Системы управления химико-технологическими процессами. В 2 ч. Ч. 1 (Гаврилов А.Н., Пятако Ю.В.) (z-lib.org)
реклама
 (z-lib.org)")
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
ФГБОУ ВПО
«ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ
УНИВЕРСИТЕТ ИНЖЕНЕРНЫХ ТЕХНОЛОГИЙ»
А. Н. ГАВРИЛОВ, Ю. В. ПЯТАКОВ
СИСТЕМЫ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
Ч. 1
Утверждено
редакционно-издательским советом университета
в качестве учебного пособия
ВОРОНЕЖ
2014
1
УДК 35:66.02
ББК Л 10-5-05 я7
Г12
Научный редактор профессор А. А. ХВОСТОВ
Р е ц е н з е н т ы:
кафедра информационных технологий моделирования и управления
Московского гуманитарно-экономического института
(Воронежский филиал);
д-р техн. наук М.Г. МАТВЕЕВ
(Воронежский государственный университет)
Печатается по решению
редакционно-издательского совета
Воронежского государственного университета инженерных технологий
Г12
Гаврилов, А. Н.
Системы управления химико-технологическими процессами. В 2 ч.
Ч. 1 [Текст] : учеб. пособие / А. Н. Гаврилов, Ю. В. Пятаков; Воронеж.
гос. ун-т инж. технол. - Воронеж : ВГУИТ, 2014. -220 с.
ISBN 978-5-00032-042-6
Учебное пособие разработано в соответствии с требованиями ФГОС ВПО подготовки выпускников по направлению 220700.62 – «Автоматизация технологических процессов и производств» (профиль – «Автоматизация технологических процессов и производств (по отраслям)»)
и предназначено для закрепления теоретических знаний дисциплин цикла Б3. В пособии изложены теоретические сведения построения систем управления, основные методы и средства измерения технологических параметров, используемых в пищевой и химической промышленности, даны основные аспекты проектирования, создания и эксплуатации современных АСУ ТП.
Г
0605010201-11
Без объявл .
ОК2(03)-2014
ISBN 978-5-00032-042-6
УДК 35.66.02
ББК Л 10 - 5 - 05 я7
Гаврилов А.Н., Пятаков Ю.В.,
2014
© ФГБОУ ВПО «Воронеж. гос. ун-т
инж. технол.», 2014
Оригинал-макет данного издания является собственностью Воронежского государственного университета инженерных технологий, его репродуцирование (воспроизведение)
любым способом без согласия университета запрещается.
2
ОГЛАВЛЕНИЕ
Предисловие.………………………………………………..
1. Понятие системы управления……………………...…
2. Исторические предпосылки создания современных
систем управления…...………………………………...
3. Базовые понятия и определения..….…………………..
4. Структурная схема АСР……...………………………...
5. Понятие и виды обратной связи…...…………………..
6. Основные принципы управления………...…………....
6
8
10
14
17
19
21
6.1. Разомкнутое управление…..……………………............. 21
6.2. Принцип управления по возмущению…...….………..... 22
6.3. Принцип управления по отклонению……………..….... 24
6.4. Комбинированное управление…………………….……. 26
7. Классификация систем автоматического управления.. 28
8. Математическое описание элементов и систем
управления……...………………………………………. 38
8.1. Понятие математической модели…...……….…………. 38
8.2. Основные способы математического описания
систем автоматического управления………….……... 47
8.2.1. Статические характеристики………...…………………...
8.2.2. Динамические характеристики…………………………...
8.2.3. Частотные характеристики………………………………..
8.2.4. Дифференциальные уравнения…………………………...
8.2.5. Передаточные функции…………………………………...
47
49
54
57
64
8.3. Типовые звенья САР…...……….…………………….… 66
8.3.1. Усилительное звено…...……..…….……………………... 67
8.3.2. Интегрирующее звено…...…..…….……………………... 68
8.3.3. Дифференцирующее звено….…….……………………... 69
8.3.4. Апериодическое звено 1-го порядка…...………………... 70
8.3.5. Форсирующее звено..………..…….……………………... 71
8.3.6. Колебательное звено...…….....…….……………………... 71
3
8.3.7. Звено запаздывания....…….....…….……………………...
73
8.4. Соединения звеньев.…………….………………………. 74
8.4.1. Последовательное соединение…………………………... 74
8.4.2. Параллельное соединение……...….……………………... 75
8.4.3. Соединение с обратной связью...………………………... 76
9. Промышленные объекты управления………………… 79
9.1. Свойства объектов управления...…………………….…. 82
9.2. Математические модели объектов управления……..…. 84
9.2.1. Аналитический метод получения математического
описания объекта управления….………………………..
9.2.2. Экспериментальный метод получения передаточной
функции объекта управления по переходной кривой….
88
90
10. Основные законы регулирования……...……………… 95
10.1. Позиционные законы регулирования…………….……. 96
10.2. Пропорциональное регулирование……………….……. 98
10.3. Интегральное регулирование………….………....….…. 99
10.4. Дифференциальное регулирование……...………….…. 100
10.5. Изодромное регулирование (ПИ-закон). Регулирование
с использованием Д-закона……...……………………...
11. Алгоритмы цифровых систем управления……....……
12. Определение оптимальных настроек регуляторов…...
13. Анализ систем управления…………………….….……
13.1. Устойчивость САУ…………......………………..….
13.1.1. Корневой критерий…...………………………………….
13.1.2. Алгебраические критерии устойчивости……………….
13.1.3. Частотные критерии устойчивости…….....…………….
13.2. Качество АСУ………………......……..…………….
13.2.1. Прямые показатели качества…...……………………….
13.2.2. Косвенные показатели качества…......………………….
13.2.3. Робастность…...……………….……...………………….
4
101
103
105
109
110
114
115
117
122
123
125
130
14. Основные понятия об измерениях и средствах
измерения. Погрешность измерений…………………..
15. Государственная система приборов…...………………
16. Первичные преобразователи……...……………………
17. Методы и приборы измерения основных физических
величин химико-технологических процессов…...……
17.1. Методы и приборы измерения температуры…...…….
17.1.1. Температурные шкалы…...……..……………………….
17.1.2. Классификация термометров…...……………………….
17.1.3. Термометры расширения…..…...……………………….
17.1.4. Манометрические термометры …………………………
17.1.5. Термометры сопротивления…..……………………...…
17.1.6. Термоэлектрические термометры…….……………...…
17.1.7. Пирометрические термометры…….…….…………...…
17.1.8. Диэлектрические измерители температур…………...…
132
141
146
150
150
151
155
155
160
162
173
185
193
17.2. Методы и приборы измерения давления и
разряжения……………………………………..…… 194
17.2.1. Жидкостные манометры………..……………………….
17.2.2. Деформационные манометры……..…………………….
17.2.3. Поршневые манометры……......…..…………………….
17.2.4. Электрические манометры………...…………………….
197
201
205
207
Вопросы для самоконтроля..……………………………….. 214
Приложение…..……………………………………………... 217
Библиографический список………………………………... 218
5
ПРЕДИСЛОВИЕ
Учебное пособие разработано с целью оказания помощи студентам очной и заочной форм обучения при изучении дисциплины «Автоматизация технологических процессов и производств».
Изучение данной дисциплины направлено на формирование
следующих компетенций:
- готовности применять способы рационального использования
сырьевых, энергетических и других видов ресурсов, современные методы разработки малоотходных, энергосберегающих и экологически
чистых технологий (ПК-5);
- способности участвовать в разработке обобщенных вариантов
решения проблем, связанных с автоматизацией производства, выбирать на основе анализа вариантов оптимальный, прогнозировать последствия решений (ПК-7);
- способности участвовать в разработке проектов по автоматизации производственных и технологических процессов, технических
средств и систем автоматизации, контроля, диагностики, испытаний,
управления процессами, жизненным циклом продукции и ее качеством (ПК-19);
- способности к практическому освоению и совершенствованию
систем автоматизации производственных и технологических процессов,
контроля, диагностики, испытаний, управления процессами, жизненным
циклом продукции и ее качеством (ПК-20);
- способности выполнять работы по автоматизации технологических процессов и производства, их обеспечению средствами автоматизации и управления, использовать современные методы и средства автоматизации, контроля, диагностики, испытаний и управления процессами ( ПК-21).
В учебном пособии изложены теоретические основы построения современных систем управления, базовые методы и средства измерения наиболее распространенных технологических параметров,
используемых в пищевой и химической промышленности, даны основные аспекты создания и эксплуатации современных АСУ ТП,
опирающиеся на современные государственные стандарты, требова6
ния к проектированию автоматизированных систем управления технологическими процессами.
Пособие написано с использованием ряда сведений из курсов:
«Математика» (аналитические и численные методы решения дифференциальных уравнений), «Теория управления» (структурные преобразования, критерии управления, устойчивость, качество), «Математическое
моделирование в расчетах на ЭВМ» (методы обработки результатов
эксперимента), «Моделирование систем» (модели технологических
процессов), «Технологические процессы и производства» (динамические характеристики процессов, способы их получения и анализ) и др.
дисциплин. Материал иллюстрируется необходимыми поясняющими
схемами с подробным описанием принципа действия технических устройств. Приведены примеры создания функциональных схем автоматизированных систем управления.
Предложенное учебное пособие содержит необходимый теоретический и справочный материал для самостоятельной творческой
работы студентов над изучением методов измерения, управления,
проектирования и эксплуатации современных систем автоматического управления технологическими процессами.
7
1. ПОНЯТИЕ СИСТЕМЫ УПРАВЛЕНИЯ
Понятие элемент происходит от латинского слова
«elementarius» и означает: начальный, простой, простейший, конечный, неделимый, лежащий в основе чего-либо.
Совокупность (соединение) взаимосвязанных и взаимодействующих элементов, объединенных с определенной целью называется
системой.
Понятие система происходит от греческого слова «systema», означающего целое, составленное из отдельных частей.
Каждый элемент в системе при необходимости можно рассматривать в качестве самостоятельных систем. Элементы внутри системы связаны между собой, а через внешнюю среду и с другими системами, прямой и обратной связью.
Системы разделяются на простые и сложные. Разница между
ними заключается в том, что в состав сложной системы входят компоненты, которые сами являются системами. Их называют подсистемами. Каждый компонент подсистемы, в свою очередь, может быть
системой. Совокупность компонентов подсистемы называют микросистемой. Любая система может быть подсистемой другой системы,
которая по отношению к ней является надсистемой или макросистемой.
Системы значительно отличаются между собой как по составу,
так и по главным целям. Каждая система характеризуется целью,
структурой, входными и выходными параметрами, ограничениями,
законом функционирования и критерием управления.
Системой может считаться множество программ для решения
конкретных задач управления технологическим процессом с использованием специализированных управляющих вычислительных машин и ЭВМ.
В данном курсе понятие "система" используется применительно к набору технических средств и устройств, комплексу программных средств, необходимых для нормального функционирования и
протекания химико-технологических процессов в аппаратах.
8
Современные химико-технологические процессы характеризуются большим количеством технологических параметров, (число их
может достигать нескольких тысяч), которые необходимо контролировать, поддерживать постоянными или изменять по определенному
закону. Соблюдение регламента технологического процесса определяет качество и объем выпускаемой продукции.
Для обеспечения выполнения данного технологического процесса необходимо организовать тот или иной процесс управления.
Обычно под управлением понимается целенаправленное воздействие
на технологический аппарат с целью обеспечения выполнения его
требуемого режима работы.
Задача управления заключается в том, чтобы объект управления
в условиях реальной эксплуатации обеспечивал выполнение требуемых функций.
Процесс управления может быть реализован "ручным" способом или с помощью совокупности технических средств. В зависимости от способа управления различают системы ручного, автоматизированного и автоматического управления.
Система, в которой все операции управления химикотехнологическим процессом выполняет человек (оператор) называется ручной.
Система, в которой все операции управления химикотехнологическим процессом выполняют технические устройства без
непосредственного участия человека, называется автоматической.
Система, в которой часть операций управления химикотехнологическим процессом выполняют технические устройства, а
часть (наиболее ответственная) сохраняется за человеком, называется
автоматизированной (САУ).
В общем случае под системой управления понимается система,
обеспечивающая автоматизированный сбор, передачу, обработку,
хранение информации, выдачу управляющих воздействий, необходимых для оптимального управления и ведения заданным технологическим процессом.
Под оптимизацией управления понимается выбор управления,
при котором достигается минимальное или максимальное значение
некоторого критерия управления.
9
2. ИСТОРИЧЕСКИЕ ПРЕДПОСЫЛКИ СОЗДАНИЯ
СОВРЕМЕННЫХ СИСТЕМ УПРАВЛЕНИЯ
Идея создания устройств, которые бы работали без участия человека, возникла еще в глубокой древности. Однако широкого практического значения первые автоматические устройства наших предков не имели. Их использовали исключительно для развлекательных
или религиозных целей. Так, известно, что Архит Тарентский (VI-V
вв. до н. э.) изготовил механического «летающего голубя», а Дмитрий Фалерский (III в. до н. э.) - «ползающую улитку», но эти изобретения так и остались занимательными игрушками.
В Древней Греции появилось слово аутоматос (самодействующий), от которого произошло название области науки и техники об
автоматических (самодействующих) устройствах — автоматика.
Древнегреческий математик и механик Герон Александрийский
(I в. до н. э.) оставил описание устройства, которое использовали
жрецы для «чуда», автоматического распахивания дверей храма.
Другой древнегреческий математик и механик Архимед (287 г.
до н. э. - 212 г. до н. э.) изобрел полиспаст (систему блоков для поднятия крупнотоннажных грузов), оборонительные и метательные
машины и др.
В древности автоматы придумывали изобретатели-одиночки, и,
как правило, в единственных экземплярах. Причем в основном построение устройств основывалось не на строгой теоретической базе, а
на методе проб и ошибок, а также на интуитивных догадках автора.
Автоматы тогда носило характер скорее произведения искусства, нежели практически применимой вещи. При этом авторы не раскрывали всех секретов построения данных машин.
Особый след в истории развития технических устройств оставил итальянский художник и изобретатель Леонардо ди сер Пьеро да
Винчи (1452-1519). Леонардо да Винчи вел дневник, в котором приведено множество чертежей и рисунков придуманных им механизмов
и аппаратов. Сконструировав по чертежам «машины» Леонардо да
Винчи, исследователи доказали, что именно ему принадлежат «авторские права» на парашют, вертолет, акваланг, пулемет, автомобиль
и массу других механизмов, без которых невозможно представить
10
современную цивилизацию. Он известен как конструктор ткацких
станков, печатных, деревообрабатывающих и землеройных машин,
приборов для шлифовки стекла.
С необходимостью построения управляющих устройств первыми столкнулись создатели высокоточных механизмов, в первую
очередь, часов. Даже очень небольшие, но действующие непрерывно,
помехи, накапливаясь, приводили, в конечном итоге, к отклонениям
от нормального хода, недопустимым по условиям точности. Противодействовать им чисто конструктивными методами, например,
улучшая точность и чистоту обработки деталей, повышая их массу
или увеличивая полезные усилия, не всегда удавалось. И для повышения точности, в состав часов стали вводить регуляторы. Первое
автоматическое устройство практического назначения было изобретено Гюйгенсом в 1657 году автоматический регулятор маятникового
типа для стабилизации скорости хода часового механизма.
Другой причиной, побудившей строить регуляторы, была необходимость управлять процессами, подверженными столь сильным
помехам, что при этом утрачивалась не только точность, но зачастую
и работоспособность системы вообще. Предшественниками регуляторов для таких условий можно считать применявшиеся еще в средних веках центробежные маятниковые уравнители скорости хода водяных мукомольных мельниц.
Первые автоматические устройства промышленного назначения появились в связи с изобретением и развитием паровых машин и
турбин в 18 и 19 веках в эпоху промышленного переворота в Европе.
Первым автоматическим регулятором такого типа является поплавковый регулятор питания парового котла, разработанный знаменитым русским механиком и изобретателем Н.И. Ползуновым в 1765 году.
Он был применен на барнаульском механическом заводе для поддержания заданного уровня воды в паровом котле паровой поршневой машины.
В 1784 году английский механик Джеймс Уатт получил патент
на центробежный регулятор скорости паровой машины, используемый для поддержания постоянства частоты вращения.
11
К первым промышленным регуляторам относят также первое
программное устройство управления ткацким станком от перфокарты, построенное в 1808 году Жаккаром. Оно применялось для воспроизведения узоров на коврах.
Паровая машина не случайно стала первым объектом для применения техники и теории управления, т. к. она не обладала способностью работать сама по себе, не имела “самовыравнивания”. Ее неблагоприятные динамические свойства часто приводили к тому, что
подключенный к ней регулятор действовал не так, как ожидал конструктор, “раскачивал” машину или вообще оказывался неспособным
управлять ею. Все это, естественно, побуждало к проведению теоретических исследований.
Три фундаментальные работы внесли коренное изменение в
подходе к проблеме и в методологии исследований и содержали, по
существу, изложение начал новой науки об управлении.
Это работы Дж. Максвелла “О регуляторах” (1866) и Вышнеградского “Об общей теории регуляторов” (1876) и “О регуляторах
прямого действия” (1877).
Максвелл и Вышнеградский впервые рассмотрели паровую
машину и регулятор как единую динамическую систему, что позволило разработать методику исследования самых разнообразных по
принципам действия и конструкции систем, заложить основы теории
устойчивости и установить ряд важных общих закономерностей регулирования (по принципу обратной связи).
В 1892 году А.М. Ляпунов опубликовал работу “Общая задача устойчивости движения”, в которой доказал возможность решения вопросов устойчивости регулирования.
Большой вклад в развитие теории автоматических систем
управления внесли работы О. Хейвисайда, Х. Боде, Х. Хазе,
Х. Найквиста, русских ученых К.Э. Циолковского, Н.И. Жуковского,
И.Н. Вознесенским, А.Н. Колмогоровым, А.В. Михайловым, В.Н.
Петровым, Л.С. Понтрягиным, А.А. Фельдбаумом, В.В. Солодовниковым и многими другими.
Эти работы открыли путь потоку технических изобретений
принципов регулирования и регуляторов, продолжавшихся до середины 20-го века.
12
Со второй половины прошлого века в связи с появлением и
бурным развитием достаточно дешёвых, надёжных и быстродействующих электронных вычислительных машин (ЭВМ) в мире начали
создаваться первые автоматизированные системы управления (АСУ)
химико-технологическими процессами.
АСУ построены на базе управляющих вычислительных комплексов (УВК), представляющих собой специализированную промышленную ЭВМ, предназначенную для вычислений и реализации
функций автоматизированных систем управления. Именно разнообразие этих функций позволило поднять автоматизацию на качественно новый уровень. Современные автоматизированные системы
управления развиваются в двух основных направлениях: автоматизированные системы управления технологическими процессами (АСУ
ТП) и автоматизированные системы управления производственными
процессами (АСУП).
До АСУ ТП имели место так называемые “локальные” системы
автоматического регулирования (САР), в которых за функционирование отдельно взятого контура регулирования определённого технологического параметра отвечал свой автоматический регулятор
(лат.: “локальный”- местный, ограниченный по месту).
Согласованная работа контуров, число которых в технологическом процессе может быть большим, проводилась оперативным персоналом.
В АСУ ТП насчитываются десятки – тысячи отдельных локальных контуров регулирования, согласование которых также проводит оперативный персонал, но при использовании управляющего
вычислительного комплекса. Таким образом, локальные САР входят
в АСУ ТП, как составная часть.
Автоматизированные системы управления производственными
процессами выполняет функции: маркетинга, календарного планирования, поставок сырья, сбыта готовой продукции, финансирования и
т. д. Объектом управления для АСУТП является трудовой процесс
непосредственного производства товарной продукции и вся административно-хозяйственная деятельность предприятия, неизбежно сопровождающая основной процесс производства продукции.
13
В настоящее время созданы принципиально новые системы
управления – интеллектуальные АСУ, использующие принципы и
методы искусственного интеллекта.
3. БАЗОВЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Технологический процесс (ТП) – это совокупность технологических операций, проводимых над исходным сырьем в одном или нескольких аппаратах, целью которых является получение продукта
обладающего заданными свойствами.
Физические величины, определяющие ход технологического
процесса, называются параметрами технологического процесса. Например, параметрами ТП могут быть: температура, давление, расход,
напряжение и т. д.
Значение параметра ТП, полученное в определенный момент
времени на основании данных некоторого измерительного прибора
называется измеренным значением.
Параметр технологического процесса, который необходимо поддерживать постоянным или изменять по определенному закону, называется регулируемым параметром или регулируемой величиной.
Управление - это процесс формирования и реализации управляющих воздействий, направленных на достижение некоторой цели.
Основу любой системы управления составляет объект управления.
Объект управления (объект регулирования, ОУ) – это аппарат,
система аппаратов, машина или другое устройство, в котором
одна или несколько химико-технологических величин, характеризующих его состояние поддерживается на заданном уровне или изменяется по определенному закону специально организованными
управляющими воздействиями извне.
Примером ОУ являются реактор, ректификационная колонна,
теплообменник, емкость, трубопровод, насос и т. д.
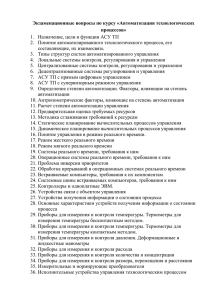
Цель процесса управления заключается в том, чтобы объект
управления в условиях реальной эксплуатации обеспечивал выполнение требуемых функций (рис. 1).
14
Рис. 1. Процесс управления
Цель управления формируется вне системы управления и является выходным сигналом. Для одного и того же ОУ цель управления
может формулироваться по-разному и изменяться во времени. Например, для аппарата смешения целью может быть как время процесса смешения, так и качество конечного продукта смешения.
Состояние объекта управления определяется одним или несколькими рабочими параметрами называемые выходными параметрами (выходом) объекта - y(t). Чаще всего выходные параметры
представляют собой физические величины: температура, давление,
напряжение электрического тока, линейные и угловые перемещения
и т.д.
Величины, характеризующие внешнее влияние на объект, называются воздействиями или входными сигналами (входом).
Воздействия на объект, вырабатываемые управляющим устройством, называют управляющими воздействиями - u(t). Для возможности реализации этих управляющих воздействий всякий объект снабжается специально предусмотренными для этой цели управляющими
органами.
Внешнее воздействие, определяющее требуемый закон изменения управляемой величины, называется задающим воздействием (заданием) - x(t).
Воздействия на объект, не зависящие от системы управления
называются возмущающими воздействиями (возмущениями) - f(t).
Они могут быть внешними (температура окружающей среды, помехи наводимые электромагнитными полями, нагрузка на выходе и др.)
и внутренними (активность катализатора).
15
Эти воздействия вызывают изменение внутреннего состояния
объекта и как следствие - рабочих параметров. В связи с этим для
выполнения рабочих функций y(t)=(y1, y2 …ym) по заданным алгоритмам x(t)=(x1, x2 …xn) необходимо на объект управления так организовать подачу управляющих воздействий u(t)=(u1, u2 …fd), чтобы обеспечить компенсацию возмущающих возмущений (t)=(f1, f2 …fk) и
y(t)= x(t) (рис 2). Переменные, характеризующие состояние объекта
управления, называются переменными состояния z(t)=(z1, z2 …zs).
Объект
управления
z(t)=(z1, z2 …zs)
y(t)=(y1, y2 …ym)
x(t)=(x1, x2 …xn)
f(t)=(f1, f2 …fk)
u(t)=(u1, u2 …fd)
Рис 2. Воздействия на объект управления
Если объект управления характеризуется только одной управляемой величиной y(t), то он называется одномерным (рис. 3, а). Если параметров объекта y(t) и x(t) несколько, то он называется многомерным (рис. 3, б).
16
Рис. 3. Типы объектов управления: а – одномерный, б - многомерный
Совокупность объекта управления и управляющего устройства
(УУ) называется системой управления(СУ):
СУ=ОУ+УУ.
Частный вид управления, когда задачей является обеспечение
постоянства какой-либо выходной величины ОУ, называется регулированием:
y(t)= const.
Техническое устройство, обеспечивающее автоматическое поддержание заданного значения выходной величины объекта управления y(t) или изменения ее по определенному закону называется автоматическим регулятором (АР).
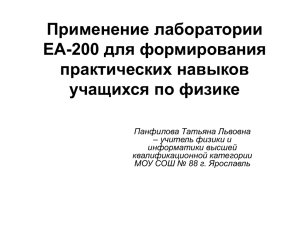
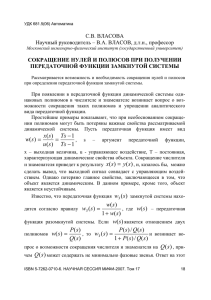
4. СТРУКТУРНАЯ СХЕМА АСР
Структурная схема типовой одноконтурной автоматической
системы регулирования (АСР) показана на рис. 4.
Как правило, все входные и выходные переменные систем
управления являются функциями времен, поэтому в дальнейшем в
обозначениях переменная t опускается.
17
х
ЭС
уос
e
f
УУ
АР
uАР
ИМ
НП
uим
РО
uро
ОУ
y
ПИП
ЭОС
Рис. 4. Структурная схема АСУ
Принятые обозначения на рис. 4:
ОУ – объект управления;
f - возмущение внешней среды на систему;
y – выходное воздействие, выдаваемое (ОУ);
ПИП - первичный измерительный прибор;
НП - нормирующий преобразователь;
ЭОС – элемент обратной связи (датчик и нормирующий преобразователь), устройство для измерения текущего значения выходной
величины - у и преобразования его в сигнал - уос удобный для передачи;
х - задающее воздействие (задание);
ЭС – элемент сравнения,
АР – автоматический регулятор;
uАР - управляющее воздействие АР;
ИМ – исполнительный механизм;
uим – управляющее воздействие ИМ на РО;
РО – регулирующий орган;
uро – управляющее воздействие РО на поток вещества или энергии влияющих на выход объекта управления – у;
УУ - управляющее устройство (автоматический регулятор, исполнительный механизм и регулирующий орган).
Выходной параметр объекта управления - у измеряется первичным преобразователем (датчик), который преобразует измеренный
сигнал в форму удобную для дальнейшей обработки и преобразования.
Например,
термометр
сопротивления,
измеряя
температуру на выходе ОУ, преобразовывает её в изменение сопро18
тивления. Сигнал с датчика поступает на НП, который служит для
преобразования измерительного сигнала в унифицированный вид и
дистанционной передачи сигнала по каналу связи. Преобразованный
выходной сигнал - уос поступает на элемент сравнения. ЭС, устройство в котором сравнивается заданное значение входной величины - х с
текущим значением преобразованной выходной величины - уос и определяется ошибка регулирования e = х
- уос.. Рассогласование е
проступает на вход АР, который в зависимости от ошибки и заложенного алгоритма регулирования вырабатывает управляющее воздействие на исполнительное устройство, состоящее из исполнительного механизма и регулирующего органа. ИМ предназначен для преобразования, усиления мощности командного сигнала uАР, получаемого от регулятора в изменение положения регулирующего органа
(РО). Регулирующий орган воздействует на материальные или энергетические потоки, определяющие выходную величину - y ОУ, с целью поддержания её на заданном уровне y = x (e → 0) или изменения
по определенному закону.
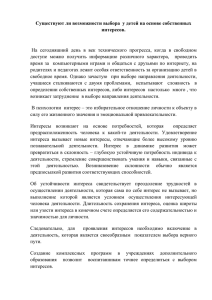
5. ПОНЯТИЕ И ВИДЫ ОБРАТНОЙ СВЯЗИ
Системы автоматического управления подразделяются на разомкнутые (рис. 5, а) и замкнутые (рис. 5, б), т. е. с обратной связью
(ОС). Цель ОС доставить информацию с выхода на вход системы с
помощью ЭОС.
f
f
x
УУ
u
а
ОУ
e
x
y
УУ
u
ОУ
y
yос
б
ЭОС
Рис. 5. Структурные схемы АСР: а - разомкнутая; б - замкнутая
Различают отрицательную (ООС) и положительную (ПОС) обратные связи. Отрицательная ОС – это когда информация или сигнал
19
поступает с выхода на вход со знаком минус, т. е. обратный сигнал
вычитается из прямого е(t)=х(t)-yос(t).
Положительная ОС – это когда обратный сигнал yос(t) суммируется с входным сигналом е(t)=g(t)+yос(t). ПОС применяется для усиления выходного сигнала.
Обозначение ООС на схемах представлено на рис. 6, а, б, ПОС
- на рис. 6, в.
g(t)
e(t)
–
y(t)
а
g(t)
e(t)
y(t)
g(t)
e(t)
+
y(t)
б
в
Рис. 6. Обозначение ОС:
а, б – отрицательная; в - положительная
Элемент сравнения
называется еще сумматором. Его выходной сигнал равен сумме входных сигналов. Зачерненный сектор
говорит о том, что данный входной сигнал надо брать с противоположным знаком.
Кроме этого, различают жесткие и гибкие ОС. Жесткая ОС –
это когда сигнал прошедший через элемент обратной связи yос(t) пропорционален выходному сигналу y(t) системы:
yос(t)=k·y(t),
где k – коэффициент пропорциональности.
Если k = 1, то такая обратная связь называется единичной
обратной связью и на структурных схемах АСР обозначается в виде
прямой линии соединяющей выход системы со входом (см. рис. 11).
Все другие зависимости носят название гибкой ОС:
yос(t)=yn(t); yос(t)=
d n y (t )
; yос(t)=k* ∫ dy (t ) и т. д.
dt n
6. ОСНОВНЫЕ ПРИНЦИПЫ УПРАВЛЕНИЯ
В основе построения различных систем управления лежат общие принципы управления, заключающиеся в формировании такого
закона изменения управляющего воздействия, при котором обеспе20
чивается заданный алгоритм при наличии различных возмущающих
воздействий.
В теории автоматического управления при проектировании СУ
используются три фундаментальных принципа управления:
− разомкнутое управление (принцип ручного управления);
− управление по возмущению (принцип компенсации);
− замкнутое управление (принцип обратной связи или управление по отклонению).
Еще есть комбинированный принцип, сочетающий в себе принципы управления по возмущению и отклонению одновременно.
6.1. Разомкнутое управление
Если свойства объекта управления и возмущения действующие
на него остаются постоянными, а к качеству управления не предъявляются повышенные требования, то можно использовать в системе
принцип управления по задающему воздействию без обратной связи
называемый разомкнутым управлением.
Структурная схема такого принципа управления представлена
на рис. 7.
f
х
u
УУ
ОУ
у
Рис. 7. Структурная схема разомкнутого управления
При разомкнутом принципе управляющее устройство УУ вырабатывает сигнал управления - u, который поступает на исполнительные элементы объекта управления ОУ. На вход управляющего устройства подается сигнал - х, представляющий собой задание. Задание
задается человеком (оператором) или специальным задающим уст21
ройством (программатором). Данный принцип отличается простотой
технической реализации, низкой стоимостью, но оказывается малоэффективным при недостаточной информации о характере возмущении.
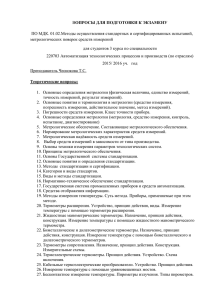
Пример схемы ручного регулирования приведен на рис. 8.
Шкаф
ТI
НЭ
SB
~U
Рис. 8. Схема ручного регулирования температуры сушильного шкафа
Человек-оператор в зависимости от показаний термометра ТI
включает или выключает нагревательный элемент НЭ с помощью
выключателя SB.
Принцип разомкнутого управления неприменим при управлении объектом, на который действуют заранее не известные возмущения, оказывающие существенное влияние на управляемую величину у. Он также неприменим, если ОУ является нейтральным или неустойчивым и система управления должна функционировать достаточно длительное время.
6.2. Принцип управления по возмущению
Способ управления, при котором управляющее воздействие
вырабатывается на основе действующих возмущений, называется
способом управления по возмущению или принципом компенсации.
Принцип компенсации иногда также называют принципом Понселе (по имени французского инженера Ж. Понселе (Ponselet), пред22
ложившего принцип регулирования паровой машины по моменту сопротивления на ее валу, т. е. по возмущению).
Если известны все возмущающие факторы и их характер воздействия на ОУ, то можно сформировать так управляющее воздействие, что оно будет компенсировать измеренное возмущение (рис. 9).
Здесь управляющее устройство УУ вырабатывает сигнал
управления - u`, в соответствии с заданием - x. Одновременно производится измерение (И) возмущений - f, действующих на объект ОУ, и
производится коррекция (К) сигнала управления - u. Полученный в
результате коррекции сигнал управления - u поступает на объект
управления.
И
x
u`
УУ
K
f
u
y
ОУ
Рис. 9. Структурная схема управления по возмущению
Данный принцип является более эффективным по сравнению с
разомкнутым управлением, при условии, что имеется техническая
возможность измерения возмущающих воздействий. Указанное условие ограничивает применение данного принципа.
Пример управления по возмущению представлен на рис. 10.
пар
Т
сырье
FE
FС
u1
Рис. 10. Управление температурой сырья
23
Температура сырья на выходе из теплообменника Т определяется подачей греющего пара, количество которого зависит от расхода
сырья (возмущающего фактора) замеряемого датчиком расхода FE.
Информация с датчика расхода поступает на регулятор FC, который
выдает управляющее воздействие на исполнительное устройство в
зависимости от расхода сырья. При этом способе управления, температура сырья, поступающая в теплообменник должна быть постоянной.
Качество управления этого принципа значительно выше чем
разомкнутого, т.к. воздействия возмущения компенсируются, но сама
система оказывается дороже из-за затрат на измерение возмущения.
Кроме того, к достоинствам данного принципа можно также отнести:
− полную инвариантность к определенным возмущениям;
− отсутствие проблемы устойчивости системы, т. к. нет ОС.
Недостатками принципа компенсации являются:
− большое количество возмущений требует соответствующего
количества компенсационных каналов, что усложняет систему и повышает её стоимость, одновременно снижая надежность;
− коррекция параметров управления регулируемого объекта
приводит к появлению ошибок в управлении;
− возможность применения только к тем объектам, чьи характеристики однозначно известны и можно учесть все возмущающие
факторы действующие на ОУ, что в реальных объектах сделать крайне сложно.
6.3. Принцип управления по отклонению
Управлением по отклонении называется такой способ управления, при котором определяется отклонение текущего значения выходной переменной от требуемого значения и на его основе формируется управляющее воздействие.
Системы управления, основанные на способе управления по отклонению, непременно содержат обратную связь - канал связи, по которому информация об управляемой переменной поступает на управляющее устройство. Поэтому способ управления по отклонению называют также принципом обратной связи.
24
Первыми промышленными регуляторами, построенными по
принципу обратной связи, являются регулятор уровня котла паровой
машины Ползунова (1765) и регулятор угловой скорости паровой
машины Уатта (1784). Поэтому принцип обратной связи иногда называют принципом Ползунова - Уатта.
Принцип замкнутого управления позволяет решить задачу
управления при любом характере действующих возмущений. Подавляющее большинство технических систем управления построено
именно по этому принципу. Он также присущ живым организмам и
обществу. Так, например, установлено, что, когда человек берет какой-либо предмет, управление кистью его руки производится по
принципу обратной связи (рис. 11).
f
х
e
УУ
u
ОУ
у
Рис. 11. Структурная схема управления по отклонению
Сигнал задания - х поступает на один из входов элемента сравнения, на другой вход которого по цепи обратной связи подается измеренное с помощью датчиков фактическое значение рабочего параметра объекта управления - у. На выходе элемента сравнения имеем
сигнал - е (ошибку, отклонение), который является разностью между
заданным и фактическим значениями параметров. Управляющее устройство УУ в зависимости от величины и знака ошибки вырабатывает сигнал управления - u. Таким образом, принцип замкнутого управления учитывает не только задание, но и фактическое состояние объекта и действующих возмущений. Алгоритм работы такой системы
управления заключен в стремлении свести ошибку к нулю.
Данный принцип является наиболее универсальным и позволяет успешно решать задачи управления, несмотря на неопределенность объекта управления и характера возмущений.
Пример использования данного принципа управления по ошибке представлен на рис. 12.
25
пар
Т
молоко
ТЕ
ТC
Рис. 12. Система поддержания заданной температуры в теплообменнике
Температура выходного параметра сырья в теплообменнике Т
замеряется с помощью датчика температуры ТЕ и поступает на регулятор ТС, где происходит сравнение выходной температуры сырья с
заданным значение. В случае расхождения температур, регулятор
выдает команду на исполнительное устройство для уменьшение или
увеличение подачи пара в теплообменник.
К недостаткам данного принципа управления можно отнести:
− возникновение в системах с ОС проблемы устойчивости;
− невозможность добиться в системах абсолютной инвариантности к возмущениям. Стремление частичной инвариантности приводит к усложнению системы и ухудшению устойчивости.
6.4. Комбинированное управление
Принцип комбинированного управления используется в тех
случаях, когда на систему действует много различных возмущений,
один (или несколько) из которых оказывает наибольшее влияние на
работу системы управления и может быть измерен. В подобных случаях влияние превалирующего возмущения можно нейтрализовать,
используя принцип компенсации, и нейтрализовать влияние остальных возмущений, используя принцип обратной связи.
26
Комбинированное управление заключено в сочетании двух
принципов управления по отклонению и внешнему возмущению
(рис. 13), т. е. сигнал управления на объект формируется двумя каналами. Первый канал чувствителен к отклонению регулируемой величины от задания. Второй формирует управляющее воздействие непосредственно из задающего или возмущающего сигнала.
К
х
e
УУ
u`
И
u
ОУ
f
у
Рис. 13. Структурная схема комбинированного управления
Данный способ достигает высокого качества управления, однако его применение тоже имеет ограничение в использовании, так как
возмущающее воздействие f не всегда можно измерить.
Достоинства этого метода:
− наличие отрицательной ОС делает систему менее чувствительной к изменению параметров регулируемого объекта;
− добавление канала, чувствительного к заданию или к возмущению, не влияет на устойчивость контура ОС.
