С. В. БОРЗУНОВ,
С. Д. КУРГАЛИН
АЛГЕБРА И ГЕОМЕТРИЯ
С ПРИМЕРАМИ
НА PYTHON
УЧЕБНОЕ ПОСОБИЕ
САНКТПЕТЕРБУРГ • МОСКВА • КРАСНОДАР
2020
УДК 512+514+519.6+004.4
ББК 22.14; 22.15; 32.97я73
Б 82
Борзунов С. В. Алгебра и геометрия с примерами на Python :
учебное пособие для вузов / С. В. Борзунов, С. Д. Кургалин. —
СанктПетербург : Лань, 2020. — 444 с. — Текст : непосредствен
ный.
ISBN 9785811454891
Учебное пособие является современным введением в линейную
алгебру и аналитическую геометрию для студентов естественнонаучных
факультетов вузов. Базовые алгоритмы алгебры и геометрии
представлены на языке программирования Python.
УДК 512+514+519.6+004.4
ББК 22.14; 22.15; 32.97я73
Рецензенты:
А. Г. БУХОВЕЦ — доктор технических наук, профессор, профессор кафедры
экономического анализа, статистики и прикладной математики Воронежского
государственного аграрного университета им. Императора Петра I;
С. Г. ТИХОМИРОВ — доктор технических наук, профессор, профессор кафедры
информационных и управляющих систем Воронежского государственного
университета инженерных технологий.
Обложка
П. И. ПОЛЯКОВА
© Издательство «Лань», 2020
© С. В. Борзунов, С. Д. Кургалин, 2020
© Издательство «Лань»,
художественное оформление, 2020
Оглавление
Список основных обозначений . . . . . . . . . . . . . . . . . .
8
Предисловие . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
Глава 1. Матрицы и матричные алгоритмы . . . . . .
1.1. Матрицы и операции над ними . . . . . . . . . . . . . .
1.2. Понятие алгоритма. Корректность алгоритмов . . . . .
1.3. Оценка эффективности алгоритмов . . . . . . . . . . .
1.4. Простейшие операции с матрицами на Python . . . . .
1.4.1. Библиотека NumPy . . . . . . . . . . . . . . .
1.5. Матричные алгоритмы в теории графов . . . . . . . .
Контрольные вопросы к главе «Матрицы и матричные
алгоритмы» . . . . . . . . . . . . . . . . . . . . . . . . .
Задачи для самостоятельного решения . . . . . . . . .
Ответы и решения к главе «Матрицы и матричные
алгоритмы» . . . . . . . . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
17
17
28
30
32
35
35
. . . .
. . . .
41
42
. . . .
51
.
.
.
.
.
.
.
Глава 2. Алгебра матриц . . . . . . . . . . . . . . . . . . .
2.1. Определители матриц. Определители второго и третьего
порядка . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2. Определители n-го порядка. Миноры . . . . . . . . . . .
2.3. Общие свойства определителей.
Элементарные преобразования матрицы . . . . . . . . .
2.4. Обратная матрица . . . . . . . . . . . . . . . . . . . . . .
2.5. Целочисленные степени матриц . . . . . . . . . . . . . .
2.5.1. Метод математической индукции . . . . . . . .
2.6. Функции от матриц . . . . . . . . . . . . . . . . . . . . .
2.6.1. Экспонента и логарифм . . . . . . . . . . . . .
2.7. Ранг матрицы . . . . . . . . . . . . . . . . . . . . . . . .
Контрольные вопросы к главе «Алгебра матриц» . . . .
Задачи для самостоятельного решения . . . . . . . . . .
Ответы и решения к главе «Алгебра матриц» . . . . . .
3
.
.
.
.
.
.
.
.
.
.
.
.
.
.
. . .
62
. . .
. . .
62
64
.
.
.
.
.
.
.
.
.
.
66
68
71
71
75
76
78
83
84
96
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
ОГЛАВЛЕНИЕ
Глава 3. Системы линейных уравнений . . . . . . . . . . . .
3.1. Метод Крамера . . . . . . . . . . . . . . . . . . . . . . . . . .
3.2. Метод обратной матрицы . . . . . . . . . . . . . . . . . . . . .
3.3. Метод Гаусса . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.4. Фундаментальная совокупность решений однородной системы
уравнений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3.5. Общее решение неоднородной системы уравнений . . . . . . .
Контрольные вопросы к главе «Системы линейных
уравнений» . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Задачи для самостоятельного решения . . . . . . . . . . . . .
Ответы и решения к главе «Системы линейных
уравнений» . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
139
140
142
144
Глава 4. Комплексные числа и матрицы . . . . . . .
4.1. Арифметические операции с комплексными числами
4.2. Основная теорема алгебры . . . . . . . . . . . . . . .
4.3. Формула Кардано . . . . . . . . . . . . . . . . . . . .
4.4. Матрицы с комплексными коэффициентами . . . . .
4.4.1. Эрмитовы матрицы . . . . . . . . . . . . .
4.4.2. Унитарные матрицы . . . . . . . . . . . . .
