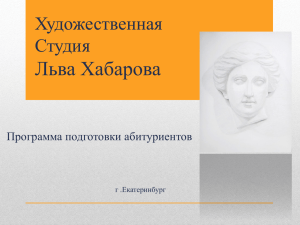
Трех осевой стабилизатор для камеры. Гиростабилизрующая платформа. Гироскоп
реклама

СОДЕРЖАНИЕ Задание по подготовке выпускной квалификационной работы 2 Аннотация выпускной квалификационной работы 3 Annotation final qualifying work 4 Введение Основная часть 7 9 1. Общее описание устройства 9 2. Постановка задачи ВКР 9 3. Механическое устройство 9 4. Исполнительный механизм 10 4.1. Общее устройство 10 4.2. Магниты и полюса 10 4.3. Обмотки и зубья 12 4.4. Принцип работы 14 4.5. Синхронная машина 14 4.6. Постоянное напряжение 19 4.7. Звезда и Треугольник 22 4.8. Схема коммутации фаз 24 4.9. Определение положения ротора бесколлекторного двигателя 25 4.10. Отслеживание положения ротора по датчикам Холла 26 4.11. Определения положения ротора по сигналам обратной ЭДС 27 4.12. Схема со средней точкой 27 4.13. Алгоритм коммутаций 29 5. Датчик 32 5.1. Акселерометр 32 5.2. Одноосевой акселерометр 32 5.3. Двух осевой акселерометр 34 5.4. 5.5. Трех осевой акселерометр Гироскоп 36 37 5.6. Комплементарный фильтр 38 6. Классификация гиростабилизаторов. 40 7. Система управления 41 7.1. Контур стабилизации по оси крена 5 41 7.2. Контур стабилизации по оси тангажа 45 7.3. Контур стабилизации по оси рысканья 50 8. Электронная схема 54 9. Описание шины I2C 55 9.1. Принцип подключения 55 9.2. Принцип работы 56 10. Алгоритм работы основного микроконтроллера 58 11. Алгоритм управления бесколлекторными двигателям 58 Заключение Список литературы 59 60 Приложение А 63 Приложение Б 64 Приложение В 65 Приложение Г 66 Приложение Д 67 Приложение Е 68 6 ВВЕДЕНИЕ На данном этапе развития современного кино основным выразительным средством режиссера считается передвижение камеры в пространстве. Движение камеры в пространстве панорамирование и бывает вертикальное. двух разновидностей: Горизонтальное горизонтальное панорамирование, это горизонтальное движение слева направо или справа налево без поворота камеры вокруг собственных осей. Вертикальное панорамирование - это отвесное перемещение сверху вниз либо снизу вверх, также опять без передвижения осей камеры. Для вертикальной панорамы объективно все без исключения то ведь, то, что и для горизонтальной, только лишь в отвесной плоскости. Панорамирование это один из самых сложных киноприемов, по этой причине подобные сцены, снятые любителями, разительно отличаются от профессиональной деятельности. В советском союзе главным приверженцем панорамирования считается кинорежиссер Андрей Тарковский. На западе же, плавными пролетами славятся Девид Финчер, Братья Коэны, Стенли Кубрик, Ларс фон Триер. Главной трудностью, в съёмке при перемещении, считается приобретение устойчивого изображения, лишённого тряски и колебаний. При съёмке с рук либо с плеча тряска изображения неотвратима и способна сделать его негодным для использования. Для решения данной трудности существуют методы стабилизация изображения. Стабилизация изображения, это технология которую зачастую используют в фото и кино. С помощью нее ликвидируют смазывание и тряску изображения из за ненужных движений камеры. В фотографии стабилизацию используют для съемки без штатива в условиях низкой освещенности когда требуется продолжительная выдержка. В кино стабилизацию используют с целью компенсации тряски изображения при съемке с руки или в перемещении. Системы стабилизации делятся на два вида: активные и пассивные. К первым принадлежат гиростабилизаторы также механические демпферы, регулирующие состояние камеры в пространстве, одним из таких является трех осевой гиростабилизратор «Стэдикам». Пассивные устройства базируются на оптическом и цифровом смещении изображения относительно плоскости матрицы, или на сдвиге 7 самой матрицы вслед за смещающимся изображением. В последующем я буду рассматривать активные системы стабилизации. Я считаю, что мое исследование по этому вопросу будет не только актуально, но и принесет новые решения для данной проблематики. Я собираюсь разработать систему управления трех осевого стабилизатора и описать все тонкости его работы. Особенностью стабилизатора будет беспрепятственное вращение по всем трем осям на 360 градусов и каналом связи между контроллерами бесколлекторных моторов, инклинометром и основным микроконтроллером по шине I2C. 8 ОСНОВНАЯ ЧАСТЬ 1. Общее описание устройства Устройство представляет из себя гиростабилизрующую платформу. Пространственная стабилизация объектов или приборов, и вычисление углов отклонения относительно площадки приборов, основная задача стабилизатора. Механически оно является из трех осевым карданным подвесом, с креплением для камеры в центре (рисунок А1). Имеется ручка за которую оператор держит стабилизатор, и панель управления встроенная в ручку для настройки осей и управления ими. В ручку встроена батарея и основная электроника устройства. На каждой оси присутствует по двигателю, который приводит в движение ось. Под креплением камеры находится электронный датчик угла. 2. Постановка задачи ВКР 1. Требуется описать все тонкости работы трех осевого гиростабилизатора. 2. Разработать систему его систему управления для всех трех осей. 3. Все три оси стабилизатора должны беспрепятственно вращаться на 360 градусов по каждой оси не ограниченное количество раз.. 3. Механическое устройство Стабилизатор является карданным подвесом, с камерой в центре (рисунок Б1). Каждая ось подвеса может вращаться независимо с помощью бесколлекторных двигателей. В каждую ось вращения встроены скользящие контакты (рисунок В1, В2) для предотвращения перекручивания питающих и сигнальных проводов. Так как каждый дополнительный скользящий контакт увеличивает габариты стабилизатора, то было решено использовать скользящие контакты с 4 выводами, 2 вывода на питание «+» и «-», и два вывода на шину данных I2C, один под линию SCL, а другой под линию SDA. Двигатели представляют собой два цилиндра вращающиеся друг относительно друга, с отверстием на оси вращения. В это отверстие вставляется скользящий контакт и крепится к двигателю со стороны статора (рисунок Г1). 