МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное
учреждение высшего образования
«Южно-Уральский государственный университет
(национальный исследовательский университет)»
Высшая школа электроники и компьютерных наук
Кафедра систем автоматического управления
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
по дисциплине «Исследование операций»
Руководитель:
доцент кафедры САУ
Брагина А.А.
Автор работы:
студент группы
КЭ-304
Иванов Я.А.
Работа защищена с оценкой
«___» ______________2024 г.
Челябинск 2024
ОГЛАВЛЕНИЕ
1. ГРАФИЧЕСКОЕ РЕШЕНИЕ ЗАДАЧИ ДВУМЯ СПОСОБАМИ В РАЗНЫХ
СИСТЕМАХ КООРДИНАТ, НАХОЖДЕНИЕ ИНТЕРВАЛОВ ИЗМЕНЕНИЯ
КОЭФФИЦИЕНТОВ ЦЕЛОВОЙ ФУНКЦИИ, В КОТОРЫХ ОПТИМАЛЬНОЕ
РЕШЕНИЕ ЗАДАЧИ ОСТАЕТСЯ НЕИЗМЕННЫМ .............................................. 4
1.1. Первый способ........................................................................................ 5
1.2. Второй способ ........................................................................................ 8
2.
РЕШЕНИЕ
ИСХОДНОЙ
ЗАДАЧИ
ДВУХФАЗНЫМ
СИМПЛЕКС-
МЕТОДОМ, НАХОЖДЕНИЕ min𝑓 И max𝑓 .......................................................... 12
2.1. Нахождение min𝑓 ................................................................................. 15
2.2. Нахождение max𝑓 ................................................................................ 17
3.
НАХОЖДЕНИЕ
ПЛАНА
С
ЦЕЛОЧИСЛЕННЫМИ
ЗНАЧЕНИЯМИ
МЕТОДОМ ГОМОРИ ДЛЯ max𝑓 ........................................................................... 19
3.1. Нахождение max𝑓 с целочисленными значениями .......................... 21
4. СОСТАВЛЕНИЕ ДВОЙСТВЕННОЙ ЗАДАЧИ И НАХОЖДЕНИЕ ЕЕ
ОПТИМАЛЬНОГО РЕШЕНИЯ МЕТОДОМ КАНТОРОВИЧА .......................... 25
4.1. Составление двойственной задачи и нахождение оптимального
решения с помощью критерия Канторовича для min𝑓 ...................................... 26
4.2. Составление двойственной задачи и нахождение оптимального
решения с помощью критерия Канторовича для max𝑓 ..................................... 27
5. ПРОВЕРКА НА ОПТИМАЛЬНОСТЬ НАЙДЕННОГО МЕТОДОМ ГОМОРИ
ПЛАНА КРИТЕРИЕМ КАНТОРОВИЧА ............................................................... 28
6. БИБЛИОГРАФИЧЕСКИЙ СПИСОК ................................................................. 29
3
1. ГРАФИЧЕСКОЕ РЕШЕНИЕ ЗАДАЧИ ДВУМЯ СПОСОБАМИ В РАЗНЫХ СИСТЕМАХ КООРДИНАТ, НАХОЖДЕНИЕ ИНТЕРВАЛОВ ИЗМЕНЕНИЯ КОЭФФИЦИЕНТОВ ЦЕЛОВОЙ ФУНКЦИИ, В КОТОРЫХ ОПТИМАЛЬНОЕ РЕШЕНИЕ ЗАДАЧИ ОСТАЕТСЯ НЕИЗМЕННЫМ
Дана следующая задача линейного программирования:
𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
3𝑥1 + 2𝑥2 − 𝑥3 + 3𝑥4 − 𝑥5 = 8
−𝑥1 + 𝑥2 + 𝑥3 − 𝑥4 = 2
{
−4𝑥1 + 𝑥2 + 2𝑥3 − 3𝑥4 = −2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Для поиска решения воспользуемся основным свойством ЗЛП.
Теорема 1.1. Если ЗЛП имеет решение, то оптимальное значение целевой
функции достигается по крайней мере в одной из угловых точек допустимого
множества.
Данная теорема следует из признака существования оптимального решения ЗЛП и основных свойств выпуклых множеств.
Теорема 1.2. Если в задаче минимизации допустимое множество D не пусто, а целевая функция ограничена снизу на множестве D, то эта задача имеет
оптимальное решение.
Теорема 1.3. Любая точка выпуклого ограниченного множества может
быть представлена в виде выпуклой комбинации конечного числа угловых точек
этого множества.
Согласно теореме 1.1, если ЗЛП имеет решение, то для нахождения ее оптимального плана необходимо исследовать только угловые точки допустимого
множества. Следующая теорема указывает способ нахождения угловых точек
допустимого множества канонической ЗЛП.
4
Теорема 1.4. Точка 𝑥 ∗ допустимого множества канонической задачи тогда
и только тогда будет его угловой точкой, когда она является опорным решением
системы ограничений этой задачи.
В данной ЗЛП разность между числом переменных и числом ограничений
равна двум. Поэтому ее можно свести к эквивалентной ЗЛП с двумя переменными и, решив геометрически полученную задачу, найти решение исходной
ЗЛП. Применим метод Жордана-Гаусса, чтобы преобразовать систему ограничений к равносильной с единичным базисом.