Примером такого способа управления может считаться системы
регулирования температуры в теплообменнике с коррекцией по расходу сырья (рис. 14).
27
пар
Т
молоко
FE
FC
TE
TC
Рис. 14. Система поддержания заданной температуры
пастеризации молока с коррекцией по расходу сырья
Расход сырья на входе в теплообменник Т является здесь возмущающим воздействием, влияющим на температуру на выходе из
объекта управления. В зависимости от величины расхода сырья, который измеряется расходомером FE, регулятор расхода FС корректирует управляющее воздействие регулятора температуры ТС и обеспечивает необходимую подачу теплоносителя с учетом возмущения.
7. КЛАССИФИКАЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО
УПРАВЛЕНИЯ
Классификация САУ по принципу управления, рассмотренная
выше, не является единственной. Существует множество различных
признаков, которые можно положить в основу классификации САУ, в
зависимости от решения класса задач поставленных перед ней.
Условно все САУ, используемые для управления химикотехнологическими процессами, можно классифицировать по следующим часто используемым признакам.
1. По алгоритму функционирования (по цели управления, назначению, характеру изменения задающего воздействия).
a) Системы стабилизации. Система, алгоритм функционирования которой содержит предписание поддерживать регулируемую
28
величину на постоянном значении (у(t) = const). В этих системах задающее воздействие x(t) постоянно. Примером такой системы является система поддержания постоянного расхода среды в трубопроводе, уровня в емкости и т.д.
b) Системы программного управления. Система, алгоритм
функционирования которой содержит предписание изменять регулируемую величину в соответствии с заранее заданной функцией времени (у(t) изменяется программно). В таких системах задающее воздействие x(t) является заранее известной (детерминированной) функцией времени. Примером такого класса систем является система освещения помещения по программе заложенной в таймер.
c) Системы слежения. Система, алгоритм функционирования
которой содержит предписание изменять регулируемую величину у(t)
в зависимости от заранее неизвестной величины на входе x(t) = var.
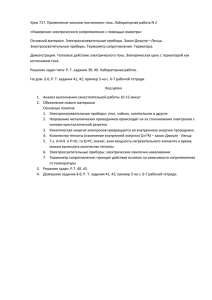
Следящие системы представляют собой замкнутые системы, реализующие принцип управления по отклонению. Примером такой системы является система управления смешением двух расходов (рис.
15). В зависимости от изменения расхода 1 компонента F1 расход 2
компонента F2 должен подаваться в таком количестве в смеситель,
чтобы выполнялось заданное соотношение расходов F1 : F2 = 1:3.
F1
FE
M
F2
FC
F1: F2 = 1:3
Рис. 15. Система слежения
d) Системы оптимального управления. Система алгоритм
функционирования которой содержит предписание изменять регули29
руемую величину чтобы обеспечить минимум или максимум какогото критерия качества. Например система которая переводит объект из
начального положения в конечное при минимально возможных энергетических затратах, будет оптимальной по расходу энергии на
управление.
e) Системы телеуправления. Система, алгоритм функционирования которой содержит предписание изменять регулируемую величину в зависимости от видеосигнала. Управление осуществляется
на основе анализа видеоинформации об объекте. Примером такой
системы является система управления обработкой изделий движущихся по транспортеру Т (рис. 16). Информация с датчик сигнала ДС
о положении изделия на транспортере поступает в систему управления последующей обработки, которая сравнивает поступившую информацию с хранимой в памяти и при совпадении дает команду на
проведение необходимых технологических операций.
Кроме вышеперечисленных систем, существуют системы сопровождения, компенсационных измерений, автопилотирования и
др., которые в управлении химико-технологическими процессами
практически не используются и поэтому здесь не рассматриваются.
СУ
ДС
Т
Рис. 16. Система телеуправления
2. По количеству контуров:
a) одноконтурные (замкнутая система управления с одним регулируемым параметром, одной обратной связью (с одним контуром
управления));
b) многоконтурные (замкнутая система управления с несколькими контурами управления).
30
3. По числу управляемых величин:
a) одномерные (системы с одной управляемой величиной);
b) многомерные (системы с несколькими управляемыми величинами).
Многомерные АСУ, в свою очередь, подразделяются на системы:
- несвязанного управления. Системы, в которых регуляторы
непосредственно не связаны между собой и могут взаимодействовать
только через общий для них объект управления. Системы несвязанного управления делятся:
- на зависимые (системы, в которых процессы управления параметрами объекта нельзя рассматривать изолированно друг
от друга, поскольку на изменение одной из управляемых величин
влияют изменения других);
- независимые (системы, в которых процессы
управления параметрами объекта можно рассматривать изолированно друг
от друга);
- связанного управления. Системы, в которых регуляторы различных параметров одного и того же технологического процесса связаны между собой вне объекта регулирования. Это многоконтурные
САУ.
4. По характеру используемых для управления сигналов.
В зависимости от прохождения и характера сигнала в системе
управления они делятся:
a) на аналоговые (непрерывные). В аналоговой системе формирование и прохождение сигнала осуществляется непрерывно во
времени;
b) дискретные (прерывистые). Система, в которой, по крайней
мере, между двумя непрерывными её элементами формирования сигнала производится не непрерывно, а прерывисто, относится к классу
дискретных систем. Системы дискретного управления в свою очередь делятся:
- на импульсные. Система содержит импульсный элемент преобразующий непрерывный сигнал в последовательность импульсов.
В импульсном элементе происходит модуляция, т.е. в соответствии с
входным сигналом изменяется один из параметров последовательно31
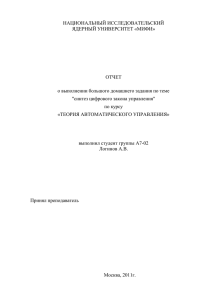
сти импульсов на выходе. В зависимости от того, какой параметр импульса изменяется, различают: амплитудно-импульсную модуляцию
(АИМ); широтно-импульсную модуляцию (ШИМ); частотноимпульсную модуляцию (ЧИМ); фазоимпульсную модуляцию (ФИМ).
При АИМ изменяется амплитуда - Аи, при ШИМ — ширина (длительность) импульса - τи, при ЧИМ - частота следования - Т, а при
ФИМ - изменяется фаза импульсов, т.е. временное положение относительно тактовых точек (рис. 17);
- цифровые. Система управления называется цифровой, если
она содержит цифровое устройство;
- релейные. Релейные системы содержат реле или элементы,
имеющие релейную характеристику, которая принимает два возможных значения: минимальное (разомкнуто) и максимальное
(замкнуто).
Рис. 17. Виды модуляции импульсного сигнала
5. По характеру математических соотношений описывающих систему.
В зависимости от того, какие в основе математической модели,
описывающей систему управления, лежат уравнения, САУ делятся:
a) на линейные (описываются линейными уравнения, для которых справедлив принцип суперпозиции);
32
b) нелинейные (описываются нелинейными уравнениями).
Принцип суперпозиции (наложения) заключается в том, что если на вход объекта управления (рис. 18) подается несколько входных
воздействий хi, то реакция объекта на сумму входных воздействий
равна сумме реакций объекта на каждое воздействие в отдельности:
Λ(х1 + х2) = Λ(х1) + Λ(х2),
где Λ - линейная функция (интегрирование, дифференцирование
и т. д.).
Рис. 18. Объект с несколькими входными воздействиями
Практически
все
системы
управления
химикотехнологическими процессами не линейны, и получение их точного
математического описания представляет значительные трудности.
Линейные и нелинейные системы могут быть непрерывными,
дискретными и дискретно-непрерывными. Непрерывные системы
описываются дифференциальными уравнениями, дискретные описываются дифференциально-разностными, а дискретно-непрерывные
обоими видами уравнений.
6. По виду используемой энергии.
В зависимости от того, используются или не используются дополнительные источники энергии для перемещения регулирующего
органа, системы автоматического регулирования делятся на системы:
a) прямого действия. Регулирующий орган перемещается непосредственно чувствительным элементом. Дополнительный источник энергии в системе управления отсутствует. Энергия для перемещения РО поступает непосредственно из объекта управления через
первичный измерительный преобразователь. Примером такой системы является регулятор уровня воды в паровом котле, построенный
И. И. Ползуновым;
33
b) непрямого (косвенного) действия. Для перемещения регулирующего органа используют вспомогательные устройства, работающие от дополнительных (внешних) источников энергии.
В зависимости от источника дополнительной энергии системы
управления делятся:
- на электрические (постоянный или переменный ток);
- пневматические (давление сжатого воздуха);
- гидравлические (давление несжимаемой среды - масла);
- комбинированные.
7. По характеру изменения параметров системы:
a) стационарные (сосредоточенные и распределенные);
b) нестационарные (сосредоточенные и распределенные).
Если в период эксплуатации параметры системы являются неизменными, то система считается стационарной, в противном случае
- нестационарной. Кроме того, особо выделяются системы с распределенными параметрами, т.е. такие системы, которые содержат распределенные в пространстве элементы, например, длинные электрические линии и т. д.
8. По типу ошибки в статике САУ.
Под ошибкой e(t) системы управления понимается разность
между заданием - x(t) и выходом - y(t) в установившееся режиме системы: e(t) = x(t) - y(t). По виду зависимости установившейся ошибки
от внешнего воздействия системы делятся:
a)
на статические;
b)
астатические.
Система, в которой величина установившейся ошибки зависит
от величины возмущения при постоянном задании, называется статической по возмущению. Если установившаяся ошибка не зависит от
величины возмущения, то система является астатической 1-го порядка. Если установившаяся ошибка не зависит от первой производной
возмущающего воздействия (скорости), то система является астатической 2-го порядка. Кроме того, различают статизм и астатизм по
задающему воздействию. При этом возмущение считается постоянным и установившаяся ошибка рассматривается в зависимости от величины задающего воздействия.
34
9. По характеру внешних воздействий.
В зависимости от характера внешних воздействий (задающего и
возмущающего) различают следующие системы:
a) детерминированные;
b) стохастические.
В детерминированных САР внешние воздействия имеют вид
постоянных функций времени. В стохастических системах внешние
воздействия имеют вид случайных функций.
Рассмотренные разновидности и свойства систем управления
являются основными, но не исчерпывают всего многообразия САУ.
10. По способу использования текущей информации.
В зависимости от способа использования текущей информации
системы управления делятся:
a) на не адаптивные. Это обычные системы управления, в которых текущая информация используется только для выработки
управляющего воздействия при неизменном алгоритме управления;
b) адаптивные. Это системы в которой текущая информация,
помимо выработки управляющего воздействия, используется также
для изменения алгоритма управления. В свою очередь адаптивные
системы делятся:
- на робастые;
- экстремальные;
- самонастраивающиеся;
- самоорганизующиеся;
- обучающиеся.
Робастные системы - системы управления, обладающие свойством сохранять качество функционирования, в пределах предъявляемых к ней требований, при изменении ее параметров или структуры.
Робастная система управления должна так формировать закон
управления, который сохранял бы выходные переменные системы и
35
сигналы ошибки в заданных допустимых пределах, несмотря на наличие неопределённостей в объекте управления.
Два последних класса систем, обладающих способностью к
обучению и использованию человеко-машинного интерфейса в какой-то мере имитирует поведение человека, и поэтому часто называются интеллектуальными.
Изменение состояния системы можно производить за счет контролируемых изменений управляющих воздействий, параметров и
структуры системы. В экстремальных системах управления изменяются только управляющие воздействия для поддержания такого режима работы управляемого объекта, при котором достигается экстремальное (минимальное или максимальное) значение некоторого
критерия, характеризующего качество функционирования объекта.
Автоматическое устройство в этом случае, вырабатывающее управляющие воздействия на ОУ, называется экстремальным
регулятором.
Если структура алгоритма адаптивной системы не изменяется, а
изменяются только параметры алгоритма, то система называется самонастраивающейся. Если изменяется структура алгоритма системы, то
такая система называется самоорганизующейся.
В обучающихся системах управления изменяются и управляющие воздействия, параметры и структура системы, алгоритм функционирования, а в случае самообучения и целевая функция. К ним
относятся интеллектуальные и экспертные системы управления.
Адаптивные системы управления используются, когда с помощью обычных систем не удается справиться с поставленной задачей.
Обычно это происходит, когда начальной (априорной) информации
об объекте управления недостаточно или характеристика объекта в
процессе функционирования системы изменяется непредвиденным
образом в широких пределах.
Структурная схема адаптивной системы управления включает
объект, регулятор и адаптор (рис. 19).
36
х
ОУ
Рис. 19. Структура адаптивной системы управления
ОУ и регулятор Р, вырабатывающий управляющее воздействие
на объект, образуют основной контур. Регулятор содержит варьируемые параметры. Адаптор А на основе обработки доступной ему информации вырабатывает управляющее воздействие, производящее
подстройку варьируемых параметров регулятора. Регулятор совместно
с адаптором образуют адаптивный регулятор.
Адаптивная система управления имеет иерархическую структуру: она имеет минимум два уровня. Основной контур образует первый (низший) уровень, а контур, содержащий адаптор (контуром
адаптации) — второй уровень. Возможны три и больше уровней.
Адаптивная система управления называется поисковой, если в
нее для изучения объекта подаются специальные (поисковые) сигналы, и беспоисковой, если в систему никаких поисковых сигналов для
изучения объекта не подается. Среди поисковых систем широко распространены экстремальные системы. Отличительным признаком таких систем является наличие у статических характеристик их объектов управления явно выраженного экстремума. При этом положение
экстремума под влиянием различных факторов может меняться. Целью управления в экстремальных системах управления является подержание экстремума на их выходе. И для определения управляющих
воздействий, обеспечивающих движение к экстремуму, к управляющему сигналу добавляется поисковый сигнал.
Рассмотренные разновидности и свойства систем управления
являются основными, но не исчерпывают всего многообразия САУ.
37
8. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЭЛЕМЕНТОВ
И СИСТЕМ УПРАВЛЕНИЯ
8.1 Понятие математической модели
Проектируя систему управления химико-технологическим процессом, разработчик должен быть уверен, что в любой ситуации система будет действовать согласно предъявляемым требованиям, не
допуская возникновения или развития аварийных режимов. Поэтому
при проектировании и наладке система управления должна быть подвергнута всестороннему исследованию в различных режимах: нормальной эксплуатации, пусковых, останова оборудования, аварийных.
Самый достоверный способ проверки работоспособности системы управления – экспериментальные исследования на действующем оборудовании. Но это дорого и далеко не всегда возможно, особенно если речь идет о многовариантных исследованиях или исследованиях в аварийных режимах. Кроме того, такие данные необходимо иметь до ввода системы управления в эксплуатацию. В связи с
этим возникает необходимость проведения исследований на моделях
реальных объектов и систем управления.
Модель – это относительно упрощенный аналог реального объекта, созданный для изучения некоторых свойств оригинала.
Реальный объект бесконечно сложен в своих свойствах и проявлениях и недоступен для абсолютного познания. Поэтому при построении моделей сложных явлений принимают во внимание лишь
самое главное для цели исследования, отбрасывая множество несущественных деталей. В результате получается упрощенное, а потому
и пригодное для практического использования, представление реальности - модель.
По типу подобия различают физические и математические
модели.
Создаваемая модель может быть основана на физическом подобии процессов в модели и объекте оригинале. Например,
аналогом тепловых процессов в прямоточном котле могут служить процессы нагрева воды в одной трубе с наружным электрона38
гревателем. Применение физических моделей для химикотехнологических процессов затруднительно, так как объекты управления представляют собой в большинстве случаев сложные, многоагрегатных аппараты с разнообразными химическими и физическими
превращениями. Поэтому для отображения явлений в сложных системах применяют математические модели.
Математическая модель – это система математических соотношений (алгебраических, дифференциальных или интегральных
уравнений), отражающих физико-химические законы различных превращений в объекте.
Система уравнений связывает независимые (входные) и зависимые (выходные) величины объекта. Число таких уравнений должно
быть равно числу зависимых величин.
По способу получения математические модели делятся на расчетно-теоретические (аналитические), эмпирические и полуэмпирические.
В основе аналитических моделей лежат уравнения физико- химических законов (закона сохранения энергии, вещества, импульса и
т. д.). Коэффициенты этих уравнений включают в себя конструктивные и технологические параметры объекта и по этой причине аналитические модели наиболее полно раскрывают внутреннюю структуру
и сущность процессов в объекте, влияние отдельных параметров на
статические и динамические характеристики объекта.
Однако ряд коэффициентов уравнений аналитических моделей
может существенно отличаться от истинных в силу недостаточной
изученности или сложности их теоретического определения.
Пример.
Система регулирования температуры в теплообменнике TО представлена на рис. 20.
Жидкость с температурой T вытекает из теплообменника с некоторой скоростью и замещается жидкостью с температурой Ti , причем
Ti,< T. Температура жидкости в ТО повышается с помощью электрического нагревателя H. Смеситель С обеспечивает равномерное распределение
температуры по всему объему бака.
39
FTi
ТО
Н
E/E
FT
ТY
С
ТС
ТE
M
ТТ
Рис. 20. Система регулирования температуры в теплообменнике. ТЕ - датчик
температуры; ТТ- преобразователь для дистанционной передачи сигнала;
ТС - регулятор; TY - усилитель сигнала; М - двигатель мешалки; ТО - теплообменник; Н - нагреватель; С - смеситель
В соответствии с законом сохранения энергии, количество тепла, поступающего в бак с жидкостью, должно равняться количеству тепла, уходящему из бака, плюс количество тепла, накопленного жидкостью в баке:
qe + q i = ql + q o + q s ,
где qe - тепловой поток от электрического нагревателя; qi - тепловой поток
втекающей жидкости; ql - тепловой поток жидкости в баке; qo - тепловой поток вытекающей жидкости; qs - тепловой поток через стенки бака;
ql = С
dT
,
dt
где С - теплоемкость жидкости, являющаяся параметром системы.
Обозначая через V расход жидкости на входе и на выходе из бака
(считая их одинаковыми), через R сопротивление тепловому потоку через
поверхность бака, а через ТС температуру воздуха снаружи бака, через К удельную теплоемкость жидкости, мы можем записать
40
T − Tc
.
R
Подставляя выражения тепловых потоков в уравнение равновесия получаем:
qi = V ⋅ K ⋅ Ti , q o = V ⋅ K ⋅ To , q s =
T − Tc
dT
+ V ⋅ K ⋅T +
.
dt
R
Полученное уравнение является линейным дифференциальным уравнением первого порядка, в котором независимыми входными переменными
являются qe , Ti , Tс . Выходная величина нагревателя qe - это регулирующее
воздействие. Величины Ti и Tc называются возмущающими воздействиями
(это переменные, на которые мы никак не можем влиять и которые вызывают нежелаемую реакцию объекта). Обычно при синтезе системы управления
выдвигается требование минимизировать влияние внешних возмущений.
qe + V ⋅ K ⋅ Ti = С
Эмпирические модели являются результатом математической
обработки экспериментальных данных по идентификации объекта.
Получаемые в процессе идентификации статические и динамические
характеристики реального объекта, являясь внешним проявлением
многообразных внутренних процессов, не вскрывают этой внутренней сущности, а потому являются самыми общими и наименее информативными моделями, хотя и самыми точными. Недостатком таких моделей является также их высокая стоимость и возможность
получения только на действующем оборудовании.
Пример.
Часто возникает необходимость выразить в виде функциональной зависимости связь между входной - х и выходной - у величинами или изменением выходной величины у от времени t, которые заданы в виде набора
точек с координатами (х,у) или (у,t).
Задача сводится к нахождению кривую, которая с достаточной степенью точностью описывает экспериментальные точки (рис.21).
41
Рис. 21. Экспериментальные данные и расчетная кривая
Для нахождения такой кривой обычно пользуются методом наименьших квадратов (МНК), т.е. ищется такая зависимость, при которой обращается в минимум выражение
S=
N
∑(y
э
i
− yi ) 2 → min,
i =1
yiэ
где
- экспериментальные значения; yi - расчетные значения в точках ti ;
N- число точек эксперимента.
По виду расположения экспериментальных точек выбирается вид полинома аппроксимации, например для рис. 20 это будет квадратичная зависимость:
yi = C1 + C2ti + C3ti2
Задача в определении коэффициентов С1, С2, С3, при которых критерий МНК минимален:
N
S=
∑( y
э
i
− (C1 + C2 ti + C3ti2 )) 2 → min .
i =1
Известно, что в минимуме функции еѐ производные по всем переменным равны нулю:
∂S
∂S
∂S
= 0;
= 0;
= 0;
∂С1
∂С2
∂С3
Продифференцируем критерий S по всем переменным:
42
N
∂S
= −2 ⋅
( yiэ − C1 − C2 ti − C3t i2 ) = 0;
∂С1
i =1
N
N
∂S
=
−
2
⋅
t
⋅
( yiэ − C1 − C2ti − C3ti2 ) = 0 ;
i
∂
С
2
i =1
i =1
N
N
∂S = −2 ⋅
ti2 ⋅
( yiэ − C1 − C2 ti − C3ti2 ) = 0.
∂С3
i =1
i =1
∑
∑ ∑
∑ ∑
В упрощенном виде получим
N
N
N
ti ⋅ C2 +
ti2 ⋅ C3 =
yiэ ;
N ⋅ C1 +
i =1
i =1
i =1
N
N
N
N
ti2 ⋅ C2 +
ti3 ⋅ C3 =
( yiэ ⋅ ti );
ti ⋅ C1 +
i =1
i =1
i =1
i =1
N
N
N
N
3
4
t2 ⋅C +
t
⋅
C
+
t
⋅
C
=
( yiэ ⋅ ti2 );
i
1
i
2
i
3
i =1
i =1
i =1
i =1
Решив данную систему, находим искомые коэффициенты С1, С2, С3 и
подставляем их в уравнение регрессии, которое будет описывать экспериментальные точки.
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
∑
Полуэмпирические модели базируются на уравнениях аналитической модели, но некоторые еѐ коэффициенты получают из эксперимента, проводимого на реальном объекте. Такие модели более точны, но их получение сопряжено с дополнительными материальными
затратами.
Для определения степени соответствия (совпадения) свойств
полученной математической модели реальному объекту используется
понятие адекватности. Адекватность модели в какой-то мере условное понятие, так как полного соответствия модели реальному
объекту быть не может, иначе это была бы не модель, а сам объект.
Проверка соответствия модели реальной системе осуществляется по оценки адекватности модели. Оценка адекватности модели
реальному объекту оценивается по близости результатов расчетов
экспериментальным данным.
43
Существует два основных подхода к оценке адекватности.
1) По средним значениям откликов модели и системы.
Данный подход позволяет проверить значимость (качество)
уравнения регрессии определяющей модельную зависимость между
расчетными и экспериментальным данным. Проверка адекватности
уравнения регрессии (модели) осуществляется с помощью средней
ошибки аппроксимации, величина которой не должна превышать 1215 % (максимально допустимое значение), то есть проверяется гипотеза о близости средних значений каждой i-й компоненты откликов
модели - yi известным средним значениям i-й компоненты откликов
реальной системы (объекта) - yiэ :
э
1 n yi − yi
⋅ 100
n i =1
yi
2) По дисперсиям отклонений откликов модели от среднего
значения откликов систем.
Сравнение дисперсии проводят с помощью критерия F (критерия Фишера), критерия согласия (соответствия) - χ 2 (используется
при больших выборках, n>100), t-критерия Стьюдента (n<30), критерия Колмогорова - Смирнова, Кохрена и др.
Критерий Фишера позволяет провести оценку качества регрессионной модели в целом, путем сравнения дисперсий двух вариационных рядов и по параметрам. Согласно основной идее дисперсионного анализа общая сумма квадратов отклонений переменной - y от
среднего значения - y раскладывается на
две части: «объясненную» (факторную) и «необъясненную» (остаточную):
ε =
∑
∑ ( y − y ) = ∑ ( y€ − y) + ∑ ( y − y€)
2
2
2
.
Сопоставляя факторную и остаточную дисперсии в расчете на
одну степень свободы, получим величину Fфакт:
44
Fфакт =
2
Sфакт
2
Sост
=
∑ ( y€ − y )
∑ ( y − y€)
2
2
/m
/(n − m − 1)
.
Например, для парной линейной регрессии (у = f(x))
m = 1:
Fфакт
∑ ( y€ − y )
=
∑ ( y − y€)
когда
2
2
⋅ (n − 2) ⇒ сравнить с Fтабл ,
где n – число наблюдений; m – число параметров при переменной;
у, y€ , y - фактическое, расчетные и среднее значения переменой.
Рассчитанное фактическое значение критерия Фишера - Fфакт
сравнивается с табличным значением Fтабл.(α,k1,k2) при заданном
уровне значимости α и степенях свободы k1 = m и
k2 = n–m-1.
Fтабл. - это максимальное значение критерия под влиянием случайных
факторов при текущих степенях свободы и уровне значимости α.
Уровень значимости α характеризует вероятность не принять гипотезу при условии, что она верна. Как правило α принимается равной
0,05 или 0,01. Табличное значение Fтабл выбирается из специальных
таблиц по уровню значимости α, на пересечении столбцов k1 и k2.
Если фактическое значение F-критерия больше табличного
Fфакт > Fтабл, то признается статистическая значимость уравнения в
целом, т.е модель адекватна. Если Fфакт < Fтабл, то признается незначимость (неадекватность) модели, ненадежность уравнения регрессии.
При анализе адекватности модели исследуемому процессу с использованием критерия Фишера, возможны следующие варианты.
1. Построенная модель на основе F-критерия Фишера в целом
адекватна и все коэффициенты регрессии значимы. Такая модель
может быть использована для принятия решений и осуществления
прогнозов.
2. Модель по F-критерию Фишера адекватна, но часть коэффициентов не значима. Модель пригодна для принятия некоторых решений, но не для прогнозов.
45
3. Модель по F-критерию адекватна, но все коэффициенты регрессии не значимы. Модель полностью считается неадекватной. На
ее основе не принимаются решения и не осуществляются прогнозы.
Для характеристики качества уравнения регрессии (значимости
коэффициентов) используют коэффициент детерминации R2. В случае линейной зависимости R2 равен коэффициенту корреляции rxy2
между входной х и выходной у переменными:
R
2
∑ ( y€ − y)
=
∑ ( y − y€)
2
2
= rxy2 .
Коэффициент детерминации R2 показывает, какая часть дисперсии результативного признака - y объяснена уравнением регрессии.
Коэффициент детерминации R2 принимает значения в диапазоне от
нуля до единицы 0≤ R2 ≤1. Чем больше R2, тем лучше уравнение регрессии описывает исходные данные. При отсутствии зависимости
между у и x коэффициент детерминации R2 будет близок к нулю. Значение R2 является индикатором степени подгонки модели к данным
(при R2 близкое к 1.0 показывает, что модель объясняет почти всю
изменчивость соответствующих переменных).
Величина Fфакт связана с коэффициентом детерминации R2
2
(r xy), следующей формулой:
Fфакт =
rxy2
2
1 − rxy2
⋅ (n − 2).
Оценки статистической значимости коэффициентов регрессии и
коэффициента корреляции простой линейной регрессии (n<30) можно
проверить по t-критерию Стьюдента. При этом вычисляют расчетные
(фактические) значения t-критерия для параметров и сравнивают с tтабл,
которые определяют по таблице значений Стьюдента с учетом принятого уровня значимости α и числа степеней свободы вариации. На основании tрасч.>tтабл делают вывод об адекватности модели.
46
8.2. Основные способы математического описания
систем автоматического управления
Работу системы автоматического управления можно описать
словесно. Словесное описание помогает понять принцип действия
системы, ее назначение, особенности функционирования и т.д.
Однако, что самое главное, оно не дает количественных оценок качества регулирования, поэтому не пригодно для изучения характеристик систем и построения систем автоматизированного управления.
Поэтому в ТАУ используются более точные математические методы
описания свойств систем:
− статические характеристики;
− динамические характеристики;
− частотные характеристики;
− дифференциальные уравнения;
− передаточные функции.
8.2.1. Статические характеристики
Системы автоматического управления являются динамическими системами, поэтому их качество оценивается по поведению в двух
режимах работы: установившемся и неустановившемся (переходном).
Установившийся режим - это режим, при котором расхождение
между истинным значением регулируемой величины и ее заданным
значением будет постоянным во времени.
При поступлении на вход системы нового задания она должна
обеспечить с заданной степенью точности новое значение регулируемой величины в установившемся режиме.
Частным случаем установившегося режима является статический режим. Под статическим режимом системы (зависимость
выходной величины от возмущающих и управляющих воздействий) понимается такой режим, при котором все координаты, определяющие ее состояние, являются постоянными. Отсюда следу47
ет, что в статическом режиме производные по времени по всем координатам равны нулю.
Уравнение статического режима получается из соответствующего дифференциального уравнения при приравнивании к нулю всех
производных.
В статическом режиме система управления или её элемент описываются статическими характеристиками.
Статической характеристикой элемента (системы) называется
зависимость установившихся значений выходной величины (yyст) от
значения величины на входе системы, т.е. выходная величина постоянна во времени yуст = f(х).
Статическую характеристику (рис. 22) часто изображают графически в виде кривой у(х).
ууст
х
Рис. 22. Пример статической характеристики
Основной задачей управления объектом в статическом режиме
является уменьшение или устранение статического отклонения (yyст), которое фактически создает погрешность в управлении.
В зависимости от вида статических характеристик описывающих элементы систем управления, выделяют статические и астатические.
Статическим называется элемент, у которого при постоянном
входном воздействии с течением времени устанавливается постоянная
выходная величина. Например, при подаче на вход нагревателя различных значений напряжения он будет нагреваться до соответствующих этим напряжениям значений температуры.
Астатическим называется элемент, у которого при постоянном
входном воздействии сигнал на выходе непрерывно растет с постоянной скоростью, ускорением и т. д. (например, обороты вала электродвигателя).
48
8.2.2. Динамические характеристики
Наиболее значимым режимом работы объектов, а следовательно, и систем управления является динамический режим. В реальном
технологическом процессе всегда имеет место наложение детерминированных и случайных составляющих на его координаты или параметры. Так, в процессе обработки происходят изменения характеристик сырья во времени, изменяется тепловой фон окружающей
среды, происходят изменения напряжения питания в сети, давления
пара в магистрали при подключениях и отключениях потребителей и
т. д. Поэтому основное внимание при синтезе систем управления
уделяется их работе именно в динамических режимах.
При подачи на вход системы управления возмущающего воздействия, система должна от одного установившегося режима перейдет к
другому. Такой переход называется переходным процессом.
Переходный процесс характеризует динамические свойства
системы, ее поведение. Он может изображаться графически, в виде
кривой - y(t). Например, процесс нагрева сушильного шкафа до установившегося значения может иметь вид, представленный на рис. 23.
у, °С
ууст
0
t
Рис. 23. Пример переходного процесса
Возмущения, действующие на САР, представляют собой непрерывные функции времени с различными законами изменения.
Один и тот возмущающий сигнал может иметь различную
физическую природу (электрическую, пневматическую, звуковую, световую и т. д.), но его математические представление будет одинаковым. Для анализа динамических и статических свойств
49
САУ часто используют типовые возмущающие воздействия, которые
представляют собой либо наиболее вероятные, либо наиболее неблагоприятные законы изменения управляющих и возмущающих воздействий.
К типовым возмущающим воздействия относятся:
− единичная ступенчатая функция;
− импульсное воздействие;
− гармонические воздействия.
Единичной ступенчатой функцией - 1(t) (функция Хевисайда)
0, при t < 0
1(t ) =
1, при t > 0.
называется функция, которая равна:
Графическое представление единичного ступенчатого воздействия представлено на рис. 24.
f(t)
1
0
t
Рис. 24. Единичное ступенчатое воздействие
Для автоматических систем 1(t) является распространенным
видом входного воздействия. Как правило, подобные воздействия сопровождают процессы включения, выключения систем и вызывают
переходы от одного установившегося состояния к другому (изменение задания температуры в теплообменнике, уровня в баке и т. д.).
Единичное импульсное воздействие - δ(t) (дельта-функция
Дирака) представляет собой математическую идеализацию импульса бесконечно малой длительности, бесконечно большой амплитуды, имеющего конечную площадь, равную единице:
50
∫ δ ( t ) dt = 1 .
В качестве импульсного типового воздействия используется
воздействие следующего вида:
0, при t ≠ 0
δ (t ) =
∞, при t = 0.
Графическое представление импульсного воздействия представлено на рис. 25.
x
t
0
Рис. 25. Дельта–функция
Для автоматических систем является менее распространенным
видом входного воздействия, чем единичная ступенчатая функция.
Практически реализовать дельта-функцию Дирака δ(t) сложнее
чем функцию 1(t). Однако для теоретического
описания возмущений имеет существенное значение. Подобные воздействия характерны для включения, скачков тока и т. д. (рис. 26).
x
0 Δt
t
Рис. 26. Практическая реализация импульсного воздействия
51
Существует следующая связь между единичной ступенчатой
функцией и дельта – функцией:
d1(t )
1(t ) = δ (t ) dt или
=δ (t ).
dt
Гармоническое возмущающее воздействие представляет собой
синусоидальное воздействие подаваемые на вход системы:
х(t) = A·sin(ω),
где А – амплитуда колебаний; ω = 1/Т – частота колебаний; Т – период колебаний; t – время.
Графическое представление гармонических возмущающих воздействий приведено на рис. 27.
x
А
∫
t
Т
Рис. 27. Гармоническое возмущающие воздействие
Если использовать формулу Эйлера гармонический сигнал
можно записать:
х(t) = Авх.ejωt,
где ejω= cos(ωt) + j.sin(ωt); j = − 1 - мнимая единица.
Периодические гармонические сигналы составляют особый
класс воздействий на САР которые определяют частотные характеристики системы. Примерами гармонического сигнала являются частота переменного тока, вибрации и т. д.
Графическое изображение переходных процессов системы
(объекта) на типовые возмущающие воздействия называются динамическими (временными) характеристиками.
В зависимости от вида входного воздействия различают следующие динамические характеристики:
− переходная;
− импульсная (весовая);
− частотная.
52
Переходной функцией h(t) - называют функцию, описывающая
реакцию объекта на единичное ступенчатое воздействие 1(t), при нулевых начальных условиях, т.е. при х(0) = 0 и у(0) = 0.
График переходной функции, представляющий собой зависимость функции h(t) от времени t, называют переходной характеристикой (рис. 28).
СУ
Рис. 28. Переходная характеристика
В том случае, если амплитуда единичного ступенчатого воздействия отлична от единицы получают разновидность переходной
характеристики, которая называется кривой разгона.
Импульсной или весовой функцией ω(t) - называют функцию,
описывающую реакцию объекта на единичное импульсное воздействие δ(t), при нулевых начальных условиях.
График зависимости функции ω(t) от времени называют импульсной или весовой характеристикой (рис. 29).
СУ
Рис. 29. Импульсная характеристика
Между переходной и импульсной функциями существует следующая зависимость:
53
dh(t )
= ω (t ).
dt
Частотными характеристиками - называются зависимости
амплитуды и фазы выходного сигнала системы в установившемся
режиме от входного гармонического воздействия.
8.2.3. Частотные характеристики
В условиях реальной эксплуатации САУ часто возникает необходимость определить реакцию системы на периодические сигналы,
т. е. определить сигнал на выходе САУ, если на один из входов подается периодически сигнал гармонической формы. Решение этой задачи возможно получить путем использования частотных характеристик. Частотные характеристики могут быть получены аналитическим или экспериментальным путем
Если на вход любой системы подать сигнал синусоидальной
формы: х = Авхsin(ωt), то на выходе системы будет также синусоидальный сигнал той же частоты ω, но другой амплитуды Авых и с углом фазового сдвига ϕ: у(t) = Авыхsin(ωt + ϕ) (рис. 30).
х(t)
СУ
у(t)
Рис. 30. Прохождение гармонического сигнала через СУ
При разных значениях ω величины Авых и ϕ, как правило, также
будут различными. Эти зависимости амплитуды и фазы от частоты
называют частотными характеристиками.
Различают следующие виды частотных характеристик:
− АФЧХ - амплитудно-фазовая частотная характеристика;
− АЧХ - амплитудно-частотная характеристика;
− ФЧХ - фазово-частотная характеристика;
− ЛАЧХ, ЛФЧХ - логарифмические амплитудная и фазовая
частотные характеристики.
54
В математике АЧХ и ФЧХ называют, соответственно, модулем
и аргументом комплексной функции:
W ( jω ) = A(ω)e jϕ (ω ) .
Комплексная функция является аналитическим выражением
комплексной частотной характеристики.
Комплексная частотная характеристика (АФЧХ) строится на
комплексной плоскости и представляет собой кривую траектории
конца вектора W ( jω ) в рабочем диапазоне изменения частот ( ω = 0
÷ ∞), называемую годографом.
На рис. 31 показан годограф (АФЧХ) построенный по трем точкам для частот ω1 , ω 2 , ω3
Рис. 31. АФЧХ
Комплексную функция W(jω) можно получить из передаточной
функции W(s) путём подставки вместо s = jω и записать в комплексном виде:
W ( jω ) = Re( jω ) + j Im(ω ) ,
где Re(ω) - вещественная составляющая, а Im(ω) - мнимая составляющая.
Соответственно амплитуда А(ω ) и фазовый сдвиг ϕ (ω ) связаны с комплексными составляющими формулами:
А(ω ) = Re 2 (ω ) + Im 2 (ω ) ,
ϕ (ω ) = arctg
Im(ω )
.
Re(ω )
55
Функция А(ω), представленная при изменении частоты от 0 до
∞ получило название амплитудной частотной характеристики
(АЧХ).
Функция ϕ(ω), представленная при изменении частоты от 0 до
∞ называется фазовой частотной характеристикой (ФЧХ).
На рис. 32 представлены графики АЧХ и ФЧХ построенные по
трем точкам.
Рис. 32. АЧХ и ФЧХ
Кроме рассматриваемых выше частотных характеристик, в инженерных расчетах часто используются логарифмические частотные характеристики (ЛЧХ). ЛЧХ называют также диаграммами
Боде.