9 4. Исполнительный механизм Бесколлекторный двигатель, данная электрическая машина будет использоваться в качестве исполнительного механизма стабилизатора. 4.1. Общее устройство Расположенные на роторе магниты и расположенные на статоре обмотки, это устройство бесколлекторного двигателя постоянного тока. Различают два типа двигателей: Inrunner, у которых магниты ротора находятся внутри статора с обмотками, и Outrunner, у которых магниты расположены снаружи и вращаются вокруг неподвижного статора с обмотками. Рисунок 1 – Расположение магнитов на разных типах двигателей 4.2. Магниты и полюса Четное число полюсов является основой конструкции ротора. При установке магнитов на ротор их полюса чередуют. Наиболее часто можно встретить магниты прямоугольной формы. 10 Рисунок 2 – Формирование одного полюса несколькими магнитами Один полюс могут формировать несколько магнитов, поэтому не всегда количество магнитов равняется количеству полюсов. К примеру на рисунке 3, количество полюсов равняется 4, а количество магнитов 8. Рисунок 3 – Формирование одного полюса несколькими магнитами В таких двигателях как правило используют неодимовые магниты, так как чем сильнее магниты тем выше крутящий момент может развить двигатель. 11 4.3. Обмотки и зубья Из листов магнитопроводящей стали сложенных вместе формируется статор. Для увеличения крутящего момента применяют многожильный медный провод, но чаще всего обмотку делают из одножильного медного провода. Рисунок 4 – Обмотки двигателя Количество зубьев статора должно делиться на 3, то есть должно быть кратно числу фаз. На роторе, количество полюсов может быть как больше зубьев статора так и меньше. Существуют схемы моторов с 9 зуб. / 12 магн. или же 51 зуб / 46 магн. Рисунок 5 – Фазы двигателя 12 Из за того что в трех зубом исполнении статора создается перекос из за не равномерно действующих сил магнитных сил (рисунок 6), так как в каждый момент работает только две фазы, то двигатели с трех зубым статором практически не применяют. Рисунок 6 – Неравномерность нагрузки при трех зубом строении Из за сил воздействующих на ротор, происходит вибрация и износ подшипников. Равномерное распределение большого количества зубьев по всей окружности, это решение данной проблемы. Рисунок 7 – Пример двигателя с множеством зубьев 13 Происходит компенсация магнитных сил воздействующих на ротор. Рисунок 8 – Распределение сил на многозубом двигателе 4.4. Принцип работы Увлекающееся за электромагнитным полем статора магнитное поле ротора, это условия для работы бесколлекторного двигателя постоянного тока. С помощью контроллера происходит коммутация обмоток и создается вращение магнитного поля статора. Рассмотрим управление синхронной машиной переменного тока для того что бы понять как правильно коммутировать обмотки бесколлекторного двигателя. 4.5. Синхронная машина От трехфазной сети переменного тока работает синхронная двигатель. Обмотки смещенные между собой на 120 градусов – вот внутреннее устройство синхронной машины. Если начать вращать двигатель, то на каждой обмотке будет наводится ЭДС, если снять напряжение с обмоток то мы увидим что они будут смещены между собой на 120 градусов (рисунок 9). 14 Форма ЭДС меняется по синусоидальному закону, период синусоиды равен 2π (360), поскольку мы имеем дело с электрическими величинами (ЭДС, напряжение, ток) назовем это электрическими градусами и будем измерять период в них. В каждой обмотке, при подаче на двигатель трехфазного напряжения, возникнет ток. Рисунок 9 – Вид сигнала трехфазного источника переменного тока. Пропорционально току в обмотке на ней формируется вектор магнитного поля. Результирующий вектор магнтного поля можно получить сложив 3 вектора. Из за синусоидального закона изменения тока в обмотка двигателя, у каждой обмотки меняется величина вектора магнитного поля, а результирующий суммарный вектор меняет угол поворота, но величина вектора остается постоянной. На рисунке 10 изображен один электрический период трехфазного двигателя, на данном периоде обозначено 3 произвольных момента, чтобы построить в каждом из этих моментов вектора магнитного поля отложим данный период, 360 электрических градусов, на окружности. Разместим 3 обмотки двигателя сдвинутые на 120 электрических градусов относительно друг друга (рисунок 11). 15 Рисунок 10 – Один электрический период трехфазного двигателя. Рисунок 11 – Момент 1. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа). 16 Направление постоянного тока в обмотке определяет направление вектора. Вектор магнитного поля создаваемый каждой из обмоток построен вдоль этих обмоток. Если напряжение, прикладываемое к обмотке положительно, то вектор направлен в противоположную сторону от обмотки, если отрицательное, то вдоль обмотки. По закону сложения векторов можно получить результирующий вектор магнитного поля. Для третьего и второго моментов времени построение аналогично. Рисунок 12 – Момент 2. Вектора магнитного поля каждой обмотки (слева) и результирующий вектор магнитного поля (справа). Направление результирующего вектора плавно меняется с течением времени (рисунок 5). 17 Рисунок 13 – Вид вращающегося магнитного поля формируемого обмотками на статоре двигателя. В каждый момент времени поле постоянных магнитов ротора увлекается за электрическим вектором статора (рисунок 14). 18 Рисунок 14 – Постоянный магнит (ротор) следует направлению магнитного поля формируемого статором. Таким образом работает синхронная машина переменного тока. Формирование смен направления тока в один период на трех обмотках бесколлекторного двигателя это одно из главных условий его работы от источника постоянного тока. Мы можем отталкивать от рисунка 13, так как из за схожести синхронной машины и бесколлекторного двигателя, так как в генераторном режиме они имеют идентичные параметры. 4.6. Постоянное напряжение Есть возможность подавать напряжение только на две из трех обмоток, так как источник постоянного тока имеет только 2 провода «плюс» и «минус». Имеется только 6 вариантов коммутации обмоток, такой вывод напрашивается глядя на рисунок 13. Изобразим возможные варианты коммутаций и выделим последовательность, при которой вектор будет шаг за шагом проворачиваться пока не дойдет до конца периода и не начнет заново. От первого вектора булем отсчитывать электрический период. 