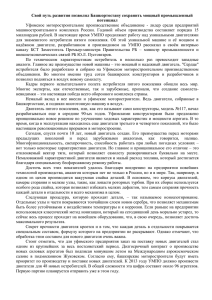
Министерство образования Республики Беларусь Учреждения образования “Гомельский государственный университет имени Франциска Скорины” Факультет физики и информационных технологий Кафедра радиофизики и электроники КУРСОВОЙ ПРОЕКТ На тему: «Расчет и построение характеристик для двигателя постоянного тока с независимым возбуждением» ПО ДИСЦИПЛИНЕ «ИСПОЛНИТЕЛЬНЫЕ УСТРОЙСТВА СИСТЕМ БЕЗОПАСНОСТИ» Вариант 16 Исполнитель студент группы ЭСБ–25 _______________ М.Д.Сойка Научный руководитель ______________ А.В. Максименко Гомель, 2018 Содержание Введение……………………………………………………………… Глава 1. Теоретические сведения …………………………………. Глава 2.Технические параметры двигателя………………………. Глава 3. Расчет коэффициентов уравнения «вход–выход»……… Глава 4. Построение графиков механических характеристик….. Глава 5.Построение графиков регулировочных характеристик… Заключение…………………………………………………………. Литература…………………………………..……………………….. 2 3 4 7 8 9 12 13 14 Введение Для обеспечения безопасности объектов используют различные технические средства. В исполнительных устройствах систем безопасности используют технические средства с электромеханическим, механическим гидропневматическим и др. принципом действия. Наибольшее распространение в качестве исполнительных устройств или их составляющих получили различные электромеханические устройства (электроприводы). Электродвигатель является основным элементом электрического привода для исполнительных механизмов. Соответствие его конструктивных и технических данных условиям работы механизма является необходимым требованием, выполнение которого обеспечивает минимальную стоимость электрооборудования, высокую надежность работы и наименьшие потери электроэнергии в эксплуатации. Выбор электродвигателя осуществляется на стадии проектирования электроприводов. На этом этапе необходимо выбрать тип, исполнение и мощность электродвигателя, а затем его рабочие свойства и регулировочные свойства. Излагаемые в дисциплине «Исполнительные устройства систем безопасности» принципы построения, конструктивные особенности, параметры, характеристики электромеханических средств позволят студентам обоснованно использовать их при проведении инженерных расчетов при проектировании исполнительных устройств применяемых в системах безопасности. Задачей данного проекта является расчет и построение основных характеристик электропривода с двигателем постоянного тока. 3 Глава 1. Теоретические сведения Электрический двигатель – электрическая машина (электромеханический преобразователь), в который электрическая энергия преобразуется в механическую. В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора или индуктора и подвижной части — ротора или якоря. В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты. По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности. Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока. Двигатель постоянного тока Правильнее было бы назвать "не фазный" электрический двигатель, переключение фаз которого осуществляется прямо в самом двигателе. Благодаря этому такой двигатель может питаться постоянным током, но так же и переменным. Данная группа двигателей в свою очередь разделяется по способу переключения фаз и наличию обратной связи подразделяется на: 1. Коллекторные двигатели; 2. Вентильные двигатели. Щёточно-коллекторный узел обеспечивает электрическое синхронное переключение цепей вращающейся части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.