4.5. Основы квантовых вычислений . . . . . . . . . . . .
4.5.1. Матрицы Паули и матрицы Дирака . . . .
4.5.2. Основные операции над кубитами . . . . .
Контрольные вопросы к главе «Комплексные числа
и матрицы» . . . . . . . . . . . . . . . . . . . . . . . .
Задачи для самостоятельного решения . . . . . . . .
Ответы и решения к главе «Комплексные числа
и матрицы» . . . . . . . . . . . . . . . . . . . . . . . .
187
187
192
193
195
195
196
197
200
201
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
153
158
160
161
166
. . . . . 205
. . . . . 207
. . . . . 217
Глава 5. Векторные пространства . . . . . . . . . . . . . .
5.1. Линейная зависимость векторов в пространстве Rn . . . .
5.2. Базис в пространстве Rn . . . . . . . . . . . . . . . . . . .
5.3. Евклидово векторное пространство . . . . . . . . . . . . .
5.4. Собственные значения и собственные векторы матрицы .
Контрольные вопросы к главе «Векторные пространства»
Задачи для самостоятельного решения . . . . . . . . . . .
Ответы и решения к главе «Векторные пространства» . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
232
233
234
237
239
245
246
251
Глава 6. Векторы в трехмерном пространстве . . . . . . . . 269
6.1. Декартова система координат . . . . . . . . . . . . . . . . . . 270
6.2. Скалярное произведение векторов . . . . . . . . . . . . . . . . 272
ОГЛАВЛЕНИЕ
6.3. Векторное произведение векторов . . . . . . . . . . . .
6.3.1. Свойства векторного произведения . . . . . .
6.4. Смешанное произведение векторов . . . . . . . . . . .
6.4.1. Свойства смешанного произведения . . . . .
6.5. Двойное векторное произведение . . . . . . . . . . . . .
Контрольные вопросы к главе «Векторы в трехмерном
пространстве» . . . . . . . . . . . . . . . . . . . . . . .
Задачи для самостоятельного решения . . . . . . . . .
Ответы и решения к главе «Векторы в трехмерном
пространстве» . . . . . . . . . . . . . . . . . . . . . . .
5
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
274
274
276
277
279
. . . . 279
. . . . 280
. . . . 283
Глава 7. Уравнение прямой на плоскости . . . . . . . . .
7.1. Уравнение прямой с угловым коэффициентом . . . . . . .
7.2. Общее уравнение прямой . . . . . . . . . . . . . . . . . . .
7.3. Уравнение прямой с угловым
коэффициентом, проходящей через заданную точку . . . .
7.4. Уравнение прямой, проходящей через две заданные точки
7.5. Угол между двумя прямыми . . . . . . . . . . . . . . . . .
7.6. Уравнение прямой в отрезках . . . . . . . . . . . . . . . .
7.7. Нормальное уравнение прямой . . . . . . . . . . . . . . . .
7.8. Отрезки прямых . . . . . . . . . . . . . . . . . . . . . . . .
Контрольные вопросы к главе «Уравнение прямой
на плоскости» . . . . . . . . . . . . . . . . . . . . . . . . .
Задачи для самостоятельного решения . . . . . . . . . . .
Ответы и решения к главе «Уравнение прямой
на плоскости» . . . . . . . . . . . . . . . . . . . . . . . . .
Глава 8. Уравнение плоскости в пространстве . . . . .
8.1. Уравнение плоскости, ортогональной заданному вектору
и проходящей через заданную точку . . . . . . . . . . . .
8.2. Общее уравнение плоскости . . . . . . . . . . . . . . . .
8.3. Уравнение плоскости в отрезках . . . . . . . . . . . . . .
8.4. Нормальное уравнение плоскости . . . . . . . . . . . . .
8.5. Уравнение плоскости, проходящей через заданную точку
параллельно двум заданным векторам . . . . . . . . . .
8.6. Уравнение плоскости, проходящей через
три заданные точки . . . . . . . . . . . . . . . . . . . . .
8.7. Угол между двумя плоскостями . . . . . . . . . . . . . .
8.8. Расстояние от точки до плоскости . . . . . . . . . . . . .
8.9. Пучок плоскостей . . . . . . . . . . . . . . . . . . . . . .
. . 290
. . 290
. . 291
.
.
.
.
.
.
.
.
.
.
.
.
292
293
294
295
296
300
. . 303
. . 304
. . 307
. . . 320
.
.
.
.
.
.
.
.
.
.
.
.
320
321
321
322
. . . 324
.
.
.
.
.
.
.
.
.
.
.
.
324
325
325
326
6
ОГЛАВЛЕНИЕ
Контрольные вопросы к главе «Уравнение плоскости
в пространстве» . . . . . . . . . . . . . . . . . . . . . . . . . . 327
Задачи для самостоятельного решения . . . . . . . . . . . . . 327
Ответы и решения к главе «Уравнение плоскости
в пространстве» . . . . . . . . . . . . . . . . . . . . . . . . . . 328
Глава 9. Уравнение прямой в пространстве . . . . . . . .