19 Рисунок 15 – Вид шести векторов магнитного поля которые можно создать от источника постоянного тока коммутацией двух из трех обмоток. Мы имеем множество векторов вращающихся во времени, а при коммутации постоянным напряжением, можно получить только 6 векторов, значит переключение на следующий этап должно происходить каждые 60 градусов. Результаты из рисунка 14 сведены в таблицу ниже. 20 Таблица 1 – Порядок включения обмоток Плюс питания Минус питания Обмотка не подключена C A B C B A A B C A C B B C A B A C Вид получившегося управляющего сигнала изображен на рисунке 16. Где -V коммутация на минус источника питания (GND), а +V коммутация на плюс источника питания. Рисунок 16 – Вид управляющих сигналов от источника постоянного тока для бесколлекторного двигателя. Желтый – фаза C, синий – A, красный – B. В реальности же сигнал напряжения на фазах будет похож на сигнал на рисунке 9. Постоянные магниты наводят на не скоммутированную обомотку ЭДС и поэтому образуется трапецивидная форма (рисунок 17). 21 Рисунок 17 – Вид сигнала с обмоток бесколлекторного двигателя в рабочем режиме. 4.7. Звезда и Треугольник Треугольник и звезда, это два вида соединения обмоток бесколлекторного двигателя. Рисунок 18 – Виды обмоток бесколлекторного двигателя Через две обмотки течет ток при включении звездой. Сумма двух обмоток равна результирующему сопротивлению. 𝑅 = 𝑅1 + 𝑅2 Максимально возможный протекающий ток через обмотки будет 22 𝐼= 𝑈 𝑅1 + 𝑅2 Мощность потребления 𝑃 =𝑈∙𝐼 Если сопротивление обмотки 3 Ом, а напряжение 12, тогда ток 𝐼= 12 = 2𝐴 (3 + 3) Мощность потребления 𝑃 = 12 ∙ 2 = 24 Вт Ток течет через все обмотки при включении треугольником. Тогда общее сопротивление обмоток 𝑅рез = (𝑅1 ∙ (𝑅2 + 𝑅3 )) (𝑅1 + 𝑅2 + 𝑅3 ) Протекающий через обмотки ток 𝐼= 𝑈 (𝑅1 ∙ (𝑅2 + 𝑅3)) (𝑅1 + 𝑅2 + 𝑅3 ) При таком же напряжении и сопротивлении обмоток получаем ток 23 𝐼= 12 =6А (3 ∙ (3 + 3)) (3 + 3 + 3) Мощность потребления 𝑃 = 12 ∙ 2 = 72 Вт При соединении треугольником обмотки греются больше, но обороты вырастают в 3 раза. Можно получить двигатель с совсем другими характеристиками переключая двигатель с звезды на треугольник. Звезду целесообразно применять в длительном режиме включения в двигателях с высоким моментом. Треугольник целесообразно применять для более высоких оборотов в кратковременном режиме. Существуют двигатели которые могут на ходу менять свои принципы включения, в зависимости от ситуации. 4.8. Схема коммутации фаз Двигатель имеет три вывода (три фазы) на которые нам придется подавать в разные моменты времени "+" или "-" питания. Это реализуется с помощью электронных ключей, включенных по мостовой схеме (рисунок 19). 24 Рисунок 19 – Электрическая схема коммутации фаз Замыкая Ключ 1 подаем плюс на фазу А, а замыкая Ключ 6 подаем минус на фазу С. Таким образом, ток потечет от плюса батареи через фазы А и С. Для обеспечения обратного направления, открываем Ключ 5 и Ключ 2. В этом случае ток потечет от плюса батареи через фазы С и А в обратном направлении. При работе двигателя одновременно должен быть открыт только один верхний ключ и один нижний ключ. При смене состояния нужно сразу выключить пару ключей, выждать время, необходимое для закрытия ключей, и только после этого включить другую пару ключей. 4.9. Определение положения ротора бесколлекторного двигателя Для работы двигателя необходимо в нужные моменты времени подключать напряжение на нужные обмотки статора. Подавать напряжение на обмотки двигателя нужно в зависимости от положения ротора, так чтобы магнитное поле статора всегда опережало магнитное поле ротора. Для определения положения ротора двигателя и коммутаций обмоток используют контроллер. Отслеживание положения ротора возможно несколькими способами: 1. По датчикам Холла 25 2. По обратной ЭДС Самый распространенный метод это отслеживание положения по датчикам Холла, так как большинство производителей оснащают ими двигатель при выпуске. Отказаться от встроенных в двигатель датчиков Холла позволяет алгоритм коммутирования обмоток с помощью сигналов обратной ЭДС наводимой магнитным полем ротора. 4.10. Отслеживание положения ротора по датчикам Холла Напряжение на обмотки нужно подавать в зависимости от положения двигателя. Рассмотрим управление двигателем, где используются датчики Холла. Всего используют 3 датчика с дискретными выходами. На рисунке 20 приведена схема, согласно которой нужно подавать напряжение на обмотки в зависимости от сигналов с датчиков. Рисунок 20 – Коммутация нужных фаз по сигналам с датчика Холла 26 Таблица 2 – Включения ключей в зависимости от сигналов датчиков Холла Сигнал с датчиков Холла (ABC) Фазы Ключи 101 A-B Ключ 1; Ключ 4 100 A-C Ключ 1; Ключ 6 110 B-C Ключ 3; Ключ 6 010 B-A Ключ 3; Ключ 2 011 C-A Ключ 5; Ключ 2 001 C-B Ключ 5; Ключ 4 4.11. Определения положения ротора по сигналам обратной ЭДС Существуют бесколлекторные двигатели без каких либо датчиков положения или энкодеров. В таких двигателях определение положения ротора выполняется путем измерения ЭДС на не скоммутированной фазе. Зная, что в каждый момент времени к одной из фаз подключен "+" к другой "-" питания, одна из фаз остается свободной. Вращаясь, двигатель наводит ЭДС в не скоммутированной фазе. По мере вращения напряжение на не скоммутированной фазе изменяется. Измеряя напряжение на не скоммутированной фазе, можно определить момент переключения к следующему положению ротора. Обычно определяют момент перехода напряжения на не скоммутированной фазе через нулевую точку (половину питающего напряжения). Т.е. нужно отследить момент, когда напряжение на не скоммутированной фазе сравняется со средней точкой. Разумеется, для работы этого метода двигатель должен вращаться. Этот метод хорошо работает при сравнительно высоких оборотах двигателя. При низких оборотах наводимая ЭДС может оказаться недостаточной для четкого определения положения ротора. Тем не менее, этот метод очень часто применяется. 