземпляров. Вычислительная мощность БЭСМ-4 — 40
операций в секунду. Устройство в основном применялось как «лабораторный
образец» для создания новых языков программирования, а также как
прототип для конструирования более усовершенствованных моделей, таких
как БЭСМ-6.За всю историю советской кибернетики и вычислительной
техники БЭСМ-6 считается одной из самых прогрессивных отечественных
ЭВМ. В 1965 году это компьютерное устройство было самым передовым по
управляемости: развитая система самодиагностики, несколько режимов
работы, обширные возможности по управлению удалёнными устройствами,
возможность конвейерной обработки 14 процессорных команд, поддержка
виртуальной памяти, кэш команд, чтение и запись данных. Показатели
вычислительных способностей — до 1 млн. операций в секунду. Выпуск
данной модели продолжался вплоть до 1987 года, а использование — до
1995-го.
Поскольку на практике сочетание знаний специалистов в сфере
программирования и в области принятия решений является редким, то с
течением времени в области отечественного образования, науки и
менеджмента возникла новая категория специалистов – аналитиков в области
принятия решений. Аналитики владели методами принятия решений и
навыками программирования, выступая в роли посредников между лицом,
принимающим решение (ЛПР) и ЭВМ. Аналитик выполнял следующие
функции: уточнял совместно с ЛПР постановку задачи, выбирал метод
принятия
решений,
адекватный
задаче,
собирал
необходимую
статистическую и экспертную информацию, строил модель задачи,
организовывал обработку накопленной информации на ЭВМ, представлял
полученные результаты ЛПР и их интерпретировал. Этот период в РФ
стартовал примерно в конце 80-х годов XX века, однако даже тогда,
существующие инструменты аналитики в области принятия решений не
25
имели широкого распространения, ввиду низкой мощности аналитических
возможностей используемых, в том числе персональных ЭВМ. И только в
конце 90-х годов в РФ бизнес-аналитика получила широкое распространение.
В этот период времени аналитика принятия решений различными методами
связана прежде всего с появлением, в том числе персональных компьютеров,
способных считывать и анализировать получаемую информацию для
последующего предоставления результатов анализа конечному пользователю
(ЛПР).
Следующий шаг в применении ЭВМ для принятия решений был связан
с созданием диалоговых систем «человек – машина»(наибольшее
распространение получил с начала 2000-х годов, в период повсеместного
внедрения персональных ЭВМ с достаточно высокой производительностью и
скоростью работы), позволявших менять интересующие исследователя
параметры заложенной в память ЭВМ модели задачи принятия решений,
выбирать алгоритм поиска решения или его параметров, исследовать
чувствительность полученного решения. Такие системы позволяли получать
более исчерпывающую информацию по результатам решения ЗПР для
всестороннего обоснования выбора оптимального решения из числа
полученных вариантов решения задачи.
В основе диалоговых систем «человек – машина» лежат 7 основных
принципов их организации: совместимость, согласованность, память,
структура, обратная связь, рабочая нагрузка, индивидуализация [5].
Принцип совместимости предполагает минимизацию необходимого
количества взаимосвязанных элементов информации, рассматриваемых как
единое целое. Применительно к проектированию интерфейса "человек—
компьютер" это означает, что он должен быть совместим с возможностями
восприятия человека, его памяти, принятия решений и коммуникации.
Принцип согласованности означает, что ввод информации от
пользователя в ЭВМ, и вывод информации из ЭВМ должны быть
согласованы в рамках всей информационной системы, содержащей
программные модули, дисплеи и другие компоненты. В идеале
согласованность системы должна вытекать из естественных способов решения задачи пользователем, а не из логического формализма или какойлибо модели системы, которые пользователь должен дополнительно изучить.
Принцип согласованности предполагает, что предыдущий опыт работы с
аналогичными вычислительными системами должен облегчить изучение
новых систем.
Принцип памяти означает, что при проектировании диалога "человек
—ЭВМ" важно минимизировать объем информации, который пользователь
должен хранить в своей памяти, особенно в том случае, когда одновременно
существует несколько информационных потоков. В случае, когда требуется
передать пользователю большой объем информации, для уменьшения
нагрузки на его память рекомендуется группировать данные по смыслу.
26
Принцип структуры связан с тем общеизвестным фактом, что человеку
свойственно искать структуру и упорядоченность в окружающем мире даже
в том случае, когда элементы такой организации отсутствуют. Пользователи
ЭВМ всегда пытаются выявить определенную структуру в диалоговых и
управляющих системах. Представление о внутренней организации системы
формирует у пользователя основу понимания им происходящих процессов и
обусловливает его решение и действия. Создание интерфейса с внутренне
согласованной структурой, отвечающей представлениям пользователя,
содействует последнему в его обучении, сокращая до минимума искажения в
его представлении системы.
Принцип обеспечения обратной связи в результате выполнения
действий, инициируемых пользователем в системе «человек – ЭВМ».
Информационное сообщение от ЭВМ, связанное с её реакцией на запрос
пользователя, например: обнаружение ошибок в действиях пользователя,
обнаружение фактов пропуска пользователем необходимых частей вводимых
исходных данных в систему и изменениями состояния системы по этой
причине, всё это должно поступать к пользователю без сколько-нибудь
существенных временных задержек. Обратная связь должна быть корректно
согласована с предпринимаемыми действиями сторон в системе «человек –
ЭВМ» и не прерывать их последовательность. Сообщения об ошибках
должны быть конкретными и сформулированы так, как это сделал бы сам
пользователь, а не излагаться сухим языком, традиционным для
программирования. Пользователь не должен заниматься поиском в справочных материалах с целью интерпретации сообщений системы. Однако
сообщения об ошибках должны отсылать пользователя к специальным
источникам дополнительной информации в тех случаях, когда она не может
быть выведена на экран дисплея.
Принцип
поддержания
оптимальной
рабочей
нагрузки на
пользователя в диалоге "человек – ЭВМ" связан с тем, что вероятность
совершения пользователем ошибки или невыполнения им какого-либо
действия увеличивается в случаях как его перегрузки, так и при недогрузке
(например, неполно поставлены цели и задачи на решение ЗПР; не
определены показатели, которые необходимо рассчитать для принятия
решения ЛПР и другое). При этом, как правило, скорость обработки
информации на ЭВМ и её объем, сложность ЗПР — основные факторы
рабочей нагрузки на пользователя.
Принцип индивидуализации, означающий учет индивидуальных
различий между пользователями посредством автоматической адаптации и
подстройки интерфейса под пользователя. Существуют, по крайней мере, два
возможных подхода к проблеме учета индивидуальных различий: гибкий и
адаптивный интерфейс. Первый позволяет пользователю изменять и
приспосабливать интерфейс соответственно своим потребностям или же
допускает различные варианты взаимодействия. Адаптивные интерфейсы
автоматически приспосабливаются к пользователю и могут изменяться с
27
течением времени. Нередко возникает вопрос: включает ли "дружественное"
пользователю
программное
обеспечение
конкретные
позитивные
характеристики или означает только отсутствие проектных упущений и
недостатков? Теория и практика эргономики и программирования дают
однозначный ответ, что и то, и другое — обязательные условия создания
"дружественного" пользователю программного обеспечения.
В настоящее время, в связи с возросшими возможностями современных
ЭВМ разработаны и широко внедряются, наряду с диалоговыми системами
«человек – машина» и СППР на основе систем искусственного интеллекта,
обеспечивающие высокую предсказуемость и точность вариантов решения
проблемных ситуаций в таких критически важных отраслях экономики РФ
как авиационная, медицинская, станкоинструментальная, химическая
промышленности, нефтегазовое, сельскохозяйственное, железнодорожное,
специализированное машиностроение, автомобилестроение, судостроение,
фармацевтика, электроника, энергетика [6]. СППР на основе искусственного
интеллекта часто называют как системы Decision Support System (DSS), или
"цифровые советники". Направления искусственного интеллекта (ИИ),
которые сейчас на пике популярности, это такие направления как
распознавание образов, в том числе изображений и голосовых записей,
генерация контента и другие. Понятно, что все перечисленные направления
исследований могут иметь непосредственное отношение к СППР, главная
задача которых – анализ данных в сложных условиях и подготовка
рекомендаций ЛПР на основе таких технологий ИИ как:
− нейросети и машинное обучение;
− большие данные и сквозная аналитика, озера и хранилища данных;
− интернет вещей;
− облачные вычисления;
− цифровые двойники;
− системы правил на основе экспертных знаний.
В современных условиях внедрения ЭВМ практически во все сферы
жизнедеятельности общества, выделяют три класса СППР в зависимости от
сложности решаемых задач и областей их применения.
СППР первого класса, обладающие наибольшими функциональными
возможностями, предназначены для применения в органах государственного
управления высшего уровня (органы законодательной и исполнительной
власти РФ всех уровней), в органах управления больших компаний при
планировании крупных комплексных целевых программ для обоснования
решений относительно включения в программу различных политических,
социальных или экономических мероприятий и распределения между ними
ресурсов на основе оценки их влияния на достижение основной цели
программы. СППР этого класса являются системами коллективного
пользования, базы знаний которых формируются многими экспертами–
специалистами в различных областях знаний.
28
СППР второго класса являются системами индивидуального
пользования, базы знаний которых формируются разработчиками
программного обеспечения и самими пользователями. Они предназначены
для использования государственными служащими среднего ранга, а также
руководителями малых и средних фирм для решения оперативных задач
управления.
СППР третьего класса являются системами индивидуального
пользования, адаптирующимися к опыту пользователя (ЛПР) при решении
последним своих профессиональных задач. Они предназначены для решения
часто встречающихся прикладных задач системного анализа и управления
(например, выбор субъекта кредитования, выбор исполнителя работы,
назначение на должность и другие).Такие системы обеспечивают получение
решения текущей задачи на основе информации о результатах практического
использования решений этой же задачи, принятых в прошлом.
В СППР всех трёх классов реализован перехода к расширенной
поддержке принятия решений, в которой используются наряду с
аналитическими методами и многокритериальный анализ. Этот подход более
широко использует нормативный аспект получения эффективного решения,
чем обычные СППР. Одновременно присутствуют процедуры анализа и
объяснения полученного решения и оценки как преимуществ, так и
возможных потерь.
Таким образом, современные ЭВМ, оснащенные СППР на основе
высокотехнологичного
аппаратного
обеспечения
и
программного
обеспечения с элементами искусственного интеллекта, позволяют ЛПР полно
и верно оценить предложенные СППР варианты решения проблем, в том
числе решённые на основе многокритериального их анализа.
В следующей главе учебного пособия, авторами рассматриваются
основные типовые варианты структур и методов, лежащих в основе СППР,
применяемых в качестве программного обеспечения ЭВМ, для подготовки
предложений ЛПР, при разрешении ими проблемных ситуаций в условиях
определённости и неопределённости исходных данных.
29
Раздел 2. Структура систем поддержки принятия решений и методы в
них реализуемые
2.1. Варианты обобщенных структур СППР
Структура СППР зависит от решаемой задачи, предметной области,
аппаратно-программной платформы и конкретной реализации, поэтому
однозначно определить структуру СППР на все случаи её использования в
ЭВМ невозможно.
В самом общем виде СППР можно представить в виде двух подсистем:
подсистемы генерации решений и подсистемы выбора решений (рис. 1).
Рисунок 1. – Обобщенная структура СППР.
Подсистемы генерации решений можно разделить на эвристические и
оптимизационные.
Эвристические технологии стимулируют и дисциплинируют
мышление (например, структурный и морфологический анализ), помогают
находить варианты решений на базе известных правил, принципов и
аналогов. Однако при формировании вариантов решений уникальных задач
(например, при стратегическом планировании) их применимость часто
ограничивают вспомогательными функциями.
Оптимизационные подсистемы генерации решений основаны на
методах оптимального структурного синтеза и параметрической
оптимизации.
Подсистемы выбора решений предназначены для выбора
эффективных
вариантов
решения,
сгенерированных
любым
из
вышеперечисленных методов либо поступивших извне (например, заявок на
финансирование инвестиционных проектов). Эти подсистемы базируются,
как правило на методах многокритериального анализа и экспертных оценок.
Другой вариант обобщенной структуры СППР состоит из пяти частей
(рис. 2):
− источники данных (часто используется база данных);
− система управления данными (если источников несколько,
подсистема объединяет, проверяет и синхронизирует их);
− модели управления (включают в себя модели решаемой задачи и
внешнего мира);
30
− машина вывода (позволяет с помощью имеющихся данных и
моделей получить и обосновать решение) и интерфейс пользователя.
Рисунок 2. – Компоненты структуры СППР.
Удобно представлять СППР в виде процессов в них реализуемых,
типовые из которых представлены на рисунке 3.
Рисунок 3. – Типовые процессы реализуемые в СППР.
Система проводит сбор запрашиваемых у пользователя или внешних
датчиков данных и вложенных в неё при создании данных и знаний.
После этого определяет состояние, в котором находится система и
решаемая задача, критерии и цели (может запрашивать и уточнять у
пользователя).
На основе полученных данных, которые содержатся в памяти, и
имеющейся модели системы или задачи с учетом сформированных критериев
и целей генерируется множество решений, которые проверяются на модели,
и выбирается лучшее.
После реализации решения производится оценка результатов: если она
неудовлетворительная, то процессы генерации и выбора повторяются с
учетом новых данных.
31
Как видно из рисунка 2 в основе структуры СППР реализованной на
ЭВМ лежит та или иная математическая модель управляемой (исследуемой)
системы, которая позволяет на основе выбранных исследователем (ЛПР)
критериев эффективности формировать множество вариантов решений или
формировать единственное оптимальное решение, с учётом собранных и
оцениваемых входных данных, в том числе условий ограничений в рамках
которых принимается решение ЛПР. Используемые математические модели
в качестве методов принятия управленческих решений ЛПР, в рамках
подсистем генерации и выбора решений СППР, рассматриваются в
следующем параграфе пособия.
2.2. Моделирование как методы принятия управленческих решений в
СППР
Методы принятия управленческих решений – собирательное
название методов, связанных с процессами поиска, анализа, оценки, выбора
альтернатив, собственно акта принятия решения, а также организации его
исполнения с целью решения проблем.
Особое место в системе методов принятия управленческих решений
занимает моделирование – метод познания, который заключается в
представлении предметов, систем, процессов и явлений в виде идеальных
абстрактных образов – моделей, и их исследование на основе полученных
моделей.
Таким образом, результатом моделирования является модель–
материальный или идеальный объект, замещающий исследуемую систему и
адекватным образом отображающий ее существенные стороны.
Модель объекта (процесса, явления) отражает его свойства и связи
между ними. Чем больше свойств и связей воплощено в модели, тем ближе
модель к реальному объекту. Учитываемые в модели свойства объекта (из
огромного их числа) называются признаками, или характеристиками. Среди
отражаемых в модели признаков различают переменные и параметры.
Переменные – это признаки, которые могут иметь разные значения и не
влияют на характер модели.
Признаки, которые оказывают наиболее существенное влияние на
поведение моделируемого объекта, называются факторами.
Качественная либо количественная характеристика переменных
осуществляется через показатели.
Взаимосвязь между переменными модели отражается через параметры
– относительно постоянные характеристики модели, изменение которых
ведет к изменению характера самой модели.
Моделирование и модели, применяемые в СППР на ЭВМ для решения
задач управления, можно подразделить на следующие их виды [7]:
1. Математическое моделирование (в приложении к экономическим
объектам – экономико-математическое) применяется в отношении тех
32
объектов и процессов, характеристики и связи в которых могут быть оценены
количественно. Математические модели представляются в виде различного
рода уравнений, соотношений и т. д. и используются в основном на этапе
принятия решений. Этап реализации связан в основном с организационной
работой и трудно формализуем; моделирование в данном случае сводится к
разработке планов реализации решения и контролю за их выполнением. По
способам отражения фактора времени экономико-математические модели
делятся на статические и динамические. В статических моделях все
зависимости относятся к одному моменту или периоду времени.
Динамические модели характеризуют изменения экономических процессов
во времени. Также, математическое моделирование можно разделить на
аналитическое, имитационное, комбинированное.
Аналитическое моделирование – моделирование, которое основано на
косвенном описании моделируемого объекта с помощью набора
математических формул. При этом предполагается использование
математической модели реального объекта в форме алгебраических,
дифференциальных, интегральных, и других уравнений, связывающих
выходные переменные с входными. Наиболее существенно то, что
аналитическая модель не является структурно подобной объекту
моделирования. Под структурным подобием тут понимается однозначное
соответствие элементов и связей модели элементам и связям моделируемого
объекта. К аналитическим моделям относятся модели, построенные на основе
аппарата
математического
программирования,
корреляционного,
регрессионного анализа. Аналитические модели являются эффективным
средством для решения задач оптимизации или вычисления характеристик
различного рода систем, в том числе информационных, производственных и
др., однако в ряде практических задач применение аналитических моделей
затруднительно из-за их большой размерности.
Имитационное моделирование – частный случай математического
моделирования, метод исследования, при котором изучаемая система
заменяется моделью, с достаточной точностью описывающей реальную
систему (построенная модель описывает процессы так, как они проходили бы
в действительности), с которой проводятся эксперименты с целью получения
информации об этой системе. В отличие от предыдущих видов отражает
поведение объектов в динамике, в «реальном масштабе времени». В
имитационных моделях по желанию лица, осуществляющего моделирование,
могут изменяться не только переменные, но и параметры модели. Созданы
многочисленные модели, которые имитируют:
− поведение разнообразных хозяйствующих субъектов в условиях
рынка;
− выполнение отдельных функций управления организацией
(маркетинг, планирование, материально-техническое снабжение, сбыт и др.);
− функционирование отдельных производственных подразделений
предприятия и т. д.
33
Разновидностью имитационного моделирования являются так
называемые «деловые игры», в процессе которых группе лиц предлагается
решить определенную производственную или управленческую проблему
(реальную или искусственно заданную). При этом условия игры заранее
оговариваются.
Комбинированное (аналитико-имитационное) моделирование при
анализе и синтезе систем позволяет объединить достоинства аналитического
и имитационного моделирования.
2. Графическое моделирование – отражение объектов и процессов в
виде графиков, схем, диаграмм и т. д. Широкое распространение получили,
например, сетевые графики, предназначенные для обеспечения согласования
действий большого числа исполнительских звеньев и соблюдения
установленных сроков выполнения работ. В практике управления находят
применение графические средства регламентации управленческой
деятельности – оперограммы, органиграммы, процедурограммы и др.
3. Эвристическое (логическое) моделирование – в его основе лежат
интуитивные и логические способы выработки наилучшего варианта
действий. Данный вид моделирования предполагает использование знаний,
умений и опыта ЛПР. Эвристическое моделирование применяется обычно в
следующих случаях:
− при наличии опыта решения подобных проблем;
− в условиях недостатка информации или времени для решения;
− когда проблема не формализуема, слабо структуризована или ее
решение не может быть представлено в виде четкого алгоритма действий;
− когда применение других, более сложных видов моделирования
экономически не целесообразно.
Основой для логического моделирования служат Булева алгебра и
нечеткая логика. Практически каждая система СППР, построенная на
логическом принципе, представляет собой машину доказательства теорем.
При этом исходные данные хранятся в базе данных в виде аксиом, правила
логического вывода – как отношения между ними. Кроме того, каждая такая
машина имеет блок генерации цели, и система вывода пытается доказать
данную цель как теорему. Если цель доказана, то трассировка примененных
правил позволяет получить цепочку действий, необходимых для реализации
поставленной цели. Мощность такой системы определяется возможностями
генератора целей и машиной доказательства теорем. При использовании
принципов нечеткой логики в логическом подходе кроме да/нет (1/0), имеют
место ещё и промежуточные значения, например – НЕ ЗНАЮ (0,5):
вероятность наступления события скорее ДА, чем НЕТ (0,75), или
вероятность наступления события скорее НЕТ, чем ДА (0,25). Данный
подход больше похож на мышление человека, поскольку он на вопросы
редко отвечает только «да» или «нет». Для большинства логических методов
характерна большая трудоемкость, поскольку во время поиска
доказательства возможен полный перебор вариантов. Поэтому данный
34
подход требует эффективной реализации вычислительного процесса и
хорошая работа обычно гарантируется при сравнительно небольшом размере
базы данных.
4. Моделирование на реальных объектах нередко проводят путём
эксперимента – для проверки вариантов решения проблемы (гипотез),
выработанных другими методами моделирования. Однако часто проведение
эксперимента невозможно либо требует слишком больших экономических
затрат и может привести к нежелательным последствиям. В этом случае
исследуемый объект заменяют компьютерной моделью и исследуют ее
поведение при различных внешних воздействиях. Повсеместное
распространение персональных компьютеров и развитие информационных
технологий сделало компьютерное моделирование одним из результативных
методов изучения систем. Часто компьютерные модели проще и удобнее
исследовать, они позволяют проводить вычислительные эксперименты,
реальная постановка которых затруднена или может дать непредсказуемый
результат. Логичность и формализованность компьютерных моделей
позволяет выявить основные факторы, определяющие свойства изучаемых
объектов, исследовать отклик физической системы на изменения ее
параметров и начальных условий. Компьютерное моделирование требует
абстрагирования от конкретной природы явлений, построения сначала
качественной, а затем и количественной модели. За этим следует проведение
серии вычислительных экспериментов на компьютере, интерпретация
результатов, сопоставление результатов моделирования с поведением
исследуемого объекта, последующее уточнение модели и т.д.
Вычислительный эксперимент фактически является экспериментом над
математической моделью исследуемого объекта, проводимого с помощью
ЭВМ. Часто он значительно дешевле и доступнее натурного эксперимента,
его выполнение требует меньшего времени, он дает более подробную
информацию о величинах, характеризующих состояние системы.
На основе сочетания трех фундаментальных наук математики,
экономики и кибернетики, учеными разработан значительный арсенал
экономико-математических методов математического моделирования,
которые можно объединить под одним названием – методы разработки
оптимальных решений, которые широко используются в СППР, и по праву
могут рассматриваться как самостоятельные направления в науке, с
применением возможностей современных ЭВМ:
− математическое программирование;
− теория управления запасами;
− теория массового обслуживания;
− теория игр;
− теория статистических решений;
− сетевые методы планирования и управления.
Прежде чем приступить к их рассмотрению дадим основополагающие
определения качающиеся математического моделирования в целом.
35
Математическая модель – приближённое описание объекта,
выраженное с помощью математической символики.
Математические модели могут быть функциональными, если они
отображают физические или информационные процессы, протекающие в
моделируемом объекте, и структурными, если они отображают только
структурные
(например,
геометрические
свойства
объектов.
Функциональные модели чаще всего представляют собой системы
уравнений, а структурные модели — это графы, матрицы.
В математической модели объектов проектирования обычно выделяют
свойства систем, элементов систем и внешней среды, в которой должен
действовать объект. Количественные представления этих свойств
называют параметрами, т.е. фигурирующие в математической модели
объектов проектирования величины называют параметрами. Параметр – это
величина, характеризующая свойства или режим его функционирования
Различают выходные параметры как величины, характеризующие
свойства системы, внешние параметры как величины, характеризующие
свойства внешней среды, внутренние параметры как величины,
характеризующие свойства элементов системы.
Параметры элементов объекта называют внутренними параметрами,
величины. Следовательно, внутренние параметры характеризуют свойства
элементов проектируемого объекта (проектные параметры).
Те внутренние параметры, которые являются независимыми друг от
друга и могут изменяться в некоторых пределах, называются управляемыми
параметрами (независимыми).
Параметры, характеризующие свойства объекта, называют выходными
параметрами.
Параметры, характеризующие свойства внешней по отношению к
рассматриваемому объекту среды, называют внешними параметрами.
Если математическое описание проектируемого объекта не содержит
элементов
случайности,
то
математическая
модель
называется
детерминированной.
Математические модели, в которых учитываются случайные факторы,
называются вероятностными (стохастическими).
Таким образом, математическая модель считается заданной, если
имеются формулы (или готовые программы (алгоритмы)), позволяющие по
заданному набору (x1, x2, . . . , xn) вычислить любые интересующие нас
характеристики системы (y1, y2, . . . , ym).
Пространством параметров называется n – мерное пространство,
состоящее из точек с декартовыми координатами (x1, x2, . . . , xn). Обычно
множество X с координатами (x1, x2, . . . , xn) входит в дифференциальные или
другие уравнения, описывающие функционирование системы.
В общем случае, для того чтобы ЛПР принять правильное решение,
необходимо учитывать параметрические и функциональные ограничения.
Ограничения – зависимости между проектируемыми параметрами,
36
которые должны учитываться ЛПР при отыскании решения.
Проектировщики могут указать разумные пределы изменения каждого
из внутренних параметров, которые называются параметрическими и
должны быть учтены ЛПР при принятии оптимального решения.
Таким образом, математические модели задач в СППР на ЭВМ
разрабатываются как в условиях определенности исходных данных для ЛПР,
так и в условиях их неопределенности. Ниже в пособии приводятся
алгоритмы разработки математических моделей для обоих вариантов
условий, а также порядок их решения в составе СППР на конкретных
примерах.
2.3. Математические модели СППР в условиях определённости исходных
данных
2.3.1. Экономико-математическая модель однокритериальной задачи
линейного программирования
Общая постановка задачи линейного программирования
Основой реализации любой задачи управления является принятие
конкретным лицом оптимального решения. Оптимальным считается такое
решение, которое обеспечивает достижение цели в рассматриваемых
условиях с максимальным эффектом. В 1939 г. в издании Ленинградского
государственного университета появилась небольшая книга известного
математика – профессора того же университета Л.В. Канторовича
«Математические методы организации и планирования производства», где
были изложены основы метода линейного программирования, как метода
поиска оптимальных значений линейной функции, в заданных условиях
ограничений переменных образующих исследуемую линейную зависимость.
В 1949 году метод линейного программирования в другой форме был
изложен американским ученым Дж. Б. Данцигом. В опубликованной им
статье был изложен симплексный метод решения задачи линейного
программирования. Симплексный метод Дж.Б. Данцига имел очень много
общего с методом последовательного улучшения плана, применявшимся в
дальнейшем (после 1939 г.) Л.В. Канторовичем и его сотрудниками для
решения ряда практических задач.
Общей задачей линейного программирования (ЗЛП) называют задачу, в
которой функция цели, которую надо оптимизировать, представляет собой
линейную комбинацию известных коэффициентов cj (j=1,n ) и неизвестных
переменных xj ( j =1,n ) вида:
f =c j x j
n
(1)
j=1
Функцию f называют также целевой функцией или критерием
эффективности задачи. Неизвестные неотрицательные переменные
37
xjназываются управляющими переменными.
Ограничения, накладываемые на область возможных решений, имеют
вид линейных неравенств или равенств:
n a x b
ij j
i
j=1
n
a ijx j b i+1
(2)
j=1
.......................
n
a x b
m
j=1 ij j
где 𝑎𝑖𝑗, bi – известные величины, (j =1,n; i = 1,m),
xj, – искомые, неизвестные переменные, причем величины xj,
(j=1,n),положительные.
Таким образом, важной особенностью решения типовой ЗЛП является
то, что она решается всегда в условиях определенности её условий
ограничений и оптимизируется один критерий поиска, образующий функцию
цели в ЗЛП.
Решить задачу линейного программирования – это значит найти
значения управляющих переменных xj, удовлетворяющих ограничениям (2),
при которых целевая функция (1) принимает минимальное или максимальное
значение.
Допустимым решением задачи линейного программирования будем
называть
любую
совокупность
неотрицательных
переменных,
удовлетворяющих условиям (5):
(3)
x j 0 , j = 1, n
Условие (3) принято называть условиями неотрицательности искомых
переменных.
Оптимальным решением X opt = ( x1 , x 2 ,...x n ) будем называть, то из
допустимых решений, для которого линейная функция f (1) обращается в
максимум.
В общем виде оптимизационная задача линейного программирования
(ЗЛП) записывается следующим образом:
Z = F( x ) → max(min), X U ,
(4)
где X = ( x1 , x2 ,..., xn ) ;
U – область допустимых значений переменных x1 , x2 ,..., xn ;
F(X) – целевая функция (функция цели).
Для того чтобы решить задачу оптимизации, достаточно найти ее
X * U
оптимальное
решение
X*,
т.е.