Существуют два основных вида ЛЧХ, которые, как правило,
используются совместно и изображаются в виде графиков:
1) ЛАЧХ - логарифмическая АЧХ.
Для оценки отношения двух величин используется логарифмическая единица – децибел (дБ).
Бел представляет собой логарифмическую единицу измерения,
соответствующую десятикратному увеличению мощности. Один бел
соответствует увеличению мощности в 10 раз, 2 бела - в 100 раз
и т. д.
Характеристика определяющая связь между числом децибел
L(ω) и амплитудой A(ω) и называется ЛАЧХ определяется формулой:
Lm(ω) = 20.lg A(ω).
При построении графика ЛАЧХ (рис. 33) по оси абсцисс откладывается частота в логарифмическом масштабе lgω, а возле отметок
56
пишут само значение частоты ω, выраженное в радианах в единицу
времени. Это означает, что равным величинам отрезков по оси ω соответствуют кратные значения частоты. Для ЛЧХ кратность = 10. По
оси ординат откладываются значения L(ω) в обычном масштабе.
2) ЛФЧХ - логарифмическая ФЧХ. Представляет из себя логарифмическую характеристику, у которой ось частоты ω проградуирована в логарифмическом масштабе в соответствии с ЛАЧХ, а по
оси ординат откладываются фазы ϕ в градусах в линейном масштабе.
ϕ(ω)
L(ω)
20
-20
90
0,01
0,1
1
10
0,01
0,1
ω
1 10
ω
-20 дБ/дек -90
Рис. 33. Пример ЛАЧХ и ЛФЧХ
Примеры ЛЧХ представлены на рис. 33.
8.2.4. Дифференциальные уравнения
Известно, что любое движение, процессы передачи, обмена,
преобразования энергии и вещества математически можно описать в
виде дифференциальных уравнений (ДУ). Аппарат ДУ является также основным математическим аппаратом при изучении и исследовании систем управления. Решив ДУ, можно найти характер изменения
регулируемой переменной в переходных и установившихся режимах
при различных воздействиях на систему.
Порядком ДУ называют максимальную степень дифференцирования в уравнении. Обычно составляя модель объекта на основании физических законов, чаще всего получаем систему дифференциальных уравнений первого и второго порядка.
57
При составлении описании различают стационарные объекты,
коэффициенты ДУ которых не изменяются во времени, и нестационарные и объекты, у которых коэффициенты изменяются с течением
времени, например, изменение теплопроводности, старение катализатора и др. Первые относятся к классу линейных систем управления и
описываются линейными ДУ с коэффициентами, не зависящими от
переменных величин, входящих в уравнение, т. е. являются постоянными либо зависящими от времени. Например, если система уравнений описывается дифференциальным уравнением второго порядка
вида:
d 2 y (t )
dy (t )
+ a1
+ a2 y (t ) = b0 x (t )
2
dt
dt
и коэффициенты а0, а1, а2 и b0 не зависят от переменных у, y ′, y ′′ и х,
то такая система относится к классу линейных.
a0
Если хотя бы один из этих коэффициентов зависит от переменных, входящих в уравнение, то уравнение, а следовательно, и система
относится к классу нелинейных.
Нелинейным будет и выражение вида:
dy (t ) d 2 y (t )
dx(t )
, 2 , x(t ),
) = 0.
dx(t ) dx (t )
dt
Так как y и x, в свою очередь, являются векторами, то это выражение есть система нелинейных дифференциальных уравнений.
Математический аппарат решение различных линейных ДУ хорошо развит, это классический метод решения (нахождение общего
решения ДУ и частного), метод Лагража (вариации произвольной постоянной), метод Бернулли, приведение к форме Коши и др. Это позволяет решать большинство известных практических задач управления химико-технологическими объектами, модели которых описываются или приводятся к данному классу уравнений.
Однако в большинстве случаев в реальных элементах системы
связь между входной и выходной величинами является нелинейной и
часто задается в графической форме. Поэтому даже если ДУ системы
F ( y (t ),
58
и будет получено, оно будет нелинейным. Это легко понять хотя бы
потому, что всегда есть предельно допустимое значение входного
сигнала – при его превышении объект может просто выйти из строя
или даже разрушиться (линейность нарушается). Методы исследования нелинейных операторов очень сложны математически, в теории
нелинейных систем точные решения известны только для достаточно
узкого круга задач. Общих методов решения систем нелинейных
дифференциальных уравнений не существует. Поэтому решают их
приближенно, либо с использованием различных численных методов,
либо за счет упрощения модели путем линеаризации нелинейных ДУ.
Замена нелинейного ДУ приближенным линейным называется
линеаризацией. Считают, что в процессе регулирования отклонения
всех изменяющихся величин от их установившихся значений малы, и
поэтому возможна замена нелинейных ДУ приближенными линейными ДУ. Для этого нелинейные функции переменных, входящих в
уравнение движения, разлагают в ряд Тейлора в окрестностях рабочей точки (установившегося значения переменных). На том основании, что отклонения малы, в разложении оставляют лишь члены, содержащие отклонения в первых степенях, после чего из полученных
уравнений вычитают уравнения равновесия (статики) и получают запись линеаризованных уравнений в отклонениях.
Рассмотрим сущность процесса линеаризации на примере сушильного шкафа. Зависимость температуры - Т объекта от подаваемого напряжения - U в большинстве случаев нелинейна и имеет вид,
представленный на рис. 34.
Объект в общем виде описывается нелинейной функцией двух
переменных: F(U,T) = F(х,у) = 0.
Т
Объект
Модель
уо
хо
U
Рис. 34. Пример графической линеаризации объекта в точке (х0, у0)
59
Разложим данную функцию в окрестности некоторой точки (х0,
у0) в ряд Тейлора по формуле:
∂F
∂F
F ( x, y ) = F ( x0 + ∆x, y0 + ∆y ) = F ( x0 , y0 ) +
⋅ ∆x +
⋅ ∆y +
∂x 0
∂y 0
∞
n
1 ∂
∂
∆x + ∆y F ( x0 , y0 ).
∂y
n= 2 n! ∂x
Линейная часть приведенного разложения определяется лишь
первыми тремя членами, остальными слагаемыми можно пренебречь
в силу малости Δx, Δy. Эту процедуру можно интерпретировать как
замену в окрестности точки (х0, у0) рассматриваемого участка кривой
на касательную (см. рис. 33), уравнение которой определяется по
формуле:
∂F
∂F
⋅ ∆x +
⋅ ∆y = 0,
∂x 0
∂y 0
+
∑
∂F
∂F
и
- частные производные от F по х и у. Данное уравне∂у
∂x
ние называется уравнением в приращениях, поскольку значения х и у
здесь заменены на приращения ∆х = х - х0 и ∆у = у - у0.
При наличии в уравнении производных линеаризация ДУ происходит аналогично, отличие состоит только в том, что необходимо
∂F ∂F
∂F
искать частные производные по производным (
,
,
и т.
∂x ' ∂x ' ' ∂x ' ' '
д.).
где
Пример.
Пусть объект описывается дифференциальным уравнением второго
порядка:
3 xy − 4 x 2 + 1,5
dx
dy
y=5 + y .
dy
dt
Данное ДУ является нелинейным из-за наличия произведений переменных х и у. Линеаризируем его в окрестности точки с координатами x0 =
1, x’0 = 0, y’0 = 0. Для определения недостающего начального условия у0 подставим данные значения в ДУ:
3 xy − 4 + 0 = 0 + y0 , откуда y0 = 2.
60
Введем в рассмотрение функцию
F = 3xy − 4 x 2 + 1,5 x ' y − 5 y ' − y
и определим все ее производные при заданных начальных условиях:
dF
= (3 y − 8 х ) 0 = 3 ⋅ 2 − 8 ⋅ 1 = −2 ;
dx 0
dF
dy
0
dF
dx '
0
dF
dy '
0
= (3x − 1,5 х ' − 1) = 3 ⋅1 + 1,5 ⋅ 0 − 1 = 2 ;
0
= (1,5 y ) 0 = 1,5 ⋅ 2 = 3 ;
= −5 .
Теперь, используя полученные коэффициенты, можно записать окончательное линейное ДУ:
-5.∆y’ + 2.∆y + 3.∆х’ - 2.∆х = 0.
Исследование АСУ существенно упрощается при использовании
прикладных математических методов операционного исчисления, например, преобразования Лапласа. Применение преобразования Лапласа позволяет перейти от решения системы дифференциальных уравнений к решению системы алгебраических уравнений. Кроме того, отпадает необходимость специального определения постоянных интегрирования, а общее решение неоднородного ДУ при любой правой части
определяется сразу, т.е. исключается раздельное нахождение общего
y1(t) и частного y2(t) решений.
Пусть f(t) - действительная функция действительного переменного
t, удовлетворяющая условиям Дирихле (непрерывная и дифференцируемая на рассматриваемом интервале) и равная нулю при t < 0. Будем называть эту функцию оригиналом. Каждому оригиналу f(t) всегда можно поставить в соответствие функцию F(s) комплексного переменного s = α ±
jω, определенную как интеграл вида:
F ( s ) = L{ f (t )} =
∞
∫ f (t )e
− st
dt.
0
61
Здесь L – оператор прямого преобразования Лапласа. Комплексная переменная - s выбирается так, чтобы интеграл сходился.
Правая часть этого выражения называется прямым преобразованием Лапласа функции f(t), а функция F(s) – изображением Лапласа для функции f(t) (оригинала).
Обратное преобразование Лапласа L-1{F(s)} позволяет вычислить оригинал f(t) по известному изображению F(s):
f ( t ) = L−1 {F ( s )} =
1
2πj
σ + j∞
∫ F ( s )e
st
ds ,
σ − j∞
где j = − 1 , а постоянная σ выбирается так, чтобы интеграл сходился.
На практике вместо интегралов чаще всего используют готовые
таблицы, по которым можно сразу определить изображение по оригиналу и наоборот. Пример части такой таблицы представлен в табл.
1.
Таблица 1
Оригинал x(t)
δ-функция
1
Изображение X(s)
1
1/ s
t
1/ s2
n!
n +1
1 / (s + α )
tn
e-αt
d n x (t )
sn.X(s)
dt n
t
∫ x(t )dt
X ( s) / s
0
Переход от одной модели к другой достаточно прост и заклюdn
чается в замене знаков дифференциалов
на операторы sn,
dt n
знаков интегралов
∫ ...dt
бражениями X(s) и Y(s).
62
на множители
1
, а самих x(t) и y(t) - изоs
Пример.
Пусть объект описывается дифференциальным уравнением второго
порядка:
d2y
dy
dx
+ 5 + 6 y = 2 + 12 x .
2
dt
dt
dt
Входной сигнал – х имеет форму единичного ступенчатого воздействия, т.е. x(t) = 1. Тогда изображение входного сигнала X(s) =
1
.
s
Производим преобразование исходного ДУ по Лапласу и подставляем
X(s):
s2Y(s) + 5sY(s) + 6Y(s) = 2sX(s) + 12X(s),
1
1
s2Y(s) + 5sY(s) + 6Y(s) = 2s + 12 ,
s
s
Y(s)(s3 + 5s2 + 6s) = 2s + 12.
Определяется выражение для Y(s):
Y (s ) =
2s + 12
.
s + 5s 2 + 6s
3
Оригинал полученной функции отсутствует в таблице оригиналов и
изображений. Для решения задачи его поиска дробь разбивается на сумму
простых дробей с учетом того, что знаменатель может быть представлен в
виде s(s + 2)(s + 3):
Y (s ) =
M3
M
M2
2s + 12
2s + 12
=
= 1+
+
=
2
s
(
s
+
2
)(
s
+
3
)
s + 5s + 6s
s
s+2 s +3
3
( M1 + M 2 + M 3 ) s 2 + (5M1 + 3M 2 + 2M 3 )s + 6M1
.
s ( s + 2)( s + 3)
Сравнивая получившуюся дробь с исходной, можно составить систему из трех уравнений с тремя неизвестными:
=
М1 + М2 + М3 = 0
.
.
.
5 М1 + 3 М2 + 2 М3 = 2
6.М1 = 12
M1 = 2
=>
M2 = -4
M3 = 2
63
Следовательно, дробь можно представить как сумму трех дробей:
Y (s ) =
4
2
2s + 12
2
= +
.
s 3 + 5s 2 + 6s s s + 2 s + 3
Теперь, можно используя табличные функции, определить оригинал
выходной функции:
y(t) = 2 - 4.e-2t + 2.e-3t.
8.2.5. Передаточные функции
Понятие передаточная функция является наиболее важной категорией в теории автоматического управления. Передаточная функция
является своего рода математической моделью САУ,
т. к. полностью характеризует динамические свойства системы.
Преобразование ДУ по Лапласу дает возможность ввести понятие передаточной функции.
Пусть модель системы управления задана линейным ДУ второго
порядка, связывающим выход у(t) со входом х(t) и возмущением f(t):
d 2 y (t )
dy (t )
dx (t )
df (t )
a2
+ a1
+ a0 y (t ) = b1
+ b0 x (t ) + с1
+ с0 f (t ) ,
2
dt
dt
dt
dt
где ai, bj, cj - постоянные коэффициенты, зависящие от параметров
системы.
Перейдем к алгебраическому уравнению, записанному в операторной форме по Лапласу, используя формулы прямого преобразования по Лапласу:
∞
∫
− st
∞
∫
− st
Y ( s) = y (t )e dt; X ( s ) = x (t )e dt; F ( s ) =
0
0
∞
∫ f (t )e
− st
dt.
0
Исходное ДУ при нулевых начальных условиях равносильно
линейному алгебраическому уравнению:
a2s2Y(s)+a1sY(s)+a0Y(s)=b1sX(s)+b0X(s)+c1sF(s)+c0F(s).
Преобразуем полученное уравнение путем выноса X(s) и Y(s) за
скобки:
Y(s)∙(a2s2+a1 s+a0)=X(s)∙(b1s+b0)+ F(s)∙(c1s+c0).
64
В выражении полином, стоящий при выходном параметре Y(s),
называется собственным оператором и обозначается А(s). Полиномы
при воздействиях Х(s) и F(s) называются соответственно оператором
управляющего воздействия и оператором возмущающего воздействия. Оператор управляющего воздействия обозначим В(s), а оператор
возмущающего воздействия обозначим С(s):
Y(s)∙А(s) = X(s)∙В(s) + F(s)∙С(s).
Передаточной функцией называется отношение изображения
по Лапласу выходной величины Y(s) к изображению входной величины X(s) (или F(s)) при нулевых начальных условиях:
W (s ) =
Y (s )
.
X (s )
Поскольку у системы два входа (задание и возмущение), то для
линейных систем можно применить принцип суперпозиций (реакция
системы на сумму воздействий равна сумме реакций на каждое воздействие в отдельности) и выделить два случая:
- сигнал F(s) = 0, тогда А(s)∙Y(s) = В(s)∙X(s);
- сигнал X(s) = 0, тогда А(s)∙Y(s) = С(s) F(s).
Тогда для любой САР, имеющей входы по управлению и по
возмущению, можно определить две передаточные функции по
управлению Wу(s) и по возмущению Wв(s), которые представляют собой отношения следующих полиномов:
Y ( s) B( s )
b1s + b0
=
=
,
2
X ( s) A( s ) a2 s + a1 s + a0
Y ( s ) B( s )
c1s + c0
Wв ( S ) =
=
=
.
F ( s) C ( s) a2 s 2 + a1s + a0
Общая передаточная функция системы Wс(s) будет:
Wy ( S ) =
Wс (S ) = W y ( S ) + Wв ( S ) =
b1s + b0
c1s + c0
+
.
2
a2 s + a1s + a0 a2 s + a1s + a0
2
Передаточные функции содержат особые точки на комплексной
плоскости - нули и полюса.
65
Нули - это те значения s, при которых передаточная функция
равна нулю. Для нахождения нулей числитель передаточной функции
приравнивается к нулю и полученное алгебраическое уравнение решается относительно s.
Полюса - это те значения s, при которых передаточная функция
превращается в бесконечность.
Знаменатель передаточной функции приравненный к нулю называется характеристическим уравнением системы.
В рассмотренном примере характеристическое уравнение будет:
a2 s 2 + a1s + a0 = 0 .
Нули и полюса определяют свойства системы.
8.3. Типовых звенья САР
Современные СУ состоят из элементов различной физической
природы (электрические, пневматические, механические и др. звенья), конструктивного исполнения, источников энергии и т. д. Однако динамические свойства некоторых элементов можно отнести к одной группе и описать одним и тем же ДУ низкого порядка (первого
или второго).
Элемент системы, обладающий определенными свойствами в
динамическом отношении называется звеном.
Соотношение входных и выходных сигналов в звеньях одной
группы описываются одинаковыми передаточными функциями. Звенья, передаточные функции которых имеют вид простых множителей
или дробей, называют типовыми. К простейшим типовым звеньям
относятся:
1) усилительное;
2) интегрирующее;
3) дифференцирующее;
4) апериодическое;
5) форсирующее;
6) колебательное;
7) запаздывающее.
66
По ряду общих закономерностей типовые звенья можно разделить на следующие группы:
1. Статические звенья, у которых статическая характеристика
отлична от нуля, имеют однозначную связь между входной и выходной переменными в статическом режиме. К ним относят усилительное, апериодическое, колебательное звенья, у которых передаточный
коэффициент связан с передаточной функцией соотношением
W ( s) s = K .
=0
2. Дифференцирующие звенья, у которых статическая характеристика равна нулю, – это идеальное и реальное дифференцирующие
звенья. В их передаточную функцию всегда входит сомножитель s,
поэтому W ( s) s =0 = 0 .
3. Астатические звенья – звенья, не имеющие статической характеристики, к ним относится интегрирующее звено, в передаточную функцию которого обязательно входит сомножитель 1/s, поэтому W ( s) s =0 = ∞
8.3.1. Усилительное звено
Преобразует сигнал в соответствии с уравнением:
у(t) = К∙х(t).
Звено усиливает входной сигнал в К раз. Параметр К называется коэффициентом усиления.
Передаточная функция WП(s) = К.
Выходной сигнал такого звена в точности повторяет 1(t) входной сигнал, усиленный в К раз ( рис. 35).
h(t)
К
t
0
Рис. 35. Выходная характеристика усилительного звена
67
На рис. 36 представлен рычаг, в котором коэффициент передачи К определяется соотношением длин плеч K = L1 / L2 .
Рис. 36. Пример усилительного звена
Примерами усилительных звеньев также датчики, клапаны с
линеаризованной характеристикой, безинерционные усилители, механические передачи и др.
8.3.2. Интегрирующее звено
Преобразует сигнал в соответствии с уравнением:
dy (t )
= Kx(t ) .
dt
Передаточная функция WИ(s) = K / s .
t
∫
Решение исходного уравнения дает: y (t ) = y (0) + K x (t )dt .
0
Выходная величина идеального интегрирующего звена пропорциональна интегралу входной величины. При подаче на вход звена
1(t) и σ(t) воздействий, выходной сигнал будет изменяться (рис. 37).
Рис. 37. Выходные характеристики интегрирующего звена
Это звено астатическое, т. е. не имеет установившегося режима.
Простейший пример интегрирующего звена – ванна, в которую
набирается вода. Входной сигнал – это поток воды через кран, выход
68
системы – уровень воды в ванне. При поступлении воды уровень растет, система «накапливает» (интегрирует) входной сигнал.
8.3.3. Дифференцирующее звено
Уравнение идеального дифференцирующего звена:
dx(t )
y (t ) = K
.
dt
Выходная величина дифференцирующего звена пропорциональна производной по времени от входной.
Передаточная функция W(s) = K∙s.
Численное решение данного уравнения требует построения
системы рекуррентных выражений.
Известно, что производная единичного ступенчатого сигнала
1(t) в точке t = 0 – это дельта-функция δ(t) . Поэтому переходная и весовая функции дифференцирующего звена
h(t) = kδ (t), w(t ) = K
dδ( t )
.
dt
Это физически нереализуемые функции, так как дельтафункцию и ее производную, имеющие бесконечные значения, невозможно получить на реальном устройстве. Поэтому идеальное дифференцирующее относится к физически нереализуемым звеньям.
В технике не могут использоваться физически нереализуемые
звенья. Поэтому большинство объектов, которые представляют собой
дифференцирующие звенья, относятся к реальным дифференцирующим звеньям которые описываются уравнением:
dy (t )
dx(t )
T
+ y (t ) = K
.
dt
dt
Передаточная функция реально дифференцирующего звена
имеет вид:
Ks
W(s) =
.
Ts + 1
69
Фактически это последовательное соединение идеального
дифференцирующего и апериодического звеньев.
Примером реально дифференцирующего звена может служить
механический демпфер.
8.3.4. Апериодическое звено 1-го порядка
Апериодическое (инерционное) звено 1-го порядка преобразует
сигнал в соответствии с дифференциальным уравнением:
dy
T
+ y = Kx ,
dt
где Т - параметр звена, который называется постоянная времени. Постоянная времени - размерная величина, она измеряется в секундах и
характеризует инерционность объекта, то есть скорость его реакции
на изменение входного сигнала.
Этому звену соответствуют передаточная функция вида:
W(s) = K / (T ⋅ s + 1) .
Рекуррентное выражение для численного решения исходного
уравнения:
∆t
∆t
y n = 1 − y n −1 + ⋅ K ⋅ xn−1 .
T
T
Графики изменения выходной величины при подаче на вход 1(t)
и σ(t) представлены на рис. 38.
h(t)
w(t)
К
К
0
t
0
t
Рис. 38. Выходные характеристики апериодического звена
70
Апериодическое звено инерционное, колебания на выходе звена
отстают от колебаний на входе.
Примерами апериодического звена являются: гидравлическая
система с дросселем на выходе, электрическая печь, теплообменник и
т.д.
8.3.5. Форсирующее звено
Уравнение форсирующего звена 1-го порядка:
dx(t )
y = K x (t ) + Т
.
dt
Такое звено может быть получено в результате параллельного
соединения усилительного и идеального дифференцирующего звеньев. Оно характеризуется двумя параметрами: коэффициентом передачи K и постоянной времени Т. Передаточная функция
W = K (Ts + 1) .
Форсирующие звенья обычно искусственно вводят в автоматическую систему и включают последовательно с апериодическими
звеньями для компенсации их инерционности и ускорения переходных процессов (такое ускорение называют форсировкой). На практике могут быть созданы реальные форсирующие звенья с передаточной функцией:
W = K (T1s + 1) / (T2 s + 1) .
8.3.6. Колебательное звено
Уравнение колебательного звена:
d2y
dy
T22 2 + T1
+ y = Kx .
dt
dt
Колебательное звено отличается от предыдущих тем, что переходный процесс носит не монотонный, а колебательный характер.
71
Передаточная функция имеет вид
W(s)= K / T22 s 2 + T1s + 1 или W = K / (T 2 S 2 + 2ξTS + 1),
где K – коэффициент усиления, T – постоянная времени (в секундах),
ξ – параметр затухания (0<ξ<1). Постоянная времени определяет
инерционность объекта, чем она больше, тем медленнее изменяется
выход при изменении входа. Чем больше ξ , тем быстрее затухают
колебания.
Если ξ = 0 получается консервативное звено которое дает незатухающие колебания на выходе с W ( s ) = K / (T 2 S 2 + 1) .
При ξ ≥ 1 (Т1≥ 2Т2) получается апериодическое звено 2-го порядка, то есть последовательное соединение двух апериодических
звеньев с передаточной функцией:
(
W (s ) =
K
T2 s + T1 s + 1
2 2
)
=
K
, T3 , T4 = 0,5(T1 ± T12 − 4T2 2 ) .
(T3 s + 1)(T4 s + 1)
При подаче на вход ступенчатого воздействия амплитудой х0
переходная кривая h(t) (рис. 39) будет иметь один из трех
видов:
апериодический (ξ ≥ 1 или Т1 ≥ 2Т2), колебательный (0<ξ<1 или
Т1 < 2Т2) или незатухающие колебания е колебания (ξ =0 или Т1=0).
Рис. 39. Переходные характеристики колебательного звена
72
8.3.7. Звено запаздывания
Звено чистого запаздывания преобразует сигнал на выходе в соответствии с уравнением:
y(t) = x(t - τ),
где τ- параметр звена, время запаздывания .
Передаточная функция имеет вида: W(s) = e-τs.
Выходная величина у(t) в точности повторяет входную величину х(t) с некоторым запаздыванием τ (рис. 40).
h(t)
К
τ
t
Рис. 40. Выходная характеристика звена запаздывания
Примером звена чистого запаздывания является движение груза
по конвейеру (рис. 41), движение жидкости по трубопроводу.
Рис. 41. АФЧХ звена чистого запаздывания
Транспортер представляет собой непрерывную ленту 1, приводимую в движение валками 2. На ленту из бункера 4 непрерывно высыпается мелкодисперсный материал 3, который переносится транспортиром на другой его конец. Время запаздывания вычисляется из
выражения:
τ= L/V.
73
Другой распространенный пример – вычислительное запаздывание в компьютере. Так называется время, которое необходимо для
расчета нового управляющего сигнала после получения всех исходных данных.
8.4. Соединения звеньев
Практически любую сложную динамическую систему управления в целях упрощения анализа можно представить в виде соединений элементарных звеньев. Определив передаточные функции каждого элемента, легко получить общую передаточную функцию всей
системы. Конечный вид передаточной функции САУ зависит от способа соединения звеньев. Различают следующие способы соединения
звеньев в системе:
− последовательное,
− параллельное
− с помощью обратных связей.
Существуют следующие правила структурных преобразований
звеньев, в которых считается, что каждый элемент имеет только один
вход и один выход и заданную передаточную функцию.
8.4.1. Последовательное соединение
Соединение звеньев представленное на рис. 42 называется последовательным.
x
x1
W1
x2
W2
xn-1
y
Wn
Рис. 42. Последовательное соединение звеньев
Имеем:
X1=X·W1
X2=X1·W2
………….
Y=Xn-1·Wn
Подставляя в последнее выражение Xn получаем:
Y=X·W1·W2·...·Wn или Wоб=W1·W2·...·Wn.
74
При последовательном соединении звеньев их передаточные
функции перемножаются:
Wоб ( s) =
n
∏ W (s) .
i
i =1
8.4.2. Параллельное соединение
Соединение звеньев представленное на рис. 43 называется параллельным.
у1
W1
х
у2
W2
у
уn
Wn
Рис. 43. Параллельное соединение звеньев
Выходные сигналы каждого звена будут:
Y1=X·W1
Y2=X·W2
………….
Yn=X·Wn
Общий выходной сигнал:
Y=Y1+Y2+...+Yn или Y= X·W1+X·W2+...+X·Wn.
Откуда Wоб=Y/X=W1+W2+...+Wn..
При параллельном соединении звеньев их передаточные функции складываются
Wоб ( s ) =
n
∑W ( s) .
i
i =1
75
8.4.3. Соединение с обратной связью
Соединение звеньев представленное на рис. 44 называется с
обратной связью, или встречно-параллельное соединение.
Рис. 44. Встречно-параллельное соединение звеньев
Выходные сигналы будут:
Y=(X-Yос)·W1;
Yос=Y·W2;
Y=(X-Y·W2)·W1;
Y·(1+W1·W2)=X·W1.
Откуда общая передаточная функция при отрицательной ОС
будет равна:
y
W1
W= =
.
x 1 + W1W2
При положительной ОС передаточная функция будет равна:
W1
W=
.
1 − W1W2
Если W2=1, то соединение называется с единичной обратной
W1
связью, и общая передаточная функция будет W =
,
где
1 ± W1
«+» соответствует отрицательной ОС, «-» - положительной.
Пример.
Структурная схема замкнутой системы автоматического регулирования
с отрицательной обратной связью представлена на рис. 45.
76
f(t)
х(t)
e(t)
-
Wрег(s)
u(t)
Wим(s)
x(t)
Wоб (s)
y(t)
≈
уос(t)
Wдат(s)
Рис 45. Структурная схема САУ
Элементы системы управления задаются следующими типовыми
звеньями:
К
Wрег ( s ) = К П + И – передаточная функция регулятора;
s
К им
Wи.м ( s) =
– передаточная функция исполнительного механизма;
Т им S
К об
Wоб ( s ) =
- передаточная функция объекта регулирования;
Т об S + 1
Wдат ( s ) = К дат - передаточная функция датчика.
Передаточная функция WПС ( s ) прямой связи состоящей из трех последовательных звеньев будет:
WПС ( s ) = Wрег ( s ) ⋅Wим ( s ) ⋅ Wоб ( s ) .
Передаточная функция замкнутой системы регулирования по управлению WСУ ( s) с учетом отрицательной обратной связи будет:
WСУ ( s) =
=
Y ( s)
WПС ( s )
=
=
X ( s ) 1 + Wдат ( s ) ⋅WПС ( s)
Wрег ( s ) ⋅ Wим ( s) ⋅Wоб ( s )
1 + Wдат ( s) ⋅Wрег ( s ) ⋅Wим ( s) ⋅Wоб ( s )
=
К К
К об
К П + И ⋅ им ⋅
s
Т
S
Т
им
об S + 1
=
.
К
К
К об
1 + К дат ⋅ К П + И ⋅ им ⋅
s Т им S Т об S + 1
77
Передаточная функция замкнутой системы регулирования по возмущению WСВ ( s ) с учетом отрицательной обратной связи будет:
WСВ ( s ) =
Wрег ( s ) ⋅Wим ( s )
Y (s)
=
=
X ( s ) 1 + Wдат ( s ) ⋅Wрег ( s ) ⋅Wим ( s ) ⋅Wоб ( s )
К К
К П + И ⋅ им
s Т им S
=
.
К И К им
К об
1 + К дат ⋅ К П +
⋅
⋅
s Т им S Т об S + 1
Если выходной сигнал системы у(t) не подавать на ее вход (разорвать
связь в точке А), то получим разомкнутую систему регулирования. Передаточная функция разомкнутой системы WРС(s) с учетом последовательного
соединении звеньев будет:
WРС ( s) = Wдат ( s) ⋅ Wрег ( s ) ⋅ Wим ( s) ⋅ Wоб ( s ) =
К К
К об
= К дат ⋅ К П + И ⋅ им ⋅
.
s Т им S Т об S + 1
Для определения передаточных функций объектов, имеющих
более сложные соединения звеньев, используют либо последовательное упрощение схемы, либо преобразуют по формуле Мезона.
78
9. ПРОМЫШЛЕННЫЕ ОБЪЕКТЫ УПРАВЛЕНИЯ
Под промышленным объектом управления (регулирования) понимается устройство, в котором протекает технологический процесс,
требуемый режим работы которого должен поддерживаться извне
специально организованными управляющими воздействиями.
Все объекты управления условно можно классифицировать
следующим образом:
1. По характеру протекания технологических процессов:
− на циклические;
− непрерывно-циклические;
− непрерывные.
Локальные системы управления наиболее широко применяются
для управления объектами второго и третьего типов.
2. По количеству входных и выходных величин и их взаимосвязи:
− на одномерные (один вход и один выход);
− многомерные.
Одномерные объекты описываются одним уравнением динамики (статики), а многомерные системой уравнений, количество которых соответствует числу выходных величин. Многомерные объекты
могут быть односвязными (независимыми) и многосвязными. В односвязном ОУ каждая входная величина влияет только на одну выходную величину. Многомерные односвязные объекты разбиваются
на несколько одномерных и рассматриваются независимо друг от
друга (рис. 46, а). В многосвязном ОУ хотя бы одна входная величина влияет одновременно на несколько выходных величин. Выходные
величины многомерного многосвязного объекта являются взаимозависимыми с перекрестными связями между параметрами (рис. 46, б).
79
Свх Твх Тх
f
u2
y1
Fвх
Свых
y1
Fx
Т
б
а
Рис. 46. Схема динамических каналов многомерного объекта: а- односвязного; б - многосвязного.
Примером многомерного многосвязного ОУ может служить реактор идеального смешения, в котором проводится экзотермическая
реакция. В качестве выходных величин можно рассматривать концентрацию продуктов реакции Свых и температуру в реакторе Т, которые зависят от пяти основных входных величин (Fвх, Свх, Твх, Fx, Тх расхода реагентов в реактор, их концентрации и температуры, расхода хладагента и его температуры соответственно). Выходные величины (Свых, Т) реактора подвержены влиянию всех его входных величин. Уравнения модели динамики такого двухмерного объекта:
3. По виду статических характеристик:
С вых = f1 ( Fвх , Свх , Т вх , Fх , Т х , t ),
Т = f 2 ( Fвх , Свх , Т вх , Fх , Т х , t ).
− на линейные
− нелинейные.
Статические характеристики объекта управления устанавливают связь между установившимися значениями входа и выхода
объекта.
Линейный объект - объект управления, в математической модели функционирования которого все зависимости между величинами могут быть представлены линейными функциями.
Линейный объект должен обладать свойством гомогенности
(однородности). Необходимо, чтобы при изменении входной пере80
менной в K раз реакция (выходная переменная) объекта изменилась в
то же число раз т. е. оказалась равна Kу(t).
Нелинейный объект - объект управления, в математической
модели функционирования которого хотя бы одна зависимость между величинами является нелинейной функцией.
Нелинейная статическая характеристика может быть гладкой,
линеаризуемой в окрестности заданной точки, либо носить существенно нелинейный характер.
При наличии в объекте нескольких нелинейностей, графическим методом определяется его суммарная нелинейная характеристика.
4. По виду изменения параметров от времени:
− на стационарные;
− нестационарные.
В нестационарных объектах параметры изменяются с течением
времени (дрейфуют). Примерами таких объектов могут быть химический реактор с катализатором, активность которого падает с течением времени, или самолет, масса которого по мере выгорания топлива
уменьшается. Такие явления должны учитываться при проектирование соответствующих систем управления.
5. По виду изменения параметров от координат:
− с сосредоточенными параметрами;
− с распределенными параметрами.
У объектов с сосредоточенными параметрами выходные величины не зависят от пространственной координаты и имеют в определенный момент времени одно и то же числовое значение в каждой
точке внутри объекта. Примерами таких объектов являются: химический реактор идеального смешения, резервуар со свободным истечением жидкости, газгольдер и т. д.
Выходные величины объектов с распределенными параметрами в определенный момент времени имеют разные числовые значения в различных точках объекта т. е. изменяются в пространстве.
Примерами объектов с распределенными параметрами являются
трубчатые реакторы, массообменные колонные аппараты (ректифика81
ционные, дистилляционные, абсорбционные, экстракционные), кожухотрубные теплообменники, теплообменники «труба в трубе» и т. д.
6. В зависимости от интенсивности случайных возмущений
действующих на объект, они делятся:
− на детерминированные (постоянные возмущения);
− стохастические (случайные возмущения).
7. По характеру установившегося значения выходной величины объекта при действии на его вход ступенчатого сигнала:
− объекты с самовыравниванием;
− без самовыравнивания.
9.1. Свойства объектов управления
Чтобы разработать систему управления, обеспечивающую требуемое качество переходных процессов, выбрать правильно закон регулирования и определить оптимальные параметры настройки регулятора необходимо знать свойства ОУ. Основные свойства объектов
управления перечислены ниже.
1. Самовыравнивание – свойство объекта самостоятельно
приходить к установившемуся равновесному состоянию после нанесения возмущения без воздействия регулятора.
По способности восстанавливать равновесное состояние после
нанесения на объект возмущающего воздействия объекты делят на
нейтральные, устойчивые, неустойчивые. Объекты без самовыравнивания называют нейтральными (астатическими). Примером нейтрального объекта является гидравлический резервуар, из которого
насосом откачивается жидкость. Производительность насоса не зависит от уровня жидкости в резервуаре.
Способность объекта прийти после нанесения возмущающего
воздействия в новое установившееся состояние без вмешательства
управляющего устройства
называется
устойчивым
самовыравниванием (саморегулированием). Объекты с таким самовыравниванием называют статическими, или устойчивыми.
82
В объектах с самовыравниванием ступенчатое входное воздействие изменяет выходную величину со скоростью, постепенно
уменьшающейся до нуля. Самовыравнивание является результатом
действия внутренней отрицательной обратной связи в объекте. Чем
больше величина самовыравнивания, тем меньше отклоняется управляемый параметр от состояния равновесия, имевшего место до возмущающего воздействия. Самовыравнивание способствует стабилизации управляемой величины в объекте и, таким образом, облегчает
работу управляющего устройства.
Примером объекта с устойчивым самовыравниванием является
резервуар со свободным истечением жидкости. При увеличении расхода жидкости поступающей в резервуар, уровень жидкости начинает расти с одновременным ростом гидростатического давления в
плоскости слива, что приведет к увеличению расхода жидкости на
выходе из резервуара и установится равенство входящей и выходящей жидкости из резервуара.
В объектах с отрицательным самовыравниванием изменение
выходного параметра, вызванное возмущением, приводит к еще
большему неравенству между притоком и стоком вещества или энергии, что в свою очередь вызывает дальнейшее изменение выходной
величины с постепенно увеличивающейся скоростью.
Примерами таких объектов могут служить аппараты, в которых
протекают автокаталитические реакции. Если процессом не управлять, то при положительном автокатализе реакция самоускоряется,
стремительно нарастая, а при отрицательном автокатализе скорость
реакции уменьшается вплоть до ее прекращения.
2. Емкость – характеризует степень влияния входной величины
на скорость изменения выходной.
Обычно под емкостью объекта понимают способность накапливать или сохранять вещество или энергию.
Накопление вещества или энергии возможно благодаря тому,
что в каждом объекте имеется сопротивление выходу потоку
вещества или энергии. Например, если бы не было гидравлического сопротивления сливного трубопровода на выходе из объекта, в
83
котором регулируется уровень, жидкость не могла бы накапливаться
в нем, и резервуар не обладал бы емкостью.
Количественно емкость объекта - С можно выразить как отношение входной величины - х, к скорости изменения выходной величины – у:
С = х/(dy/dt).