9.1. Уравнение прямой, проходящей через заданную точку
параллельно заданному вектору . . . . . . . . . . . . . . .
9.2. Уравнение прямой, проходящей через две заданные точки
9.3. Угол между двумя прямыми . . . . . . . . . . . . . . . . .
9.4. Угол между прямой и плоскостью . . . . . . . . . . . . . .
9.5. Условие принадлежности двух прямых одной плоскости .
Контрольные вопросы к главе «Уравнение прямой
в пространстве» . . . . . . . . . . . . . . . . . . . . . . . .
Задачи для самостоятельного решения . . . . . . . . . . .
Ответы и решения к главе «Уравнение прямой
в пространстве» . . . . . . . . . . . . . . . . . . . . . . . .
. . 334
.
.
.
.
.
.
.
.
.
.
334
335
336
337
338
. . 341
. . 341
. . 343
Глава 10. Билинейные и квадратичные формы . . . . . . . .
10.1. Билинейные формы . . . . . . . . . . . . . . . . . . . . . . . .
10.2. Квадратичные формы . . . . . . . . . . . . . . . . . . . . . . .
10.3. Приведение квадратичной формы к каноническому виду . . .
10.3.1. Метод Лагранжа выделения полных квадратов . . .
10.3.2. Метод Якоби . . . . . . . . . . . . . . . . . . . . . .
Контрольные вопросы к главе «Билинейные и квадратичные
формы» . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Задачи для самостоятельного решения . . . . . . . . . . . . .
Ответы и решения к главе «Билинейные и квадратичные
формы» . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
348
348
350
352
353
356
Глава 11. Кривые второго порядка . . . . . . . . .
11.1. Эллипс . . . . . . . . . . . . . . . . . . . . . . . .
11.2. Гипербола . . . . . . . . . . . . . . . . . . . . . .
11.3. Парабола . . . . . . . . . . . . . . . . . . . . . . .
11.4. Вырожденные кривые . . . . . . . . . . . . . . . .
11.4.1. Мнимый эллипс . . . . . . . . . . . . . .
11.4.2. Пара пересекающихся прямых . . . . .
11.4.3. Пара мнимых пересекающихся прямых
11.4.4. Пара параллельных прямых . . . . . . .
11.4.5. Пара мнимых параллельных прямых .
370
370
374
376
377
377
378
378
378
378
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
357
358
359
ОГЛАВЛЕНИЕ
7
11.4.6. Пара совпадающих прямых . . . . . . . . . . . .
11.5. Алгоритм вычисления координат точек касания кривой
второго порядка и прямой . . . . . . . . . . . . . . . . . .
Контрольные вопросы к главе «Кривые второго порядка»
Задачи для самостоятельного решения . . . . . . . . . . .
Ответы и решения к главе «Кривые второго порядка» . .
.
.
.
.
.
.
.
.
379
382
383
385
Глава 12. Эллиптические кривые . . . . . . . . . . . . . .
12.1. Операция сложения точек эллиптической кривой . . . .
12.1.1. Сложение точки с O . . . . . . . . . . . . . . .
12.1.2. Сложение двух различных точек . . . . . . . .
12.1.3. Сложение двух противоположных точек . . . .
12.1.4. Удвоение точки . . . . . . . . . . . . . . . . . .
12.2. Эллиптические кривые с рациональными точками . . . .
12.3. Реализация алгоритма сложения . . . . . . . . . . . . . .
Контрольные вопросы к главе «Эллиптические кривые»
Задачи для самостоятельного решения . . . . . . . . . .
Ответы и решения к главе «Эллиптические кривые» . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
396
397
399
400
401
402
406
408
413
414
416
.
.
.
.
.
.
.
.
.
.
.