4.12. Схема со средней точкой Когда ключи открыты, через фазы протекает ток и средняя точка "привязана" к питающему напряжению. В этот момент на не скоммутированной фазе двигателя 27 выполняются измерения. При разомкнутых ключах, измерение напряжения на свободной фазе не даст результата, поскольку нулевая точка как бы висит в воздухе. В большинстве случаев средняя точка недоступна. т.е. нет возможности физически подключиться к ней без разборки двигателя. Обойти эту ситуацию поможет создание виртуальной средней точки. Рисунок 21 – Схема с виртуальной средней точкой Эта схема очень проста и часто используема, но имеет свои недостатки. Из-за широтно имупульсной модуляции напряжение средней точки не постоянно и зашумленно. Для того чтобы микроконтроллер смог измерить напряжение, применяются цепи согласования сигналов – делители напряжения и RC-фильтры. 28 Рисунок 22 – – Схема с виртуальной средней точкой с цепями согласования сигналов Если двигатель питается к примеру от напряжения 24 вольта, то в средней точке напряжение может колебаться в пределах от 0 до 24 Вольт. Обычно используются микроконтроллеры АЦП измеряющими максимум 5 В. Без схем согласования не обойтись. В противном случае напряжение может превысить допустимое и вывести со строя микроконтроллер. Для этого в цепь ставят делитель напряжения. Присутствие делителя напряжения ведет к снижению чувствительности на малых оборотах двигателя, а наличие фильтров вносит задержку. Задержка является причиной погрешностей в определении положения ротора и может стать критичной для управления двигателями на высоких скоростях. 4.13. Алгоритм коммутаций На не скоммутированной фазе нам нужно будет измерять напряжение. Напряжение можно измерять с помощью АЦП и сравнивать со средней точкой. АЦП имеют время преобразования, что вносит погрешность в вычисления. Для корректной работы не обязательно знать значение напряжения поэтому логичнее 29 использовать компараторы. Важно определить сам момент перехода напряжения на не скоммутированной фазе через среднюю точку. Компаратор срабатывает именно в момент перехода напряжения через среднюю точку и может генерировать прерывание для микроконтроллера. Рассмотрим следующую временную диаграмму (рисунок 23). Рисунок 23 – Коммутация фаз в зависимости от обратной ЭДС На первом этапе на фазу B подается плюс, на фазу A минус. В это же время напряжение на не скоммутированной фазе C начинает расти и в середине периода 1 30 пересекает нулевую точку –половину питающего напряжения между фазами B и A. Из диаграммы следует, что переключение ключей нужно выполнить, выждав паузу, после пересечения нулевой точки 0. После переключения состояния ключей на этапе два, измерения выполняются на не скоммутированной фазе B. Необходимо принять во внимание, что напряжение на не скоммутированной фазе может расти или падать. Это должно учитывается в работе компараторов. Поэтому микроконтроллер должен помнить на каком шаге от 1 до 6 находится, и переходить к следующему состоянию, исходя из расчетов времени, вычисленных между переходами через 0. Таблица 3 – Коммутация фаз в зависимости от обратной ЭДС Этап + - Открытые ключи Изменения напряжения на фазе 1 B A Ключ 3, Ключ 2 C Растет 2 C A Ключ 5, Ключ 2 B Падает 3 C B Ключ 5, Ключ 4 A Растет 4 A B Ключ 1, Ключ 4 C Падает 5 A C Ключ 1, Ключ 6 B Растет 6 B C Ключ 3, Ключ 6 A Падает Вывод: исходя из предложенных выше методов, было решено что для стабилизации положения видеокамеры, нужно использовать алгоритм коммутаций на основе датчиков Холла, так как скорости вращения осей стабилизаторы очень малы, и генерируемая ЭДС на не скоммутированных фазах мотора будет очень мала, а иногда и вовсе отсутствовать. 31 5. Датчик В качестве датчика отклонения от заданного положения будет MEMS – гироскоп и MEMS – акселерометр. Акселерометр – это прибор для измерения ускорения. Гироскоп – это прибор для измерения изменения углов ориентации тела. Далее мы рассмотрим подробно их работу по отдельности и совместно. 5.1. Акселерометр MEMS-акселерометр, это прибор, который измеряет проекцию ускорения на его чувствительную ось. Механически состоит из подвешенного грузика который в зависимости от ускорения своим весом перемещает обкладки переменного конденсатора, тем самым изменяя измеряемое напряжение. Затем измеренное напряжение оцифровывают, математически обрабатывают и вычисляют проекцию ускорения на нужную ось. По величине измеренной проекции определяется угол наклона. 5.2. Одноосевой акселерометр Для начала рассмотрим простой случай, в котором ось X объекта всегда находится в плоскости действия силы гравитации. Тогда формула для вычисления проекции силы гравитации на ось Х: 𝐴𝑥 = 𝑔 ∙ sin(𝛼) где α - угол между осью акселерометра и горизонтом. За горизонт будем принимать плоскость, ортогональную силе гравитации (рисунок 24). Из-за того что выходное значение акселерометра пропорционально синусу угла наклона в поле гравитации, для определения угла наклона получим формулу: 𝑎 = arcsin( 32 𝐴𝑥 ) 𝑔 Рисунок 24 – Одноосевой случай Изучим зависимость проекции ускорения от угла наклона. Чувствительность к ускорению пропорционально углу наклона. В случае с одной оси, если угол наклона близок к значению 90º, большое изменение угла приводит к маленькому изменению измеряемого ускорения. Таким образом, чувствительность измерения будет стремиться к нулю по приближению к 90º. Значимой чертой акселерометра считается размер его пороговой восприимчивости. Данная оценка устанавливает наименьшую разницу между 2-мя углами, какую устройство способен определить. Предел восприимчивости акселерометра есть постоянная величина и принимает наилучшее значение при угле наклона 0º и наихудшее при 90º. Акселерометр должен определить величину, на которую меняется проекция силы гравитации при изменении наклона на угол равный порогу чувствительности акселерометра, и при выборе акселерометра нужно учитывать его минимально разрешающую способность. Разность двух показаний акселерометра