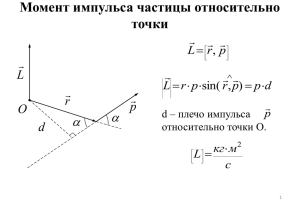
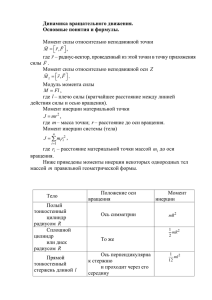
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО РЫБОЛОВСТВУ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ "МУРМАНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ" Кафедра технической механики и инженерной графики ТЕОРЕТИЧЕСКАЯ МЕХАНИКА Краткий конспект лекций для студентов – заочников. Мурманск 2013 Т. В. Каиров. Краткий конспект лекций по теоретической механике. Данный конспект предназначен для студентов заочной формы обучения инженерных специальностей и направлений. Содержит основные теоретические сведения, необходимые для самостоятельного решения контрольных работ и подготовке к зачету (экзамену). 2 Содержание I. Кинематика. ...................................................................................................... 4 §1. Кинематика точки. ..................................................................................... 4 §2. Поступательное движение твердого тела................................................ 8 §3. Вращение твердого тела вокруг неподвижной оси. ............................... 8 §4. Плоскопараллельное движение твердого тела. .................................... 10 §5. Сложное движение точки........................................................................ 15 II. Статика........................................................................................................... 16 §6. Основные понятия и аксиомы статики. ................................................. 16 §7. Момент силы. Пара сил. .......................................................................... 17 §8. Теорема о параллельном переносе силы. Приведение произвольной системы сил к данному центру. .............................................................. 19 §9. Условия равновесия систем сил. ............................................................ 20 §10. Реакции связей. Распределенные силы. .............................................. 21 §11. Трение скольжения. Трение качения. .................................................. 24 III. Динамика. ..................................................................................................... 25 §12. Законы Ньютона. Дифференциальные уравнения движения материальной точки. ................................................................................ 25 §13. Механическая система. Центр масс. Дифференциальные уравнения движения центра масс. ............................................................................. 26 §14. Количество движения. Импульс силы. Теорема об изменении количества движения. .............................................................................. 28 §15. Момент инерции. ................................................................................... 29 §16. Теорема об изменении кинетического момента. ................................ 30 §17. Работа. Мощность. ................................................................................. 32 §18. Потенциальное силовое поле. Потенциальная энергия. .................... 33 §19. Теорема об изменении кинетической энергии. Закон сохранения энергии. ..................................................................................................... 35 §20. Принцип Даламбера. Уравнения кинетостатики................................ 36 §21. Связи. Принцип возможных перемещений. Общее уравнение динамики. .................................................................................................. 38 §22. Обобщенные координаты. Уравнение Лагранжа второго рода. ....... 40 Литература ......................................................................................................... 43 3 I. Кинематика. Кинематика – раздел механики изучающий механическое движение без учета причин, вызвавших это движение. Механическое движение – изменение взаимного положения материальных тел в пространстве с течением времени. §1. Кинематика точки. Система отсчета – это тело отсчета, связанная с ним система координат и прибор для отсчета времени. Траектория – непрерывная линия, которую описывает точка при своём движении. Задачи кинематики: найти способы задания движения и, исходя из них, найти методы определения кинематических величин, характеризующих данное движение (скорость, ускорение). Задать движение точки, значит указать способ, позволяющий в любой момент времени определить её положение по отношению к выбранной системе отсчета. Способы задания движения точки. 1. Векторный способ. Положение точки в пространстве будет вполне определено, если ее радиус-вектор, проводимый из какого-либо заданного центра (рис. 1.1), известен как функция времени, т.е. r r r = r (t ) . (1.1) Равенство (1.1) определяет закон движения точки в векторной форме. 2. Координатный способ. Положение точки по отношению к какой-либо системе координат полностью определяется координатами точки. При рассмотрении движения в прямоугольной декартовой системе координат необходимо задать координаты x, y, z Z М r k O j z i X Y x y Рис. 1.1 (рис. 1.1) как функции времени: x = x(t ), y = y(t ), z = z (t ) . (1.2) 4 Данные уравнения представляют сбой уравнения движения точки в прямоугольных декартовых координатах. Очевидно, что векторный и координатный способы задания движения точки связаны соотношением: r r r r r = x⋅i + y⋅ j + z⋅k 3. Естественный способ. Естественным (или траекторным) способом задания движения удобно пользоваться в A тех случаях, когда траектория движущейся s B точки известна заранее. Пусть кривая АВ явM ляется траекторией точки М при ее движении относительно некоторой системы отсчета. Рис. 1.2 Выберем на этой траектории какую-нибудь неподвижную точку О, которую примем за начало отсчета, и установим на траектории положительное и отрицательное направления отсчета. Тогда положение точки М на траектории будет однозначно определяться криволинейной координатой s , которая равна расстоянию от точки О до точки М измеренному вдоль дуги траектории и взятому с соответствующим знаком (рис. 1.2). Чтобы знать положение точки в любой момент времени, надо знать зависимость: s = s(t ) . (1.3) – O+ Эта зависимость называется законом движения точки вдоль траектории. Кривая построена на плоскости (t , s ) , выражающая зависимость (1.3), называется графиком движения. Следует заметить, что величина s определяет положение точки на траектории, а не пройденный путь. Скорость и ускорение точки. Основными кинематическими характеристиками точки являются скорость и ускорение. Рассмотрим, как найти скорость и ускорение исходя из способа задания движения точки. 1. Скорость и ускорение точки при векторном способе задания движения точки. Вектор скорости равен первой производной от радиус-вектора по времени: 5 r r dr r& v= =r. (1.4) dt Для краткости производную по времени Z v1 M1 обозначают точкой. Направлен вектор скорости по касательной к траектории в данной точке в сторону r1 M2 r2 движения (рис. 1.3). v2 Единицы измерения скорости [ м / с ]. Y O Вектор ускорения равен первой произX водной от вектора скорости или второй проРис. 1.3 изводной от радиус-вектора по времени: r r r d v d 2 r r& &&r (1.5) a= = =v=r. dt dt 2 Двумя точками обозначают вторую производную по времени. Ускорение показывает, как быстро изменяется вектор скорости по модулю и направлению. Единицы измерения ускорения [ м / с2 ]. Если скорость остается постоянной, то движение называется равномерным, если ускорение остается постоянным, то движение называется равнопеременным. 