. . 379
Приложение A. Основные операторы в Python и C . . . . . 421
Приложение B. Тригонометрические формулы . . . . . . . . 425
Приложение C. Греческий алфавит . . . . . . . . . . . . . . . 427
Список литературы
. . . . . . . . . . . . . . . . . . . . . . . . . 428
Указатель имен . . . . . . . . . . . . . . . . . . . . . . . . . . . . 435
Предметный указатель . . . . . . . . . . . . . . . . . . . . . . . 436
Список основных обозначений
N
множество натуральных чисел
Z
множество целых чисел
Q
множество рациональных чисел
R
множество вещественных чисел
C
множество комплексных чисел
Rn
n-мерное арифметическое пространство
∅
пустое множество
A⇒B
логическое следствие или импликация
A⇔B
логическая эквивалентность
∀x(P (x))
для всех x верно утверждение P (x)
∃x(P (x))
существует такое x, что верно утверждение P (x)
AиB
конъюнкция логических выражений A и B
A или B
дизъюнкция логических выражений A и B
A≡B
тождественное равенство
{a1 , a2 , . . . , an } множество, состоящее из элементов a1 , a2 , . . . , an
n
ai
сумма a1 + a2 + . . . + an
i=1
n
i=1
ai
произведение a1 a2 . . . an
A = (aij )
матрица, образованная элементами aij
AT
матрица, транспонированная по отношению к A
СПИСОК ОСНОВНЫХ ОБОЗНАЧЕНИЙ
9
I
единичная матрица
O
нулевая матрица
δij
символ Кронекера
[A, B]
коммутатор матриц A и B
tr A
след матрицы A
O(g(n))
класс функций, растущих не быстрее функции g(n)
G(V, E)
граф G, в котором V — множество вершин, E — множество ребер
d(v)
степень вершины v графа
D(V, E)
ориентированный граф D, в котором V — множество
вершин, E — множество ребер
d+ (v)
полустепень исхода вершины v орграфа
d− (v)
полустепень захода вершины v орграфа
x
целая часть числа x (см. определение на стр. 97)
Mij
дополнительный минор элемента матрицы, стоящего
на пересечении i-й строки и j-го столбца
=
Aij
i+j
(−1) Mij
алгебраическое дополнение элемента aij
A−1
обратная матрица к матрице A
,...,ik
Mji11,j,i22,...,j
k
минор k-го порядка (см. стр. 78)
rk A
ранг матрицы A
eA или
exp A
экспонента от матрицы A
ln A
√
i = −1
логарифм от матрицы A
z∗
мнимая единица
комплексное число, сопряженное по отношению к
комплексному числу z
10
СПИСОК ОСНОВНЫХ ОБОЗНАЧЕНИЙ
|z|
модуль комплексного числа z
arg z
аргумент комплексного числа
ZH
эрмитово сопряженная матрица
|ψ
квантовое состояние
|0 , |1
базовые квантовые состояния кубита
σ 1 , σ2 , σ3
матрицы Паули
x
=
[x1 , . . . , xn ]T
вектор n-мерного линейного пространства Rn
0
нулевой вектор
x
Powered by TCPDF (www.tcpdf.org)
евклидова норма вектора x
Xо.о.
общее решение однородной системы линейных уравнений
Xч.н.
частное решение неоднородной системы линейных
уравнений
PrL a
проекция вектора a на прямую L (см. стр. 270)
i, j, k
орты декартовой системы координат
a⊥b
ортогональность векторов a и b
(a · b)
скалярное, или внутреннее, произведение векторов
a×b
векторное, или внешнее, произведение векторов
(a, b, c)
смешанное произведение
a×(b×c)
двойное векторное произведение
abs(x)
абсолютная величина вещественного числа x
sgn(x)
знак вещественного числа x
μ
нормирующий множитель (см. стр. 298 и 323)
δ
отклонение точки от прямой или от плоскости
A(x, y)
билинейная форма
СПИСОК ОСНОВНЫХ ОБОЗНАЧЕНИЙ
11
ω(x)
квадратичная форма
ε
эксцентриситет кривой второго порядка
Γ
эллиптическая кривая с вещественными точками
Ξ
эллиптическая кривая с рациональными точками
O
бесконечно удаленная точка эллиптической кривой
A⊕B
сумма двух точек A и B на эллиптической кривой
Предисловие
Бурное развитие информационных технологий (ИТ) предъявляет особые требования к подготовке молодых специалистов в этой области. Одновременно с быстрым ростом мощности современных вычислительных
систем растет и сложность задач, решаемых для нужд науки и техники,
промышленности и экономики. В связи с этим важным условием подготовки кадров в области ИТ становится получение фундаментальных
знаний для разработки математических основ и создания методов решения таких задач.
К важным разделам математики, идеи и результаты которых могут
использоваться при разработке информационных систем и в любом достаточно крупном бизнес-проекте, следует отнести алгебру и геометрию.
Базовыми понятиями алгебры являются числовые матрицы и методы
работы с ними — матричные алгоритмы. Они находят широкое применение в научно-технических задачах и в проектах игровой индустрии.
Бурное развитие игровых технологий, технологий дополненной и альтернативной реальности привело к необходимости уделять в университетском курсе геометрии особое внимание методам аналитической геометрии, свойствам фигур в трехмерном пространстве и быстрым алгоритмам работы с двух- и трехмерными объектами.
Еще одна перспективная область применения алгоритмов линейной
алгебры получила стремительное развитие буквально в последние годы — это работа с «большими данными» (Big Data). Анализ предельно
больших массивов данных требует применения не только известных методов, но и ставит задачу разработки новых подходов и высокоэффективных алгоритмов.
Настоящее учебное пособие является введением в линейную алгебру и аналитическую геометрию для студентов естественно-научных факультетов вузов. Оно создано на основе курсов «Алгебра и геометрия»,
«Аналитическая геометрия» и «Фундаментальная и компьютерная алгебра», которые преподаются для студентов первого курса факультета
компьютерных наук Воронежского государственного университета. Пособие предназначено как для теоретической подготовки (в качестве до-
ПРЕДИСЛОВИЕ
13
полнения к известным учебникам), так и для проведения практических
и лабораторных занятий, а также для самостоятельной работы.
В данной книге термин «алгебра» будем считать эквивалентным термину «линейная алгебра», а «геометрия» — термину «аналитическая геометрия».