при смене угла наклона представляется формулой: ∆𝑥 = 𝑔 ∙ (sin(𝛼 + ∆𝛼 ) − sin(𝛼 )) где α - текущий угол; 33 ∆𝛼 - шаг приращения угла. Выстроим зависимость разницы от угла наклона и величины приращения (рисунок 25). Построенные кривые имеют все шансы быть в дальнейшем применены с целью установления наименьшего требуемого разрешения акселерометра, необходимого для того для того чтобы получить нужный предел восприимчивости. По графику видно, например, для этого для того чтобы приобрести предел восприимчивости одинаковым 0.5º в спектре меримых углов ±55º, следует подобрать акселерометр со позволяющей возможностью равно как как минимум 5мg/LSB. Достижение высокой разрешающей способности в широком спектре замеров, в одноосевом случае, возможно только с использованием акселерометра обладающего значительной разрешающей возможностью. Помимо этого, подобная модель никак не способна функционировать в полном диапазоне углов 0º - 360º так как значения синуса совпадают для углов N и 180 – N. Рисунок 25 – Точность измерения 5.3. Двух осевой акселерометр Внедрение оси Y, перпендикулярной X, сможет спасти систему от недочетов описанных выше(изображение 26). 34 Рисунок 26 – Двухосевой случай Значение ускорения измеренное по оси Y, это косинус измеряемого угла, а значение измеренное по оси X, это синус измеряемого угла. При уменьшении восприимчивости одной оси, восприимчивость другой будет увеличиваться, такой вывод можно сделать из свойств синуса и косинуса. По следующей формуле возможно осуществить вычисление угла наклона. tan(𝛼) = 𝐴𝑥 𝐴𝑦 𝐴𝑥 𝑎 = arctan( ) 𝐴𝑦 Определение порога чувствительности для двух осей, в отличии от одноосевого случая, является сложной задачей. Но зная свойства синуса и косинуса можно считать что общая восприимчивость неизменная величина. Такое решение значительно упрощает подбор акселерометра. Вычисление порога восприимчивости, произведенный для 1-го угла, станет объективен для всего промежутка меримых углов. Квадратный корень из суммы квадратов проекций силы 35 гравитации на восприимчивые оси пропорционален восприимчивости акселерометра. Если влияние гравитации действует только лишь в плоскости XY, значение ускорения, которое определит акселерометр, будет строго равно 1g. Наклон в плоскости XZ или YZ уменьшит измеряемое ускорение, что в свою очередь уменьшит восприимчивость акселерометра. Однако даже невзирая на это, все еще возможно приобрести верные результаты, относящиеся к углу наклона в плоскости XY. Данные размышления объективны только лишь для не больших углов наклона в плоскости XZ и YZ. С увеличением угла наклона воздействие силы гравитации в оси X также Y станет сокращаться, в результате нереально станет вообще рассчитать угол наклона. Кроме того вспомогательная ось предоставляет нам возможность определять углы во диапазоне 0 – 360 градусов. Это достигается с помощью метода смены знака в зависимости от принадлежности угла к этому либо другому квадранту (рисунок 27). Рисунок 27 – Квадранты принадлежности Принадлежность угла к тому или иному квадранту, может быть определена в результате анализа значений, полученных для каждой из чувствительных осей. 5.4. Трех осевой акселерометр Определение всех углов наклона возможно если внедрить третью чувстивительную ось. В первоначальной позиции состояние устройства такое, при 36 котором оси x и y пребывают в плоскости горизонта, а ось Z ортогональна осям X и Y (рисунок 28). Рисунок 28 – Трехосевой случай Значения углов могут быть вычислены по следующим формулам: 𝐴𝑥 𝛼 = arctan( ) 2 2 𝐴 + √𝐴 √ 𝑦 𝑧 𝐴𝑦 𝛽 = arctan( ) √𝐴2𝑥 + √𝐴2𝑧 𝛾 = arctan( 𝐴𝑧 √𝐴2𝑥 + √𝐴2𝑦 ) Как и в 2-х осевом варианте, порог чувствительности постоянен и это позволяет точно измерить значения углов для всех возможных положений акселерометра. 5.5. Гироскоп Еще одним способом измерения углов наклона является MEMS-гироскоп. Гироскоп состоит из трёх независимых одноосных вибрационных датчиков угловой скорости (MEMS гироскопов), которые реагируют на вращение вокруг X-, Y-, Z37 осей. Две подвешенные массы совершают колебания по противоположным осям. С появлением угловой скорости эффект Кориолиса вызывает изменение направления вибрации, которое фиксируется емкостным датчиком. Измеряемая дифференциальная емкостная составляющая пропорциональна углу перемещения. Получившийся сигнал усиливается, демодулируется и фильтруется, давая в итоге напряжение, пропорциональное угловой скорости вращения. В случае использования гироскопа, угол наклона легко вычисляется с помощью дискретного интегрирования скорости его вращения. Используем следующую формулу: 𝛼 (𝑡) = 𝛼 (𝑡 − 1) + 𝜔𝑥 ∙ 𝑑𝑡 где 𝛼 (𝑡) – искомый угол наклона, учитывающий показания акселерометра; 𝛼 (𝑡 − 1) – угол тела в предыдущий момент времени; 𝜔𝑥 – угловая скорость вращения тела вокруг оси X; 𝑑𝑡 – время, которое прошло с момента предыдущего вычисления угла α. К сожалению у MEMS – гироскопа есть один коварный недостаток, который называется дрейфом нуля. Проявление этого недостатка заключается в том, что при остановке вращения гироскопа, он все еще будет показывать значение отличное от нуля. Вторым недостатком такого решения, является применение процедуры дискретного интегрирования, которая по своей природе дает неточный результат. Третья проблема тесно связана с дискретным интегрированием. Она выражается в постепенном накоплении ошибки вычисления угла из-за ограниченной точности АЦП и переменных микроконтроллера. 