указать
и
найти
Z = F(x) = max(min), для X* = (x1 , x 2 ,...x n ) U
38
Формы представления задач линейного программирования
Задача линейного программирования может быть представлена в одной
из нескольких форм – общей, стандартной или канонической:
Общая
Стандартная
Каноническая
1. Условия ограничения
Уравнения и неравенства
Неравенства
Уравнения
n
n
n
a ijx j = Vi ;
a ijx j =Vi ;
a ijx j Vi ;
j=1
j=1
j=1
i = 1, m i = 1, m i = 1, m
Условия неотрицательности переменных
Часть
Переменных
X j 0
Все переменные
X j 0
Все переменные
X j 0
2. Целевая функция
n
C = c j x j → max(min)
j=1
Форма записи ЗЛП может быть также матричной:
F = CX → max(min); AX = A 0 X 0
где А – матрица коэффициентов системы уравнений;
X – матрица-столбец переменных ЗЛП;
А0 – матрица-столбец правых частей системы ограничений.
(5)
называется
матрицей
условий,
технологической матрицей или матрицей норм расхода в зависимости от
того, какой смысл вложен в совокупность ее элементов.
– вектор переменных,
– вектор ограничений,
39
– вектор весовых коэффициентов.
CX– скалярное произведение векторов С и X.
Разнообразие форм записи условий ЗЛП затрудняет создание и
использование общих методов и вычислительных алгоритмов их решения.
Наиболее строгие требования к форме записи предъявляет
каноническая форма представления задачи, наименее строгие – общая форма.
Для решения ЗЛП симплексным методом без использования ЭВМ её
необходимо привести к канонической форме записи. Ниже в пособии
приведен пример решения ЗЛП с использованием ЭВМ, где приведение
условий ЗЛП к канонической форме АРМ пользователем не требуется и не
выполняется.
Однако прежде чем решить ЗЛП, её на первом этапе необходимо
формализовать, то есть привести вербальное описание условий ЗЛП к
математической форме записи условий ЗЛП – формализовать условия в
форме математической модели.
Формализация задач линейного программирования
Пример 1. Задача об использовании ресурсов
Для выпуска на предприятии двух видов продуктов Р1,Р2 используется
три вида сырья: S1 ,S2 ,S3 . Запасы сырья, технологические коэффициенты
(затраты видов сырья на производство единицы продукцииР1, Р2), а также
прибыль предприятия от реализации единицы каждого продукта приведены в
таблице 1.
Необходимо составить план выпуска продукции, обеспечивающий
получение максимальной прибыли на предприятии.
Таблица 1. – Исходные данные для ЗЛП
Виды сырья
S1
S2
S3
Прибыль
Технологические коэффициенты
Р1
а11
а21
а31
с1
Р2
а12
а22
а32
с2
Запасы сырья
b1
b2
b3
Обозначим:
x1– оптимальное количество единиц продукции Р1, которое
целесообразно выпускать на предприятии для получения максимальной
прибыли;
40
x2– оптимальное количество единиц продукции Р2, которое
целесообразно выпускать на предприятии для получения максимальной
прибыли.
Тогда, используя значения исходных данных из таблицы 1, можно
записать систему ограничений:
а11x1 + а12x2b1,
а21x1 + а22x2b2,
(6)
а31x1 + а32x2b3,
которая показывает, что количество сырья каждого вида, расходуемое на
выпуск продукции, не может быть больше имеющихся запасов.
На переменные x1 и x2 должно быть наложено также ограничение их не
отрицательности, т.е.:
x1 0 , x2 0
(7)
Конечную цель рассматриваемой задачи об использовании ресурсов –
получение максимальной прибыли, записываем в форме функции:
F = с1x1 + с2x2→max,
(8)
которая называется целевой функцией или функцией цели.
Системы ограничений (1) и (2) совместно с целевой функцией (3)
образуют математическую модель условий ЗЛП на максимум, которую затем
можно решать с применением компьютерных технологий.
Пример 2. Транспортная задача
Частным случаем ЗЛП является транспортная задача (ТЗ) – это
экономическая задача о поиске оптимального распределения поставок
однородного товара (груза) от поставщиков к потребителям при известных
затратах на перевозку (тарифах) единицы груза между пунктами отправления
и пунктами назначения.
Пусть имеется два пункта отправления
А1 и
А2 в которых
сосредоточен однородный груз в количестве соответственно а 1 и а2.
Указанный груз надо перевезти в пункты назначения В 1 , В2 , В3 в количестве
соответственно b1, b2 , b3.
При этом возможны три варианта:
Вариант 1 – общие запасы груза на пунктах отправления равны
общим потребностям в грузе пунктов назначения (задача с правильным
балансом);
Вариант 2 – общие запасы груза на пунктах отправления больше
общих потребностей в грузе пунктов назначения (задача с неправильным
балансом);
Вариант 3 – общие запасы груза на пунктах отправления меньше
общих потребностей в грузе пунктов назначения (задача с неправильным
балансом).
Рассмотрим составление математической модели транспортной задачи
для варианта 1, когда общие запасы груза у поставщиков равны общим
потребностям в однородном грузе потребителей, т.е.:
a1 + а2 = b1+ b2+ b3 .
41
Известны тарифы с11, с12, с13,с21,с22, с23 на перевозку единицы груза.
Исходные данные по транспортной задаче сведены в таблицу 2.
Таблица 2. – Исходные данные для ТЗ
Пункты
отправления
А1
А2
За
Потребности
потребителей в
товаре
Технологические коэффициенты
В1
с11x11
с21x21
В2
с12x12
с22x22
В3
с13x13
с23x23
b1
b2
b3
Запасы товара на
пунктах
отправления
а1
а2
Требуется составить оптимальный план перевозок: сколько груза надо
доставить из каждого пункта отправления в каждый пункт назначения,
обеспечивая при этом минимальные общие затраты ЛПР на перевозки
однородного груза.
Согласно таблицы 2 план перевозок для заданных условий задачи
будет состоять из шести искомых переменных: x11,x12, x13, x21, x22, x23–
оптимальное количество перевозимого груза из i-го пункта отправления в jый пункт назначения, которые обеспечат минимальные общие расходы на
перевозку однородного груза, где i =1,2; j = 1,2,3.
2
3
i =1
j=1
Так как имеет место задача с правильным балансом, то а i = b j , и
компоненты плана перевозок груза должны удовлетворять двум условиямограничениям (9), (10):
1.ограничения на запасы
x11+ x12 + x13 = a1,
(9)
x21+ x22 + x23 = a2
2. ограничения на потребности
x11 + x21 =b1 ,
(10)
x12+ x22 = b2 ,
x13+ x23 = b3
При этом необходимо, чтобы xij 0.
(11)
Общие затраты на перевозку можно оценить функцией цели:
F = c11x11 + c12x12 + c13x13 + c21x21 + c22x22 + c23x23→min.
(12)
Системы ограничений (9),(10),(11) совместно с целевой функцией (12)
образуют математическую модель ТЗ, которую затем также можно решать с
применением компьютерных технологий.
Пример 3. Составление рациона питания
Пусть имеется четыре вида продуктов питания: П1, П2, П3, П4 .
Известна стоимость единицы каждого продукта: с1, с2, с3,с4. Из этих
продуктов питания необходимо составить пищевой рацион, который должен
содержать:
42
− белков не менее b1 единиц,
− углеводов не менее b2 единиц,
(13)
− жиров не менее b3 единиц.
Единица продукта П1 содержит а11 единиц белков, а12 единиц
углеводов, а13 единиц жиров и т.д. Содержимое элементов – белков,
углеводов и жиров в единице каждого продукта Пi, i= 1,4 удобно представить
в виде таблицы 3:
Таблица 3– Исходные данные для ЗЛП
Элемент
Продукт
П1
П2
П3
П4
Минимально
необходимое
количество
элементов во
всех
продуктах
Белки
а11
а21
а31
а41
Углеводы
а12
а22
а32
а42
Жиры
а13
а23
а33
а43
b1
b2
b3
Стоимость единицы
продукта питания
с1
с2
с3
с4
Общая стоимость пищевого рациона будет равна:
F = с1x1 +с2x2 + с3x3 + с4x4,
где xi (i = 1,4) – переменные характеризующие оптимальный выбор
количества соответствующих продуктовП1, П2, П3, П4.
Запишем математическое описание условий ограничений для ЗЛП.
В одной единице продукта П1 содержится а11 единиц белка, значит в
x1 единицах продукта – а11x1; в x2 единицах продукта П2 содержится а21x2
единиц белка и т.д. Тогда общее количество белков, содержащееся в
пищевом рационе из всех 4-х продуктов, не должно быть меньшеb1. Отсюда
получаем первое условие –неравенство:
а11x1 + a21x2 + a31x3 + a41x4 b1
(14)
Рассуждая аналогично, получим еще два условия-неравенства для
углеводов и жиров:
а12x1 + a22x2 + a32x3 + a42x4 b2
(15)
а13x1 + a23x2 + a33x3 + a43x4 b3
(16)
При этом аналогично необходимо, чтобы xi 0, i= 1,4
(17)
Условия
(14,15,16,17)
представляют
собой
ограничения,
накладываемые на решение.
Сформулируем задачу: необходимо выбрать неотрицательные значения
переменных x1,x2,x3, x4, удовлетворяющие линейным неравенствам
(14,15,16,17), при которых линейная функция цели этих переменных
4
F = с1x1 +с2x2 + с3x3 + с4x4, = c i x i →min
i =1
43
(18)
будет обращаться в минимум.
Системы ограничений (14,15,16,17), совместно с целевой функцией (18)
образуют математическую модель ЗЛП на минимум, которую затем также
можно решать с применением компьютерных технологий.
Приведенные здесь три типовых примера ЗЛП (в том числе её частный
случай
– ТЗ), являются основными характерными задачами,
встречающимися в мировой экономике при наличии линейной зависимости
между входящими в условия задачи переменными, то есть математической
зависимости переменных первой степени.
В приложении А настоящего учебного пособия приведены варианты
вербального описания ЗЛП, рекомендуется для закрепления материала по
видам описания ЗЛП составить формализованные математические модели
ЗЛП, для их последующего решения с применением ЭВМ.
Решение задач линейного программирования с применением ресурса
ЭВМ
Пример 1. Решение ЗЛП об использовании ресурсов
1.1. Формализация ЗЛП
Для выпуска на предприятии двух видов продуктов Р1,Р2 используется
три вида сырья: S1 ,S2 ,S3 . Запасы сырья, технологические коэффициенты
(затраты видов сырья на производство единицы продукции Р1, Р2), а также
прибыль предприятия от реализации единицы каждого продукта приведены в
таблице 1.
Необходимо составить план выпуска продукции, обеспечивающий
получение максимальной прибыли на предприятии.
Таблица 1. – Исходные данные для ЗЛП
Виды сырья
S1
S2
S3
Прибыль
Технологические коэффициенты
Р1
2
8
5
50
Р2
5
5
6
40
Запасы сырья
20
40
30
Обозначим:
x1 – оптимальное количество единиц продукции Р1, которое
целесообразно выпускать на предприятии для получения максимальной
прибыли;
x2 – оптимальное количество единиц продукции Р2, которое
целесообразно выпускать на предприятии для получения максимальной
прибыли.
Используя значения исходных данных из таблицы 1, запишем систему
ограничений:
44
2x1 + 5x2 20,
8x1 + 5x2 40,
5x1 + 6x2 30,
(19)
На переменные x1 и x2дополнительно накладываем ограничение не
отрицательности, т.е.: x1 0 , x2 0
(20)
Функция цели согласно данных в таблице 1 и условий задачи примет
вид:
F = 50x1 +40x2→max,
(21)
Системы ограничений (19) и (20) совместно с целевой функцией (21)
образуют математическую модель решаемой задачи.
1.2. Решение ЗЛП
Формализованную ЗЛП, согласно полученных условий (19), (20), (21)
решим с использованием опций «Мастер функций» и «Поиск решений»
табличного редактора Excel.
а) Для удобства работы в редакторе Excel перенести таблицу 1 с
исходными данными ЗЛП на рабочий лист. В таблицу внести изменения –
вставить столбец «Результат». В ячейках голубого цвета будут отображаться
результаты расчёта системы ограничений (19), которые должны быть не
более соответствующих значений в столбце «Запасы сырья». Ячейка
зеленого цвета отводится для отображения в ней расчётного максимального
значения функции цели (F). Ниже таблицы выделено место для искомых
значений продуктов x1 и x2 (желтые ячейки) и для ввода ограничения (20)
(рисунок 1).
Рисунок 1 – Исходные данные ЗЛП
б) Выбрать ячейку D3в которую будет записан результат расчёта
первого неравенства системы (14). Выбрать через fxопцию «Мастер
45
функции» в которой выбрать математическую функцию «СУММПРОИЗВ»
(рисунок 2).
Рисунок 2 – Подготовка формы для ввода первого неравенства из
системы (19).
в) Выполнить заполнение массива 1 данными из ячеек B3:C3 и
ячеекB9:C9, тем самым записать в табличный редактор Excel левую часть
первого выражения из условия ограничения (19). Далее ОК (рисунок 3).
Рисунок 3 – Ввод первого неравенства из системы (19).
г) В окне «результат» появится значение «0» (рисунок 4), это
объясняется тем, что значенияx1и x2в ячейках B9:C9, пока равны «0»,
поэтому и общий результат равен «0». Если дважды кликнуть мышью по
значению «0» результата, то мы увидим выделенную связь между ячейками
B3:C3 и B9:C9, значит ввод левой части первого неравенства из системы (19)
выполнен верно.
46
Рисунок 4 – Результат ввода левой части первого неравенства из
системы (19).
д) Выполнить пункты б, в, гв опции «Мастер функции» для левых
частей неравенств 2 и 3 системы (19), получим результат, представленный на
рисунке 5.
Рисунок 5 – Результат ввода левой части системы (1).
е) Ввести аналогично в опции «Мастер функции» согласно выражения
(21) функцию цели F, выбрав предварительно ячейку D6, получим результат,
представленный на рисунке 6.
47
Рисунок 6 – Результат ввода функции цели, согласно (21).
ж) В главном меню Excelвыбрать «Данные», убедиться, что в правой
части меню в группе «Анализ» отображается опция «Поиск решения». Если
опция
не
отображается,
то
через
опции
ФАЙЛ\ПАРАМЕТРЫ\НАДСТРОЙКИ включить опцию «Поиск решения» в
состав группы «Анализ» главного меню Excel (рисунок 7).
Рисунок 7 – Отображение опции «Поиск решения».
З) Выбрать ячейку D6, соответствующую искомому значению функции
цели. Выбрать «Поиск решения». Курсор установить в поле «Изменяя
значения переменных», после чего выбрать ячейки B9:C9. Выбрать
«Максимум», так в задаче определяется максимальная прибыль. Выбрать
метод решения «Поиск решения линейных задач симплекс-методом»
(рисунок 8).
Рисунок 8 – Начало заполнения формы «Поиск решения».
48
и) Выбрать «Добавить», отобразиться форма «Добавление
ограничения». Ввести в окно «Ссылка на ячейки» ячейки D3:D5.Ввести знак
«меньше». В окне «Ограничение» ввести ячейки Е3:Е5 (рисунок 9). Тем
самым вводится ограничение соответствующее системе (19).
Рисунок 9 – Ввод ограничения согласно системы (14).
к) Выбрать опять «Добавить», и ввести в форму «Добавление
ограничения» слева ячейки B9:C9, выбрать знак неравенства «больше или
равно», справа B10:С10 (рисунок 10). Тем самым вводится ограничение, что
искомые переменные x1 и x2должны быть больше или равны 0 (условие
соответствующее ограничению (20)).
Рисунок 10 – Ввод ограничения согласно условию (20).
л) Выбрать ОК. Получим форму «Поиск решения» с отображенными
условиями ограничениями (рисунок 11).
49
Рисунок 11 – Результат ввода условий ограничений.
м) Выбрать «Параметры». В форме (рисунок 12) можно выбрать опцию
«Показывать результаты итераций», тогда оптимизация функции цели будет
отображаться итерационно (пошагово) – рисунки 13-15. Если опцию не
выбирать, то оптимальное (максимальное) значение функцииFотобразиться
сразу после выбора «Найти решение» (рисунки 13-16).
Рисунок 12 – Выбор параметров для решаемой задачи.
50
Рисунок 13 – Определение значений функции цели и значений x1 и
x2по-итерационно (результат первой итерации).
Рисунок 14 – Определение значений функции цели и значений x1 и
x2по-итерационно (результат второй итерации).
Рисунок 15 – Определение конечных значений функции цели и
значений x1 и x2 (результат третьей итерации).
51
Рисунок 16 – Определение конечных значений функции цели и
значений x1 и x2за один шаг
н) Выбрать ОК. Результаты решения сохранятся в форме (рисунок 17).
Рисунок 17 – Сохранение полученного результата решения ЗЛП.
н) Если полученный результат не устраивает ЛПР можно выбрать
«Отмена» – результат решения «обнулится», однако все условия ограничения
по условиям задачи в форме «Поиск решения» сохранятся. Например, если
ЛПР нужно получить результат в целых числах переменных x1 и x2, то
необходимо добавить к этим переменным требование их целочисленности
(рисунок 18,19), то есть ещё одно ограничение.
52
Рисунок 18 – Добавление требования целочисленности переменных x1 и x2.
Рисунок 19 – Отображение требования целочисленности переменных x1 и x2.
о) После выбора «Найти решение» (без итераций) получим результат
(рисунок 20) в целых числах переменных.
Рисунок 20 – Получение результата ЗЛП по x1 и x2 в целых числах.
53
Выводы
1.При заданных начальных условиях ограничениях предприятие
получит максимальную прибыль 265,2173913 условных единиц, за счет
реализации продуктов Р1 в количестве 3,913043478 и Р2 в количестве
1,739130435 условных единиц соответственно.
2. Если товар необходимо выпускать в целых единицах, то можно
получить максимальную прибыль только в 250 условных единиц, за счет
реализации продуктов Р1 в количестве 5 условных единиц, продукт Р2
вообще выпускать нецелесообразно.
3. Если требование целочисленности не применять к условиям данной
задачи, то сырьё S2иS3 выделяемое на выпуск продуктов Р1 и Р2 расходуется
полностью, сырье S1остаётся в количестве примерно 3,5 условных единиц
(17,5%).
4. Если требование целочисленности применять к условиям данной
задачи, то сырьё S2 выделяемое на выпуск продуктов Р1 и Р2 расходуется
полностью, а сырье S1и S3остаётся в количестве 50% и примерно
17%соответственно. При таких условиях налицо неэффективное вложение
средств и требует от ЛПР пересмотреть условия постановки ЗЛП.
Пример 2. Решение транспортной задачи
2.1. Формализация транспортной задачи
Пусть имеется два пункта отправления
А1 и
А2 в которых
сосредоточен однородный товар в количестве соответственно 40 и 60
условных единиц соответственно. Указанный товар надо перевезти в пункты
назначения В1 , В2 , В3 в количестве соответственно 20, 35, 45 условных
единиц соответственно.
В настоящем примере имеет место вариант №1 – общие запасы товара
на пунктах отправления равны общим потребностям в товаре пунктов
назначения (задача с правильным балансом), т. е:
a1 + а2 = b1+ b2+ b3 .
Известны тарифы с11, с12, с13,с21,с22, с23на перевозку единицы товара, в
таблице 3 они указаны на пересечении соответствующих пунктов
отправления и пунктов назначения. Исходные данные по транспортной
задаче сведены в таблицу 2.
Таблица 2. – Исходные данные для ТЗ
Пункты
отправления
А1
А2
За
Потребности
потребителей в
товаре
Технологические коэффициенты
В1
4
3
В2
2
1
В3
6
4
20
35
45
Запасы товара на
пунктах
отправления
40
60
Требуется составить оптимальный план перевозок однородного товара
54
в условных единицах из пунктов отправления в пункты назначения,
обеспечивая минимальные общие затраты ЛПР на перевозку товара.
Согласно таблицы 2 план перевозок для заданных условий задачи
будет состоять из шести искомых переменных: x11,x12, x13, x21, x22, x23–
оптимальное количество перевозимого товара из каждого пункта
отправления в каждый пункт назначения, которые обеспечат минимальные
общие расходы на перевозку однородного товара.
2
3
i =1
j=1
Так как имеет место задача с правильным балансом, то а i = b j ,
тогда можно составить 2 условия-ограничения компоненты плана перевозок
товара должны удовлетворять двум условиям-ограничениям:
2.ограничения на запасы
x11+ x12 + x13 = 40
(22)
x21+ x22 + x23 = 60
2. ограничения на потребности
x11 + x21 = 20
(23)
x12+ x22 = 35
x13+ x23 = 45
При этом необходимо, чтобы xij 0. i =1,2; j = 1,2,3
(24)
Общие затраты на перевозку можно оценить функцией цели:
F = 4x11 + 2x12 + 6x13 + 3x21 + x22 + 4x23→min.
(25)
Системы ограничений (22-24) совместно с целевой функцией (25)
образуют математическую модель ТЗ, которую решим с применением
компьютерных технологий.
2.2. Решение ТЗ
Формализованную ТЗ, согласно полученных условий-ограничений (2224) и функции цели (25) решим с использованием опций «Мастер функций»
и «Поиск решений» табличного редактора Excel.
а) Аналогично, как и при решении ЗЛП (пример 1), таблицу 2 с
исходными данными ТЗ перенесём на рабочий лист Excel (рисунок 21). В
таблицу ниже внесём при этом изменения – встав столбец и строку
(отображены желтым цветом), в этих ячейках будут отражены данные
соответствующие ограничениям (22), (23). Ячейка Е10 (зеленый цвет)
определит место для искомого значения функции цели (25). Ячейки
выделенные голубым цветом соответствуют рассчитываемым значениям :
x11, x12, x13, x21, x22, x23. Таблица расположенная ниже в ячейках B13:D14
предназначена для ввода ограничений о неотрицательности всех искомых
переменных (24),
55
Рисунок 21 – Исходные формы для ввода данных ТЗ.
б) Ввести левые части ограничений согласно выражений (22), (23)
аналогично как они вводились при решении ЗЛП (пример 1, пп. б, в, г, д), при
этом вместо математической функции «СУММПРОИЗВ» необходимо
выбирать функцию «СУММ», получим результат (рисунок 22).
Рисунок 22 – Результат ввода левой части ограничений (22, 23)
в)
Ввести
функцию
цели
(25),
56
при
этом
ячейки
таблицы,
соответствующие стоимости перевозки единицы товара с11, с12, с13,с21,с22,
с23(верхняя таблица) перемножаются на искомые переменные (ячейки
голубого цвета), получим результат (рисунки 23, 24).
Рисунок 23 –Процесс ввода функции цели Рисунок 24 –Результат ввода ФЦ
г) Далее действуем аналогично действиям показанным в примере 1
(Пример 1 п.п. ж, з, и, к, л, м, н). Отличия заключается в следующем:
– в опции «Поиск решения» необходимо выбрать «Минимум», так
как в ТЗ преследуется цель в определении минимальных затрат на перевозку
товара из пункта отправления в пункты назначения;
– при определении условий ограничений между левой и правой
частями в выражениях (22), (23) выбирается знак равенства, а не «меньше».
После ввода всех ограничений (22-24), получим результат
представленный на рисунке 25.
Рисунок 25 –Результат ввода всех ограничений в ТЗ.
57
Затем выбрав «Найти решение», получим конечный результат (рисунок
26).
Рисунок 26 –Результат решения ТЗ.
Вывод:
1. Перевозку товаров с пунктов отправления А1и А2 в пункты
назначения В1 , В2 , В3 следует организовать по схеме указанной в ячейках
голубого цвета.
2. При этом будет обеспечена минимальная стоимость этих перевозок,
равная 315 условным единицам.
Решение практической задачи линейного программирования на
составление рациона питания, описание которой дано выше (пример 3),
предлагается студентам выполнить самостоятельно. Быть готовым своё
решение пояснить на практическом занятии по дисциплине.
Условие задачи:
Имеется три вида продуктов питания: П1, П2, П3. Известно количество
белков, углеводов и жиров в единице каждого продукта, а также стоимость
единицы каждого продукта (таблица 1). Из этих продуктов питания
необходимо составить пищевой рацион, который должен содержать белков,
углеводов и жиров не менее количества указанного в таблице 1.
Таблица 1 – Исходные данные для ЗЛП
Элемент
Продукт
П1
П2
П3
Нижний предел по
количеству элементов
в составе рациона
питания (в усл.ед.)
Белки
6
7
4
Углеводы
5
4
8
Жиры
8
3
5
120
100
80
58
Стоимость единицы
продукта питания
(условные единицы)
55
40
72
Требуется:
1. Формализовать ЗЛП на составление рациона питания;
2. Определить необходимое количество продуктов питания каждого
вида, которое должно войти в состав рациона питания;
3. Определить минимальную стоимость рациона питания,
составленного из продуктов питания, для заданных условий ЗЛП, в том числе
при условии, что количество продуктов питания П1, П2, П3 может быть как
дробным так и целым числом.
2.3.2. Математические модели в многокритериальных задачах
оптимизации искомого решения
Общая схема и подходы решения многокритериальных задач принятия
решений
Выше были рассмотрены задачи по одному критерию оптимизации
(показателю эффективности, обращаемому в min (max)), по которому и
принималось решение ЛПР. Однако на практике встречается очень много
задач, в которых эффективность результата зависит от множества критериев
(и им соответствующих показателей), а значит не может быть полностью
оценена с помощью единственного показателя эффективности. Чем больше
критериев качества вводится в рассмотрение, тем более правильное решение
может быть принято ЛПР по исследуемой проблеме (задаче).
Часто в специальной литературе термин «многокритериальная
оптимизация» меняют на термин «векторная оптимизация», считая их
синонимами, так ли это? С точки зрения математического аппарата
отождествление терминов «векторная оптимизация» и «многокритериальная
оптимизация» справедливо, однакос точки зрения экономической, между
ними есть принципиальное различие: в первом случае, речь идет о
совокупности (векторе) критериев различных подсистем, во втором — о
векторе разнородных критериев оптимальности некоторой системы в целом.
Ко второму случаю, то есть к понятию «многокритериальная оптимизация»
можно отнести оптимизацию развития по множеству разнородных
критериев, часто противоположных по направлению: общество
одновременно заинтересовано в повышении жизненного уровня и
укреплении обороны, в развитии химии и охране окружающей среды, в
удовлетворении сегодняшних нужд и в обеспечении нужд будущих
поколений и т.д.
Основоположником исследования проблем при многокритериальной
оптимизации является итальянский экономист В. Парето(1848 – 1923 гг.),
при математическом исследовании товарного объёма. Позднее стало ясно,
что многокритериальные задачи возникают не только в экономике, но и в
технике: например, при проектировании технических систем, при
59
оптимальном проектировании интегральных схем, в военном деле и т.д.
Построение моделей многокритериальных задач принятия решений
является сложной процедурой, состоящей из формализованных и
неформализованных этапов. Этапы этой процедуры обусловливаются
элементами многокритериальной модели, а последовательность этапов и
виды возможных итераций – взаимосвязями элементов.
Общая схема решения многокритериальных задач принятия решений
может быть представлена как показано на рисунке 1.
Важными этапами здесь являются:
− этапы упорядочивания возможных альтернатив принятия решений
ЛПР через критерии (показатели) их оценки (этап 8);
− результаты упорядочивания анализируются (этап 9).
В случае не удовлетворенности ими ЛПР, исследуются причины
неудовлетворенности. Такими причинами могут оказаться, например,
выпадение из анализа какого-либо допустимого варианта решения
(альтернативы), не полнота набора критериев, используемых в модели и т.п.
В процессе построения и исследования многокритериальной модели
участвуют, как правило, три группы лиц: ЛПР, аналитик и эксперты.
Аналитик осуществляет организацию процесса принятия решения по
тому или иному методу. Его участие необходимо на всех этапах (рисунок 1).
Эксперты привлекаются на тех или иных этапах по усмотрению ЛПР
или аналитика. Без привлечения ЛПР могут быть выполнены лишь два этапа:
построение решающего правила (этап 7) и упорядочивание на его основе
вариантов решения (этап 8).
Рисунок 1. – Этапы решения многокритериальных задач
60
Есть разные подходы к задачам многокритериальной оптимизации –
подходы, связанные с нахождением некоторого компромисса между целями
подсистем и рассматриваемыми критериями, перечислим эти подходы:
1) Критерии ранжируют по важности, выделяют один из них в качестве
главного (тогда уровни остальных фиксируются как дополнительные
ограничения). Оптимизация по одному из критериев называется
субоптимизацией.
2)При ранжировании приписывают критериям определенные веса
(соответственно их важности) и на этой основе строят единый скалярный
критерий, отражающий общую цель системы (метод скаляризации
векторного критерия).
3) В основе подхода лежит использование принципа оптимальности по
Парето, когда векторную задачу оптимизации сводят к поиску множества
эффективных планов. При этом принимают, что если при улучшение какогото одного показателя (критерия) из всех оптимизируемых критериев
потребуется ухудшение хотя бы одного из остальных критериев, задача по
поиску оптимального векторного пространства прекращается и считается –
оптимум достигнут.