Авторы стремились сделать изложение материала максимально доступным, не теряя при этом строгости в формулировках определений и
теорем. Утверждения (теоремы, свойства) сопровождаются доказательствами, либо даются ссылки на специальную литературу, где они приводятся для углубленного изучения материала.
Отметим, что в настоящем пособии фундаментальные основы алгебры и геометрии представлены в учебно-методической форме, наиболее подходящей для курсов подготовки будущих ИТ-специалистов. Рассмотрены базовые алгоритмы работы с матрицами, векторами, системами линейных уравнений. Теоретический материал содержит решения
основных типов задач и дополняется большим количеством подробно
разобранных примеров. Окончание примеров обозначается символом .
В конце каждой главы приведены задачи для самостоятельной работы.
Ко многим задачам для самостоятельной работы приводятся не только
полные ответы, но и даются развернутые решения. Знаком ∗ отмечены
задания повышенной сложности.
Отличительной особенностью книги является ее направленность на
применение в учебном процессе факультетов, ведущих подготовку специалистов в области информационно-коммуникационных технологий. Помимо разделов, традиционно включаемых в курсы алгебры и геометрии,
одна из глав пособия посвящена математическим основам современного раздела криптографии, а именно криптографии на эллиптических
кривых. Наличие данного раздела послужит связующим звеном между
математическими курсами и методами, применяемыми в практической
деятельности разработчиков программного обеспечения.
Методы современной алгебры и геометрии находят широкое применение в компьютерных науках. Одному из примеров приложений алгебры
посвящен раздел о квантовых вычислениях. В нем показано, что понятия линейной алгебры используются для построения новых алгоритмов,
вычислительная мощь которых значительно превосходит существующие.
Кратко остановимся на содержании пособия. Первые четыре главы
посвящены классическим разделам линейной алгебры, в них рассматриваются матрицы и определители, системы линейных уравнений, даются
понятия векторного пространства и фундаментального решения однородной системы уравнений. Следующие несколько глав знакомят читателя с основами векторной алгебры и координатного метода на плоскости
14
ПРЕДИСЛОВИЕ
и в трехмерном пространстве, здесь рассмотрены темы: векторы в трехмерном пространстве, уравнение прямой на плоскости, уравнение плоскости в пространстве, уравнение прямой в пространстве. Анализируются
кривые второго порядка. Глава «Эллиптические кривые» обычно остается за рамками традиционного курса алгебры и геометрии. Тем не менее
ее присутствие в книге, на наш взгляд, способствует более глубокому пониманию методов линейной алгебры и аналитической геометрии и дает
пример реализации таких методов для решения задач теоретической и
практической криптографии.
В качестве языка программирования для иллюстрации рассматриваемых алгоритмов используется Python. Это позволяет знакомить читателей с методами решения практических задач уже на первоначальном этапе освоения учебного материала. Выбор языка Python обусловлен тем, что он является универсальным и широко распространенным
языком программирования общего назначения, подходящим для успешной реализации численных алгоритмов. Язык Python постоянно развивается, многие его реализации являются программным обеспечением с
открытым кодом. Он широко распространен, обладает необходимыми
средствами автоматической проверки ошибок, которые могут появиться
в программном коде в процессе его создания. Наличие большого количества дополнительных библиотек (таких как NumPy, SciPy, pandas) значительно расширяет возможности программиста. Таким образом, этот
язык вполне подходит для обучения методам разработки и анализа алгоритмов линейной алгебры и аналитической геометрии.
В примерах мы используем Python 3. Хотя более ранняя версия
(Python 2) еще распространена во многих значимых проектах на момент
написания книги и широко освещена в учебной литературе, официальная поддержка Python 2 ограничена, и запланировано ее завершение.
Заметим, что имеются существенные различия между этими двумя версиями языка, но доступны методы для преобразования кода из Python 2
в Python 3 (подробнее см. официальную страницу Python:
https://www.python.org/).
В книге приводится список учебной литературы по линейной алгебре
и аналитической геометрии, которая может быть использована для более
детального изучения вопросов, затронутых в данном пособии.
Приложения содержат справочную информацию, включающую перечень операторов Python и C, основные тригонометрические формулы
и греческий алфавит. Эти материалы позволят снизить потребность в
обращении к справочной литературе.
Заключительная часть книги содержит именной и предметный указатели.
ПРЕДИСЛОВИЕ
15
Ниже представлена схема информационной зависимости глав книги
в виде ориентированного графа, отображающего предпочтительный порядок изучения учебного материала. Например, после изучения глав 1,
2 и 3 можно перейти к одной из двух глав: 4 или 6, содержание которых
является относительно независимым. После главы 9 главы 11 и 12 можно
осваивать в любом порядке.