1.1. Первый способ
𝑚𝑎𝑥
𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
𝑚𝑖𝑛
̅̅̅̅̅
𝑥𝑘 ≥ 0, 𝑘 = 1,
5
3
(−1
−4
2
~ ∨ (−1
∨ 2
2 −1 3 −1 8
2
3
0
2 −1 10
1 [1] −1 0
2 ) ~ ∨ (−1 1 [1] −1 0
2)~
1 2 −3 0 −2
ㅤ −2 −1 0 −1 0 −6
3 0
2 −1 10
−2 1 0 0 −1 −2
1 [1] −1 0
2) ~ ∨( 1 2 1 0
0
8 )~
6
1 0 [1] 0
6
∨ 2 1 0 [1] 0
∨ 2 −1 0 0 1 2
~ ∨ (1 2 1 0 0 8)
∨ 2 1 0 [1] 0 6
Составим новую систему ограничений:
2𝑥1 − 𝑥2 + 𝑥5 = 2
{𝑥1 + 2𝑥2 + 𝑥3 = 8
2𝑥1 + 𝑥2 + 𝑥4 = 6
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Уменьшим размерность системы ограничений, выразив базисные переменные через свободные:
5
𝑥5 = 2 − 2𝑥1 + 𝑥2
𝑥3 = 8 − 𝑥1 − 2𝑥2
𝑥4 = 6 − 2𝑥1 − 𝑥2
Найдем целевую функцию:
𝑚𝑎𝑥
𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
𝑚𝑖𝑛
= 6𝑥1 + 4𝑥2 − (8 − 𝑥1 − 2𝑥2 ) + 4(6 − 2𝑥1 − 𝑥2 ) − (2 − 2𝑥1 + 𝑥2 )
= 𝑥1 + 𝑥2 + 14
Новая система ограничений имеет следующий вид:
𝑚𝑎𝑥
𝑓 = 𝑥1 + 𝑥2 + 14
𝑚𝑖𝑛
2𝑥1 − 𝑥2 ≤ 2
{𝑥1 + 2𝑥2 ≤ 8
2𝑥1 + 𝑥2 ≤ 6
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
1) 2𝑥1 − 𝑥2 = 2
2) 𝑥1 + 2𝑥2 = 8
3) 2𝑥1 + 𝑥2 = 6
𝑥1
1
2
𝑥1
8
0
𝑥1
0
3
𝑥2
0
2
𝑥2
0
4
𝑥2
6
0
Найдем вектор градиента:
𝜕𝑧 𝜕𝑧
𝑔𝑟𝑎𝑑 𝑧⃗ = {
;
} = {1; 1}
𝜕𝑥1 𝜕𝑥2
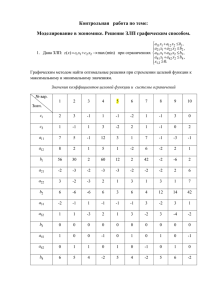
На рисунке 1 изображены построенные графики функций, допустимая область и градиент 𝑧⃗ = {1; 1} целевой функции 𝑓 в системе координат 𝑥1 𝑂𝑥2 .
6
Рисунок 1 – Графическое решение первым способом
Всего на графике пять угловых точек: O, A, E, G, B. Двигаясь вдоль направления градиента по перпендикулярной ему прямой, делаем вывод о том, что минимум функции будет в точке O, а максимум – в точке E.
Находим минимум: это начало координат О(0;0).
min𝑓 = 𝑓(О) = 𝑥1 + 𝑥2 + 14 = 0 + 0 + 14 = 14
Находим максимум:
Е: 1 ∩ 3
Составим систему:
𝑥1 = 4⁄3
𝑥1 + 2𝑥2 = 8
→ {
→ 𝐴(4⁄3 , 10⁄3)
{
10
2𝑥1 + 𝑥2 = 6
𝑥5 = ⁄3
max𝑓 = 𝑓(Е) =𝑥1 + 𝑥2 + 14 = 4⁄3 + 10⁄3 + 14 = 18
2
3
Найдем интервалы изменений целевой функции, в которых оптимальные
решения остаются неизменными.
7
Запишем в общем виде целевую функцию задачи следующим образом:
𝑐1 𝑥1 + 𝑐2 𝑥2 + 𝑑 = 0
Отсюда угловой коэффициент прямой:
𝑐1
𝑘=−
𝑐2
Существуют интервалы изменения коэффициентов 𝑐1 и 𝑐2 , когда текущее
оптимальное решение сохраняется.
Минимум функции будет в точке О. Эта точка перестает быть минимумом
при изменении линии уровня в границах прямых: 𝑥1 = 0 и 𝑥2 = 0.
Интервал изменения коэффициентов целевой функции, в котором оптимальное решение задачи остается неизменным:
𝑐1
𝑐1
0 ≤ − ≤ ∞ → −∞ ≤ − ≤ 0, 𝑐2 ≠ 0
𝑐2
𝑐2
Максимум функции будет в точке Е. Эта точка перестает быть максимумом
при изменении линии уровня в границах прямых: 𝑥1 + 2𝑥2 = 8 и 2𝑥1 + 𝑥2 = 6.
Интервал изменения коэффициентов целевой функции, в котором оптимальное решение задачи остается неизменным:
2
𝑐1
1
𝑐1
− ≤ − ≤ − → 0,5 ≤ ≤ 2, 𝑐2 ≠ 0
1
𝑐2
2
𝑐2
1.2. Второй способ
𝑚𝑎𝑥
𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
𝑚𝑖𝑛
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
∨ −3 −2 1 −3 [1] −8
3 2 −1 3 −1 8
(−1 1 1 −1 0
2 ) ~ ㅤ (−1 1 [1] −1 0
2)~
ㅤ −4 1
−4 1 2 −3 0 −2
2 −3 0 −2
∨ −2 −3 0 −2 1 −10
∨ 4 0 0 1 1 8
−1
1
1
−1
0
2
~∨(
) ~ ∨ (−3 0 1 −2 0 −4)
−2 [−1] 0 −1 0 −6
∨ 2 1 0 1 0 6
8
Составим новую систему ограничений:
4𝑥1 + 𝑥4 + 𝑥5 = 8
{−3𝑥1 + 𝑥3 − 2𝑥4 = −4
2𝑥1 + 𝑥2 + 𝑥4 = 6
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Уменьшим размерность системы ограничений, выразив базисные переменные через свободные:
𝑥5 = 8 − 4𝑥1 − 𝑥4
𝑥3 = −4 + 3𝑥1 + 2𝑥4
𝑥2 = 6 − 2𝑥1 − 𝑥4
Найдем целевую функцию:
𝑚𝑎𝑥
𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
𝑚𝑖𝑛
= 6𝑥1 + 4(6 − 2𝑥1 − 𝑥4 ) − (−4 + 3𝑥1 + 2𝑥4 ) + 4𝑥4
− (8 − 4𝑥1 − 𝑥4 ) = 20 − 𝑥1 − 𝑥4
Новая система ограничений имеет следующий вид:
𝑚𝑎𝑥
𝑓 = 20 − 𝑥1 − 𝑥4
𝑚𝑖𝑛
4𝑥1 + 𝑥4 ≤ 8
{ 2𝑥1 + 𝑥4 ≤ 6
3𝑥1 + 2𝑥4 ≥ 4
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
1) 4𝑥1 + 𝑥4 = 8
2) 2𝑥1 + 𝑥4 = 6
3) 3𝑥1 + 2𝑥4 = 4
𝑥1
0
2
𝑥1
0
3
𝑥1
0
4/3
𝑥4
8
0
𝑥4
6
0
𝑥4
2
0
Найдем вектор градиента:
9
𝜕𝑧 𝜕𝑧
𝑔𝑟𝑎𝑑 𝑧⃗ = {
;
} = {−1; −1}
𝜕𝑥1 𝜕𝑥4
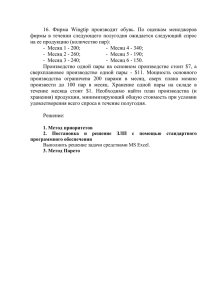
На рисунке 1 изображены построенные графики функций, допустимая область и градиент 𝑧⃗ = {−4; −1} целевой функции 𝑓 в системе координат 𝑥1 𝑂𝑥4 .