2. Скорость и ускорение при координатном способе задания движения. Если движение задано в виде (1.2), то сперва находят проекции вектора скорости и ускорения на оси координат, затем их модули и направление по формулам приведенным ниже: проекции вектора скорости на оси координат: dx dy dz vx = = x& , v y = = y& , v z = = z& , (1.6) dt dt dt модуль вектора скорости: v = v x2 + v 2y + v z2 , (1.7) направление вектора скорости: r v r v r v cos( x, v) = x , cos( y, v) = y , cos( z , v) = z , v v v проекции вектора ускорения на оси координат: ax = v& x = && x, a y = v& y = && y, az = v& z = && z, 6 (1.8) (1.9) модуль вектора ускорения: a = ax2 + a y2 + a z2 , (1.10) направление вектора ускорения : r a r a r a (1.11) cos( x, a ) = x , cos( y, a ) = y , cos( z , a ) = z . a a a 3. Скорость и ускорение при естественном способе задания движения. Введем подвижные оси M τ n b , имеющие начало в точке М и движущиеся вместе с ней. Эти оси, называются осями естественного трехгранника (или скоростными осями). Направлены оси следующим образом – O+ n (рис.1.4): ось Mτ – по касательной к траектории в сторону положительного отсчеan a s та расстояния и называется касательной M осью; ось Мn – по нормали в сторону воb v τ гнутости траектории и лежит в соприкаaτ сающейся плоскости (соприкасающаяся Рис. 1.4 это плоскость в которой происходит бесконечно малый поворот касательной к траектории при элементарном перемещении точки) и называется нормалью; ось Mb – перпендикулярно к первым двум так, чтобы она образовала с ними правую систему осей и называется бинормалью. Т.к. скорость направлена по касательной, то vn = 0, vb = 0 , и скорость определяется только проекцией на ось Mτ ds vτ = = s& . (1.12) dt Очевидно, что vτ = v , если движение происходит в сторону положительного отсчета, и vτ = − v если движение происходит в противоположную сторону. Поэтому часто индекс τ опускают, а под v понимают численное значение скорости. Вектор ускорения лежит в соприкасающейся плоскости ( M τ n b ), поэтому ab = 0 , а проекции на оси Mτ и Mn соответственно равны: v2 aτ = v& τ = && s , an = , ρ где ρ – радиус кривизны траектории в данной точке. 7 (1.13) aτ – называется касательным (тангенциальным) ускорением и харак- теризует изменение скорости по модулю. Направлен вектор aτ по касательной к траектории в данной точке, в ту же сторону, что и скорость, если движение ускоренное, и в противоположную – если движение замедленное. an – называется нормальным ускорением и характеризует изменение скорости по направлению. Направлен вектор an всегда в положительную сторону оси Mn (к центру кривизны траектории в данной точке). Модуль и направление вектора полного ускорения (рис. 1.4): a a = aτ2 + an2 , tg α = τ . an (1.14) §2. Поступательное движение твердого тела. Под твердым телом в теоретической механике понимается абсолютно твердое тело – это тело, у которого расстояние между любыми двумя точками всё время остается неизменным. Поступательным называется такое движение твердого тела, при котором B1 любая прямая, проведенная в теле, остаB ется во все время движения параллельной своему первоначальному положению (рис. 2.1). При поступательном движении все A A1 точки тела описывают одинаковые траектории и имеют в каждый момент времени Рис. 2.1 одинаковые по модулю и направлению скорости и ускорения. Т.о. поступательное движение твердого тела вполне определяется движением какой-нибудь одной его точки и, следовательно, сводится к кинематике точки. §3. Вращение твердого тела вокруг неподвижной оси. Вращательным движением твердого тела вокруг неподвижной оси называется такое его движение, при котором какие-нибудь две точки, принадлежащие телу (или неизменно с ним связанные), остаются во всё время движения неподвижными. Проходящая через эти точки прямая называется осью вращения. 8 Для определения положения вращающегося тела проведем через ось вращения, две плоскости, одна из которых Z неподвижна, а вторая жестко связана с телом и движется вместе с ним. Тогда положение φ тела в любой момент времени однозначно ω определяется углом φ , между этими плоско- v C h M стями, который называется углом поворота тела (рис. 3.1). Чтобы знать положение тела в любой момент времени, необходимо знать зависимость угла от времени: (3.1) φ = φ(t ) . Данное уравнение выражает закон вращательного движения твердого тела вокруг ω неподвижной оси. Измеряется угол поворота в радианах Рис. 3.1 [рад]. Основными кинематическими характеристиками вращательного движения твердого тела являются его угловая скорость и угловое ускорение. Угловая скорость тела показывает, как быстро изменяется угол поворота с течение времени и равна первой производной от угла поворота по времени: dφ ω= = φ& . (3.2) dt Измеряется угловая скорость в [ рад/с ] , с -1 . Угловое ускорение показывает, как быстро изменяется угловая скорость с течением времени и равно первой производной от угловой скорости или второй производной от угла поворота по времени: dω && . ε= = ω& = φ (3.3) dt Измеряется угловое ускорение в рад/с 2 , с -2 . Угловую скорость и угловое ускорение можно изобразить в виде векторов. Вектор угловой скорости направлен вдоль оси вращения в ту сторону, откуда вращение видно происходящим против хода часовой стрелки (рис. 3.1). Вектор углового ускорения направлен вдоль оси вращения в ту 9 же сторону что и ω если вращение ускорение и в противоположную – если вращение замедленное. Скорость и ускорение произвольной точки при вращательном движении твердого тела. При вращении твердого тела вокруг неподвижной оси все точки, не принадлежащие оси, движутся по окружностям, с центрами на оси вращения, плоскости которых перпендикулярны оси вращения (рис. 3.1). Линейная скорость точки М на расстоянии h от оси вращения равна: v = hω . (3.4) Тангенциальное и нормальное ускорения точки М на расстоянии h от оси вращения равны: aτ = h ε, an = h ω 2 . h a ω aτ an M Рис. 3.2 aτ – направлен по касательной к v C (3.5) траектории (в сторону движения при ускоренном вращении тела и в обратную сторону при замедленном); an – всегда направлен по радиусу к оси вращения (рис. 3.2). Модуль и направление полного ускорения равны: a = aτ2 + an2 = h ε 2 + ω 4 , tg α = aτ ε = 2. an ω (3.6) §4. Плоскопараллельное движение твердого тела. Движение твердого тела называется плоскопараллельным или плоским, если все точки тела перемещаются в плоскостях, параллельных некоторой фиксированной плоскости. Примером плоского движения тела может служить прямолинейное качение Z цилиндра по горизонтальной плоскости. B Рассмотрим произвольное плоское движение твердого тела (рис.4.1). Пусть A все точки тела перемещаются в плоскоY стях, параллельных плоскости XY. Из О определения плоского движения следует, что любая прямая АВ, проведенная в теX ле перпендикулярно плоскости XY, будет Рис. 4.1 10 перемещаться поступательно, т.е. траектории, скорости и ускорения всех точек этой прямой будут одинаковы. Таким образом, для определения движения тела необходимо знать движение лишь одной точки на каждой прямой, проведенной перпендикулярно плоскости XY. Взяв точки в одной плоскости, параллельной плоскости XY, можно утверждать, что плоское движение твердого тела вполне определяется движением плоской фигуры, полученной от пересечения тела любой плоскостью параллельной плоскости XY. Положение плоской фигуры в плосY кости ОXY определяется положением каB кого-нибудь проведенного на этой фигуре отрезка АВ (рис. 4.2). В свою очередь φ положение отрезка АВ можно опредеA yA лить, зная координаты x A , y A точки А и О X угол φ , который отрезок АВ образует с xA осью х. Точку А, выбранную для определения положения фигуры называют поРис. 4.2 люсом. Чтобы знать положение фигуры в плоскости в любой момент времени, необходимо знать зависимости xA = xA (t ), y A = y A (t ), φ = φ(t ) (4.1) Равенства (4.1) называются уравнениями движения плоской фигуры или уравнениями плоского движения твердого тела. Первые два из уравнений (4.1) (при φ = const ) определяют поступательное движение, при котором все точки фигуры движутся так же, как полюс А. Третье уравнение (при x A = const, y A = const ) определяет вращательное движение фигуры вокруг оси, проходящей через полюс А перпендикулярно плоскости OXY (далее для краткости будем говорить - вокруг полюса). Т.