Глава 1
Глава 2
Глава 3
Глава 4
Глава 5
Глава 6
Глава 7
Глава 8
Глава 9
Глава 10
Глава 11
Глава 12
Схема информационной зависимости глав учебного пособия
16
ПРЕДИСЛОВИЕ
Благодарности
Авторы выражают искреннюю признательность своим коллегам за
полезные обсуждения и критические замечания. Большую пользу по
улучшению текста оказали ценные замечания А. В. Атанова, А. Г. Буховца, С. А. Запрягаева, Е. А. Киселева, А. В. Лободы, П. В. Лукина,
П. А. Мелешенко, Л. А. Минина, М. Е. Семенова, А. А. Федякова, Т. А. Чураковой.
Отладку и проверку программного кода, размещенного в книге, помогали осуществлять студенты факультета компьютерных наук Воронежского государственного университета А. В. Данилова, С. А. Зайцев,
Н. В. Пауков, А. С. Коновской, М. А. Теплякова, В. А. Ушаков.
На протяжении нескольких семестров рукопись этой книги служила в качестве основного учебного пособия для студентов Воронежского
государственного университета. Их заинтересованность и увлеченность
положительно повлияли на содержание учебного курса. Мы благодарим
всех студентов, прослушавших курс алгебры и геометрии, за найденные опечатки и неточности в первых вариантах рукописи. Большую
помощь в проверке решений и ответов к задачам и упражнениям оказали студенты П. С. Бурдюг, К. И. Ганигин, Д. И. Демьянов, Е. Д. Коротеева, З. С. Корсаков, Д. В. Макушин, П. Л. Некрасов, Н. В. Салова,
Д. С. Тыняный, А. С. Цыбульская, А. А. Янкевич. Разумеется, все возможно оставшиеся в тексте ошибки исключительно на совести авторов.
С. Д. Кургалин выражает особую благодарность Ольге Кургалиной и
Александру Широкову за постоянную поддержку во время работы над
книгой.
Декабрь 2019 г.
С. В. Борзунов,
С. Д. Кургалин
Глава 1
Матрицы и матричные
алгоритмы
1.1.
Матрицы и операции над ними
Матрицей размера m × n называется прямоугольная таблица чисел,
в которой m строк и n столбцов.
Матрицу записывают в виде
⎤
⎡
a11 a12 . . . a1n
⎥
⎢
⎢ a21 a22 . . . a2n ⎥
⎥.
⎢
(1.1)
A=⎢
⎥
⎣. . . . . . . . . . . . . . . . . . ⎦
am1 am2 . . . amn
Обозначают матрицы обычно заглавными буквами латинского алфавита, например A, B, U, . . .
Числа aij , входящие в состав матрицы, — это ee элементы. Упорядоченный набор элементов ai1 , ai2 , . . . , ain матрицы A, имеющих одинаковый первый индекс i, называют i-й строкой матрицы, а упорядоченный
набор элементов a1j , a2j , . . . , amj , имеющих одинаковый второй индекс j,
называют j-м столбцом. Таким образом, первый индекс произвольного
элемента aij указывает номер строки, а второй индекс — номер столбца,
на пересечении которых находится этот элемент.
Широко применяется краткая запись матрицы:
A = (aij ), i = 1, 2, . . . , m; j = 1, 2, . . . , n.
(1.2)
Столбец n чисел называется также n-вектором, или просто вектором. Так, 1-вектор представляет собой единственное число, или, как
говорят, скаляр.
18
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
Примечание. Матрицы первоначально были введены для компактной
записи систем линейных уравнений. Сейчас они применяются в различных разделах математики, физики и их приложений для более простого представления различных математических операций над элементами
матриц.
Пример 1.1. Точка на экране компьютера в формате RGB представляется в виде 3-вектора с компонентами
⎡ ⎤
p
⎢ R⎥
⎢
(1.3)
P = ⎣ pG ⎥
⎦,
pB
где pR , pG , pB — вещественные числа из интервала [0, 1], они характеризуют интенсивность красной, зеленой и голубой составляющих цвета
соответственно. Различные комбинации значений компонент позволяет
получить любой цвет. В частности, векторы
⎡ ⎤
⎡
⎤
1
0,2
⎢ ⎥
⎢
⎥
⎥ и P2 = ⎢ 0,2 ⎥
(1.4)
P1 = ⎢
0
⎣ ⎦
⎣
⎦
0
0,6
определяют красный и темно-синий цвет соответственно.
Если выполняется условие m = n, то матрица называется квадратной матрицей порядка n. Если число строк не равно числу столбцов
и, тем самым, выполняется неравенство m = n, то такая матрица —
прямоугольная.
Примечание. Для представления матриц используются также обозначения
⎞
⎛
a
a11 a12 . . . a1n
11 a12 . . . a1n ⎟
⎜
a21 a22 . . . a2n ⎜ a21 a22 . . . a2n ⎟
⎟
⎜
(1.5)
⎜. . . . . . . . . . . . . . . . . .⎟ или . . . . . . . . . . . . . . . . . . .
⎠
⎝
am1 am2 . . . amn am1 am2 . . . amn
Элементами вещественных матриц являются вещественные числа
из множества R = (−∞, ∞), а элементы комплексных матриц являются комплексными числами.