Рисунок 2 – Графическое решение вторым способом
Всего на графике пять угловых точек: A, B, C, D, E. Двигаясь вдоль направления градиента по перпендикулярной ему прямой, делаем вывод о том, что максимум функции будет в точке E, а минимум – точка B.
Находим максимум:
E: 𝑂𝑥1 ∩ 2
Составим систему:
𝑥4 = 0
→ 𝐸(4/3, 0)
{
3𝑥1 + 2𝑥4 = 4
10
2
min𝑓 = 𝑓(𝐴) =20 − 𝑥1 − 𝑥4 = 20 − 4⁄3 − 0 = 18
3
Находим минимум:
B: 1 ∩ 𝑂𝑥4
Составим систему:
{
𝑥 =2
𝑥4 = 0
→ { 1
→ 𝐷(2, 0)
4𝑥1 + 𝑥4 = 8
𝑥4 = 0
max𝑓 = 𝑓(𝐵) = 20 − 4𝑥1 − 𝑥4 = 20 − 8 − 0 = 12
Найдем интервалы изменений целевой функции, в которых оптимальные
решения остаются неизменными.
Запишем в общем виде целевую функцию задачи следующим образом:
𝑐1 𝑥1 + 𝑐4 𝑥4 + 𝑑 = 0
Отсюда угловой коэффициент прямой:
𝑐1
𝑘=−
𝑐4
Существуют интервалы изменения коэффициентов 𝑐1 и 𝑐4 , когда текущее
оптимальное решение сохраняется.
Максимум функции будет в точке E. Эта точка перестает быть минимумом
при изменении линии уровня в границах прямых: 𝑥4 = 0 и 2𝑥1 + 𝑥4 − 6 = 0.
Интервал изменения коэффициентов целевой функции, в котором оптимальное решение задачи остается неизменным:
2
𝑐1
𝑐1
− ≤ − ≤ 0 → 0 ≤ ≤ 2, 𝑐4 ≠ 0
1
𝑐4
𝑐4
Минимум функции будет в точке B. Эта точка перестает быть максимумом
при изменении линии уровня в границах прямых: 𝑥1 = 0 и 4𝑥1 + 𝑥4 − 8 = 0.
11
Интервал изменения коэффициентов целевой функции, в котором оптимальное решение задачи остается неизменным:
−∞ ≤ −
𝑐1
4
𝑐1
𝑐1
≤ − → −∞ ≤ − ≤ −4 → 4 ≤ ≤ ∞, 𝑐4 ≠ 0
𝑐4
1
𝑐4
𝑐4
2. РЕШЕНИЕ ИСХОДНОЙ ЗАДАЧИ ДВУХФАЗНЫМ СИМПЛЕКС-МЕТОДОМ, НАХОЖДЕНИЕ min𝒇 И max𝒇
При поиске ответа будем опираться на основные теоремы, необходимые
для исследования и решения ЗЛП симплекс-методом: критерий оптимальности
опорного плана, критерий неограниченности и теорема об улучшении основного
опорного плана.
Теорема 2.1. Если все оценки ∆𝑘 , 𝑘 = 1, 𝑛, содержащиеся в индексной
строке симплексной таблицы неположительны, то основной опорный план данной задачи является оптимальным планом, а значение ∆𝑂 представляет собой
наименьшее значение целевой функции на допустимом множестве.
Теорема 2.2. Если в индексной строке симплексной таблицы канонической
ЗЛП содержится положительная оценка ∆𝑘 , а в столбце переменной 𝑥𝑘 нет ни
одного положительного элемента, то целевая функция данной ЗЛП не ограничена снизу на допустимом множестве, т.е. задача не имеет решения.
Теорема 2.3. Если в индексной строке симплексной таблицы имеется положительная оценка ∆𝑘 , а в столбце переменной 𝑥𝑘 содержится хотя бы один положительный элемент, то для данной ЗЛП возможно такое равносильное преобразование ее простейшей системы ограничений, что при переходе к новому основному опорному плану значение целевой функции не увеличится.
Алгоритм симплекс-метода для канонической ЗЛП с простейшей системой
ограничений состоит из следующих шагов:
1. Составление первой симплексной таблицы.
2. Проверка основного опорного плана на оптимальность. Если в индексной строке все оценки неположительны, то основной опорный план оптимален,
12
а значение ∆𝑂 – наименьшее значение целевой функции на допустимом множестве (согласно теореме 2.1).
3. Проверка задачи на неограниченность. Если в индексной строке содержится положительная оценка, над которой в таблице нет ни одного положительного элемента, то целевая функция не ограничена снизу на допустимом множестве и задача не имеет решения (теорема 2.2).
4. Симплексное преобразование (улучшение основного опорного плана).