е движение плоской фигуры может рассматриваться как слагающееся из поступательного движения, при котором все точки фигуры движутся так же, как полюс А, и из вращательного движения вокруг этого полюса. Основными кинематическими характеристиками рассматриваемого движения являются скорость и ускорение поступательного движения, равные скорости и ускорению полюса, а также угловая скорость и угловое 11 ускорение вращательного движения вокруг полюса, которые от выбора полюса не зависят. Скорость и ускорение произвольной точки при плоском движении. Скорость любой точки М плоской фигуры геометрически складывается из скорости полюса, и скорости, которую точка М получает при вращении фигуры вокруг этого полюса. r r r vM = v A + vMA . (4.2) r Поскольку скорость vMA точка М полуvМA чает при вращении вокруг полюса А, то её vМ можно найти по формуле: ω β v MA = ω ⋅ AM , α α А М где ω – угловая скорость тела. vA vA r Вектор скорости vMA всегда направлен Рис. 4.3 перпендикулярно АМ в сторону вращения тела (рис. 4.3). Теорема о проекциях скоростей двух точек: проекции скоростей двух точек плоского фигуры на ось, проходящую через эти точки, равны друг другу. Рассмотрим какие-нибудь две точки А и М плоской фигуры (рис. 4.3), проектируя обе части равенства (4.2) на ось, направленную по АМ, получим: v A ⋅ cosα = v М ⋅ cosβ . (4.3) Мгновенный центр скоростей (МЦС). Мгновенным центром скоростей называется точка плоской фигуры, скорость которой в данный момент времени равна нулю. Пусть в данный момент времени точки А и r r В плоской фигуры имеют скорости v A и v B , не vA A B P ω Рис. 4.4 vB параллельные друг другу (рис.4.4). Тогда точка Р, лежащая на пересечении перпендикуляров к r r векторам v A и v B , проведенных из точек А и В будет мгновенным центром скоростей. Если теперь в качестве полюса взять точку Р, то по формуле (4.2) скорость точки А будет равна: 12 r r r r v A = v P + vPA = vPA . (4.4) Аналогичный результат получается для любой другой точки фигуры. Следовательно, скорости точек плоской фигуры определяются в данный момент времени так, как если бы движение фигуры было вращением вокруг мгновенного центра скоростей. При этом для любой точки можно записать: v A = ω ⋅ PA, vB = ω ⋅ PB , или vA v = B . (4.5) PA PB Зная положение МЦС можно определить направление скорости любой точки тела в данный момент времени. Скорость произвольной точки плоской фигуры в данный момент времени направлена перпендикулярно прямой, соединяющей данную с МЦС, в соответствии с направлением вращения. Некоторые частные случаи определения мгновен5ного центра скоростей: 1) При качении без скольжения цилинω B vB дрического тела по поверхности другого (рис. vA 4.5), МЦС совпадает с точкой соприкосновения тел. vC C A Т.к. движение всего тела, в данный момент времени, можно представить как вращательное вокруг МЦС, то скорости точек тела будут направлены так, как если бы они двиP Рис. 4.5 гались по окружностям, с центром в точке Р, т.е перпендикулярно соответствующим радиусам (прямым, соединяющим данную точку и МЦС). Например (рис. 4.5) скорость точки А направлена перпендикулярно АР, а скорость точки В - ВР. 2) Если скорости точек А и В плоской фигуры паv A раллельны друг другу, причем линия АВ, соединяющая A их, не перпендикулярна к направлению скоростей этих vB В точек (рис. 4.6), то мгновенный центр скоростей лежит в бесконечности. Скорости всех точек фигуры в данРис. 4.6 ный момент времени равны друг другу по модулю, и ω= 13 направлению. Такое движение называют мгновенно поступательным. Угловая скорость тела в этот момент времени равна нулю. 3) Если скорости точек А и В плоской фигуры паvA A раллельны друг другу и при этом линия АВ, соединяюvB щая их, перпендикулярна к направлению скоростей этих B точек (рис. 4.7), то для нахождения МЦС надо, кроме r r направлений, знать еще и модули скоростей v и v A B . На P ω Рис. 4.7 пресечении АВ и прямой, соединяющей концы векторов r r v A и v B , получим МЦС. 4) Если известны вектор скорости какой-нибудь точки А фигуры и ее r угловая скорость ω , то МЦС лежит на перпендикуляре к v A на расстоянии vA от точки А, что следует из (4.5). ω Ускорение любой точки М плоской фигуры геометрически складывается из ускорения какой-нибудь другой точки А, принятой за полюс, и ускорения, которое точка М получает при вращении фигуры вокруг этого полюса. r r r aM = a A + aMA . (4.6) r Представим ускорение aMA в виде суммы нормальной и касательной PA = составляющей, тогда (4.6) примет вид r r rτ rn . aM = a A + aMA + aMA a MA ε A ω a MA При направлен перпендикулярно АМ в соответствии с направлением углового ускорения ε ; rn вектор aMA всегда направлен aM anMA aA этом (4.7) rτ вектор aMA M aA Рис. 4.8 от точки М к полюсу А (рис. 4.8). Численные их значения, можно найти по формулам (3.5): τ n aMA = AM ⋅ ε, aMA = AM ⋅ ω 2 . Ускорения точек А и М также можно представить в виде суммы касательной и нормальной составляющих, если они двигаются по известным криволинейным траекториям. 14 §5. Сложное движение точки. Движение точки по отношению сразу к двум системам отсчета, одна из которых неподвижна, а вторая движется определенным образом относительно первой, называется составным или сложным. Движение, совершаемое точкой отZ1 v от носительно подвижной системы отсчета v аб Z O1 X 1Y1 Z1 , называется относительным M O X O1 v пер Y 1 Y X1 движением. Скорость и ускорение точки при этом движении называются относиr r тельными и обозначаются vот , aот . Движение подвижной системы отсчета относительно O1 X 1Y1 Z1 неподвиж- ной OXYZ будет для точки переносным движением. Переносная скорость (ускорение), это скорость (ускорение) той точки подвижной системы отсчета, с которой в данный момент времени совпадает движущаяся точка М (рис. r r 5.1). Обозначаются vпер , aпер . Рис. 5.1 Движение точки относительно неподвижной системы отсчета OXYZ называется абсолютным движением. Скорость и ускорение точки при r r этом движении называются абсолютными и обозначаются vаб , aаб . Теорема о сложении скоростей. Абсолютная скорость точки при сложном движении геометрически складывается из относительной и переносной скоростей: r r r (5.1) vаб = vот + vпер . Модуль абсолютной скорости можно найти по теореме косинусов: 2 2 vаб = vот + vпер + 2 vот vпер cos α , r r где α - угол между векторами vот и vпер (рис. 5.1). (5.2) Теорема Кориолиса о сложении ускорений. Абсолютное ускорение точки при сложном движении геометрически складывается из относительного, переносного и кориолисова ускорений: r r r r (5.3) aаб = aот + aпер + aкор . Относительные скорость и ускорение находят, считая подвижную систему отсчета неподвижной. Переносные скорость и ускорение находят, полагая, что точка неподвижна относительно подвижной системы отсчета. 15 Кориолисово ускорение находится по формуле: r r r aкор = 2 (ω пер × vот ) , (5.4) где ω пер – угловая скорость подвижной системы отсчета. Модуль кориолисова ускорения равен: aкор = 2ω пер vот sin β , r r здесь β – угол между векторами ω пер и vот (рис. 5.2). a кор v от β ωпер Рис. 5.2 (5.5) Направлен вектор кориолисова ускорения перпендикулярно плоскости образованной r r векторами ω пер и vот , в ту сторону, откуда r r кратчайший поворот вектора ω пер к vот виден происходящим против хода часовой стрелки (рис. 5.2). II. Статика. Статика – это раздел механики изучающий условия равновесия механических систем под действием сил. §6. Основные понятия и аксиомы статики. Сила – основная мера механического взаимодействия материальных тел. Сила характеризуется модулем, направлением и F точкой приложения (рис. 6.1). Измеряется в ньютонах [Н]. Прямая, вдоль которой направлена сила, называется линией действия силы. Системой сил называется совокупность сил Рис. 6.1 действующих на рассматриваемое тело или тела. Если линии действия всех сил пересекаются в одной точке, то система сил называется сходящейся. Если линии действия всех сил лежат в одной плоскости, то система сил называется плоской, а если не лежат, то – пространственной. Если одну систему сил, действующую на твердое тело, можно заменить другой, не изменяя при этом состояния покоя или движения тела, то такие две системы сил называются эквивалентными. Если данная система сил эквивалентна одной силе, то эта сила называется равнодействующей данной системы сил. 16 Если под действием данной системы сил тело находится в равновесии, то эта система сил называется уравновешенной или эквивалентной нулю. Аксиома 1. Твердое тело, под действием двух сил, может