Примечание. В стандартной математической записи индексы элементов начинаются с единицы: i, j = 1, 2, . . . Во многих языках программирования, в том числе в Python и C, строки и столбцы нумеруются от
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
19
нуля до m − 1 и n − 1 соответственно. На это различие следует обращать
внимание при реализации матричных алгоритмов на указанных языках.
Для матрицы A построим новую матрицу B, в которой строки и
столбцы поменяем местами:
⎡
a11 a21 . . . am1
⎤
⎥
⎢
⎢ a12 a22 . . . am2 ⎥
⎥
B=⎢
⎢. . . . . . . . . . . . . . . . .⎥ .
⎦
⎣
(1.6)
a1n a2n . . . amn
Полученная таким образом матрица B называется транспонированной по отношению к A и обозначается AT . Как легко видеть, повторное
применение операции транспонирования возвращает к исходной матрице: (AT )T = A.
Пример 1.2.
5 0 −4
Транспонированной по отношению к матрице A =
яв2 −1 3
⎡
⎤
5 2
⎢
⎥
⎥
ляется матрица AT = ⎢
⎣ 0 −1⎦.
−4 3
Пусть A — квадратная матрица. Ее главной диагональю называют набор элементов a11 , a22 , . . . , ann , имеющих одинаковые индексы, а
побочной диагональю, или кросс-диагональю, — набор элементов
an1 , a(n−1)2 , . . . , a1n матрицы.
Квадратную матрицу называют диагональной, если все ее элементы, расположенные вне главной диагонали, равны нулю:
⎡
d1 0 . . . 0
⎤
⎢
⎥
⎢ 0 d2 . . . 0 ⎥
⎢
⎥
⎢. . . . . . . . . . . . . .⎥ .
⎣
⎦
0
(1.7)
0 . . . dn
Если в диагональной матрице вида (1.7) для всех значений i = 1, 2, . . . ,
n справедливы равенства di = 1, то матрицу называют единичной и
обозначают через I, а если все элементы di = 0, то ее называют нулевой
20
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
и обозначают через O:
⎡
⎤
1 0 ... 0
⎢
⎥
⎢0 1 . . . 0⎥
⎢
⎥,
I=⎢
⎥
.
.
.
.
.
.
.
.
.
.
.
⎣
⎦
0 0 ... 1
⎡
0 0 ... 0
⎤
⎢
⎥
⎢0 0 . . . 0 ⎥
⎢
⎥.
O=⎢
⎥
.
.
.
.
.
.
.
.
.
.
.
⎣
⎦
0 0 ... 0
(1.8)
Для обозначения элементов единичной матрицы используется символ Кронекера1 , определяемый следующим образом:
1, если i = j,
δij =
(1.9)
0, если i = j.
Таким образом, в символических обозначениях имеем I = (δij ), где i, j =
1, 2 . . . , n.
Примечание. Часто в обозначении символа Кронекера индексы разделяют запятыми: δi,j .
Матрица A = (aij ) называется верхней треугольной, если aij = 0
при i > j, т. е. все элементы, расположенные ниже главной диагонали,
равны нулю. Аналогично матрица B = (bij ) называется нижней треугольной, если bij = 0 при i < j, т. е. все элементы выше главной
диагонали равны 0.
Верхнюю и нижнюю треугольную матрицу схематически можно обозначить, как показано на рис. 1.1.
⎡
⎢
⎢
⎢
⎢
A=⎢
⎢
⎢
⎣
⎤
0
⎡
⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
⎥, B = ⎢
⎥
⎢
⎥
⎢
⎦
⎣
⎤
0
⎥
⎥
⎥
⎥.
⎥
⎥
⎥
⎦
Рис. 1.1. Схематические обозначения для верхней A и нижней B
треугольных матриц. Цветом выделено расположение отличных
от нуля элементов
Квадратная матрица A = (aij ) называется симметричной, если для
всех значений i, j = 1, 2, . . . , n элементы aij = aji , иными словами, все
1
Кронекер (Leopold Kronecker) (1823–1891) — немецкий математик.
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
21
элементы, симметричные относительно главной диагонали, равны между
собой.
С учетом понятия транспонированной матрицы условие симметричности можно записать в виде равенства A = AT .
У антисимметричной матрицы элементы aij = −aji , где i, j =
= 1, 2, . . . , n.
Обратимся к понятию равенства матриц. Две матрицы A = (aij ) и
B = (bij ) размера m × n равны друг другу в том и только в том случае,
если aij = bij для всех i и j. Таким образом, свойство равенства может
выполняться только для матриц совпадающего размера.
Пример 1.3. Рассмотрим две матрицы C и D:
d2 −d
1 c2
, D=
,
(1.10)
C=
−c2 c4
d d2
где c и d — некоторые вещественные числа.
Равенство матриц C = D равносильно системе уравнений, отражающей равенство отдельных элементов:
⎧
⎪
d2 = 1,
⎪
⎪
⎪
⎨ c2 = −d,
(1.11)
2
⎪
=
d,
−c
⎪
⎪
⎪
⎩
c4 = d2 .
Значит, матрицы C и D равны, если и только если выполняются равенства c = ±1 и d = −1.