[1] По типу возбуждения коллекторные двигатели можно разделить на: 1. Двигатели с независимым возбуждением от электромагнитов и постоянных магнитов; 2. Двигатели с самовозбуждением. Двигатели с самовозбуждением делятся на: 1. Двигатели с параллельным возбуждением (обмотка якоря включается параллельно обмотке возбуждения); 2. Двигатели последовательного возбуждения (обмотка якоря включается последовательно обмотке возбуждения); 3. Двигатели смешанного возбуждения (часть обмотки возбуждения включается последовательно с якорем, а вторая часть — параллельно обмотке якоря или последовательно соединённым обмотке якоря и первой обмотки возбуждения, в зависимости от требуемой нагрузочной характеристики). 4 Вентильные двигатели (Бесколлекторные двигатели) -электродвигатели в котором переключение фаз осуществляется с помощью специального электронного блока (инвертора), могут быть с обратной связью с использованием датчика положения ротора, либо без обратной связи, фактически аналог асинхронного. Двигатель переменного тока Электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора, а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре. Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Синхронные электродвигатели подразделяются на: синхронный двигатель с обмотками возбуждения. Данные двигатели обычно используются при больших мощностях. синхронный двигатель с постоянными магнитами; синхронный реактивный двигатель; гистерезисный двигатель; шаговый двигатель; гибридный синхронный реактивный двигатель с постоянными магнитами; реактивно-гистерезисный двигатель. Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов. Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время. По количеству фаз двигатели переменного тока подразделяются на: однофазные — запускаются вручную, или имеют пусковую обмотку, или имеют фазосдвигающую цепь; двухфазные — в том числе конденсаторные; трёхфазные; многофазные; Свойства электродвигателей, имеющие значение для электропривода, полнее всего определяются по механическим характеристикам, 5 представляющим собой зависимость частоты вращения электродвигателя от электромагнитного момента, развиваемого им (n = f(M)). В тех случаях, когда необходимо связать работу двигателя с питающей сетью, полезны характеристики, выражающие зависимость между скоростью двигателя и током в его обмотках (n = f(I)), которые называются электромеханическими. Характеристики могут быть статическими, если они показывают поведение двигателя в установившемся режиме, т. е. когда его скорость становится постоянной при равенстве моментов двигателя и приводимого механизма. В случае, когда характеристики показывают поведение двигателя в переходных режимах, они называются динамическими. Характеристики двигателя называются естественными, если они получены при номинальных значениях: напряжения UN, частоты fN (для двигателей переменного тока), потока возбуждения ФN (для двигателей постоянного тока), а также при отсутствии добавочных сопротивлений в цепях обмоток двигателя. Характеристики, полученные при изменении хотя бы одного из перечисленных выше параметров, называются искусственными. Для того чтобы судить о работе системы «двигатель – рабочий механизм», нужно, помимо характеристик двигателя, знать характеристики рабочих механизмов. Механической характеристикой рабочего механизма называется зависимость между его частотой вращения и моментом сопротивления, который он создает при вращении (n = f(Mс)). По характеру действия все нагрузки можно разделить на реактивные и активные. Реактивными моментами сопротивления называются моменты сопротивления движению рабочего органа возникающие как реакция на это движение (примеры: сила терния, сила резания металла и т. д.). Эти моменты меняют свой знак при изменении знака скорости и всегда препятствуют движению. Активными (или потенциальными) называются моменты сопротивления, вызванные внешними по отношению к двигателю источниками энергии (сила тяжести, сила сжатой пружины, сила ветра). Направление их действия не зависит от направления движения электропривода, поэтому при одном направлении они будут оказывать тормозящее действие, при другом (например, при опускании груза) – будут помогать движению. 