Если условия пунктов 2 и 3 данного алгоритма не выполнены, то переходим к
новой симплексной таблице, соответствующей равносильной системе ограничений с другим набором базисных переменных (по теореме 2.3).
Если рассмотреть произвольную каноническую ЗЛП, то ее допустимое
множество может оказаться пустым ввиду несовместности системы ограничений. Метод искусственного базиса позволяет выяснить наличие планов у любой
канонической ЗЛП и в случае допустимости рассматриваемой задачи заменяет
ее систему ограничений на равносильную простейшую, делая возможным применение симплекс-метода.
Решение двухфазным симплекс-методом состоит из трех этапов.
I.
Построение вспомогательной задачи
1. Если данная ЗЛП не является канонической, преобразуем ее к равносильной канонической задаче. Дополнительные переменные, возникающие при
этом преобразовании, не относятся к числу искусственных.
2. Изменяя знаки у обеих частей ограничений полученной канонической
ЗЛП, добиваемся не отрицательности свободных членов во всех уравнениях системы ограничений.
3. Вводя искусственные переменные в те ограничения, которые не содержат базисных переменных, получаем новую простейшую систему ограничений.
4. Составляем вспомогательную задачу, являющуюся задачей минимизации новой целевой функции S, равной сумме всех искусственных переменных, с
системой ограничений, полученной на предыдущем шаге.
13
II.
Решение вспомогательной задачи
Решая вспомогательную задачу симплекс-методом, найдем наименьшее
значение ее целевой функции 𝑆𝑚𝑖𝑛 . Могут представиться следующие возможности:
1. 𝑆𝑚𝑖𝑛 не равняется нулю. Тогда исходная ЗЛП является недопустимой и
не имеет решения.
2. 𝑆𝑚𝑖𝑛 = 0 и среди базисных переменных завершающей симплексной таблицы есть хотя бы одна искусственная. В этом случае выполняем последовательность жордановых исключений, выбирая произвольно по одному ведущему элементу в каждой из строк, соответствующих искусственным базисным переменным. В результате все искусственные переменные будут выведены из числа базисных, а индексная строка и столбец свободных членов симплексной таблицы
не изменятся.
3. 𝑆𝑚𝑖𝑛 = 0 и среди базисных переменных завершающей симплексной таблицы нет ни одной искусственной. В этом случае полученная таблица с вычеркнутыми столбцами искусственных переменных определяет простейшую систему, равносильную системе ограничений исходной канонической задачи.
III.
Решение основной задачи
Заменив систему ограничений исходной канонической ЗЛП найденной
простейшей системой, решаем симплекс-методом полученную задачу.
Для уменьшения объема вычислений при решении вспомогательной задачи после исключения из базиса любой искусственной переменной можно не
заполнять соответствующий ей столбец полученных симплексных таблиц.
Кроме этого, применение двухфазного симплекс-метода приводит к тому, что
для решения ЗЛП вначале приходится решать вспомогательную задачу, а затем
основную. Оба этих этапа позволяют объединить другой не рассматриваемый в
настоящем пособии вариант метода искусственного базиса, называемый M-методом.
14
2.1. Нахождение min𝒇
𝑚𝑎𝑥
𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
𝑚𝑖𝑛
3𝑥1 + 2𝑥2 − 𝑥3 + 3𝑥4 − 𝑥5 = 8
−𝑥1 + 𝑥2 + 𝑥3 − 𝑥4 = 2
{
4𝑥1 − 𝑥2 − 2𝑥3 + 3𝑥4 = 2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Составим для данной ЗЛП вспомогательную задачу:
𝑚𝑎𝑥
𝑆 = 𝑥6 + 𝑥7 + 𝑥8
𝑚𝑖𝑛
3𝑥1 + 2𝑥2 − 𝑥3 + 3𝑥4 − 𝑥5 + 𝑥6 = 8
−𝑥1 + 𝑥2 + 𝑥3 − 𝑥4 + 𝑥7 = 2
{
4𝑥1 − 𝑥2 − 2𝑥3 + 3𝑥4 + 𝑥8 = 2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 7
Построенная симплексная таблица представлена в таблице 1.
Таблица 1 – Решение вспомогательной задачи
x1
x2
x3
x4
x5
x6
x7
x8
0
0
0
0
0
1
1
1
x6
3
2
-1
3
-1
1
0
0
8
1
x7
-1
1
1
-1
0
0
1
0
2
1
x8
4
-1
-2
3
0
0
0
1
2
𝑆
6
2
-2
5
-1
0
0
0
12
1
x6
0
2,75
0,5
0,75
-1
1
0
6,5
1
x7
0
0,75
0,5
-0,25
0
0
1
2,5
0
x1
1
-0,25
-0,5
0,75
0
0
0
0,5
𝑆
0
3,5
1
0,5
-1
0
0
9
Cбаз
xбаз
1
B
15
0
x2
0
1
2/11
3/11
-4/11
0
26/11
1
x7
0
0
4/11 -5/11
3/11
1
8/11
0
x1
1
0
- 5/11
9/11
-1/11
0
12/11
𝑆
0
0
4/11 -5/11
3/11
0
8/11
0
x2
0
1
0
0,5
-0,5
2
0
x3
0
0
1
-1,25
0,75
2
0
x1
1
0
0
0,25
0,25
2
𝑆
0
0
1
-1,25
0,75
2
Так как 𝑆𝑚𝑖𝑛 = 0 и среди базисных переменных завершающей симплексной таблицы нет ни одной искусственной, то полученная таблица с вычеркнутыми столбцами искусственных переменных определяет простейшую систему,
равносильную системе ограничений исходной канонической задачи.
Переходим к решению исходной задачи:
𝑚𝑖𝑛𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
𝑥2 + 0,5𝑥4 − 0,5𝑥5 = 2
{𝑥3 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥1 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Решение симплекс-методом представлено в таблице 2.