Емкость можно определить так же как количество вещества
или энергии, которое необходимо подвести к объекту, чтобы изменить выходную величину на единицу.
3. Запаздывание – это свойство инерционности объекта, которое выражается в том, что после нанесения возмущения выходная величина начинает изменяться не сразу, а только через некоторый промежуток времени.
Запаздывание затрудняет управлением процесса, и с ним нельзя
не считаться. Во многих системах автоматического управления (регулирования) приходится иметь дело со значительным запаздыванием, возникающим из-за транспортировки вещества, энергии через
трубопроводы или иные элементы оборудования. Запаздывание такого типа носит название транспортного запаздывания.
Наличие запаздывания в САУ усложняет задачу регулирования
технологического параметра в объекте. Поэтому запаздывание стремятся уменьшить: устанавливают чувствительный элемент первичного измерительного преобразователя и исполнительное устройство
системы (исполнительный механизм и регулирующий орган) как
можно ближе к объекту управления, применяют малоинерционные
первичные измерительные преобразователи и т. д. Любая СУ рассчитывается с учетом запаздывания.
9.2. Математические модели объектов управления
В реальных условиях часто точно неизвестны ни точка приложения возмущения, ни его характер. Известно, что лишь при
наличии достаточно точной математической модели объекта можно
спроектировать высококачественную систему управления этим объ84
ектом. Причем, согласно принципу Эшби, сложность управляющего
устройства должна быть не ниже сложности объекта управления.
Поэтому основной целью построения математической модели
объекта управления является определение структуры объекта, его
статических и динамических характеристик. Особенно важно определение структуры для многомерных и многосвязных объектов
управления. Определение структуры может быть сведено к определению порядка дифференциального уравнения описывающего объект. Кроме того, оцениваются входные сигналы и возмущения действующие на объект (их статистические характеристики, точки приложения, максимальные амплитуды). Значение этих характеристик позволяет выбрать структуру регулятора и рассчитать параметры его
настройки, ориентируясь также на критерий качества работы этой
системы.
Наряду с динамической частью в структуре объекта могут содержаться различные запаздывания в сигналах управления, измерения и состояния (рецикла).
В промышленных объектах под рециклом понимается возврат
части продукта с выхода объекта на его вход с целью повторной переработки. Наличие запаздывания объясняется конечной скоростью
распространения потоков информации в технологических объектах
(транспортное запаздывание).
Для получения математического описания объектов управления
также используются аналитические, экспериментальные и комбинированные методы.
Аналитические методы базируются на использовании уравнений описывающих физико-химические и энергетические процессы, протекающие в исследуемом объекте управления. Это, например, законы сохранения вещества и энергии (уравнения материального баланса). При получении таких описаний обычно оперируют с дифференциальными уравнениями в частных производных, т.к. переменные изменяются как во времени, так и в пространстве.
85
Реальные объекты занимают в пространстве какой-либо объем,
поэтому регулируемая величина зависит не только от времени, но и
от текущих координат точки измерения. Поэтому полное описание
объекта управления будет состоять из системы дифференциальных
уравнений с частными производными. При использовании точечного
метода измерения одним датчиком, система дифференциальных
уравнений с частными производными переходит в систему уравнений с обычными производными. Это существенно упрощает построение математической модели объекта, позволяя определить его
передаточную функцию. Однако при наличии множества датчиков,
распределенных например по длине объекта, может возникнуть необходимость использования множества управляющих сигналов (распределенное управление), что значительно усложняет построение математической модели.
Экспериментальные методы предполагают проведение серии
экспериментов на реальном объекте управления. Обработав результаты экспериментов, оценивают параметры динамической модели
объекта, задавшись предварительно ее структурой.
Экспериментальные методы определения динамических характеристик объектов управления делятся на два класса.
1. Методы определение временных характеристик объекта
управления.
2. Методы определение частотных характеристик объекта
управления.
Временные методы определения динамических характеристик
делятся, в свою очередь, на активные и пассивные.
Активные методы предполагает подачу на вход объекта пробных тестирующих сигналов, каковыми являются:
- регулярные функции времени (ступенчатый или импульсы,
гармонический сигнал);
- пробные сигналы случайного характера.
В зависимости от вида пробного сигнала выбирают соответствующие методы обработки выходного сигнала объекта управления.
Так, например, при подаче ступенчатого управляющего сигнала,
снимают кривую разгона объекта, а при подаче импульсного сигнала
снимают кривую отклика. Кривая отклика снимается для объектов,
не допускающих подачу на вход объекта ступенчатых сигналов.
86
Достоинствами активных методов являются:
- достаточно высокая точность получения математического
описания;
- относительно малая длительность эксперимента.
Следует учитывать, что активные методы, в той или иной степени, приводят к нарушению нормального хода технологического
процесса. Поэтому проведение эксперимента должно быть тщательно
спланировано.
В пассивных методах на вход объекта не подаются никакие
пробные сигналы, а лишь фиксируется естественное движение объекта в процессе его нормального функционирования. Полученные реализации массивов данных входных и выходных сигналов обрабатываются статическими методами. По результатам обработки получают
параметры передаточной функции объекта. Однако такие методы
имеют ряд недостатков:
- малая точность получаемого математического описания, (т. к.
отклонения от нормального режима работы малы);
- необходимость накопления больших массивов данных с целью повышения точности (тысячи точек);
- если эксперимент проводится на объекте, охваченном системой регулирования, то наблюдается эффект корреляции (взаимосвязи) между входным и выходным сигналами объекта через регулятор.
Такая взаимосвязь снижает точность математического описания.
Наиболее эффективными оказываются комбинированные методы построения математической модели объекта, когда, используя
аналитически полученную структуру объекта, ее параметры определяют в ходе натурных экспериментов.
87
9.2.1. Аналитический метод получения математического
описания объекта управления
В качестве примера рассмотрим аналитическую процедуру получения передаточной функции бака с жидкостью (рис. 47.)
Рис. 47. Объект управления - бак с жидкостью
В баке будет осуществляться стабилизация уровня жидкости на
номинальном значении ho = const. Регулирование притока Qn осуществляется через верхнюю трубу.
Слив жидкости идет через нижнюю трубу через установленный
на ней клапан Kл. Степень открытия клапана - α может изменяться от
0 до 1, устанавливая тем самым нужную величину стока. Площадь
сечения бака S.
Очевидно, что в установившемся режиме работы приток равен
стоку Qno = Qco.
Таким образом, управляющей величиной является приток жидкости, управляемой - величина уровня, а главным возмущением - изменение величины степени открытия клапана α.
Пусть приток жидкости в бак увеличился на ΔQn. В это случае
текущее значение притока будет равно Qn =Qno + ΔQn. Тогда за время
Δt уровень возрастет на величину Δh и составит h=ho+Δh. Очевидно,
что количество жидкости накопленной во времени должно равняться
количеству жидкости накопленной в объеме. Отсюда следует уравнение материального баланса
SΔh = Δt·(Qn - Qc).
88
Для анализа изменения уровня преобразуем это уравнение к виду:
∆h 1
= ⋅ (Qn − Qc ) .
∆t S
Из физики известно, что величина стока связана с уровнем соотношением
Qc = α ⋅ h .
Эта зависимость носит нелинейный характер. Для получения
линейного дифференциального уравнения объекта и его передаточной функции необходимо произвести линеаризацию нелинейности в
окрестности рабочей точки регулирования. Такой подход справедлив,
т. к. при использовании регулятора стабилизации, отклонения текущего значения уровня от заданного будут малыми.
Для линеаризации необходимо разложить эту функцию в ряд
Тейлора и отбросить все нелинейные члены:
Qc = α ⋅ h o +
α
2 ho
⋅ ∆h .
С учетом этой зависимости уравнение изменения уровня примет вид:
∆h 1
α
= ⋅ (Qno − ∆Qn − α ⋅ h o −
⋅ ∆h ) .
∆t S
2 ho
Беря предел, при Δt→0, произведя замену переменных h→у,
ΔQn → х, и учитывая, что Qno = α ⋅ h o получим дифференциальное
уравнение объекта:
dу 1
α
= ⋅(х −
⋅ у) .
dt S
2 ho
Известно, что инерционное звено первого порядка (апериодическое) с коэффициентом усиления - К и постоянной времени – Т
описывается дифференциальным уравнением:
у′(t ) = −
1
K
⋅ у (t ) + ⋅ х (t ) .
T
T
89
Тогда, из сравнения формул получим следующие выражения
для постоянной времени и коэффициента усиления бака с жидкостью:
T=
2 S ho
2 ho
, K=
.
α
α
Передаточная функция бака с жидкостью будет:
W (s ) =
K
.
Ts + 1
9.2.2. Экспериментальный метод получения передаточной функции
объекта управления по переходной кривой
При расчете настроек регуляторов локальных систем широко
используются упрощенные динамические модели промышленных
объектов управления. Использование моделей инерционных звеньев
первого или второго порядка с запаздыванием для расчета настроек
регуляторов обеспечивает в большинстве случает качественную работу реальной системы управления химико-технологическими процессами.
Экспериментальное нахождение модели ОУ заключается в определении характера реакции объекта на тот или иной вид возмущающего воздействия во времени (обычно на 1(t)). Наибольший практический интерес
представляет исследование динамических свойств объекта при возмущениях, вызванных изменением той величины, на которую действует или будет
действовать регулирующий орган.
Снимают временную характеристику следующим образом. Перед экспериментом регулируемый объект приводят в равновесное состояние и обеспечивают условия, при которых все входные и выходные величины постоянны. После стабилизации объекта быстрым перемещение регулирующего органа (клапана, заслонки и т. п.) вносят
возмущение, отмечая при этом вид, время и величину его. Затем
следят за изменением выходной величины, записывая ее
значения до тех пор, пока объект не придет в новое состояния
равновесия, т. е. пока выходная величина не примет
нового установившегося значения или скорость изменения выходной
величины не станет постоянной. На основании полученных данных
90
строят кривую в координатах: выходная величина – время, которая и
будет временной характеристикой объекта.
В зависимости от вида переходной характеристики, полученную кривую можно аппроксимировать соответствующим одним из
трех видов передаточной функции:
1. Для ОУ без самовыравнивания (рис. 48, а) передаточной
функцией интегрирующего звена с запаздыванием:
WОУ ( s ) =
K −τs
e .
s
2. Для ОУ с самовыравниванием, у которого переходная характеристика не имеет точки перегиба (рис. 48, б), передаточной функцией инерционного звена первого порядка с запаздыванием:
WОУ ( s ) =
K −τs
e .
Ts + 1
3. Для ОУ с самовыравниванием, у которого переходная характеристика имеет точку перегиба (рис. 48, в), передаточной функции
инерционного звена второго порядка с запаздыванием:
WОУ ( s ) =
K ⋅ e −τs
.
(T1s + 1) ⋅ (T2 s + 1)
В общем виде кривые разгона (КР) для ОУ с самовыравниванием и без него показаны на рис. 1.47.
у
у
у
ууст
ууст
0
0
t
t
t
в
а
б
Рис. 48. Переходные характеристики: а - ОУ без самовыравнивания;
б, в - ОУ с самовыравниванием
91
Если при подаче на вход ОУ ступенчатого воздействия была
получена переходная характеристика (рис. 49) без точки перегиба, то
для ее описания можно использовать передаточную функцию инерционного звена 1-го порядка с запаздыванием.
у
ууст
t
T
Рис. 49. Переходная характеристика объекта 1-го порядка
Требуется определить параметры передаточной функции:
К - коэффициент усиления; Т - постоянная времени; τ - запаздывание:
WОУ ( s ) =
K −τs
e .
Ts + 1
Так как экспериментально полученная кривая представляет собой экспоненту или близка к ней, то непосредственно из этой кривой
можно получить параметры К и Т.
Коэффициентом усиления К показывающая, во сколько раз
данное звено усиливает входной сигнал (в установившемся режиме),
и находится как отношение изменения выходной величины у(t) в установившемся режиме к изменению (скачку) входной величине х(t):
K=
∆у (t ) у уст (∞) − у (0)
=
,
∆х (t )
х (t1 ) − х (0)
Например, если при изменении подачи пара в теплообменник с
20 до 22 м3/ч, температура на выходе поднялась с 90 до 100 оС, то
коэффициент усиления объекта будет:
K=
92
о
100 − 90
С⋅ч
=5 3 .
22 − 20
м
Постоянная времени Т для рассматриваемой передаточной
функции 1-го порядка Т определяется просто: сначала проводится касательная к точке перегиба, затем находятся точки пересечения с
осью времени и асимптотой yуст. Время Т определяется как интервал
времени между этими точками.
Запаздыванием τ находится как промежуток времени от начала
координат у(0) до момента изменения входной величины у(t)≠ у(0).
Для проверки удовлетворительности аппроксимации по найденным значениям нужно построить кривую, подставив полученные
значения К, Т и τ в уравнение передаточной функции. Если расхождения между построенной кривой и экспериментально снятой временной характеристикой незначительны (до 5 %), то аппроксимацию
следует считать удовлетворительной. В случае же больших расхождений можно несколько изменить значение постоянной времени Т в
ту или иную сторону и еще раз построить кривую при новом значении Т. После двух-трех таких изменений можно получить достаточное совпадение. На точность определения величины Т влияет правильность проведения касательной к кривой в начальной или любой
другой точке.
Так же постоянную времени Т можно определить как отрезок
времени от момента времени изменения входной величины у(t)≠ у(0)
до времени достижения выходной величиной значения у(t) =
у(0)+0,632·yуст.(∞).
Если же кривая имеет вид, показанный на рис. 50, то исследуемый объект, относится к более сложным объектам и будет аппроксимироваться передаточной функцией второго порядка.
93
у
ТС
ууст
0
ТА
t
Рис. 50. Переходная характеристика объекта 2-го порядка
Метод определения параметров моделей второго порядка был
разработан в 1948 году Ольденбургом и Сарториусом для передаточной функции вида:
WОУ ( s ) =
K ⋅ e −τ ⋅ s
.
(T1s + 1) ⋅ (T2 s + 1)
Коэффициент усиления К и τ определяется аналогично модели
первого порядка. Постоянные времени Т1 и Т2 определяются по отношению времен TA и TC. Времена TA и TC. полученные из графика
реакции системы на скачкообразное возмущение, связаны с T1 и T2
передаточной функцией WОУ ( s) следующими выражениями:
Т А = Т1 (Т 2 / T1 ) , где n = Т 2 / (Т 1 − Т 2 );
Т С = Т1 + Т 2 .
Аналитическое решение получения T1 и T2 возможно, но достаточно сложно, поэтому в методе Ольденбурга-Сарториуса используется графический способ нахождения постоянных времени, как точки
n
n
пересечения графиков 1 =
Т1 Т 2 / Т А
Т
Т
Т
и С = 1 + 2 .
Т А T1 / Т А
Т А Т А TА
Так же параметры передаточной функцией WОУ ( s) второго порядка можно найти по методу Андерсона и графоаналитическому
методу.
94
В случае, если на графике между точкой перегиба имеется вогнутость, определяется дополнительное запаздывание τд, которое
прибавляется к основному: τ = τ + τд.
Для определения параметров передаточной функции ОУ описываемой n-звеньями с одинаковой постоянной времени T по переходной характеристики, используется метод В. Стрейца.
10. ОСНОВНЫЕ ЗАКОНЫ РЕГУЛИРОВАНИЯ
В составе структуры САУ содержится управляющее устройство,
которое называется регулятором и выполняет основные функции управления, путем выработки управляющего воздействия – u(t). Чаще всего
автоматический регулятор (АР) включается перед объектом управления
(ОУ) и воздействует на него через исполнительное устройство (ИУ), как
показано на схеме (рис. 51):
f(t)
х(t)
e(t)
-у
АР
uр(t)
ИУ
uиу(t)
ОУ
y(t)
ос(t)
Рис. 51. Структурная схема САУ
Задача системы управления состоит в том, чтобы подавить действие внешнего возмущения f(t) и обеспечить быстрые и качественные переходные процессы. К сожалению, эти задачи часто противоречивы. Фактически нужно скорректировать систему управления так,
чтобы она имела нужные передаточные функции по возмущению
(Wв(s), от входа f к выходу y) и по задающему воздействию (Wу(s) , от
входа x к выходу y). Если для этого используется только один регулятор Р, то такую систему называют системой с одной степенью свободы (регулирования).
95
Под регулированием (управлением) понимается алгоритм или
функциональная зависимость, определяющая управляющее воздействие u(t) на объект в зависимости от ошибки - е, задания –х(t) и возмущения - f(t):
u(t) = F(t , x, f).
Закон регулирования определяет вид этой зависимости без учёта инерционности элементов регулятора. Именно закон регулирования заложенный в техническое устройство - автоматический регулятор, определяет основные качественные и количественные характеристики всей систем управления.
Законы регулирования в зависимости от вида математического
описания алгоритма делят на нелинейные и линейные.
Нелинейные законы могут быть функциональные, логические,
параметрические, оптимизирующие и др.
10.1. Позиционные законы регулирования
Наибольшее распространение среди нелинейных законов получили релейные законы. Существуют двухпозиционный и трехпозиционный нелинейные законы регулирования.
Автоматические регуляторы, у которых при непрерывном изменении входной величины регулирующий орган занимает ограниченное число определенных, заранее известных положений, называется позиционными. Входной величиной позиционного регулятора
является ошибка- е(t) (рассогласование между заданием и текущим
значением регулируемой величины), а выходной - управляющее воздействие u(t).
Алгоритм двухпозиционного закона регулирования записывается следующим образом:
u , при е( t ) ≤ 0;
u = min
umax , при е(t ) > 0.
Выходная величина двухпозиционного регулятора может занимать только два значения: минимальное (закрыт РО) или максимальное (открыт РО) (рис. 52, а).
96
У трехпозиционных регуляторов помимо двух крайних положений (открыто и закрыто) регулирующий орган имеет ещё одно промежуточное (среднее) положение, что способствует более плавному изменению регулируемой величины и сокращению числа срабатываний РО в единицу времени.
Алгоритм трехпозиционного закона регулирования имеет следующий вид:
umin , при e < −eН ;
u = 0, при - eН < e < eН ;
u , при e > e .
max
Н
Графическое представление трехпозиционного закона регулирования показано на рис 52, б.
u
u
umax
umaх
е
e
−eн
eн
umin
а
umin
б
Рис. 52. Релейные законы регулирования: а - двухпозиционный;
б - трехпозиционный
При трехпозиционном законе регулирования величина еН определяет зону нечувствительности регулятора. Преимущество трехпозиционного регулирования перед двухпозиционным: возможность
прекращения автоколебательного процесса и достижение равновесного состояния, если регулируемая величина находится в пределах
зоны нечувствительности, т. е. если соблюдается неравенство:
-e Н < e < e Н .
97
Применение релейных законов позволяет при высоком быстродействии получить такие результаты, которые невозможно осуществить с помощью линейных законов.
В практике автоматизации химико-технологических процессов,
однако в подавляющем большинстве случаев, применяются регуляторы с линейными унифицированными законами (алгоритмами) регулирования.
К линейным законам регулирования относятся:
− пропорциональный (П (P));
− интегральный (И (I));
− дифференциальный (Д (D));
− совместные комбинации этих законов.
10.2. Пропорциональное регулирование
Пропорциональный закон является простейшим линейным законом регулирования и регулятор в этом случае называют Прегулятором.
Пропорциональный закон регулирования имеет вид:
u(t) = k∙е(t).
По существу, это есть усилитель с передаточной функцией:
WП(s) = kП.
где kП - коэффициент пропорциональности.
В АСР с П-регулятором перемещение регулирующего органа
осуществляется пропорционально отклонению регулируемой величины от заданного значения. П-регулирование позволяет уменьшить
установившуюся (статическую) ошибку в k+1 раз.
Основным достоинством П-регулятора является простота. С
помощью него можно управлять любым устойчивым объектом, однако он дает относительно медленные переходные процессы и ненулевую статическую ошибку (рис. 53).
98
y
g
0
t
Рис. 53. Переходной процесс регулирования П- регулятора
П-регулятор дает невысокую точность регулирования для объектов с плохими динамическими свойствами. При различных нагрузках (возмущениях) регулируемая величина удерживается Прегулятором на разных значениях. Объясняется это тем, что перемещение регулирующего органа ИУ в новое положение, соответствующее новой нагрузке, может быть произведено только за счет отклонения регулируемой величины. Это явление получило название остаточной неравномерности.
10.3. Интегральное регулирование
Интегральный закон регулирования и соответствующий И- регулятор реализует следующую зависимость:
u (t ) =
1
TИ
t
∫ е(t )dt ,
0
Передаточная функция И-регулятора:
WИ(s) = kИ /s,
kИ=1/Т И,
где ТИ - постоянная времени интегрирования; kИ - интегральный коэффициент усиления.
99
y
х
0
t
Рис. 54. Переходной процесс регулирования И- регулятора
Интегратор выдает сигнал, пропорциональный накопленной
ошибке, поэтому переходный процесс несколько замедляется (рис.
54). Однако за счет интегрального канала обеспечивается нулевая
ошибка в установившемся состоянии при ступенчатом возмущении и
ступенчатом изменении задающего сигнала. И-регулирование позволяет исключить статическую ошибку в системе, т.е. система будет
астатической по отношению к задающему воздействию х(t). Вместе с
тем И - регулятор вызывает уменьшение устойчивости переходного
процесса и системы в целом.
10.4. Дифференциальное регулирование
Дифференциальный закон регулирования и соответствующий
Д-регулятор реализует следующую зависимость:
u(t ) = Т Д
de(t )
.
dt
Передаточная функция Д-регулятора:
WД(s) = kД · s, kД= Т Д ,
где kД - постоянная времени дифференцирования.
Дифференциальный закон используется для ускорения
переходных процессов. Д-закон генерирует управляющее воздействие только при изменении регулируемой величины, т. е. реагирует на
100
скорость изменения ошибки (на тенденцию её изменения). Главный
недостаток дифференциального канала - большое влияние высокочастотных помех, например, шумов измерений.
Регулирование с использованием одного канала, чувствительного к производной сигнала не имеет самостоятельного значения, т.
к. сигнал управления в установившемся режиме будет равен нулю.
Поэтому обязательно наличие параллельного либо П, либо И - канала, а чаще обоих.
В промышленных технических регулирующих устройствах в
чистом виде используются только алгоритмы П и И - законов регулирования, а в основном для управления объектов используется сочетание законов регулирования, объединяя тем самым достоинства отдельных законов:
− ПИ - пропорционально интегральный (изодромный);
− ПД - пропорционально дифференциальный;
− ПИД - пропорционально интегральный дифференциальный.
10.5. Изодромное регулирование (ПИ – закон).
Регулирование с использованием Д - закона
Когда желательно сочетать в установившемся режиме высокую точность интегрального регулятора с большим быстродействием в переходном режиме пропорционального регулятора, используют пропорционально-интегральный (изодромный) закон регулирования. В этом случае ПИ - регулятор реализует зависимость:
t
∫
u ( t ) = k П ⋅ е( t ) + k И ⋅ е(t )dt .
0
Передаточная функция ПИ-регулятора:
WПИ ( s ) = k П +
kИ
.
s
101
Мощным средством улучшения поведения САР в переходном
режиме является введение в закон регулирования производной от
ошибки. Часто эта производная вводится в пропорциональный закон
регулирования. В этом случае имеем пропорциональнодифференциальный закон регулирования, регулятор является ПДрегулятором, который реализует зависимость:
u (t ) = k ⋅ е(t ) + Т д ⋅ de (t ) / dt.
Наличие параллельного Д-канала в регуляторе ПД повышает
быстродействие системы и снижает ошибку в динамике.
Кроме ПИ и ПД регуляторов, часто на практике используют
ПИД-регуляторы, которые реализуют пропорционально-интегральнодифференциальный закон регулирования:
t
u ( t ) = kе( t ) +
1
de(t )
е( t )dt + Т д
.
Tи 0
dt
∫
Передаточная функция ПИ-регулятора:
WПИ ( s ) = k П + k И / s + k Д s .
ПИД - регулятор сочетает в себе достоинства всех трех типовых регуляторов (рис. 55).
y
а
g
б
0
t
Рис. 55. Переходной процесс регулирования ПИД- регулятора: а – по
управлению; б – по возмущению
102
Из-за дифференциальной составляющей ПИД-регуляторы обладают повышенной чувствительностью. Они обеспечивают качественное регулирование технологических процессов, но требуют повышенного внимания к себе при эксплуатации. Поэтому имеют
меньшее распространение в промышленности, чем ПИ-регуляторы.
11. АЛГОРИТМЫ ЦИФРОВЫХ СИСТЕМ УПРАВЛЕНИЯ
Законы регулирования могут быть реализованы в непрерывном
(аналоговом) виде или в цифровом.
В настоящее время наблюдается тенденция вытеснения аналоговых систем управления цифровыми. Объясняется это широкими возможностями цифровых систем по реализации самых совершенных алгоритмов регулирования, что в свою очередь, гарантирует получение
высокой точности и хорошего быстродействия в замкнутой системе
непосредственного цифрового управления.
Цифровые алгоритмы управления являются важнейшей составной частью программного обеспечения микропроцессорных контроллеров и управляющих вычислительных машин (УВМ).
Наиболее распространенными алгоритмами цифрового управления являются ПИ и ПИД - законы. При правильной настройке эти
алгоритмы обеспечивают достаточно хорошее качество управления
для большинства объектов промышленной технологии.
Рассмотрим процедуру вывода алгоритма цифрового ПИД- регулятора из соответствующего непрерывного закона:
t
∫
u ( t ) = k П е(t ) + k И е(t ) dt + k Д
0
de(t )
.
dt
Запишем это уравнение в конечных разностях, путем замены
непрерывной величины на дискретную: t = n·T, где
n = 1,2,3, … номер периода квантования, T - величина периода квантования (шага
дискретизации).
103
Операция замены непрерывной функции дискретной
f[nТ]=f(t)t=nT, показана на рис. 56. Значения дискретной (решетчатой)
функции f[nT] (сокращенная запись f[nT]) определены только в дискретные моменты времени.
Рис. 56. Формирование дискретной функции
С учетом формул конечно-разностного преобразования получаем:
e[n] − e[n - 1]
.
T
i =0
Для малых периодов дискретизации T → 0 уравнение непрерывного закона u(t) может быть преобразовано в разностное u[n] без
существенной потери в точности.
На практике вместо вычислений абсолютных значений управляющего сигнала удобней вычислять его приращения Δu[n] на каждом такте. В этом случае становится возможным использовать этот
алгоритм для управления объектами, оснащенными как пропорциональным так и интегрирующими исполнительными механизмами. В
результате получаем так называемый скоростной алгоритм управления, полностью эквивалентный исходному:
n
u[n] = k П ⋅ е[n] + k И ⋅ ∑ е[i] ⋅T + k Д ⋅
∆u [n ] = u[n ] − u[n − 1] = k П ⋅ (e[n ] − e[n − 1]) + k И ⋅ T ⋅ (e[n ] − e[n − 1]) +
+
kД
T
104
[e[n ] − e[n − 1] − (e[n − 1] − e[n − 2])] .
Приведя подобные члены, получим алгоритм цифрового ПИДрегулятора:
u [n ] = u [n − 1] + g 0 e[n ] + g1e[n − 1] + g 2 e[n − 2 ],
где gо, g1, g2 – настроечные параметры регулятора.
gо = kП + kИ Ти + kД/Т;
g1 = -kП - kИ Ти - 2·kД /Т;
g2 = kД/Т.
12. ОПРЕДЕЛЕНИЕ ОПТИМАЛЬНЫХ НАСТРОЕК РЕГУЛЯТОРОВ
Задача проектировщика АСР состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надежности обеспечивал бы заданное качество регулирования.
Для того чтобы выбрать тип регулятора и определить его настройки необходимо знать:
- статические и динамические характеристики объекта управления;
- требования к качеству процесса регулирования;
- показатели качества регулирования для серийных регуляторов;
- характер возмущений, действующих на процесс регулирования.
В зависимость от условий процесса могут быть выбраны релейные, непрерывные или дискретные (цифровые) типы регуляторов, в
обычном или взрывопожарном защитном типе исполнения.
Выбор типа регулятора обычно начинается с простейших двухпозиционных регуляторов и может заканчиваться самонастраивающимися микропроцессорными регуляторами.
Однако в соответствии с требованиями технологического регламента многие объекты не допускают применения релейного управляющего воздействия, поэтому для управления химикотехнологическими объектами в основном используются линейные законы регулирования: П, И, ПИ, ПИД.
При выборе данных законов регулирования необходимо учитывать особенности ОУ.
105
П-регуляторы могут применяться для управления объектами с
самовыравниванием и без самовыравнивания при небольших изменениях нагрузок, если технологическим режимом допустимо остаточное отклонение параметра от заданного значения (статическая
ошибка).
И-регуляторы не могут применяться на объектах, не обладающих самовыравниванием. Система, состоящая из объекта управления
без самовыравнивания и И-регулятора, неустойчива. Поскольку быстродействие И-регулятора невелико, самовыравнивание объекта
должно быть значительным, запаздывание небольшим, а изменения
нагрузок плавными. Как правило, в системах управления технологическими процессами И-регулятор самостоятельно не применяется.
ПИ-регуляторы применяют для регулирования как устойчивых, так и нейтральных объектов при больших, но плавных изменениях нагрузок, когда требуется высокая точность регулирования в
статическом режиме (когда остаточные отклонения недопустимы).
ПД-регуляторы и ПИД-регуляторы (регуляторы с предварением) обеспечивают относительно высокое качество регулирования
объектов, обладающих большим переходным запаздыванием (например, теплообменных и массообменных аппаратов), а также в тех случаях, когда нагрузка в объектах регулирования изменяется часто и
быстро.
Использование регуляторов с линейными законами требует определения их настроек. Регулятор, включенный в АСР, может иметь
несколько настроек, каждая из которых может изменяться в достаточно широких пределах. При этом при определенных значениях настроек система будет управлять объектом в соответствии с технологическими требованиями, при других может привести к неустойчивому состоянию. Поэтому возникает задача определить настройки,
соответствующие устойчивой системе, и выбрать из них оптимальные.
Задача поиска оптимальных параметров настройки регулятора
называется задачей оптимизации.
Оптимальными настройками регулятора называются настройки, которые соответствуют минимуму (или максимуму) какого-либо
показателя качества.
106
Сложность и трудоемкость задачи оптимизации в первую очередь зависит от закона регулирования и числа искомых параметров.
В табл. 2. сведены параметры линейных регуляторов. Видно, что для
П- и И-регуляторов задача динамической оптимизации является однопараметрической, для ПИ-регуляторов- двухпараметрической, а
для ПИД – трехпараметрической.
Таблица 2
Наименование
алгоритма
П
И
ПИ
ПИД
KП
+
+
+
Настроечный параметр
KИ
+
+
+
KД
+
На рис. 57, показаны характерные виды переходных процессов
в АСР при подаче ступенчатого возмущения по каналу регулирования при оптимально настроенных на один и тот же технологический
объект параметрах регуляторов.
Рис. 57. Сравнительная характеристика переходных процессов в АСР
с различными оптимально настроенными алгоритмами регуляторов
Самый простой по структуре регулятор с П-алгоритмом является достаточно быстродействующим, дающим сравнительно небольшие отклонения, но недостаток его в том, что он не полностью устраняет отклонение регулируемой величины. Это обусловлено его передаточной функцией, при которой в замкнутой АСР при t
→ ∞, y(t) →yуст.
107
Переходный процесс в АСР с И-регулятором самый инерционный. Это обусловлено инерционностью И-звена. Отклонение регулируемой величины в АСР с И-регулятором самое большое. Однако по
сравнению с П-регулятором И-регулятор имеет достоинство в том,
что он будет работать пока отклонение не станет равным нулю.
ПИ-регулятор сочетает в себе достоинства П- и И-регуляторов.
Отклонения в АСР с этим регулятором среднее между П- и Ирегуляторами.
ПИД-регулятор отличается высоким качеством работы. Отклонения в АСР с ПИД-регулятором снижаются примерно на
80 % по
сравнению с И- регуляторами. Однако недостатком этого регулятора
является его высокая чувствительность. В данном случае это качество является недостатком, так как любая незначительная ошибка в установке параметров регулятора может привести к потере устойчивости АСР. Это свойство ПИД-регулятора требует качественного обслуживания его в работе, и нередко, ограничивает его применение.
Требования к показателям качества устанавливаются непосредственно, исходя из технологических параметров. Чаще всего накладываются требования на точность, время регулирования (минимум) и
степень затухания (Ψ ≥ Ψзад).
Однако, изменяя настройки таким образом, чтобы увеличить, например степень затухания, мы можем прийти к слишком большому
времени регулирования, что нецелесообразно. И наоборот, стремясь
уменьшить время регулирования, мы получаем более колебательные
процессы с большим значением Ψ и снижение точности регулирования.
Зависимость Ψ от tp в общем случае имеет вид, изображенный
на графике рис. 58.
1
Ψ
tp
Рис. 58. Зависимость степени затухания от времени регулирования
108
Поэтому для определения оптимальных настроек регуляторов
разработаны специальные математические методы:
− метод D-разбиения;
− формульный метод;
− метод расчета по номограммам;
− расчет настроек по частотным характеристикам;
− градиентный метод (метод Гаусса-Зайделя) и т. д.
Для значительного числа промышленных объектов управления
отсутствуют достаточно точные математические модели, описывающие их статические и динамические характеристики. В то же время
проведение экспериментов по снятию этих характеристик с объектов
весьма дорого и трудоемко. В этом случае может использоваться экспериментальный метод настройки регулятора.
Экспериментальный метод настройки регуляторов не требуют
знания математической модели объекта. Однако предполагается, что
система смонтирована и может быть запущена в работу, а также существует возможность изменения настроек регулятора. Таким образом, можно проводить некоторые эксперименты по анализу влияния
изменения настроек на динамику системы. В конечном итоге гарантируется получение хороших настроек для данной системы регулирования.
13. АНАЛИЗ СИСТЕМ УПРАВЛЕНИЯ
Требования предъявляемые к системе управления, зависят прежде всего от решаемой задачи. Так в задаче стабилизации наиболее
важны свойства установившегося режима. Для следящих систем в
первую очередь нужно обеспечить высокое качество переходных
процессов при изменении задающего сигнала.
В целом можно выделить четыре основных требования:
− устойчивость – система должна оставаться устойчивой на
всех режимах, не должна идти «вразнос»;
− качество переходных процессов – при смене заданного значения система должна переходить в нужное состояние по возможности быстро и плавно;
109
− точность – в установившемся режиме система должна
поддерживать заданное значение выхода системы, причем ошибка
(разница между заданным и фактическим значением) не должна превышать допустимую;
− робастность – система должна сохранять устойчивость и
приемлемое качество даже в том случае, если динамика объекта и
свойства внешних возмущений немного отличаются от тех, что использовались при проектировании.
13.1. Устойчивость САУ
Под устойчивостью понимается способность динамических
систем возвращаться в исходное установившееся состояние после
снятия внешних воздействий (возмущений) или переходить в другое
равновесное состояние.
Устойчивость является внутренним свойством динамической
системы и не зависит от вида и точки внесения возмущения. Устойчивость не является абсолютным свойством системы и зависит от еѐ
параметров. Изменяя параметры, можно вывести систему из устойчивого состояния и наоборот.
Если у системы в результате внешнего воздействия возникают колебания со все возрастающей амплитудой или происходит
монотонное увеличение ошибки е, то система называется неустойчивой.
Понятие устойчивость наглядно иллюстрирует рис. 59, на котором представлена физическая система шар - поверхность.
Рис. 59. Иллюстрация понятия «устойчивость»
Шарик на рис. 59 находится в устойчивом положении А и если
его немного сдвинуть с места, он обратно скатится в ямку. Если шарик сильно отклонить от равновесия, он может перевалить через горку и устойчивость нарушится. В положениях Б и В шарик также на110
ходится в положении равновесия, но оно неустойчиво, так как при
малейшем сдвиге в сторону шарик скатывается с вершины. В положениях Г и Д равновесие шарика нейтральное, при небольшом воздействии он перейдет в новом положение. При этом говорят, что система находится на границе устойчивости.
Как видно из рисунка, положение равновесия может быть устойчиво при малых отклонениях (система устойчива «в малом») и
неустойчиво при больших («в большом»). Когда система возвращается в состояние равновесия при любых начальных отклонениях, ее называют устойчивой в целом, т. е. в малом и большом.
Об устойчивости системы можно судить по видам переходных
процессов (рис. 60).
Практически все системы управления являются нелинейными,
а линейные системы управления следует рассматривать как приближенные, линеаризованные модели нелинейных систем.
Линеаризация производится относительно заданного номинального (равновесного) режима y(t), называемого в теории устойчивости невозмущенным движением. Невозмущенное движение y(t) нелинейной системы называется асимптотически устойчивым, если
существует некоторая окрестность вокруг невозмущенного движения
такая, что любое возмущенное движение y(t), начинающееся в момент tо окончания действия возмущения в этой окрестности, в дальнейшем не выходит из этой окрестности и y(t) → yо(t) при t → ∞.
Возникает вопрос: можно ли судить об асимптотической устойчивости невозмущенного движения нелинейной системы на основании исследования устойчивости ее линеаризованной модели?
Впервые этот вопрос был поставлен и решен A.M. Ляпуновым в 1892
г. в его диссертационной работе.
111
у(t)
1
g
у(t)
а
д
g
2
0
0
у(t)
t
у(t)
б
t
г
1
g
0
2
t
0
t
Рис. 60. Примеры переходных процессов: а - устойчивые колебательные
процессы: 1- по управлению, 2 – по возмущению; б – автоколебательный
процесс (система на грани устойчивости, это неустойчивый
процесс);
в – устойчивые апериодические сходящиеся процессы; г – неустойчивые
процессы: 1 – апериодический расходящийся, 2 - колебательный
Система называется устойчивой по Ляпунову в положении равновесия x*, если при начальном отклонении от положения равновесия x* не более, чем на δ, траектория движения отклоняется от x* не
более, чем на ε , причем для каждого ε можно найти соответствующее ему δ(ε ) :
x0 − x * < δ ⇒ x (t ) − x * < ε при всех t > 0.