5.6. Комплементарный фильтр Углы наклона объекта относительно земли мы можем рассчитать с помощью двух приборов. Но из за дрейфа нуля и ошибок интегрирования в случае гироскопа точность таких расчетов снижается. Большая чувствительность к внешним 38 воздействия, это проблемы акселерометра. Объединить показания этих двух устройств будет отличным выходом из ситуации. Изменив не много формулу для показаний интегрирования гироскопа, мы получим комплементарный фильтр, который решит нашу проблему 𝛼 (𝑡) = (1 − 𝐾 ) ∙ (𝑎 (𝑡 − 1) + 𝜔𝑥 ∙ 𝑑𝑡) + 𝐾 ∗ 𝜑𝐴𝑥 где 𝛼 (𝑡) – искомый угол наклона, учитывающий показания акселерометра; 𝛼 (𝑡 − 1) – угол тела в предыдущий момент времени; 𝜔𝑥 – угловая скорость вращения тела вокруг оси X; 𝑑𝑡 – время, которое прошло с момента предыдущего вычисления угла α; 𝜑𝐴𝑥 – значение угла наклона, полученное при помощи акселерометра; 𝐾 – коэффициент комплементарного фильтра. Из формулы видно, что акселерометра и гироскопа интегрированная сумма мгновенного значения представляет собой итоговую величину угла. Нивелирование дрейф нуля гироскопа с помощью показаний акселерометра и ошибки интегрирования, является главной задачей комплементарного фильтра. С помощью показаний акселерометра интеграл угла корректируется каждом шаге. Коэффициент фильтра K задает силу этой коррекции. От величины дрейфа нуля гироскопа, скорости накопления ошибок и условий работы стабилизатора, зависит выбора коэффициента К. На результат работы фильтра может повлиять вибрация стабилизатора при слишком большом значении К. Невозможным окажется ликвидация дрейфа нуля при слишком малом значении К. Исходя из выше сказанного можно сделать вывод что, для каждого датчика вручную подбирается коэффициент комплементарного фильтра. 39 Рисунок 29 – Пример работы комплементарного фильтра Показания гироскопа, это синий график. Показания акселерометра, это красный график. Угол вычисленный при помощи комплементарного фильтра, зеленый график. Вывод: С помощью MEMS – акселерометра и MEMS – гироскопа, а также объединения и фильтрации их показаний с помощью комплементарного фильтра можно добиться очень качественного определения угла наклона стабилизатора. 6. Классификация гиростабилизаторов. По принципу действия: - Индикаторные; - Индикаторно – силовые; - Силовые. Индикаторные гиростабилизаторы. Гироскопический момент почти никак не принимет участие в прямой компенсации возмущающих факторов и их сдерживание обусловливается в основном приводом стабилизации. Индикаторно - силовые гиростабилизаторы. Силовая значимость гироскопов снижена. Присутствие у гироскопа значительного кинетического момента не считается нужным. 40 Силовые гиростабилизаторы. Возмущающие моменты уравновешиваются гироскопическим моментом гироблока в первоначальный момент времени и в дальнейшем заменяющим его моментом, формируемым приводом разгрузки. Стабильные или долго меняющиеся моменты уравновешиваются в основном моментом привода разгрузки, а резкие возмущения, уравновешиваются благодоря приводам разгрузки, так и гироскопическим моментом, а около высоких частот изменения момента компенсируется еще и инерциальным моментом самой платформы. Для силовых гиростабилизаторов необходимы гироскопы со значительным кинетическим моментом. В данном разделе будет рассматриваться система управления трех осевым индикаторным гиростабилизатором с интегрирующим гироскопом. 7. Система управления 7.1. Контур стабилизации по оси крена Дифференциальное уравнение, описывающее движение согласно оси наклона, имеет вид: 𝑑2 𝑑 ∑ 𝐽𝛾 ∙ 2 𝛾 + 𝐷𝛾 ∙ 𝛾 + 𝑘𝑝𝛾 ∙ 𝛾 = 𝑀𝛾 𝑑𝑡 𝑑𝑡 в операторной форме записи: ∑ 𝐽𝛾 ∙ 𝛾(𝑠) ∙ 𝑠 2 + 𝐷𝛾 ∙ 𝛾(𝑠) ∙ 𝑠 + 𝑘𝑝𝛾 ∙ 𝛾(𝑠) = 𝑀𝛾 Структурная схема канала стабилизации имеет вид: Рисунок 30 – Контур стабилизации по оси крена 41 стабилизатора График переходного процесса, соответствующего нескорректированной системе, приведен ниже (рисунок 31) Рисунок 31 – График переходного процесса контура стабилизации по оси крена Передаточная функция незамкнутой нескорректированной системы имеет вид: 𝑊 (𝑠) = где 𝑘𝑝𝛾 ∗ 𝐾𝐴̃ (𝑇𝛾 ∙ 𝑠 + 1) ∙ (𝑇𝐴̃ ∙ 𝑠 + 1)(𝑇𝑠 + 1) 𝑇𝐴̃ − постоянная времени гироскопа; 𝑇 − постоянная времени интегратора; 𝑇𝛾 = 𝐽𝛾 𝐷𝛾 − постоянная времени рамы по оси крена. Логарифмические амплитудно - фазочастотные характеристики разомкнутой нескорректированной системы имеют вид (рисунок 32) 42 Рисунок 32 – ЛАХ и ФЧХ контура стабилизации по оси крена Из приведенного графика очевидно, то что резерв согласно фазе минимален. Из этого вытекает, то что система располагается на рубеже стабильности. С целью предоставления стабильности включим в контур обратной связи исправляющее устройство вида 𝑊𝑝 (𝑠) = 𝑇1 ∙ 𝑠 + 1 𝑇2 ∙ 𝑠 + 1 где параметры корректирующего устройства: 1 𝑐 10 1 𝑇2 = 𝑐 100 43 𝑇1 = Структурная схема скорректированной системы имеет вид Рисунок 33 – Скорректированный контур стабилизации по оси крена Логарифмические амплитудно - фазочастотные характеристики скорректированной разомкнутой системы примут вид (рисунок 34) Рисунок 34 – ЛАХ и ФЧХ скорректированного контура стабилизации оси крена Далее приведен график переходного скорректированной системе (рисунок 35) 44 процесса, соответствующий Рисунок 35 – Скорректированный переходный процесс контура стабилизации оси крена Из этого графика можно заключить, то что корректировка значимым способом повысила стабильность системы и качество переходного процесса. 7.2. Контур стабилизации по оси тангажа Дифференциальное уравнение, описывающее движение стабилизатора по оси тангажа платформы, имеет вид: 𝑑2 𝑑 ∑ 𝐽𝜗 ∙ 2 𝜗 + 𝐷𝜗 ∙ 𝜗 + 𝑘𝑝𝜗 ∙ 𝜗 = 𝑀𝜗 𝑑𝑡 𝑑𝑡 в операторной форме записи: ∑ 𝐽𝜗 ∙ 𝜗 (𝑠) ∙ 𝑠 2 + 𝐷𝜗 ∙ 𝜗 (𝑠) ∙ 𝑠 + 𝑘𝑝𝜗 ∙ 𝜗 (𝑠) = 𝑀𝜗 Структурная схема канала стабилизации будет иметь такой же вид, как по оси крена (рисунок 36) 45 Рисунок 36 – Контур стабилизации по оси тангажа Вид переходного процесса, соответствующего нескорректированной системе по оси курса, представлен ниже (рисунок 37) Рисунок 37 – График переходного процесса контура стабилизации по оси тангажа На графике выше хорошо очевидно, то что качество переходного процесса нескорректированной системы весьма невысокое. Передаточная функция разомкнутой нескорректированной системы имеет вид: 𝑊 (𝑠) = 𝑘𝜗 ∗ 𝐾𝐴̃ (𝑇𝜗 ∙ 𝑠 + 1) ∙ (𝑇𝐴̃ ∙ 𝑠 + 1)(𝑇𝑠 + 1) 46 где 𝑇𝜗 = 𝐽𝜗 𝐷𝜗 − постоянная времени рамы по оси тангажа Логарифмические амплитудно-фазочастотные характеристики разомкнутой не скорректикованной системы имеют вид (рисунок 38) Рисунок 38 – ЛАХ и ФЧХ контура стабилизации по оси тангажа Из приведенного графика очевидно, то что резерв согласно фазе минимален. Из этого вытекает, то что система располагается на рубеже стабильности. С Целью предоставления стабильности включим в контур обратной связи исправляющее устройство вида 47 𝑊𝑝 (𝑠) = 𝑇1 ∙ 𝑠 + 1 𝑇2 ∙ 𝑠 + 1 где параметры корректирующего устройства: 1 𝑐 10 1 𝑇2 = 𝑐 100 𝑇1 = Структурная схема скорректированной системы имеет вид (рисунок 39) Рисунок 39 – Скорректированный контур стабилизации по оси тангажа Логарифмические амплитудно-фазочастотные характеристики разомкнутой скорректированной системы примут вид (рисунок 40) 48 Рисунок 40 – ЛАХ и ФЧХ скорректированного контура стабилизации оси тангажа График переходного процесса, соответствующего скорректированной системе, представлен ниже (рисунок 41) 49 Рисунок 41 – Скорректированный переходный процесс контура стабилизации оси тангажа Из приведенного графика и приведенных частотных характеристик видно, то что корректировка значительно повысила стабильность системы, а также свойство переходного процесса. 