16
Таблица 2 – Решение исходной задачи 𝑚𝑖𝑛𝑓
x1
x2
x3
x4
x5
6
4
-1
4
-1
x2
0
1
0
0,5
-0,5
2
-1
x3
0
0
1
-1,25
0,75
2
6
x1
1
0
0
0,25
0,25
2
𝑍
0
0
0
0,75
-0,25
18
4
x4
0
2
0
1
-1
4
-1
x3
0
2,5
1
0
-0,5
7
6
x1
1
-0,5
0
0
0,5
1
𝑍
0
-1,5
0
0
0,5
15
4
x4
2
1
0
1
0
6
-1
x3
1
2
1
0
0
8
-1
x5
2
-1
0
0
1
2
𝑍
-1
-1
0
0
0
14
Cбаз
xбаз
4
B
Положительных оценок нет, план оптимален.
𝑥̅𝑚𝑖𝑛 = (0, 0, 8, 6, 2)
Подставим значение в функцию:
𝑓(𝑥̅𝑚𝑖𝑛 ) = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5 = 6 ∗ 0 + 4 ∗ 0 − 8 + 4 ∗ 6 − 2 = 14
Значение 𝑓(𝑥̅𝑚𝑖𝑛 ) равняется значению в строке 𝒵 в столбце B, следовательно, оптимальный план найден верно.
2.2. Нахождение max𝒇
Пользуясь найденной раннее простейшей системой, сразу перейдем к решению исходной задачи.
𝑚𝑎𝑥𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
17
𝑥2 + 0,5𝑥4 − 0,5𝑥5 = 2
{𝑥3 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥1 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Чтобы перейти к решению системы симплекс-методом, преобразуем 𝑚𝑎𝑥𝑓
в 𝑚𝑖𝑛𝑓:
𝑚𝑎𝑥𝑓 = (−1) ∗ 𝑚𝑖𝑛𝑓
𝑚𝑖𝑛𝑓 = −6𝑥1 − 4𝑥2 + 𝑥3 − 4𝑥4 + 𝑥5
𝑥2 + 0,5𝑥4 − 0,5𝑥5 = 2
{𝑥3 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥1 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Решение симплекс-методом представлено в таблице 3.
Таблица 3 – Решение исходной задачи 𝑚𝑎𝑥𝑓
x1
x2
x3
x4
x5
−6
−4
1
-4
1
x2
0
1
0
0,5
-0,5
2
1
x3
0
0
1
-1,25
0,75
2
-6
x1
1
0
0
0,25
0,25
2
𝑍
0
0
0
-0,75
0,25
-18
-4
x2
0
1
2/3
-1/3
0
10/3
1
x5
0
0
4/3
-5/3
1
8/3
-6
x1
1
0
-1/3
2/3
0
4/3
𝑍
0
0
-1/3
-1/3
0
−18
Cбаз
xбаз
-4
B
2
3
Положительных оценок нет, план оптимален.
18
𝑥̅𝑚𝑎𝑥 = (4⁄3 , 10⁄3 , 0, 0, 8⁄3)
2
2
𝑚𝑎𝑥𝑓 = (−1) ∗ 𝑚𝑖𝑛𝑓 → 𝑚𝑎𝑥𝑓 = −18 ∗ (−1) = 18
3
3
Подставим значение в функцию:
𝑓(𝑥̅𝑚𝑎𝑥 ) = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5 =
2
3
Значение 𝑓(𝑥̅𝑚𝑎𝑥 ) равняется значению в строке 𝒵 ∗ (−1) в столбце B, сле= 6 ∗ 4⁄3 + 4 ∗ 10⁄3 − 0 + 4 ∗ 0 − 8⁄3 = 18
довательно, оптимальный план найден верно.
3. НАХОЖДЕНИЕ ПЛАНА С ЦЕЛОЧИСЛЕННЫМИ ЗНАЧЕНИЯМИ МЕТОДОМ ГОМОРИ ДЛЯ max𝒇
Задачу с дополнительным условием целочисленности переменных называют задачей целочисленного программирования. Идея методов решения подобных задач, называемых методами отсечения, состоит в следующем.
На первом этапе решается ЗЛП, получающаяся из целочисленной задачи
отбрасыванием требования целочисленности переменных. Если найденное решение 𝑥1∗ целочисленно, то оно является решением исходной целочисленной задачи. Если нет, то к системе ограничений ЗЛП, решаемой на первом этапе, добавляется правильное отсечение, которое «отсекает» точку 𝑥1∗ и сохраняет в допустимом множестве все целочисленные планы исходной задачи.
На втором этапе находится решение 𝑥2∗ ЗЛП с дополнительно введенным
ограничением. Здесь удобно использовать двойственный симплекс-метод. Если
точка 𝑥2∗ не является целочисленной, то вводится новое правильное отсечение. и
т.д. до тех пор, пока решение очередной ЗЛП не будет удовлетворять требованию
целочисленности.
19
Конкретные алгоритмы различных методов отсечения определяются конкретными способами построения правильных отсечений. Наиболее известны алгоритмы Гомори и их модификации. Переходя к ним, стоит рассмотреть теорему,
связанную с введением правильного отсечения в случае работы с вещественными числами, имеющими дробную часть.
Как известно, целой частью вещественного числа 𝑎 называется наибольшее целое число, не превосходящее a. Дробной частью числа 𝑎 называется разность между этим числом и его целой частью. Целая и дробная части числа 𝑎
обозначаются соответственно [𝑎] и {𝑎}. Очевидно, что для любого вещественного числа 0 ≤ {𝑎} ≤ 1 и 𝑎 = [𝑎] + {𝑎}.
Теорема 3.1. Если число 𝑏𝑘 (k = 1 или 2) – нецелое, то неравенство
{𝑎𝑘1 }𝑥1 + {𝑎𝑘2 }𝑥2 ≥ {𝑏𝑘 } является правильным отсечением.
Пусть дана полностью целочисленная ЗЛП. Процесс ее решения методом
Гомори включает следующие этапы:
1. Используя симплекс-метод, находим решение исходной ЗЛП без учета
требования целочисленности переменных.
2. Если все элементы столбца B завершающей симплексной таблицы целые числа, то основной опорный план, построенный по этой таблице, является
оптимальным решением исходной целочисленной ЗЛП.