6 Глава 2.Технические параметры двигателя 1. Типоразмер двигателя М – 43; 2. Номинальная скорость ωн = 1000 об\мин; 3. Мощность Pн = 1,9 кВт; 4. Напряжение Uн = 110В; 5. Ток Iн = 21,0А; 6. Момент Mн = 18,2; 7. Магнитный поток Фн = 5,3∙10–3вб ; 8. КПД η = 82,3%; 9. Максимальная скорость при ослаблении потока nмакс = 2500 об\мин; 10.Момент инерции JД = 0,056 кг∙м2; 11.Число витков якоря Wя = 275 витк.; 12.Сопротивление якоря при 150С Rоя= 0,25 Ом; 13.Сопротивление добавочных полюсов при 150С Rдп= 0,162 Ом; 14.Число витков обмотки возбуждения на полюс Wв = 1550 витк.; 15.Сопротивление обмотки возбуждения в 150С Rв = 162 Ом; 16.Перегрузочная способность по току λ = 4; 0 Kt =1,32 –температурный коэффициент приведения сопротивлений к температуре tрасч= 1300С. Lя= 0,5 𝑈н 𝐼н∙𝑃н∙𝜔н – расчетная величина индуктивности обмотки якоря, где Pн =2 – число пар полюсов, ωн[ рад с ]. 7 Глава 3. Расчет коэффициентов уравнения «вход–выход». Рассчитываем уравнение «вход – выход» двигателя постоянного тока независимого возбуждения: 𝑈я 𝑅 𝜔= − ∙ 𝑀 (1) 𝐾е 𝐾𝑒 𝐾𝑀 где UЯ – (UЯН=110В) – напряжение на якоре; R – (R=(rЯ + rДП)∙К t=(0,25Ом + 0,162Ом)∙1,32 = 0,54384Ом – собственное сопротивление якоря; wн=1550 об/мин=162,3 рад/c 𝐾𝑀 = 𝐾𝐸 = МН 𝐼ЯН 𝐸𝐻 𝑊𝐻 = = 18,2 = 0,866 Н∙м/А; 21 𝑈Я𝐻 −𝐼Я𝐻 ∙𝑅 𝑊𝐻 = 110−21∙0,54384 162,3 = 0,607 В∙с/рад; После подстановки исходных данных в формулу (1) получим: 𝜔 = 1,07 ∙ 𝑈Я𝐻 − 0,104 ∙ 𝑀(2) 𝜔 = 1,07 ∙ 𝑈Я𝐻 − 0,104 ∙ 𝑀 = 1,07∙110 – 0,104∙18,2= 115,8 рад/с 8 Глава 4. Построить графики механических характеристик Для выполнения данного пункта нам необходимо выполнить следующие пункты: a)при rдоб 0 , U в U в ном и трех значений напряжения на якоре: U я U я ном , U я 0,6U я ном ; U я 0,3U я ном . Rдоб = 0 Для построения характеристик требуется по 2 точки для каждой прямой При М = 18,2Н∙м ω1 = 1,07 ∙ 110 − 0,104 ∙ 18,2 = 115,8 рад/с при Uя = 110 В; Uя=Uя ном ω2= 1,07 ∙ 66 − 0,104 ∙ 18.2 = 68,73 рад/с при Uя = 66 В; Uя=0,6Uя ном ω3 = 1,07 ∙ 33 − 0,104 ∙ 18.2 = 33,42 рад/с при Uя = 33 В; Uя=0,3Uя ном при М=0 Н∙м : ω1=117,7 рад/с; ω2=70,62 рад/с; ω3=35,31 рад/с. По полученным точкам построим характеристики (см. рисунок 1) ω,рад/с 140 120 100 ω1 (М) 80 ω2(м) 60 ω3(м) 40 20 0 0 5 10 15 20 М,Н∙м Рис. 1. Механические характеристики. 1. Естественная механическая характеристика исполнительного механизма. 2. еханическая характеристика исполнительного механизма при Uя =0,6Uя 3. Механическая характеристика исполнительного механизма при Uя =0,3Uя 9 б) при rдоб 0 , U я U я ном и трех значений напряжения на обмотке возбуждения: U в 0,6U в ном ; U в 0,8U в ном ; U в 1,2 U в ном . Для построения характеристик требуется по 2 точки для каждой прямой При М= 18,2 Н∙м ω1 = 1,07 ∙ 66 − 0,104 ∙ 18,2 = 68,73 рад/с при Uя = 66 В; ω2 = 1,07 ∙ 88 − 0,104 ∙ 18,2 = 92,27 рад/с при Uя = 88 В; ω3 = 1,07 ∙ 132 − 0,104 ∙ 18,2 = 139,35 рад/с при Uя = 132 В; При М= 0 Н∙м : ω1= 70,62 рад/с ω2= 94,16 рад/с ω3=141,24 рад/с По полученным точкам построим характеристики (см. рисунок 2). ω,рад/с 160 140 120 100 ω1(М) 80 ω2(М) 60 ω3(М) 40 20 0 0 5 10 15 М,Н∙м 20 Рис. 2. Механические характеристики. 