4) Подход, когда задачу векторной оптимизации сводят к задаче теории
игр, в которой игроками выступают подсистемы, имеющие несовпадающие
цели и критерии. В этом случае задачу оптимизации решают в условиях
неопределенности исходных данных и конечного результата.
2.3.3. Методы решения многокритериальных задач принятия решений
используемые в СППР в условиях определенности исходных данных
Методы решения многокритериальных задач принятия решений
используемые в СППР основываются на научных подходах к
многокритериальной оптимизации перечисленных в п.3.2.1 настоящего
пособия. При этом в одном методе может использоваться несколько
подходов, например как в методе последовательных уступок, в котором
используются подходы 1 и 3, ниже рассмотрена суть метода
последовательных уступок в общем виде.
Метод последовательных уступок
На начальной стадии метода последовательных уступок согласно
алгоритма (рисунок 2), формируются условия задачи многокритериальной
оптимизации (ЗМО) – ЛПР ранжирует критерии по степени важности,
выделяя один из них в качестве главного, а значения остальных критериев
фиксируются как дополнительные условия-ограничения в общей системе
ограничений с определенным допуском в сторону отклонения от их
оптимального значения, но не более допустимых отклонений.
На основном этапе решения ЗМО методом последовательных уступок
61
ЛПР добивается выполнения
принципа оптимальности по Парето –
невозможно улучшить значения основного критерия ЗМО, не ухудшив при
этом значения любого из остальных критериев в ЗМО (заданных условиями
ограничениями).
На завершающем этапе решения ЗМО, при достижении в ЗМО условий
по Парето решение ЗМО методом последовательных уступок прекращается,
решение признается оптимальным при соответствующих значениях функций
цели по основному критерию и функций цели по остальным критериям. ЛПР
делает вывод о полученных значениях всех критериев в ЗМО и при каких
зависимых переменных они получены. Далее при необходимости
корректирует условия ЗМО и выполняет решение методом последовательных
уступок заново.
Таким образом, при решении ЗМО методом последовательных уступок
критерии нумеруются в порядке убывания важности. Затем задача
формализуется в форме математической модели: условий ограничений и
функции цели. Ниже рассматриваются этапы решения ЗМО в общем виде.
Рисунок 2. – Алгоритм метода последовательных уступок
62
Первый этап. Постановка ЗМО, формализация условий путём
составления математической модели, для последующего решения ЗМО
методом последовательных уступок.
Постановку ЗМО согласно рисунка 6 можно описать следующим
образом. Пусть решаемая ЛПР задача зависит от К критериев, каждый из
которых, в свою очередь зависит от xi, i = ̅̅̅̅̅
1, 𝑛переменных, то есть критерии
можно записать как
̅̅̅̅̅
𝑓𝑘 (𝑋) (𝑋 = (𝑥1 , 𝑥2 , … 𝑥𝑛 ) , k = 1,
𝐾.
Как правило, в ЗМО часть критериев в рамках решаемой задачи ЛПР
должны стремиться к максимуму, а другая их часть должны стремиться к
минимуму. Тогда ЗМО в общем виде можно записать следующим образом:
{𝑓1 (𝑋), 𝑓2 (𝑋), … 𝑓𝑘−𝑑 (𝑋)} → 𝑚𝑎𝑥,
(1)
{𝑓𝑘−𝑑+1 (𝑋), 𝑓𝑘−𝑑+2 (𝑋), … 𝑓𝑘 (𝑋)} → 𝑚𝑖𝑛
(2)
𝐹(𝑥) = {𝑓1 (𝑋), 𝑓2 (𝑋), … 𝑓𝑘 (𝑋)} → 𝑚𝑎𝑥(min),
(3)
гдеd – число критериев в ЗМО, стремящихся к минимуму,
k-d – число критериев в ЗМО, стремящихся к максимуму.
В ЗМО решаемой ЛПР может быть цель – найти максимум или
минимум функции цели (3):
𝐹(𝑥) = {𝑓1 (𝑋), 𝑓2 (𝑋), … 𝑓𝑘 (𝑋)} → 𝑚𝑎𝑥 (min),
(4)
при соблюдении условий-ограничений (4),(5)
≥
(𝑋)
𝑔𝑖
{≤} 𝑏𝑖 𝑖 = ̅̅̅̅
1, 𝐼 – число условий-ограничений
(5)
=
𝑋 = (𝑥1 , 𝑥2 , … 𝑥𝑛 ) ≥ 0,
(6)
n – число независимых переменных в I-условиях-ограничениях.
Предположим, что в выражении (4) f1(X) – основной критерий в
решаемой ЗМО, который должен согласно (1) стремиться к максимуму и не
терпит каких-либо «уступок» в сторону своего понижения, за счет изменения
входимых
в
него
независимых
переменныхX.Для
остальныхкритериев{𝑓2 (𝑋), … 𝑓𝑘−1 (𝑋)}заданысоответствующие
«уступки»∆jв
сторону их изменения от оптимальных своих значений (7):
∗
(𝑋) ± ∆𝑘−1 ,
𝑓2∗ (𝑋) ± ∆2 , 𝑓3∗ (𝑋) ± ∆3 , … 𝑓𝑘−1
(7)
*
где fj (X), 𝑗 = ̅̅̅̅̅̅̅̅̅̅
2, 𝐾 − 1– оптимальные значения критериев без учета
выполненных изменений по допустимым к ним «уступкам» ∆j.
Второй
этап.
Определяются
оптимальные
∗
∗ (𝑋); ∗ (𝑋),
значения𝑓2
𝑓3
… 𝑓𝑘−1 (𝑋),(кроме
первого,
основного
критерия),согласно (1), (2),то есть всех критериев зависимых от
соответствующих𝑋 = (𝑥1 , 𝑥2 , … 𝑥𝑛 ) ≥ 0,без учёта возможных «уступок»
(изменений) от их оптимальных значений, с учётом условийограничений(5),(6).
При
наличии
оптимальных
значений
∗
∗ (𝑋); ∗ (𝑋),
𝑓2
𝑓3
… 𝑓𝑘−1 (𝑋), можно переходить к 3 этапу решения ЗМО, если нет,
хотя бы по одному критерию, необходимо внести изменения в исходные
условия-ограничения и повторить расчёт оптимальных значений критериев,
добившись положительного результата.
63
Третий этап. Вводятся в систему условий-ограничений (5), (6)
дополнительные условия-ограничения (8), на основе(1),(2),(7) по критериям
∗
(𝑋), с учетом полученных оптимальных значений этих
𝑓2∗ (𝑋); 𝑓3∗ (𝑋), … 𝑓𝑘−1
критериев на втором этапе.
Условия-ограничения в общем виде примут вид:
≥
̅̅̅̅𝐼 – начальное число условий-ограничений
𝑔𝑖 (𝑋) {≤} 𝑏𝑖 𝑖 = 1,
=
𝑋 = (𝑥1 , 𝑥2 , … 𝑥𝑛 ) ≥ 0,
Дополнительное число условий-ограничений, с учётом выполненных
«уступок», по всем критериям, кроме первого.
≥
𝑓2 (𝑋) { } 𝑓2∗ ± ∆2
≤
≥
𝑓2 (𝑋) { } 𝑓2∗ ± ∆2
(8)
≤
………..
≥ ∗
(𝑋)
𝑓
{
}𝑓
± ∆𝑘−1
𝑘−1
{
≤ 𝑘−1
Выражение функции цели по основному критерию в общем виде
примет вид (9):
𝑓1 (𝑋) → 𝑚𝑎𝑥,
(9)
где X – независимые переменные из перечня 𝑋 = (𝑥1 , 𝑥2 , … 𝑥𝑛 ),
Четвертый этап. Определить значение функции цели (9), в условиях
ограничениях (5), (6), (8). Достижение оптимальных значений всех K
критериев в области допустимых значений (ОДЗ) независимых переменных
для данных условий ЗМО и будет соответствовать цели в поставленной
задаче. Если любое изменение «уступок» по каждому из критерию выведет
значения других критериев за пределы их ОДЗ, значит оптимальные
значения всех K критериев соответствуют Парето-оптимальной ОДЗ.
Для более глубокого понимания смысла происходящих процессов при
поиске оптимальных значений критериев в ЗМО и построения Паретооптимальной ОДЗ, ниже рассматривается решение ЗМО геометрическим
методом последовательных уступок, при наличии зависимости критериев
оптимизации всего от двух независимых переменных, то есть X= (x1,x2).
Пример 1.Решение ЗМО методом последовательных уступок
(геометрический метод)
Условия задачи
Задача трехкритериальной оптимизации задана условиями:
Функциями целей по трём критериям (10), (11), (12):
𝑧1 = −𝑥1 + 2𝑥2 → max
(10)
𝑧2 = 2𝑥1 + 𝑥2 → max
(11)
𝑧3 = 𝑥1 − 3𝑥2 → max
(12)
Условиями-ограничениями (13), (14)
64
𝑥1 + 𝑥2 ≤ 6
{ 1 ≤ 𝑥1 ≤ 3
1 ≤ 𝑥2 ≤ 4
𝑋 = (𝑥1 , 𝑥2 ) ≥ 0
(13)
(14)
Известно также, что по значениям критериев (10,(12) допускается
сделать «уступки» для обеспечения роста значения 2-го критерия (11).
Допустимые уступки могут составить: δ1 = 3; δ2 = 2.
Заметим, так как коэффициенты при одних и тех же переменныхX в
критериях (10),(11),(12) имеют разные знаки, то в искомой области
допустимых решений ЗМО невозможно одновременно улучшить все частные
критерии, т.е. в рассматриваемом случае ОДЗ (область Парето) образуемая
условиями ограничений (13,(14) будет совпадать с областью допустимых
решений по всем трём критериям (10),(11),(12).
Решение ЗМО
Максимизируем функцию Z1 в области допустимых решений, т.е.
решаем однокритериальную задачу (10), в условиях-ограничениях (13),(14).
Так как все независимые переменные X=(x1,x2) входят в состав
функций цели и условий ограничений в первой степени, то имеют место
условия задачи линейного программирования (ЗЛП).
Для наглядности хода решения методом последовательных уступок
оптимизируем последовательно каждый из критериев геометрическим
способом без учёта уступок по первому и третьему критерию.
По первому критерию ОДЗ для переменных x1,x2в соответствии с
условиями-ограничениями (13), (14) примет вид как показано на рисунке 7.
Градиент функции Z1 является вектором, который указывает
направление наибольшего возрастания функции в каждой точке. Он
определяется как вектор, состоящий из частных производных функции по
каждой из переменныхx1,x2.
Под углом 900к градиенту определяется прямая на плоскости
соответствующая углу наклона относительно ОДЗ (пунктирная прямая).
Параллельно переносим эту прямую в направлении максимизации Z1,
крайняя точка касания прямой Z1ОДЗ и будет соответствовать максимуму Z1.
Подставив координатыZ1maxпо x1иx2, в выражение (10) получим
Z1max= 7.
65
Рисунок 7. – Определение максимального значения первого критерия
геометрическим методом
Аналогично определим максимальное значение второго критерия 𝑧2 =
2𝑥1 + 𝑥2 → 𝑚𝑎𝑥, получим ОДЗ и максимальное значение критерия Z2 , как
показано на рисунке 8.
Рисунок 8. – Определение максимального значения второго критерия
геометрическим методом
Подставив координаты Z2max по x1 и x2, в выражение (11) получим Z2max= 9.
66
Максимальное значение третьего критерия𝑧3 = 𝑥1 − 3𝑥2 → 𝑚𝑎𝑥 ,
определяется в ОДЗ переменных x1иx2, представленной на рисунке 9 и
соответствует Z3max= 0.
.
Рисунок 9. – Определение максимального значения третьего критерия
геометрическим методом
Из рисунков 7,8,9 видно, что условия-ограничения (13), (14) позволяют
определить максимальные значения всех трёх критериев в ЗМО. На всех трёх
рисунках имеется ОДЗ переменных x1,x2всегдаравная площади области
допустимых решений (ОДР) ЗМО.
Проверим, как изменится площадь ОДР (ОДЗ) после выполнения
заданных «уступок» по первому и второму критерию и чему будут равны все
3 искомых максимально возможных критерия Z1max, Z2max, Z3max.
Сократим значение Z1maxна δ1 = 3, а Z2maxна δ2 = 2. Тогда в условияограничения ЗМО к начальным условиям-ограничениям добавится ещё два
дополнительных условия ограничения, запишем их в одной системе (15):
𝑥1 + 𝑥2 ≤ 6
1 ≤ 𝑥1 ≤ 3
1 ≤ 𝑥2 ≤ 4
−𝑥1 + 2𝑥2 ≥ 4
{ 2𝑥1 + 𝑥2 ≥ 7
(15)
Аналогично выполним построение ОДЗ (ОДР) для заданных (15)
условий-ограничений с учётом также условия-ограничения (14). ОДЗ для
всех трёх критериев будет выглядеть, как показано на рисунке 10.
67
Рисунок 10. – Заключительный обобщенный график определения
оптимальных значений 3-х критериев в заданных условиях-ограничениях, с
учётом возможных «уступок».
Из рисунка 10 видно, что в ЗМО определена ОДЗ как Паретооптимальная область, в которой есть единственно возможные оптимальные
значения всех Z1max= 4, Z2max= 7 , Z3max= -7, при x1=2и x2=3, удовлетворяющие
условиям-ограничениям по всем 3 критериям.
Пример 2. Решение ЗМО методом последовательных уступок (с
применением ППП Excel)
Безусловно, быстрее можно решить ЗМО с применением ППП Excel с
использованием опции «Поиск решения» при условии линейной зависимости
независимых переменных входящих в состав условий-ограничений и
функций цели по каждому из критериев. Продемонстрируем это на
небольшом примере.
Условия задачи
Решить задачу методом последовательных уступок, если уступка по
первому критерию составляет 10% от его оптимального значения.
68
F ( x ) = f 1 = x1 + 3x 2 , f 2 = 40 x1 + 10 x 2 → max
2 x1 + x 2 90
x1 + x 2 60
x 50
2
x1 , x 2 0
Решение задачи
И в данном примере, ЗМО имеет линейную зависимость переменных,
то есть имеет место ЗЛП в составе уже формализованных 2-х функций цели и
системы
условий-ограничений.
Для
удобства
целесообразно
формализованные условия ЗЛП перенести на рабочий лист ППП Excel. Затем
заданные условия-ограничения и функции цели записать по ячейкам таблицы
Excel, как показано слева на рисунке 11.
Рисунок 11. – Внесение исходных данных ЗМО по двум критериям в таблицу
Excel, для последующего решения задачи.
Далее выполнить решение ЗМО в последовательности, описанной в
примере 1 п.3.1.3. После внесения левых частей условий-ограничений через
опцию «Мастер функции» и выражений функций цели f1и
f2получитьтаблицу,представленную на рисунке 12.
Рисунок 12. – Результат внесения данных через «Мастер функций»
69
Решить ЗМО по первому критерию, используя опцию «Поиск
решения». Так как исходные условия-ограничения на данном этапе решения
ЗМО одинаковые как для первого критерияf1, так и для второго критерия f2,
и для обеих функций определяется максимум, то при поиске результата
решения по f1 , результат отобразится и по f2 (рисунок 13). Сохранять
найденное решение нецелесообразно, так как согласно условий ЗМО,
необходимо выполнить «уступку» по первому критерию, то есть ввести
новое условие-ограничение, а значит надо будет выполнять поиск
оптимальных значений f2с учётом «уступки» по f1. Таким образом, получено
промежуточное решение ЗМО:
𝑓1𝑚𝑎𝑥 = 47,5 при 𝑥1 = 44,5; 𝑥2 = 1;
𝑓2𝑚𝑎𝑥 = 1790 при 𝑥1 = 44,5; 𝑥2 = 1.
Рисунок 13. – Результат поиска решения в ЗМО по 2-м критериям.
Согласно условий задачи, необходимо выполнить «уступку» по
первому критерию на 10% от его оптимального значения. Таким образом,
добавляем в систему условий-ограничений дополнительное ограничение
(16):
𝑥1 + 3𝑥2 ≥ 47,5 − 4,75 ,𝑥1 + 3𝑥2 ≥ 42,75
(16)
Исходная таблица с условиями-ограничениями примет вид (рисунок
14):
Рисунок 14. – Результат ввода ограничения по «уступке» в ЗМО по 2-м
критериям.
70
Выполнить поиск максимального значения функции цели f2, с учётом
выполненной «уступки» по f1, получен результат(рисунок 15).
Рисунок 15. – Результат решения ЗМО методом последовательных
уступок.
Из рисунка 15 видно, введенное дополнительное ограничение на 10%
по первому критерию внесло коррективы в значения как самих критериев f1
иf2 , так естественно и в значения переменных. Получены результаты
решения ЗМО:
𝑓1𝑚𝑎𝑥 = 45 при 𝑥1 = 45; 𝑥2 = 0;
𝑓2𝑚𝑎𝑥 = 1800 при 𝑥1 = 45; 𝑥2 = 0.
Пример 3. Формализовать и решить самостоятельно типовую
практическую задачу многокритериальной оптимизации методом
последовательных уступок с применением ППП Excel. Быть готовым
своё решение пояснить на практическом занятии по дисциплине.
Условие задачи:
Предприятие может выпускать пять видов продукции И1, И2, ИЗ, И4,
И5. Для этого используется три вида ресурсов, расход которых на
производство единицы продукции и их запасы приведены в таблице:
Ресурс
И1
И2
ИЗ
И4
И5
Запасы
В1
4
5
3
2
3
3000
В2
2
4
4
4
2
4500
В3
3
1
1
1
1500
0
Все изделия обрабатываются на станках четырех типов. Норма времени
на обработку одного изделия и фонд времени работы станков приведены в
таблице:
Вид станков
Станок 1
Станок 2
И1
И2
И3
И4
И5
2
1
3
2
5
6
4
3
5
2
71
Фонд времени
(ст./час)
5000
4000
Станок 3
3
4
4
1
4
4000
Станок 4
1
1
2
2
1
2000
Оптовая цена и себестоимость единицы продукции соответствующего
типа приведены в таблице:
Оптовая цена (ден.ед.)
Себестоимость(ден.ед.)
И1
10
7
И2
9
8
И3
12
9
И4
14
12
И5
9
6
Объем каждого вида продукции должен быть не менее 100 и не более
500 единиц. Мерой эффективности производственной программы являются
следующие показатели:
1. Прибыль предприятия – f1;
2. Валовый объем выпуска продукции в стоимостном выражении – f2;
3. Себестоимость продукции – f3;
4. Уровень загрузки оборудования – f4.
Требуется
1. Решить задачу методом последовательных уступок, если уступку по
каждому критерию полагать равной 10% от его оптимального значения.
Метод свёртывания критериев
Метод свёртывания критериев при решении ЗМО предполагает
преобразование набора имеющихся частных критериев в один супер
критерий.
𝐹 = 𝜑(𝑓1 , 𝑓2 , … 𝑓𝑛 )
(17)
Новый супер критерий F, который является функций φ от частных
критериев𝑓1 , 𝑓2 , … 𝑓𝑛 . В общем случае, функциюφназывают свёрткой частных
критериев.
К основным этапам свёртывания критериев относятся:
1этап. Обоснование допустимости свертки
При обосновании допустимости свертки, необходимо убедиться, что
критерии, которые сворачиваются, однородны. При этом критерии считаются
однородными, если они принадлежат к одной из групп, в которых
анализируются следующие показатели эффективности:
1) показатели результативности;
2) показатели ресурсоемкости;
3) показатели оперативности.
Критерии, которые мы сворачиваем, должны относиться к одной и той
же группе, нельзя сворачивать критерии, которые относятся, например, один
из них к показателям оперативности, а другой к показателям
результативности. То есть, для каждой группы свёртывание частных
72
критериев следует выполнять отдельно. При нарушении этого принципа
теряется смысл критерия.
2 этап. Нормировка критериев
Необходимость в нормировании критериев возникает в тех случаях,
когда показатели их описывающие имеют различные единицы и масштабы
измерения, что делает невозможным их непосредственное сравнение. К
единому и безразмерному виду критерии приводятся посредством операции
нормирования (стандартизации).
Наиболее
распространенными
способами
нормирования
(стандартизации) критериев являются 4 способа:
𝑥𝑗𝑖−𝑥
𝑥𝑗𝑖
𝑥𝑗𝑖
𝑥𝑗𝑖
1) 𝑥𝑗𝑖н =
; 2) 𝑥𝑗𝑖н = э ; 3) 𝑥𝑗𝑖н = 𝑚𝑎𝑥; 4)𝑥𝑗𝑖н = 𝑚𝑎𝑥 𝑖𝑚𝑖𝑛 ,
(18)
𝑥𝑖
𝑥𝑖
𝑥𝑖
𝑥𝑖
−𝑥𝑖
где
𝑥𝑗𝑖н – нормированное значение i-го критерия для j–го объекта;
𝑥𝑗𝑖 – значение i-го критерия для j–го объекта;
𝑥𝑖 – среднеарифметическое значение i-го критерия;
𝑥𝑖э –некоторое эталонное значение i -го критерия;
𝑥𝑗𝑖−𝑥𝑖 – центрированное значение i-го критерияj –го объекта.
𝑥𝑖𝑚𝑎𝑥 – максимальное значение i -го критерия по всем j-му объекту;
𝑥𝑖𝑚𝑖𝑛 – минимальное значение i -го критерия по всем j-му объекту;
3этап. Учет приоритетов критериев
Учет приоритетов критериев обычно задается векторами весовых
коэффициентов, которые отображают важность того или иного критерия для
решаемой задачи.
4 этап. Построение функции свёртки
Для свертывания критериев, используют следующие основные типы
функций:
- аддитивные функции свёртки;
- мультипликативные функции свёртки;
- агрегированные свёртки.
Аддитивная свёртка
Аддитивную свёртку критериев можно рассматривать как реализацию
принципа справедливой компенсации абсолютных значений нормированных
частных критериев. В этом случае, суперкритерий обычно строится как
взвешенная сумма частных критериев:
𝐹(𝐴𝑖 ) = ∑𝑛𝑖=1 ∝𝑖 𝑓𝑖 (𝐴𝑖 )
(19)
Весовые коэффициенты ∝i выбираются такими, чтобы их сумма была
равна единицы ∑𝑛𝑖=1 ∝𝑖 = 1.
В методе равномерной оптимизации, который является частным
случаем аддитивной свертке, весовые коэффициенты берутся равными друг
другу∝1 =∝2 = ⋯ = ∝𝑛 .
Иногда оказывается более удобным другой подход к определению
весовых коэффициентов ∝𝑖 , их соответствие определяется с помощью
таблицы 1:
73
Таблица 1. - Таблица относительной важности критериев
Относительная важность
∝𝑖
1
Равная важность сравниваемых требований.
3
Умеренное (слабое) превосходство одного над другим.
5
Сильное (существенное) превосходство.
7
Очевидное превосходство.
8
Абсолютное (подавляющее) превосходство.
2, 4, 6, 8
Промежуточные решения между двумя соседними
оценками.
Мультипликативная свёртка
Мультипликативная свёртка базируется на принципе справедливой
компенсации относительных изменений частных критериев. При этом,
(𝐴𝑖 ),
суперкритерий имеет вид:𝐹(𝐴𝑖 ) = ∏𝑛𝑖=1 𝑓 ∝𝑖
(20)
𝑖
∝𝑖
∏𝑛𝑖=1 𝑓 𝑖 (𝐴𝑖 )произведение частных критериев𝑓𝑖 , каждый из которых
возведен в степень∝𝑖 . При этом сумма весовых коэффициентов ∝𝑖 должна
быть равна единице ∑𝑛𝑖=1 ∝𝑖 = 1 , а каждый из весовых коэффициентов
должен быть не отрицательной величиной ∝𝑖 ≥ 0.
При использовании мультипликативных критериев не требуется
нормировка частных критериев, и это является их преимуществом.
Выбор между аддитивными и мультипликативными критериями
определяется важностью учета абсолютных или относительных изменений
значений частных критериев.
Агрегирование частных критериев
Если компенсация значений одних показателей эффективности
другими недопустима, то используют функции агрегирования вида:
𝐹(𝐴𝑖 ) = 𝑒𝑥𝑡𝑟𝑖 (∝𝑖 𝑓𝑖 (𝐴𝑖 ))
(21)
Для каждого частного критерия, находится его нормированное
значение и умножается на весовой коэффициент. А потом из всех
полученных величин выбирается либо максимальное, либо минимальное
значение.
Если первые m показателей надо увеличить, а остальные – уменьшить,
то используют функцию агрегирования вида:
∝
𝐹(𝐴𝑖 ) =
𝑖
∏𝑚
𝑖=1 𝑓𝑖 (𝐴𝑖 )
𝑝
∝
∏𝑖=1 𝑓𝑖 𝑖 (𝐴𝑖 )
(22)
В числители находятся произведение тех критериев, значение которых
нам надо максимизировать, а в знаменателе находятся произведение тех
критериев, значение которых нам надо минимизировать. И поэтому мы
получаем новый критерий, который нам надо будет максимизировать.
74
Методы свёртывания критериев широко используются в решение задач
многокритериальной оптимизации. Однако они имеют также проблемы и
недостатки. В частности трудно обосновать выбор метода свёртывания
критериев, а от выбора метода часто зависит получаемый результат. Другим
недостатком
является
трудность
обоснование
выбора
весовых
коэффициентов, часто для этого привлекается эксперты, проводятся опросы,
потом обрабатываются полученные результаты, однако это требует много
времени и затраты других ресурсов. Еще одна проблема связана с тем, что
эти методы, как правила дает возможность компенсировать малые значения
одних критериев большими значениями других, что часто бывает
неприемлемо для конкретных решений.
Пример 1. Решить ЗМО методом свёртывания критериев
Условия задачи: в ЗМО известны три критерия оптимизации в
качестве функций от 3-х независимых переменных x1, x2, x3 (23):
𝑓1 = 4𝑥1 + 2𝑥2 -6𝑥3 →max;
𝑓2 = 5𝑥1 + 2𝑥2 -3𝑥3 →min;
(23)
𝑓3 = 3𝑥1 + 3𝑥2 +2𝑥3 →max.
Критерии необходимо оптимизировать в рамках условий-ограничений
(24)
𝑥1 + 2𝑥2 + 2𝑥3 ≥ 4
2𝑥 − 𝑥2 + 𝑥3 ≤ 10
(24)
{ 1
𝑥1 + 2𝑥2 ≤ 17
𝑥1 , 𝑥2 … 𝑥𝑛 ≥ 0
Требуется определить значения переменных x1, x2, x3при которых
значения первого и третьего критериев будут максимальными, а значение
третьего критерия минимально.
Перед тем как преобразовать (свернуть) три критерия в один
суперкритерий, необходимо привести их в однородном состоянии, то есть
они все должны стремиться к максимальному или минимальному своему
значению. Так как все критерии линейно зависимы от переменных x1, x2, x3,то
для того, чтобы устремить критерийf2кмаксимумудостаточно перед
коэффициентами переменных в f2поменять знаки на противоположные,
получим:
𝑓2 = −5𝑥1 − 2𝑥2 + 3𝑥3 →max.
После этого суммировать частные критерииf1 , f2 , f3в один супер
критерий (𝐹ск ),
𝑓1 = 4𝑥1 + 2𝑥2 -6𝑥3 →max;
𝑓2 = −5𝑥1 − 2𝑥2 +3𝑥3 →max;
𝑓3 = 3𝑥1 + 3𝑥2 +2𝑥3 →max.
𝐹ск = 2𝑥1 + 3𝑥2 - 𝑥3 →max.
При этом нужно учитывать и весовые коэффициенты∝𝑖 ≥ 0, i = 1,3
сумма которых должна быть = 1. Весовые коэффициенты распределить по
важности частных критериев f1 , f2 , f3.Пусть весовые коэффициенты по
важности распределятся следующим образом: ∝1 =0,5; ∝2 =0,2; ∝3 = 0,3.
75
Тогда 𝐹ск , с учётом весовых коэффициентов будет выглядеть так (25):
𝐹ск = 0,5 ∗ 2𝑥1 + 0,2 ∗ 3𝑥2 - 0,3 ∗ 𝑥3 →max,
(25)
или окончательно (26)
𝐹ск = 𝑥1 + 0,6𝑥2 - 0,3𝑥3 →max,
(26)
Далее ЗМО решается с использованием ППП Excel, как указано выше в
п.3.1.3. Решение задач линейного программирования с применением ресурса
ЭВМ, пример 1 (рисунки 16,17).