3. Если же в столбце B завершающей таблицы содержатся нецелые числа,
то выбираем среди них компоненту с наименьшим порядковым номером и рассматриваем соответствующую ей строку симплексной таблицы. Пусть эта строка
имеет вид:
𝑎𝑘1
𝑎𝑘2
…
𝑎𝑘𝑛
𝑏𝑘
По выбранной строке записываем правильное отсечение
{𝑎𝑘1 }𝑥1 + {𝑎𝑘2 }𝑥2 + ⋯ + {𝑎𝑘𝑛 }𝑥𝑛 ≥ {𝑏𝑘 }.
20
Вводя неотрицательную дополнительную переменную 𝑥𝑛+1 , преобразуем
неравенство в равенство. Изменяя знак у обеих частей полученного равенства
(так чтобы новая переменная 𝑥𝑛+1 входила в него с коэффициентом 1), приведем
его к виду
−{𝑎𝑘1 }𝑥1 − {𝑎𝑘2 }𝑥2 − ⋯ − {𝑎𝑘𝑛 }𝑥𝑛 + 𝑥𝑛+1 = {𝑏𝑘 }.
4. Используя двойственный симплекс-метод, находим оптимальное решение задачи, получающейся из решенной нецелочисленной задачи в результате
добавления к ее системе ограничений построенного равенства. Исходная для
применения двойственного симплекс-метода таблица получается из завершающей симплексной таблицы предыдущего этапа добавлением к ней строки, соответствующей ограничению, и столбца новой базисной переменной 𝑥𝑛+1 . Решив
полученную ЗЛП, возвращаемся к этапу 2 данного алгоритма.
3.1. Нахождение max𝒇 с целочисленными значениями
𝑚𝑎𝑥𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
3𝑥1 + 2𝑥2 − 𝑥3 + 3𝑥4 − 𝑥5 = 8
−𝑥1 + 𝑥2 + 𝑥3 − 𝑥4 = 2
{
4𝑥1 − 𝑥2 − 2𝑥3 + 3𝑥4 = 2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Составим для данной ЗЛП вспомогательную задачу:
𝑚𝑎𝑥𝑆 = 𝑥6 + 𝑥7 + 𝑥8
3𝑥1 + 2𝑥2 − 𝑥3 + 3𝑥4 − 𝑥5 + 𝑥6 = 8
−𝑥1 + 𝑥2 + 𝑥3 − 𝑥4 + 𝑥7 = 2
{
4𝑥1 − 𝑥2 − 2𝑥3 + 3𝑥4 + 𝑥8 = 2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 7
Построенная симплексная таблица представлена в таблице 4.
21
Таблица 4 – Решение вспомогательной задачи
x1
x2
x3
x4
x5
x6
x7
x8
0
0
0
0
0
1
1
1
x6
3
2
-1
3
-1
1
0
0
8
1
x7
-1
1
1
-1
0
0
1
0
2
1
x8
4
-1
-2
3
0
0
0
1
2
𝑆
6
2
-2
5
-1
0
0
0
12
1
x6
0
2,75
0,5
0,75
-1
1
0
6,5
1
x7
0
0,75
0,5
-0,25
0
0
1
2,5
0
x1
1
-0,25
-0,5
0,75
0
0
0
0,5
𝑆
0
3,5
1
0,5
-1
0
0
9
0
x2
0
1
2/11
3/11
-4/11
0
26/11
1
x7
0
0
4/11 -5/11
3/11
1
8/11
0
x1
1
0
- 5/11
9/11
-1/11
0
12/11
𝑆
0
0
4/11 -5/11
3/11
0
8/11
0
x2
0
1
0
0,5
-0,5
2
0
x3
0
0
1
-1,25
0,75
2
0
x1
1
0
0
0,25
0,25
2
𝑆
0
0
1
-1,25
0,75
2
Cбаз
xбаз
1
B
Так как 𝑆𝑚𝑖𝑛 = 0 и среди базисных переменных завершающей симплексной таблицы нет ни одной искусственной, то полученная таблица с вычеркнутыми столбцами искусственных переменных определяет простейшую систему,
равносильную системе ограничений исходной канонической задачи.
Переходим к решению исходной задачи:
22
𝑚𝑎𝑥𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
𝑥2 + 0,5𝑥4 − 0,5𝑥5 = 2
{𝑥3 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥1 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Чтобы перейти к решению системы симплекс-методом, преобразуем 𝑚𝑎𝑥𝑓
в 𝑚𝑖𝑛𝑓:
𝑚𝑎𝑥𝑓 = (−1) ∗ 𝑚𝑖𝑛𝑓
𝑚𝑖𝑛𝑓 = −6𝑥1 − 4𝑥2 + 𝑥3 − 4𝑥4 + 𝑥5
𝑥2 + 0,5𝑥4 − 0,5𝑥5 = 2
{𝑥3 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥1 − 1,25𝑥4 + 0,75𝑥5 = 2
𝑥𝑘 ≥ 0, 𝑘 = ̅̅̅̅̅
1, 5
Решение симплекс-методом представлено в таблице 5.
Таблица 5 – Решение исходной задачи, шаг 1
x1
x2
x3
x4
x5
−6
−4
1
-4
1
x2
0
1
0
0,5
-0,5
2
1
x3
0
0
1
-1,25
0,75
2
-6
x1
1
0
0
0,25
0,25
2
𝑍
0
0
0
-0,75
0,25
-18
-4
x2
0
1
2/3
-1/3
0
10/3
1
x5
0
0
4/3
-5/3
1
8/3
-6
x1
1
0
-1/3
2/3
0
4/3
𝑍
0
0
-1/3
-1/3
0
−18
Cбаз
xбаз
-4
B
2
3
Правильное отсечение:
23
{0}𝑥1 + {0}𝑥2 + {4⁄3}𝑥3 + {−5⁄3}𝑥4 + {1}𝑥5 ≥ {2⁄3}
{1⁄3}𝑥3 + {1⁄3}𝑥4 ≥ {2⁄3}
1⁄ 𝑥 + 1⁄ 𝑥 − 𝑥 = 2⁄
6
3 4
3 5
3
-1⁄3 𝑥4 - 1⁄3 𝑥5 + 𝑥6 = − 2⁄3
Подставим в симплексную таблицу столбец и строку, соответствующую
новому ограничению (таблица 6):
Таблица 6 – Решение исходной задачи, шаг 2
xбаз
x1
x2
x3
x4
x5
x6
B
x2
0
1
2/3
-1/3
0
0
10/3
x5
0
0
4/3
-5/3
1
0
8/3
x1
1
0
-1/3
2/3
0
0
4/3
x6
0
0
-1/3
-1/3
0
1
−2/3
𝑍
0
0
-1/3
−
1
3
0
0
−18
x2
0
1
0
-1
0
2
2
x5
0
0
0
-3
1
4
0
x1
1
0
0
1
0
-1
2
x3
0
0
1
1
0
-3
2
𝑍
0
0
0
0
0
-1
-18
2
3
Положительных оценок нет, план оптимален.