находиться в равновесии тогда, и только тогда, когда эти силы равны по модулю, и направлены вдоль одной прямой в противоположные стороны. Аксиома 2. Состояние покоя или движения тела не изменится, если к действующей на него системе сил прибавить или отнять уравновешенную систему сил. Следствие. Силу можно перенести вдоль линии действия силы из данной точки в любую другую. Аксиома 3. Две силы, приложенные к телу в одной точке, имеют равнодействующую, которая равна их геометричеF1 R ской сумме и приложена в той же точке (рис. 6.2). r r r R = F1 + F2 . F2 Рис. 6.2 Модуль равнодействующей может быть найден по теореме косинусов: R = F12 + F22 + 2 F1 F2 cosα . Аксиома 4. (Закон равенства действия и противодействия). При действии одного тела на другое силы их взаимодействия равны по модулю и направлены вдоль одной прямой в противоположные стороны. Аксиома 5. (Принцип отвердевания). Равновесие деформируемого тела не изменится, если его считать абсолютно твердым (отвердевшим). §7. Момент силы. Пара сил. Моментом силы относительно неподвижного центра называется векторная величина, равная векторному произведению радиус-вектора, проведенного из центра момента в точку приложения силы, на вектор силы: r r r r M O ( F ) = r × F . (7.1) MO F h Направлен вектор момента силы (рис. 7.1) перпендикулярно плоскости, r образованной векторами r и r F , в ту сторону, откуда сила видна стремящаяся повер- F A r О Рис. 7.1 17 нуть тело, вокруг выбранного центра, против хода часовой стрелки. Момент силы измеряется в ньютонах, умноженных на метр [ Н ⋅ м ]. Модуль момента силы равен произведению силы на плечо: r (7.2) M O (F ) = F ⋅ h . Плечом силы называется кратчайшее расстояние от центра момента до линии действия силы (рис. 7.2). Момент силы характеризует вращательное действие силы. Моментом силы относительно оси называется проекция вектора момента силы на эту ось. Момент силы относительно каждой из координатных осей может быть найден по формулам: r M x ( F ) = ± Fyz ⋅ hx , r (7.3) M y ( F ) = ± Fzx ⋅ hy , r M z ( F ) = ± Fxy ⋅ hz . где Fyz , Fzx , Fxy – проекции силы на плоскости YZ, ZX, XY соответственно, hx ( hy , hz ) – кратчайшее расстояние от оси X (Y, Z) до линии действия силы Fyz ( Fzx , Fxy ) (рис. 7.2). Знак «+» берется, если сила ( Fyz , Fzx , Fxy ) стремит- Z ся повернуть тело вокруг оси против хода часовой стрелки, если смотреть с положительного конца оси и знак «-» в противном случае. На рис. 7.2. момент си- F hz F xy XY Рис. 7.2 лы относительно оси Z – положителен. Момент силы относительно некоторого центра равен нулю, если линия действия силы проходит через центр момента. Момент силы относительно некоторой оси равен нулю, если линия действия силы параллельна данной оси или пересекает её. Парой сил называется система из двух сил, равных по модулю и направленных в противоположные стороны вдоль параллельных прямых (рис. 7.3). 18 F2 A d B F1 Кратчайшее расстояние d между линиями действия сил пары называется плечом пары. Пара сил оказывает на тело только вращательное действие и основной её характеристикой является момент пары. Моментом пары называется вектор, определяемый равенством: uuur r uuur r r r r M ( F1 , F2 ) = AB × F2 = BA × F1 . (7.4) Рис. 7.3 Направлен вектор момента пары перпендикулярно плоскости действия пары, в ту сторону, откуда пара видна стремящаяся повернуть тело против хода часовой стрелки. Вектор момента пары - свободный, т.е. его можно считать приложенным к любой точке тела. Модуль момента пары равен произведению модуля одной из сил на плечо пары: M = F1 ⋅ d = F2 ⋅ d . (7.5) r r r Теорема Вариньона: Если система сил F1 , F2 ,K , Fn имеет равнодейr ствующую R , то момент этой равнодействующей, относительно произвольно выбранного центра, равен геометрической сумме моментов всех сил системы, относительно того же центра. n r r r r M O ( R ) = ∑ M O ( Fk ) . (7.6) k =1 §8. Теорема о параллельном переносе силы. Приведение произвольной системы сил к данному центру. Теорема о параллельном переносе силы: Силу, приложенную к твердому телу, не изменяя состояния покоя или движения тела, можно перенести из данной точки в любую другую, параллельно самой себе, прибавляя при этом пару сил с моментом, равным моменту переносимой силы относительно точки, куда эта сила переносится. F1 Доказательство: Пусть на тело действует сила F r F в точке А. Добавив в точке В уравновешенную сиr r r r B ′ ′ F , F , такую что F = F = F , и F стему сил 1 1 1 1 1 F, A r r можно считать, что на тело действует сила F1 = F , F1 r r приложенная в точке В и пара сил F , F1′ , момент Рис. 8.1 ( 19 ) r которой равен моменту силы F , относительно точки В (рис.8.1), согласно формулам (7.4) и (7.1), имеем: uuur r r r r r r M F , F1′ = BA × F = M B F , ( ) ( ) т.о. теорема доказана. Главным вектором системы сил называется геометрическая сумма всех сил, входящих в систему. r n r R = ∑ Fk . (8.1) k =1 Главным моментом системы сил относительно некоторого центра называется геометрическая сумма моментов всех сил системы относительно того же центра. n r r r M O = ∑ M O Fk . (8.2) ( ) k =1 При помощи теоремы о параллельном переносе силы можно произвольную систему сил привести к данному центру. Теорема Пуансо: Любая система сил при приведении к произвольному центру заменяется одной силой, равной главному вектору (8.1) и приложенной в центре приведения, и одной парой сил с моментом равным главному моменту сил (8.2) относительно центра приведения. §9. Условия равновесия систем сил. Для равновесия произвольной пространственной системы сил необходимо и достаточно чтобы главный вектор системы сил и главный момент системы сил относительно произвольно выбранного центра были равны нулю: r r R = 0, M O = 0 . (9.1) Данные равенства выражают условия равновесия произвольной пространственной системы сил в векторной форме. Спроецировав (9.1) на оси координат получим условия равновесия произвольной пространственной системы сил в координатной форме: n n ∑F kx k =1 = 0, ∑ Fky = 0, ∑ Fkz = 0, k =1 n x k =1 n r r r Fk = 0, ∑ M y Fk = 0, ∑ M z Fk = 0. ∑M ( ) k =1 n n k =1 ( ) 20 k =1 ( ) (9.2) Т.е. для равновесия произвольной пространственной системы сил необходимо и достаточно чтобы суммы проекций всех сил на оси координат и суммы моментов всех сил относительно координатных осей были равны нулю. Для равновесия сходящейся системы сил необходимо и достаточно чтобы суммы проекций всех сил на оси координат были равны нулю: n ∑F kx k =1 n n k =1 k =1 = 0, ∑ Fky = 0, ∑ Fkz = 0. (9.3) Для равновесия плоской системы сил необходимо и достаточно, чтобы суммы проекций всех сил на каждую из координатных осей и сумма моментов всех сил, относительно любого центра, лежащего в плоскости действия сил, были равны нулю: n n n r F = 0, F = 0, M ( F (9.4) ∑ kx ∑ ky ∑ O k) = 0, k =1 k =1 k =1 r здесь M O ( F ) так называемый алгебраический момент, который равен мо- дулю момента силы, взятого с соответствующим знаком: r M O (F ) = ± F ⋅ h . F3 (9.5) Знак плюс берется, если сила стремится поF 1 вернуть тело, вокруг выбранного центра, против хода часовой стрелки, и знак минус в противном случае. r h1 Например (рис. 9.1): момент силы F1 будет со r r О h2 0 F знаком минус , момент силы M ( F ) = − F ⋅ h F 2 O 1 1 1 3 r r h3 со знаком плюс M O ( F3 ) = F3 ⋅ h3 , а момент силы F2 r Рис. 9.1 будет равен нулю M O ( F2 ) = 0 , т.к. плечо силы, от- носительно центра О, равно нулю. §10. Реакции связей. Распределенные силы. Всё, что ограничивает перемещения тела в пространстве называют связью. Силой реакции связи (или реакцией связи, или реакцией опоры) называют силу, с которой связь действует на тело. Направлена сила реакции в сторону, противоположную той, куда связь не дает перемещаться телу. 21 NА RА YА RА NB A T A XА A B Рис. 10.1 Рис. 10.2 Рис. 10.4 Рис. 10.3 RА Y RА YА A MА XА A B X Рис. 10.6 Рис. 10.5 1. Гладкая поверхность (гладкая опора). Реакция гладкой поверхности направлена по общей нормали к соприкасающимся поверхностям в точке соприкосновения (рис. 10.1). 2. Нить. Реакция нити направлена вдоль нити к точке подвеса (рис. 10.2). 