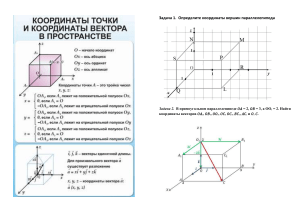
Лекция 2. Позиционные методы Позиционный метод основан на определении местоположения объекта путем засечек, представляющих собой точку пересечения двух или более линий (поверхностей) положения, относительно известных ориентиров Y С . . Б . A R2 . R1 O Д 2 R1 xА xС ( Д ) y А yС ( Д ) 2 R2 2 2 xБ xС ( Д ) y Б yС ( Д ) Координаты точек А и Б известны (радиомаяки). Измеряются дальности R1 и R2 Объект находится в точке С X или Д Типы позиционных методов • Дальномерный метод • Разностно-дальномерный метод • Суммарно-дальномерный метод • Угломерный метод • Дальномерно-угломерный метод • Псевдодальномерный метод • Радиально-скоростной метод • Разностно-радиально-скоростной метод • Псевдорадиально-скоростной метод Дальномерный метод Дальномерный метод позволяет определить пространственные координаты объекта путём измерения дальностей R1, R2, R3 до трёх точек с известными координатами: x1, y1, z1 x2 , y2 , z2 x3 , y3 , z3 x xo yo zo T - неизвестные координаты объекта, находятся из решения системы уравнений: 2 2 2 R1 x1 xo y1 yo z1 zo R2 x2 xo 2 y2 yo 2 z2 zo 2 R3 x3 xo 2 y3 yo 2 z3 zo 2 Итерационный метод решения: T R f x , x0 0 0 0 , 1 f x T f x f x T x k x k 1 R f x k 1 x x x Разностно - дальномерный метод Разностно-дальномерный метод основан на использовании разностей расстояний объекта до пар точек с известными координатами. На входе: разности дальностей, на выходе: координаты объекта. R4 R3 R4 const R3 R1 b R2 R1 const R2 Линии положения – гиперболы. Объект находится в точке пересечения линий положения * Разностно-дальномерный метод применяют когда дальности до маяков найти нельзя, но можно найти разности дальностей Угломерный метод Угломерный метод основан на использовании в качестве НП угловых направлений (пеленгов) на точки с известными координатами. На входе: пеленги, на выходе: координаты объекта. Линии положения в плоскости – лучи, в пространстве – конусы. 2 1 1 O1 , O2 - опорные точки (напр. радиомаяки) L расстояние между опорными точками xC xO1 yC yO1 2 L cos '2 sin '1 sin '1 '2 L cos '2 cos '1 sin '1 '2 Дальномерноугломерный метод Дальномерно-угломерный метод основан на использовании следующих НП: - дальности до опорной точки - углов пеленга на опорную точку Пример на плоскости: O1 - опорная точка (напр. радиомаяк) R xO , yO известные координаты опорной точки 1 1 R, - НП, полученные в результате измерений xC xO1 R sin yC yO1 R cos Радиально-скоростной метод В качестве НП используются радиальные скорости относительно опорных точек, полученные на основе измерений доплеровского смещения частоты. На выходе формируется оценка вектора скорости объекта. vR2 V 90 vR3 . 90 vR1 C Координаты опорных точек и координаты объекта считаются известными. Вектор скорости определяется в результате решения системы уравнений: T T x x x x v V, v V . C R1 O1 . O2 . O3 O1 C R2 xC xO1 T x x V v C R3 O3 xC xO3 O2 xC xO2 Разностно-радиальноскоростной метод vR R радиальная скорость относительно точки D На входе: vR1 vR2 , vR3 vR4 разности радиальных скоростей относительно опорных точек, которые эквивалентны угловым скоростям и относительно баз b и b 1 v R2 b1 vR V 1 2 v R1 1. Находят тангенциальные скорости: vò1 R 1 , vò2 R 2 , ãäå R CD xC x D vт v R1 v R2 2. Находят направляющие векторы базовых линий: rDC 2 2 xO1 xO2 xC x D , r ,r xC x D b1 xO1 xO2 b2 xO xO , 3. Находят вектор скорости объекта: V vR rDC vò1 rb1 vò2 rb2 3 4 xO3 xO4 Практическое определение координат объекта дальномерным методом На практике количество измерений дальности обычно больше трёх. Чтобы повысить точность координатных определений, для решения системы уравнений применяют метод наименьших квадратов (МНК). ПОСТАНОВКА НАВИГАЦИОННОЙ ЗАДАЧИ Дано: 1. Вектор измерений дальностей (N измерений): R R1 T R2 RN , *- измерение 2. Координаты N опорных точек (радиомаяков, навигационных спутников), записанные в векторном виде: T T x1 x1 y1 z1 , x 2 x2 y2 z2 , x N xN y N z N Найти: вектор координат объекта x xo yo zo T T Решение навигационной задачи 1. Запишем функциональную связь между измеряемой дальностью и координатами объекта 2 2 2 Ri xi xo yi yo zi zo xi x , где * - квадратичная норма, отсюда x1 x R f x x2 x xN x 2. Применим МНК, который минимизирует квадратичную норму вектора невязок: R f x min Вектор невязок Решение навигационной задачи 3. Для применения МНК найдем производную функции f(x), связывающей вектор измерений с вектором состояния, по вектору состояния x. Эта производная называется градиентной матрицей: Ri xo xi xo xi xo , отсюда 2 2 2 xi x x x y y z z i o i i o x1 x x1 x o T x2 x f x H x x2 x x T xN x xN x градиентная матрица размером N 3 T Решение навигационной задачи 4. Находим вектор состояния x, пользуясь итеративным алгоритмом, суть которого и есть МНК: T x 0 0 0 0 - начальное приближение, T x k x k 1 H x k 1 H x k 1 1 H x T k 1 k - номер итерации Критерий останова: x k x k 1 - требуемая точность R f x k 1 Сходимость МНК Геометрический фактор Не при любой геометрии взаимного расположения радиомаяков и объекта решение навигационной задачи возможно R1 R2 R3 R3 R2 R1 Геометрический фактор Не определение: пространственный геометрический фактор (PDOP) – это коэффициент ухудшения точности определения пространственных координат по сравнению с точностью измерений дальности. PDOP – “Positioning Dilution of Precision” X PDOP R Геометрический фактор можно найти по градиентной матрице H из алгоритма МНК: 1 PDOP trace H H T (trace * след матрицы)