7.3. Контур стабилизации по оси рысканья Дифференциальное уравнение, описывающее движение стабилизатора по оси рысканья платформы, имеет вид: 𝑑2 𝑑 ∑ 𝐽𝜓 ∙ 2 𝜓 + 𝐷𝜓 ∙ 𝜓 + 𝑘𝑝𝜓 ∙ 𝜓 = 𝑀𝜓 𝑑𝑡 𝑑𝑡 в операторной форме записи: ∑ 𝐽𝜓 ∙ 𝜓(𝑠) ∙ 𝑠 2 + 𝐷𝜓 ∙ 𝜓(𝑠) ∙ 𝑠 + 𝑘𝑝𝜓 ∙ 𝜓(𝑠) = 𝑀𝜓 50 Структурная схема канала стабилизации будет иметь такой же вид, как по оси крена (рисунок 42) Рисунок 42 – Контур стабилизации по оси рысканья Вид переходного процесса, соответствующего нескорректированной системе по оси курса, представлен ниже (рисунок 43) Рисунок 43 – График переходного процесса контура стабилизации по оси рысканья На графике выше хорошо очевидно, то что качество переходного процесса нескорректированной системы весьма невысокое. Передаточная функция разомкнутой нескорректированной системы имеет вид: 𝑊 (𝑠) = где 𝑇𝜓 = 𝐽𝜓 𝐷𝜓 𝑘𝑝𝜓 ∗ 𝐾𝐴̃ (𝑇𝜓 ∙ 𝑠 + 1) ∙ (𝑇𝐴̃ ∙ 𝑠 + 1)(𝑇𝑠 + 1) − постоянная времени рамы по оси рысканья 51 Логарифмические амплитудно – фазочастотные характеристики разомкнутой нескорректированной системы имеют вид (рисунок 44) Рисунок 44 – ЛАХ и ФЧХ контура стабилизации по оси рысканья Из приведенного графика очевидно, то что резерв согласно фазе минимален. Из этого вытекает, то что система располагается на рубеже стабильности. С целью предоставления стабильности включим в контур обратной связи исправляющее устройство вида 𝑊𝑝 (𝑠) = 𝑇1 ∙ 𝑠 + 1 𝑇2 ∙ 𝑠 + 1 где параметры корректирующего устройства 52 1 𝑐 10 1 𝑇2 = 𝑐 100 𝑇1 = Структурная схема скорректированной системы имеет вид (рисунок 45) Рисунок 45 – Скорректированный контур стабилизации по оси рысканья Логарифмические амплитудно – фазочастотные характеристики разомкнутой скорректированной системы примут вид (рисунок 46) Рисунок 46 – ЛАХ и ФЧХ скорректированного контура стабилизации оси рысканья График переходного процесса, соответствующего скорректированной системе, представлен ниже (рисунок 47) 53 Рисунок 47 – Скорректированный переходный процесс контура стабилизации оси рысканья Из приведенного графика и приведенных частотных характеристик видно, то что корректировка значительно повысила стабильность системы, а также свойство переходного процесса. Вывод: были разработаны и протестированы на устойчивость три системы стабилизации для трех осей. Качество переходного процесса допустимо для использования в стабилизаторе. 8. Электронная схема Электронная схема стабилизатора представляет собой 5 микроконтроллеров и датчик измерения углов связанных между собой шиной I2C (рисунок 48). Один из 5 микроконтроллеров является главным, именно он считывает показания с датчика, рассчитывает управляющий сигнал и подает команды на микроконтроллеры управления бесколлекторными двигателями. Весь обмен данными происходит по шине I2C. Также присутствует линия питания, от нее запитываются двигатели, микроконтроллеры и датчик. Между осями присутствуют вращающиеся контакты, которые предотвращают перекручивание проводов и позволяют вращаться каждой оси на 360 градусов. 54 1 – основной микроконтроллер; 2 – вращающийся контакт; 3 – Шина I2C; 4 – MEMS - Гироскоп; 5 – Питающая линия; 6 – микроконтроллер управляющий бесколлекторным двигателем. Рисунок 48 – Электронная схема стабилизатора 9. Описание шины I2C I2C — последовательная не симметричная шина для связи между устройствами. Использует две двунаправленные линии связи (SDA и SCL), применяется для соединения низкоскоростных периферийных компонентов с процессорами и микроконтроллерами. 9.1. Принцип подключения Шина I2C синхронная, состоит из двух линий: данных (SDA) и тактов (SCL). Есть ведущий (master) и ведомые (slave). Инициатором обмена всегда выступает ведущий, обмен между двумя ведомыми невозможен. двухпроводной шине может быть до 127 устройств. 55 Всего на одной Такты на линии SCL генерирует master. Линией SDA могут управлять как мастер так и ведомый в зависимости от направления передачи. Единицей обмена информации является пакет, обрамленный уникальными условиями на шине, именуемыми стартовым и стоповым условиями. Мастер в начале каждого пакета передает один байт, где указывает адрес ведомого и направление передачи последующих данных. Данные передаются 8-битными словами. После каждого слова передается один бит подтверждения приема приемной стороной. Рисунок 49 – Принцип подключения по шине I2C 9.2. Принцип работы В шине используются две двунаправленные линии, подтянутые к напряжению питания и управляемые через открытый коллектор или открытый сток — последовательная линия данных (SDA, англ. Serial DAta) и последовательная линия тактирования (SCL, англ. Serial CLock). Стандартные напряжения +5 В или +3,3 В. Адреса состоят из 7 бит, это означает что для подключения доступно 128 свободных адресов, 16 из которых зарезервированны. 