Рисунок 16 – Результат ввода данных в «Мастер функций»
Рисунок 17 – Результаты решения ЗМО через «Поиск решений».
На основании результатов поиска решений в ППП Excel (рисунок 17) по
ЗМО можно сделать выводы: при поиске оптимального решения ЗМО, в
которой необходимо учесть зависимость 3 критериев f1 , f2 , f3 от переменных
x1, x2, x3в заданных условиях их ограничений (24),возможно достигнуть
максимального результата в 10,28 условных единиц, при значениях
переменных:x1= 7,4, x2= 4,8, x3= 0.
С математической точки зрения не существует идеального способа или
метода решения многокритериальных задач оптимизации. Тем не менее, эти
методы помогают подготовить всю необходимую для принятия решения
информацию таким образом, чтобы помочь лицам принимающее решение
76
максимально точно разобраться в ситуации и принять наиболее
обоснованное решение [4].
Формализовать и решить самостоятельно типовую практическую
задачу многокритериальной оптимизации п.3.2.2. пример 3, методом
свёртывания критериев с применением ППП Excel. Быть готовым своё
решение пояснить на практическом занятии по дисциплине.
2.4. Математические модели СППР в условиях неопределенности, риска
и конфликтных ситуаций
2.4.1. Особенности принятия решений в условиях
неопределенности исходных данных
Постановка задачи
В изложенных выше методах по поиску оптимальных решений в
однокритериальных и в многокритериальных задачах исходные данные, как в
составе функций цели, так и в составе систем условий-ограничений были
заданы конкретными аналитическими математическими выражениями, то
есть в условиях их определенности. Однако, как правило, большинство
реальных инженерных задач содержит в том или ином виде
неопределенность. Можно даже утверждать, что решение задач с учетом
разного вида неопределенностей является общим случаем, а принятие
решений без их учета – частным случаем. Однако, из-за концептуальных и
методических трудностей в настоящее время не существует единого
методологического подхода к решению таких задач. Тем не менее, накоплено
достаточно большое число методов формализации постановки и принятия
решений с учетом неопределенностей. При использовании этих методов
следует иметь в виду, что все они носят рекомендательный характер и выбор
окончательного решения всегда остается за человеком (ЛПР).
В прикладном научном направлении математики – «Исследование
операций» принято различать три типа неопределенностей [7]:
1) неопределенность целей;
2) неопределенность наших знаний об окружающей обстановке и
действующих в данном явлении факторах (неопределенность природы);
3) неопределенность действий активного или пассивного партнера или
противника.
В приведенной выше классификации тип неопределенностей
рассматривается с позиций того или иного элемента математической модели.
Так, например, неопределенность целей отражается при постановке задачи на
выборе либо отдельных критериев, либо всего вектора полезного эффекта. С
другой стороны, второй и третий типы неопределенностей влияют в
основном, на составление целевых функций, условий-ограничений и выбор
методов принятия решения. Отдельные методы решения подобных задач в
77
условиях определенности и при линейной зависимости переменных были
рассмотрены в настоящем пособии выше.
Неопределенности всегда надо учитывать с точки зрения отношения их
к случайности. По этому признаку можно различать:
1) Стохастическую(вероятностную) неопределенность, когда
неизвестные факторы статистически устойчивы и поэтому представляют
собой обычные объекты теории вероятностей – случайные величины (или
случайные функции, события и т.д.). При этом должны быть известны или
определены при постановке задачи все необходимые статистический
характеристики (законы распределения и их параметры).Примером таких
задач могут быть, в частности, система технического обслуживания и
ремонта любого вида техники, система организации ухода и т.д.
2) Другим
крайним
случаем
может
быть
неопределенность нестохастического вида,
при
которой
никаких
предположений о стохастической устойчивости не существует.
3) Наконец,
можно
говорить
о
промежуточном
типе
неопределенности, когда решение принимается на основании каких-либо
гипотез о законах распределения случайных величин. При этом ЛПР должен
иметь в виду опасность несовпадения его результатов с реальными
условиями. Эта опасность несовпадения формализуется с помощью
коэффициентов риска, которые характеризуют ситуации риска – ситуации с
неполной неопределенностью, то есть когда ситуации дополняются
некоторыми сведениями о действующих факторах, в частности, знанием
законов распределения описывающих их случайных величин. Принятие
решений в условиях риска может быть основано на одном из следующих
критериев:
– критерий ожидаемого значения;
– комбинации ожидаемого значения и дисперсии;
– известного предельного уровня;
– наиболее вероятного события в будущем.
Процесс принятия решений в задачах с неполной информацией делится
на две группы:
1) без использования численных значений вероятностей исходов, то
есть в условиях стохастической неопределенности;
2) с использованием численных значений вероятностей исходов, когда
параметры модели считаются случайными величинами с известными
законами распределения, то есть в условиях риска.
Такие задачи относят к теории игр и называют также играми с
природой, где один игрок — лицо принимающее решение, а второй —
внешние факторы или обстоятельства, к которым можно отнести и погоду (в
общем случае принято называть как «факторы (состояния) природы»).
Принятию решения предшествует количественный анализ, при котором
определяются возможные варианты решения проблемы, возможные исходы
каждого решения и их оценка. Рассмотрим примеры решения задач для ЛПР
78
с использованием в составе СППР методов по каждому из перечисленных
выше признаков случайности.
2.4.2. Методы принятия решений при стохастической
(вероятностной) неопределенности
В случае стохастической неопределенности у ЛПР имеется полная
информация о степени возможности тех или иных исходов операции для
каждой стратегии1 в виде вероятностного распределения на множестве
возможных результатов [7]. В качестве результата может быть например,
математическое ожидание результата, или дисперсия результата. Однако, как
показывает практика, выбор на основе таких характеристик не всегда
согласуется с личными представлениями ЛПР о наилучшей альтернативе. В
частности, это объясняется также и тем, что, описывая задачи с риском, ЛПР
редко использует такие теоретические понятия, как «распределение
вероятностей», «случайная величина», «квантиль2» и другие. Вместо них
человек обычно оперирует такими малоформализуемыми понятиями, как
«шансы на выигрыш», «возможность неудачи», «тяжесть последствий» и
другие. На основе таких последних суждений можно точнее определять
сначала эффективные, а при необходимости — и наилучшие альтернативы
среди вариантов стратегий.
В этой связи хорошо согласуется с данными практики следующая
вербальная формулировка принципа стохастического доминирования: тот
вариант решения лучше, для которого выше вероятность получения более
предпочтительного результата.
Другими словами, для того чтобы установить, какой из двух вариантов
— а или b — решения лучше, ЛПР просто необходимо последовательно
"перебрать" все возможные текущие значения Р(а) и Р(b) результата и
проверить, какая из средних вероятностей больше: P(a) или P(b), тот вариант
и будет более предпочтительным (оптимальным).
В условиях неопределенности вероятностное распределение,
соответствующее состояниям природы, неизвестно. Поэтому выбор
стратегии игроком принимается на основе ряда критериев:
1. Критерий Лапласа.
2. Максиминный (минимаксный) критерий Вальда.
3. Максимаксный критерий.
4. Критерий Гурвица.
5. Критерий Сэвиджа.
Вариант действий на основе принятого ЛПР решения.
в математической статистике — значение, которое заданная случайная величина не превышает с
фиксированной вероятностью. Если вероятность задана в процентах, то квантиль называется процентилем
или перцентилем.
1
2
79
Критерий Лапласа опирается на следующее соображение: так как
распределение вероятностей состояний среды неизвестно, они принимаются
1
равными, то естьР(𝑠1 ) = Р(𝑠2 ), = ⋯ = Р(𝑠𝑗 ) = ⋯ = Р(𝑠𝑛 ) = ,
(1)
𝑛
где 𝑠1 , 𝑠2 , … 𝑠𝑗 … . 𝑠𝑛 – случайные состояния природы.
Принятие решения в условиях стохастической неопределенности
можно описать с помощью матрицы «выигрышей» (или «потерь»)
c m возможными действиями (стратегиями) 𝑎1 , 𝑎2 , … 𝑎𝑖 … 𝑎𝑚 иn возможными
случайными состояниями природы 𝑠1 , 𝑠2 , … 𝑠𝑗 … . 𝑠𝑛 , которая имеет вид (2):
ℎ11 ℎ12 … ℎ1𝑛
ℎ ℎ … ℎ2𝑛
| 21 22
| ,
(2)
… … … …
ℎ𝑚1 ℎ𝑚2 … ℎ𝑚𝑛
где ℎ𝑖𝑗 = ℎ(𝑎𝑖 , 𝑠𝑗 )представляется как выигрыш, связанный сi-ой
стратегией ЛПР (игрока) иj-м состоянием природы.
Выбор наилучшей стратегии по Критерий Лапласа выбирается на
основе критерия максимизации выигрыша, если ℎ𝑖𝑗 = ℎ(𝑎𝑖 , 𝑠𝑗 )задает
выигрыш (3):
1
max | ∑𝑛𝑗=1 ℎ (𝑎𝑖 , 𝑠𝑗 )|
(3)
𝑛
𝑎𝑖
или минимизации потерь, если ℎ𝑖𝑗 = ℎ(𝑎𝑖 , 𝑠𝑗 )задает потерю(4):
1
𝑎𝑖
min | ∑𝑛𝑗=1 ℎ (𝑎𝑖 , 𝑠𝑗 )|
(4)
𝑛
При
решении
задач,
соответствующие таблицы:
наряду
cматрицами
рассматривают
Таблица 1. Исходная матрица в условиях
неопределенности
…
…
…
…
…
…
…
…
…
Пример 1. Студент, который обычно получает хорошие отметки
благодаря тому, что имеет возможность повторить материал в ночь перед
экзаменом. Перед завтрашним экзаменом студент столкнулся с небольшой
проблемой. Его сокурсники организовали на всю ночь вечеринку, в которой
он хочет участвовать. Студент имеет три альтернативы:𝑎1 — участвовать в
80
вечеринке всю ночь;𝑎2 — первую половину ночи участвовать в вечеринке, а
вторую половину — учиться; 𝑎3 — учиться всю ночь.
Профессор, принимающий завтрашний экзамен, непредсказуем, и
экзамен может быть: 𝑠1 – легким;
𝑠2 – средним или 𝑠3 – трудным. В
зависимости от сложности экзамена и времени, затраченного студентом на
повторение, можно ожидать следующие баллы (таблица 2).
Таблица 2 – Сопоставление вариантов действий студента и сложности
экзамена
85
60
40
92
85
81
100
88
82
Требуется – рекомендовать студенту, какой выбор он должен сделать.
Решение. Очевидно, что в данном случае необходимо воспользоваться
формулой (3), чтобы максимизировать полученный балл. Рассчитаем
ожидаемые значения баллов для каждой стратегии студента (таблица 3):
1
𝑀𝑖 = ∑3𝑗=1 ℎ(𝑎𝑖 𝑠𝑗 )
(3)
3
3
1
1
185
𝑀1 = ∑ ℎ(𝑎1 𝑠𝑗 ) = (85 + 60 + 40) =
≈ 62 балла
3
3
3
𝑗=1
3
1
1
258
𝑀2 = ∑ ℎ(𝑎1 𝑠𝑗 ) = (92 + 85 + 81) =
≈ 86 баллов
3
3
3
𝑗=1
3
1
1
270
𝑀3 = ∑ ℎ(𝑎1 𝑠𝑗 ) = (100 + 88 + 82) =
≈ 92 балла
3
3
3
𝑗=1
Таблица 3 – Средняя бальная оценка вариантов действий
М
85
60
40
62
92
85
81
86
100
88
82
92
Вывод: по критерию Лапласа студенту рекомендуется учиться всю
ночь и он может набрать 92 балла.
Максиминный (минимаксный) критерий Вальда, или критерий
«осторожного наблюдателя», когда предполагается, что внешняя среда
("природа") находится в самом невыгодном положении для ЛПР. Поэтому
критерий сводится к выбору наилучшей альтернативы из наихудших,
если ℎ𝑖𝑗 = ℎ(𝑎𝑖 , 𝑠𝑗 )задает прибыль (максиминный критерий) (4):
81
𝑎𝑖
max |min ℎ (𝑎𝑖 , 𝑠𝑗 )|
(4)
𝑠𝑗
или к выбору наихудшей альтернативы из наилучших, если ℎ𝑖𝑗 =
ℎ(𝑎𝑖 , 𝑠𝑗 )задает потери (минимаксный критерий) (5):
𝑎𝑖
min |max ℎ (𝑎𝑖 , 𝑠𝑗 )|
(5)
𝑠𝑗
Применим критерии к предыдущей задаче, согласно (4), получим
(таблица 4):
max|40,81,82| = 82
𝑎𝑖
Таблица 4 – Бальная оценка вариантов действий при максиминном
критерии Вальда
85
60
40
40
92
85
81
81
100
88
82
82
Вывод: максиминный критерий Вальда предлагает студенту
стратегию𝑎3 , оценивая при этом шансы студента на получение 82 баллов,
при условии, что он будет учиться всю ночь.
Теперь применим к той же задаче, минимаксный критерий Вальда,
согласно (5), получим (таблица 5):
min|85,92,100| = 85 баллов
𝑎𝑖
Таблица 5 – Бальная оценка вариантов действий при минимаксном
критерии Вальда
max
𝑠𝑗
85
60
40
85
92
85
81
92
100
88
82
100
Вывод: минимаксный критерий Вальда предполагает, что если студент
будет участвовать в вечеринке всю ночь, согласно стратегии𝑎1 , то его шансы
при сдаче экзамена оцениваются на 85 баллов.
Максимаксный критерий называют также критерием «здорового
оптимиста», так как предполагается, что внешняя среда ("природа")
находится в самом выгодном положении для ЛПР. Поэтому критерий
сводится к выбору наилучшей альтернативы из наилучших, если ℎ𝑖𝑗 =
ℎ(𝑎𝑖 , 𝑠𝑗 )задает выигрыш (6):
82
𝑎𝑖
max |max ℎ (𝑎𝑖 , 𝑠𝑗 )|
(6)
𝑠𝑗
Применим критерий к предыдущей задаче, согласно (6), получим
(таблица 6)
max|85,92,100| = 100
𝑎𝑖
Таблица 6 – Бальная оценка вариантов действий
85
60
40
85
92
85
81
92
100
88
82
100
Вывод:
согласно
максимаксного
критерия, шансы
студента
оцениваются на 100 баллов, при условии, что он будет учиться всю ночь.
Критерий Гурвица предполагает, что внешняя среда ("природа")может
находиться в наилучшем состоянии с вероятностью∝ , а в наихудшем
состоянии с вероятностью1- ∝, где 0≤∝≤1.
Еслиℎ(𝑎𝑖 , 𝑠𝑗 ) задает выигрыш, тогда решение по критерию Гурвица
производится по условию (7):
min |∝ max ℎ (𝑎𝑖 , 𝑠𝑗 ) + (1−∝) min ℎ (𝑎𝑖 , 𝑠𝑗 )|
𝑎𝑖
(7)
𝑠𝑗
𝑠𝑗
Если ℎ(𝑎𝑖 , 𝑠𝑗 ) задает потери, тогда решение по критерию Гурвица
производится по условию (8):
min |∝ min ℎ (𝑎𝑖 , 𝑠𝑗 ) + (1−∝) max ℎ (𝑎𝑖 , 𝑠𝑗 )|
𝑎𝑖
𝑠𝑗
(8)
𝑠𝑗
Параметр ∝ называют показателем оптимизма, так как выбором этого
параметра можно задавать степень оптимизма. При∝ = 1критерий Гурвица
переходит в критерий оптимиста, а при∝ = 1 – в критерий пессимиста.
Рассмотрим решение предыдущей задачи с уровнем оптимизма∝ = 0,8.
Ожидаемое значения баллов для стратегии𝑎1 , согласно (9):
min |∝ max ℎ (𝑎𝑖 , 𝑠𝑗 ) + (1−∝) min ℎ (𝑎𝑖 , 𝑠𝑗 )|
𝑎𝑖
(9)
𝑠𝑗
𝑠𝑗
∝ max ℎ (𝑎𝑖 , 𝑠𝑗 ) + (1−∝) min ℎ (𝑎𝑖 , 𝑠𝑗 ) = 0,8 ∗ 85 + 0,2 ∗ 40 = 76
𝑠𝑗
𝑠𝑗
Аналогично рассчитаем значения для остальных стратегий. Результаты
расчетов при различных∝ сведены в таблицу 7:
Таблица 7 – Бальная оценка студента по показателям оптимизма
85
60
40
76
62,5
49
92
85
81
89,8
86,5
83,2
83
100
88
82
96,4
91
85,6
max:
96,4
91
85,6
Вывод: наилучшим вариантом действий студента по критерию Гурвица
будет выбор стратегии 𝑎3 – учиться всю ночь, тогда он при любом из 3-х
показателей оптимизма (согласно таблицы 7) получит максимально
возможное количество баллов.
Критерий Сэвиджа строится на основе матрицы "потерь"
𝑔(𝑎𝑖 , 𝑠𝑗 ), которая получается из матрицы платежей (выигрышей или
проигрышей) следующим образом (10):
max|ℎ(𝑎𝑘 , 𝑠𝑗 ) − ℎ(𝑎𝑖 , 𝑠𝑗 )|, если ℎ(𝑎𝑖 , 𝑠𝑗 ) − выигрыш
𝑎
𝑔(𝑎𝑖 , 𝑠𝑗 ) = | 𝑘
(10)
|,
ℎ(𝑎𝑖 , 𝑠𝑗 ) − min|ℎ(𝑎𝑘 , 𝑠𝑗 )|, если ℎ(𝑎𝑖 , 𝑠𝑗 ) − проигрыш
𝑎𝑘
Построим матрицу потерь для рассматриваемого выше примера (по
критерию
Гурвица),
где
ℎ(𝑎𝑖 , 𝑠𝑗 )задает
выигрыш.
Поэтому
найдеммаксимальные значения по столбцам (таблица 8):
Таблица 8 – Показатели выигрышей студента
max
85
60
40
92
85
81
100
88
82
100
88
82
Вычтем полученные числа 100, 88, 82 из элементов соответствующих
столбцов, получим матрицу потерь (таблица 9):
Таблица 9 – Матрица потерь по показателям выигрышей
max
15
28
42
8
3
1
0
0
0
100
88
82
К полученной матрице (таблица 9) применяется минимаксный
критерий (11):
𝑎𝑖
min |max ℎ (𝑎𝑖 , 𝑠𝑗 )|
𝑠𝑗
min|42,8,0| = 0
𝑎𝑖
84
(11)
Вывод: согласно критерия Сэвиджа, минимальные потери по баллам
для студента будут обеспечены, если он будет придерживаться стратегии
𝑎3 – будет учиться всю ночь.
2.4.3.Теория игр и игровое моделирование
Основные понятия теории игр
Теория игр - это раздел прикладной математики - исследования
операций, в которой изучается поведение участников конфликтной ситуации
и вырабатываются оптимальные стратегии выбора наилучшего решения для
каждого из них, то есть – математическая теория принятия решения в
конфликтных ситуациях.
Теория игр занимается математическим моделированием ситуации
конфликта и разработкой методов решения задач, возникающих в этих
ситуациях. Она дает возможность выработать оптимальные правила
поведения каждой стороны, участвующей в разрешении конфликтной
ситуации.
Конфликтом (конфликтной ситуацией) называется процесс
столкновения интересов нескольких участвующих сторон. При этом ни одна
из сторон конфликта не может полностью контролировать положение, так
как все участники процесса принимают решение в условиях полной
неопределенности.
Конфликт является антагонистическим, если интересы участников
противоположны
и
неантагонистическим,
если
интересы
не
противоположны.
Основной задачей теории игр является не описание, а разрешение
конфликтов, т.е. построение компромиссных взаимовыгодных решений,
которые полностью или хотя бы частично согласовывают интересы всех
взаимодействующих сторон.
Целью теории игр является выработка рекомендаций по разумному
поведению участников конфликта (определение оптимальных стратегий
поведения игроков).
Предметом изучения теории игр являются конфликтные ситуации. Для
анализа
конфликтных
ситуаций
прибегают
к
математическому
моделированию.
Математическая модель – это совокупность математических
соотношений.
Важнейшим этапом моделирования является этап построения
математической модели.
Построение математической модели – это этап, на котором задача
исследователя заключается в том, чтобы все характеристики свойственные
данному процессу, проблеме, все связи между ними суметь записать в виде
85
конкретных математических зависимостей и отношений (функций,
уравнений, неравенств и т.д.), то есть суметь формализовать данную
проблему.
Формальное описание принятия решений в теории игр удобно
разбить на две части:
1) описание
конфликтной
ситуации,
путём
построения
математической модели конфликтной ситуации через описание субъектов,
принимающих решения, их возможностей и интересов;
2) описание правил рационального поведения игроков на основе
выбора ими критериев оптимальности (изложенных выше).
Математическая модель конфликта и критерии оптимальности дают
полное описание принятия решений в условиях конфликта. Оптимальность и
не оптимальность того или иного исхода конфликта зависит от интересов и
возможностей его участников. В этом смысле критерий оптимальности
является функцией игры. Можно рассматривать различные критерии
оптимальности, но если один из них выбран, то для каждой игры можно
однозначно указать множество её рациональных исходов.
Игра (объект исследования в теории игр) – упрощенная
математическая модель конфликтной ситуации, отличающаяся от реального
конфликта, тем, что ведется по определенным правилам на основании
которых игроки применяют совокупность целенаправленных действий,
направленных на достижение собственного выигрыша (цели) в условиях
конфликта.
Игрок – это представитель одной из сторон конфликта, который в
данной ситуации имеет право принимать решения. При этом сторона
конфликта может состоять, как из одного лица, так и из группы лиц, но не
каждый участник, может принимать решения, поэтому не каждый член
считается игроком.
Для построения модели конфликтной ситуации, прежде всего, должны
быть сформулированы правила игры.
Правила игры - совокупность условий, на основе которых
определяются возможные варианты действий игроков, то есть множество
стратегий, которыми владеет каждый игрок. Правилами игры, так же
устанавливаются последовательность ходов, объем информации о поведении
сторон, которой может обладать каждый участник игры, результат игры в
зависимости от сложившейся ситуации, конец игры, когда некоторая
последовательность ходов уже сделана, и больше ходов делать не
разрешается.
Непосредственный анализ конфликтной ситуации дает возможность
установить множество всех возможных вариантов действий каждой стороны
конфликта.
В игре каждый игрок делает выбор, то есть из всего множества
вариантов действия он выбирает один, который, по его мнению, является
лучшим в данной конкретной ситуации и осуществляет его с помощью хода.
86
Ход является действием одного из игроков в какой-то момент игры.
Ход делается каждым игроком на определенном этапе игры. Этап
определяется правилами игры, при этом, если возможно учитывается
информация о прошлом развитии игры.
Ход - выбор одного из возможных вариантов действий в процессе
игры. Ходы делятся на личные и случайные.
Личным называется ход, когда игрок сам сознательно выбирает из
множества возможных вариантов действий один конкретный вариант и
осуществляет его (например, любой ход в игре шашки).
Случайным называется ход, если выбор из множества возможных
вариантов действий делается не игроком, а каким-либо механизмом
случайного выбора (например, по результатам бросания монеты).
Дискретный ход является результатом выбора из заданного,
ограниченного числа альтернатив (известно число альтернатив и известны
численные характеристики этих альтернатив).
Непрерывный ход является результатом непрерывного во времени
выбора из неограниченного числа альтернатив.
Агрессивно-нелогичный ход – сознательное снижение собственного
выигрыша, приводящее к ещё большим потерям у противника. Цель такого
поведения: вывести противника из игры. Нелогичность здесь в том, что
противник не ожидает, что мы поступим себе во вред.
Партией называется множество всех ходов, сделанных игроками от
начала до конца игры.
Стратегия – упорядоченная по шагам игры совокупность тактик
игрока при переходе из начального в конечное состояние процесса игры. При
этом последовательность ходов зависит от информации о ходах другого
(других) игрока (игроков) и от информации о случайно изменяющихся
параметрах, законы распределения которых, считаются заданными.
В теории игр стратегия игрока в игре или деловой ситуации – это
полный план действий при всевозможных ситуациях, способных возникнуть.
Стратегия определяет действие игрока в любой момент игры и для
каждого возможного течения игры, способного привести к каждой ситуации.
То есть стратегия - это совокупность правил, которые однозначно
указывают игроку, какой выбор он должен сделать при каждом ходе в
зависимости от ситуации, сложившейся в результате проведения игры.
Тактика – локализованный вариант реализации выбранной стратегии.
Примечание. В одноходовой игре понятие тактики и стратегии
совпадают.
При неоднократном повторении одноходовой игры появляется
возможность формирования стратегии.
Чистая стратегия даёт полную определённость, каким образом игрок
продолжит игру. В частности, она определяет результат для каждого
возможного выбора, который игроку может придётся сделать.
87
Пространством стратегий называют множество всех чистых стратегий,
доступных данному игроку.
Смешанная стратегия является указанием вероятности каждой
чистой стратегии. Это означает, что игрок выбирает одну из чистых
стратегий в соответствии с вероятностями, заданными смешанной
стратегией.
Выбор смешанной стратегии осуществляется перед началом каждой
игры и не меняется до её конца.
Каждая чистая стратегия является частным случаем смешанной, когда
вероятность одной из чистых стратегий равна единице, а остальных
возможных чистых стратегий - нулю.
Стратегия оптимальная, если она обеспечивает при многократном
повторении игры максимально возможный средний выигрыш или
минимально возможный средний проигрыш данному игроку, независимо от
стратегий, применяемых другими игроками.
Если чистая стратегия входит в оптимальную смешанную стратегию с
отличной от нуля вероятностью, то она называется активной.
Справедлива теорема об активных стратегиях: если один из игроков придерживается своей оптимальной смешанной стратегии, то
выигрыш остается неизменным и равным цене игры v, если второй игрок не
выходит за пределы своих активных стратегий.
Справедлива также теорема теории игр — теорема Неймана –
каждая конечная игра имеет по крайней мере одно оптимальное решение,
возможно, среди смешанных стратегий.
Классификация игр
Классификация игр проводится:
1) по количеству игроков:
– парные игры (двух игроков);
– коалиционные игры (n-игроков);
2) по количеству стратегий:
– конечные (если в игре все игроки имеют конечное число возможных
стратегий);
– бесконечные (если хотя бы один из игроков имеет бесконечное
количество возможных стратегий).
3) по характеру взаимодействия игроков:
– бескоалиционные: игроки не имеют права вступать в соглашения,
образовывать коалиции;
– коалиционные – игроки могут вступать в коалиции.
4) по характеру выигрышей игры делятся на:
− антагонистические (игры с нулевой суммой – сумма выигрышей всех
игроков равна нулю);
− не антагонистические (игры с ненулевой суммой – игры с
88
«природой»).
5) по количеству информации, имеющейся у игроков относительно
прошлых ходов, игры подразделяются на игры:
– кооперативные (допускается возможность предварительных
переговоров между игроками; коалиции наперед определены);
– не кооперативные (с полной информацией – имеется вся информация
о предыдущих ходах (шашки, шахматы и другие); с неполной информацией);
– стратегические игры – это игры в условиях полной неопределенности
(антагонистические игры);
– статистические игры – это игры с частичной неопределенностью
(игры с «природой). В статистической игре всегда имеется один активный
игрок, имеющий свои стратегии и цели. Другим игроком (пассивным, не
преследующим своих целей) является «природа» – этот «игрок» реализует
свои стратегии случайным образом, причем вероятность реализации того или
иного состояния можно оценить с помощью статистического эксперимента.
6) по виду функций выигрыша игры делятся на:
− матричные;
− биматричные;
− непрерывные;
− выпуклые;
− сепарабельные.
Матричная игра – это конечная игра двух игроков с нулевой суммой, в
которой задаётся выигрыш игрока 1 в виде матрицы (строка платёжной
матрицы соответствует номеру применяемой стратегии игрока 2, столбец
платёжной матрицы – номеру применяемой стратегии игрока 2; на
пересечении строки и столбца матрицы находится выигрыш игрока 1,
соответствующий применяемым стратегиям). Для матричных игр доказано,
что любая из них имеет решение и оно может быть найдено путём сведения
игры к задаче линейного программирования.
Биматричная игра – это конечная игра двух игроков с ненулевой
суммой, в которой выигрыши каждого игрока задаются матрицами отдельно
для соответствующего игрока (в каждой матрице строка соответствует
стратегии игрока 1, столбец – стратегии игрока 2, на пересечении строки и
столбца в первой матрице находится выигрыш игрока 1, во второй матрице –
выигрыш игрока 2). Для биматричных игр также разработана теория
оптимального поведения игроков, однако решать такие игры сложнее, чем
обычные матричные.