𝑥̅𝑚𝑎𝑥/целое = (2, 2, 2,0, 0)
𝑚𝑎𝑥𝑓целое = (−1) ∗ 𝑚𝑖𝑛𝑓целое → 𝑚𝑎𝑥𝑓целое = −18 ∗ (−1) = 18
𝑓(𝑥̅𝑚𝑎𝑥/целое ) = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5 = 6 ∗ 2 + 4 ∗ 2 − 2 + 4 ∗ 1 − 0 = 18
24
Значение 𝑓(𝑥̅𝑚𝑎𝑥/целое ) равняется значению в строке 𝒵 ∗ (−1) в столбце B,
следовательно, оптимальный план найден верно.
𝑓(𝑥̅𝑚𝑎𝑥/целое ) < 𝑓(𝑥̅𝑚𝑎𝑥 )
4. СОСТАВЛЕНИЕ ДВОЙСТВЕННОЙ ЗАДАЧИ И НАХОЖДЕНИЕ ЕЕ
ОПТИМАЛЬНОГО РЕШЕНИЯ МЕТОДОМ КАНТОРОВИЧА
Критерии, установленные Л.В. Канторовичем, позволяют определить, является ли найденный план задачи оптимальным. Для этого к ЗЛП ставят в соответствие другую ЗЛП, называемую двойственной по отношению к ней. Основные свойства взаимно двойственных задач выражаются следующим образом:
Теорема 4.1. Значение целевой функции задачи максимизации для любого
ее плана не превосходит значения целевой функции двойственной к ней задачей
минимизации для любого ее плана, т.е. для любых планов 𝑥 D, 𝑦 D1 выполняется неравенство 𝑧(𝑥) ≥ 𝑧1 (𝑦).
Теорема 4.2. Если одна из взаимно двойственных задач имеет решение, то
имеет решение и другая, причем значения целевых функций для оптимальных
планов обеих задач совпадают. Если же одна из задач неограничена, то другая
недопустима.
Теорема 4.3. Если каждая из пары взаимно двойственных задач имеет хотя
бы по одному плану, то обе задачи имеют оптимальные решения.
Теорема 4.4. Для того чтобы некоторые планы 𝑥 и 𝑦 взаимно двойственных
задач были оптимальными, необходимо и достаточно чтобы значения целевых
функций для этих планов были равны.
Стоит отметить, что при рассмотрении пары взаимно двойственных задач
могут представиться следующие три возможности:
1. Обе задачи обладают планами и в этом (и только в этом) случае имеют
оптимальные решения.
2. Одна из задач обладает планами, а другая не обладает. Тогда (и только
тогда) задача с непустым допустимым множеством неограничена.
25
3. Обе задачи планов не имеют.
Формулировка критерия Канторовича для одного плана. Для того чтобы
план 𝑥0 данной ЗЛП был оптимальным, необходимо и достаточно, чтобы существовал план 𝑦0 двойственной задачи, такой что при подстановке этих планов в
соответствующие системы ограничений всякому строгому неравенству в условиях данной ЗЛП соответствовало бы равенство в сопряженном условии двойственной задачи.
4.1. Составление двойственной задачи и нахождение оптимального решения
с помощью критерия Канторовича для min𝒇
𝑓(𝑥̅𝑚𝑖𝑛 ) = 14,
𝑥̅𝑚𝑖𝑛 = (0, 0, 8, 6, 2)
𝑚𝑎𝑥𝑓′ = 8𝑦1 + 2𝑦2 + 2𝑦3
𝑚𝑖𝑛𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
3𝑥1 + 2𝑥2 − 𝑥3 + 3𝑥4 − 𝑥5 = 8
−𝑥1 + 𝑥2 + 𝑥3 − 𝑥4 = 2
{
4𝑥1 − 𝑥2 − 2𝑥3 + 3𝑥4 = 2
=
=
=
∀𝑦1
∀𝑦2
∀𝑦3
𝑥1 ≥ 0
𝑥2 ≥ 0
𝑥3 ≥ 0
𝑥4 ≥ 0
𝑥5 ≥ 0
=
=
>
>
>
3𝑦1 − 𝑦2 + 4𝑦3 ≤ 6
2𝑦1 + 𝑦2 − 𝑦3 ≤ 4
−𝑦1 + 𝑦2 − 2𝑦3 ≤ −1
3𝑦1 − 𝑦2 +3𝑦3 ≤ 4
−𝑦1 ≤ −1
{
Смотрим, где в исходной задаче после подстановки получились знаки отличные от равно, и решаем систему из уравнений в двойственной задаче.