Фактически это означает, что чем меньше начальное отклонение, тем меньше траектория движения отклоняется от положения
равновесия.
Если кроме того вектор состояния стремится к положению равновесия, то есть
x ( t ) − x * → 0 при t → ∞,
система называется асимптотически устойчивой в положении равновесия x*.
Положение равновесия неустойчиво, если для него не выполняется условие устойчивости Ляпунова. Это значит, что существует
112
такое ε > 0 , что траектория x(t) выходит за границы области
x(t ) − x* < ε при сколь угодно малом отклонении начального состояния x0 от положения равновесия x*.
Геометрическая трактовка условия устойчивости по Ляпунову: если при возмущениях, не выведших точку Во за сферу λ, возмущенное движение будет таково, что точка В1 не выйдет за границу
сферы А, то оно устойчиво (рис. 61).
х2
В1
λ
х1
Во
А
х3
Рис. 61. Геометрическая трактовка условия устойчивости по Ляпунову
Оценить устойчивость системы можно методом прямого эксперимента на работающем объекте, но это не всегда приемлемо, даже
бывает опасно, а на уровне проектирования объектов просто невозможно. Поэтому в теории автоматического управления разработаны
специальные математические методы оценки устойчивости, которые
используют аналитическое описание систем управления виде линейных дифференциальных уравнений. Эти методы косвенные и известны как критерии устойчивости. Они позволяют также оценить влияние параметров системы на устойчивость. Все критерии устойчивости делятся:
- на корневой;
- алгебраические;
- частотные.
113
Корневой критерий является необходимым условием устойчивости отдельных звеньев и разомкнутых систем, но достаточным
только для систем описываемых ДУ 1- и 2-го порядков. Алгебраические критерии позволяют оценивать устойчивость замкнутых систем
без запаздывания по коэффициентам характеристического уравнения
любого порядка. Частотные критерии применяются к замкнутым системам с запаздыванием и позволяют определить устойчивость системы на основе анализа соответствующих частотных характеристик.
13.1.1. Корневой критерий
Корневой критерий определяет устойчивость системы по корням характеристического уравнения. Путем приравнивания знаменателя передаточной функции к нулю можно получить характеристическое уравнение:
a0 s n + a1s n −1 + ... + an = 0.
Корни характеристического уравнения si могут быть как действительные, так и комплексные, и для определения устойчивости откладываются на комплексной плоскости (рис. 62). Символом обозначены корни уравнения.
4
5
Im
3
6
1
0
Re
2
5
4
Рис. 62. Варианты расположение корней характеристического уравнения на
комплексной плоскости
Корни si=α± jω характеристического уравнения могут быть:
- действительные: положительные (корень № 1); отрицательные
(2,6); нулевые (3);
- комплексные: комплексные сопряженные (4); чисто мнимые (5).
114
По кратности корни бывают одиночные (1, 2, 3) и сопряженные
(4, 5).
Корневой критерий формулируется следующим образом:
Линейная АСР устойчива, если все корни характеристического
уравнения лежат в левой полуплоскости (имеют отрицательную вещественную часть). Если хотя бы один корень находится на мнимой
оси, которая является границей устойчивости, то говорят, что система находится на границе устойчивости. Если хотя бы один корень
находится в правой полуплоскости (не зависимо от числа корней в
левой), то система является неустойчивой.
Чтобы корни характеристического уравнения имели отрицательные
вещественные части, необходимо чтобы все его коэффициенты аi были положительны. Однако это условие является достаточным только
для систем описываемых ДУ 1- и 2-го порядков. При n > 2 это условие недостаточно, если полином имеет комплексно-сопряженные
корни.
Пример.
Пусть передаточная функция системы имеет вид:
3s + 4
.
W ( s) = 3
2
s + 2s + 2.25s + 1.25
Характеристическое уравнение: s3 + 2s2 + 2,25s + 1,25 = 0.
Корни: s1 = -1;
s2 = -0,5 + j;
s3 = -0,5 - j.
Так как все действительные корни и действительные части комплексных корней отрицательны, следовательно, система устойчива.
13.1.2. Алгебраические критерии устойчивости
Наибольшее распространение среди алгебраических критериев
устойчивости получил критерий Гурвица (швейцарский математик,
1885).
В основе этого критерия лежит анализ коэффициентов характеристического уравнения динамической системы. Из коэффициентов
характеристического уравнения:
a0 s n + a1 s n-1 + ... + an-1 s + an = 0 ,
115
составляется матрица главного определителя Δ:
a1
a0
Δ= 0
a3
a2
a1
a5 K
a4 K
a3 K
0
0
0
L L L L L
0 0 0 K an
По диагонали матрицы от верхнего левого угла записываются
по порядку все коэффициенты характеристического уравнения, начиная с а1. Затем каждый столбец матрицы дополняется таким образом,
чтобы вверх от диагонали индексы коэффициентов увеличивались, а
вниз уменьшались.
Определение критерия. Для устойчивой системы необходимым и
достаточным условием является то, чтобы главный определитель и все
n диагональные миноры получаемые из квадратной матрицы коэффициентов должны быть положительны, при a0 > 0.
Матрицы, для расчета диагональных миноров, получают из исходной путем последовательного исключения последних столбца и
строки:
a1 a3
и т. д.
>0
a0 a2
Если хотя бы один определитель будет равен нулю, то система
будет находится на границе устойчивости.
Если хотя бы один определитель будет отрицателен, то система
неустойчива, не зависимо от числа положительных или нулевых определителей.
Вычисление диагональных миноров невысоких порядков
( ∆1 ...∆ 5 ) не представляет значительного труда, и устойчивость конкретной системы может быть легко определена вручную.
∆1 = a1 > 0;
∆2 =
Пример.
Дана передаточная функция замкнутой системы:
Wзс ( s ) =
116
2 s 3 + 9 s 2 + 6s + 1
.
2 s 4 + 5s 3 + 10s 2 + 6 s + 1
Требуется определить устойчивость замкнутой системы по критерию
Гурвица.
Для этого определяется характеристическое уравнение замкнутой
системы:
2s4 + 5s3 + 10s2 + 6s + 1 = 0.
Поскольку максимальная степень характеристического уравнения
замкнутой системы равна n = 4, то матрица будет иметь размер 4×4.
Коэффициенты характеристического уравнения равны: а0 = 2,
а1 =
5, а2 = 10, а3 = 6, а4 = 1.
Определитель Гурвица имеет вид:
5 6 0 0
2 10 1 0
∆=
0 5 6 0
0 2 10 1
Диагональные определители будут:
Δ1 = 5 > 0,
5 6
∆ 2 =
= 5 ⋅ 10 − 2 ⋅ 6 = 38 > 0 ,
2 10
5 6 0
∆ 3 = 2 10 1 = (5 ⋅ 10 ⋅ 6 + 6 ⋅ 1 ⋅ 0 + 2 ⋅ 5 ⋅ 0) −
0 5 6
− (0 ⋅ 10 ⋅ 0 + 5 ⋅ 5 ⋅ 1 + 2 ⋅ 6 ⋅ 6) = 209 > 0
Δ4 = 1· Δ3 = 1·209 > 0.
Поскольку все определители положительны и a0 > 0, то АСР
устойчива.
К алгебраическим критерия относят также критерии Рауса
(1877), Льенара—Шипара (1914) и др.
13.1.3. Частотные критерии устойчивости
Алгебраические критерий достаточно просты для исследования
устойчивости динамических систем, имеющих характеристические
уравнения невысокого порядка. Однако для уравнений высших по117
рядков их применение становится затруднительным, а если в системе
имеются запаздывающие звенья Wс ( s ) = W ( s ) ⋅ e −τs , то и вовсе невозможно, так как в этом случае характеристическое уравнение становится трансцендентным.
В подобных случаях оказывается более удобным исследовать
устойчивость системы, применяя частотные критерии, обладающие
большей наглядностью в силу простой геометрической интерпретации. Частотные критерии можно разделить на две группы: первые
предназначены для исследования устойчивости замкнутой системы –
критерий Михайлова (он применяется обычно для сложных систем);
вторые – для исследования устойчивости замкнутой системы по частотной характеристике разомкнутой системы – критерий Найквиста
(используется, когда размыкание системы приводит к существенным
упрощениям частотной функции).
Критерий А.В. Михайлова (советский учёный, 1938) предполагает построение годографа (АФЧХ) на комплексной плоскости.
Для построения годографа, из характеристического уравнения путем
подстановки вместо s→jω получают аналитическое выражение вектора D(jω):
D ( jω ) = a0 ( jω ) n + a1 ( jω ) n −1 + ... + an .
Данное уравнение является комплексным и может быть представлено в виде:
D( jω ) = Re(ω ) + j Im(ω ) .
На комплексной плоскости строится по Re(ω) и Im(ω) (изменяя
частоту ω от 0 до ∞ ) годограф Михайлова D(jω).
Определение критерия. Для устойчивой АСР необходимо и
достаточно, чтобы годограф Михайлова (рис. 63), начинаясь при ω =
0 на положительной вещественной полуоси, обходил последовательно в положительном направлении (против часовой стрелки) при возрастании ω от 0 до ∞ n квадрантов, где n - степень характеристического полинома.
118
Im
Уст.
0
Re
Неуст.
Граница уст.
Рис. 63. Годограф Михайлова
Если годограф Михайлова проходит через начало координат, то
говорят, что система находится на границе устойчивости.
Пример.
Пусть характеристическое уравнение замкнутой системы:
2s4 + 5s3 + 10s2 + 6s + 1 = 0.
Подставим в характеристическое уравнение вместо s→jω:
D(jω)= 2(jω)4+5(jω)3+10(jω)2+6(jω)+1=2ω4-5jω3-10ω2+6jω+1.
Выделим действительную и мнимую части:
Re(ω) = 2ω4-10ω2+1;
Im(ω) = -5ω3+6ω.
Построим годограф Михайлова изменяя частоту ω = 0 ... ∞ (рис. 64).
Рис. 64. Оценка устойчивости по критерию Михайлова
Система устойчива, т. к. годограф Михайлова начинается на положительной оси абсцисс, последовательно пересекает оси координат с увеличе119
нием частоты, проходя при этом четыре квадранта и оставаясь в четвертом
квадранте комплексной плоскости, что соответствует полученному характеристическому уравнению четвертого порядка для замкнутой системы автоматического регулирования.
Частотный критерий получил название критерия Х. Найквиста
(английский математик, 1932) и разработан специально для анализа устойчивости динамических систем, имеющих обратные связи. Данный
критерий аналогичен критерию Михайлова, но работает с АФЧХ разомкнутой системы, поэтому более сложен для расчетов.
Порядок применения критерия Найквиста.
1) Определяется передаточная функция разомкнутой системы.
2) Определяется число правых корней m характеристического
уравнения разомкнутой системы.
3) определяется частотная передаточная функция подстановкой
s = jω: Wрс(jω) = Re(ω) + Im(ω).
4) На комплексной плоскости строится по Re(ω) и Im(ω) (изменяя частоту ω от 0 до ∞ ) АФЧХ разомкнутой системы.
Определение критерия. Чтобы система в замкнутом состоянии
была устойчивой необходимо и достаточно, чтобы при изменении ω
от -∞ до +∞ годограф разомкнутой системы Wрс(jω) (АФЧХ), поворачиваясь вокруг начала координат по часовой стрелке, охватил точку (-1, j0) m раз, где m - число правых корней разомкнутой системы.
Если АФХ проходит через точку (-1; 0), то замкнутая система
находится на границе устойчивости (рис. 65).
На границе уст.
-1
Im
Неуст.
0
Re
Уст.
Рис. 65. Оценка устойчивости по критерию Найквиста (m=1)
120
В случае, если характеристическое уравнение разомкнутой системы правых корней не имеет (т.е. m = 0), то согласно критерию,
замкнутая система является устойчивой, если АФЧХ разомкнутой
системы Wрс(jω) не охватывает точку (-1; 0), в противном случае система будет неустойчива (рис. 66).
Im
уст.
0
-1
Re
Неуст.
Рис. 66. Оценка устойчивости по критерию Найквиста (m=0)
Пример.
Дана передаточная функция разомкнутой системы:
(
)
Wрс ( s ) = (6s + 1) / 10s 2 + 6s + 1 .
Требуется определить устойчивость замкнутой системы по критерию
Найквиста.
Характеристическое уравнение разомкнутой системы:
10s2 + 6s + 1 = 0.
Корни характеристического уравнения:
(
)
s1, 2 = − 6 ± 36 − 4 ⋅ 10 / 20 = (− 3 ± j ) / 10 , где j = − 1.
s1 = - 0,3 + 0,1j , s2 = - 0,3 - 0,1j.
Корни характеристического уравнения левые (отрицательная вещественная часть), правых корней нет m = 0.
Определим частотную передаточную функция путем подстановкой
вместо s→jω:
Wрс ( jω ) = [6( jω ) + 1] / 10( jω ) 2 + 6( jω ) + 1 =
[
=
]
(6( jω ) + 1) ⋅ ((1 − 10ω ) − 6( jω ))
2
((1 − 10ω 2 ) + 6( jω )) ⋅ ((1 − 10ω 2 ) − 6( jω ))
=
26ω 2 + 1 − 60 jω 3
100ω 4 + 16ω 2 + 1
.
Выделим действительную и мнимую части:
26ω 2 + 1
− 60ω 3
Re(ω) =
,
Im(ω)
=
−
.
100ω 4 + 16ω 2 + 1
100ω 4 + 16ω 2 + 1
121
Построим АФЧХ разомкнутой системы изменяя ω = 0 ... ∞ (рис. 67).
1.5
0.75
Re( ω )
−1
− 0.5
0
0.5
1
− 0.75
− 1.5
Im ( ω )
Рис. 67. АФЧХ разомкнутой системы
Замкнутая система не устойчива, так как амплитудно-фазовая характеристика Wрс,(jω) разомкнутой системы не обходит точку с координатами (-1;
j0) при m= 0.
Для определения устойчивости по критерию Найквиста можно
строить не АФЧХ, а логарифмические частотные характеристики разомкнутой системы.
13.2. Качество АСУ
Если исследуемая АСР устойчива, то может возникнуть вопрос
о том, насколько качественно происходит регулирование в этой системе и удовлетворяет ли оно технологическим требованиям данного
процесса. Качество процесса управления определяется размером динамической ошибки, равной разности между текущим и заданным
значениями управляемой величины:
е(t)=x(t)-y(t).
Но функцию ошибки е(t) для любого момента времени трудно
определить, поскольку она описывается, как правило, с помощью ДУ
системы высокого порядка, и зависит от большого количества параметров системы. Поэтому оценивают качество САУ по некоторым ее
свойствам, которые определяют показатели качества.
Показатели качества делятся на показатели качества в переходном режиме и показатели качества в установившемся режиме. Пока122
затели качества в переходном режиме делятся на прямые и косвенные
показатели. Косвенные делятся:
- на корневые;
- частотные;
- интегральные.
В установившемся режиме наиболее полной характеристикой
качества системы является установившаяся ошибка.
13.2.1. Прямые показатели качества
Прямые оценки качества СУ определяются непосредственно
по переходной характеристике по каналу управления или возмущения Переходный процесс устойчивой системы всегда затухает и, в зависимости от характера затухания, подразделяется на монотонный и
колебательный (рис. 68). При этом имеется в виду, что на вход системы подано ступенчатое возмущение f(t) = 1(t).
Ниже перечислены прямые показатели качества переходного
процесса.
1. Время переходного процесса - tp.
Время переходного процесса (время регулирования) - минимальное время, по истечении которого отклонение выходной величины y(t) от установившегося значения yуст не превышает некоторой заданной величины ±q. Значение q выбирают обычно равным q = ±5
%·х или (0,05·х), где х·- задание.
Этот показатель характеризует скорость протекания переходного процесса. Если кривая переходного процесса монотонна, то этот
показатель является единственным.
123
у(t)
А1
уmax
А3
±0.05х
eс
х
yуст
0
τ
tmax
tp
t
Рис. 68. Пример переходной характеристики
2. Перерегулирование – δ.
Перерегулирование есть разность между максимальным значением - ymax переходной характеристики и её установившимся значением - yуст (т. е. отношение максимального отклонения управляемой
величины А1 к своему установившемуся значению), выраженная в
процентах:
δ=
y max − y уст
A1
=
⋅100.
y уст
y уст
В большинстве случаев требуется, чтобы перерегулирование
не превышало 10 – 30 %.
У апериодического переходного процесса можно обеспечить
нулевое перерегулирование.
Увеличение быстродействия обычно приводит к увеличению
перерегулирования.
3. Степень затухания колебаний ψ определяется по формуле:
Ψ =1−
A3
,
A1
где А1 и А3 - 1- и 3-я амплитуды переходной кривой. Чем ψ ближе к 1
тем система лучше, но обычно довольствуются ψ> 0,7 ÷ 0,8.
124
4. Статическая ошибка – ес.
Это отклонения установившегося значения выходной величины
от заданной – х:
ес = х - ууст.
5. Время достижения первого максимума tmax определяется по
графику.
6. Запаздывание – τ.
Это время от момента нанесения возмущения на систему до начала изменения выходной величины.
7. Динамический коэффициент регулирования - Rd %, который определяется из формулы:
Rd = у1/уо∙100.
Рис. 69. Динамический коэффициент регулирования
Величина Rd характеризует степень воздействия регулятора на
процесс, т. е. степень понижения динамического отклонения в системе с регулятором и без него (рис. 69).
13.2.2. Косвенные показатели качества
Многие свойства системы можно определить при проектировании, по расположению корней характеристического полинома на
комплексной плоскости. Прежде всего, все корни si для устойчивой
системы должны находиться в левой полуплоскости, то есть слева от
125
мнимой оси (рис. 70). На рис. 70 знаком отмечены положения корней характеристического уравнения.
Чем дальше от мнимой оси расположены корни характеристического уравнения, тем дальше от границы устойчивости находится
система и тем выше ее быстродействие.
Im
η
γ
Re
Рис. 70. Корневые показатели качества
Для оценки быстродействия системы используют корневой показатель - степень устойчивости (η), а для оценки скорости затухания
колебаний в системе - степень колебательности (m).
1. Степень устойчивости - η, расстояние от мнимой оси до
ближайшего корня:
η = min Re( si ) ,
где Re(si) - действительная часть корня si.
2. Степень колебательности – m.
Если в уравнение степени затухания колебаний Ψ = 1 −
вить вместо A3 = A1e −α ⋅T0 (где T0 =
ний) получим Ψ
α
− 2π ⋅
= 1− e ω
A3
, подстаA1
2π
- период собственных колебаω
. Отношение
α
= m принято называть
ω
корневым показателем запаса устойчивости или степенью колебательности. Тогда получим связь степени затухания колебаний со степенью колебательности:
126
Ψ = 1 − e −2π ⋅m
Чем больше величина m, тем слабее затухают колебания, вызванные этими корнями, за 1 период колебаний.
Рассчитывается через угол γ: m = tg γ. Для определения γ проводятся два луча, которые ограничивают все корни на комплексной
плоскости. γ - угол между этими лучами. Степень колебательности
может быть определена также по формуле:
m = min
Re( si )
.
Im(si )
Если m=0, то переходный процесс будет апериодическим.
При проектировании систем управления обычно требуется
обеспечить быстродействие не ниже заданного (степень устойчивости не меньше заданной min η ) и колебательность не выше заданной
max μ . Эти условия определяют усеченный сектор на комплексной
плоскости.
Оценить качество системы управления можно не только по переходным процессом, но и по частотным характеристикам.
Поведение реального объекта управления всегда несколько отличается от рассматриваемой модели, более того, его динамика может меняться во времени (корабль расходует топливо в ходе рейса).
Поэтому недостаточно спроектировать просто устойчивую систему,
нужно, чтобы система сохранила устойчивость при некоторых изменениях параметров объекта и регулятора в сравнении с расчетными,
то есть, обладала запасами устойчивости.
Обычно рассматривают запасы устойчивости по амплитуде ∆Α
и по фазе ∆ϕ. Запас устойчивости по амплитуде ∆Α – это дополнительное усиление контура, а запас устойчивости по фазе ∆ϕ – это дополнительный сдвиг фазы, которое необходимо, чтобы вывести систему на границу области устойчивости.
Запас по амплитуде вычисляется по формуле: ∆A = −20lg Ag ,
где Ag < 1 – значение амплитудной характеристики на частоте ωg, где
фазовая характеристика равна −180°. В практических задачах нужно
обеспечивать запас по амплитуде не менее 6 дБ.
127
Запас устойчивости по фазе ∆ϕ определяется на частоте среза
ωc, где A(ωc) = 1 . Запас по фазе должен быть не менее 30°.
Запасы устойчивости ∆Α и ∆ϕ можно определить графически,
для этого строят АФЧХ разомкнутой системы (рис. 71).
Запас устойчивости по амплитуде ∆Α определяется по точке
пересечения АФЧХ с отрицательной действительной полуосью.
Для определения ∆ϕ строится окружность единичного радиуса
с центром в начале координат. Запас ∆ϕ определяется по точке пересечения с этой окружностью.
∆Α Im
1
-1
Re
∆ϕ
Рис. 71. АФЧХ разомкнутой системы
Еще одной частотной характеристикой оценки качества системы является показатель колебательности M. Он определяется по АЧХ
замкнутой системы, как отношение ее максимума к значению на нулевой частоте (рис. 72).
Все описанные выше показатели качества связаны между собой
определенными соотношениями:
−
π
m
(
)
tp = 3 /η ; Ψ = 1 − M ; M = m 2 + 1 / (2m ) ,
где tp - время переходного процесса; η - степень устойчивости; ψ степень затухания колебаний; m - степень колебательности; M - показатель колебательности.
Для обобщенной оценки быстроты затухания и величины отклонения регулируемой величины, в виде единого числового значения
используют интегральные оценки качества.
128
Рис. 72. АЧХ замкнутой системы
Простейшей интегральной оценкой является линейная интегральная
оценка:
∞
∫
I1 = e(t )dt .
0
Она определяет площадь между заданным значение выходной
величины х(t) и её текущим значением у(t) (е(t) =х(t) - у(t)).
Недостаток интегральной оценки I1 состоит в том, что она годится только для апериодических (монотонных) переходных процессов (рис.73, а). Если же имеют место колебания (рис.73, б), то алгебраическое сложение площадей может привести к ситуации, когда при
больших колебаниях I1 = min.
В целях устранения этого недостатка на практике чаще всего
применяют квадратичную интегральную оценку:
∞
∫
I 2 = e 2 (t )dt .
0
Этот критерий не зависит от знака е(t) и, следовательно, может быть применен как для монотонных, так и для колебательных
процессов. Квадратная степень убирает знак, кроме того большая
ошибка в квадрате будет ещё больше, а маленькая ещё меньше.
Минимизация интегральной квадратичной оценки I2 приводит к
большим перерегулированиям
переходного процесса (до 20 %
от установившегося значения y(∞).
129
Рис. 73. Переходные процессы: а - апериодический, б - колебательный
В связи с этим применяют улучшенная квадратичная интегральную оценку I3, учитывающую не только величину ошибки, но и скорость ее изменения:
∞
∫
I 3` = ( e 2 (t ) + β 2 ⋅ e′2 (t ))dt ,
0
где β – весовой коэффициент, который определяет значимость второго слагаемого подынтегральной функции.
В улучшенной квадратичной интегральной оценки I3 налагаются ограничения на величину ошибки е(t) и налагается ограничение на
скорость ее изменения e′(t ) . В результате чего получают достаточно
быстрые и плавные переходные процессы.
13.2.3. Робастность
Параметры стационарных систем с течением времени в силу старения или других причин могут меняться. Кроме того, при
разработке регуляторов параметры объекта могут быть точно не
известны. В подобных случаях возникает необходимость построения систем управления таким образом, чтобы она была устойчива не при одних фиксированных значениях параметров, а
при всех возможных их значениях и обеспечивала приемлемое
качество управления при малых отклонениях внешних возмущений от номинальных моделей. В современной теории управления это
свойство называют робастностью (грубостью).
130
Робастное управление — совокупность методов теории управления, целью которых является синтез такого регулятора, который
обеспечивал бы хорошее качество управления, если объект управления отличается от расчётного или его математическая модель точно
неизвестна.
Для исследования робастной устойчивости систем управления
на практике используется подход, базирующийся на теореме Харитонова, которая позволяет проверить робастную устойчивость характеристического полинома:
∆ ( s) = a0 + a1 s + ... + a n s n −1 + an s n ,
где коэффициенты a0, a1,..., a, точно неизвестны, но принадлежат определенным интервалам:
l i < ai < + u i , (i = 1,..., n).
Оказывается, полином Δ(s) устойчив при всех возможных значениях коэффициентов тогда и только тогда, когда устойчивы четыре
полинома Харитонова:
Таким образом, для проверки устойчивости бесконечного числа возможных характеристических полиномов достаточно проверить
устойчивость четырех полиномов Харитонова:
∆1 ( s) = l 0 + l 1s + u2 s 2 + u3 s 3 + l 4 s 4 + l 5 s 5 + ...
∆ 2 (s ) = u0 + u1s + l 2 s 2 + l 3 s 3 + u4 s 4 + u5 s 5 + ...
∆ 3 ( s) = l 0 + u1s + u2 s 2 + l 3 s 3 + l 4 s 4 + u5 s 5 + ...
∆ 4 (s ) = u0 + l1s + l 2 s 2 + u3 s 3 + u4 s 4 + l 5 s 5 + ...
Проектирование робастных систем управления – одна из сложных проблем современной теории управления.
131
14. ОСНОВНЫЕ ПОНЯТИЯ ОБ ИЗМЕРЕНИЯХ
И СРЕДСТВАХ ИЗМЕРЕНИЯ. ПОГРЕШНОСТИ ИЗМЕРЕНИЙ
Измерения являются основой построения систем управления
химико-технологических процессов. Без знания текущих параметров
невозможно контролировать и управлять ходом процесса.
Наука об измерениях, методах, средствах обеспечения их единства и способах достижения требуемой точности называется метрологией.
Слово "метрология" образовано из двух греческих слов: "метрон" – мера и "логос" – учение. Дословный перевод слова "метрология" – учение о мерах.
Измерить какую-либо величину, значит сравнить её с другой однородной величиной (мерой), принятой за единицу измерения.
Мера – средство измерений, предназначенное для воспроизведения физической величины заданного размера.
Одной из главных задач метрологии является обеспечение
единства измерений. Решение этой задачи невозможно без создания
эталонной базы измерений. Попытки решения задачи обеспечения
единства измерений привели более двухсот лет назад во Франции к
идее создания метрической системы, а затем – к подписанию рядом
стран метрической конвенции в 1875 году. Именно с тех пор в метрологическую практику вошло слово «эталон».
Эталон (фр. etalon) - средство измерений (или комплекс средств
измерений), обеспечивающее воспроизведение и (или) хранение единицы, а также передачу её размера нижестоящим по поверочной схеме средствам измерений и утвержденное в качестве эталона в установленном порядке.
Эталон, обеспечивающий воспроизведение единицы с наивысшей в стране точностью называемся первичным. Все остальные разновидности эталонов называют вторичными (эталон копия, эталон
сравнения, рабочий эталон).
Термин «рабочий эталон» заменил используемый ранее термин
«образцовое средство измерений».
Центральным звеном эталонной базы является система государственных эталонов (эталонная база).
132
В России, как и в подавляющем большинстве стран мира, применяют Международную систему единиц, сокращенно СИ (от начальных
букв русской транскрипции французского наименования Sisteme
Internationale). Эта система была разработана специальной международной комиссией и в первоначальном варианте утверждена в I960 г. решением XI Генеральной конференции по мерам и весам (ГКМВ) — высшего органа метрической конвенции. В качестве основных единиц были
выбраны метр, килограмм, секунда, ампер, кельвин, кандела и моль, а
все производные единицы являлись когерентными. Когерентные единицы образуются из уравнений связи между величинами, в которых числовые коэффициенты приняты равными 1 при подстановке единиц СИ
(приложение).
До принятия Международной системы единиц СИ в мире использовалась система единиц измерения СГС (сантиметр-граммсекунда) принятая в 1881 г. 1-м Международным конгрессом электриков (Париж). СИ отличается от СГС некоторыми разными единицами измерения и размерностью величин.
В России внедрение СИ началось с 1961 г., хотя официально
СИ действует с 1 января 1982 г. в соответствии с ГОСТ 8.417 - 2002
«Государственная система обеспечения единства измерений. Единицы величин».
В настоящее время эталонная база России имеет в своем составе
118 первичных государственных эталонов и более 300 вторичных эталонов физических величин. Международном бюро мер и весов
(МБМВ) находится в Севре (предместье Парижа, Франция). В МБМВ
хранятся международные эталоны основных единиц и выполняются
международные метрологические работы, связанные с разработкой и
хранением международных эталонов и сличением национальных эталонов с международными и между собой.
Под измерением понимают совокупность операций по применению технического средства, хранящего единицу физической
величины, обеспечивающих нахождение соотношения (в явном
или неявном виде) измеряемой величины с её единицей и получение
значения этой величины.
Принцип измерений – совокупность физических явлений, на которых основаны измерения.
133
Средство измерений – техническое средство, используемое при
измерениях и имеющее нормированные метрологические свойства.
Измерительный прибор – техническое средство, предназначенное для получения значений измеряемой физической величины в установленном диапазоне.
Различают следующие измерительные приборы:
- приборы прямого действия;
- приборы сравнения.
Приборы прямого действия отображают измеряемую величину
на показывающем устройстве, имеющем соответствующую градуировку в единицах этой величины. К таким приборам относятся, например, термометры, амперметры, вольтметры и т. п.
Приборы сравнения предназначены для сравнения измеряемых
величин с величинами, значения которых известны. Например, приборы для измерения яркости, давления сжатого воздуха и др. Эти
приборы более точные.
По способу отчёта значений измеряемых величин приборы
подразделяются на показывающие (в том числе аналоговые и цифровые) и регистрирующие. Регистрирующие приборы по способу записи делятся на самопишущие и печатающие. В самопишущих приборах запись показаний представляется в графическом виде, в печатающих – в числовой форме.
Измерительный преобразователь – техническое средство с
нормированными метрологическими характеристиками, служащее
для преобразования измеряемой величины в другую величину или
измерительный сигнал, удобный для обработки, хранения, дальнейших преобразований, индикации или передачи.
Преобразуемую величину называют входной, а результат
преобразования – выходной величиной. Основной метрологической характеристикой измерительного преобразователя считается
соотношение между входной и выходной величинами, называемое
функцией преобразования. Измерительные преобразователи входят в
состав измерительных приборов или применяются вместе с какимлибо средством измерений. Самыми распространёнными являются
первичные измерительные преобразователи (ПИП), которые служат
для непосредственного восприятия измеряемой величины (как правило, неэлектрической) и преобразования её в другую величину –
электрическую.
134
ПИП, от которого поступают измерительные сигналы, конструктивно оформленный как обособленное средство измерений (без
отсчётного устройства), называется датчиком.
Промежуточными измерительными преобразователями называются преобразователи, расположенные в измерительной цепи после ПИП и обычно по измеряемой (преобразуемой) физической величине однородные с ним.
По характеру преобразования измерительные преобразователи
делятся на аналого-цифровые (АЦП) и цифроаналоговые (ЦАП).
АЦП и ЦАП всегда являются промежуточными.
Измерительная система – совокупность функционально объединённых мер, измерительных приборов, измерительных преобразователей, ЭВМ и других технических средств, размещённых в разных
точках контролируемого объекта и т. п. с целью измерений одной или
нескольких физических величин, свойственных этому объекту, и выработки измерительных сигналов в разных целях.
Измерительный прибор допускающий только отсчитывание показаний называют показывающим, а записывающий показания – регистрирующим.
Измерения могут быть классифицированы по ряду признаков:
по способу получения информации, по характеру изменений измеряемой величины в процессе измерений, по количеству измерительной информации, по отношению к основным единицам.
По способу получения информации различают следующие виды измерений:
− прямые;
− косвенные;
− совокупные;
− совместные.
Прямые измерения – это измерения, при которых значения измеряемой величины определяют непосредственно из опытных
данных.
Измеряемая величина сравнивается с единицей измерения, при
помощи меры или измерительного прибора, шкала которого отградуирована в единицах измерения
135
Прямые измерения осуществляются одним из четырех методов:
1) непосредственной оценки - измеряемая величина преобразуется в выходную величину прибора (термометры расширения, манометры и т. д.);
2) дифференцальный (разностный) – прибор непосредственно
определяет разность между измеряемой и некоторой известной величиной - мерой (дифманометр);
3) противопоставления - измеряемая величина сравнивается с
мерой при одновременном воздействии на прибор сравнения (рычажные весы);
4) компенсационный (нулевой) - измеряемая величина сравнивается с мерой при этом результирующий эффект воздействия на
прибор сравнения доводят до нуля (потенциометр, мост).
Косвенные измерения – это измерения, при которых измеряемую величину определяют на основании известной зависимости между этой величиной и величинами подвергаемым прямым измерениям (определение плотности – ρ, по массе - m и объему – V, используя
зависимость ρ=m/V).
Совокупные – это измерения, при которых искомая величина определяется путём решения системы уравнений, полученных
из совокупности прямых измерений одной или нескольких однородных величин (определение коэффициентов температурного линейного расширения).
Совместные – это одновременное измерение двух и более неоднородных величин для отыскания зависимости между ними.
Любые измерения сопровождаются погрешностями. Они получается из-за несовершенства систем и средств измерения, непостоянства условий наблюдения и субъективных ошибок наблюдателя.
Погрешностью называют отклонение результата измерений от
действительного (истинного) значения измеряемой величины.
Следует иметь в виду, что истинное значение физической величины считается неизвестным и применяется в теоретических исследованиях. Действительное значение физической величины устанавливается экспериментально в предположении, что результат измерения максимально приближается к истинному значению.
136
Точность измерений – одна из характеристик качества измерения, отражающая близость к нулю погрешности результата измерения.
Характер проявления всех погрешностей дан ниже.
Случайные - имеют случайную природу и причина их неизвестна. Это погрешности, принимающие при повторных измерениях различные взаимонесвязанные значения, возникающие из-за вибрации,
влияния электромагнитных полей и т. д. Случайные погрешности
нельзя исключить из результатов измерений, но можно несколько
уточнить, используя методы оценки случайной погрешности. В появлении таких погрешностей не наблюдается какой-либо закономерности, они обнаруживаются при повторных измерениях одной и той же
величины в виде некоторого разброса получаемых результатов. Случайные погрешности неизбежны, неустранимы и всегда присутствуют в результате измерения. Поэтому для получения результата, минимально отличающегося от истинного значения измеряемой величины, проводят многократные измерения физической величины с последующей математической обработкой экспериментальных данных.
Промахи (грубые) – вызваны неправильными отсчетами по
прибору. Это случайная погрешность результата отдельного наблюдения, входящего в ряд измерений, которая для данных условий резко отличается от остальных результатов этого ряда. Промахи, как
правило, возникают из-за ошибок или неправильных действий оператора (его психофизиологического состояния, неверного отсчёта, считывания показаний с соседней шкалы прибора, ошибок в записях или
вычислениях, неправильного включения приборов или сбоев в их работе и др.). Возможной причиной возникновения грубых погрешностей также могут быть кратковременные резкие изменения условий
проведения измерений. Если промахи обнаруживаются в процессе
измерений, то результаты, их содержащие, отбрасывают. Однако чаще всего промахи выявляют только при окончательной обработке результатов измерений с помощью специальных статистических критериев. Для уменьшения промахов необходимо проводить наблюдении
два-четыре раза.
Систематические - обусловлены несовершенством методов
определения, конструкции прибора. Эти погрешности, остающиеся
137
постоянными или изменяющиеся по определённому закону, т. е. закономерно изменяющиеся при повторных измерениях одной и той же
физической величины. Различают инструментальные погрешности и
погрешности вследствие внешних причин. Систематические погрешности могут быть предсказаны, обнаружены и, благодаря этому, почти полностью устранены введением соответствующей поправки или
регулировкой средства измерения.
По способу выражения погрешности измерительных приборов
делятся:
− на абсолютные;
− относительные;
− приведённые.
Абсолютная погрешность (определяется в единицах измеряемой величины) - это разность между показаниями прибора Аi и действительным значением Ао измеряемой величины по показаниям образцовых приборов:
Δ = |Ai – Aо|.
Абсолютная погрешность не может в полной мере служить показателем точности измерений, так как одно и то же её значение, например Δх = 0,5 мм при х = 100 мм соответствует достаточно высокой точности измерений, а при х = 1 мм – низкой. Поэтому и вводится понятие относительной погрешности.
Относительная погрешность – это отношение абсолютной погрешности Δ к истинному показанию образцового прибора Aо, выраженное в процентах:
∆
δ=
⋅ 100 .
Ao
Эти формулы справедливы при условии, что Δ<<A0.
Эта наглядная характеристика точности результата измерения
не годится для нормирования погрешности средства измерения, так
как при изменении значений A0 принимает различные значения
вплоть до бесконечности при A0 = 0. В связи с этим для указания и
нормирования погрешностей средств измерений используется ещё
одна разновидность погрешности – приведённая.
138
Приведённая относительная погрешность – это отношение абсолютной погрешности к диапазону шкалы прибора, выраженное в
процентах:
γ =
∆
⋅ 100 ,
N к − Nн
где Nн , Nк - начальное и конечное значение шкалы прибора (нормирующее значение прибора).
Наибольшее и наименьшее значения диапазона измерений называется предел измерений прибора.
Кроме этого выделяют понятие вариации показаний приборов.
Абсолютная вариация показаний прибора ε – разность между
показаниями прибора при многократных повторных измерениях одной и той же физической величины.
На практике вариацию показаний прибора определяют как разность показаний прибора в одной и той же точке диапазона измерений
при плавном подходе к ней сначала со стороны меньших, а затем со
стороны больших значений измеряемой величины:
ε = Апрямого хода − Аобратного хода .