Непрерывной считается игра, в которой функция выигрышей каждого
игрока является непрерывной в зависимости от стратегий. Доказано, что
игры этого класса имеют решения, однако не разработано практически
приемлемых методов их нахождения.
Если функция выигрышей является выпуклой, то такая игра
называется выпуклой. Для них разработаны приемлемые методы решения,
состоящие в отыскании чистой оптимальной стратегии (определённого
89
числа) для одного игрока и вероятностей применения чистых оптимальных
стратегий другого игрока.
Сепарабельная (разделимая) игра – это игра, функция выигрышей
которой может быть представлена в виде суммы произведений функций от
одного аргумента.
Парная игра с нулевой суммой является антагонистической, так как
выигрыш одного игрока равен проигрышу второго, а следовательно цели
этих игроков прямо противоположны.
Конечная парная игра с нулевой суммой является матричной игрой.
Такая игра описывается платежной матрицей, в которой задаются
выигрыши первого игрока. Номер строки матрицы соответвует номеру
применяемой стратегии первого игрока, столбец - номеру применяемой
стратегии второго игрока; на пересечении строки и столбца находится
соответствующий выигрыш первого игрока (проигрыш второго игрока).
Конечная
парная
игра
с
ненулевой
суммой
называется биматричной игрой. Такая игра описывается двумя платежными
матрицами, каждая для соответствующего игрока.
Особенности антагонистических игр
Таким образом, характерной особенностью любого конфликта является
то, что ни одна из участвующих сторон не знает заранее точно и полностью
всех своих возможных решений, а также и другие стороны, их будущее
поведение и, следовательно, каждый вынужден действовать в условиях
неопределенности.
Неопределенность исхода может быть обусловлена как сознательными
действиями активных противников, так и несознательными, пассивными
проявлениями, например, стихийных сил природы: дождя, солнца, ветра,
лавины и т.п. В таких случаях исключается возможность точного
предсказания исхода.
В настоящем параграфе учебного пособия рассматривается
конфликтная ситуация между двумя активными игроками, преследующими
цели
–
сознательно
и
целенаправленно
нанести
поражение
противоположенной стороне, добившись победы (обеспечив себе
максимальный выигрыш к исходу игры), что соответствует целям игроков в
антагонистических играх.
Конфликтная ситуация будет антагонистической, если увеличение
выигрыша одной из сторон на некоторую величину приводит к уменьшению
выигрыша другой стороны на такую же величину и наоборот, поэтому такой
тип игр ещё иначе называют игры с нулевой суммой.
Антагонизм интересов порождает конфликт, а совпадение интересов
сводит игру к координации действий (кооперации).
Примерами
конфликтной
ситуации
являются
ситуации,
складывающиеся во взаимоотношениях покупателя и продавца; в условиях
90
конкуренции различных фирм; в ходе боевых действий и другие.
При рассмотрении особенностей антагонистических игр как
математической модели необходимо учесть следующие ограничения им
присущие:
1) В игре имеет место полная ("идеальная") разумность противников
(игроков с обеих сторон). В реальном же конфликте, при выборе игроком
своей оптимальной стратегии, он анализируя обстановку может рассчитывать
на "глупость" противника, или на незнание им реальной ситуации о силах
сторон, после чего воспользоваться этим и добиться победы.
2) Еще одним недостатком теории игр является то, что по условиям
игры каждому из игроков известны все возможные действия (стратегии)
противника, заданные в форме платёжной матрицы, неизвестно лишь то,
какой именно из них стратегией противник воспользуется в данной партии.
То есть считается, что у игроков – участников конфликта имеются
одинаковые по содержанию платёжные матрицы, в рамках значений которых
они и могут совершать свои личные ходы. В реальном же конфликте, это
обычно не так: перечень всех возможных стратегий противнику как раз и
неизвестен, и тогда наилучшим решением в конфликтной ситуации будет
именно выход за пределы известных противнику стратегий и за счёт этого
нанесение ему поражения.
3) Теория антагонистических игр не включает элементов риска,
которые, как правило, бывают в реальных конфликтах. Она определяет
наиболее осторожное, "перестраховочное" поведение участников конфликта.
4) Кроме того, в теории игр имеют место оптимальные стратегии по
одному показателю (критерию). В практических же ситуациях часто
приходится принимать во внимание не один, а несколько числовых
критериев. Стратегия, оптимальная по одному показателю, может быть
неоптимальной по другим.
5) Условия антагонистических игр можно упростить:
− если в платежной матрице есть повторяющиеся стратегии за одну из
сторон (или за обе вместе), то необходимо из платежной матрицы
вычеркнуть повторяющиеся элементы матрицы (целиком столбец и\или
целиком строку);
− если в платежной матрице есть заведомо невыгодные стратегии для
одной из сторон участвующих в игре, то эти стратегии также вычеркиваются
(целиком столбец и\или строка).
− после выполнения действий по упрощению платёжной матрицы,
заново внимательно просмотреть содержимое платежной матрицы и при
необходимости повторить действия по её упрощению.
Упрощение платежной матрицы может позволить в некоторых случаях
свести сложную игру к виду матрицы 2x2 и решить ее геометрическим
методом за обе стороны участвующие в разрешении конфликтной ситуации,
как будет указано ниже.
Сознавая ограничения по п.1-4 нельзя слепо придерживаться
91
рекомендациям, даваемым теорией игр, однако теория игр позволяет всё же
выработать вполне приемлемую стратегию действий ЛПР для многих
реальных конфликтных ситуаций в антагонистических играх.
Решение антагонистических игр
1) Нижняя и верхняя цена игры, решение антагонистических игр с
«седловой» точкой
Рассмотрим парную конечную игру. Пусть игрок А располагает m
личными стратегиями, которые обозначим А1, А2,..., Аm., а игрок В имеется n
личных стратегий, обозначим их В1, В2, ..., Вn. Таким образом, имеет место
игра размерностью m×n. В результате выбора игроками А и В любой пары
стратегий
𝐴𝑖 и В𝑗 (𝑖 = 1,2, … 𝑚; 𝑗 = 1,2, … 𝑛)
(1)
однозначно определяется выигрыш аij игрока А (положительный или
отрицательный) и проигрыш (-аij) игрока В.
Предположим, что значения aij известны для любой пары стратегий {AI,
Bj). Матрица Р = (aij), i = 1, 2, ..., m; j = 1, 2, ..., n, элементами которой
являются выигрыши, соответствующие стратегиям AI и BJ, называется
платежной матрицей или матрицей игры. Общий вид такой матрицы
представлен в таблице. 1.
Строки этой таблицы соответствуют стратегиям игрока А, а столбцы —
стратегиям игрока В.
Bj B1
Ai
A1
A2
...
...
A
m
Таблица 1
B2 ... Bn
а11
а12
...
а1n
а21
...
а22
...
...
...
а2n
...
аm1 аm2 ...
аmn
Задача 1 (Игра "поиск"). Игрок А может спрятаться в одном из двух
убежищ (I и II); игрок В ищет игрока А, и если найдет, то получает 1 ден. ед.
от А, в противном случае платит игроку А 1 ден. ед. Необходимо построить
платежную матрицу игры.
Решение
Для составления платежной матрицы следует проанализировать
поведение каждого из игроков. Игрок А может спрятаться в убежище I —
обозначим эту стратегию через А1 или в убежище II — стратегия А2.
Игрок В может искать первого игрока в убежище I — стратегия В1,
либо в убежище II — стратегия В2. Если игрок А находится в убежище I и
там его обнаруживает игрок В, т.е. осуществляется пара стратегий (А1, В1), то
92
игрок А платит штраф, т.е. а11 = - 1. Аналогично получаем а22 = -1 (А2, В2).
Очевидно, что стратегии (А1, В2) и (А2, В1) дают игроку А выигрыш 1,
поэтому а12 = а21= 1. Таким образом, для игры "поиск" размера 2х2 получаем
платежную матрицу
Р=|
−1 1
|
1 −1
(2)
При выборе стратегии А1 (первая строка матрицы) минимальный
выигрыш равен 1 = min(-l;l) = -1 и соответствует стратегии В1 игрока В.
При выборе стратегии А2 (вторая строка матрицы) минимальный
выигрыш равен 2 = min(l;-l) = -1, он достигается при стратегии В2.
Гарантируя себе максимальный выигрыш при любой стратегии игрока
В, получим нижнюю цену игры – = max(min1,2) = max(-l;-l) = -1, то есть
игрок А может выбирать любую стратегию: А1 или А2, его выигрыш будет -1
и определяется он максиминной стратегией.
Выбирая стратегию В1 (столбец 1), игрок В понимает, что игрок А
ответит стратегией А2, чтобы максимизировать свой выигрыш (проигрыш
игрока В). Следовательно, максимальный проигрыш игрока В при выборе им
стратегии В1 равен 1 = mах(-1; 1) = 1.
Аналогично максимальный проигрыш игрока В (выигрыш А) при
выборе им стратегии В2 (столбец 2) равен 2 = mах(1; -1) = 1.
Таким образом, при любой стратегии игрока А гарантированный
минимальный проигрыш игрока В равен верхней цене игры
=
min(max1,2) = min (1; 1) = 1.
Любая стратегия игрока В является минимаксной. Дополнив табл. 1
строкой j и столбцом i, получим табл.2. На пересечении дополнительных
строки и столбца будем записывать верхнюю и нижнюю цены игр.
Таблица 2
Bj B1
B2
i
Ai
A1 - 1
1
-1
A2
j
1
1
-1
1
-1
-1
1
В задаче 1, верхняя и нижняя цены игры различны.
Если же верхняя и нижняя цена игры совпадают, то общее значение
верхней и нижней цены игры = = ν называется чистой ценой игры, или
просто ценой игры, или «седловой» точкой.
Для игры с «седловой» точкой минимаксные стратегии,
соответствующие цене игры, являются оптимальными стратегиями, а их
совокупность — оптимальным решением, или решением игры. В этом
93
случае игрок А получает максимальный гарантированный (не зависящий от
поведения игрока В) выигрыш ν, а игрок В добивается минимального
гарантированного (вне зависимости от поведения игрока А) проигрыша -ν.
Говорят, что решение игры обладает устойчивостью, т.е. если один из
игроков придерживается своей оптимальной стратегии, то для другого не
может быть выгодным отклоняться от своей оптимальной стратегии.
Задача 2. Рассмотрим игру 3 × 3 с матрицей Р = (aij), i =1, 2, 3; j =1,
2,3 и определим наилучшую среди стратегий А1, А2, А3.
Таблица 3
Bj В1
В2
B3
i
Aj
A1
0,5
0,6
0,8
0,5
A2
0,9
0,7
0,8
0,7
A3
0,7
0,6
0,6
0,6
J
0,9
0,7
0,8
= = 0,7
Гарантируя для игрока А минимальный выигрыш при любой стратегии
игрока В, получим нижнюю цену игры – = max(min1,2) =
max(0,5;0,7;0,6) = 0,7, то есть игрок А может выбирать любую стратегию: А1,
А2, или А3 его выигрыш будет 0,7 и определяется он максиминной
стратегией.
Максимальный же проигрыш игрока В для условий в таблице 3 будет
равен верхней цене игры = min(max1,2) = min (0,9;0,7;0,8) = 0,7.
Таким образом, имеет место «седловая» точка при определении цены
игры, то есть = = 0,7. Это значит, что имеет место решение игры в чистых
стратегиях: игроку А в своей игре невыгодно отклоняться от стратегии А2 , а
игроку В невыгодно отклоняться от стратегии В2 .
Если игра не имеет «седловой» точки, то применение чистых стратегий
не дает оптимального решения игры. Так, в задаче 1 , седловая точка
отсутствует. В таком случае можно получить оптимальное решение, чередуя
чистые стратегии или иначе говоря – получить решение в смешанных
стратегиях SA и SB : ν .
Смешанной стратегией SA игрока A называется применение чистых
стратегий А1, А2,..., Ai, ..., Аm с вероятностями р1, р2, ..., pi,..., рm, причем
сумма вероятностей равна 1.
Смешанные стратегии игрока А записываются в виде матрицы:
𝐴 , 𝐴 … 𝐴𝑖 … 𝐴𝑚
𝑆𝐴 = ( 1 2
),
𝑝1 , 𝑝2 , … 𝑝𝑖 … 𝑝𝑚
или в виде строки SA = (p1,p2,...pi,...,рm,), где сумма вероятностей
появления стратегий равна 1.
94
2) Геометрический метод решения матричных антагонистических
конечных игр размерностью 2× 2
Решение игры размерностью только 2×2 (или путём сведения игры к
такой размерности, за счёт упрощения исходного формата игры) допускает
наглядную геометрическую интерпретацию процесса решения игры.
Решение антагонистической матричной игры 2×2 за игрока А
Пусть игра задана платежной матрицей Р = (aij), i,j = 1, 2. По оси
абсцисс (рис. 1а) отложим единичный отрезок (произвольной длины),
Вертикаль A1(x=0) изображает стратегию А1, причем расстояние от 0 до
правого конца отрезка — это значение вероятности р1 стратегии А1,
расстояние до левого конца — вероятность p2 стратегии А2.
а) Зависимость стратегий игрока А
от стратегии В1
б) Зависимость стратегий игрока А
от стратегии В2
Рисунок 1.– Отображение стратегий на плоскости за сторону А
Аналогично вертикаль A2(x=1) изображает стратегию А2 (рис.1б),
причем расстояние от условного 0 до левого конца отрезка — это значение
вероятности р2 стратегии А2.
На
рисунке
2
представлено
цельное
решение
парной
антагонистической игры 2×2 геометрическим методом.
Рисунок 2. – Демонстрация решения парной матричной антагонистической
игры геометрическим методом за сторону А
Так
как,
при
определении
цены
95
игры
за
сторону
А
ЛПР
руководствуется максиминной стратегией, то есть в данном случае ν =
max(min11,22) – что соответствует подходу при определении
гарантированного выигрыша игрока А, на графике цена игры будет
определяться значением точки перегиба N ломанной линии (выделена
полужирным цветом), которая и соответствует оптимальной смешанной
стратегии SA. Перпендикуляр опущенный из точки N разобьёт единичный
отрезок на две части, которые и определят значения вероятностей участие в
игре чистых стратегий игрока А – значение р1 соответствует вероятности
участия в игре стратегии А1; значение р2 соответствует вероятности участия
в игре стратегии А2.
Для точного определения координат перпендикуляров из точки N на
единичный отрезок оси абсцисс (x) и на ось ординат – что будет
соответствовать значению цены игры (ν), необходимо записать уравнение
прямых В1, В2.
Для прямой В1 уравнение примет вид:
𝑥−0
𝑦−𝑎11
=𝑎
1−0
(3)
21 −𝑎11
Из (3) определяем
y = (a21 – a11 ) x + a11
Для прямой В2 уравнение примет вид:
𝑥−0
𝑦−𝑎12
=𝑎
1−0
(4)
Из (4) определяем
y = (a22 – a12 ) x + a12
Далее необходимо найти x и y из системы уравнений (5):
𝑦 = (𝑎21 − 𝑎11 )𝑥 + 𝑎11
{
𝑦 = (𝑎22 − 𝑎12 )𝑥 + 𝑎12
Используя метод подстановки, получим:
(𝑎22 − 𝑎12 )𝑥 + 𝑎12 = (𝑎21 − 𝑎11 )𝑥 + 𝑎11 ,
откуда
(5)
22 −𝑎12
𝑥=(
(𝑎11 −𝑎12 )
(6)
𝑎22 −𝑎12 −𝑎21 +𝑎11 )
Подставив значение x из (6) в первое уравнение системы 5 получим:
(𝑎
)(𝑎
−𝑎
−𝑎
)
𝑦 = (𝑎21 −𝑎11 −𝑎11+𝑎12) + 𝑎11
22
12
21
(7)
11
Таким образом, значение x разобьёт единичный отрезок на две части,
позволив определить точные значения p1,p2 , а значение y определит цену
игры ν.
Ответ за игрока А записывается в виде как уже было указано выше с
96
добавлением значения цены игры:
SA = ν (p1,p2)
(8)
Решение антагонистической матричной игры 2×2 за игрока В
Решение геометрическим методом за сторону В выполняется
аналогично, отличие будет заключаться только в том, что оси по вертикали
будут соответствовать стратегиям игрока В с соответствующими значениями
проигрыша согласно платёжной матрицы на игру.
Внимание! Так как антагонистические игры, это игры с нулевой
суммой, то численно выигрыш стороны А, равен проигрышу стороны В и
наоборот. Поэтому при описании процесса решения игры необходимо
рассуждать с позиции: если для стороны А ЛПР рассчитывает величины
выигрыша, как это было для игрока А – на что указывает график выделенной
смешанной стратегии SA (рис.2), то для стороны В рассчитывается величина
проигрыша в данной игре, а также вероятности участия в игре стратегий В1 и
В2 соответственно.
Решение за сторону В показано на одном цельном рисунке 3, (как и
следует делать студентам при выполнении индивидуальных заданий на
занятиях), аналогичному по замыслу рисунку 2, построенному за сторону А.
Рисунок 3 – Демонстрация решения парной матричной антагонистической
игры геометрическим методом за сторону В
На рисунке 3 смешанная оптимальная стратегия за сторону В показана
также выделенной ломанной линией (Sв) с точкой перегиба M, которая
определяет цену игры – величину проигрыша для стороны В. На рисунке 3, в
отличии от рисунка 2 показан выбор цены игры ЛПР, при этом он
руководствуется минимаксной стратегией, то есть ν = min(max21,12) – что
соответствует подходу при определении минимально возможного проигрыша
игрока В.
Перпендикуляр опущенный из точки M разобьёт единичный отрезок на
две части, которые и определят значения вероятностей участие в игре чистых
97
стратегий игрока В – значение q1 соответствует вероятности участия в игре
стратегии B1; значение q2 соответствует вероятности участия в игре
стратегии B2.
Для точного определения координат перпендикуляров из точки M на
единичный отрезок оси абсцисс (x) и на ось ординат – что будет
соответствовать значению цены игры (ν), необходимо записать уравнение
прямых А1, А2.
Для прямой А1 уравнение примет вид:
𝑥−0
𝑦−𝑎11
=𝑎
1−0
(9)
12 −𝑎11
Из (9) определяем
y = (a12 – a11) x + a11
Для прямой А2 уравнение примет вид:
𝑥−0
𝑦−𝑎21
=𝑎
1−0
(10)
Из (10) определяем
y = (a22 – a21) x + a21
Далее необходимо найти x и y из системы уравнений (11):
𝑦 = (𝑎12 − 𝑎11 )𝑥 + 𝑎11
{
𝑦 = (𝑎22 − 𝑎21 )𝑥 + 𝑎21
Используя метод подстановки, получим:
(𝑎22 − 𝑎21 )𝑥 + 𝑎21 = (𝑎12 − 𝑎11 )𝑥 + 𝑎11 ,
откуда
(11)
22 −𝑎21
(𝑎11 −𝑎21 )
𝑥 = (𝑎
(12)
22 −𝑎21 −𝑎12 +𝑎11 )
Подставив значение x из (12) в первое уравнение системы (11) получим
(13):
(𝑎
)(𝑎
−𝑎
−𝑎
)
𝑦 = (𝑎21 −𝑎11 −𝑎11+𝑎 21) + 𝑎11
22
21
12
(13)
11
Таким образом, значение x разобьёт единичный отрезок на две части,
позволив определить точные значения q1, q2 , а значение y определит цену
игры ν.
Ответ за игрока В:
Sв = ν (q1,q2)
(14)
Так как антагонистические игры это игры с нулевой суммой, то
очевидно. Что в выражениях (8) и (14) значения цены игры ν одинаковы по
своей величине. Значения же вероятностей q1,q2 и p1,p2 как правило
отличаются друг от друга, если q1 = p1, а q2 = p2, то имеет место ситуация
когда вероятности выигрыша одного игрока А и вероятности проигрыша
другого игрока В равны между собой. Но это не есть ничья!
Пример решения антагонистической игры геометрическим методом
98
У стороны А имеется два радиосредства A1 и A2, которые работают
поочередно, в различное время суток, в зависимости от включенных средств
радиопомех со стороны В – противника. У противника имеется два типа
средств постановки радиопомех B1 к B2. Какое из них он применит,
неизвестно, известно только, что применяет он их поочерёдно, как и сторона
А применяет свои радиосредства A1 и A2.
В результате многократно проведенных сеансов связи с применением
радиосредств A1 и A2 в условиях применения средств противодействия
противника B1 и В2 рассчитана вероятность установления связи стороной А
(таблица 1).
Необходимо выработать рекомендации стороне А, по применению
имеющихся у неё радиосредств A1 и A2, оценить вероятность установления
связи при их оптимальном применении.
Определить наиболее эффективный вариант применения противником
своих средств радиоподавления B1 и В2.
Таблица 1.
j
i
B1
B2
A1
0.608
0.8
A2
1.0
0.440
Требуется решить игру геометрическим методом.
Самостоятельно составить условия антагонистической игры для
задач 1-20 (по вариантам заданий определенным преподавателем) и
решить её геометрическим методом. Быть готовым условия задачи и её
решение пояснить на практическом занятии по дисциплине.
Задача 1
0,7 0,2
(0,3
)
0,9
Задача 2
0,1 0,6
(0,6
)
0,3
Задача 3
0,3
(0,7
)
0,5 0,8
Задача 4
0,2 0,6
(0,8
)
0,3
Задача 5
Задача 6
Задача 7
Задача 8
0,8З
(01,0 0,5
)
0,2 0,9
(0,7 0,6 0,3 0,6)
0,9 0,9 0,9 0,4
0
0,9 0,8
(1,0
)
0,85 0,5
0,9 0,3
(0,6
)
0,4 0,75 0,7
Задача 9
0,9
(1,0
0,5
0,4
0,2
)
0,5
0,2 0,4 0,2 0,3
Задача 10
Задача 11
0,8 0,8 0,4
0
0,5
(0,5
0
(0,9 0,6 0,9 )
1,0 0,3 0,4
99
Задача 12
0,6
)
0,5
0,8
(00,8 0,9
)
0,9 0,5
Задача 13
0
0,5
(1,0
0,3
Задача 14
Задача 15
0,2 0,9 0,7
0,3 0,8
( 0,6
0,8
Задача 16
0,9
)
0,9
(0,1 0,2 0,4)
Задача 17
Задача 18
Задача 19
0,7 0,9
(0,4
)
1,0 0,2 1,0
(0,1 0,7 0,8 0,8)
0,1 0,2 0,3 0,3
0,8 0,4
(0,6
)
0,1 0,7 0,5
0,4 0,8 0,1
0,6 0,7 0,8 0,5
0,7
)
0,5
0,5 0,8
(1,0
)
1,0 0,9 0,5
Задача 20
0,5 0,2
(0,8
)
1,0 0,3 0,8
3) Решение антагонистических игр произвольной размерности.
Метод сведения игры к задаче линейного программирования
Игра m х n в общем случае не имеет наглядной геометрической
интерпретации. Ее решение достаточно трудоемко при больших m и n,
однако принципиальных трудностей не имеет, поскольку может быть сведена
к решению задачи линейного программирования. Покажем это.
Пусть игра m х n задана платежной матрицей р = (aij), ( i =1, 2,..., m; j = 1,
2, ..., n.) Игрок А обладает стратегиями А1, A2,..., Аm, игрок В — стратегиями
В1, В2, ...,Bn. Необходимо определить оптимальные стратегии
SA* =(р1,р2,…,рm) и SB* = (q1,q2,...,qn),
где pi,qj, — вероятности применения соответствующих чистых стратегий
Ai Вj , для которых выполняются условия (1) и (2).
p1* + p2*+…+ pm* = 1
(1)
q1* + q2*+…+ qn* = 1
(2)
*
Оптимальная стратегия SA = (p1,p2,...,pm) обеспечивает игроку А
средний выигрыш, не меньший, чем цена игры ν, при любой стратегии
игрока В и выигрыш, равный цене игры ν, при оптимальной чистой (при
наличии «седловой» точки) или смешанной стратегии игрока В. При этом
полагаем ν > 0; этого можно добиться, сделав все элементы платёжной
матрицы aij > 0 (для этого прибавив к каждому элементу платежной матрицы
некоторое положительное число М по модулю большее или равное
наименьшему отрицательному элементу исходной матрицы).
Теорема 1. Если игрок А применяет смешанную стратегию SA* =
(р1,р2,...,pm) против любой чистой стратегии игрока В, то он получает
средний выигрыш, или математическое ожидание выигрыша не меньше
чем цена игры.
Применив теорему к каждой чистой стратегии игрока В, получим (3)
a11 p1 + a21 p2 + ⋯ + a𝑚1 p𝑚 ≥ ν
a12 p1 + a22 p2 + ⋯ + a𝑚2 p𝑚 ≥ ν
(3)
{ …
…………………………………….
a1𝑛 p1 + a2𝑛 p2 + ⋯ + a𝑚𝑛 p𝑚 ≥ ν
Каждое из неравенств можно разделить на число ν > 0. Введем новые
100
переменные:
𝑝
𝑝
𝑝
𝑥1 = ν1 , 𝑥2 = ν2 , … , 𝑥𝑚 = ν𝑚
Подставив (4) в (3), получим:
a11 x1 + a21 x2 + ⋯ + a𝑚1 x𝑚 ≥ 1
a x + a22 x2 + ⋯ + a𝑚2 x𝑚 ≥ 1
{ 12 1
……………………………………….
a1𝑛 x1 + a2𝑛 x2 + ⋯ + a𝑚𝑛 x𝑚 ≥ 1
(4)
(5)
Цель игрока А — максимизировать свой гарантированный выигрыш,
т.е. цену игры ν.
Разделив на ν уравнение p1 + р2 …+ pm = 1 и используя замену (4),
получаем:
x1 + x2 +... + xm = 1/ ν
(6)
Максимизация цены игры ν эквивалентна минимизации величины 1/ ν.
Налицо задача линейного программирования (ЗЛП) на основании (5) и
(6), которая может быть сформулирована следующим образом: определить
значения переменных хi, где i= 1, 2, ..., m, так, чтобы они удовлетворяли
линейным ограничениям (5) и при этом линейная целевая функция
Z(x) = x1 + x2 +... + xm обращалась в минимум,
(7)
где Z(x) = 1/ ν .
Далее решается задача линейного программирования, с использованием
выражения функции цели (7) и системы ограничений (5). Решение лучше
выполнять с использованием ППП MS Excel (п.3.1.3 настоящего пособия). В
результате решения ЗЛП получаем оптимальные значения x1 + x2 +... + xm и
оптимальное значение функции цели Z(x)*.
Затем воспользовавшись выражениями (4) определяем вероятности
участия в игре чистых стратегий р1, р2, …рm, тем самым определив
оптимальную смешанную стратегию игрока А – SA*.
Цена игры будет равна обратному значению функции цели, полученной
через поиск решений в MS Excel, так как Z(x)* = 1/ ν.
Для определения оптимальной стратегии SВ* = (q1,q2,...,qn) следует
учесть, что игрок В стремится минимизировать свой проигрыш, т.е.
необходимо найти max выражения 1/ν. Переменные q1,q2,..,qn удовлетворяют
неравенствам.
Теорема 2. Если игрок В применяет смешанную стратегию SВ* =
(q1,q2,...,qn) против любой чистой стратегии игрока A, то он получает
средний проигрыш, или математическое ожидание проигрыша не
больше чем цена игры.
Применив теорему к каждой чистой стратегии игрока А, получим (8)
a11 q1 + a12 q2 + ⋯ + a1𝑛 q𝑛 ≤ ν
a q + a q2 + ⋯ + a2𝑛 q𝑛 ≤ ν
(8)
{ …21… 1… … …22… …
…………………….
a𝑚1 q1 + a𝑚2 q2 + ⋯ + a𝑚𝑛 q𝑛 ≤ ν
Каждое из неравенств можно также разделить на число ν > 0. Введем
101
новые переменные:
𝑝
𝑝
𝑝
𝑦1 = ν1 , 𝑦2 = ν2 , … , 𝑦𝑛 = ν𝑛
(9)
Подставив (9) в (8), получим (10):
a11 y1 + a12 y2 + ⋯ + a1𝑛 y𝑛 ≤ 1
a y + a22 y2 + ⋯ + a2𝑛 y𝑛 ≤ 1
(10)
{ 21 1
……………………………………….
a𝑚1 y1 + a𝑚2 y2 + ⋯ + a𝑚𝑛 y𝑛 ≤ 1
Цель игрока В — минимизировать свой проигрыш, т.е. цену игры ν.