Находим 𝑦1, 𝑦2, 𝑦3 из полученной системы:
−𝑦1 + 𝑦2 − 2𝑦3 = −1
𝑦1 = 1
{ 3𝑦1 − 𝑦2 +3𝑦3 = 4 → {𝑦2 = 2 → 𝑦̅0 = (1, 2, 1)
−𝑦1 = −1
𝑦3 = 1
Подставляем 𝑦̅0 в функцию 𝑓′:
𝑚𝑖𝑛𝑓 ′ = 8𝑦1 + 2𝑦2 + 2𝑦3 = 8 ∗ 1 + 2 ∗ 2 + 2 ∗ 1 = 14
26
4.2. Составление двойственной задачи и нахождение оптимального решения
с помощью критерия Канторовича для max𝒇
2
𝑓(𝑥̅𝑚𝑎𝑥 ) = 18 ,
3
𝑥̅𝑚𝑎𝑥 = (4⁄3 , 10⁄3 , 0, 0, 8⁄3)
𝑚𝑖𝑛𝑓′ = 8𝑦1 + 2𝑦2 + 2𝑦3
𝑚𝑎𝑥𝑓 = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
3𝑥1 + 2𝑥2 − 𝑥3 + 3𝑥4 − 𝑥5 = 8
−𝑥1 + 𝑥2 + 𝑥3 − 𝑥4 = 2
{
4𝑥1 − 𝑥2 − 2𝑥3 + 3𝑥4 = 2
=
=
=
∀𝑦1
∀𝑦2
∀𝑦3
𝑥1 ≥ 0
𝑥2 ≥ 0
𝑥3 ≥ 0
𝑥4 ≥ 0
𝑥5 ≥ 0
>
>
=
=
>
3𝑦1 − 𝑦2 + 4𝑦3 ≥ 6
2𝑦1 + 𝑦2 − 𝑦3 ≥ 4
−𝑦1 + 𝑦2 − 2𝑦3 ≥ −1
3𝑦1 − 𝑦2 +3𝑦3 ≥ 4
−𝑦1 ≥ −1
{
Смотрим, где в исходной задаче после подстановки получились знаки отличные от равно, и решаем систему из уравнений в двойственной задаче.
Находим 𝑦1, 𝑦2, 𝑦3 из полученной системы:
𝑦1 = 1
3𝑦1 − 𝑦2 + 4𝑦3 = 6
11
{ 2𝑦1 + 𝑦2 − 𝑦3 = 4 → {𝑦2 = ⁄3 → 𝑦̅0 = (1, 11⁄3 , 5⁄3)
−𝑦1 = −1
𝑦3 = 5⁄3
Подставляем 𝑦̅0 в функцию 𝑓′:
2
𝑚𝑖𝑛𝑓 ′ = 8𝑦1 + 2𝑦2 + 2𝑦3 = 8 ∗ 1 + 2 ∗ 11⁄3 + 2 ∗ 5⁄3 = 18
3
27
5. ПРОВЕРКА НА ОПТИМАЛЬНОСТЬ НАЙДЕННОГО МЕТОДОМ ГОМОРИ ПЛАНА КРИТЕРИЕМ КАНТОРОВИЧА
𝑓(𝑥̅max/целое ) = 18,
𝑥̅𝑚𝑎𝑥 = (2, 2, 2,0, 0)
𝑚𝑖𝑛𝑓′ = 8𝑦1 + 2𝑦2 + 2𝑦3
𝑚𝑎𝑥𝑓целое = 6𝑥1 + 4𝑥2 − 𝑥3 + 4𝑥4 − 𝑥5
3𝑥1 + 2𝑥2 − 𝑥3 + 3𝑥4 − 𝑥5 = 8
−𝑥1 + 𝑥2 + 𝑥3 − 𝑥4 = 2
{
4𝑥1 − 𝑥2 − 2𝑥3 + 3𝑥4 = 2
=
=
=
∀𝑦1
∀𝑦2
∀𝑦3
3𝑦1 − 𝑦2 + 4𝑦3 ≥ 6
𝑥1 ≥ 0
>
2𝑦1 + 𝑦2 − 𝑦3 ≥ 4
𝑥2 ≥ 0
>
−𝑦1 + 𝑦2 − 2𝑦3 ≥ −1
𝑥3 ≥ 0
>
3𝑦1 − 𝑦2 +3𝑦3 ≥ 4
=
𝑥4 ≥ 0
−𝑦1 ≥ −1
{
=
𝑥5 ≥ 0
Смотрим, где в исходной задаче после подстановки получились знаки отличные от равно, и решаем систему из уравнений в двойственной задаче.
Находим 𝑦1, 𝑦2, 𝑦3 из полученной системы:
3𝑦1 − 𝑦2 + 4𝑦3 = 6
𝑦1 = 1,25
2𝑦1 + 𝑦2 − 𝑦3 = 4
𝑦2 = 2,75
−𝑦1 + 𝑦2 − 2𝑦3 = −1 →
𝑦3 = 1,25 → 𝑦̅0 = (1.25,2.75,1.25)
3𝑦1 − 𝑦2 +3𝑦3 > 4
4,75 > 4
−𝑦1 > −1
{1,25 < 1 − −
{
Проверка, подставляем 𝑦̅0 в функцию 𝑓′:
𝑚𝑖𝑛𝑓 ′ = 𝑓 ′ (1.25,2.75,1.25) = 8 ∗ 1.25 + 2 ∗ 2.75 + 2 ∗ 1.25 = 18
𝑚𝑎𝑥𝑓целое = 𝑚𝑖𝑛𝑓'
Вывод: 𝑦̅0 – оптимальное решение двойственной задачи.
28
6. БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1. Вентцель, Е. С. Исследование операций: Задачи, принципы, методология
Учеб. пособие для студентов вузов Е. С. Вентцель. – 2-е изд., стер. – М.:
Высшая школа, 2001. – 206 с.
2. Пантелеев, А. В. Методы оптимизации в примерах и задачах Учеб. пособие для втузов А. В. Пантелеев, Т. А. Летова. – М.: Высшая школа, 2002.
– 544 с.
3. Плотникова, Н. В. Исследование операций Ч. 1 Линейное программирование Учеб. пособие Юж.-Урал. гос. ун-т, Каф. Системы упр. – Челябинск: Издательство ЮУрГУ, 2000. – 41 с.
4. Малиновский Ю.Г., Андреева С.Г., Брагина А.А. Элементы математического программирования. Издательство ЮУрГУ, 2014. – 147 с.
5. Брагина А.А. Исследование операций. Материалы к лекционным занятиям – Челябинск: ЮУрГУ, 2019. – 112 с.
29