Значения Апрямого хода получают при увеличении измеряемого параметра, значения Аобратного хода – при уменьшении измеряемого параметра. Абсолютная вариация показаний прибора обусловлена наличием эффектов гистерезиса и является частью абсолютной погрешности прибора.
Относительная вариация показаний прибора δε – отношение абсолютной вариации к истинному (действительному, измеренному)
значению измеряемой величины, выраженной в процентах:
ε
δε =
⋅ 100 .
Ao
По влиянию внешних условий различают основную и дополнительную погрешности средства измерений.
Основной называется погрешность средства измерений, определяемая в нормальных условиях его применения. Для каждого средства измерений в нормативно-технических документах оговариваются
условия эксплуатации – совокупность влияющих величин (темпера139
тура окружающей среды, влажность, давление, напряжение, частота
питающей сети и др.), при которых нормируется его погрешность.
Дополнительной называется погрешность средства измерений,
возникающая вследствие отклонения какой-либо из влияющих величин, т.е. дополнительная погрешность, увеличивающая общую погрешность прибора, возникает, если прибор работает в условиях, отличных от нормальных.
Качество устройства измерения оценивают классом точности,
который указывается в паспорте или на циферблате.
Класс точности – это обобщённая характеристика средства
измерений, выражаемая пределами допускаемых значений его основной и дополнительной погрешностей, а также другими характеристиками, влияющими на точность.
Чаще всего под классом точности понимают значение максимально допустимой приведённой относительной погрешности.
Классы точности приборов лежат в диапазоне от 0,2 до 4. Наибольшее распространение получили приборы с классами точности
0,2; 0,5; 0,6; 1,0; 1,5; 2,0; 2,5. Чем меньше класс точности, тем точней
прибор.
Если при поверке прибора, которая должна проводится строго
по регламенту, приведённая относительная погрешность больше заявленного класса точности, то прибор переводят в ближайший следующий класс.
Если приведённая относительная погрешность больше 4, то
прибор бракуется.
Чем точнее устройство, тем чаще его нужно проверять.
Если класс точности не указан, то абсолютная погрешность
равна половине цены деления шкалы.
В зависимости от класса точности приборы делятся на эталонные, образцовые и рабочие.
Рабочие приборы предназначены для практических целей измерений физических величин.
Образцовые приборы предназначены для поверки и градуировки по ним рабочих приборов.
140
Эталонные приборы служат для воспроизведения и хранения
единиц измерений с наивысшей точностью, а также для поверки образцовых приборов.
Поверка – совокупность операций, выполняемых в целях подтверждения соответствия средств измерений метрологическим требованиям.
Поверке подвергают средства измерений, подлежащие государственному метрологическому контролю и надзору. Класс
точности рабочего эталона должен быть выше класса точности
поверяемого прибора не менее, чем в 5 раз. Допускается использовать рабочий эталон с классом точности в 3 раза выше класса
точности поверяемого прибора при условии введения поправок в показания рабочего эталона.
Градуировка - это операция при помощи которой делениям
шкалы прибора придают значение выраженное в установленных единицах измерения.
Отношение изменения сигнала на выходе измерительного прибора к вызывающему его изменению измеряемой величины называется чувствительностью прибора.
Одной из важных характеристик средств измерений является
надежность. Под надежностью понимают свойство элемента, прибора и т. д. выполнять требуемые функции при соблюдении определенных условий в течение заданного промежутка времени. В статистических терминах, это вероятность того, что устройство будет работать без поломок в течение указанного промежутка времени или
заданного количества циклов.
15. ГОСУДАРСТВЕННАЯ СИСТЕМА ПРИБОРОВ
Государственная система промышленных приборов и средств
автоматизации (ГСП) создана с целью обеспечения техническими
средствами систем контроля, регулирования и управления технологическими процессами в различных отраслях промышленности.
На ранних этапах создания средств автоматики разрабатывалось множество различных приборов со сходными техническими характеристиками, однако при этом не учитывалась возможность со141
вместной работы приборов различных производителей. Это приводило к увеличению стоимости разработок сложных систем и тормозило
широкое внедрение средств автоматизации. Поэтому в 1960 г. было
принято решение о создании ГСП, а с 1961 г. начались работы по ее
реализации.
Одна из главнейших задач, решаемых ГСП, состоит в создании
ограниченной номенклатуры унифицированных устройств, способных максимально удовлетворять потребности различных отраслей
промышленности.
Сокращение номенклатуры средств автоматизации достигается
объединением их в отдельные функциональные группы, путем сведения функций этих устройств к ограниченному числу типовых функций. Оптимизация состава каждой группы обеспечивается разработкой параметрических рядов изделий.
В основу параметрического ряда заложена более узкая специализация выполняемых функций, ограничения по видам и параметрам
сигналов, ограничения по техническим параметрам изделий, пределам измерений, классам точности, параметрам питания и т.д. и, наконец, унификация конструктивного исполнения изделий.
В основу создания и совершенствования ГСП положены следующие системотехнические принципы:
- типизация и минимизация многообразия функций автоматического контроля, регулирования и управления;
- минимизация номенклатуры технических средств;
- унификация используемой вспомогательной энергии;
- блочно-модульное построение приборов и устройств;
- совместимость приборов и устройств.
По типизации и функциональному признаку все изделия
ГСП разделены на следующие четыре группы устройств:
- устройства получения информации о состоянии процесса или
объекта;
- устройства приема, преобразования и передачи информации
по каналам связи;
- устройства преобразования, хранения и обработки информации, формирования команд управления;
- устройства использования командной информации.
142
В первую группу устройств в зависимости от способа представления информации входят: датчики; нормирующие преобразователи,
формирующие унифицированный сигнал связи; приборы, обеспечивающие представление измерительной информации в форме, доступной для непосредственного восприятия наблюдателем, и устройства
алфавитно-цифровой информации, вводимой оператором вручную.
Вторая группа устройств содержит коммутаторы измерительных цепей, преобразователи сигналов и кодов, шифраторы и дешифраторы, согласующие устройства, средства телесигнализации, телеизмерения и телеуправления. Эти устройства используют для преобразования как измерительных, так и управляющих сигналов.
Третью группу составляют анализаторы сигналов, функциональные и операционные преобразователи, логические устройства и
устройства памяти, задатчики, регуляторы, управляющие вычислительные устройства и комплексы.
В четвертую группу входят исполнительные устройства (электрические, пневматические, гидравлические или комбинированные
исполнительные механизмы), усилители мощности, вспомогательные
устройства к ним, а также устройства представления информации.
Минимизация номенклатуры технических средств реализуется на основе двух принципов: унификации устройств одного функционального назначения на основе параметрического ряда этих изделий и агрегатирования комплекса технических средств для решения
крупных функциональных задач.
Под параметрическим рядом понимается физический параметр
химико-технологического процесса: температура, давление, расход,
уровень и т.д.
Агрегатные комплексы (АК) представляют собой совокупность
технических средств, организованных в виде функциональнопараметрических рядов, охватывающих требуемые диапазоны измерения в различных условиях эксплуатации и обеспечивающих выполнение всех функций в пределах заданного класса задач.
В номенклатуре технических средств широко используется
такой классификационный признак как тип изделия - совокуп143
ность изделий одинакового функционального назначения и принципа действия, сходных по конструктивному исполнению и
имеющих одинаковые главные параметры. В состав одного типа
может входить несколько типоразмеров и модификаций или исполнений изделия.
Типоразмеры изделия одного типа различаются значениями
главного параметра (для однофункциональных изделий).
Модификация - совокупность изделий одного типа, имеющих
определенные конструкционные особенности или определенное значение неглавного параметра.
Под исполнением обычно понимают изделия одного типа,
имеющие определенные конструктивные особенности, влияющие на
их эксплуатационные характеристики, например пожаровзрывобезопасное или морское.
По роду используемой вспомогательной энергии носителя
информационных сигналов устройства ГСП делятся на электрические, пневматические, гидравлические, а также устройства, работающие без использования вспомогательной энергии - приборы и регуляторы прямого действия.
Устройства, питающиеся при эксплуатации энергией одного
рода, образуют структурную группу или ветвь ГСП.
Достоинства электрических приборов: высокая чувствительность, точность, быстродействие, удобство передачи, хранения и обработки информации. Пневматические приборы обеспечивают повышенную безопасность при применении в легко воспламеняемых и
взрывоопасных средах, высокую надежность в тяжелых условиях работы и агрессивной атмосфере. Однако они уступают электронным
приборам по быстродействию, возможности передачи сигнала на
большое расстояние. Гидравлические приборы позволяют получать
точные перемещения исполнительных механизмов и большие усилия.
Унифицированный сигнал (УС) ГСП – это сигнал дистанционной передачи информации с унифицированными параметрами, обеспечивающий информационное сопряжение между блоками, приборами и установками ГСП.
Унификация означает введение ограничений, налагаемых на
сигналы, несущие сведения о контролируемой величине или команде.
144
Под унифицированным параметром УС ГСП понимается тот
его параметр, который является носителем информации: значение
постоянного или переменного тока или напряжения, или частоты,
код, давление воздуха пневматического сигнала.
В зависимости от вида унифицированных параметров в ГСП
применяют унифицированные сигналы четырех групп:
1) пневматические;
2) тока и напряжения электрические непрерывные;
3) частотные электрические непрерывные;
4) электрические кодированные.
Каждая группа УС ГСП определяется соответствующим государственным стандартом.
Стандартами установлены следующие диапазоны изменения
унифицированных аналоговых сигналов:
1. Пневматические:
- диапазон изменения сигнала 0,02 ÷ 0,1 МПа (0,2÷
1
кгс/см2);
- сигнал питания 0,14 МПа;
- расстояние передачи сигнала до 300 м.
2. Электрические:
- диапазон изменения сигналов постоянного тока: 0 ÷ 5 мА, 0 ÷
20 мА, 4 ÷ 20 мА, 0 ÷100 мА и др.;
- диапазон изменения сигналов постоянного напряжения: 0÷ 10
мВ, 0 ÷ 20 мВ, -10 ÷ 10 мВ, 0 ÷ 1 В, 0 ÷ 10 В, -1 ÷ 1 В и др.
- диапазон изменения сигналов переменного напряжения:
0 ÷ 1 В, 0 ÷ 2 В, 0 ÷ 10 В и др.;
- диапазон изменения сигналов переменного тока на частоте: 2
÷ 4 кГц, 4 ÷ 8 кГц и др.;
- питание электрических приборов : 5 В, 12 В, 24 В, 36 В, 220
В, 380 В и др.
Расстояние передачи электрического сигнала зависит от вида и
мощности электрического сигнала.
Блочно-модульный принцип характеризуется наличием отдельных модулей или блоков, выполняющих достаточно простую
функцию, что обеспечивает возможность создания различных функционально сложных устройств из ограниченного числа более про145
стых унифицированных блоков и модулей путем их наращивания и
стыковки. Это позволяет создавать новые АСУ из уже существующего набора узлов и блоков, что дает существенный экономический эффект. Применение этого принципа делает приборы более универсальными, позволяет использовать при их создании рациональный
минимум конструктивных элементов (сокращается количество наименований деталей). Вместе с тем возможность простой и легкой
замены отдельных узлов позволяет модернизировать эти приборы в
процессе эксплуатации, повышает их ремонтопригодность и расширяет круг решаемых ими задач (путем различных сочетаний функциональных звеньев и введением специализированных деталей),
уменьшает стоимость, позволяет реализовать принцип взаимозаменяемости приборов и средств автоматизации. Блочно-модульное построение приборов позволяет широко применять при их изготовлении современную технологию и максимально использовать кооперацию и специализацию предприятий.
Существенное сокращение числа функциональных различных
устройств достигается обеспечением их совместимости в автоматизированных системах управления. Концепция совместимости, включающая в себя требования информационного, энергетического, конструктивного, метрологического, эксплуатационного сопряжений
между изделиями ГСП, основана на последовательной унификации и
стандартизации свойств и характеристик приборов.
16. ПЕРВИЧНЫЕ ПРЕОБРАЗОВАТЕЛИ
Первым в измерительной цепи выходного параметра объекта
управления стоит первичный преобразователь.
Первичные преобразователи (датчики) – устройства предназначены для непосредственного преобразования измеряемой физической величины в другую величину, удобную для дальнейшего использования и передачи на расстояние (унифицированный сигнал).
Если же датчик выдает неунифицированный сигнал, то для
приведения его к стандартному диапазону используется дополнительно ещё соответствующий преобразователь.
По виду выходного сигнала все датчики делятся на генераторные, параметрические и механические.
146
Генераторные датчики (активные) осуществляют преобразование различных видов энергии в электрическую, то есть они генерируют электрическую энергию под действием измеряемой величины
(термоэлектрические, пьезоэлектрические, электрокинетические,
гальванические и др. датчики).
В табл. 3 приведены примеры некоторых физических эффектов,
которые используются для построения генераторных датчиков.
Измеряемая
величина
Поток оптического
излучения
Сила, ускорение
Скорость
Перемещение
Используемый
эффект
Внешний фотоэффект
Внутренний фотоэффект
Пьезоэлектрический эффект
Электромагнитная индукция
Эффект Холла
Таблица 3
Выходная
величина
Ток
Напряжение
Заряд
Напряжение
Напряжение
Внешний фотоэффект заключается в том, что под действием
светового потока электроны покидают фотокатод и образуют ток,
пропорциональный освещенности.
Внутренний фотоэффект в полупроводнике заключается в том,
что под действием светового потока электроны и дырки, освобожденные в окрестностях освещенного p-n - перехода, перемещаясь под
действием электрического поля, вызывают изменение напряжения на
границах полупроводника.
Пьезоэлектрический эффект заключается в том, что при деформации пьезоэлектрика появляются заряды на противолежащих
поверхностях (рис. 74).
Рис. 74. Пьезоэлектрический эффект
147
Явление электромагнитной индукции заключается в том, что при
изменении магнитного потока через замкнутый контур, в нем наводится ЭДС e = -С·dФ/dt (рис. 75), пропорциональная скорости
вращения ω.
Рис. 75. Электромагнитная индукция
Эффект Холла заключается в том, что при пропускании тока
через образец полупроводника, находящийся в магнитном поле, в
перпендикулярном направлении возникает ЭДС U=k∙I∙B∙sinθ
(рис. 76).
Рис. 76. Эффект Холла
При перемещении постоянного магнита изменяется индукция B
и, следовательно, выходное напряжение датчика. Таким образом
можно измерять перемещение.
Параметрические датчики (пассивные) изменяют некоторые
параметры выходного импеданса (комплексного сопротивления) под
воздействием измеряемой величины. К ним относятся реостатные,
тензодатчики, термосопротивления и т. п. Им для работы необходим
дополнительный источник энергии. В табл. 4 указан ряд физических
эффектов, используемых для построения параметрических датчиков.
Импеданс параметрического датчика и его изменения можно
измерить, включив датчик в специальную электрическую схему, содержащую дополнительный источник питания и схему формирования сигнала.
148
Таблица 4
Измеряемая
величина
Температура
Поток оптического
излучения
Деформация
Изменяющийся
параметр
Сопротивление
Материалы
Металлы, полупроводники
Сопротивление
Полупроводники
Сопротивление
Сплавы никеля,
легированный кремний
Ферромагнитные сплавы,
магниторезистивные металлы:
висмут, антимонид индия
Перемещение
Магнитная
проницаемость,
сопротивление
Влажность
Сопротивление
Диэлектрическая
проницаемость
Хлористый литий,
окись алюминия, полимеры
Уровень
Диэлектрическая
проницаемость
Жидкие изоляционные
материалы
У механических датчиков выходным сигналом является усилие, развиваемое чувствительным элементом под действием измеряемой величины (мембранных, манометров, дифманометров, ротаметров и др.).
При измерениях некоторых физических величин не всегда удается преобразовать их сразу в электрическую величину. В этом случае измеряемую величину преобразуют в промежуточную неэлектрическую величину, которую затем преобразуют в электрическую. Совокупность двух измерительных преобразователей образует комбинированный датчик (рис. 77).
Рис 77. Комбинационный датчик
149
Например в комбинированном датчике давления, первичным
преобразователем служит мембрана, деформация которой преобразуется в электрическую величину датчиком, реагирующим на механическое смещение (прогиб мембраны).
17. МЕТОДЫ И ПРИБОРЫ ИЗМЕРЕНИЯ ОСНОВНЫХ
ФИЗИЧЕСКИХ ВЕЛИЧИН
ХИМИКО-ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ
Физическая величина – одно из свойств физического объекта,
(системы, процесса) общее в качественном отношении для многих
физических объектов, но в количественном отношении индивидуальное для каждого из них.
К основным физическим величинам характеризующим большинство химико-технологических процессов относят: температуру,
давление, расход, количество, уровень, влажность, состав, плотность,
вязкость, частоту вращения.
17.1. Методы и приборы измерения температуры
Из всех физических величин наиболее часто измеряемой является температура. Температура в термодинамике наряду с давлением
и объемом является одной из трех основных величин, характеризующих состояние вещества.
Известно, что зависимость между средней кинетической энергией поступательного движения молекул и количеством переданного
телу тепла для простейших веществ (идеальных газов)
3
описывается выражением E = ⋅ k ⋅ T , где k - постоянная Больцмана;
2
T - абсолютная температура. Отсюда вытекает определение температуры.
Температура - физическая величина, характеризующая степень
нагретости тела, которая определяется внутренней кинетической
энергией теплового движения молекул.
Температуру можно измерять только косвенным путем, основываясь на зависимости от температуры таких физических свойств
тел, которые поддаются непосредственному измерению. Применяе150
мые для этого вещества называются термометрическими, а устанавливаемая с их помощью шкала температуры – эмпирической.
Практически измеряют температуру методом сравнения нагретости двух тел, причём степень нагретости одного из тел предполагается известной.
17.1.1. Температурные шкалы
Для количественного определения температуры используют
температурные шкалы, которые представляют собой ряд отметок
внутри температурного интервала ограниченного двумя легко воспроизводимыми точками перехода химически чистых веществ из одного агрегатного состояния в другое. Например воды изо льда в жидкость и из жидкости в пар, при нормальном атмосферном давлении,
равном 760 мм рт. ст. (при понижении давления температура кипения
воды понижается).
Единица измерения температуры градус:
t −t
1 градус = k 0 ,
n
где n – целое число на которое разбивается интервал.
Основной недостаток эмпирических шкал температуры состоит
в их зависимости от специфических особенностей конкретных термометрических веществ.
В настоящее время в России и ряде других стран используются
две температурные шкалы:
- термодинамическая;
- международная практическая.
Шкала Кельвина (1848)
Термодинамической (абсолютной) шкалой называется температурная шкала Кельвина. Единица измерения «кельвин» (К), названа в
честь английского физика Уильяма Томсона, которому было пожаловано звание лорд Кельвин Ларгский из Айршира. В свою очередь, это
звание пошло от реки Кельвин (River Kelvin), протекающей через
территорию университета в Глазго. До 1968 года кельвин (К) официально именовался градусом Кельвина (оК).
151
Для шкалы Кельвина нижней точкой (началом шкалы) является
точка абсолютного нуля (0 К). Кельвин определил абсолютный ноль
теоретическим путем (-273 °C), а за один градус шкалы принял градус Цельсия.
В 1954 году на десятой главной конференции мер и весов
(Conférence Générale des Poids et Mesures, CGPM) решили, что фиксированной точкой шкалы Кельвина будет тройная точка воды (единственная экспериментальная точка шкалы), и температура ее будет
273,16 K. Один кельвин равен 1/273,16 термодинамической температуры тройной точки воды.
Тройная точка воды - строго определенные значения температуры и давления, при которых вода может одновременно и равновесно
существовать в виде трёх фаз - в твердом, жидком и газообразном состояниях. В системе СИ температура тройной точки воды принята
равной 273,16 К при давлении 609 Па (рис. 78).
Рис. 78. Тройная точка воды
При нормальных условиях равновесное сосуществование
льда, водяного пара и жидкой воды невозможно. Это обстоятельство
152
вроде бы противоречит обыденным наблюдениям — лёд, вода и пар
часто наблюдаются одновременно. Но противоречия нет - наблюдаемые состояния далеки от термодинамически равновесных и реализуются на практике только из-за кинетических ограничений фазовых
переходов.
Абсолютный ноль температуры - это минимальный предел
температуры, которую может иметь физическое тело. Считается,
что абсолютный ноль на практике недостижим. Его существование и положение на температурной шкале следует из экстраполяции наблюдаемых физических явлений, которая показывает, что
при абсолютном нуле энергия теплового движения молекул и
атомов вещества должна быть равна нулю, то есть хаотическое
движение частиц прекращается, и они образуют упорядоченную
структуру, занимая чёткое положение в узлах кристаллической
решётки (жидкий гелий составляет исключение). Однако с точки
зрения квантовой физики при абсолютном нуле температуры существуют нулевые колебания, которые обусловлены квантовыми
свойствами частиц и физического вакуума, их окружающего.
Международной практической температурной шкалой в 1948
году была принята стоградусная шкала Цельсия (оС).
Шкала Цельсия (1742)
Шкала придумана шведским профессором астрономии Андерсом Цельсием. Для построения шкалы Цельсия взяты точки плавления льда t0 = 0 оС и кипения воды tк = 100 оС в нормальных условиях.
Эта шкала получается из шкалы Кельвина, если за нуль принять
температуру замерзания воды, при этом 1 °C = 1 °K. Температура в
тройной точке воды равна +0,01 °C. Связь между значениями температуры по шкале Кельвина Т(К) и шкале Цельсия t (оС) имеет вид:
Т(К)= t оС+273,15 К, t(°C) = T(K) - 273,15.
Шкала Фаренгейта (1924)
В настоящее время, данная температурная шкала часто в быту,
используется в Англии и США.
Шкала придумана немецким физиком Даниэлем Габриэлем Фаренгейтом. Фаренгейт на 100 градусов разделил интервал от темпера153
туры самой холодной зимы в городе, где он жил, до температуры человеческого тела.
В настоящее время за точки перехода в шкале Фаренгейта (оF)
взяты точки плавления льда t0 = 32 оF и кипения воды tк = 212 оF. Градус
Фаренгейта (оF) равен 5/9 градуса Цельсия (оС).
Связь между температурами выраженных в градусах Фаренгейта (t оF) и Цельсия (t оС), имеет вид:
5
t o C t o F − 32
=
или t o F = t o C + 32 .
100
180
9
Кроме вышеперечисленных температурных шкал, существуют
редко применяемые шкалы: термодинамическая шкала Ранкина
(Rankine) и шкала Реомюра (Réaumur).
Шкала Ранкина (1859)
Абсолютная температурная шкала, тоже самое, что и шкала
Кельвина для Цельсия, только для Фаренгейта. Была предложена
шотландским физиком Уильямом Ранкином. Ещё используется в некоторых англоязычных странах для инженерных термодинамических
расчётов.
Шкала Ранкина начинается при температуре абсолютного нуля,
точка замерзания воды соответствует 491,67 °Ra, точка кипения воды
671,67 °Ra. Число градусов между точками замерзания и кипения воды по шкале Фаренгейта и Ранкина одинаково и равно 180.
Связь этой температурной шкалы с другими:
Т(К)=1,8(°Ra),
t(°Ra)=1,8·( t °C+273,15),
t(°Ra)= t (°F)+459,67.
Шкала Реомюра (1730)
Предложил французский естествоиспытатель Рене Антуан Реомюр. Он предложил взять за точку замерзания воды – 0 °Re, а за точку кипения воды 80 °Re, так как 80 можно было делить пополам 4
раза, и все время получать целое число.
Связь этой температурной шкал со шкалой Цельсия:
t(°Re)= 5/4·t (°C).
154
В настоящее время шкала вышла из употребления, даже во
Франции, как и шкалы Рёмера и Делиля.
17.1.2. Классификация термометров
Для измерения температуры используются технические приборы называемые термометрами.
Существует два метода измерений.
1. Контактный, когда чувствительный элемент термометра
находится в непосредственном контакте с определяемой средой.
2. Бесконтактный, когда температура определяется по тепловому излучению нагретых тел (используется при высоких температурах).
По свойству термодинамического тела, используемого для измерения температуры, можно выделить следующие шесть групп приборов для измерения температуры:
1) термометры расширения (основаны на изменении линейных размеров и объёма тел под действием температуры);
2) манометрические термометры (основаны на изменении
давления жидкостей, газов или пара в замкнутом объёме в зависимости от температуры);
3) термометры сопротивления (основаны на изменении активного сопротивления проводников и полупроводников);
4) термоэлектрические термометры (термопары) (основаны
на образовании в спае пары проводников термо-ЭДС);
5) термометры излучения (пирометры) (основаны на изменении яркости свечения нагретых тел).
6) диэлектрические измерители температуры (основаны на
изменения емкости от температуры)
17.1.3. Термометры расширения
Все термометры расширения подразделяются на жидкостные и
деформационные (основанные на расширении твердых тел).
Принцип действия жидкостных термометров расширения
основан на использовании изменения удельного объема рабочей
155
жидкости от температуры. В зависимости от интервала измеряемых
температур в качестве рабочей жидкости в жидкостных термометрах
применяют пентан (-190 ÷ 20 °С), петролейный эфир (-130 ÷ 25 °С),
этиловый спирт (-100 ÷ 75 °С), толуол (-90 ÷ 100 °С), ртуть (-35 ÷ 700
°С) и креозота (-5 ÷ 200 °С).
В химической промышленности используются ртутные стеклянные термометры (применение ртутных термометров в
пищевой промышленности категорически запрещено). Коэффициент расширения ртути мало изменяется при изменении температуры, поэтому шкала ртутного термометра до 200 °С практически
линейна. Термометры с органическими жидкостями из-за ряда недостатков применяют только для измерения низких температур. Из
всех таких термометров наибольшее распространение получили
спиртовые.
Жидкостные стеклянные термометры не обладают возможностью регистрации и передачи показаний на расстояние, непригодны
к ремонту, весьма хрупкие и обладают медленной реакцией на изменение температуры, но весьма просты, дешевы и при стандартных
условиях дают приемлемую точность.
Несмотря на большое разнообразие конструкций, все жидкостные стеклянные термометры относятся к одному из двух основных
типов: палочные (рис. 79, а) и со вложенной шкалой (рис. 79, б).
Палочные термометры имеют толстостенный капилляр наружным диаметром 6 - 8 мм, нижний конец которого образует резервуар
для жидкости. Шкалу наносят на внешнюю поверхность капилляра.
Термометры со вложенной шкалой имеют тонкостенный капилляр с
расширенным резервуаром для ртути. Шкалу наносят на пластинку
из молочного стекла, которая вместе с капилляром заключена в стеклянную оболочку, прикрепленную к резервуару термометра.
В зависимости от назначения стеклянные термометры подразделяются на образцовые (1- и 2-го разрядов), лабораторные и технические. Образцовые термометры 1-го разряда изготовляют только
палочного типа, а образцовые 2-го разряда и лабораторные - палочного типа или со вложенной шкалой. Технические термометры изготовляют только со вложенной шкалой. Технические и лабораторные
термометры могут иметь шкалы с различными пределами.
156
Рис. 79. Термометры расширения: а - палочный; б - со вложенной шкалой
Разновидностью ртутных термометров являются контактные
термометры, используемые в основном для сигнализации о нарушении заданного температурного режима.
Чувствительность термометра расширения зависит от разности коэффициентов объемного расширения термометрической
жидкости и стекла, от объема резервуара и диаметра капилляра.
Чувствительность термометра обычно лежит в пределах 0,4…5
мм/°С (для некоторых специальных термометров 100…200 мм/°С).
Для защиты от повреждений технические термометры монтируются в металлической оправе, а нижняя погружная часть закрывается металлической гильзой.
При измерении жидкостной термометр погружается до определенного уровня, иначе появляется дополнительная погрешность.
Обычно точность таких термометров составляет ±1 %.
Если по условию эксплуатации жидкостной термометр расширения не может быть погружен в измеряемую среду полностью, то
учитывают погрешность Δ вызываемую столбиком рабочей жидкости
имеющей температуру внешней среды:
Δt = n·β·(t2 - t1),
где n – число градусов выступающего столбика; β - коэффициентом
объемного расширения жидкости (для ртути β = 0,00016 град -1);
157
t2 – температура измеряемой среды; t1 - температура окружающей
(внешней) среды.
Если t1 < t2 – то к показанию термометра прибавляется Δt;
t1 > t2 – то к показанию термометра прибавляется – Δt.
К деформационным термометрам, основанных на расширении
твёрдых тел, относятся дилатометрические и биметаллические термометры. В этих термометрах с изменением температуры изменяются линейные размеры твердых тел.
Конструктивное исполнение дилатометрических термометров
(рис. 80) основано на преобразовании измеряемой температуры в
разность абсолютных значений удлинений двух стержней (одного
стержня), изготовленных из материалов с существенно различными
термическими коэффициентами линейного расширения α, град -1,
lt − lt 2
α= 1
,
l0 (t2 − t1 )
где lo, lt1, lt2 - линейные размеры тела при 0 °С, температурах t1 и t2.
Линейный размер стержня определяется по формуле:
l = lo∙(1 + α∙(t2 – t1)).
Рис. 80. Дилатометрический термометр
В силу того, что α мала, дилатометрические термометры применяются в качестве различного рода тепловых реле в устройствах
сигнализации и регулирования температуры.
Биметаллические термометры основаны на деформации биметаллической ленты при изменении температуры. Биметаллическая
158
лента представляет собой пластину, сваренный из двух слоев металлов с различным коэффициентом линейного расширения. Внутренний слой этой пластинки изготовляют из металла, имеющего большой коэффициент линейного расширения, а наружный из металла с
малым коэффициентом (из инвара).
Если один конец биметаллической пластинки зафиксирован, то
величина перемещения второго конца является мерой температуры
(рис. 81, а). Это перемещение может быть использовано для размыкания и замыкания контактов, что часто используется в бытовых
приборах.
Если биметаллическую пластину выполнить в виде спирали, то
перемещение свободного конца можно использовать для перемещения стрелки по шкале (рис. 81, б).
Рис. 81. Биметаллические термометры: а – конец биметаллической пластины
зафиксирован; б – биметаллическая пластинка в форме спирали
Угол поворота стрелки равен углу закручивания спирали, который пропорционален изменению температуры.
Биметаллические термометры обеспечивают изменение температуры с относительными погрешностями 1,0 - 1,5 %.
159
17.1.4. Манометрические термометры
Действие манометрических термометров основано на изменении давления рабочего вещества, заключенного в емкость постоянного объема, при изменении его температуры (рис. 82).
Прибор состоит из термобаллона 1, капиллярной трубки 2,
трубчатой пружины 3, держателя 4, поводка 5, зубчатого сектора 6 с
указательной стрелкой 7.
Рис. 82. Манометрический термометр с трубчатой пружиной
Вся система заполняется рабочим веществом. При нагревании
термобаллона 1, установленного в зоне измеряемой температуры,
давление рабочего вещества внутри замкнутой системы увеличивается. Увеличение давления воспринимается манометрической пружиной 3, которая воздействует через передаточный механизм 4 – 6
на стрелку 7 или перо прибора.
160
Манометрическая пружина может выполняется как в виде
одно - или многовитковой пружины, так и в виде сильфона. Термобаллоны обычно изготовляют из стали или латуни, обладающей высокой теплопроводностью, а капилляр - из медной или стальной
трубки с внутренним диаметром от 0,15 до 0,5 мм. Длина капилляра
может быть различной. Для защиты от механических повреждений
капилляр часто помещают в защитную оболочку из оцинкованного
стального провода.
Манометрическими термометрами можно измерять температуру в интервале от минус 120 до 600 °С
Различают манометрические термометры следующих типов:
газовые, жидкостные и конденсационные. Устройство всех типов
манометрических термометров аналогично. Различие в рабочем веществе заполняющем термобаллон.
В газовых манометрических термометрах вся система заполнена инертным газом под некоторым начальным давлением. В качестве заполнителя термосистемы применяют азот, аргон, гелий.
Работа газового манометрического термометра основана на
законе Шарля, устанавливающего прямую зависимость между давлением и температурой идеального газа
Pt = P0 [1+β(t-t0)],
где β = 1/273,15 °С - термический коэффициент расширения газа; t
- конечная температура; t0 - начальная температура.
-1
Достоинством газовых манометрических термометров является практически равномерная шкала прибора, а недостатком: сравнительно большая инерционность и большие размеры термобаллона.
В жидкостных манометрических термометрах, система заполнена жидкостью. В качестве манометрической жидкости в приборах этого типа применяются метиловый спирт, ксилол, толуол,
ртуть. Жидкостные манометрические термометры имеют также равномерную шкалу и значительно меньшие размеры термобаллона,
чем у газовых.
161
В конденсационных манометрических термометрах, термобаллон частично заполнен низкокипящей жидкостью, а остальное его пространство заполнено парами этой жидкости. В
конденсационных манометрических термометрах термосистемы
заполняют ацетоном, метилом хлористым, фреоном. Конденсационные манометрические термометры реализуют зависимость
упругости насыщенных паров низкокипящей жидкости от температуры. Поскольку эти зависимости для используемых жидкостей нелинейны, следовательно, и шкалы термометров неравномерны. Однако эти приборы обладают более высокой чувствительностью, чем газовые и жидкостные
Манометрические термометры бывают показывающими, самопишущими и контактными. Основная погрешность манометрических термометров всех видов равна ±1,5 % от максимального значения шкалы при нормальных условиях. При отклонении условий от
нормальных возникают дополнительные погрешности, которые рассчитывают или компенсируют.
17.1.5. Термометры сопротивления
Измерение температуры термометром сопротивления основано
на свойстве проводников и полупроводников изменять свое электрическое сопротивление при изменении температуры.
Электрическое сопротивление проводников и полупроводников
представляет собой некоторую функцию его температуры R = f(t).
Вид этой функции зависит от природы материала и определяется
экспериментально (путем градуировки термометра сопротивления).
При увеличении температуры сопротивление проводников возрастает, а полупроводников - снижается. Измеряя сопротивление нагретого проводника, можно определить температуру среды, где он находится.
Для изготовления чувствительных элементов серийных термосопротивлений (терморезистров) применяются чистые металлы, к которым предъявляются следующие требования:
− металл не должен окисляться или вступать в химические реакции с измеряемой средой;
162
− температурный коэффициент электрического сопротивления
металла α должен быть достаточно большим и неизменным;
− функция R = f(t) должна быть линейной и однозначной;
− удельное электрическое сопротивление металла должно
быть достаточно большим.
Наиболее полно указанным требованиям отвечают: платина,
медь, никель, вольфрам.
Сопротивление платиновых терморезисторов в диапазоне температур 0÷650 оС определяется выражением Rt = Rо (1+α·t+b·t2), где
Rо сопротивление при t=0 оС; a = 3,91·10-3 К-1; b = 5,78·10-7 К-1.
Медные сопротивления в диапазоне -50 °С ÷ 180 °С имеют линейную зависимость R(t) = Rо(1+α t), где α = 4,26·10-3 К-1. При температуре выше 200 °С медь окисляется.
В промышленных условиях наиболее широко применяются
медные - ТСМ и платиновые термометры сопротивления - ПТС
(ТСП), а также термосопротивления типов: ММТ-1, ММТ-4, ММТ-6
(медно-марганцевые); КМТ-1, КМТ-4 (кобальто-марганцевые).
Номинальные сопротивления ТСП от 1 до 500 Ом, ТСМ - от 10
до 100 Ом. Существует 5 классов точности ΔR/ Rо = 0,05 % для I
класса и 1 % для V класса.
Типичная конструкция терморезистивного датчика представлена на рис. 83.
Элементами конструкции являются: 1 - защитный кожух; 2 подложка, на которую нанесен измерительный элемент 3. Для увеличения теплопроводности и механической прочности пространство
между кожухом и чувствительным элементом заполнено порошком 4
из А12О3.
Рис. 83. Конструкция термометра сопротивления
163
У ТСП (с номинальным сопротивление 1-200 Ом) защитный кожух оформлен в виде стальной (алюминевой) трубки с
глухим концом, в которую помещена подложка - основа из слюды
(керамики), на которую бифилярно наматывается платиновая проволока, диаметром 30 (67) мкм и длиной до 2 м. Сопротивление зависит от длины намотки. Это обкладывается слюдяной обкладкой,
обвязывается серебряной лентой. Пространство между защитным
чехлом и термометром герметизируется алюминиевыми опилками.
Выводы загерметизированы.
Конструкция высокоомных (200-500 Ом) платиновых термосопротивлений отличается тем, что платина сразу напыляется на фарфоровую пластину и покрывается защитным слоем (лак).
Термометры сопротивлений выпускаются со строго определенными значениями сопротивлений, соответствующими своим типам и
градуировкам. Пример типов градуировок платиновых термометров
сопротивлений (ТСП) представлен в табл. 5.
В термометрах сопротивления возникают погрешности из-за
нестабильности во времени Ro, α и перегрева из-за измерительного
тока.
Постоянные времени промышленных термосопротивлений находятся в диапазоне от единиц до десятков секунд. Одним из методов уменьшения постоянной времени является увеличение теплового
контакта. Поэтому существуют терморезисторы со стеклянной изоляцией, при этом роль защитной арматуры выполняет стекло, в которое запаивают без зазора терморезистор.
Также для улучшения динамических характеристик до единиц
миллисекунд в качестве термосопротивлений используют пленочные
поверхностные зонды. Эти датчики предназначены для измерения
температур на поверхностях (рис. 84).
Рис. 84. Поверхностный зонд
164
Таблица 5
Тип
термометра
Градуировка
ТСП
ТСП
ТСП
ТСП
ТСП
гр. 100П гр.
23
гр. 21
гр. 50М
гр. 100М
Номинальное
сопротивление
при
0 оС, Ом
10
53
46
100
100
Диапазон температур при длительном применении, °С
от
0
-50
-200
-200
-50
до
650
180
650
650
180
Они наклеиваются на исследуемую поверхность и имеют постоянную времени 1 мс. Такой датчик чувствителен к деформациям
образца, поэтому при больших деформациях и малых изменениях
температур дает большую ошибку.