Разделив на ν уравнение q1 + q2 …+ qn = 1 и используя замену (9),
получаем:
y1 + y2 +... + yn = 1/ ν
(11)
Минимизация цены игры ν эквивалентна максимизации величины 1/ ν.
Налицо задача линейного программирования (ЗЛП) на основании (10) и
(11), которая может быть сформулирована следующим образом: определить
значения переменных yj, где j= 1, 2, ..., n, так, чтобы они удовлетворяли
линейным ограничениям (10) и при этом линейная целевая функция
Z(y) = y1 + y2 +... + yn обращалась в максимум,
(12)
где Z(y) = 1/ ν .
Далее решается задача линейного программирования, с использованием
выражения функции цели (12) и системы ограничений (10). Решение
выполнять также с использованием ППП MS Excel (п.3.1.3 настоящего
пособия). В результате решения ЗЛП получаем оптимальные значения
y1 + y2 +... + yn и оптимальное значение функции цели Z(y)*.
Затем воспользовавшись выражениями (9) определяем вероятности
участия в игре чистых стратегий q1, q2, …qn, тем самым определив
оптимальную смешанную стратегию игрока B – SB*.
Цена игры будет также равна обратному значению функции цели,
полученной через поиск решений в MS Excel, так как Z(y)* = 1/ ν.
Внимание! Если исходная платёжная матрица содержала отрицательные
элементы и было к каждому элементу платежной матрицы прибавлено
некоторое положительное число М по модулю большее или равное
наименьшему отрицательному элементу исходной матрицы (для того чтобы
свести игру к ЗЛП и решить её в положительных значениях чисел),
необходимо: вычесть из конечного значения цены игры ν положительное
число М, полученный результат и будет оптимальным значением цены игры
ν.
Пример решения игры m×n методом сведения игры к ЗЛП
Предприятие А реализует три вида продукции (А1, А2 и А3), в условиях
конкуренции со стороны предприятия В, прибыль предприятия А от
реализации своей продукции указана в условных единицах в таблице 1.
Величина прибыли аij i=1,2,3; j=1,2,3,4 при этом зависит от действий
конкурента – предприятия В по 4-м направлениям (В1, В2, В3, В4).
Определить, в каком процентном соотношении следует реализовать
предприятию А свою продукцию чтобы получать максимальную прибыль.
102
Определить, в каком процентном соотношении следует использовать
каждое из 4-х направлений руководителю предприятия В, чтобы
максимально снизить прибыль своего конкурента – предприятия А.
Таблица 1
Действия
конкурента
Вид
продукции
B1
В2
B3
B4
3
5
7
8
9
7
6
4
5
8
2
4
А1
А2
A3
Анализ таблицы руководителем предприятия В показывает, что
применять действия против своего конкурента – предприятия А по
направлению В2 нецелесообразно, так как в этом случае предприятие
получает при реализации каждого из 3-х видов своей продукции
максимальную прибыль. В связи с этим, необходимо упростить платёжную
матрицу – убрать из таблицы 1 столбец В2, получим таблицу 2.
Таблица 2
Действия
конкурента
Вид
продукции
В3
B1
i
B4
А1
А2
A3
3
5
7
6
4
5
8
2
4
j
7
6
8
3
2
4
4
6
В таблице 2 также представлена нижняя цена игры = 4 и верхняя цена
игры = 6. Так как ≠ , то игра не имеет решение в чистых стратегиях,
необходимо определять цену игры и вероятности участия в игре каждой из
чистых стратегий за предприятие А и предприятие В в оптимальных
смешанных стратегиях. Из таблицы 2 известно только, что оптимальная
средняя прибыль для предприятия А будет лежать в интервале 4 ≤ ν ≤ 6.
При этом упростить далее платежную матрицу (таблица 2) также не
представляется возможным, поэтому необходимо решать игру методом
сведения игры к задаче линейного программирования.
На первом этапе непосредственного решения игры, согласно платёжной
матрицы (таблица 2), необходимо привести игру к ЗЛП. Формируем условия
ограничения (13) согласно (3) для предприятия А и согласно (8) для
предприятия Б (14)
103
3p1 + 5p2 +7p3 ≥ ν
{6p1 + 4p2 +5p3 ≥ ν
8p1 + 2p2 +4p3 ≥ ν
(13)
3q1 + 6q3 + 8q4 ≤ ν
{5q1 + 4q3 + 2q4 ≤ ν
7q1 + 5q3 + 4q4 ≤ ν
(14)
Введем переменные x1,x2,x3 согласно (4) и y1,y2,y3,y4 согласно (9),
получим (15) и (16):
3x1 + 5x2 +7x3 ≥ 1
{6x1 + 4x2 +5x3 ≥ 1
(15)
8x1 + 2x2 +4x3 ≥ 1
3y1 + 6y3 + 8y4 ≤ 1
{5y1 + 4y3 + 2y4 ≤ 1
7y1 + 5y3 + 4y4 ≤ 1
(16)
Записываем выражения целевых функций для предприятия А (17) и
предприятия В (18) в соответствии с (7) и (11) соответственно:
x1 + x2 + x3 ≥ 1/ν → min
(17)
y1 + y3 + y4 ≤ 1/ν →max
(18)
На втором этапе решения игры вводим исходные данные согласно (15) и
(17) на лист таблицы MS Excel для предприятия А и на другой лист таблицы
MS Excel для предприятия В, получим (рисунки 1 и 2 соответственно)
Рисунок 1 – Заполненная исходная форма для предприятия А
104
Рисунок 2 – Заполненная исходная форма для предприятия В
Вводим в подготовленные исходные формы в «Мастере функций»
суммы произведений согласно (15), (16), (17), (18), получим (рисунки 3,4)
Рисунок 3 – Результат выполнения действий в «Мастере функций» для
предприятия А.
Рисунок 4 – Результат выполнения действий в «Мастере функций» для
предприятия В.
Переходим в «Поиск решения» для ввода ограничений по предприятию
А, согласно (15) и по предприятия В, согласно (16), получим (рисунки 5,6)
105
Рисунок 5 – Результат ввода ограничений в «Поиск решения» для
предприятия А.
Рисунок 6 – Результат ввода ограничений в «Поиск решения» для
предприятия В.
На третьем этапе решения игры определяем оптимальные значения
переменных x1, x2, x3 за предприятие А и y1,y3,y4 за предприятие В.
Определяем функции цели по предприятию А – Z (x) и по предприятию В –
Z(y), получим (рисунки 7,8).
106
Рисунок 7 – Результат решения ЗЛП за предприятие А.
Рисунок 8 – Результат решения ЗЛП за предприятие В.
На четвёртом этапе решения игры необходимо согласно (4) и (6)
определить вероятности реализации продукции A1, A2, A3 предприятием А
для получения максимальной прибыли в условиях противодействия
конкурента – предприятия В, а также ожидаемую среднюю прибыль для
предприятия А в этих условиях (19).
𝑝
𝑝
𝑝
𝑥1 = 1 , 𝑥2 = 2 , 𝑥3 = 3
(19)
ν
ν
ν
Из таблицы Excel (рисунок 6) снимаем значения xi :
x1 = 0,07; x2 = 0; x3 = 0,11
Из таблицы Excel (рисунок 6) снимаем значение функции цели:
Z(x) =1/ ν ≈ 0,19, отсюда ν = 1/ 0,19 ≈ 5,26.
Подставляем значение ν в каждое из значений x1 , x3 , получим значения
вероятностей:
𝑝1 = 𝑥1 ν = 0,07*5,26 = 0,368; 𝑝3 = 𝑥3 ν = 0,11*5,26 = 0,579;
Проверка решения игры:
𝑝1 + 𝑝3 = 0,368 + 0,579 = 0,07*5,26 = 0,947;
Погрешность расчётов с помощью MS Excel составила: ∆=0,053,
объяснить её можно тем, что значения переменных xi в таблице Excel были
рассчитаны с точностью до второго знака после запятой.
Вывод по предприятию А:
Предприятию А для получения максимальной прибыли в условиях
противодействия со стороны конкурента – предприятия В следует
107
реализовывать только продукцию А1 и А3 в соотношениях: продукцию А1 в
количестве 36,8% от общего объема, а продукцию А3 в количестве 57,9% от
общего объема продукции. При таких объемах реализации предприятие А
получит прибыль в 5,26 условных единиц.
На этом же четвертом этапе решения игры необходимо согласно (9) и
(11) определить вероятности успешного противодействия предприятию А со
стороны предприятия В используя воздействия на конкурента по
направлениям В1, В3, В4, а также ожидаемый величину своей недоработки
позволив конкуренту получить некоторое значение прибыли (20).
𝑝
𝑝
𝑝
𝑦1 = 1 , 𝑦2 = 2 , … , 𝑦𝑛 = 𝑛
(20)
ν
ν
ν
Из таблицы Excel (рисунок 7) снимаем значения yj :
y1 = 0,04; y3 = 0,15; y4 = 0
Из таблицы Excel (рисунок 7) снимаем значение функции цели:
Z(x) =1/ ν ≈ 0,19, отсюда ν = 1/ 0,19 ≈ 5,26.
Подставляем значение ν в каждое из значений y1 , y3 , получим значения
вероятностей:
𝑞1 = 𝑦1 ν = 0,04*5,26 = 0,210; 𝑞3 = 𝑦3 ν = 0,15*5,26 = 0,789;
Проверка решения игры:
𝑝1 + 𝑝3 = 0,368 + 0,579 = 0,07*5,26 = 0,947;
Погрешность расчётов с помощью MS Excel составила: ∆=0,001,
объяснить её также можно тем, что значения переменных yj в таблице Excel
были рассчитаны с точностью до второго знака после запятой.
Вывод по предприятию B:
Предприятию B следует для противодействия своему конкуренту –
предприятию А использовать в основном направление В3, а именно в 78,9%
случаях от общего объема воздействий на конкурента и только в 21,0%
случаев использовать направление воздействия В1, направление В4 не
следует использовать вообще, оно не позволяет помешать успехам
предприятия А при реализации им своей продукции.
Несмотря на предпринятые воздействия против конкурента,
предприятию А всё же удалось получить 5,26 условных единиц прибыли.
Самостоятельно составить условия антагонистической игры для
задач 1-20 (по вариантам заданий определенным преподавателем) и
решить её геометрическим методом. Быть готовым условия задачи и её
решение пояснить на практическом занятии по дисциплине.
Задача 1
5 −3 7
Задача 2
4 2 8 3
(1 8 4)
(1 7 5 8)
Задача 5
Задача 6
4 4 9
Задача 3
4 8 4
( 6 6 9)
8 −3 4
6 7 2 5
Задача 7
108
Задача 4
2 9 7
(1 2 9)
7 −3 1
Задача 8
8 4 −5
(1 9 4)
4 8 3
Задача 9
1
2 9 3
4 9 3 4
Задача 14
4 9 −2
4 5 7
Задача 17
2 0 7
(3 9 4)
4 −6 1
Задача 11
4 8 6
Задача 13
(7 2 1)
4 −6 1
Задача 10
(5 6 −4)
3 8 4
7−3 4
Задача 15
2 9 −7
( 1 −2 4)
4 8 1
4 3 6
Задача 18
6 2
4 1
3
2
7
1 4
(1 2
5 2
3
6
3
1 7 3 6
(7 2 8 8)
6 7 8 5
4 6
(1 9
8 2
Задача 19
0
3)
3
3 4 8 3
Задача 16
5 4 7
(1 2 4)
9 1 5 4
(7 6 3 6)
Задача 12
(5 6 9 )
8 3 4
(1 5
4 7
(1 7 4)
2 4 8 3
(8 7 2 8)
6 2 8 5
6
(7 6 5 6)
3
0
1
7
4)
3
Задача 20
3
3)
8
5 6 2
(1 2 −4)
4 3 1
Игры с «природой»
В отличие от антагонистических игр, в играх с «природой» у одного
игрока (ЛПР) сознательного противника нет, а действуют лишь, так
называемые «слепые силы природы»: погодные условия, состояние
торгового оборудования на предприятии, болезни сотрудников,
нестабильность экономической ситуации, рыночная конъюнктура, динамика
курсов валют, уровень инфляции, налоговая политика, изменяющийся
покупательский спрос и т.п. В таких случаях «природа» не злонамеренна и
выступает пассивно, причем иногда во вред человеку, а иногда к его выгоде,
однако её состояние и проявление могут ощутимо влиять на результат
деятельности человека. То есть, в задачах подобного рода, выбор решения
зависит от состояний объективной экономической действительности,
называемой в модели «природой».
Термин
«природа»
характеризует
некую
объективную
действительность, которую не следует понимать буквально. Математические
модели подобных конфликтных ситуаций также называются «играми с
природой».
В таких играх человек старается действовать осмотрительно, например,
используя стратегию, позволяющую получить наименьший проигрыш.
Второй игрок («природа») действует незлонамеренно, совершенно
случайно, возможные стратегии его известны (стратегии природы). Такие
ситуации исследуются с помощью теории статистических решений.
Хотя вполне могут встречаться ситуации, в которых игроком может
действительно выступать природа. Например, обстоятельства, связанные с
погодными условиями или с природными стихийными силами. Игра
человека с природой тоже отражает конфликтную ситуацию, возникающую
109
при столкновении интересов в выборе решения. Но «стихийным силам
природы» нельзя приписать разумные действия, направленные против
человека и тем более какой-либо «злой умысел».
Таким образом, корректнее говорить о конфликтной ситуации,
вызванной столкновением интересов человека и неопределенностью
действий природы, но без явной антагонистической окраски.
Ситуации, в которых риск связан не с сознательным противодействием
противоположной стороны (среды), а с недостаточной осведомленностью о
ее поведении или состоянии лица, принимающего решение, исследуются с
помощью теории статистических решений.
Создателем теории статистических игр считается А. Вальд (19021950гг)3. Он показал, что в теории принятия решений статистические игры
являются основным подходом, если решение принимается в условиях риска.
Каковы основные отличия статистической игры от матричной
игры?
Статистическая игра существенно отличается от конечной
антагонистической игры двух лиц с нулевой суммой, где выигрыш одного
равен проигрышу другого (то есть матричной игры). В статистической игре
«природа» не является разумным игроком, который стремится выбрать для
себя оптимальные стратегии. Этот игрок не заинтересован в выигрыше.
Другое дело – человек, в данном случае, статистик. Он имеет целью выиграть
игру с воображаемым противником, т. е. с «природой». Игрок-природа не
выбирает оптимальной стратегии, но статистик должен стремиться к
определению распределения вероятностей состояния природы. Основными
отличиями статистической игры от стратегической являются:
− отсутствие стремления к выигрышу у игрока-ПРИРОДЫ, т. е.
отсутствие антагонистического противника;
− возможность
игрока-статистика
провести
статистический
эксперимент для получения дополнительной информации о стратегиях
природы.
Так, например, статистик, работающий в фирме «Одежда», может
изучить многолетние данные о погодных условиях в местностях, где одежда
будет продаваться, и в зависимости от наиболее вероятного состояния
погоды выработать рекомендации, куда и какое количество партий изделий
отправлять, где выгоднее и на каком уровне провести сезонное снижение цен
и т. д.
Таким образом, теория статистических решений является теорией
проведения статистических наблюдений, обработки этих наблюдений и их
использования. Для принятия решений в условиях риска используют методы
теории вероятностей, если это возможно, по причине массовости явления. В
таком случае факторы, например, состояния среды, представляют собой
либо случайные величины, либо случайные функции. Они описываются
венгерский математик и статистик. В сферу его научных интересов входили теория принятия решений,
эконометрика, геометрия, математическая статистика и теория вероятностей.
3
110
какими-либо статистическими характеристиками, например математическим
ожиданием и дисперсией, и обладают статистической устойчивостью.
В игре «с природой» участвуют два игрока.
Игрок 1 – это лицо, принимающее решение (ЛПР), обозначим его «А».
Игрок 2 – это «природа», обозначим его «Q».
В играх «с природой» сознательно действует только один из
участников – лицо, принимающее решение (ЛПР). «природа» является
вторым игроком, но не противником игрока А. Так как «природа» осознанно
против первого игрока не действует, принимает то или иное свое состояние
определенным образом, конкретных целей в игре не преследует и
безразлична к результату игры. То есть «природа», являясь игроком в игре
«с природой», не является ни противником, ни союзником игрока А.
Как строится матрица выигрышей в игре с природой?
Формально изучение игр «с природой», так же как и стратегических,
должно начинаться с построения матрицы выигрышей (платежной
матрицы), что является, по существу, наиболее трудоемким этапом
подготовки принятия решения. Ошибки, допущенные при формировании
матрицы выигрышей (платежной матрицы), не могут быть компенсированы
никакими вычислительными методами и приведут к неверному итоговому
результату.
Матрица игры «с природой» аналогична платежной матрице
стратегической игры «m x n» (таблица 1).
Таблица 1
Состояние «природы»
Стратегии ЛПР
А1
А2
…..
Аm
Q1
Q2
……
Qn
а11
а21
……
аm1
а12
а22
……
аm2
……
……
……
……
а1n
а2n
……
аmn
Формализация задачи происходит следующим образом:
− у активного игрока (человека) возможные действия по-прежнему
называются стратегиями;
− а возможные действия пассивного игрока («природы») –
состояниями или условиями «природы».
Пусть игрок 1 – «A» (лицо, принимающее решение), имеет m
стратегий Ai, i = 1, …, m. Игрок 2 – «природа», может находиться в одном
из n возможных состояний Qj, j = 1, …, n. Состояния природы Qj можно
рассматривать как ее возможные «стратегии».
Обычно предполагается, что игрок A (ЛПР) в состоянии оценить
результаты выбора им каждой из своих стратегий Ai, i=1,…,m, при каждом
состоянии природы Qj, j=1,…,n. Эти результаты количественно выражаются
действительными числами aij, и называются выигрышами игрока A (ЛПР) в
игре «с природой».
111
Так как в играх «с природой» в качестве первого игрока всегда
выступает человек (ЛПР), то можно составить матрицу выигрышей
(платежную матрицу) игры «с природой» – матрицу размера «m x n» с
элементами {aij}. Номер строки матрицы соответствует номеру стратегии,
применяемой первым игроком – человеком (ЛПР). Номер столбца
соответствует номеру состояния «природы» – второго игрока. Элемент
матрицы aij – это выигрыш игрока 1 (ЛПР), если он выбрал стратегию Ai при
состоянии природы Qj.
В чем заключается содержательное отличие матрицы выигрышей
в игре с природой от платежной матрицы конечной антагонистической
игры?
Содержательное отличие матрицы выигрышей в игре «с природой» от
платежной матрицы конечной антагонистической игры заключается в том,
что элементы столбцов этой матрицы не являются проигрышами «природы»
при соответствующих её состояниях. Выигрыши aij платит не «природа», а
некая третья сторона или совокупность сторон, влияющих на принятие
решения игроком 1, и объединенных в понятие «природа».
Если в распоряжении игрока A всего одна стратегия A1, то есть m =1, то
проблема выбора им оптимальной стратегии отпадает. Поэтому в
дальнейшем целесообразно считать m ≥ 2. Если «природа» Q может
пребывать только в одном состоянии Q1, то есть n =1, то проблема выбора
игроком A оптимальной
стратегии
превращается
в
тривиальную:
игрок A должен выбрать стратегию Ak такую, что выигрыши аk1 ≥ ai1,
i=1,…, m. Поэтому будем предполагать, что n ≥ 2.
Могут ли доминировать стратегии в игре с природой?
В игре с природой стратегии могут доминировать относительно друг
друга. Если k-я строка матрицы A доминируется (или дублируется) какойлибо другой s-й строкой этой матрицы (k≠s), то есть, если выполнены
неравенства: akj ≤ asj,
для
всех j=1,
..., n, (или
выполнены
равенства: akj = asj, j = 1,…, n). То доминируемую (дублируемую) k-ю строку
матрицы A можно удалить, как строку, определяющую стратегию Ak,
заведомо не лучшую стратегии As. В результате матрица A упрощается за
счет уменьшения числа строк.
Пример 1. (доминирование стратегий в игре с природой).
Рассмотрим пример матрицы выигрышей в игре «с природой» (таблица
2).
Таблица 2
Состояния «природы»
Q1
Q2
Q3
Q4
Q5
A1
A2
3
8
2
5
1
6
1
1
1
3
A3
A4
A5
2
3
4
3
9
7
2
3
4
0
0
8
1
2
1
Стратегии ЛПР
112
В данном примере стратегия A5 доминирует стратегии A1 и А3, поэтому
строки, соответствующие стратегиям A1 и A3, можно вычеркнуть. Число
строк в полученной матрице – на 2 меньше, чем в исходной матрице. Размер
матрицы игры будет равен «3x5» (таблица 3).
Таблица 3
Состояния «природы»
Q1
Q2
Q3
Q4
Q5
A2
8
5
6
1
3
A4
3
9
3
0
2
A5
4
7
4
8
1
Стратегии ЛПР
Таким образом, в играх «с природой» можно и нужно пользоваться
принципом доминирования стратегий игрока A (игрока – ЛПР). Но
доминирование стратегий в игре с природой имеет определенную специфику.
В чем заключаются особенности доминирования стратегий в игре с
природой?
1) Исключать из рассмотрения можно лишь стратегии игрока A (ЛПР),
которые
доминируются другими стратегиями игрока А. А столбцы,
отвечающие состояниям «природы» (как это делается в антагонистических
играх), вычеркивать из матрицы, даже если они доминируются другими
столбцами игры недопустимо.
2) Поскольку «природа» не стремится к выигрышу в «игре» с человеком,
для нее нет целенаправленно выигрышных или проигрышных состояний
(стратегий), «природа» действует неосознанно.
Например, в полученной матрице (рисунок 3) пятый столбец (Q5)
доминируется первым, вторым и третьим столбцами (Q1, Q2, Q3). Поэтому в
матричной игре эти столбцы можно было бы удалить, (как максимальный
проигрыш для второго игрока). Но в игре «с природой» этого делать нельзя.
Это обстоятельство является еще одним свойством, отличающим игры «с
природой» от матричных игр.
Таким образом, в дальнейшем будем считать, что матрица выигрышей
(рисунок 1) не содержит доминируемых (дублируемых) строк.
От чего зависят методы принятия решений в играх с природой?
Методы принятия решений в играх «с природой» зависят от того,
известны или нет вероятности состояний (стратегий) «природы» Q.
Пусть события, состоящие в том, что «природа» Q находится в одном из
своих состояний Q1, …, Qn, несовместны и составляют полную группу
событий. При этом вероятности pj состояний «природы» Qj известны, то
есть известны значения:
p1 = p(Q1), p2 = p(Q2), …, pn = p(Qn),
где выполнены условия:
pj > 0, j=1, …, n; ∑pj = 1.
113
В этом случае имеет место ситуация риска, и решения принимаются в
условиях риска.
Принятие решений в условиях риска характеризуется тем, что поведение
природы (среды) Q имеет случайный характер. Это проявляется в том, что
существует некоторая вероятностная мера, в соответствии с которой
возникают (наступают) те или иные состояния Qj природы Q.
При этом лицо, принимающее решение, имеет определенную
информацию о вероятностях появления состояний Qj «природы», которая по
своему характеру может быть весьма разнообразна.
Например, если имеются три состояния «природы» Q1, Q2 и Q3, то
дополнительная информация о появлении этих состояний может заключаться
в том, что состояние Q1 наименее вероятно, а состояние Q3 наиболее
вероятно.
Статистические модели принятия решений представляют собой игру
двух лиц (человека и природы) с использованием человеком дополнительной
статистической информации о состояниях природы.
Если вероятности, с которыми «природа» Q может находиться в
том или ином своем состоянии, неизвестны и отсутствует возможность
получения о них какой-либо статистической информации, то имеет место
ситуация полной неопределенности, и решения принимаются в условиях
полной неопределенности.
Цель в играх «с природой»: независимо от вида матрицы игры
требуется выбрать такую стратегию игрока A (ЛПР), которая была бы
наиболее выгодной по сравнению с другими.
Ниже рассматриваются примеры решения игр с «природой» в условиях
определенности данных о «природе» (то есть, решения ЛПР принимаются в
условиях риска), а также в условиях полной неопределенности данных о
«природе».
В каждом из рассматриваемых примеров ЛПР используется тот или
иной критерий поиска (выбора) оптимального или более предпочтительного
решения, которые были рассмотрены в настоящем учебном пособии выше, а
именно: критерий Лапласа, максиминный (минимаксный) критерий Вальда,
максимаксный критерий, критерий Гурвица, критерий Сэвиджа.
Пример решения игры ЛПР с «природой» с использованием
различных критериев выбора
Подходит время выпуска нового смартфона от фирмы Samsung, прошла
презентация, эксперты высказали свое мнение, и ЛПР (игрок) от фирмы
Samsung должен принять решение – когда начать серийный выпуск продукта
Galaxy S5?
Второй игрок – компания Apple, (играющая за «природу»), планирует
выпуск iPhone 6.
ЛПР от компании Samsung предположил что может быть три варианта
выпуска смартфонов Galaxy S5:
− до конкурента от фирмы Apple (А1);
114
− вместе с конкурентом (А2);
− после конкурента (А3).
Естественно, пока не выйдет новый iPhone 6 компания Samsung не
узнает:
− будет он намного лучше Galaxy S5 (Q1);
− таким же (Q2);
− или сильно будет уступать в качестве Galaxy S5 (Q3).
ЛПР посчитав прибыль для компании Samsung, во всех указанных
случаях, получил платёжную матрицу:
Q1
Q2
Q3
А1
5
5
7
А2
3
4
6
А3
2
4
8
Рассмотрим решение игры с «природой», по данной платёжной матрице
по рассмотренным раннее критериям.
1. Критерий Вальда (максиминный)
ЛПР рассчитывает, что «природа» пойдет по наихудшему для него пути,
и следует выбрать вариант с максимальной прибылью при самом плохом
исходе, поэтому данный критерий считается пессимистическим.
Представить его можно в виде max (min i). При данном критерии:
для А1 минимальной прибылью (5) выльются действия природы
Q1 и Q2;
для А2 минимальная прибыль (3) после действия Q1;
для А3 минимальная прибыль (2) после действия Q1;
Таким образом из 5, 3 и 2 максимум прибыли (5) нам даст вариант А1.
2. Критерий максимума (максимаксный) является оптимистическим,
т.е., ЛПР надеется на самый благоприятный для него исход, представляя как
max (max i).
для А1 максимальная прибыль 7
для А2 максимальная прибыль 6
для А3 максимальная прибыль 8
Из 7, 6 и 8 максимальную прибыль принесет вариант А3 (8).
3. Критерий Гурвица рекомендует стратегию, определяемую по
формуле max (Amax i + (1-A)min i), где А — степень оптимизма и изменяется
в пределах от 0 до 1. Критерий выдает результат, учитывающий возможность
как наихудшего, так и наилучшего поведения природы. При А=1 данный
критерий можно заменить критерием максимума, а при А=0 — критерием
Вальда. Величина А зависит от степени ответственности игрока один: чем
она выше, тем ближе А к единице. Если для данного примера принять А =
0,4, получим:
для А1 прибыль равна 0,4*7 + 0,6*5 = 5,8
для А2 прибыль равна 0,4*6 + 0,6*3 = 4,2
для А3 прибыль равна 0,4*8 + 0,6*2 = 4,4
115
Из полученных ответов максимальную прибыль приносит действие А1
4. Критерий Сэвиджа (минимаксный). Суть его заключается в выборе
стратегии, не допускающей слишком высоких потерь. Для этого
используется матрица рисков, в которой вычисляется максимальная прибыль
при каждом варианте действия игрока, и среди результатов выбирается
наименьший. Его формула выглядит как min (max i).
При данном критерии:
для А1 максимальной прибылью (7) выльется действие природы Q3
для А2 максимальная прибыль (6) после действия Q3
для А3 максимальная прибыль (8) после действия Q3
Таким образом, из 7, 6 и 8 минимум прибыли (6) нам даст вариант А2
5. По критерию Байеса предлагается придать равные вероятности всем
рассматриваемым стратегиям (qi), после чего принять ту из них, при которой
ожидаемый выигрыш окажется наибольшим. Критерий имеет один
недостаток: не всегда можно точно определить вероятность того или иного
события со стороны природы. Формулой для него является max (Σqi =1).
Тогда вероятность наступления каждого из событий «природы» равной
0,33, и получили:
для А1 5*0,33 + 5*0,33 + 7*0,33 = 5,61
для А2 3*0,33 + 4*0,33 + 6*0,33 = 4,29
для А3 2*0,33 + 4*0,33 + 8*0,33 = 7,63
Очевидно что максимальную прибыль ЛПР получит от варианта А3.