3. Цилиндрическая шарнирная неподвижная опора (неподвижный шарнир). Направление реакции может быть любым в плоскости, перпендикулярной оси шарнира (рис.10.3). Ось шарнира проходит через центр шарнира (точка А), перпендикулярно плоскости рисунка. При решении задач, как правило, эту реакцию раскладывают на две взаимно перпендикулярные r r составляющие X A и YA . 4. Цилиндрическая шарнирная подвижная опора (подвижный шарнир). Реакция направлена перпендикулярно поверхности, на которую шарнир опирается (рис. 10.4). 5. Стержень. Реакция прямолинейного стержня АВ (рис. 10.5) направлена вдоль его оси. 6. Жесткая заделка. В случае, когда все силы, действующие на тело r лежат в одной плоскости, в жесткой заделке возникнет сила реакции RA в 22 этой плоскости (рис. 10.6), которую раскладывают на две взаимно перпенr r дикулярные составляющие X A и YA , и пара сил, с заранее неизвестным моментом M A . Распределенные силы. Силы, действующие на тело, могут быть сосредоточенными или распределенными. Сосредоточенная сила действует на тело в одной его точке. Распределенная сила действует на все точки данного объема или данной поверхности тела. В случае плоской системы сил, сила может быть распределена вдоль отрезка прямой с интенсивностью q , которая показывает какая сила действует на единицу длины. q max q l l Q Q l/2 l/3 l l Рис. 10.7 Рис. 10.8 1. Сила, распределенная равномерно вдоль участка длины l (рис. 10.7), с интенсивностью q , заменяется сосредоточенной силой, приложен- ной посередине участка, на котором сила распределена, и по модулю равной: Q = q ⋅l . (10.1) 2. Сила, распределенная по линейному закону вдоль участка длины l (рис. 10.8), с интенсивностью, изменяющейся от нуля до некоторого максимального значения qmax , заменяется сосредоточенной силой, приложенной на расстоянии l / 3 от точки, где интенсивность максимальна, и по модулю равной: 1 Q = qmax ⋅ l . (10.2) 2 23 §11. Трение скольжения. Трение качения. При попытке сдвинуть одно тело по поверхности другого в плоскости соприкосновения возникает сила трения скольжения, которая может изменяться от нуля до некоторого предельного (максимального) значения. Модуль предельного значения силы трения равен: Fтрmax = f N , (11.1) где f - статический коэффициент трения скольжения (безразмерная величина, определяемая опытным путем), N - нормальная реакция опоры (рис. 11.1). Состояние, при котором сила трения N достигает предельного значения, называется F предельным состоянием равновесия. При F тр дальнейшем увеличении сдвигающей силы тело придет в движение. При движении тела mg сила трения так же определяется формулой Рис. 11.1 (11.1), однако, коэффициент трения (в это случае называемый динамическим) несколько меньше статического. Трением качения называется сопротивление, возникающее при качении одного тела по поверхности другого. Сопротивление качению можно учесть за счет введения момента трения качения (момента сопротивления качению) (рис. 11.2), равного (11.2) M тр = k N , где k - коэффициент трения качения, имеющий размерность длины, N - нормальная реакция опоры. M тр F mg F тр N Рис. 11.2 24 III. Динамика. Динамикой называется раздел механики, в котором изучается движение материальных тел под действием сил. §12. Законы Ньютона. Дифференциальные уравнения движения материальной точки. В основе динамики лежат законы, которые впервые были изложены И. Ньютоном в его классическом сочинении «Математические начала натуральной философии», изданном в 1687 году. Первый закон (закон инерции): изолированная от внешних воздействий материальная точка сохраняет свое состояние покоя или равномерного прямолинейного движения до тех пор, пока приложенные силы не заставят ее изменить это состояние. Движение, совершаемое точкой при отсутствии сил, называется движением по инерции. Система отсчета, в которой справедлив закон инерции называют инерциальной системой отсчета. При решении большинства технических задач инерциальной, с достаточной для практики точностью, можно считать систему отсчета, жестко связанную с Землей. Второй закон (основной закон динамики): произведение массы материальной точки на ускорение, которое она получает под действием данной силы, равно по модулю этой силе, а направление ускорения совпадает с направлением силы. r r ma = F . (12.1) Если на точку действует одновременно несколько сил, то основной закон динамики, принимает следующий вид r n r (12.2) ma = ∑ Fk . k =1 Второй закон динамики справедлив в инерциальной системе отсчета. Инертность – способность тела сохранят свое движение при отсутствии действующих сил, а когда на него начинает действовать сила, то скорости точек тела изменяются не мгновенно, а постепенно и тем медленнее, чем больше инертность этого тела. Количественной мерой инертности материального тела является физическая величина, называемая массой тела. Третий закон (закон равенства действия и противодействия): две материальные точки действуют друг на друга с силами, равными по модулю и направленными вдоль прямой, соединяющей эти точки, в противопо25 ложные стороны. Задачи динамики. Первая задача динамики: зная закон движения точки, определить действующую на нее силу. Вторая (обратная) задача динамики: зная действующие на точку силы, определить закон движения точки. Положение материальной точки в инерциальной системе отсчета, как известно можно определять ее радиус-вектором. Сила, действующая на точку, в общем случае может зависеть от положения точки, скорости и времени. Следовательно, основное уравнение динамики точки (12.1) можно записать: r r r r m && r = F ( r , r& , t ) . (12.3) Это равенство является дифференциальным уравнением, в котором радиус-вектор является функцией, а время – аргументом. Это уравнение называется дифференциальным уравнением движения материальной точки в векторной форме. Спроектируем обе части уравнения (12.3) на неподвижные оси декартовых координат и учтем, что на точку могут действовать несколько сил. n n n m && x = ∑ Fkx , m && y = ∑ Fky , m && z = ∑ Fkz . k =1 k =1 (12.4) k =1 Уравнения (1.4) являются дифференциальными уравнениями движения точки в прямоугольных декартовых координатах. §13. Механическая система. Центр масс. Дифференциальные уравнения движения центра масс. Совокупность материальных точек или тел, движение (или равновесие) которой рассматривается, называют механической системой. Действующие на механическую систему силы разделяют на внешние ܨԦ и внутренние ܨԦ . Внешними называют силы, действующие на точки или тела системы со стороны точек или тел, не входящих в данную систему. Внутренними называют силы, с которыми точки или тела данной системы действуют друг на друга. Внутренние силы обладают следующими свойствами: 1. Геометрическая сумма (главный вектор) всех внутренних сил системы равняется нулю. 26 ri F ∑ k = 0. n (13.1) k =1 2. Сумма моментов (главный момент) всех внутренних сил системы относительно любого центра или оси равняется нулю. n n r ri ri (13.2) M ( F ) = 0; M ( F ∑ O k ∑ x k ) = 0. k =1 k =1 Центром масс или центром инерции называется геометрическая точка, радиус-вектор которой определяется равенством: r 1 n r (13.3) rc = ∑ mk rk , µ k =1 n здесь µ = ∑ mk - масса системы. k =1 Рассмотрим систему, состоящую из n материальных точек. Обозначим re r Fk – равнодействующую всех приложенных к k -ой точке внешних сил, Fki – равнодействующую всех внутренних сил, тогда каждую точку можно рассматривать как свободную, и записать для неё второй закон Ньютона: r r r m && r = F e + F i , k = 1, n . (13.4) k k k k Данная система n уравнений представляет собой дифференциальные уравнения движения системы в векторной форме. Теорема о движении центра масс системы: произведение массы системы на ускорение ее центра масс равно геометрической сумме всех действующих на систему внешних сил. n r r (13.5) µ && rc = ∑ Fke . k =1 В проекции на оси координат равенство (13.5) имеет вид: n n n µ && xc = ∑ Fkxe , µ && yc = ∑ Fkye , µ && zc = ∑ Fkze . k =1 k =1 (13.6) k =1 Уравнения (13.6) также называют дифференциальными уравнениями движения центра масс системы. Если сумма внешних сил, действующих на систему, равна нулю, тогда из уравнения (13.5) следует, что центр масс этой системы движется равномерно и прямолинейно или находится в покое. Этот результат выражает собой закон сохранения движения центра масс системы. 27 §14. Количество движения. Импульс силы. Теорема об изменении количества движения. Количеством движения материальной точки называется векторная r величина mv , равная произведению массы точки на ее скорость. r Направлен вектор mv так же, как и скорость точки, т.е. по касательной к ее траектории. Количеством движения механической системы называют векторную величину, равную геометрической сумме количеств движения всех точек системы: r n r (14.1) Q = ∑ mk vk . k =1 Количество движения системы также можно по формуле: r r Q = µ vc . (14.2) Для характеристики действия, оказываемого на тело силой за некоторый промежуток времени, вводится понятие импульса силы. Элементарным импульсом силы называется векторная величина, равная произведению силы на элементарный промежуток времени: r r dS = F dt . (14.3) Направлен элементарный импульс вдоль линии действия силы. За конечный промежуток времени t1 импульс силы вычисляется: r t1 r S = ∫ F dt . (14.4) 0 Теорема об изменении количества движения системы в дифференциальной форме: производная по времени от количества движения системы равна геометрической сумме всех действующих на систему внешних сил. r n r dQ (14.5) = ∑ Fke . dt k =1 Теорема об изменении количества движения системы в интегральной форме: изменение количества движения системы за некоторый промежуток времени равно сумме импульсов, действующих на систему внешних сил за тот же промежуток времени. n r r r (14.6) Q1 − Q0 = ∑ S ke , k =1 28 r r здесь Q0 – количество движения системы в момент времени t = 0 , Q1 – ко- личество движения системы в момент времени t1 . Если сумма всех внешних сил, действующих на систему, равна нулю, то из уравнения (14.5) следует, что при этом количество движения системы остается постоянным по модулю и направлению. n r r e F = 0 ⇒ Q = const. ∑ k k =1 Это следствие выражает закон сохранения количества движения системы (закон сохранения импульса). §15. Момент инерции. Осевой момент инерции играет при вращательном движении тела такую же роль, какую масса при поступательном, т.е. осевой момент инерции является мерой инертности тела при вращательном движении. Моментом инерции точки относительно данной оси (или осевым моментом инерции) называется скалярная величина, равная произведению массы точки на квадрат расстояния до этой оси. J z = mh2 . (15.1) Моментом инерции системы относительно данной оси называется скалярная величина, равная сумме моментов инерций всех точек, входящих в систему: n J z = ∑ mk hk2 . (15.2) k =1 Единицы измерения момента инерции в СИ – [кг / м 2 ] . Радиусом инерции ρ относительно оси, называют расстояние от оси до точки, в которой нужно сосредоточить массу всего тела, чтобы момент инерции точки относительно данной оси равнялся моменту инерции тела относительно той же оси. По определению имеем: J z = mρ 2 , (15.3) здесь m – масса системы, J z – ее момент инерции относительно данной оси, ρ – радиус инерции системы относительно этой же оси. Момент инерции относительно произвольной оси, параллельной данной находится с помощью теоремы Гюйгенса – Штейнера: момент инерции тела относительно данной оси равен моменту инерции относительно оси, 29 ей параллельной, проходящей через центр масс тела, сложенному с произведением массы всего тела на квадрат расстояния между осями. J z ' = J cz + md 2 (15.4) Моменты инерции некоторых тел. 1. Тонкий однородный стержень. 1 ось проходит через конец стержня: J = ml 2 , 3 1 ось проходит через центр стержня: J = ml 2 . 12 2. Тонкое круглое однородное кольцо: J = mR 2 . 1 3. Круглая однородная пластина или цилиндр: J = mR 2 . 2 2 4. Сплошной шар: J = mR 2 . 5 §16. Теорема об изменении кинетического момента. Моментом количества движения точки относительно некоторого центра O называется векторная величина, определяемая равенством: r r r r M O ( mv ) = r × m v , (16.1) где ݎԦ– радиус-вектор движущейся точки, проведенный из центра O . MO mv mv h О M r Рис. 16.1 Вектор момента количества движения точки направлен перпендикулярно плоскости, проходящей через вектор количества движения и центр O , в ту сторону, откуда движение точки вокруг выбранного центра видно происходящим против хода часовой стрелки (рис. 16.1). Его модуль равен: r M O ( mv ) = mvh . (16.2) Главным моментом количеств движения (или кинетическим моментом) системы относительно данного центра называется величина равная 30 геометрической сумме моментов количеств движения всех точек системы относительно этого центра. n r r r (16.3) K O = ∑ M O ( mk vk ) . k =1 Проекция вектора кинетического момента на какую-либо ось называется кинетическим моментом относительно данной оси. Кинетический момент тела, вращающегося вокруг неподвижной оси OZ , находится по формуле: K z = J zω , (16.4) где J z момент инерции тела относительно оси вращения, ω – угловая скорость тела. Теорема об изменении кинетического момента относительно центра (теорема моментов для системы): производная по времени от кинетического момента, взятого относительно некоторого неподвижного центра, равна сумме моментов всех внешних сил системы относительно того же центра: r n r r dK O (16.5) = ∑ M O Fke . dt k =1 Данную теорему можно записать относительно координатных осей: n n n re re r dK y dK x dK z (16.6) = ∑ M x Fk , = ∑ M y Fk , = ∑ M z Fke . dt dt dt k =1 k =1 k =1 Если тело вращается вокруг неподвижной оси OZ и при этом момент инерции относительно данной оси J z остается постоянным, то с учетом ( ) ( ) ( ) (16.4) последнее равенство (16.6) можно записать в виде: n r && J z φ = ∑ M z Fke . k =1 ( ) ( ) (16.7) Равенство (16.7) называется дифференциальным уравнением вращательного движения твердого тела вокруг неподвижной оси. Если сумма моментов, относительно некоторого центра, всех внешних сил, действующих на систему, равна нулю, то, как следует из (16.5), кинетический момент относительно того же центра остается постоянным по модулю и направлению. n r re r M F = 0 ⇒ K ∑ O k O = const . k =1 ( ) 31 Данное следствие выражает закон сохранения кинетического момента (момента импульса). §17. Работа. Мощность. Элементарной работой силы называется скалярная величина равная скалярному произведению вектора силы на вектор элементарного перемещения точки ее приложения. r r dA = F ⋅ dr (17.1) Расписав скалярное произведение, v F формулу (17.1) можно записать в виде: dA = Fcosα ⋅ ds = Fτ ⋅ ds , (17.2) dr где α – угол между вектором силы и каM 1 сательной осью, Fτ = Fcosα – проекция r M0 Fn силы F на касательную ось (рис. 17.1), n ds – модуль элементарного перемещеРис. 17.1 ния точки. Расписав выражение (17.1) через проекции векторов, входящих в скалярное произведение, получим: (17.3) dA = Fx ⋅ dx + Fy ⋅ dy + Fz ⋅ dz . M F Работа силы на любом конечном перемещении М 1 М 2 равна взятому вдоль этого перемещения интегралу от элементарной работы: M2 M2 r r M2 AM1M 2 = ∫ dA = ∫ F ⋅ dr = ∫ Fτ ⋅ ds . M1 M1 (17.4) M1 r Если сила остается постоянной по модулю и направлению ( F = const ), то работа этой силы по перемещению точки вдоль некоторой траектории из положения М 1 в положение М 2 , равна: A = F ⋅ s ⋅ cosα , (17.5) здесь s – кратчайшее расстояние между начальным и конечным положениями точки (длина вектора перемещения), α – угол между вектором силы и вектором перемещения. Если угол α острый, то работа положительна, если угол α тупой, то работа отрицательна и если угол α = 90° , то работа силы равна нулю. При вращении тела вокруг неподвижной оси OZ под действием силы r F , элементарная работа этой силы равна: r dA = M z ( F ) ⋅ dφ . (17.6) 32 При повороте тела на конечный угол φ1 , работа равна: φ1 r A = ∫ M z ( F ) ⋅ dφ . (17.7) 0 Если момент силы остается постоянным, то работа силы, при повороте тела на угол φ1 , равна: r A = M z ( F ) ⋅ φ1 . (17.8) Единицей измерения работы в СИ является джоуль 1Дж = 1Н ⋅ м . Мощностью называется величина, равная работе, совершаемой силой за единицу времени. r dA r dr r r N= =F = F ⋅ v = Fτ ⋅ v . (17.9) dt dt Если тело вращается вокруг неподвижной оси OZ , то мощность, равна: r dφ r dA N= = M z (F ) = M z (F ) ⋅ ω . (17.10) dt dt Единицей измерения мощности в СИ является ватт 1Вт = 1Дж / с . §18. Потенциальное силовое поле. Потенциальная энергия. Часть пространства, в каждой точке которого на находящуюся там материальную точку действует некоторая сила, зависящая только от положения этой точки, называется силовым полем. Проекции силы поля на координатные оси являются некоторыми однозначными и непрерывными функциями от координат, т.е. Fx = Fx ( x, y , z ), Fy = Fy ( x, y , z ), Fz = Fz ( x, y , z ) . Ели для данного силового поля существует функция координат Π( x, y, z ) такая, что ∂Π ∂Π ∂Π , Fy = − , Fz = − , (18.1) ∂x ∂y ∂z то данное силовое поле называется потенциальным. Функция Π называется потенциальной энергией данного силового поля, а силы, действующие в таком поле – потенциальными или консервативными. Для выяснения физического смысла найдем выражение для элементарной работы силы потенциального поля. Согласно (17.3), имеем: ∂Π ∂Π ∂Π dA = Fx dx + Fy dy + Fz dz = − dx + dy + dz = − dΠ , (18.2) ∂x ∂y ∂z Fx = − 33 т.е. элементарная работа силы потенциального поля равна полному дифференциалу потенциальной энергии взятому со знаком минус. Тогда работа силы потенциального поля при перемещении точки из положения M 1 в положение M 2 равна: M2 AM1M 2 = − ∫ dΠ = Π 1 − Π2 . (18.3) M1 Итак, работа силы потенциального поля равна разности потенциальных энергий в начальном и конечном положениях, и следовательно не зависит ни от вида, ни от длины траектории по которой перемещается точка. Силы, работа которых зависит от вида траектории или от закона движения точки приложения силы, называют непотенциальными или неконсерввативными (например: сила трения, сила сопротивления среды). Из (18.3) следует, что работа сил потенциального поля на всякой замкнутой траектории равна нулю. Потенциальная энергия определена с точностью до произвольной постоянной. Чтобы определить эту постоянную считают в некоторой точке, называемой «нулевой точкой», потенциальная энергия равна нулю Π 0 = 0 . Нулевую точку выбирают произвольно. Потенциальную энергию в данном положении М 1 также можно определить как работу, которую нужно совершить силам поля, чтобы переместить точку из данного положения в нулевое: (18.4) Π1 = AM1 0 . Геометрическое место точек, в которых потенциальная энергия сохраняет постоянное значение, образует поверхность, которая называется эквипотенциальной поверхностью или поверхностью уровня. Потенциальная энергия некоторых силовых полей: 1. Потенциальная энергия поля силы тяжести F = mg равна Π = mgh . 2. Потенциальная энергия поля гравитационной силы F = G равна m1m2 . r Нулевая точка находиться в бесконечности. Π = −G 34 m1m2 r2 3. Потенциальная энергия поля силы упругости F = −cx равна cx 2 Π= . 2 За нулевую точку взята x = 0 . §19. Теорема об изменении кинетической энергии. Закон сохранения энергии. Кинетической энергией материальной точки называется скалярная величина, равная половине произведения массы точки на квадрат ее скорости. Кинетической энергией материальной системы называется сумма кинетических энергий всех точек, входящих в систему: 1 n mk vk2 . (19.1) ∑ 2 k =1 Кинетическая энергия тела при поступательном движении: 1 T = mv 2 . (19.2) 2 Кинетическая энергия тела при вращении вокруг неподвижной оси T= ܱܼ: 1 J z ω2 . (19.3) 2 Кинетическая энергия тела при плоскопараллельном движении: 1 1 T = mvc2 + J zc ω 2 , (19.4) 2 2 здесь vc – скорость центра масс, J zc – момент инерции, относительно оси T= проходящей через центр масс, перпендикулярной плоскости движения тела. Теорема об изменении кинетической энергии системы в интегральной форме: изменение кинетической энергии системы при некотором ее перемещении равно сумме работ на этом перемещении всех приложенных к системе внешних и внутренних сил. n n T1 − T0 = ∑ Ake + ∑ Aki , k =1 (19.5) k =1 здесь T0 – начальная кинетическая энергия системы, T1 – конечная кинетическая энергия системы. 35 Если система неизменяемая, т.е. такая система в которой расстояние между каждыми двумя взаимодействующими точками остается во все время движения постоянными, то сумма работ всех внутренних сил равна нулю, и теорема (19.5) запишется: n T1 − T0 = ∑ Ake . (19.6) k =1 Если все действующие на систему внешние и внутренние силы потенциальны, то, согласно (18.3) можно записать: ∑A k = Π 0 − Π1 , сравнение с формулой (19.5), даёт: T1 + Π1 = T0 + Π 0 = const . (19.7) Следовательно, при движении под действием потенциальных сил сумма кинетической и потенциальной энергий системы в каждом ее положении остается величиной постоянной. В этом и состоит закон сохранения механической энергии. Величина E = T + Π называется полной механической энергией системы. §20. Принцип Даламбера. Уравнения кинетостатики. Рассмотрим движение точки под действием сил, равнодействующую r которых обозначим F , и запишем для нее второй закон Ньютона: r r F = ma , r r F u = −ma , введя обозначение (20.1) получим: r r F + Fи = 0. (20.2) rи Вектор F , равный по модулю произведению массы точки на ее ускорение и направленный противоположно вектору ускорения, называется силой инерции. Равенство (20.2) представляет собой Принцип Даламбера для точки: если в любой момент времени ко всем действующим на точку силам прибавить силу инерции, то полученную систему сил формально можно считать уравновешенной и применять к ней уравнения статики. r Рассмотрим систему из n материальных точек. Обозначив Fki – сумму r всех действующих на k -ую точку внутренних сил, Fke – сумму всех дей- 36 ствующих на k -ую точку внешних сил и составив для каждой точки равенство (20.2), получим: r r r Fke + Fki + Fkи = 0, k = 1, n . (20.3) Данное равенство, выражает принцип Даламбера для системы: если в любой момент времени к каждой из точек системы помимо действующих на нее внешних и внутренних сил прибавить силы инерции, то полученную систему можно формально считать уравновешенной и применять к ней уравнения статики. Уравнения кинетостатики позволяют решать задачи динамики, составляя уравнения в таком же виде, как это делается в статике. Они аналогичны уравнениям статики. Rxe + Rxи = 0, R ye + R yи = 0, Rze + Rzи = 0, (20.4) M xe + M xи = 0, M ye + M yи = 0, M ze + M zи = 0, здесь Rxи , Ryи , Rzи проекции на оси координат главного вектора сил инерции n r rи R = ∑ Fkи , M xи , M yи , M zи проекции на оси координат главного момента сил k =1 n r r r инерции M и = ∑ M O Fkи . k =1 Главный вектор сил инерции механической системы (твердого тела) равен произведению массы системы (тела) на ускорение центра масс и направлен противоположно этому ускорению. r r R и = − mac . (20.5) Главный момент сил инерции механической системы (твердого тела) относительно некоторого центра O равен, взятой со знаком минус, производной по времени от кинетического момента системы (тела), относительно того же центра. r rи dK o . (20.6) Mo = − dt 1. При поступательном движении силы инерции твердого тела приводятся к равнодействующей (20.5) проходящей через центр масс тела и направленной в сторону, противоположную ускорению. 2. При вращении вокруг оси, проходящей через центр масс тела, система сил инерции тела приводится к одной только паре с моментом, по модулю равным 37 M czи = J cz ε , (20.7) и направленным противоположно угловому ускорению ε . 3. При плоскопараллельном движении, если тело имеет плоскость симметрии и движется параллельно этой плоскости, то, система сил инерции тела приводится к силе (20.5) приложенной в центре масс тела, и паре сил с моментом (20.7). §21. Связи. Принцип возможных перемещений. Общее уравнение динамики. Система материальных точек называется свободной, если положения отдельных ее точек и их скорости могут принимать произвольные значения. В противном случае система называется несвободной. Любого вида ограничения, которые налагаются на положения и скорости точек механической системы называются связями, которые выполняются независимо от того, какие на систему действуют силы. Связи, которые описываются уравнениями, называются удерживающими (налагаемые ими ограничения сохраняются при любом положении системы). Например: шарнирная опора. Связи, описание которых осуществляется с помощью неравенств, называются неудерживающими (от таких связей система может «освобождаться»). Например: нить, поверхность. Связи, налагающие ограничения на координаты и скорости точек системы и выражаемые аналитически уравнениями вида f (t , x1, y1, z1, …, xn , yn , zn , x&1 , y&1, z&1, …, x&n , y& n , z&n ) = 0 носят общее название кинематических. Если время не входит в уравнение (или неравенство) связи в явном виде, то связь называется стационарной. Если же связь зависит от времени явно, то она называется нестационарной. Кинематические связи, уравнения которых не содержат скоростей или путем интегрирования могут быть к такому виду приведены, называются голономными, в противном случае – неголономными. Возможным (виртуальным) перемещением данной системы называется всякое элементарное перемещение ее точек, допускаемое в данный момент времени наложенными на систему связями. r Возможное перемещение точки обозначают символом δr а δx, δy, δz – проекции его на координатные оси. 38 Символом δ обозначают вариацию функции – это бесконечно малое приращение некоторой функции f (t , x, y, z ) , вычисляемое в предположении, что аргумент t является фиксированным параметром, а x, y, z представляют изменяющиеся независимо от t величины. Формально вариация вычисляется так же как дифференциал. При стационарных связях действительное перемещение любой точки системы, совпадает с одним из возможных перемещений. При нестационарных связях действительное не совпадает ни с одним из возможных перемещений. Число независимых между собой возможных перемещений механической системы называются числом степеней свободы этой системы. Возможной работой называется элементарная работа, которую действующая на материальную точку сила могла бы совершить на возможном перемещении этой точки r r δA = F ⋅ δr . (21.1) Идеальными называются связи, для которых сумма элементарных работ их реакций на любом возможном перемещении системы равна нулю n r n r N δ A = ∑ k ∑ N k ⋅ δr = 0 . k =1 k =1 Принцип возможных перемещений: для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на нее активных сил при любом возможном перемещении системы была равна нулю: n r n r a δ A = (21.2) ∑ k ∑ Fka ⋅ δr = 0 . k =1 k =1 Активной называется сила, которая начав действовать на покоящееся тело, может привести его в движение. Этот принцип дает общий метод решения задач статики для систем с идеальными голономными связями. Причем уравнение в (21.2) не входят наперед неизвестные реакции связи, что существенно упрощает решение. Принцип возможных перемещений дает общий метод решения задач статики. С другой стороны, принцип Даламбера позволяет использовать методы статики для решения задач динамики. Следовательно, применяя эти два принципа одновременно, можно получить общий метод решения задач динамики. 39 Принцип Даламбера – Лагранжа: при движении механической системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равна нулю. ∑δA + ∑δA a k где ∑δA a k и k = 0, – сумма возможных работ всех активных сил системы, (21.3) ∑δA и k – сумма возможных работ всех сил инерции системы. Уравнение (21.3) называется общим уравнением динамики. §22. Обобщенные координаты. Уравнение Лагранжа второго рода. Независимые между собой параметры любой размерности, число которых равно числу степеней свободы системы и которые однозначно определяют ее положение, называют обобщенными координатами системы. Обозначаются обобщенные координаты буквой q . Тогда положение системы, имеющей s степеней свободы, будет определяться s обобщенными координатами q1 , q2 ,…, qs . Первые производные от обобщенных координат по времени называются обобщенными скоростями, и обозначаются: q&1 , q&2 ,…, q&s . Вторые производные от обобщенных координат по времени называются обобщенными ускорениями, и обозначаются: q&&1 , q&&2 ,…, q&&s . Так как положение системы однозначно определяется обобщенными координатами, а положение каждой точки системы определяется ее радиусвектором, то его можно выразить через обобщенные координаты: r r (22.1) rk = rk ( q1 , q2 ,… qs ), k = 1, n . Перейдем к определению обобщенных сил, для этого запишем вариацию радиус-вектора через вариации обобщенных координат r s r ∂rk δrk = ∑ δq j , k = 1, n (22.2) j =1 ∂q j и подставим в выражение для возможной работы всех активных сил: r n r n r s r ∂rk a a a δA = ∑ Fk ⋅ δrk = ∑ Fk ⋅ ∑ δq j , k =1 k =1 j =1 ∂q j или меняя порядок суммирования 40 r a ∂rrk δA = ∑∑ Fk ⋅ δq j , ∂q j j =1 k =1 s n a введя обозначение: r a ∂rrk Q j = ∑ Fk ⋅ , j = 1, s , q ∂ k =1 j n (22.3) получим: s δAa = ∑ Q j ⋅ δq j . (22.4) j =1 Множитель Q j при вариации обобщенной координаты в выражении для возможной работы активных сил системы называется обобщенной силой, соответствующей обобщенной координате q j . Обобщенная сила Q j , в общем случае не является силой в обычном понимании этого слова. Ее размерность зависит от размерности соответствующей ей обобщенной координаты q j , и определяется равенством Qj = [ Дж ] , q j Для вычисления обобщенной силы Q1 придают системе такое воз- можное перемещение, при котором вариации всех обобщенных координат, кроме δq1 равны нулю, и вычисляют на этом перемещении возможную работу всех активных сил приложенных к системе, множитель, получившийся при вариации δq1 и есть обобщенная сила Q1 , соответствующая обобщенной координате q1 . Аналогичным образом вычисляются остальные обобщенные силы. Уравнения Лагранжа второго рода для системы с голономными связями имеют следующий вид: d ∂T dt ∂q& j ∂T (22.5) = Q j , j = 1, s , − q ∂ j где T – кинетическая энергия системы. Количество уравнений Лагранжа второго рода равно числу степеней свободы системы. 41 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. 12. 13. 14. 15. 16. 17. 18. 19. 20. 21. 22. 23. Вопросы к экзамену. Способы задания движения точки. Скорость и ускорение при различных способах задания движения. Вращение твердого тела вокруг неподвижной оси. Угловая скорость, угловое ускорение, их связь с линейной скоростью и ускорением. Плоское движение твердого тела. Скорость произвольной точки при плоском движении. Теорема о проекциях скоростей двух точек. Мгновенный центр скоростей (МЦС), частные случаи определения МЦС. Ускорение произвольной точки при плоском движении. Сложное движение точки. Абсолютное, переносное и относительное движение. Теорема о сложении скоростей. Теорема о сложении ускорений при сложном движении точки. Ускорение Кориолиса. Основные понятия и аксиомы статики. Связи и их реакции. Распределенные силы. Момент силы относительно центра и оси. Пара сил момент пары. Теорема о параллельном переносе силы. Приведение произвольной системы сил к данному центру. Условия равновесия пространственной и плоской систем сил. Трение скольжения, трение качения. Законы Ньютона. Дифференциальные уравнения движения материальной точки . Механическая система. Центр масс. Дифференциальные уравнения движения центра масс. Количество движения. Импульс силы. Теорема об изменении количества движения. Момент инерции. Теорема об изменении кинетического момента. Работа. Мощность. Потенциальное силовое поле. Потенциальная энергия. Теорема об изменении кинетической энергии. Закон сохранения энергии. Принцип Даламбера. Уравнения кинетостатики. Связи. Принцип возможных перемещений. Общее уравнение динамики. Обобщенные координаты. Уравнение Лагранжа второго рода. 42 Литература 1. 2. 3. 4. Тарг С. М. Краткий курс теоретической механики : учебник для втузов / С. М. Тарг. - изд. 16-е, стер. - М. : Высш. шк., 2006. - 416 с. Бутенин Н. В. Курс теоретической механики : учеб. пособие для вузов. В 2 т. / Н. В. Бутенин, Я. Л. Лунц, Д. Р. Меркин. - Изд. 11-е, стер. СПб. [и др.] : Лань, 2009. - 729 с. Диевский В. А. Теоретическая механика : учеб. пособие для вузов / В. А. Диевский. - Изд. 3-е, испр. - СПб. [и др.] : Лань, 2009. – 319 с. Воронков И.М., Курс теоретической механики: учебник для втузов / И.М. Воронков, - 11-е изд. – М.: Наука, 1964. – 596 с. 43