Другой разновидностью термометров сопротивления являются
полупроводниковые термодатчики. В качестве материала чувствительного элемента термометра сопротивления может использоваться
полупроводник.
Полупроводниковые термодатчики - это устройства, основой
которых является материал с проводимостью большей, чем у диэлектриков, и меньшей, чем у металлов.
Из полупроводниковых термодатчиков наибольшее распространение получили керамические датчики, получившие название
термисторов и позисторов. Они изготавливаются из смесей
поликристаллических полупроводниковых оксидов металлов (MgO,
MgAl2O3, МП2О3, Fe3O4, Cо2O3, NiO, ZnTiO4).
Порошки оксидов спекаются в форме под давлением и упрочняются посредством поверхностного обжига при температурах порядка 1000 °С в контролируемой атмосфере. Металлические выводы
припаиваются к двум точкам предварительно металлизированной
поверхности полупроводника. Чувствительный элемент может иметь
защитный корпус или капсулу.
Термисторы выпускаются в виде дисков, цилиндров, колец,
шариков. Высокие значения удельного сопротивления используемых
материалов позволяют получить необходимое сопротивление при
малых размерах (~1 мм). Вследствие этого термисторы позволяют
165
проводить измерения практически в точке и имеют малую теплоемкость, т. е. инерционность.
Температурный диапазон применения термисторов - от нескольких градусов Кельвина до 300 градусов Цельсия. Номинальные значения термисторов лежат в диапазоне от 100 до 300 Ом. Отклонение сопротивлений от номинальной величины составляет ±10 %, т. е. взаимозаменяемость посредственная.
Температурная характеристика термистора описывается выражением:
R(T ) = R(T1 ) ⋅ e,
1 1
B⋅( − )
T T1
где T1- некоторая фиксированная температура в Кельвинах;
Tтекущее значение температуры; B - константа в Кельвинах; R(T1) значение сопротивления термистора при температуре T1.
Температурный коэффициент термистора определяется, как:
1
dR(T )
B
α=
⋅
=− 2 .
R(T ) dT
T
Значение коэффициента В для t = 25 °С в зависимости от материала находится в диапазоне от 2000 до 6000 К, а температурный
коэффициент α - в диапазоне от - 0,02 до - 0,06 К-1.
Из-за малых размеров сила тока, приводящая к перегреву на 1
°С, в 15 раз меньше, чем для проволочных сопротивлений.
На рис. 85, а показаны для сравнения зависимости R(Т) для термистора и медного сопротивления.
Позисторы имеют положительный температурный коэффициент. Материал позистора представляет собой композицию полупроводниковой и сегнетоэлектрической керамики. Его сопротивление
определяется в основном переходным сопротивлением границ зерен,
которое зависит от диэлектрической проницаемости сегнетоэлектрической добавки. Основой промышленных позисторов служит титанат
бария с температурой фазового перехода-120 °С. Вид статической
характеристики позистора показан на рис. 85, б.
166
а
б
Рис. 85. Зависимость сопротивления от температуры: а - термистора и медного сопротивления; б - позистора
В сегнетоэлектрическом состоянии (ниже точки Кюри - tк) сопротивление позистора изменяется незначительно (от Ro до Rк). При
превышении температуры Кюри сегнетоэлектрик переходит в параэлектрическое состояние, а сопротивление элемента в узком температурном диапазоне tк ÷ tпр возрастает на несколько порядков из-за того,
что на границах зерен образуется запирающий слой, в результате чего сопротивление растет по экспоненциальному закону.
При дальнейшем превышении температуры сопротивление
снова падает, как у термисторов. Рабочей областью позистора является область от tк до tпр. Точку Кюри, а значит рабочий диапазон,
можно сдвигать технологическим путем. Крутизна преобразования
позисторов оценивается величиной от 30 до 150 % на
1 °С и является самой большой для параметрических температурных датчиков.
Термометры сопротивления не показывают температуру. Они
являются первичными преобразователями. В качестве вторичных
приборов в комплекте с термометрами сопротивлений применяются
обычно уравновешенные мосты, реже - логометры и неуравновешенные мосты.
Принципиальная схема измерительного моста (мост Уитстона)
представлена на рис. 86.
167
Рис. 86. Схема лабораторного уравновешенного моста
Данная мостовая схема электрических сопротивлений была
предложена английским физиком Чарльзом Уитстоном в 1843 г.
Термометр сопротивления Rt величина электрического сопротивления которого должна быть измерена, включается в одно
из плеч моста посредством соединительных: проводов, имеющих
сопротивление Rпр . Другие плечи моста состоят из постоянных манганиновых сопротивлений R1 и R2 и переменного калибровального
сопротивления - реохорда RР , выполненного также из манганина. К
одной диагонали моста (ас) подведено питание постоянного или переменного тока, а другую диагональ моста (bd) включен нульгальванометр.
При равновесии моста, когда перемещением движка реохорда
добиваются отсутствия тока ( U bd = 0 ) через нуль-гальванометр (НП)
выполняется равенство:
R1 Rt + 2 Rпр = R2 ⋅ R p ,
(
)
откуда
Rt =
168
R2
⋅ R p − 2Rпр .
R1
При изменении измеряемой температуры величина электрического сопротивления Rt изменится, мост разбалансируется. Чтобы
восстановить равновесие, необходимо при постоянных сопротивлениях R1 , R2 и Rпр соответственно изменить величину сопротивления
реохорда RР , переместив его движок. Таким образом, если откалибровать сопротивление RР по эталонным резисторам, то по положению его движка при равновесии моста можно однозначно судить о
величине сопротивления Rt , и, зная зависимость Rt = f (t ) , об измеряемой температуре.
Автоматические уравновешенные мосты для измерения сопротивлений используют двухпроводную или трехпроводную схему
подключения к термометру сопротивления.
Измерительная схема автоматического уравновешенного моста
переменного тока типа КСМ-4 с двухпроводной схемой подключения
к термометру сопротивления представлена на рис. 87.
Рис.
87.
Двухпроводная
уравновешенного моста
схема
подключения
автоматического
Мост состоит из четырёх плеч (c вершинами abcd), два из которых имеют постоянные сопротивления R1 и R2 , а третье RН - сопро169
тивление, предназначенное для подгонки нижнего предела измерения
прибора. В четвёртое плечо входит термометр сопротивления Rt и
две уравнительные катушки R у и R′у ( R у = R′у ). В вершине d моста
имеется реохорд RP с параллельно включенными резисторами Rш и
RВ . Резистором Rш (шунт) ограничивают силу тока, протекающего
через реохорд RP с целью уменьшения возможности подгорания
контакта в подвижной части реохорда (в точке d). Величиной резистора RВ определяют верхний предел
измерения прибора исходя из расчета приведенного сопротивления
RП:
Rр ⋅ Rш ⋅ RВ
RП =
+ Rн .
Rш ⋅ RВ + Rр ⋅ RВ + Rр ⋅ Rш
Для ограничения величины тока, последовательно с зажимами
питания измерительной схемы моста, включается сопротивление Rд .
При изменении температуры среды сопротивление термометра
Rt изменяется и в диагонали моста между точками b и d возникает
ток небаланса. Последний подается на вход электронного усилителя
ЭУ, заменяющего в автоматических мостах нуль-гальванометр. Усиленный по напряжению и мощности, сигнал небаланса определенной
фазы поступает на реверсивный двигатель РД.
Вращаясь в ту или иную сторону (в зависимости от знака небаланса) реверсивный двигатель перемещает движок реохорда d и показывающую стрелку до тех пор, пока измерительный мост не придёт
в состояние равновесия, т. е. когда ток не станет меньше зоны нечувствительности усилителя (т. е. условно в диагонали bd ток будет отсутствовать).
Уравнение равновесия имеет вид:
R1∙Rп = R2.(R4 + Rt + 2Rу).
На оси реохорда находится кулачок, по профилю которого
скользит рычажок, кинематически связанный тягами с записывающим пером, скользящим по диаграммной бумаге. Диаграммная
170
бумага перемещается синхронным двигателем СД с определенной
скоростью.
При градуировке приборов сопротивление каждого провода,
идущего от термометра до прибора, принято 2,5 ÷ 0,01 Ом. Если сопротивление каждого провода будет меньше 2,5 Ом, то в соединительную линию последовательно включаются добавочные манганиновые сопротивления R и R ′ , дополняющие сопротивления кажУ
У
дого провода до 2,5 Ом.
При колебаниях температуры окружающей среда величина сопротивления соединительных проводов будет изменяться.
В тех условиях, когда колебания температуры, окружающей
соединительные провода, значительны и погрешность при измерении может превысить допустимую величину, применяют трехпроводную систему подключения термометра.
Трехпроводная схема подключения моста представлена на рис. 88.
Rл
R4
Rt
Rл
Rл
R1
Рис. 88. Трехпроводная схема подключения моста
В этом случае уравнение равновесия примет вид:
(R1 + Rл).R3 ≈ R2.(R4 + Rt + 2Rл).
Сопротивление соединительных проводов Rл входит в обе части
уравнения и частично компенсируется.
Логометры – это приборы магнитно-электрической системы,
состоящие из магнитной 1 и подвижной части 2, которая состоит из
171
двух жестко скрепленных между собой рамок 3 и 4 под некоторым
углом. Принципиальная схема логометра представлена на рис. 89.
К рамкам 3 и 4 прикреплена стрелка, перемещающаяся вдоль
шкалы проградуированной в градусах. Каждая рамка вместе с сопротивлениями Rt, R и источником питания Е образует замкнутый контур. Rt - термометр сопротивления, а R - постоянное сопротивление.
3
4
N
Rt
1
S
R
2
I1
E
I2
Рис. 89. Принципиальная схема логометра
Угол поворота φ подвижной системы, есть функция отношения
токов в обеих рамках φ = f(I1/I2), где I1 и I2 – токи протекающие по
рамкам. Если Rt = R то I1 = I2 и подвижная система находится в среднем положении, так как вращающие моменты рамок М1 и М2 оказываются равными и направленными навстречу один другому:
М1 = С1·В1·I1,
М2 = С2·В2·I2,
где С1, С2 – константы зависящие от геометрических размеров рамок
и числа витков, В1, В2 – магнитные индукции.
При изменении измеряемой температуры меняется Rt вследствие чего, меняется ток I1, нарушается равенство моментов
М1 ≠ М2
и происходит поворот подвижной системы на угол φ, когда вращающие моменты рамок станут снова равными.
Достоинством логометров является то, что угол поворота φ не
зависит от напряжения источника питания Е.
172
17.1.6. Термоэлектрические термометры
В основе работы термопар лежат термоэлектрических эффекты.
Термоэлектрические эффекты отражают преобразование энергии теплового движения в электрическую энергию движущихся зарядов.
Эффект Пельтье.
В соединении двух разных проводников А и В с одинаковой температурой t устанавливается разность потенциалов EAB(t) в точках М и
N, называемая ЭДС Пельтье, которая зависит только от природы проводников и их температуры (рис. 90).
Рис. 90. Эффект Пелтье
Кроме того, в 1934 г. Жан Пельтье установил, что при пропускании тока теплота выделяется в одном спае и поглощается в другом
в зависимости от направления тока через спай. КПД такого термоэлектрического генератора (холодильника) невелико и составляет
единицы процента. Однако этот эффект в настоящее время широко
используется в компьютерной технике, для охлаждения процессоров
в виде модулей (куллеров) Пельтье.
Эффект Томпсона.
Между двумя точками M и N однородного проводника A с различными температурами возникает ЭДС EA(tM, tN), которая зависит
только от природы проводника и температур tM и tN (рис. 91).
Рис. 91. Эффект Томпсона
173
Эффект Зеебека.
Явление термоэлектричества открыто в 1823 г. Зеебеком: в
цепи, состоящей из двух разнородных проводников А и В, спаи которых находятся при разных температурах t1 и t2,
возникает
ЭДС, которая является результатом эффектов
Пельтье
и
Томпсона в
данной цепи (рис. 92). Если в качестве
t1 взять например 0 °C, то ЭДС данной пары проводников будет зависеть только от t2.
Рис. 92. Эффект Зеебека
Значение термоЭДС зависит только от природы проводников и
от температуры спаев и не зависит от распределения температуры
вдоль проводников. Если места соединения находятся при одной
температуре, то термоЭДС не возникает
Цепь со спаями представленная на рис. 93, состоящая из двух
разнородных проводников А и В называется термоэлектрическим преобразователем (ТЭП) или термопарой, проводники - термоэлектродами, а место соединения - спаями.
В
t0
А
tр
Рис. 93. Термоэлектрический преобразователь
Спай, имеющий температуру tр. называется горячим или рабочим, а второй, имеющий постоянную температуру t0 - холодным или
174
свободным. Термоэлектрический эффект объясняется наличием в
металле свободных электронов, число которых в единице объема
различно для разных металлов. В спае с температурой tр
электроны из металла А диффундируют в металл В в большем количестве, чем обратно. Поэтому металл А заряжается положительно, а металл В отрицательно.
Суммарная ТЭДС, возникающая при нагреве спаев проводников до температур tр и t0:
EAB(tр, t0) = ЕAB(tр) + ЕBA(t0),
где ЕBA(t0) и ЕAB(tр)- ТЭДС, обусловленная контактной разностью потенциалов и разностью температур концов А и В.
ТЭДС EAB(tр t0) является функцией от температуры горячего
спая tр при условии постоянства температуры холодного спая t0.
Термопары градуируются при определенной постоянной температуре t0 (обычно t0 = 0 °C или 20 °C). При измерениях температура
t0 может отличаться от градуировочного значения. В этом случае
вводится соответствующая поправка в результат измерения:
E`AB(tр t0) = EAB(tр t0) + ΔEAB(tр t0).
Поправка ΔEAB(tр t0) равна ТЭДС, которую развивает данная
термопара при температуре горячего спая tр и градуировочном значении температуры холодных спаев. Поправка берется положительной,
если tр > t0 и отрицательной, если tр < t0. Величина поправки может
быть взята из градуировочной таблицы.
Правильное измерение температуры возможно лишь при
постоянстве температур свободных спаев t0. Оно обеспечивается с
помощью соединительных проводов и специальных термостатирующих устройств. Соединительные провода в данном случае
предназначены для переноса свободных концов термопары в зону
с известной постоянной температурой, а также для подсоединения свободных концов термопары к зажимам измерительных
приборов. Соединительные провода должны быть термоэлектрически подобны термоэлектродам термопары. Как правило, соединительные провода для термопар, изготовленных из неблагородных металлов, выполняются из тех же самых материалов, что и
175
термоэлектроды. Исключение составляет хромель-алюмелевая
термопара, для которой с целью уменьшения сопротивления линии в качестве соединительных проводов применяется медь в паре с
константаном.
Конструктивное исполнение термопар разнообразно и зависит
главным образом от условий их применения. При необходимости измерения небольшой разницы температур или получения большой
ТЭДС применяются дифференциальные термопары и термобатареи,
представляющие собой несколько последовательно соединенных
термопар.
При изготовлении термопар применяются металлы, к которым
предъявляются следующие требования:
− воспроизводимость;
− высокая чувствительность;,
− надежность;
− стабильность;
− достаточный температурный диапазон.
Материалы, используемые для изготовления термопар представлены в табл. 6.
ТЭДС, мВ
Название
Состав
(t0=0 °C и t1=100 °C)
Сурьма
Sb
+4.7
Нихром
65 % Ni +20 % Cr
+ 2.2
+15Si (Mn, Fe)
Железо
Fe
+ 1.8
Медь
Cu
+0.76
Алюминий
Al
+0.4
Палладий
P
-0.57
Платина
Pt
0
Никель
Ni
-1.5
Алюмель
95 % Ni + 5 % Al
-1.2
Платинородий 60%Au+,30%Pd+,10 %Pt
-2.31
Платинородий 90 % Pt + 10 % Rh
+0,86
Константан
60 % Cu + 40 % Ni
-3,4
Копель
56 % Cu + 44 % Ni
-4.5
Пирит
46,6 % Fe + 53,4 % S
-12.1
Хромель
10 % Cr + 90 % Ni
+2,95
176
Таблица 6
Максимальный
темпер. предел, °C
350
1300
1000
1300
600
600
1000
При конструировании термопар стремятся сочетать термоэлектроды с различной полярностью ЭДС.
Технические термоэлектрические преобразователи с металлическими термоэлектродами делятся на следующие виды.
1. Платинородий-платиновые (тип ТПП). Диапазон измеряемых
температур 0 – 1300 °C. Преобразователи типа ТПП надежно работают в нейтральной и окислительных средах, но быстро выходят из
строя в восстановительной среде. К недостаткам преобразователей
этого типа следует отнести малую термоЭДС по сравнению с термоЭДС других ТЭП. Диаметр термоэлектродной проволоки, применяемой для ТЭП данного типа, составляет 0,3 или 0,5 мм. В зависимости
от назначения эти термоэлектрические преобразователи разделяют на
эталонные, образцовые и рабочие.
2. Платинородий (30 % родия) - платинородиевый (6 % родия)
ТЭП (тип ТПР). Особенностью преобразователя данного типа является то, что он развивает очень малую термоЭДС (0,04 мВ при 120 °С и
0,002 мВ при 20 °С), что не требует поправки на температуру холодных спаев. Диапазон измеряемых температур 300 – 1600 °C.
3. Хромель-алюмелевый (тип ТХА) Эти ТЭП применяют для
измерения температур -200 - 1000 °С. Кривая зависимости термоЭДС для данного преобразователя близка к прямой. ТЭП типа ТХА
хорошо работает в окислительных средах и сравнительно быстро
разрушается в восстановительной среде.
4. Хромель-копелевый (тип ТХК). Эти ТЭП развивают наибольшую термоЭДС из всех стандартизованных ТЭП, что позволяет изготовлять измерительные комплекты с узкой температурной шкалой,
например -50 - 300 °С.
Стандартные ТЭП типа ТХК и ТХА изготавливают из термоэлектродной проволоки диаметром от 0,7 до 3,2 мм.
5. Вольфрамрениевый (5 и 20 % рения) преобразователь (тип
ВР-5/20). Применяют для измерения температуры 0 - 2200 °С в нейтральной и восстановительной средах, а также для измерения температуры расплавленных металлов.
177
Иногда применяются и нестандартизованные преобразователи.
Из них наиболее широко распространены медь - копелевые, железо константановые и медь - константановые ТЭП. Нестандартизованные
ТЭП после изготовления подвергают обязательной индивидуальной
градуировке.
Пример градуировочных характеристик термопар представлен
на рис. 94.
Рис. 94. Градуировочные характеристики термопар
Конструктивно термопары выполняются в виде трех модификаций: с изолированным (от корпуса) спаем (рис. 95, а), с неизолированным спаем (рис. 95, б), с открытым спаем (рис. 95, в).
Рис. 95. Модификации термопар: а - с изолированным спаем;
б - с неизолированным спаем; в - с открытым спаем
178
Назначение корпуса - защита термоэлектродов от механических и физико-химических воздействий среды. Внутреннее пространство термопары для лучшей теплопроводности заполнено порошком
окиси алюминия (AI2O3). Вид конструктивного оформления влияет на
динамические характеристики. Наиболее быстродействующей является конструкция с открытым спаем.
Существует модификация термопары - термоэлектрический кабель, состоящий из металлической оболочки (например, нержавеющей стали) и термоэлектродов. Внутреннее пространство заполнено
порошком AI2O3 (рис. 96). На основе таких кабелей можно реализовать любую конструкцию термопары. При внешнем диаметре кабеля
1,5 ÷ 2,0 мм термопара с неизолированным спаем имеет постоянную
времени нагрева τ = 0,05 с, а с изолированным - 0,2 с.
Рис. 96. Термоэлектрический кабель
Из-за изменения температуры свободных концов термопары
возникает дополнительная погрешность измерения температуры.
Термопара градуируется при tо = 0, поэтому при отклонении tо от нуля и возникает погрешность. Из-за нелинейности зависимости Е = f(t)
поправка не будет равна tо.
Для определения поправки Δt = f(tо) существуют градуировочные кривые (таблицы) по которым находится ΔE = f(tо), вычисляется
Е = Еизм.+ ΔE(tо) и по нему определяется t.
179
Термостатирование холодного спая технически неудобно. Поэтому существует схемотехнический способ (рис. 97) компенсации
температуры холодного спая.
Рис. 97. Схема компенсации температуры холодного спая
Термосопротивление R0 имеет температуру холодного спая,
при изменении которой изменяется компенсирующее напряжение Uк.
Сопротивление моста и напряжение U подобраны таким образом, что
закон изменения напряжения Uк от температуры, окружающей холодные спаи термопары, автоматически повторяет изменения ЭДС
холодных спаев и компенсирует ее.
Когда в измерительной системе необходимо соединить много
одинаковых термопар, рассмотренный метод может быть неприемлем. Кроме того, компенсационные (удлинительные) провода могут
быть достаточно дороги. Тогда каждая термопара соединяется с измерительным прибором медными проводами, а температура холодного спая измеряется отдельной термопарой, образуемой удлинительными проводами .
Особенности измерения температуры с помощью термопар.
1. Малый сигнал постоянного напряжения на зажимах термопары (от 70 до 1,5 мкВ/град).
2. Изменение температуры холодных концов термоэлектродов.
3. Инородность проводников, подключающих измерительный
прибор к термопаре (лучше компенсационными проводами).
4. Нестабильность характеристик во времени.
5. Влияние внешних магнитных полей.
6. Влияние ионизирующего излучения.
7. Воздействие внешнего давления.
180
8. Степень воспроизводимости статических характеристик.
9. Влияние эффекта Томпсона.
Временная нестабильность возникает из-за изменения физикохимической однородности электродов (коррозия, деформация и т. п.).
Хорошей временной стабильностью обладают химически чистые металлы.
Влияние магнитных полей связано с эффектом Нернста- Эттингехаузена: если электрический проводник находится в температурном поле ∇t в присутствии поперечного магнитного поля H, то в
нем возникает электрическое поле Eэл=Q∙∇t∙В, где Q - коэффициент.
Вывод: при наличии магнитных полей нужно выбирать неферромагнитные проводники, экранировать и по возможности ориентировать
термопару так, чтобы ∙∇t и Н были параллельны, тогда ∙∇t∙Н=0.
Гидростатическое давление существенно влияет на термоЭДС.
Так, для ТХА при давлении 50 кбар ошибка достигает 4 %. Нужно
применять защитный кожух.
Лучше всего воспроизводятся статических характеристики
термопар из химически чистых металлов. Допустимые отклонения
нормируются государственным стандартом. Чем точнее термопара,
тем дороже (цена может отличаться на порядок).
Термопары являются датчиками и не показывают измеренное
значение температуры (ТЭДС), поэтому в комплектах с термоэлектрическими термометрами применяются вторичные показывающие приборы: пирометрические милливольтметры или потенциометры.
При измерении милливольтметром используется метод непосредственной оценки. Пирометрические милливольтметры являются
электро-измерительными
приборами
магнито-электрической
системы.
В конструкции
пирометрических
милливольтметров
(рис. 98) можно выделить магнитную и подвижную системы. Первая
состоит из подковообразного магнита 1, полюсных наконечников 2 и
цилиндрического сердечника 3.
181
1
3
2
4
I
Е(tр t0)
Рис. 98. Принципиальная схема милливольтметра
Кольцевой зазор между сердечником и полюсными наконечниками магнита характеризуется наличием практически равномерного
электромагнитного поля. В этом зазоре соосно с сердечником размещается рамка 4, которая монтируется на кернах, опирающихся на
подпятники, либо на натянутых нитях. Момент сил, противодействующий вращению рамки создается специальными пружинами. С
подвижной рамкой соединена указательная стрелка 5 совмещенная со
шкалой проградуированной в градусах.
Взаимодействие тока I, протекающего по рамке 4 с полем постоянного магнита 2 вызывает появление вращающего момента М, который, будучи уравновешен противодействующим моментом пружин,
поворачивает рамку на определенный угол φ:
М = С·В·I,
где С – константа зависящие от геометрических размеров рамок и
числа витков; В – магнитная индукция.
Угол поворота рамки со стрелкой φ пропорционален величине
протекающего по рамке тока I, который пропорционален термоЭДС
термопары: I = f ((E(tр t0)).
Потенциометры в отличие от милливольтметров работают по
компенсационному (нулевому) методу измерения. Принципиальная
схема потенциометра представлена на рис. 99.
182
Принцип компенсации при измерении ТЭДС заключается в
уравновешивании ее известным напряжением ∆U на калибровочном
резисторе RАВ, созданным вспомогательным источником тока. Ток от
вспомогательного источника Е проходит по цепи, в которую между
точками А и В включен реохорд RAB. Разность потенциалов ΔU пропорционально RАВ (в точке D находится движок реохорда).
Последовательно с термопарой, генерирующей ТЭДС, включен
милливольтметр НП (нуль-прибор) с нулем в середине шкалы. Передвигая движок D реохорда RАВ можно найти такое положение движка, что ΔU и E(tр t0) уравновесятся и НП будет показывать ноль. Если
совместить шкалу проградуированную в градусах с реохордом RАВ,
то положение движка реохорда относительно этой шкалы, покажет
измеряемую температуру.
Е
RАВ
А
В
D
НП
ΔU
Е(t t0)
Рис. 99. Схема потенциометра
183
Схема автоматического потенциометра (КСП) представлена на
рис. 100.
Е(tp to)
А
Rр
Rн
Rк
Rш
Rп
В
ИПС
Rм
D
Rб
С
УЭД
Rс
Рис. 100. Схема автоматического потенциометра
Здесь приняты следующие обозначения:
Rp - сопротивление реохорда;
Rш - сопротивление шунта;
Rп - сопротивление для задания пределов измерения;
Rн и Rк - сопротивления для задания начала и конца шкалы;
Rб – балластное сопротивление;
Rс - сопротивление для поверки рабочего тока;
Rм - медное сопротивление для компенсации влияния температуры холодных спаев;
ИПС - источник питания стабилизированный;
УЭД – усилитель электродвигателя.
Потенциометр состоит из моста сопротивлений АВСD, в одну
из диагоналей которого включен источник питания ИПС (диагональ
ВС), а в другую (измерительную диагональ АD) термопара с
ТЭДС Е(tр t0) и
электродвигатель
с
усилителем УЭД. В
вершине А моста находится реохорд Rр, к движку которого прикреплена стрелка, движущаяся вдоль шкалы. Перемещением движка
в свою очередь управляет электродвигатель.
184
Мост может находится в двух состояниях: уравновешенном и
неуравновешенном. Когда мост находится в равновесии, то напряжение между его вершинами AD равно по модулю термоЭДС (UAD = Е)
и напряжение небаланса ΔU, подаваемое на усилитель УЭД, равно
нулю:
ΔU = UAD – Е = 0.
В данном состоянии ЭД не работает. Если по каким-либо причинам термоЭДС Е изменится, то мост выходит из равновесия и на
входе усилителя УЭД появится напряжение небаланса ΔU ≠ 0. Усилитель, усилив напряжение, подает его на ЭД (электродвигатель), который, вращаясь, перемещает движок реохорда. перемещение движка
продолжается до тех пор, пока мост снова не придет в равновесие и
напряжение на ЭД снова не станет равно нулю.
В этих потенциометрах процесс компенсации осуществляется
автоматически, непрерывно и с большой скоростью. Эти приборы
имеют устройства для автоматического внесения поправки на температуру холодных спаев термопары.
17.1.7. Пирометрические термометры
Пирометры излучения основаны на измерении мощности теплового излучения объекта, преимущественно в диапазонах инфракрасного излучения и видимого света. Верхний предел измерения
температуры пирометра излучения практически не ограничен. Измерение основано на бесконтактном способе, поэтому отсутствует искажение температурного поля, вызываемого введением преобразовательного элемента прибора в измеряемую среду. Возможно измерение температуры пламени и высоких температур газовых потоков
при больших скоростях и на расстоянии.
Первый пирометр (оптический) изобрёл голландский физик
Питер ван Мушенбрук (1731).
Изначально термин использовался
применительно к приборам, предназначенным для измерения температуры визуально, по яркости и цвету сильно нагретого (раскалённого) объекта. В настоящее время смысл несколько расширен, в частности, некоторые типы пирометров (инфракрасные радиометры) измеряют достаточно низкие температуры (0 °C и даже ниже).
185
К пирометрическим термометрам относят: оптические пирометры, радиационные пирометры, пирометры полного излучения, автоматические инфракрасные термометры, термометры непрерывного
излучения, линейные сканеры, тепловизионные радиометры, поверхностные пирометры, пирометры отношения, двухцветовые пирометры и т. п. Эти наименования больше связаны с назначением
приборов.
Несмотря на то что по точности пирометры сильно уступают
контактным датчикам температуры, они незаменимы там, где необходимо быстро и безопасно сделать измерение температуры
поверхности.
По спектральному диапазону пирометры условно можно
разделить:
− на монохроматические (оптические, яркостные);
− полного излучения (радиационные);
− спектрального отношения (цветовые).
Монохроматический пирометр - пирометр, принцип действия
которого основан на использовании зависимости спектральной энергетической яркости тела от его температуры.
Позволяет визуально определять без использования специальных устройств, температуру нагретого тела, путем сравнения его цвета с цветом эталонной нити.
Наиболее распространенным яркостным пирометром является
пирометр с исчезающей нитью, схема которого показана на рис. 101.
Оптическая система пирометра представляет собой телескоп с
объективом (1) и окуляром (4). Перед окуляром помещен красный
светофильтр (3).
Спектральная
характеристика
пропускания
светофильтра подбирается с учетом спектральной чувствительности
глаза так, чтобы при рассматривании объекта через светофильтр
наибольшая видимая яркость соответствовала бы длине волны около
0,65 мкм.
186
Рис. 101. Устройство оптического пирометра с исчезающей нитью:
а – пирометр, б - нить
В фокусе объектива находится вольфрамовая нить пирометрической лампочки 5. Нить лампочки питается от аккумулятора; ее накал можно регулировать вручную реостатом 6. В поле зрения телескопа наблюдатель видит участок излучающей поверхности накаленного тела (объекта измерения) и на этом фоне – нить лампочки
(рис.101, б). Если яркости нити и накаленного тела неодинаковы,
нить будет видна более темной или более светлой, чем фон. Регулируя накал нити реостатом, наблюдатель добивается равенства яркостей, при этом изображение нити сольется с фоном и станет неразличимо (нить "исчезнет"). В этот момент яркостная температура нити
равна яркостной температуре объекта измерения. Глаз весьма чувствителен к различению яркостей и момент "исчезновения" нити улавливается с достаточной уверенностью. Показывающий прибор 8,
включенный в цепь нити накаливания, градуируется по образцовому
пирометру или по температурным лампам, в °С яркостной
температуры.
Если объект измерения по своей излучающей способности близок к абсолютно черному телу, то показываемая пирометром яркостная температура равна истинной температуре объекта. Однако излучающая способность реальных физических тел не достигает излучающей способности абсолютно черного тела. Поэтому при одинако187
вой яркости излучения, т. е. при одинаковой яркостной температуре,
истинная температура Т реального физического тела будет выше яркостной температуры ТS, показываемой оптическим пирометром.
Соотношение истинной Т и яркостной температур Тs определяется выражением:
1 1 λ
1
− = ln
,
Ts T c2 ε λ
где λ - длина волны света, в котором измеряется яркостная температура (для оптических пирометров обычно λ=0,65 мкм); с2=1,438
см/град – постоянная; ελ - коэффициент излучательной способности
(коэффициент черноты 0 < ελ < 1) реального тела для длины волны λ.
Более простая схема оптического пирометра показана на
рис. 102.
Рис. 102. Устройство яркостного пирометра с исчезающей нитью: Мисточник тепла; О1 ,O2 - фокусирующие линзы; G - нитью накала
лампы; S, F - светофильтры; AZ - показывающий прибор
Стандартный диапазон измерений пирометра с исчезающей нитью составляет свыше 650 до 2500 °С, а с использованием дополнительных светофильтров и более.
В радиационных пирометрах регистрируется суммарная тепловая электромагнитная энергия (полная) излучения со всеми длинами
волн, поступающая в объектив пирометра.
В 21 веке радиационные пирометры с инфракрасным диапазоном измерения стали называть ИК-термометрами, что означает инфракрасные радиационные термометры.
188
Приборы, дающие возможность получить изображение распределения температуры на основе ИК-излучения по поверхности объекта
называют тепловизорами или тепловизионными камерами.
Большинство современных ИК термометров представляют собой портативные и, как правило, очень простые в обращении приборы. с специальным лазерный целеуказателем для точного наведения
на объект измерения.
В общем случае радиационный пирометр представляет собой
устройство, которое содержит оптическую систему, преобразователь
энергии излучения (детектор) и электронную схему для согласования
преобразователя с последующими блоками (рис. 103).
Рис. 103. Принципиальная схема радиационного пирометра
Тепловой поток фокусируется сферическим зеркалом на
детектор (термопара, термометр сопротивления) который преобразованную тепловую информацию передает на устройство вывода
(показывающий прибор)
Полная мощность излучения Р на единицу поверхности абсолютно черного тела при температуре T(К) определяется выражением
P= σT4, где σ – постоянная Стефана – Больцмана.
Реальные тела имеют меньшие излучения, поэтому вводится
поправочный коэффициент, называемый степенью черноты.
Схема современного радиационного пирометра с оптическим
видоискателем изображена на рис. 104.
189
Рис. 104. Схема радиационного пирометра: 1 - объект измерения; 2 - тепловое излучение; 3 - оптическая система; 4 - зеркало; 5 - видоискатель; 6 - ось
видоискателя; 7 - измерительно-счетное устройство; 8 - корпус; 9 - электронный преобразователь; 10 - кнопка; 11 - датчик
Тепловой луч, сфокусированный оптической системой, падает
на датчик (первичный пирометрический преобразователь), в результате на выходе образуется электрический сигнал, пропорциональный
значению температуры объекта измерения. Этот сигнал проходит через электронный преобразователь (вторичный пирометрический преобразователь), попадает в измерительно-счетное устройство и обрабатывается в нем. Результат отображается на дисплее (индикация у
современных пирометров, как правило, цифровая).
Чтобы получить точное значение температуры объекта, пользователю нужно лишь включить прибор, навести его на объект измерения и нажать на кнопку. Измерения можно проводить практически
на любом расстоянии, дальность действия современных пирометров
ограничивается только площадью измеряемого пятна и прозрачностью среды.
Оптическим разрешением (показатель визирования) пирометра
называют отношение диаметра светового пятна и расстояния до объекта измерения (рис. 105). В технической документации к пирометру
обычно указывается конкретное значение показателя визирования
или приводится диаграмма направленности.
190
Рис. 105. Оптическое разрешение пирометра
Диаметр измеряемого пятна определяется оптическим разрешением и зависит от расстояния между пирометром и объектом измерения (S=k·D, где k - показатель визирования, D — расстояние до объекта). Минимальный диаметр пятна соответствует наименьшему размеру
объекта, который может быть измерен этим пирометром на заданном
расстоянии. Чем больше величина оптического разрешения (S/D), тем
более мелкие предметы может различать пирометр. Точность измерения не зависит от расстояния до объекта до тех пор, пока диаметр измеряемого пятна меньше размера объекта. Если же диаметр пятна становится больше, прибор начинает принимать излучение от других
объектов, и это оказывает значительное влияние на результаты
измерения.
В области высоких температур возможности радиационного и
яркостного пирометра практически идентичны, но радиационный пирометр обеспечивает возможность измерений при значительно более
низких температурах, до –50 оС.
По сравнению с яркостными, радиационные пирометры отличаются большей простотой устройства и меньшей стоимостью. Погрешность радиационных термометров обычно около ±0,5 %.
Действие цветовых пирометров основано на том, что с изменением температуры меняется цвет накаленного тела. При этом, если
выделить в спектре излучения накаленного тела два монохроматических излучения с длинами волн λ1 и λ2 (соответствующих, например,
191
красному и синему свету), то с изменением цвета будет меняться соотношение яркостей этих излучений.
Для абсолютно черного тела отношение монохроматических
яркостей излучений длин волн λ1 и λ2 будет:
−5
c2 1
1
−
λ
R y = 1 e T λ1 λ2 .
λ2
Для нечерного тела, обладающего в длинах волн λ1 и λ2 неодинаковыми коэффициентами излучательной способности ε1 и ε2 отношение яркостей будет
ε
R = 1 ⋅ R y .
ε2
Отношение монохроматических яркостей для двух заданных
длин волн является однозначной функцией абсолютной температуры
тела Т. В цветовых пирометрах измерение температуры осуществляется по величине отношения монохроматических яркостей накаленного тела в красной и синей областях спектра.
Принципиальная упрощенная схема цветового пирометра ЦЭП3 представлена на рис. 106.
Рис. 106. Схема цветового пирометра
Излучение объекта измерения через защитное стекло 1 и объектив 2 падает на фотоэлемент 4. Между объективом и фотоэлементом
192
установлен вращающийся диск (обтюратор) 3, в который вставлены
два светофильтра – красный и синий. Благодаря этому фотоэлемент
попеременно освещается красным и синим светом и выдает поочередно импульсы тока, пропорциональные монохроматическим яркостям
красного и синего излучений накаленного тела. Эти импульсы усиливаются усилителем 5 и преобразуются специальным электронным логарифмирующим устройством 6 в постоянный ток, сила которого пропорциональна величине lnR, т. е. линейно зависит от обратной величины абсолютной температуры тела1/Т. Выходной ток логарифмирующего устройства измеряется и регистрируется показывающим устройством 7, шкала которого градуирована в градусах. Прибор градуируется по абсолютно черному телу, поэтому его показания соответствуют истинной температуре абсолютно черного тела, а также "серых"
тел.