Однако, например, если обратившись к экспертам, мы получили
вероятности событий для природы 0,5; 0,4; 0,1; соответственно, то в этом
случае:
для А1 5*0,5 + 5*0,4 + 7*0,1 = 5,2
для А2 3*0,5 + 4*0,4 + 6*0,1 = 3,7
для А3 2*0,5 + 4*0,4 + 8*0,1 = 3,4
В этом же случае максимальную прибыль ЛПР получит от варианта А1.
Вывод:
Таким образом, основная задача ЛПР состоит в том, чтобы найти
оптимальные (или хотя бы рациональные) стратегии, наилучшим образом
приводящие систему (бизнес-процесс) к цели, при заданных внешних
условиях.
Для выбора стратегий:
− в условиях неопределенности можно применять любые критерии;
− в условиях риска действеннее критерий Байеса.
Однако, выбор между самими критериями основывается обычно на
интуиции ЛПР и зависит от характера принимающего решение (в частности,
от его склонности к риску).
116
Если решение принимается в условиях неопределенности, то лучше
использовать несколько критериев.
В том случае, если рекомендации совпадают, можно с уверенностью
выбирать наилучшее решение.
Если рекомендации противоречивы, решение надо принимать более
взвешенно, с учетом сильных и слабых сторон.
Решить самостоятельно (по варианту указанному преподавателем)
типовые игры с «природой» №№ 1-10 с использованием ЛПР для поиска
вариантов решений по критериям: Лапласа, максиминному
(минимаксному) критериям Вальда, максимаксному критерию,
критерию Гурвица, критерию Сэвиджа. Быть готовым своё решение
пояснить на практическом занятии по дисциплине.
Задача 1.
Предприятие может выпускать 3 вида продукции А1, А2 и А3, получая при
этом прибыль, зависящую от спроса, который может быть в одном из 4-х
состояний (В1, В2, В3, В4). Элементы платежной матрицы характеризуют
прибыль, которую получат при выпуске i-й продукции при j-м состоянии
спроса. Игра предприятия А против спроса В задана платежной матрицей
(таблица 1):
Таблица 1
В1
В2
В3
В4
А1
2
7
8
4
А2
5
8
7
2
А3
4
3
4
9
Определить оптимальные пропорции в выпускаемой продукции,
гарантирующие максимизацию средней величины прибыли при любом
состоянии спроса, считая его определенным. Задачу решить как игру с
«природой» с использованием: критерия Лапласа, критерия максимакса;
критерия Вальда; критерия Севиджа, критерия Гурвица.
Задача 2.
По условиям задачи 1(изменено количество видов выпуска продукции и
число состояний спроса), задана платёжная матрица (таблица 2)
Таблица 2
А1
В1
В2
В3
3
5
3
117
А2
5
7
5
А3
4
3
4
А4
4
2
4
Определить оптимальные пропорции в выпускаемой продукции,
гарантирующие максимизацию средней величины прибыли при любом
состоянии спроса, считая его определенным. Задачу решить как игру с
«природой» с использованием: критерия Лапласа, критерия максимакса;
критерия Вальда; критерия Севиджа, критерия Гурвица.
Задача 3.
По условиям задачи 1(изменено количество видов выпуска продукции),
задана платёжная матрица (таблица 3)
Таблица 3
В1
В2
В3
В4
А1
3
5
3
8
А2
5
7
5
2
А3
4
3
4
9
А4
4
2
4
1
Определить оптимальные пропорции в выпускаемой продукции,
гарантирующие максимизацию средней величины прибыли при любом
состоянии спроса, считая его определенным. Задачу решить как игру с
«природой» с использованием: критерия Лапласа, критерия максимакса;
критерия Вальда; критерия Севиджа, критерия Гурвица.
Задача 4.
Необходимо закупить уголь для обогрева дома. Количество хранимого
угля ограничено и в течение холодного периода должно быть полностью
израсходовано. Покупать уголь можно в любое время, однако летом он
дешевле, чем зимой. Неопределенность состоит в том, что не известно, какой
будет зима: суровой, тогда придется докупать уголь, или мягкой, тогда часть
угля может остаться неиспользованной.
Имеются следующие прогнозы на предстоящую зиму:
– вероятность: что зима будет мягкой – 0,5; холодной – 0,2; обычной (как
и в предыдущий год) – 0,3.
– зимняя цена и количество угля, необходимого зимой для отопления
дома указаны в таблице 1. Летом цена угля 4 у.е. за 1 т.
Таблица 1
Зима
Мягкая
Обычная
Холодная
Количество угля, т
5
6
8
118
Средняя цена за 1 т, грн.
5
7
9
Требуется определить: Сколько угля рационально купить летом на зиму?
Если потребуется зимой докупить недостающее количество угля, надо будет
платить по зимним ценам. Предполагается, что весь уголь, который будет не
использован зимой, в лето пропадет. Расчёт выполнить по критериям:
Лапласа, максимакса; Вальда; Гурвица, Севиджа.
Задача 5.
По условиям задачи 4 имеются следующие прогнозы на предстоящую
зиму:
– вероятность: что зима будет мягкой – 0,2; холодной – 0,5; обычной (как
и в предыдущий год) – 0,3.
– зимняя цена и количество угля, необходимого зимой для отопления
дома указаны в таблице 2. Летом цена угля 7 у.е. за 1 т.
Таблица 2
Зима
Мягкая
Обычная
Холодная
Количество угля, т
5
7
9
Средняя цена за 1 т, грн.
7
8
10
Требуется определить: Сколько угля рационально купить летом на зиму?
Если потребуется зимой докупить недостающее количество угля, надо будет
платить по зимним ценам. Предполагается, что весь уголь, который будет не
использован зимой, в лето пропадет. Расчёт выполнить по критериям:
Лапласа, максимакса; Вальда; Гурвица, Севиджа.
Задача 6.
По условиям задачи 4 имеются следующие прогнозы на предстоящую
зиму:
– вероятность: что зима будет мягкой – 0,4; холодной – 0,4; обычной (как
и в предыдущий год) – 0,2.
– зимняя цена и количество угля, необходимого зимой для отопления
дома указаны в таблице 3. Летом цена угля 8 у.е. за 1 т.
Таблица 3
Зима
Мягкая
Обычная
Холодная
Количество угля, т
5
7
9
Средняя цена за 1 т, грн.
9
10
12
Требуется определить: Сколько угля рационально купить летом на зиму?
Если потребуется зимой докупить недостающее количество угля, надо будет
платить по зимним ценам. Предполагается, что весь уголь, который будет не
использован зимой, в лето пропадет. Расчёт выполнить по критериям:
Лапласа, максимакса; Вальда; Гурвица, Севиджа.
119
Задача 7.
Компанией возможно строительство четырех типов объектов: А1, А2 ,
А3, А4. Состояния «природы» (условия в которых выполняется
строительство объектов) выражаются через Р1, Р2, Р3, Р4. Экономическая
эффективность строительства объектов в условных единицах задана
матрицей А и изменяется в зависимости от состояния «природы».
𝟔 𝟐 𝟕 𝟒
А= 𝟑 𝟒 𝟔 𝟖
𝟗 𝟑 𝟓 𝟔
( 𝟏 𝟓 𝟑 𝟐)
Требуется определить какие объекты компании целесообразно строить в
зависимости от состояния «природы». Расчёт выполнить по критериям:
Лапласа, максимакса; Вальда; Гурвица, Севиджа.
Задача 8.
По условиям задачи 7 (изменено количество возможного строительства
объектов и количество состояний «природы») Экономическая эффективность
строительства объектов в условных единицах задана матрицей В и
изменяется в зависимости от состояния «природы».
𝟒 𝟓 𝟕 𝟑
В = (𝟓 𝟒 𝟏 𝟕)
𝟖 𝟑 𝟐 𝟔
Требуется определить какие объекты компании целесообразно строить в
зависимости от состояния «природы». Расчёт выполнить по критериям:
Лапласа, максимакса; Вальда; Гурвица, Севиджа.
Задача 9.
По условиям задачи 7 (изменено количество состояний «природы»)
Экономическая эффективность строительства объектов в условных единицах
задана матрицей D и изменяется в зависимости от состояния «природы».
𝟒 𝟑 𝟖
𝑫= 𝟑 𝟒 𝟔
𝟐 𝟗 𝟓
(𝟓 𝟕 𝟐)
Требуется определить какие объекты компании целесообразно строить в
зависимости от состояния «природы». Расчёт выполнить по критериям:
Лапласа, максимакса; Вальда; Гурвица, Севиджа.
Задача 10.
По условиям задачи 7 (изменено количество возможного строительства
объектов и количество состояний «природы») Экономическая эффективность
120
строительства объектов в условных единицах задана матрицей V и
изменяется в зависимости от состояния «природы».
𝟓 𝟐 𝟒𝟓 𝟕
𝑽 = (𝟐 𝟒 𝟗 𝟏 𝟖 )
𝟒 𝟑 𝟓 𝟗 𝟔
Требуется определить какие объекты компании целесообразно строить в
зависимости от состояния «природы». Расчёт выполнить по критериям:
Лапласа, максимакса; Вальда; Гурвица, Севиджа.
2.5. Применение критерия достаточности в задачах однокритериальной
оптимизации. Методы поиска экстремумов унимодальных функций
2.5.1. Нахождение экстремума унимодальных функций методами
исключения интервалов неопределенности
Локальный экстремум – точка в пространстве (на плоскости) исследования, в которой целевая функция имеет наибольшее (наименьшее)
значение по сравнению с её значениями во всех других точках ближайшей
окрестности. На рис.1 показана одномерная функция, имеющая четыре
локальных экстремума (c,d,m,n) на плоскости. Часть пространства
исследования может содержать много локальных экстремумов и следует
сохранять осторожность, чтобы не принять первый из них за решение задачи.
Рисунок 1. – Локальные экстремумы на интервале исследования
Глобальный экстремум – точка в пространстве (на плоскости)
исследования, в которой целевая функция имеет наибольшее (наименьшее)
значение по сравнению с любой другой точкой пространства (плоскости)
исследования.
Таким образом, глобальный оптимум - это оптимальное решение для
всего пространства (плоскости) исследования. Оно лучше всех других
решений, соответствующих локальным оптимумам, и именно его ищет
исследователь.
Унимодальная функция (УФ) – функция f(x), имеющая на всём
интервале исследования один локальный, он же один глобальный экстремум
(максимум или минимум).
121
На рис. 1. cоответственно 2 – локальных максимума и 2 – локальных
минимума, глобальный максимум в точке m , глобальный минимум в точке n.
Задачу одномерной оптимизации можно поставить следующим образом. Пусть значения переменной x заключены в интервале [a;b]. Интервал
значений переменной x, в котором производится поиск оптимума целевой
функции, будем называть интервалом неопределенности. В начале
процесса оптимизации этот интервал имеет длину b-a.
Необходимо определить значения оптимума функции с погрешностью
, то есть найти в интервале [a;b] точку x, такую что
f(x-) < f(x) > f(x+) - при поиске максимума, или
f(x-) > f(x) < f(x+) - при поиске минимума.
Таким образом, нам необходимо иметь план действий, неизбежно
приводящий к определению x* с точностью , где бы эта точка не лежала в
области поиска. Рассматриваемые в дальнейшем методы и являются такими
планами действий по поиску оптимумов функций.
Наиболее естественным и простым способом сужения интервала
неопределенности для одномерной унимодальной функции является его
деление на несколько равных частей с последующим вычислением значений
целевой функции в узлах полученной сетки (рисунок 2).
Рисунок 2 – Поиск максимума УФ методом общего поиска
Данный подход при определении интервала неопределенности с
требуемой точностью () получил название – метод общего поиска. В
результате интервал неопределенности сужается до двух шагов сетки
(интервал x5 – x7). Обычно говорят о дроблении интервала неопределенности,
которое характеризуется коэффициентом дробления fд. Коэффициент
дробления показывает, какую часть от исходного интервала неопределенности составляет новый интервал неопределенности.
Проводя N измерений получим (N+1) частей интервала неопределенности и тогда получим (1):
𝑓д =
2
𝑁+1
,
(1)
122
где 2 – осталось частей интервала неопределенности;
N + 1 – начальное число частей интервала неопределенности.
Чтобы получить значение fд = 0,01 потребуется вычислить целевую
функцию в 199 точках, а при fд = 0,001 – N = 1999. Видно, что эффективность
этого метода при сокращении интервала неопределенности быстро падает.
Сам собой напрашивается другой путь: чтобы получить fд=0,01, вычислим
сначала функцию в 19 точках и получим fд=0,1, а затем, вычислив еще 19
значений на сокращенном интервале получим fд=0,01, сделав при этом всего
38, а не 199 вычислений. Таким образом, при некоторой изобретательности
эффективность поиска экстремума функции можно резко повысить, перейдя
от одношагового алгоритма к многошаговым алгоритмам, которые будут
рассмотрены ниже.
Достоинствами метода общего поиска (МОП) являются:
– получение на всём интервале исследования за один шаг интервал
неопределенности поведения функции с заданной точностью;
– исследовать на начальном этапе любую непрерывную зависимость
f(x) в том числе неунимодальную, для последующего перехода к другим
медом исследования на интервалах где функция унимодальна.
Пример решения задачи методом общего поиска
Для наглядности метода продемонстрируем его на простом примере.
Задача: Найти минимум целевой функции L(x) = (50-х)2 на интервале
х = (20;70) с точностью ε =5.
Решение
1. Решим задачу за один шаг.
Определим
коэффициент
дробления
начального
интервала
неопределенности поведения функции f д : fд= ε/d= 5/50 = 0,1.
Определим количество точек, в которых необходимо вычислить
целевую функцию (ЦФ). Воспользуемся выражением коэффициента
дробления для метода общего поиска:
f д = 2/(N+1),
(2)
Отсюда
N = (2/ f д )-1.
Тогда для fд= 0,1 количество точек N=19. Следовательно, весь интервал
х = [20;70] следует разбить на 20 одинаковых подинтервалов длинною l':
d = 70 – 20 = 50;
l' = 50/20 = 2,5.
Точки вычисления исследуемой функции (x) определим как:
х1 =a+l'; х2 =a+2l'; . . . ; х19 =a+19l'.
Значения N точек и значения ЦФ занесём в таблицу 1.
x1
x2
x3
x4
x5
123
x6
x7
x8
Таблица 1
x9
x10
x11
xi 22,5
L(xi) 756,25
x12
xi
50
L(xi)
0
25
27,5
30
32,5
35
37,5
40
42,5 45 47,5
625 508,25 400
306,25 225
158,25 100 56,25 25 6,25
x13
x14
x15
x16
x17
x18
x19
52,5
55
57,5
60
62,5
65
67,5
6,25
25
56,25 100 158,25 225 306,25
Проиллюстрируем метод общего поиска на графике
Рисунок 3 – Поиск минимума УФ методом общего поиска
Минимальное значение ЦФ L( x * ) = 0 заключено в интервале
неопределенности X* = [ х11 ÷ х13 ] = [47,5÷ 52,5].
Ответ: L( x * ) = 0 при x * = 50 с точностью ε =5.
Поиск экстремумов унимодальных функций методом деления
интервала пополам
Пользуясь тем же приемом, как в МОП, но вычисляя значение функции
в подинтервалах одинаковое число раз, можно дополнительно повысить
эффективность поиска. Вычисляя N значений функций на i последовательно
сужаемых интервалах, получим для коэффициента дробления интервала
неопределенности зависимость (3):
𝑓д = (
2
𝑖
)
𝑁+1
(3)
При таком методе поиска целевую функцию приходится вычислять J
раз, причем J = N*i. Можно найти оптимальное значение N, при котором J
при заданном fд минимально. Зная, что i = J/N можно получить (4):
J=
𝑁∗𝑙𝑛𝑓д
𝑙𝑛(
2
)
𝑁+1
(4)
Такая функция имеет минимум при N=3. При этом на каждом интервале fд=0,5, т.е. каждые три измерения позволяют сузить интервалы
неопределенности вдвое. Поскольку интервал неопределенности делится
124
каждый раз надвое, то метод получил название метода деления интервала
пополам (МДИП).
На рис.4 показано, что три первых вычисленных значения функции
позволяют сузить интервал неопределенности вдвое.
Рисунок 4. – Метод деление интервала неопределенности пополам
Заметим далее, что значение целевой функции в середине нового
интервала уже известно. Поэтому для завершения поиска на следующем
этапе потребуется вычислить только два (вместо трех) значений целевой
функции.
В общем случае при N 3 коэффициент дробления интервала неопределенности составит
N −1
1
fд = ( ) 2
2
(5)
Достоинства МДИП:
– при выполнении каждого шага МДИП интервал неопределенности
поведения функции сокращается в 2 раза;
– удобно вычислять связанные формулами характеристики метода: N,
fд, i, J для их последующего использования и сопоставления с аналогичными
характеристиками в других методах.
Пример решения задачи методом деления интервала пополам
Суть МДИП демонстрируется на том же простейшем примере.
Задача: Найти минимум целевой функции L(x) = (50-х)2 на интервале
х = (20;70) с точностью ε =5.
Решение
1. Определим точку х1 = (a + b) / 2; х1 = (20 + 70) / 2 = 45; L( х1 ) = 25.
2. Определим точки х2 и х3 : х 2 = a + d / 4; х3 = b – d / 4; d = b – a;
d = 50; х2 = 20 + 12,5=32,5; х3 = 70 –12,5 = 57,5; L( х2 ) = 306,25; L( х3 ) = 56,25.
3. Сравниваем L( x1 ); L( x 2 ); L( x3 ):L( x1 )меньше L( x 2 ) и L( x3 ),
следовательно исключаем интервалы (a; х2 ) и ( х3 ;b), полагая a’ = х2 ; b’ = х3 ;
d’ = b’ – a’ = 25.
4. Сравниваем d’ = 25 с заданным конечным интервалом
неопределенности (ε); d’ > ε, следовательно продолжаем вычисления на
125
новом интервале (a’; b’ ) = (32.5; 57.5), действуя согласно п.2 и п.3а.
параграфа 3.2 до получения интервала неопределенности поведения функции
≤ ε.
Для удобства результаты решения будем отображать в таблице 1
Таблица 1
номер
x1
шага
1
45
2
45
3
51,25
4
51,25
Итого 49,572
x2
x3
L(x1)
L(x2)
L(x3)
(а;b)
d
32,5
38,75
48,125
49,572
48,125
57,5
51,25
54,5
52,687
51,25
25
25
1,56
1,56
0,183
306,25
126,56
3,33
0,183
3,33
56,25
1,56
20,25
7,22
1,56
20;70
32,5;57,5
45;57,5
48,125;54,5
48,125;51,25
50
25
12,5
6,275
3,125
Вычисления закончены после 4 шага, т.к. ε > d’; 5 > 3.125.
Ответ: L( x * )=0,183, x * = 49,572.
Проиллюстрируем процесс вычисления графически:
3 шаг:
4 шаг:
Рисунок 5. – Метод деления интервала неопределенности пополам.
Поиск экстремумов унимодальных функций методом дихотомии
Основная идея метода состоит в последовательном уменьшении
интервала неопределенности в направлении поиска экстремума
унимодальной функции. При этом направление поиска определяется путем
анализа значений функции в точках, отстоящих от точки выбранной по
126
методу на достаточно малом расстоянии Е. Чем меньше Е, тем больше
точность определения экстремума, как правило, полагают Е = d'/10,
где d' = – конечный интервал неопределенности функции.
Значение коэффициента дробления после первого шага алгоритма
определится из выражения (6):
1 E
(6)
fд = + .
2 2
Порядок решения задачи методом дихотомии следующий:
1. Положить х1= (а+b)/2,
т.е. выбрать точку анализа в середине
интервала (a;b).
2. Вычислить значения функции в точках L(х2) = L(x1 - (Е/2)),
L(х3) = L(x2 + (Е/2)) (Рисунок 4).
3. Сравнить значения целевой функции L(х2) и L(х3):
а). При поиске минимума функции: Если L(х2) > L(x3) исключить
интервал (а; x1 – (Е/2)), положив а’ = (x1 - (Е/2)). Если L(х2) < L(x3) исключить
интервал (x1 + (Е/2);b), положив b’ = (x1 + (Е/2), перейти к п.4.
б). При поиске максимума функции: Если L(х2) > L(x3) исключить
интервал (x1 + (Е/2);b), положив b’ = (x1 + (Е/2). Если L(х2) < L(x3) исключить
интервал (а; x1 - (Е/2)),, положив а’=(x1 - (Е/2)), перейти к п.4.
4. Вычислить значение d’ = b’ – a’. Если ε ≥d’, то задача решена. Если
нет, то перейти к п.1. Если нет, то выполнить действия согласно п.п.1-3 для
нового интервала неопределенности поведения исследуемой функции, и т.д.
до выполнения условия |d’| ε (рисунок 6,7).
Достоинство метода дихотомии – общее число вычислений (N), будет
на одно меньше, чем при использовании метода деления интервала пополам,
что может иметь смысл при ограниченных возможностях в проведении
исследований.
Рисунок 6. – Метод дихотомии: выполнен первый шаг
127
Рисунок 7. – Метод дихотомии: выполнен заключительный шаг
(например, на рисунке показан 4-ый шаг)
Очевидно в пределе, при → 0, fд → 1/2. В дальнейшем, при
использовании метода дихотомии выполняются те же операции, что и при
методе деления интервала пополам.
Достоинства метода дихотомии:
– на каждом шаге метода выполняется всего два измерения
(вычисления) функции;
–
при исследовании чувствительного (управляемого) процесса
интервал Е или сразу → 0, т.е. можно взять минимальный, тогда после
каждого шага интервал неопределённости будет сокращаться практически в
2 раза, как в МДИП.
Пример решения задачи методом дихотомии
Суть метода дихотомии демонстрируется на том же простейшем
примере.
Задача. Определить минимум L(x) = (50-х)2 на интервале х = (20;70) с
точностью ε =5.
Решение
1. Выбираем точку х1= (а+b)/2, в середине интервала (а;b)
х1 =(20+70)/2 = 45.
2. Определяем точки x2 = x1 - (Е/2), x3 = x1 + (Е/2), Предварительно
выберем Е из условия: Е < 0.1'* ε, где ε – требуемая точность расчета равная
конечному интервалу неопределенности поведения исследуемой функции.
Для удобства вычислений возьмем Е = 0,4, тогда Е/2 = 0,2.
x2 = 45- 0,2 = 44,8; x3 = 45 + 0,2 = 45,2;
L(x2) = 27,04 ; L(x3) = 23,04.
3. Сравниваем L(х2) и L(x3). L(х2) > L(x3), следовательно исключаем
интервал (20 ; 44.8) и полагаем а’ = 44,8.
4. Сравниваем ε и (а’; b): 5 < 25,2 следовательно продолжаем
вычисления на новом интервале (a’; b) = (44,8; 70), действуя согласно п.2 и
п.3а. метода дихотомии до получения интервала неопределенности
поведения функции ≤ ε.
Для удобства результаты решения будем отображать в таблице 1
Таблица 1
номер
шага
1
2
3
4
Итого
x1
x2
x3
L(x2)
L(x3)
(а;b)
d
45
57,4
51
48,2
50,8
44,8
57,2
50,8
48
48,4
45,2
57,6
51,2
48,4
51,2
27,04
51,84
0,64
4
2,56
23,04
57,76
1,44
2,56
1,44
20;70
44,8; 70
44,8;57,2
45,2;51,2
48,4;51,2
50
25,2
12,4
6
2,8
128
Вычисления закончены на 4 шаге т.к. d’ < ε; 2,8 < 5.
Ответ: L( x * ) = 0,64, x * =50,8.
Проиллюстрируем процесс вычисления графически (рисунок 8):
1 шаг:
2 шаг:
3 шаг:
4 шаг:
Рисунок 8.– Метод дихотомии.
Поиск экстремумов унимодальных функций методом «золотого»
сечения
Сущность метода «золотого» сечения состоит в следующем. Интервал
неопределенности делится на две части так, чтобы отношение длины
большего отрезка (Z1) к длине всего интервала (Z) было бы равно отношению
длины меньшего отрезка (Z2) к большему (Z1). На рис. 9 показан интервал
неопределенности Z, состоящий из отрезков Z1 и Z2, отношение длин
которых определяется правилом «золотого» сечения
z1 z 2
=
(7)
z
z1
Кроме того,
Из (7) следует
z1 + z2 = z
z1 2 = z 2 z
129
(8)
(9)
Подставим z из (8) z = z2 + z1 в (9), получим (10)
z12=z22 + z1z2
Разделим обе части на z12 , получим
(10)
2
z2
z2
+
− 1 = 0.
(11)
z
z1
1
Решая это квадратное уравнение, находим для положительного корня
значение
z2 − 1 + 5
(12)
=
= 0,618
z1
2
Если исследуемый интервал обозначить равным 1, то в соответствии с
(7) и (12) он будет разделен на две неравные части (рисунок 9).
Рисунок 9. – Зависимость интервалов в методе золотого сечения
Алгоритм действий по методу золотого сечения
1.Отложить отрезок Z1 = 0,618 от точки b влево, получим ещё одну
контрольную точку на единичном интервале исследования.
После чего выполнить первые два измерения (вычисления) в двух
контрольных точках x1 и x2 (рисунок 10).
Например, при поиске максимума на интервале исследования, если в
точке x2 измеряемое значение больше чем в точке x1, то новый интервал
неопределенности для унимодальной функции будет от границы интервала
точки а до точки x1 (рисунок 10).
Рисунок 10. – Зависимость интервалов в методе золотого сечения
Таким образом, начальный интервал исследования сократился в 1/0,618
раза.
2. Обозначить полученный новый интервал неопределенности за
единицу. Найти новые две контрольные точки на расстоянии 0,382 его длины
130
от границ нового интервала неопределенности. После чего выполнить одно
новое измерение x3 на интервале исследования. Таким образом, начиная со
второго шага и на каждом последующем шаге алгоритма делается всего одно
новое измерение, так как во второй точке измерение уже было выполнено
(x2) на предыдущем шаге (рисунок 11.)
Рисунок 11. – Зависимость интервалов в методе золотого сечения
Таким образом, на каждом шаге алгоритма интервал неопределенности
сокращается на 1/0,618 раза.
Коэффициент дробления интервала неопределенности для метода
золотого сечения определяется по формуле (13):
(13)
f д = 0,618N−1 ,
где (N –1) – число шагов, а N-число измерений на интервале
исследования.
Достоинства метода «золотого сечения»:
– для сокращения интервала неопределенности на каждом шаге
начиная со второго делается всего одно измерение на интервале
исследования для его сокращения;
– удобно рассчитывать требуемую точность сокращения интервала
исследования (fд), определяя при этом необходимое количество измерения
(N) по выражению (13).
Пример решения задачи методом «золотого» сечения
Суть метода «золотого» сечения демонстрируется на том же
простейшем примере.
Задача. Определить минимум L(x) = (50-х)2 на интервале х = (20;70) с
точностью ε =5.
Решение
1. Определим точку золотого сечения в интервале поиска минимума
функции (20;70), вычислив τ = 0,618*d; τ = 0,618*50 = 30,9.
2. Определим точки x1 и x 2 :
x1 = 20 + 30,9 = 50,9.
x 2 = 70 – 30,9 = 39,1;
3. Вычислим значение функции в точках x1 и x 2 :
L( x1 ) = 0,81, L( x 2 ) = 118,81.
131
Определяем исключаемый интервал. Так как L( x1 ) < L( x 2 ) то
исключаем границы интервала неопределенности (а;x2) a’ = x2, d’ = b - a’ =
30,9. Проверяем метод на окончание поиска, т.к. d’ > ε, то продолжаем поиск
минимума функции согласно п.п.1-3 на втором шаге алгоритма уже для
интервала неопределенности d’= 30,9, и т.д. до выполнения условия di < ε, где
i – номер шага алгоритма.
4. Сведем результаты вычислений на каждом шаге в таблицу 1
Таблица 1
номер
шага
1
2
3
4
5
Итого
x1
x2
L(x1)
L(x2)
(а;b)
d
50,9
58,2
50,9
53,7
50,9
50,9
39,1
50,9
46,4
50,9
49,2
49,2
0,81
67,24
0,81
13,69
0,81
0,81
118,81
0,81
12,96
0,81
0,64
0,64
20;70
39,1;70
39,1;58,2
46,4;58,2
46,4;53,7
46,4;50,9
50
30,9
19,1
11,8
7,3
4,5
Вычисления закончены после 5 шага т.к. d5 < ε; 4,5 < 5.
Ответ: L( X * )=0,64, X * =49,2.
Проиллюстрируем процесс вычисления графически (рисунок 12):
1 шаг:
2 шаг:
3 шаг:
4 шаг:
5 шаг:
132
Рисунок 12. – Метод золотого сечения.