Пример 1.4. Двоичной матрицей, или (0, 1)-матрицей, называется матрица, элементы которой принимают значения 0 или 1. Вычислим,
сколько существует двоичных матриц размера m × n.
Каждый элемент такой матрицы может принимать только два значения. Поскольку в матрице, состоящей из m строк и n столбцов, всего
mn элементов, то получаем 2mn способов присвоить значения элементам.
Следовательно, количество двоичных матриц размера m × n равно 2mn .
Рассмотрим основные операции над матрицами. Операции над матрицами вводятся с помощью известных арифметических действий над
их элементами. Сложение и умножение вещественных чисел естественным образом переносятся на матрицы и образуют основные операции
матричной алгебры.
Суммой двух матриц A = (aij ) и B = (bij ) одинакового размера m×
n называют матрицу C = (cij ) того же размера, состоящую из элементов
cij = aij + bij . При этом для суммы матриц пишут C = A + B.
22
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
Заметим, что складывать можно только квадратные или прямоугольные матрицы одинаковых размеров.
Пример 1.5. Пусть даны две матрицы A и B:
2 0 −1
0 5 3
A=
, B=
.
(1.12)
1 3 4
2 1 4
Найдем их сумму A + B, выполнив операции сложения соответствующих элементов:
2 + 0 0 + 5 −1 + 3
2 5 2
A+B =
=
.
(1.13)
1+2 3+1 4+4
3 4 8
Произведение αA действительного числа α и матрицы A = (aij )
есть матрица C = (cij ), состоящая из элементов cij = α · aij .
Пример 1.6. Пустьзаданы вещественные
числа α =2, β = −3 и мат0 −1 2
0 −2 4
рица A =
. Тогда αA = 2A =
, βA = (−3)A =
−2 3 4
−4 6 8
0 3 −6
=
.
6 −9 −12
На основании введенных операций можно составить разность матриц
согласно определению: A − B = A + (−1)B. Таким образом, разность
матриц представляет собой не что иное, как сумму первого слагаемого
со вторым слагаемым, домноженным на число (−1).
Заметим, что для антисимметричной матрицы A имеет место равенство AT = −A.
Пример 1.7. Найдем разность матриц, определенных в примере 1.5:
2 0 −1
0 5 3
2 0 −1
0 5 3
A−B =
−
=
+ (−1)
=
1 3 4
2 1 4
1 3 4
2 1 4
2 + (−1)0 0 + (−1)5 −1 + (−1)3
2 −5 −4
=
=
.
1 + (−1)2 3 + (−1)1 4 + (−1)4
−1 2 0
Введенные операции обладают следующими свойствами, справедливыми для произвольных матриц A, B и C и всех λ, μ ∈ R:
1. A + B = B + A (коммутативность сложения);
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
23
2. (A + B) + C = A + (B + C) (ассоциативность сложения);
3. λ(μA) = (λ · μ)A;
4. λ(A + B) = λA + λB;
5. (λ + μ)A = λA + μA;
6. A + O = O + A = A.
Важнейшей операцией линейной алгебры является произведение матриц. Она на основе двух исходных матриц позволяет сконструировать
новую матрицу.
Чтобы ввести это понятие, обратимся сначала к одному частному
случаю. Произведением строки из n элементов на столбец из n элементов называется элемент, равный сумме произведений соответствующих
элементов строки и столбца:
⎡ ⎤
b1
⎥
⎢
⎢ b2 ⎥
⎢
(1.14)
a1 a2 . . . an ⎢ .. ⎥
⎥ = a1 b1 + a2 b2 + . . . + an bn .
⎣.⎦
bn
Пример 1.8. Вычислим произведение строки [1, 2, 4, 8, 16] на столбец
[16, 8, 4, 2, 1]T :
⎡ ⎤
16
⎢ ⎥
⎢8⎥
⎢ ⎥
⎢ ⎥
1 2 4 8 16 ⎢ 4 ⎥ = 1 · 16 + 2 · 8 + 4 · 4 + 2 · 8 + 1 · 16 = 80. (1.15)
⎢ ⎥
⎢2⎥
⎣ ⎦
1
Теперь обратимся к рассмотрению общего случая матриц произвольного размера.
Произведением матрицы A = (aij ) размера m × n и матрицы
B = (bij ) размера n × p называют матрицу C = (cij ) размера m × p,
элементы которой выражаются согласно правилу:
cij =
n
k=1
aik bkj .
(1.16)
24
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
Произведение матриц записывается так: C = A · B или C = AB.
Таким образом, элемент cij матрицы C = AB есть сумма произведений элементов i-й строки матрицы A на соответствующие элементы j-го
столбца матрицы B.
⎡
⎤
⎢
⎢
⎢
i-я ⎢a a
строка ⎣ i1 i2
⎡
⎢
⎥⎢
⎥⎢
⎥⎢
⎢
. . . ain ⎥
⎦⎢
⎢
⎣
⎤
⎡
⎥
⎥ ⎢
⎥ ⎢
⎥ ