Министерство науки и высшего образования Российской Федерации
Федеральное государственное бюджетное
образовательное учреждение высшего образования
«Комсомольский-на-Амуре государственный университет»
Факультет энергетики и управления
Кафедра ЭПАПУ
РАСЧЁТНО-ГРАФИЧЕСКАЯ РАБОТА
по дисциплине «Теория автоматического управления»
Студент группы 0ЭПба-1
И.О. Фамилия
Преподаватель
Д.О. Савельев
2023
Содержание
Введение......................................................................................................... 3
Математическое описание нелинейной САУ ................................ 4
Описание нелинейной системы на фазовой плоскости ................ 6
1.2.1 Описание линейной системы в режиме автоколебаний ....... 6
1.2.2 Описание
линейной
системы
в
режиме
отсутствия
автоколебаний ............................................................................................... 8
Исследование
нелинейной
системы
на
основе
метода
гармонической линеаризации, определение параметров автоколебаний в
системе 10
Заключение .................................................................................................. 14
Список использованных источников ........................................................ 15
2
Введение
Система автоматического управления или регулирования называется
нелинейной в том случае, если хотя бы одно звено системы описывается нелинейным уравнением (обладает нелинейной характеристикой). Линейные
системы любого вида становятся нелинейными, если хотя бы в одном звене
системы имеется какое-либо отклонение от линейной зависимости. Поэтому
класс возможных нелинейных систем весьма широк.
Строго говоря, все реальные системы является в большей или меньшей
степени нелинейными. Однако во всех случаях, когда с инженерной точки
зрения допустимо рассматривать линеаризованную систему, обращаются к
линейной теории как более простой и более разработанной. И только тогда,
когда нелинейность играет существенную роль в поведении системы, прибегают к теории нелинейных систем. Последняя становится более важной для
практики по мере повышения требований к качеству процессов и к точности
расчёта систем автоматического управления и регулирования.
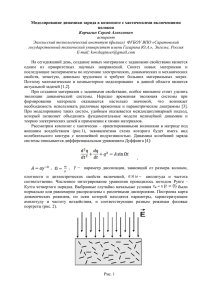
Целью расчётно-графической работы является анализ нелинейной
САУ. В данной расчётно-графической работе будет рассмотрена статически
нелинейность релейного типа с коэффициентом возврата меньше единицы. В
работе необходимо привести описание нелинейной замкнутой системы на
фазовой плоскости, а также графики фазовой траектории системы на фазовой
плоскости. Необходимо определить параметры автоколебательного режима
(амплитуда и частота) тремя разными способами: используя вид предельного
цикла, график свободного движения в периодическом режиме, метод гармонической линеаризации.
В расчётно-графической работе также будет рассмотрено описание
САУ в пространстве состояний. В этом разделе работы необходимо привести
детализированную структуру САУ, систему дифференциальных и алгебраических уравнений и привести графики изменения переменных состояния.
3
Математическое описание нелинейной САУ
Таблица 1 – Параметры для расчёта нелинейной САУ
k1
k2
T1, с
M
Xx
X0
2
1
5
7
5
7
Xвх(t)
X(t)
НЭ
Xвых(t)
Xнэ(t)
W1(p)
-
W2(p)
Рисунок 1 – структурная схема нелинейной системы
xвых
M
-x0
-xx
xx
x0
xвх
-М
Рисунок 2 – статическая характеристика нелинейного элемента
4
Передаточная функция линейной части:
Wлч (p) =
где
Xвых (p)
k
=
,
Xнэ (p)
T1 p2 + p
(1)
k = k1 ∙ k 2 – коэффициент усиления линейной части.
Из формулы 1 следует:
T1 p2 Xвых (p) + pXвых (p) = kXнэ (p).
Дифференциальное уравнение:
d2 Xвых (t) dXвых (t)
T1
+
= kXнэ (t).
dt 2
dt
Так как движение свободное, следовательно, Xвх = 0, при этом
Xвых (𝑡) = −X(t), где X(t) – сигнал ошибки.
d2 X(t) dX(t)
T1
+
= −kXнэ (t).
dt 2
dt
Система дифференциальных уравнений, при
dX(t)
dt
<0
d2 X(t) dX(t)
T1
+
= k ∙ M, Xвх > Xх
dt 2
dt
d2 X(t) dX(t)
T1
+
= 0, X0 < Xвх < Xх
dt 2
dt
d2 X(t) dX(t)
{T1 dt 2 + dt = −k ∙ M, Xвх < −X0
Система дифференциальных уравнений, при
dX(t)
dt
>0
d2 X(t) dX(t)
T1
+
= −k ∙ M, Xвх < −Xх
dt 2
dt
d2 X(t) dX(t)
T1
+
= 0, −Xх < Xвх < X0
dt 2
dt
d2 X(t) dX(t)
Xвх > X0
{T1 dt 2 + dt = k ∙ M,
5
Описание нелинейной системы на фазовой плоскости
1.2.1 Описание линейной системы в режиме автоколебаний
На рисунке 3 изображён автоколебательный режим с начальными
условиями X=0, Y=-4
Рисунок 3 – Фазовая траектория устойчивого автоколебательного режима
X(t)
t
Рисунок 4 – График сигнала ошибки и график нелинейного элемента
6
На рисунке 5 изображён автоколебательный режим с начальными
условиями X=0, Y=1.5
Рисунок 5 – Фазовая траектория неустойчивого автоколебательного режима
X(t)
t
Рисунок 6 – График сигнала ошибки и график нелинейного элемента
7
1.2.2 Описание линейной системы в режиме отсутствия автоколебаний
На рисунке 7 изображено отсутствие автоколебательного режима, на
рисунке 8 изображены график сигнала ошибки и график нелинейного элемента с начальными условиями X=0, Y=4, T=2, k=1
Рисунок 7 – Фазовая траектория без автоколебательного режима
8
X(t)
t
Рисунок 8 – График сигнала ошибки и график нелинейного элемента
9
Исследование нелинейной системы на основе метода гармонической
линеаризации, определение параметров автоколебаний в системе
Комплексный коэффициент гармонической линеаризации:
Wнэ (A) = q(A) + j ∙ q1 (A),
2M
X0 2
X0 2 ∙ C2
q(A) =
∙ (√1 − 2 + √1 −
),
π∙A
A
A2
q1 (A) =
где
−2M ∙ X0
∙ (1 − C),
π∙A
C = X x ⁄X 0 .
Т.к. система совершает периодические свободные движения то годо-
граф АФХ проходит через координаты (-1; j0), то есть:
Wнэ (jA) ∙ Wлч (jω) = −1,
Wлч (jω) =
Wлч (jω) =
−1
,
Wнэ (jA)
−1
.
q(A) + j ∙ q1 (A)
Годограф линейной части и обратный годограф нелинейного элемента
представлены на рисунке 9.
10
W(ω)
Wлч(ω)
ω→∞
А→∞
Рисунок 9 – Годограф линейной части и обратный годограф нелинейного
элемента
Точка пересечения соответствует устойчивым автоколебаниям, следовательно:
{
𝐼𝑚(Wлч (jω)) = 𝐼𝑚(Wнэ (jA))
𝑅𝑒(Wлч (jω)) = 𝑅𝑒(Wнэ (jA))
Решив систему уравнений (2) получим:
A = 7.2,
ω = 0.343 рад/с.
11
(2)
Рисунок 10 – Аппроксимированный предельный цикл
Амплитуда и частота колебаний, определённые с помощью аппроксимации:
A = 7.1,
ω = 0.303 рад/с.
12
X(t)
7.1
t
7.6
24.4
Рисунок 11 – График сигнала ошибки в свободном движении
Из рисунка 11 следует:
A = 7.1;
ω=
2π
= 0.373 рад/с.
24.4 − 7.6
13
Заключение
Путём изменения начальных условий нелинейной замкнутой системы в
расчётно-графической работе были получены графики сходящихся и расходящихся автоколебаний на фазовой плоскости. Параметры автоколебаний
были определены тремя способами: используя вид предельного цикла, по
графику сигнала ошибки в свободном движении, методом гармонической
линеаризации. Полученные результаты отличны друг от друга малой погрешностью измерений.
Во втором разделе расчётно-графической работы по приведённой детализированной структуре линейной замкнутой системы с двумя входными и
двумя выходными сигналами были составлены система дифференциальных и
система алгебраических уравнений. Были получены матрица коэффициентов
системы, матрица управлений и матрица наблюдения. Путём решения однородного матричного уравнения с помощью теоремы Сильвестра, были получены графики изменения переменных состояния. Проведена оценка поведения системы в свободном движении на основании решения матричного дифференциального уравнения.
Нелинейные управляющие устройства позволяют в широком рабочем
диапазоне непосредственно решать проблемы, связанные с нелинейностями.
Качественное проектирование нелинейных законов управления может быть
более простым и интуитивно понятным по сравнению с их линейными аналогами. Также обычно при проектировании линейных управляющих устройств
предполагают, что параметры объекта управления неизменны и известны.
Однако во многих задачах управления приходится иметь дело с непосредственностями в модели объекта управления. Нелинейности могут быть намеренно включены в управляющее устройство системы управления, так что неопределённости модели могут быть терпимы.
14
Список использованных источников
1
Глазырин, Г. В. Теория автоматического регулирования / Г. В.
Глазырин. - Новосиб. : НГТУ, 2014. – 168 с.
2
Петрова, А. М. Автоматическое управление: Учебное пособие /
А. М. Петрова. – М. : Форум, 2010. – 240 с.
3
Журомский, В.М. Нелинейные системы автоматического управ-
ления: Учебное пособие / В.М. Журомский. – М. : НИЯУ «МИФИ», 2012. –
56 с.
4
Лазута, И. В. Теория автоматического управления. Нелинейные
системы: Учебное пособие / И. В. Лазута, В. С. Щербаков. – Омск : СибАДИ,
2017. – 161 с.
5
Евсюков, В. Н. Нелинейные системы автоматического управле-
ния: Учебное пособие / В. Н. Евсюков. – Оренбург : ГОУ ОГУ, 2007. – 172 с.
15