В отличие от пирометров с исчезающей нитью на показания
цветового пирометра практически не влияют изменения
коэффициента излучающей способности тела, обусловленные изменением его температуры, состояния поверхности, состава и другими
причинами, а также не влияет ослабление излучения не вполне прозрачной атмосферой между объектом и датчиком. Благодаря
этому цветовой пирометр обеспечивает высокую точность измерения: основная погрешность при измерении температуры "серых"
тел не превышает ±1 %.
Диапазон измерения цветовых пирометров от 1400 до 2500 °С
и выше.
17.1.8. Диэлектрические измерители температур
В диэлектрических измерителях температуры используется зависимость изменения емкости С от температуры. Для плоского
конденсатора емкость равна:
C=
εo ⋅ε ⋅ s
,
d
где s - площадь поверхности пластин; ε0 - диэлектрическая проницаемость воздуха; d - расстояние между пластинами. Диэлектриче193
ская проницаемость сегнетоэлектрика ε зависит от температуры Т, т.
е. ε = f(T).
Крутизна преобразования емкостных керамических датчиков,
их конструктивное оформление и динамические характеристики подобны термисторам. Преимуществом диэлектрических датчиков перед резистивными датчиками является меньшая погрешность от разогрева. Кроме того, конденсаторные датчики не подвержены влиянию магнитных полей.
17.2. Методы и приборы измерения давления и разряжения
Давление является важным параметром систем контроля и
управления производственными процессами.
Давление - физическая величина характеризующая интенсивность
действия нормальной составляющей (перпендикулярно к поверхности)
силы dF действующей на малый элемент поверхности, к его
площади dS:
dF
P=
.
dS
Среднее давлением Pср - это предел отношения нормальной составляющей усилия F к площади всей поверхности S, на которую
действует усилие:
F
Pср = .
S
За единицу измерения давления в Международной системе
единиц (СИ) принят Паскаль (Па) в честь французского физика и математика Блеза Паскаля, это давление, действующее равномерно с
силой 1 ньютон на площадь 1м2:
1 Па = 1 Н/1 м2.
Десятичные кратные и дольные единицы образуют с помощью
стандартных приставок СИ и приведены в табл. 7.
В настоящее временя используются также и внесистемные единицы: кгс/см2, мм вод. ст. и бар. Эти единицы связаны следующими
соотношениями представленными в табл. 8.
194
Таблица 7
Кратные
величина
название
101 Па
декапаскаль
2
10 Па гектопаскаль
103 Па
килопаскаль
106 Па
мегапаскаль
9
10 Па
гигапаскаль
1012 Па терапаскаль
1015 Па петапаскаль
1018 Па эксапаскаль
1021 Па зеттапаскаль
1024 Па иоттапаскаль
обозначение
даПа daPa
гПа hPa
кПа kPa
МПа MPa
ГПа GPa
ТПа TPa
ППа PPa
ЭПа EPa
ЗПа ZPa
ИПа YPa
величина
10−1 Па
10−2 Па
10−3 Па
10−6 Па
10−9 Па
10−12 Па
10−15 Па
10−18 Па
10−21 Па
10−24 Па
Дольные
название
деципаскаль
сантипаскаль
миллипаскаль
микропаскаль
нанопаскаль
пикопаскаль
фемтопаскаль
аттопаскаль
зептопаскаль
йоктопаскаль
обозначение
дПа dPa
сПа
cPa
мПа mPa
мкПа µPa
нПа nPa
пПа pPa
фПа fPa
аПа aPa
зПа
zPa
иПа yPa
Стандартная, нормальная или физическая атмосфера (атм,
atm) - в точности равна 101325 Па или 760 миллиметрам ртутного
столба. Давление, уравновешиваемое столбом ртути высотой 760 мм
при 0 °C, плотность ртути 13595,1 кг/м³ и нормальное ускорение свободного падения 9,80665 м/с².
1 Па
1 бар
1 ат
1 атм
1 мм
рт.
ст.
1м
вод.
ст.
1 psi
Паскаль
(Pa, Па)
Бар
(bar, бар)
1
105
98066,5
101325
10−5
1
0,980665
1,01325
Таблица 8
Миллиметр
Метр
Техническая Физическая ртутного
Фунт-сила
водяного
атмосфера атмосфера
столба
на кв. дюйм
столба
(at, ат)
(atm, атм) (мм рт. ст.,
(psi)
(м вод. ст.)
torr, торр)
10,197×10−6 9,8692×10−6 7,5006×10−3 1,0197×10−4 145,04×10−6
1,0197
0,98692
750,06
10,197
14,504
1
0,96784
735,56
10
14,223
1,033
1
760
10,33
14,696
133,322 1,3332×10−3 1,3595×10−3 1,3158×10−3
9806,65 9,80665×10−2
0,1
0,096784
6894,76 68,948×10−3 70,307×10−3 68,046×10−3
1
13,595×10−3 19,337×10−3
73,556
1
1,4223
51,715
0,70307
1
195
Ускорение свободного падения на поверхности земли варьируется от 9,780 м/с² на экваторе до 9,832 м/с² на полюсах. Стандартное значение g = 9,80665 м/с² было определено как «среднее» на всей
Земле, на широте 45,5° на уровне моря.
Техническая атмосфера (ат, at, кгс/см²) - равна давлению, производимому силой 1 кгс, направленной перпендикулярно и равномерно распределённой по плоской поверхности площадью 1 см²
(98066,5 Па).
На практике применяют приближённые значения:
1 атм ≈ 0,1 МПа;
1 МПа ≈ 10 атм;
1 мм вод. ст. ≈ 10 Па.
При измерении давления необходимо различать абсолютное,
избыточное и атмосферное давление (барометрическое), а также вакуум.
Нормальное атмосферное давление принято считать равным
760 мм ртутного столба, или 101325 Па.
Абсолютное давление Рабсол - параметр состояния вещества
(жидкостей, газов и паров). При измерении Рабсол за начало отсчета принимается нулевое давление, которое можно себе представить
как давление внутри сосуда после полной откачки воздуха. Естественно, достигнуть Рабсол = 0 невозможно.
Барометрическое давление Рбар - давление, оказываемое атмосферой на все находящиеся в ней предметы.
Избыточное давление Ризб - разность между абсолютным давлением Рабсол и атмосферным давлением Рбар (т. е. давлением окружающей среды)
Ризб = Рабсол – Рбар.
Если абсолютное давление ниже атмосферного, то давление Рвак
- называется разряжением.
Рвак = Рбар - Рабсол.
Глубокое разряжение принято называть вакуумом.
Все приборы для измерения давления классифицируются по
принципу действия и по роду измеряемой величины.
По принципу действия:
1) жидкостные, основанные на уравновешивании давления
столбом жидкости);
196
2) деформационные, измеряющие давление по величине деформации различных упругих элементов или по развиваемой силе;
3) поршневые, измеряемое давление уравновешивается внешней силой, действующей на поршень;
4) электрические, основанные или на преобразовании давления
в какую-либо электрическую величину, или на изменении электрических свойств материала под действием давления.
По роду измеряемой величины:
1) манометры (приборы для измерения абсолютного и избыточного давления);
2) вакуумметры (приборы для измерения давления разряжения);
3) мановакуумметры (приборы для измерения избыточного
давления и давления разряжения);
4) напорометры (приборы для измерения малых избыточных
давлений);
5) тягомеры (приборы для измерения малых давлений
разряжения);
6) тягонапорометры (приборы для измерения малых избыточных давлений и разрежений);
7) дифманометры (приборы для измерения разности давлений);
8) барометры (приборы для измерения атмосферного давления).
17.2.1. Жидкостные манометры
Первооткрывателем создания прибора измерения давления
принадлежит крупнейшему итальянскому художнику и ученому Леонардо да Винчи (конец XV века), который впервые применил пьезометрическую трубку для измерения давления воды в трубопроводах.
Однако его труд «О движении и измерении воды» был опубликован
лишь в XIX веке и поэтому принято считать, что первый жидкостный
манометр был создан в 1643 г. итальянскими учеными Торричелли и
Вивиани, учениками Галилео Галилея, которые при исследовании
свойств ртути, помещенной в трубку обнаружили существование атмосферного давления. Так появился ртутный барометр. В течение
последующих 10-15 лет во Франции (Б. Паскаль и Р. Декарт) и Гер197
мании (О. Герике) были созданы различные разновидности жидкостных барометров, в том числе и с водяным заполнением.
Дальнейшее развитие науки и техники привело к появлению
большого количества жидкостных манометров различных типов,
применяемых до настоящего времени во многих отраслях промышленности.
Жидкостные манометры отличаются простотой конструкций и
сравнительно высокой точностью измерения. Их широко применяют
как в качестве переносных (лабораторных), так и технических приборов для измерения давления.
Самый простой переносный U-образный манометр, представляет собой согнутую в виде буквы U стеклянную трубку 1 заполненную
жидкостью (спиртом, водой, ртутью), прикрепленную на доске 2
со шкалой 3, расположенной между коленами трубки
(рис. 107). Один конец трубки соединен с полостью, в которой
измеряется давление, другой конец трубки сообщается с атмосферой. Под действием измеряемого давления жидкость в трубке
перемещается из одного колена в другое до тех пор, пока измеряемое
давление не уравновесится гидростатическим давлением столба жидкости в открытом колене. Если давление в полости, с которой соединен прибор, ниже атмосферного, то жидкость в коленах переместится
в обратном направлении, и высота ее столба будет соответствовать
вакууму. Присоединив оба колена трубки к полостям с различными
давлениями Р1 и Р2, можно определить перепад (разность) давлений.
Манометр заполняют жидкостью до нулевой отметки шкалы.
Для определения высоты столба жидкости плотностью ρ необходимо
сделать два отсчета (снижение в одном колене и подъем в другом) и
суммировать их величины, т. е. H= h1+h2, а измеряемое давление Р
будет: P=H∙ρ∙g.
198
Рис. 107. U -образный манометр
Чашечный (однотрубный) манометр является разновидностью
U-образного трубного манометра (рис. 108), у которого одна из
трубок заменена сосудом большого диаметра (чашкой).
Измеряется давление Р а, действующее на жидкость в широком сосуде, а
открытый конец трубки совмещен с атмосферой.
Рис. 108. Чашечный манометр
199
Уравнение равновесия: Р = ρ g (h + H).
Так как Н >> h, отсчет показаний можно вести только по h.
Чашечные и трубные манометры применяются для тарировки и
поверки рабочих приборов, реже - в качестве рабочих приборов.
Для измерения давлений, меньших 100 - 200 мм водяного столба применяются микроманометры (напорометры). Пример жидкостного напоромера с наклоненной трубкой под углом
α = 20…50°
показан на рис. 109.
Ра
h
L
α
Рис. 109. Жидкостной напоромер
Высота поднятия уровня жидкости в узкой трубке, определяется зависимостью h = L.sin(α), а измеряемое давление P = ρ.g.h.
Погрешность таких приборов составляет не более ±1,5 %.
В уравнения измерений жидкостных манометров в зависимости
от их точности необходимо вводить поправки, учитывающие отклонения условий эксплуатации от условий градуировки прибора. Условия эксплуатации определяются температурой и ускорением свободного падения в месте измерений. Под влиянием температуры изменяются как плотность жидкости, применяемой при уравновешивании
давления, так и длина шкалы. Ускорение свободного падения в месте
измерений, как правило, не соответствует его нормальному значению,
Поэтому истинное давление определяется:
g − gн
P = Ри ⋅ 1 + α ⋅ t − tнш + β ⋅ tнж − t +
,
gн
(
200
)
(
)
где Ри - измеренное манометром давление; t - температура шкалы и
жидкости во время измерений; t нш = 20 °С - температура, при которой
отградуирована шкала; t нж - температура плотности жидкости при
градуировки; α - температурный коэффициент линейного расширения материала шкалы; β - температурный коэффициент объемного
расширения жидкости; g - ускорение свободного падения в месте измерения; gн = 9,80665 м/с²- нормальное ускорение свободного падения.
В зависимости от материала для латуни α=19Е-6 °С-1, стали
α=11Е-6 °С-1, стекла α=8,5Е-6 °С-1.
17.2.2. Деформационные манометры
Деформационные манометры намного удобней и надежней для
использования, чем жидкостные. Простота, компактность, высокая
точность и широкий диапазон измерений (от 10 Па до 1-2 ГПа) поставили деформационные манометры на первое место в технике измерения давления, и способствовали широкому распространению
практически во всех отраслях промышленности.
Первый деформационный манометр с трубчатым чувствительным элементом был изобретен случайно. Рабочий, при изготовлении змеевика для дистилляционного аппарата, сплющил поперечное сечение цилиндрической трубки, изогнутой по спирали. Тогда, чтобы восстановить форму трубки, один конец ее заглушили, а в
другой конец насосом дали давление воды. При этом часть трубки с
деформированным сечением приняла цилиндрическую форму, а спираль на этом участке разогнулась. Этот эффект и был использован
немецким инженером Шинцем в 1845 г. для изготовления первого
трубчатого чувствительного элемента для измерения давления. Промышленное производство трубчатых деформационных манометров
было организовано французским фабрикантом Бурдоном, получившим в 1849 г. патент на изобретение одновитковой трубчатой пружины, именем которого она до сих пор часто называется («Бурдоновская трубка»). В 1850 г. Примавези и Шеффер изобрели мембранный
201
манометр, а несколько позже в 1881 г. Клейманом получен патент на
сильфонный манометр.
В деформационных приборах давление определяется по деформации упругих чувствительных элементов или по развиваемой ими
силе, которые преобразуются передаточными механизмами в угловое
или линейное перемещение указателя по шкале прибора. В качестве
упругих элементов используют трубчатые пружины, мембраны, мембранные коробки и сильфоны.
По виду упругого чувствительного элемента пружинные приборы делятся на следующие группы:
1) приборы с трубчатой пружиной (рис. 110, а, б);
2) мембранные приборы, упругим элементом которых служит
мембрана (рис. 110, в), мембранная коробка (рис. 110, г, д), блок
мембранных коробок (рис. 110, е, ж);
3) пружинно-мембранные с гибкой мембраной (рис. 110, з);
4) пружинно-сильфонные (рис. 110, и);
5) приборы с упругой гармониковой мембраной (сильфоном)
(рис. 110, к).
Рис. 110. Типы пружинных манометров: а – с одновитковой трубчатой
пружиной; б – с многовитковой трубчатой пружиной; в – с мембраной; г, д
– с мембранной коробкой; е, ж – с блоком мембранных коробок; з –
пружинно-мембранный с гибкой мембраной; к – пружинно-сильфонный
202
Приборы с чувствительным элементом в виде гофрированных
мембран, мембранных коробок и мембранных блоков применяют для
измерения небольших избыточных давлений и разрежений (манометры, напоромеры и тягомеры), а также перепадов давления (дифференциальные манометры). Зависимость прогиба мембраны от измеряемого
давления в общем случае нелинейная. Число, форма и размеры гофра
зависят от назначения прибора, пределов измерения и других
факторов.
Чтобы увеличить прогиб в приборах для малых давлений, мембраны попарно соединяют в мембранные коробки, а коробки в мембранные блоки. Мембранные коробки могут быть анероидными (рис.
110, г) и манометрическими (рис. 110, д). Анероидные
коробки, применяемые в барометрах, герметизированы и заполнены воздухом или инертным газом при давлении 1 Па. Деформация анероидной коробки происходит под воздействием разности давления окружающей ее среды и давления в полости коробки.
Так как давление в полости коробки очень мало, можно считать, что
ее деформация определяется атмосферным давлением. Деформация
анероидной или манометрической коробки равна сумме деформаций
составляющих ее мембран.
Другой вид упругих элементов манометров составляют особые
гофрированные коробки, называемые сильфонами. Сильфон представляет собой цилиндрический тонкостенный сосуд, на боковой поверхности которого выдавлены глубокие параллельные волны (рис.
110, к). При воздействии осевой нагрузки, внешнего или внутреннего
давления длина сильфона изменяется, увеличиваясь или уменьшаясь
в зависимости от направления приложенной силы. Для уменьшения
гистерезисных явлений внутри сильфона устанавливают пружину (рис.
110, и).
Одним из наиболее распространенных видов деформационных
приборов являются манометры с трубчатой пружиной (рис. 111).
203
Рис. 111. Схема манометра с трубчатой пружиной
Имерительная система манометра содержит одновитковую
трубчатую пружину 7, один конец которой герметично соединен с
держателем 7, а на другой конец с наконечником 5 смонтирована тяга
6, которая шарнирно соединена с зубчатым сегментом 4. Перемещение
наконечника трубчатой пружины преобразуется во вращение оси стрелочного указателя 2 с помощью насаженной на ось трубки 3 указателя,
находящейся в зацеплении с зубчатым венцом сегмента 4. При возрастании давления, подаваемого внутрь трубчатой пружины, последняя
разгибается, и стрелочный указатель поворачивается по часовой
стрелке относительно шкалы 9, нанесенной на циферблат, закрепленный на корпусе 10 манометра. Для корректировки угла поворота указателя относительно шкалы длины плеч шарнирно-рычажного механизма, состоящего из тяги 6 и зубчатого сегмента 4, юстируются зажимными винтами. Штуцером 8 манометр присоединяется к источнику давления.
Трубки манометров, рассчитанных на давление до 500 кПа (50
кгс/см2), изготовляют из меди, а трубки манометров, рассчитанных на
большее давление, - из стали.
Свойство изогнутой трубки некруглого сечения - изменять величину изгиба при изменении давления - обусловлено изменением формы
сечения. Под действием давления внутри трубки эллиптическое или
овальное сечение, деформируясь, приближается к круговому, что при204
водит к раскручиванию трубки, т. е. к угловому перемещению ее свободного конца. Это перемещение в определенных пределах пропорционально измеряемому.давлению. Поэтому максимальное рабочее давление манометра должно быть ниже предела пропорциональности с некоторым запасом прочности.
В соответствии с этим шкалу манометра (верхний предел измерения) выбирают таким образом, чтобы рабочий предел измерения
(наибольшее рабочее давление) был не менее 3/4 верхнего предела
измерения при постоянном давлении и не менее 2/3 верхнего предела
измерения при переменном давлении
Перемещение свободного конца трубки под действием давления
весьма невелико, поэтому в конструкцию прибора введен передаточный
механизм, увеличивающий масштаб перемещения конца трубки. Мембранные манометры наиболее удобны для измерения давления вязких
жидкостей или химически агрессивных сред.
17.2.3. Поршневые манометры
Первый поршневой манометр был применен для измерения
давления в 1833 г. Парротом и Ленцсм (Российская Академия наук)
при изучении сжимаемости воздуха и других свойств газов, причем
значение давления для того времени было очень большим (10 МПа).
В 1883 г. Рухгольц (Германия), организовал промышленный выпуск
таких приборов.
Простейший поршневой манометр представлен на рис. 112.
Манометр состоит из цилиндрического поршня 1, притертого к
цилиндру 2 с минимально возможным зазором. Если на нижний торец поршня действует измеряемое давление Р, то для его уравновешивания к поршню должна быть приложена сила F.
Уравнение равновесия с учетом силы трения на боковую поверхность поршня, возникшей при протекании жидкости или газа через зазор между поршнем и цилиндром под действием измеряемого
давления, имеет вид:
P ⋅ S = F − Fтр ,
где S – площадь поверхности поперечного сечения поршня; Fтр - сила жидкостного трения на боковую поверхность поршня.
205
Сила жидкостного трения Fтр пропорциональна действующему
давлению. Поэтому эффективная площадь не зависит от давления, а
следовательно, измеряемое давление прямо пропорционально уравновешивающей его силе F.
Поршневой манометр - манометр, в котором действующее на
поршень измеряемое давление преобразуется в силу и определяется
но значению силы, необходимой для ее уравновешивания.
В наиболее распространенных поршневых манометрах давление уравновешивается весом грузов. Такие манометры называются
грузопоршневыми.
Благодаря высокой точности и стабильности поршневые манометры находят преимущественное применение в качестве образцовых и эталонных приборов для поверки манометров.
Рис. 112. Поршневой манометр
При этом, как правило, давление, действующее на поршень,
уравновешивается весом грузов, который всегда можно определить с
необходимой для данных целей точностью.
206
17.2.4. Электрические манометры
Самым разнообразным и многочисленным классом приборов
для измерения давления, являются электрические манометры, в которых измеряемое давление преобразуется в какую-либо электрическую величину, или изменяет электрические свойства определенных
материалов.
Различают следующие основные методы измерения давления
электрическими манометрами:
− тензометрический;
− пьезорезистивный;
− емкостный;
− резонансный;
− индуктивный.
Наиболее распространёнными из электрических манометров
являются тензорометрические преобразователи, принцип действия
которых основан на свойстве материалов изменять свое электрическое сопротивление при механических деформациях, возникающих
под действием приложенной силы. Величина тензоэффекта проводников определяется в основном изменением геометрических размеров резистора (проволоки, пленки), а полупроводников - удельного
сопротивления вследствие изменения эффективной массы и подвижности носителей тока.
Тензорезистивные свойства полупроводникового кремния и германия были обнаружены лишь в 1959 году, а в 1960 году уже началось
серийное производство полупроводниковых тензодатчиков.
Применение полупроводниковых тензорезисторов вместо металлических в датчиках механических величин позволяет на один-два
порядка повысить чувствительность и величину выходного сигнала
датчиков. Это дает возможность обходиться без усилительной аппаратуры, упрощает конструкцию датчиков, расширяет их рабочие
диапазоны. В настоящее время перспективными в тензометрии являются и полупроводниковые материалы на основе моносульфида самария SmS (моносульфид самария)
Проволочные тензорезисторы выпускаются в виде проводников,
жестко связанных с бумажной или пленочной основой (рис. 113).
207
Проводник 3 представляет собой зигзагообразно уложенную
тонкую проволоку (медные, никелевые, железные и др) диаметром
0,02-0,05 мм, к концам которой пайкой или сваркой присоединяются
выводы (медные проводники 4).
Проводники закрываются бумагой, пленкой или лаком 1.
После наклеивания подложки 2 тензорезистора на исследуемую
деформируемую поверхность, деформация этой поверхности передается проводникам и приводит к изменению их сопротивления.
Сопротивление R резистора, выполненного в виде проволоки
длиной l, определяется выражением:
R = ρ·l/ΔS,
где ρ - удельное сопротивление материала проволоки; S – площадь
поверхности поперечного сечения проволоки.
Рис. 113. Конструкция проволочного тензорезистора
Изменение l и S приводит к изменению сопротивления тензорезистора.
Полупроводниковые тензорезисторы изготавливаются на основе чувствительных элементов выполненных в виде сверхтонкой прямоугольной плёнки монокристалла кремния на подложке из сапфира
(КНС), припаянной твердым припоем к титановой мембране
(рис. 114).
208
Рис. 114. Конструкция полупроводникового тензорезистора
Чувствительный элементом датчика давления служит мембрана
с тензорезисторами, которые соединены в мостовую схему. Под действием давления измеряемой среды мембрана прогибается, тензорезисторы меняют свое сопротивление, что приводит к разбалансу моста Уитстона. Разбаланс линейно зависит от степени деформации резисторов и, следовательно, от приложенного давления.
Достоинство таких датчиков - хорошая защищенность чувствительного элемента от воздействия любой агрессивной среды и низкая
стоимость, а недостаток - существенные гистерезисные эффекты от
температуры.
В основе пьезорезистивного метода лежит пьeзо-резистивный
эффект, когда кристалл кремния изменяет свое сопротивление в зависимости от степени давления.
Кремниевый интегральный преобразователь давления (ИПД) на
основе монокристаллического кремния представляет собой мембрану
из монокристаллического кремния с диффузионными пьезорезисторами, подключенными в мост Уитстона (рис. 115). Чувствительным
элементом служит кристалл ИПД, установленный на диэлектрическое основание с использованием легкоплавкого стекла или методом
анодного сращивания.
209
Рис. 115. Кремниевый интегральный преобразователь давления
Для измерения давления чистых неагрессивных сред применяются так называемые дешевые решения, основанные на использовании чувствительных элементов либо без защиты, либо с защитой силиконовым гелием (рис. 116).
Рис. 116. Манометр для измерения давления неагрессивных сред
Для измерения давления агрессивных сред и большинства промышленных применений применяется преобразователь давления в
герметичном металлостеклянном корпусе, с разделительной диафрагмой из нержавеющей стали, передающей давление измеряемой
среды на ИПД посредством кремнийорганической жидкости
(рис. 117).
210
Рис. 117. Манометр для измерения давления агрессивных сред
Мембраны могут быть металлическими или керамическими.
Мембрана может контактировать с кристаллом непосредственно или
передавать давление гидравлически через силиконовое масло или
кремнийорганическую жидкость.
Датчики на основе этой технологии имеют различные размеры
и конфигурацию. Они чувствительны к температуре и обычно имеют
возможность ее измерения с целью последующей корректировки результатов измерений.
Основным преимуществом пьезорезистивных датчиков является более высокая стабильность характеристик по сравнению с
тензометрическими. ИПД на основе монокристаллического кремния устойчивы к воздействию ударных и знакопеременных нагрузок.
Если не происходит механического разрушения чувствительного
элемента, то после снятия нагрузки он возвращается к первоначальному состоянию, что объясняется использованием идеально-упругого
материала.
Емкостные преобразователи используют метод изменения емкости конденсатора при изменении расстояния между обкладками.
Известны керамические или кремниевые емкостные первичные преобразователи давления и преобразователи, выполненные с использованием упругой металлической мембраны. При изменении давления
мембрана с электродом деформируется и происходит изменение емкости.
В элементе из керамики или кремния пространство между обкладками обычно заполнено маслом или другой органической жидкостью (рис. 118).
211
Рис. 118. Емкостный датчик давления
Достоинством чувствительного емкостного элемента является
простота конструкции, высокая точность и временная стабильность,
возможность измерять низкие давления и слабый вакуум, долговечность, устойчивость к вибрации, ударам, скачкам давления.
К недостатку можно отнести нелинейную зависимость емкости
от приложенного давления.
Резонансный метод используется в датчиках давления на основе вибрирующего цилиндра, струнных датчиках, кварцевых
датчиках, резонансных датчиках на кремнии. В основе метода
лежат волновые процессы: акустические или электромагнитные.
Это объясняет высокую стабильность датчиков и высокие выходные
характеристики прибора.
Примером может служить кварцевый резонатор (рис. 119). При
прогибе мембраны происходит деформация кристалла кварца, подключенного в электрическую схему, и его поляризация. В результате
изменения давления частота колебаний кристалла меняется. Подобрав параметры резонансного контура, изменяя емкость конденсатора
или индуктивность катушки, можно добиться резонанса.
Преимуществом резонансных датчиков является высокая точность и стабильность характеристик, которая зависит от качества используемого материала
Рис. 119. Кварцевый резонатор
212
К недостаткам можно отнести индивидуальную характеристику
преобразования давления, значительное время отклика, не возможность проводить измерения в агрессивных средах без потери точности показаний прибора.
Индуктивный метод основан на изменении индуктивности. Частным примером может служить датчик, чей чувствительный элемент
состоит из катушки индуктивности и сердечника из ферромагнитного материала (рис. 120).
Рис. 120. Датчик измерения индуктивности
При прогибе мембраны под действием давления перемещается
и сердечник, изменяя тем самым индуктивность катушки. Изменение
индуктивности затем преобразуется в унифицированный выходной
сигнал.
Преимуществом такой системы является достаточно высокая
точность и незначительная температурная зависимость. Однако датчик чувствителен к магнитным воздействиям.
213
ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ
1. Что такое технологический процесс?
2. Что такое объект управления?
3. Что такое система управления?
4. В чем состоит принцип разомкнутого управления?
5. В чем состоит принцип управления по возмущению?
6. В чем состоит принцип замкнутого управления?
7. В чем состоит принцип комбинированного управления?
8. По каким признакам осуществляется классификация САУ?
9. Что представляет собой математическая модель объекта?
10. Как осуществляется оценка модели на адекватность?
11. Каковы основные способы математического описания САУ?
12. Что представляет собой статическая характеристика системы?
13. Что такое переходный процесс?
14. Какие типовые возмущающие воздействия используются для
определения статических и динамических характеристик систем?
15. Что такое переходная функция?
16. Что такое импульсная функция?
17. Что представляют собой частотные характеристики системы
(объекта)?
18. Что такое порядок дифференциального уравнения?
19. Как осуществляется линеаризация дифференциальных уравнений?
20. Как определяется прямое преобразование Лапласа функции f(t)?
21. Как определяется обратное преобразование Лапласа?
22. Что такое передаточная функция?
23. Каковы типовые звенья САР?
24. На какие группы разделяются типовые звенья?
25. Какими уравнениями описываются типовые звенья?
26. Каковы передаточные функции типовых звеньев?
27. Каковы выходные характеристики типовых звеньев?
28. Каковы способы соединения звеньев и их передаточные
функции?
29. По каким признакам классифицируются объекты управления?
214
30. Какие основные свойства объектов управления используются
при проектировании САУ?
31. Как определяются динамические характеристики объектов
управления?
32. Что такое технологический процесс?
33. Что такое объект управления?
34. Что такое система управления?
35. В чем состоит принцип разомкнутого управления?
36. В чем состоит принцип управления по возмущению?
37. В чем состоит принцип замкнутого управления?
38. В чем состоит принцип комбинированного управления?
39. По каким признакам осуществляется классификация САУ?
40. Что представляет собой математическая модель объекта?
41. Как осуществляется оценка модели на адекватность?
42. Каковы основные способы математического описания САУ?
43. Что представляет собой статическая характеристика системы?
44. Что такое переходный процесс?
45. Какие типовые возмущающие воздействия используются для
определения статических и динамических характеристик систем?
46. Что такое переходная функция?
47. Что такое импульсная функция?
48. Что представляют собой частотные характеристики системы
(объекта)?
49. Что такое порядок дифференциального уравнения?
50. Как осуществляется линеаризация дифференциальных уравнений?
51. Как определяется прямое преобразование Лапласа функции f(t)?
52. Как определяется обратное преобразование Лапласа?
53. Что такое передаточная функция?
54. Каковы типовые звенья САР?
55. На какие группы разделяются типовые звенья?
56. Какими уравнениями описываются типовые звенья?
57. Каковы передаточные функции типовых звеньев?
58. Каковы выходные характеристики типовых звеньев?
215
59. Каковы способы соединения звеньев и их передаточные
функции?
60. По каким признакам классифицируются объекты управления?
61. Какие основные свойства объектов управления используются
при проектировании САУ?
62. Как определяются динамические характеристики объектов
управления?
63. Что такое измерительный прибор?
64. Как различаются измерительные приборы?
65. Что представляет собой измерительный преобразователь?
66. Как различаются измерения по способу получения
информации?
67. Что такое погрешность измерений?
68. Как определяется точность измерений?
69. Как подразделяются погрешности по характеру проявления?
70. Как подразделяются погрешности по способу выражения?
71. Как определяется абсолютная вариация показаний прибора?
72. Что такое класс точности?
73. Что такое поверка?
74. Какие принципы положены в основу ГСП?
75. Что такое первичный преобразователь?
76. Какими основными физическими величинами характеризуются химико-технологические процессы?
77. Какие методы и приборы используются для измерения температуры?
78. Какие температурные шкалы используются для количественного определения температуры?
79. Какие методы измерения температуры вам известны?
80. Каким образом подразделяются приборы для измерения температуры?
81. Как определяется давление?
82. Каковы единицы измерения давления?
83. Каким образом подразделяются приборы измерения давления
по принципу действия?
84. Каким образом подразделяются приборы измерения давления
по роду измеряемой величины?
216
Приложение
Меры длины
В системе СИ за единицу длины был принят метр, а в 1983 г. ХVII
Генеральная конференция по мерам и весам приняла новое определение
метра: "Метр – длина пути, проходимого в вакууме светом за 1/299792458
доли секунды".
В ряде стран еще используется не эталонные меры длины:
1 дюйм = 2,54·10-2 м;
1 фут = 0,3048 м;
1 ярд = 0,91440 м;
1 миля сухопутная = 1609,34 м;
1 миля морская (географическая) = 1' земного экватора = 1853,25 м;
1 кабельтов = 1/10 морской мили = 1852 м;
1 морская лига = 3 морские мили = 5560,08 м;
1 старорусская миля = 7 вёрст = 7467,6 м.
Меры массы:
За единицу веса в соответствии с современными положениями СИ
принят килограмм — масса, равная массе международного прототипа килограмма (платиновая цилиндрическая гиря, высота и диаметр которой равны
по 39 мм), хранящегося в международном бюро мер и весов.
Внесистемные наиболее распространенные единицы массы:
1 килограмм = 1000 г = 2,205 фунта;
1 фунт = 16 унций = 4,53592 ·10-1 кг;
1 тройский фунт = 12 тройских унций = 5760 гран = 3,73242 ·10-1 кг;
1 унция = 2,895·10-2 кг;
1 тройская унция = 3,11035·10-2 кг;
1 гран = 6,479891·10-5 кг;
1 карат = 3,086 гран = 2·10-4 кг.
Меры жидких тел:
Литр (фр. litre, от лат. litra - мера объема ёмкости; русское обозначение — л; международное -L или l) - внесистемная метрическая единица
измерения объёма и вместимости, равная 1 кубическому дециметру. Литр
не является единицей Международной системы единиц (СИ), но вместе с
такими единицами, как час или сутки, включён в число тех внесистемных
единиц, которые допускаются к применению без ограничения срока наравне
с единицами СИ с областью применения «все области». Единица объёма в
СИ - кубический метр (м³).
1 литр = 103 мл = 1 дм³ =10-3 м³
217
Внесистемные наиболее распространенные единицы объема жидких
тел:
1 пинта (англ.) = 1,2 пинты США = 568,24 мл
1 кварта (англ.) = 2 пинты (англ.) = 40 жидких унций = 1,1365 л
1 жидкая унция = 0,028 л
1 галлон (англ.) = 4,546 л
1 баррель нефтяной = 42 галлона = 159 л
1 бушель = 8 галлонов = 36,36 л
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
Основной
Кузнецов, А. П. Управление системами и процессами [Текст] :
учеб. пособие / А. П. Кузнецов. М. : МГУ, 2011. – 95 с. Knigafond.ru
Корабко, В. И. Теория управления [Текст] : учебник/ В. И. Корабко. М. : ЮНИТИ-ДАНА, 2012. – 384 с. Knigafond.ru
Подчукаев В. А. Теория автоматического управления (аналитические методы) [Текст] : учебник/ В. А. Подчукаев. М. ФИЗМАТЛИТ,
2011. Knigafond.ru
Дополнительный
Беспалов, А. В. Системы управления химико-технологическими процессами [Текст] : учебник для вузов/ А. В. Беспалов, Н. И.
Харитонов. М. : ИКЦ "АКАДЕМКНИГА", 2007. – 696 с.
Руководство по выполнению курсового проектирования по автоматизации [Текст] : учеб. пособие / В. К. Битюков, А. Н. Гаврилов,
А. Е. Емельянов, Ю. В. Пятаков – Воронеж : Воронеж. гос. технолог.
акад., 2006. – 104 с.
Власов, К. П. Теория автоматического управления [Текст] :
учеб. пособие. – Хабаровск : Изд-во «Гуманитарный центр», 2006. 218 с.
218
Гаврилов, А. Н. Автоматизированные системы управления технологическими процессами [Текст] : учеб. пособие/ А. Н. Гаврилов,
Ю. В. Пятаков; Воронеж. гос. технол. акад. – Воронеж : ВГТА, 2007.
– 240 с.
Гаврилов, А. Н. Информационные системы [Текст]: учебн. пособие / А. Н. Гаврилов. – Воронеж : ВЭПИ, 2006. – 168 с.
Горев, С. М. Автоматизация производственных процессов нефтяной и газовой промышленности [Текст] : курс лекций:
в 2 ч. /
С. М. Горев. – Петропавловск-Камчатский : КамчатГТУ, 2003. Ч. 1.
– 121 с.
Кирюшин, О. В. Управление техническими системами [Текст] :
курс лекций / О. В. Кирюшин. – Уфа : Изд-во УГНТУ, 2003. – 80 с.
Лазарев, В. Л. Робастные системы управления в пищевой промышленности [Текст] : учеб. пособие / В. Л. Лазарев. - СПб. :
СПбГУНиПТ, 2003. - 150 с.
Лазарева, Т. Я. Основы теории автоматического управления
[Текст] : учеб. пособие / Т. Я. Лазарева, Ю. Ф. Мартемьянов. -2-е
изд., перераб. и доп. -Там-бов: Изд-во Тамб. гос. техн. ун-та, 2004. 352 с.
Мирошник, И. В. Теория автоматического управления. Линейные системы [Текст] / И. В. Мирошник. -СПб. : Питер, 2005 – 354 с.
Михеев, В. П. Датчики и детекторы [Текст] : учеб. пособие. / В. П.
Михеев, А. В. Посандеев. – М. : МИФИ, 2007. – 172 с.
Новиков, С. И. Практическая идентификация динамических характеристик объектов управления теплоэнергетического оборудования [Текст] : учеб. пособие / С. И. Новиков. – Новосибирск: Изд-во
НГТУ, 2004. – 64 с.
Пономарев, С. В. Метрология, стандартизация, сертификация
[Текст] : учебник для вузов / С. В. Пономарев, Г. В. Шишкина, Г. В.
Мозгова. – Тамбов : Изд-во ГОУ ВПО ТГТУ, 2010. – 96 с.
219
Учебное издание
ГАВРИЛОВ Александр Николаевич
ПЯТАКОВ Юрий Владиславович
СИСТЕМЫ УПРАВЛЕНИЯ
ХИМИКО-ТЕХНОЛОГИЧЕСКИМИ
ПРОЦЕССАМИ
Ч. 1
В авторской редакции
Подписано в печать 14.06.2014. Формат 60х 84 1/16.
Усл. печ. л. 13,5. Тираж 150 экз. Заказ
. С - 11
ФГБОУ ВПО «Воронежский государственный университет инженерных технологий»
(ФГБОУ ВПО «ВГУИТ»)
Отдел полиграфии ФГБОУ ВПО «ВГУИТ»
Адрес университета и отдела полиграфии:
394036, Воронеж, пр. Революции, 19
220