56 Рисунок 50 – Процесс передачи посылки. Алгоритм обмена начинается с того, что ведущий формирует состояние START: при HIGH уровне на линии SCL он генерирует переход сигнала линии SDA из HIGH состояния в LOW. Этот переход воспринимается всеми устройствами, подключенными к шине, как признак начала процедуры обмена. Генерация синхросигнала — это всегда обязанность ведущего; каждый ведущий генерирует свой собственный сигнал синхронизации при пересылке данных по шине. После формирования состояния START ведущий опускает состояние линии SCL в LOW состояние и выставляет на линию SDA старший бит первого байта сообщения. Количество байт в сообщении не ограничено. Спецификация шины I2C разрешает изменения на линии SDA только при LOW уровне сигнала на линии SCL. Данные должны оставаться стабильными только во время HIGH состояния синхроимпульса. Для подтверждения приёма байта от ведущего-передатчика ведомым-приёмником в спецификации протокола обмена по шине I2C вводится специальный бит подтверждения, выставляемый на шину SDA после приёма 8 бит данных. Алгоритм обмена завершается тем, что ведущий формирует состояние STOP — переход состояния линии SDA из LOW состояния в HIGH при HIGH состоянии линии SCL. Состояния START и STOP всегда вырабатываются ведущим. Считается, что шина занята после фиксации состояния START. Шина освободившейся через некоторое время после фиксации состояния STOP. 57 считается 10. Алгоритм работы основного микроконтроллера Основной микроконтроллер управляющий всем стабилизатором работает по алгоритму приведенному на рисунке Д1. 11. Алгоритм управления бесколлекторными двигателям Микроконтроллер управляющий бесколлекторными двигателями работает по алгоритму приведенному на рисунке E1. 58 ЗАКЛЮЧЕНИЕ Проведенные в данной работе исследования и расчеты по теме разработка следящей системы контроля положения камеры видеонаблюдения, позволили получить следующие результаты 1. Были описаны все тонкости работы трех осевого гиростабилизатора. 2. Была разработана система управления по всем трем осям. 3. Механическое устройство гиростабилизатора позволяет вращаться ему по каждой оси на 360 градусов не ограниченное количество раз. 59 СПИСОК ЛИТЕРАТУРЫ 1. Российский экономический университет имени Г.В. Плеханова. Лабораторная работа 4. Изучение вращательного движения твердого тела. URL: https://www.rea.ru/ru/org/cathedries/himfizkaf/Documents/Лабораторная%20работа%20 4.%20Изучение%20вращательного%20движения%20твердого%20тела.pdf – Текст электронный. 2. Определение BITAKS. угла наклона акселерометром. URL: http://bitaks.com/resources/inclinometer/content.html – Текст электронный. 3. MEMS-акселерометры и гироскопы — разбираемся в спецификации / Хабр. URL: https://habr.com/ru/post/431566/#:~:text=MEMS- гироскоп&text=%2C%20которое%20фиксируется%20емкостным%20датчиком.,напр яжение%2C%20пропорциональное%20угловой%20скорости%20вращения – Текст электронный. 4. Комплементарный фильтр | Класс робототехники. URL: https://robotclass.ru/articles/complementary-filter/ – Текст электронный. 5. Википедия. Инклинометр. URL: https://ru.wikipedia.org/wiki/Инклинометр – Текст электронный. 6. Управление бесколлекторным двигателем по сигналам обратной ЭДС – понимание процесса/Хабр. URL: https://habr.com/ru/post/390469/ – Текст электронный. 7. Avislab. Бесколлекторные двигатели постоянного тока. Устройство бесколлекторного двигателя. - Avislab - сайт для палких паяльників. URL: https://blog.avislab.com/brushless02/ – Текст электронный. 8. brushless Avislab. Бесколлекторные двигатели с датчиками Холла (Sensored motors) - Avislab - сайт для палких паяльників. URL: https://blog.avislab.com/brushless03/ – Текст электронный. 9. Avislab. Бесколлекторные двигатели постоянного тока. Управление бездатчиковыми бесколлекторными двигателями (Sensorless BLDC) - Avislab - сайт для палких паяльників. URL: https://blog.avislab.com/brushless04/ электронный. 60 – Текст 10. Avtika. Схема обмоток бесколлекторного двигателя. URL: https://avtika.ru/shema-obmotok-beskollektornogo-dvigatelya/ – Текст электронный. 11. Википедия. Steadicam. URL: https://ru.wikipedia.org/wiki/Steadicam – Текст электронный. 12. В.Д. Арсеньев, Е.Р. Рахтеенко. Расчет максимальных значений инерционных моментов в гироскопических стабилизаторах для маневренных объектов. Вестник МГТУ им. Н.Э. Баумана: электронное издание. 2013 – 11 с. – Текст электронный. 13. Лысов А.Н., Лысова А.А. Теория гироскопических стабилизаторов. Челябинск. Издательский центр ЮУрГУ. 2009.– 117 с. – Текст электронный. 14. Исаев А.М. Математические модели, численный метод и комплекс программ для повышения дальности полета мультироторного беспилотного летательного аппарата малого класса. Ставраполь. СЕВЕРО – КАВКАЗСКИЙ ФЕДЕРАЛЬНЫЙ УНИВЕРСИТЕТ. 2020 – 196 с. – Текст электронный. 15. Д.С Пельпор. Гироскопические системы. Теория гироскопов и гироскопических стабилизаторов: Учеб для вузов по спец. «Гироскоп. приборы и устройства». – 2 – е изд., перераб. и доп. – М.: Высш. шк., 1986. – 432 с. – Текст непосредственный. 16. Коновалов С.Ф., Никитин Е.А., Селиванова Л.М. Гироскопические системы. Проектирование гироскопических систем. Ч. III. Акселерометры, датчики угловой скорости, интегрирующие гироскопы и гироинтерграторы: Учеб. пособие / Под ред. Д. С. Пельпора. – Высш. школа, 1980 – 128 с. – Текст непосредственный. 17. Christopher J. Fisher. Using an Accelerometer for Inclination Sensing. Norwood. U.S.A. 2010. – 8 c. – Текст электронный. 18. Yan Anisimov. Feedback control based on neural networks. 2015. – USA. 2017 – 5 c. – Текст электронный. 19. Савельев И. В. Курс общей физики. Т. 1 - М. : Наука, 1987. – 517 c. – Текст электронный. 61 20. Гудвин Г.К. Проектирование систем управления/Г. К. Гудвин, С.Ф. Гребе, М. Э. Сальдаго. – М.: БИНОМ. Лаборатория знаний, 2004. – 911 с. – Текст электронный. 62 ПРИЛОЖЕНИЕ А 1 – бесколлекторный двигатель; 2 – крепление для камеры; 3 – панель управления стабилизатором; 4 – ручка стабилизатора; Рисунок 1 – Стедикам 63 ПРИЛОЖЕНИЕ Б 1 – бесколекторнный двигатель; 2 – крепление для камеры; 3 – камера; 4 – кронштейн оси; 5 – ручка стабилизатора; Трех осевой стабилизатор для камеры 64 ПРИЛОЖЕНИЕ В Рисунок 1 – Скользящий контакт Рисунок 2 – Внутреннее устройство скользящего контакта 65 ПРИЛОЖЕНИЕ Г 1 – кронштейн первой оси; 2 – ротор бесколлекторного двигателя; 3 – статор бесколлекторного двигателя; 4 – кронштейн второй оси; 5 – скользящий контакт; Рисунок 1 – Скользящий контакт в оси стабилизатора 66 ПРИЛОЖЕНИЕ Д Рисунок 1 – Алгоритм работы основного микроконтроллера 67 ПРИЛОЖЕНИЕ Е Рисунок 1 – Алгоритм работы микроконтроллера управляющего бесколлекторным двигателем. 68