1. Механическая характеристика исполнительного механизма при Uв =0,6Uв 2. Механическая характеристика исполнительного механизма при Uв =0,8Uв 3. Механическая характеристика исполнительного механизма при Uя =1,2Uя в) при U я U я ном и U в U в ном рассчитать значения добавочных сопротивлений rдоб в цепи якоря, чтобы скорость вращения якоря при номинальном моменте нагрузки M c M ном составила 75%, 50%, 25%, от 10 номинальной скорости. Построить графики f (M) , на которых отложить точки соответствующие указанным значениям скорости. При М= 18,2 Н∙м ωном = 115,8 рад/с Mн = 18,2; Rдоб=((Uя\Kе)Мд–ω∙Мд)∙КеКм-R Rдоб = (((110\0,607)∙18,2–115,8 ∙18,2)∙0,607∙0,866)–0.54384=625Ом 0,75 ωном = 86.85 рад/с 𝑈я Rдоб = (( ∙Мд – ω∙Мд)∙КЕ∙КМ )– 0.54384= 902 Ом 𝐾е 0,5 ωном = 57,6 рад/с 𝑈я Rдоб = (( ∙Мд – ω∙Мд)∙КЕ∙КМ )– 0.54384= 1181 Ом 𝐾е 0,25 ωном = 28,95 рад/с 𝑈я Rдоб = (( ∙Мд – ω∙Мд)∙КЕ∙КМ )– 0.54384= 1456Ом 𝐾е При М= 0 Н∙м ω1 = ω2= ω3= ω4 =117,7 рад/с По полученным точкам построим характеристики (см. рисунок 3). 140 ω,рад/с 120 100 ω1(М) 80 ω2(М) 60 ω3(М) 40 20 0 М,Н∙м 0 5 10 15 20 Рис. 3. Механические характеристики. 1) Механическая реостатная характеристика исполнительного механизма, обеспечивающая при номинальном моменте нагрузки при w=0.75wн 2) Механическая реостатная характеристика исполнительного механизма, обеспечивающая при номинальном моменте нагрузки при w=0.5wн 3) Механическая реостатная характеристика исполнительного механизма, обеспечивающая при номинальном моменте нагрузки при w=0.25wн 11 Глава 5. Построение графиков регулировочных характеристик Построить графики регулировочных характеристик при rдоб 0 , M c M я ном и трех значений напряжения на обмотке возбуждения: U в 0,8U в ном ; U в U в ном ; U в 1,2U в ном . Для построения регулировочных характеристик воспользуемся формулой (1). Учитывая, что rдоб=0 Ом и МС=МЯ ном 1 𝑅𝑠 𝑤= ∙𝑈− ∙ 𝑀ном 𝑘𝐸 𝑘𝐸 ∙ 𝑘𝑀 Для построения характеристик требуется по 2 точки для каждой прямой. При U = 110В ω1 = 1.65 ∙ 88 − 1,035 ∙ 18,2 = 126,36 рад/с ω2 = 1.65 ∙ 110 − 1,035 ∙ 18,2 = 162,66 рад/с ω3 = 1.65 ∙ 132 − 1,035 ∙ 18,2 = 198,96 рад/с При U = 20 В ω1 = 1.65 ∙ 16 − 1,035 ∙ 18,2 = 7.56 рад/с ω2 = 1.65 ∙ 20 − 1,035 ∙ 18,2= 14.16 рад/с ω2 = 1.65 ∙ 24 − 1,035 ∙ 18,2= 20.76 рад/с По полученным точкам построим характеристики (см. рисунок 4). ω,рад/с 250 200 ω1(U) 150 ω2(U) 100 ω3(U) 50 0 0 20 40 60 80 100 U,B 120 Рис. 4. Регулировочная характеристика. 1) Регулировочная характеристика при уменьшенном напряжении на обмотке возбуждения Uв=0,8Uн; 2) Регулировочная характеристика при уменьшенном напряжении на обмотке возбуждения Uв=Uн; 3) Регулировочная характеристика при уменьшенном напряжении на обмотке возбуждения Uв=1,2Uн; 12 Заключение В ходе выполнения курсового проекта были изучены основы расчета и построения механических характеристик двигателя постоянного тока, пусковой характеристики двигателя постоянного тока, регулировочных характеристик двигателя постоянного тока, разгонной характеристики двигателя постоянного тока. Были рассчитаны коэффициенты уравнения «Вход-выход». В соответствии с типом двигателя была спроектирована принципиальная схема регулятора двигателя постоянного тока независимого возбуждения согласно своему варианту. 13 Литература 1. Алиев Н.Н. Справочник по электротехнике и электрооборудованию. М.: Высшая школа, 2000г. 2. Кириллов А.В. и др. Электрический привод. Курс лекций. Уральский федеральный университет. Екатеринбург, 2016г. 3. Чиликин М.Г., Сандлер А.С. Общий курс электропривода М.: Энергоиздат, 1981г. 4. Подлипенский В.С., Сабинин Ю.А., Юрчук Л.Ю. Элементы устройства автоматики. С-П.: Политехника, 1995г. 5. Международный Интернет портал [Электронный ресурс] –URL: 6. http://www.induction.ru/library/book_002/glava8/8-4.html 7. Международный Интернет портал [Электронный ресурс] –URL: 8. http://electrono.ru/elektricheskie-mashiny-postoyannogo-toka/28-obmotkiyakorya 9. Международный Интернет портал [Электронный ресурс] –URL: 10. http://studopedia.ru/10_151432_mehanicheskaya-harakteristika-dvigatelyapostoyannogo-toka-nezavisimogo-vozbuzhdeniya-dpt-nv.html 11. 8Международный Интернет портал [Электронный ресурс] –URL: 12. http://www.elec.ru/articles/o-elektrodvigateljakh/ 14