Сравнительная оценка однокритериальных методов оптимизации
1. Наиболее простыми задачами нелинейного программирования
являются задачи одномерной оптимизации рассмотренные выше,
содержащие только целевую функцию и интервал исследования.
2. Точность поиска экстремума задается либо конечным интервалом
неопределенности, либо коэффициентом дробления.
3. Нельзя однозначно говорить о предпочтении того или иного метода
с точки зрения их эффективности. Эффективность метода зависит от условий
ограничений, в которых происходит моделирование (проведение
эксперимента).
Метод общего поиска предпочтительнее применять на начальном этапе
анализа процесса (проведения эксперимента), он может быть применен и не
только для унимодальной функции. В рассматриваемом примере получена
требуемая точность ε =5 за один шаг но путём 20 измерений на интервале
исследования.
Метод деления отрезка пополам самый эффективный с точки зрения
доли сокращения интервала неопределенности за один шаг (в 2 раза), но
требует на каждом шаге лишнее вычисление (определение) искомой целевой
функции. В рассматриваемом примере получена точность ε =3,125 < 5 за 4
шага после проведения 9 измерений на интервале исследования.
Метод дихотомии требует всего два вычисления (определения)
целевой функции на каждом шаге, если искомый функционал не
чувствителен к независимым факторам, то диапазон неопределенности будет
на каждом шаге сокращаться медленнее. В рассматриваемом примере
получена точность ε = 2,8 < 5 за 4 шага после проведения 8 измерений на
интервале исследования.
Метод золотого сечения сокращает диапазон неопределенности даже
после одного изменения независимого фактора, но на каждом шаге
сокращение происходит только в 1/0,618 раз, т.е. не так эффективно как в
методе деления пополам или в методе дихотомии. В рассматриваемом
примере получена точность ε =4,5 < 5 за 5 шагов после проведения всего 6
измерений на интервале исследования.
Выводы:
133
1) В рассматриваемом примере максимальную точность показал метод
дихотомии – за 4 итерации ε =2,8 после 8 измерений; следующий по точности
метод деления интервала пополам – за 4 итерации ε = 3,125 после 9
измерений; менее точный метод золотого сечения – за 5 итераций ε =4,5, но
после всего 6 измерений переменной x.
2) Решение примера по сокращению интервала неопределенности
различными методами показало, что методы сокращения интервала
неопределенности исследуемой функции (поведения системы) надо
применять в зависимости от качества модели и условий, в которых
проводятся эксперименты, от стоимости и возможности проведения каждого
измерения на интервале исследования.
3) Все рассмотренные методы имеют строгий итерационный алгоритм,
поэтому подлежат удобной компьютерной программной реализации.
Решить самостоятельно (по варианту указанному преподавателем)
типовые задачи №№ 1-10 по сокращению заданных интервалов
неопределенности
поведения
однокритериальной
унимодальной
функции с заданной точностью – ε. Решение выполнить методами
общего поиска, МДИП, методом дихотомии и методом «золотого»
сечения. Сделать сравнительный анализ эффективности применяемых
методов по поиску экстремума унимодальной функции с заданной
точностью. Быть готовым своё решение пояснить на практическом
занятии по дисциплине.
Задача 1
L(X) = (100 - X)2 → min на интервале 60 X 150, ε 5;
Задача 2
L(X) = (2X)2 + 7(16/X) → min на интервале 1 X 5, ε 0,5;
Задача 3
L(X) = (-3 X)3 +(3X)2 + 9X +10 → max на интервале -0,2 X 3,8, ε 1;
Задача 4
L(X) = (50 – X 2 + X)2 → max на интервале 20 X 120, ε 5;
Задача 5
L(X) = (-3 X)2 -5X + 20 → min на интервале -6 X 6, ε 1
Задача 6
L(X) = (5X)5 + (16/X)2 → min на интервале 10 X 50, ε ≤ 2;
Задача 7
L(X) = X3 -3X + 1 → min на интервале -1,5 X 1,5, ε 0,5;
134
Задача8
L(X) = X 4 + X → max на интервале -1 X 1 , ε 0,2;
Задача 9
L(X) = X2 +3X - 2 → min на интервале -3 X 0, ε 0,5
Задача 10
L(X) = -2X2 - 4X +6 → max на интервале -3 X 1, ε ≤ 0,5;
2.5.2. Применение критерия достаточности в задачах поиска экстремума
функции произвольной размерности
Метод случайного поиска
Методы поиска экстремумов функции нескольких переменных можно
разделить на три класса в соответствии c типом информации, используемой
при реализации того или иного метода:
1. Методы прямого поиска, основанные на вычислении только значения
целевой функции.
2. Градиентные методы, в которых используются точные значения
первых производных L(X).
3. Методы второго порядка,
в которых наряду с первыми
производными используются также вторые производные L(X).
С целью избежать большого числа вычислений целевой функции от nпеременных, в особенности если n > 2, на начальном этапе поиска
экстремума функции применяется метод случайного поиска.
В последствии, после
выделения методом случайного поиска
перспективной области, для последующих измерений функции и поиска ее
экстремума применяются методы исключения интервалов.
В многомерном, пространстве необходимое число вычислении целевой
функции, с целью определения требуемого интервала (области)
неопределенности возрастает как степенная функция, т.е.
N = Dn,
(1)
где N - необходимое число измерений каждой из n-переменных на
своем интервале неопределенности,
D – число интервалов дробления каждой переменной, n - число
переменных. Например, если fд = 0,1, то N = 10n.
Метод случайного поиска позволяет независимо от размерности
исследуемой области (интервала) определять с вероятностью P минимальное
число вычислений каждой из n-переменных целевой функции, необходимое
для попадания в перспективную область, с целью последующего
135
исследования целевой функции. Значения n-переменных при этом
выбираются случайным образом.
Под перспективной областью понимается область, где исследуемая
функция изменяется в нужном направлении, т.е. оптимизируется.
Метод случайного поиска основан на зависимости Брукса (английский
ученый,
обосновавший зависимость на примере единичного куба в
1958году):
P = l - (1- fд )N,
(2)
ln(1 − P)
откуда
N=
,
(3)
ln(1 − f д )
где P - вероятность того, что выбранная случайным образом ячейка
(одна из тысячи в кубе Брукса, при fд.= 0,1) войдет в число перспективных
ячеек, где существует искомый экстремум функции;
f д - доля перспективных ячеек (соответствующая 10% в кубе Брукса при
fдр = 0,1).
N - искомое минимально необходимое число измерений (испытаний),
после проведения которых можно утверждать с вероятностью Р, что
экстремум функции лежит в перспективной области.
Для единичного куба Брукса минимально-необходимое количество
вычислений значений функции для определения экстремума функции с
заданной точностью, приведено в таблице 1.
Таблица 1– Зависимость доли перспективных ячеек от вероятности
fд
0,1
0,05
0,01
0,005
Р
0,8
16
32
161
322
0,9
22
25
230
460
0,95
29
59
299
598
0,99
44
300
459
919
Таким образом, порядок решения задачи методом случайного поиска
заключается в следующем:
1. Определяется количество, вычислений N, в зависимости от заданных:
перспективной области поиска - f д и вероятности достижения цели Р.
2. Случайным образом выбираются N точек в n-мерном пространстве.
3. Вычисляются значения многомерной функции в выбранных точках
4. Из полученных значений выбирается наилучшее по заданным
критериям.
Достоинства метода случайного поиска:
1) метод пригоден для любой целевой функции, независимо от того,
является она унимодальной или нет;
2) вероятность
успеха при попытках не зависит от размерности
рассматриваемого пространства, а зависит от заданной точности искомого
136
результата поиска - величины f д и доверительной вероятности утверждения
о результате поиска - Р.
Хотя этот метод не позволяет непосредственно найти оптимальное
решение, он создает предпосылки для применения в дальнейшем других
методов поиска, поэтому его часто применяют в сочетании с одним или
несколькими методами других типов (например с методами исключения
интервалов рассмотренными выше).
Пример решения задачи методом случайного поиска
Задача. Определить максимальное значение поверхности заданной в
трехмерном пространстве в виде функции F(x)=3х2 + 2у – z, если границы
поиска определены для каждой переменной в следующих интервалах:
х = (-2;4), у = (2;2), z = (0;l). Поиск осуществить с доверительной
вероятностью не менее 0,5, обеспечив при этом получение максимального
результата с точностью не более чем 10% от всей исследуемой поверхности.
Решение
1.Определим минимально необходимое количество вычислений
функции при поиске ее экстремума с заданной точностью и требуемой
вероятностью утверждения:
Р = 1 - (1 - f д )N,
ln(1 − P) ln(1 − 0,5) ln 0,5
N=
=
=
6,27 .
ln(1 − f д ) ln(1 − 0,1) ln 0,9
Таким образом, минимально необходимое количество вычислений
функции с изменением каждой из трех переменных равно 7.
2. Случайным образом выберем N точек из заданных интервалов поиска
для каждой переменной и вычислим в них значения функции F(x).
x = -1; у = l;
z = 0;
F(x) 5;
x = 0; у = - l;
z = 0,5;
F(x) -2,5;
x = 1; у = 0;
z = 0,7;
F(x) 2,3;
x = 2; у = 2;
z = 0,8;
F(x) 15,2;
x = 3; у = 0,5; z = 0,9;
F(x) 27,1;
x = 4; у = l,5; z = 1;
F(x) 50;
x =1,5; у = 0,4; z = 0,2;
F(x) 6,69.
3. Из полученных значений F(x) выберем максимальное, что и будет
являться максимальным значением поверхности, описанной заданной
функцией в заданных интервалах изменения параметров, с вероятностью
утверждения не менее 0,5 и точностью не менее 10%.
Ответ: F(x) 50 при x = 4; у = 1,5; z = 1.
Решить задачи методом случайного поиска
Задача 1
137
Каждый из трех параметров настройки средств р/св. может иметь 10
различных фиксированных значений, При этом, устойчивая р/св. на
максимальное расстояние будет обеспечена при наиболее удачно
подобранных значениях каждого из трех параметров, составляющих в своей
совокупности 15% от общего числа возможных изменений параметров
средств радиосвязи.
Определить необходимое число изменений, методом случайного поиска,
каждого из трех параметров при настройке средств р/св., которое позволило
бы, с вероятностью 0,99 утверждать, что радиосвязь будет устойчиво
обеспечена на максимальное расстояние при выбранных значениях
проектных параметров.
Решить задачу также для вероятностей обеспечения устойчивой р/связи
0,9; 0,98 и провести сравнительный анализ полученных результатов.
Задача 2
Число возможных фиксированных значений каждого из 4-х параметров
средств р/св, равно 10, при этом известно, что при изменении первого
параметра в 4-х случаях из 10 не будет увеличения дальности связи.
Аналогичная ситуация происходит при изменении 2-го параметра в 5-ти
случаях из 10, 3-го параметра в 6-ти случаях из 10, 4-го параметра в 3-х
случаях из 10. При каких конкретно значениях каждого из 4-х параметров это
происходит, неизвестно.
Определить методом случайного поиска, с какой вероятностью будет
обеспечено увеличение дальности связи, в зависимости от выбранных
значений 4-х различных параметров радиосредств и АФУ, если
предполагается провести 20 сеансов по организации радиосвязи.
Задача 3
Организуется радиосвязь на максимальное расстояние между пунктами
наблюдения.
С этой целью, планируется проведение 10 сеансов радиосвязи.
Устойчивую радиосвязь на максимальное расстояние в ходе проведения
каждого из сеансов связи возможно обеспечить путем изменения 5
параметров средств радиосвязи, причем каждый из параметров имеет 5
фиксированных значений.
Требуется определить, методом случайного поиска, какую часть из
возможного числа комбинаций параметров средств связи должны составить
комбинации, которые позволили бы после проведения указанного количества
сеансов радиосвязи обеспечить устойчивую радиосвязь на максимальное
расстояние с вероятностью а) 0,8; б) 0,99.
Поиск экстремума функции методом Хука-Дживса
(методом прямого поиска)
138
По существу процедура Хука-Дживса представляет собой комбинацию
"исследующего" поиска и поиска по образцу с использованием определенных
эвристических правил. Исследующий поиск ориентирован на выявление
характера локального поведения целевой функции и определение
направлений, вдоль "оврагов". Полученная в результате исследующего
поиска информация, затем используется в процессе поиска по образцу при
движении по "оврагам".
Исследующий поиск. Для проведения исследующего поиска
необходимо задать величину шага, которая может быть различной для
разных координатных направлений и изменяться в процессе поиска.
Исследующий поиск начинается в некоторой исходной точке. Если значение
целевой функции в пробной точке становится оптимальнее чем значение
функции в исходной точке, то шаг поиска рассматривается как успешный. В
противном случае необходимо вернуться в предыдущую точку и сделать шаг
в другом направлении, с последующей проверкой значения целевой функции.
После перебора всех N прямоугольных координат исследующий поиск
завершается. Полученную в результате успешного шага поиска точку
называют базовой точкой. Далее, используя исходную точку и базовую
точку, выполняют поиск по образцу.
Поиск по образцу. Поиск по образцу заключается в реализации
единственного шага из полученной базовой точки вдоль прямой,
соединяющей эту точку с предыдущей базовой (исходной) точкой. Новая
точка образца определяется в соответствии с формулой (1):
Xp(k+1) = X(k) + (X(k) – X(k-1))
(1)
Как только движение по образцу не приводит к оптимизации целевой
функции, точка Xp(k+1) фиксируется в качестве временной базовой точки и
относительно нее вновь проводится исследующий поиск. Если в результате
исследующего поиска получается точка с лучшим значением целевой
функции, чем в точке X(k), то она рассматривается как новая базовая точка и
относительно нее и значения X(k) предыдущего шага проводится поиск по
образцу.
С другой стороны, если исследующий поиск неудачен, необходимо
вернуться в точку X(k) и провести исследующий поиск, с целью выявления
нового направления оптимизации целевой функции.
В конечном счете, возникает ситуация, когда ни поиск по образцу, ни
исследующий поиск не приводит к успеху. В этом случае требуется
уменьшить величину шага исследующего поиска в базовой точке путем
введения некоторого множителя α и возобновить исследующий поиск.
Поиск завершается, когда величина шага исследующего поиска в
базовой точке становится равной или меньшей требуемой точности поиска
(ε) при этом функция более не оптимизируется.
Последовательность точек, получаемую в процессе реализации метода,
можно записать в следующем виде:
X( k) - текущая базовая точка;
139
X( k-1) - предыдущая базовая (исходная) точка;
Xp(k+1) - точка, построенная при движении по образцу, она же является
новой базовой точкой для движения по образцу на очередном шаге метода;
Приведенная ниже последовательность характеризует логическую
структуру поиска по методу Хука-Дживса.
Шаг 1. Определить:
начальную точку Х(0),
величину шага исследующего поиска X i , i =1,2,3,...,n,
коэффициент уменьшения шага > 1,
параметр окончания поиска > 0.
Шаг 2. Провести исследующий поиск.
Шаг 3. Был ли исследующий поиск удачным (найдена ли точка с более
оптимальным значением целевой функции)?
Да: перейти к шагу 5.
Нет: продолжать исследующий поиск в других направлениях поиска,
если и в других направлениях исследующий поиск неудачен перейти к шагу
4.
Шаг 4. Проверка на окончание поиска.
Выполняется ли неравенство i ?
Да: прекратить поиск;
текущая точка аппроксимирует точку
оптимума X*.
Нет: уменьшить приращения по формуле: X i' = X i /
и перейти
к шагу 2.
Шаг 5. Провести поиск по образцу: Xp(k+1) = X( k) + (X( k) – X( k-1)).
Шаг 6. Провести поиск по образцу, используя Xp(k+1) в качестве новой
базовой точки, положив при этом X( k) = X( k-1), а Xp(k+1) = X( k).
Действия согласно шагов 5 и 6 выполнять до тех пор, пока целевая
функция будет оптимизироваться в выбранном направлении поиска. В случае
неудачи поиска перейти к шагу 7.
Шаг 7. Провести исследующий поиск в точке Xp(k+1) последнего шага
поиска по образцу. Был ли исследующий поиск удачным (найдена ли точка
с более оптимальным значением целевой функции)?
Да: перейти к шагу 5.
Нет: вернуться в точку X(k) – базовую точку, где целевая функция была
наиболее оптимальна и перейти к шагу 2.
Пример решения задачи методом Хука-Дживса
f ( x) = 8 x12 + 4 x1 x2 + 5 x22 ,
Задача. Найти точку минимума функции
используя начальную точку с координатами Х(0) = [- 4, - 4].
Решение
Для того, чтобы применить метод Хука-Дживса, необходимо задать
следующие величины:
140
Х - векторная величина приращения по обеим переменным - [1,1],
- коэффициент уменьшения шага = 2,
- параметр окончания поиска =10-4.
Итерации начинаются с исследующего поиска вокруг, точки Х(0),
которой соответствует значение функции f(X(0)) = 272. Фиксируя x2, дадим
приращение переменной x1:
x2= -4,
x1 = -4 + 1 → f(-3,-4) = 200 < f (X(0)) → успех.
Следовательно, необходимо зафиксировать x1 = -3 и дать приращение
переменной x2:
x1 = -3, x2 = -4 + 1 → f(-3,-3) = 153 < 200 → успех.
Таким образом, в результате исследующего поиска найдена точка:
X(1)= [-3;3],
f (Х(1)) = 153.
Поскольку исследующий поиск был удачным, переходим к поиску по
образцу, который также оказывается успешным:
Xp(2)= X(1) + (X( 1) – X( 0)) = [-2,-2],
f (Хp(2)) = 68 → успех.
Далее проводится поиск по образцу, где в качестве базовой точки
выступает Хр(2), в результате получаем точку:
Xp(3)= X(2) + (X( 2) – X( 1)) = [-1,-1],
f (Хp(3)) = 17 → успех.
Далее проводится поиск по образцу, где в качестве базовой точки
выступает Хр(3), в результате получаем точку:
Xp(4)= X(3) + (X( 3) – X( 2)) = [0,0],
f (Хp(4)) = 0 → успех.
Далее проводится поиск по образцу, где в качестве базовой точки
выступает Хр(4), в результате получаем точку:
Xp(5)= X(4) + (X( 4) – X( 3)) = [1,1],
f (Хp(5)) = 17 → нет успеха.
Поиск по образцу не привел к уменьшению целевой функции, тем не
менее проведем исследующий поиск вокруг точки Xp(5), при использовании
приращения = [1,1], так при Xp(5) = [2,1] f(Хp (5)) = 45 → нет успеха, при
Xp(5) = [1,2] f (Хp (5)) = 36 → нет успеха, при Xp(5) = [0,1] f (Хp (5)) = 5 → нет
успеха, при Xp(5) = [1,0] f (Хp (5)) = 8 → нет успеха, т.е. во всех случаях
f (Хp(4)) < f (Хp(5)). Необходимо вернуться в точку Xр(4) = [0,0] и уменьшить
шаг приращения аргументов функции x1 и x2.
X i' = X i / X i' = 1 / 2 , подучим '= 0,5 по обеим переменным.
Проводим исследующий поиск,
используя
новое приращение
аргументов функции, получим:
x1 = 0 + 0,5 → f(0,5;0) = 2 > f (X(4)) → нет успеха.
x2 = 0 + 0.5 → f(0;0,5) = 1,25 > f (X(4)) → нет успеха.
Проверим алгоритм на возможность окончания поиска: X i / = 1 / 2
, следовательно необходимо продолжить сокращать длину шага поиска:
X i'' = 1 / 4 и повторять исследующий поиск в точке Xр(4) = [0,0], до тех пор
пока длина шага равная 1/ в последней базовой точке с наименьшим
значением целевой функции не будет равна или меньше заданной величины
ε. В рассматриваемом примере не сложно убедиться, что этой последней
базовой точкой и будет точка X(4) = [0,0], где f (Хp(4)) = 0.
141
Ответ: Минимум функции f ( x) = 8 x12 + 4 x1 x2 + 5 x22 с точностью 8,6 10 −5
(при = 11648 ) равен 0 в точке с координатами X* = [0,0].
Решить задачи методом Хука-Дживса
Задача 1
Найти точку минимума функции f ( x) = 2 x12 + 4 x1 x23 − 10 x1 x2 + x22
используя начальную точку Х(0) = [-3;-3],
Х - векторная величина приращения = [1,1],
- коэффициент уменьшения шага = 2,
- параметр окончания поиска 0,3.
Задача 2
Найти точку минимума функции f ( x) = ( x12 + x2 − 11) 2 + ( x1 + x22 − 7) 2 ,
используя начальную точку Х(0) = [0;0],
Х - векторная величина приращения = [1,1],
- коэффициент уменьшения шага = 2,
- параметр окончания поиска 0,25.
Задача 3
Найти точку минимума функции f ( x) = 4 x12 + 3 x23 − 4 x1 x2 + x1 , используя
начальную точку Х(0) = [-4;-2],
Х - векторная величина приращения = [1,1],
- коэффициент уменьшения шага = 2,
- параметр окончания поиска 0,25.
Задача 4
Найти точку минимума функции f ( x) = 4 x12 + 3 x23 − 4 x1 x2 + x1 , используя
начальную точку Х(0) = [-4;-3],
Х - векторная величина приращения = [2,2],
- коэффициент уменьшения шага = 2,
- параметр окончания поиска 0,1.
Задача 5
Найти точку минимума функции 𝑓(𝑥) = 8𝑥1 + 4𝑥1 𝑥2 + 5𝑥2 ,, используя
начальную точку Х(0) = [-4;-4],
Х - векторная величина приращения = [1,1],
- коэффициент уменьшения шага = 2,
- параметр окончания поиска 0,2.
Задача 6
Найти точку минимума функции 𝑓(𝑥) = (𝑥1 − 𝑥2 )2 + (𝑥1 2 − 𝑥2 + 2)2 ,
используя начальную точку Х(0) = [0;0],
142
Х - векторная величина приращения = [0,3,0,3],
- коэффициент уменьшения шага = 2,
- параметр окончания поиска 0,02.
Задача 7
Найти точку минимума функции 𝑓(𝑥) = 3𝑥1 + 4𝑥1 𝑥2 + 4𝑥2 ,, ,
используя начальную точку Х(0) = [3;4],
Х - векторная величина приращения = [1,1],
- коэффициент уменьшения шага = 2,
- параметр окончания поиска 0,1.
Задача 8
Найти точку минимума функции 𝑓(𝑥) = (𝑥1 − 11)2 + (𝑥2 − 3)2 ,
используя начальную точку Х(0) = [0;0],
Х - векторная величина приращения = [1,1],
- коэффициент уменьшения шага = 1,
- параметр окончания поиска 0,3.
ЗАКЛЮЧЕНИЕ
Настоящее учебное пособие предназначено прежде всего для студентов
факультета информационных систем и технологий и по своему содержанию
и последовательности изложения материала соответствует изучаемым темам
согласно рабочих программ по дисциплине «Системы поддержки принятия
решений».
Учебное пособие в электронном издании позволит преподавателям:
наглядно демонстрировать на лекциях содержание излагаемых методов
математического моделирования, пояснять на решённых примерах их
графическую и табличную часть; разъяснять порядок решения задач с
использованием различных методов оптимизации на основе критериев
оптимальности или достаточности, начиная от формулировки задачи на
принятие решения лицом принимающим решение (ЛПР), процесса
проведения вычислений с применением ПЭВМ, до получения конечного
результата.
Учебное пособие в электронном издании позволит студентам:
использовать подготовленные в учебном пособии шаблоны для их ввода в
143
электронные таблицы ПЭВМ и последующего поиска оптимального решения
тем или иным методом; рисунки представленные в учебном пособии
позволят обеспечить обучаемым наглядное восприятие содержания того или
иного метода, для его последующего осознанного применения при
самостоятельной работе с индивидуальным заданием на практическом
занятии; для оперативной работы с практическими заданиями по тому или
иному методу разработать программное решение на любом языке
программирования высокого уровня, так как все рассматриваемые в учебном
пособии методы поиска оптимального решения или поиска решения с
достаточной точностью, являются итерационными процессами и каждая
итерация подробно описана в настоящем пособии, что позволит обучаемому
написать программный код для вычислительных процессов согласно
указанному в пособии алгоритму.
Учебное пособие возможно применять и на других факультетах
института – там, где рассматриваются прикладные направления математики,
где для вычислений используется ПО MS Excel, в особенности на
экономическом факультете института, кафедре менеджмента.
Цели и задачи в рамках дисциплины «Системы поддержки принятия
решений» могут иметь очень широкий спектр проблем и задач для их
решения; современные возможности ЭВМ позволяют решать в рамках СППР
задачи с использованием систем искусственного интеллекта на основе
экспертных систем, нейронных сетей, систем распознавания образов; но
данные направления рассматриваются на факультете информационных
систем в рамках дисциплин связанных с искусственным интеллектом.
РЕКОМЕНДУЕМЫЕ ИНФОРМАЦИОННЫЕ ИСТОЧНИКИ
1. Аксенов, К. А. Системы поддержки принятия решений в 2 ч. Часть 1
: учебное пособие для вузов / К. А. Аксенов, Н. В. Гончарова ; под научной
редакцией Л. Г. Доросинского. — Москва : Издательство Юрайт, 2022. —
103 с. — (Высшее образование). — ISBN 978-5-534-07640-0. — Текст :
электронный // Образовательная платформа Юрайт [сайт]. — URL:
https://urait.ru/bcode/494072
2. Системы поддержки принятия решений в 2 ч. Часть 2 : учебное
пособие для вузов / К. А. Аксенов, Н. В. Гончарова, О. П. Аксенова ; под
научной редакцией Л. Г. Доросинского. — Москва : Издательство Юрайт,
2022. — 126 с. — (Высшее образование). — ISBN 978-5-534-07642-4. —
Текст : электронный // Образовательная платформа Юрайт [сайт]. — URL:
https://urait.ru/bcode/494094
3. Болотова, Л. С. Системы поддержки принятия решений в 2 ч. Часть 1
: учебник и практикум для вузов / Л. С. Болотова ; ответственные редакторы
В. Н. Волкова, Э. С. Болотов. — Москва : Издательство Юрайт, 2023. — 257
с. — (Высшее образование). — ISBN 978-5-9916-8250-3. — Текст :
144
электронный // Образовательная платформа Юрайт [сайт]. — URL:
https://urait.ru/bcode/512250
4. Болотова, Л. С. Системы поддержки принятия решений в 2 ч. Часть 2
: учебник и практикум для вузов / Л. С. Болотова ; ответственные редакторы
В. Н. Волкова, Э. С. Болотов. — Москва : Издательство Юрайт, 2023. — 250
с. — (Высшее образование). — ISBN 978-5-9916-8251-0. — Текст :
электронный // Образовательная платформа Юрайт [сайт]. — URL:
https://urait.ru/bcode/513142
5. Граецкая, О. В. Информационные технологии поддержки принятия
решений : учебное пособие / О. В. Граецкая, Ю. С. Чусова. — Ростов-наДону, Таганрог : Издательство Южного федерального университета, 2019. —
130 c. — ISBN 978-5-9275-3123-3. — Текст : электронный // Цифровой
образовательный
ресурс
IPR
SMART
:
[сайт].
—
URL:
https://www.iprbookshop.ru/95779.html
6. Кучуганов, В. Н. Информационные системы: методы и средства
поддержки принятия решений : учебное пособие / В. Н. Кучуганов, А. В.
Кучуганов. — Москва : Ай Пи Ар Медиа, 2020. — 247 c. — ISBN 978-5-44970530-3. — Текст : электронный // Цифровой образовательный ресурс IPR
SMART : [сайт]. — URL: https://www.iprbookshop.ru/97179.html
7. Системы поддержки принятия решений : учебник и практикум для
вузов / В. Г. Халин [и др.] ; под редакцией В. Г. Халина, Г. В. Черновой. —
Москва : Издательство Юрайт, 2023. — 494 с. — (Высшее образование). —
ISBN 978-5-534-01419-8. — Текст : электронный // Образовательная
платформа Юрайт [сайт]. — URL: https://urait.ru/bcode/511245
СИСТЕМЫ ПОДДЕРЖКИ ПРИНЯТИЯ
РЕШЕНИЙ
145
ЭЛЕКТРОННОЕ УЧЕБНОЕ ИЗДАНИЕ
© Северо-Кавказский социальный институт, 2023
Юридический адрес: 355012, г.Ставрополь, ул.Голенева, 59а
Почтовый адрес: 355012, г.Ставрополь, ул.Голенева, 59а
ЭЛЕКТРОННОЕ ИЗДАНИЕ СЕТЕВОГО РАСПРОСТРАНЕНИЯ
146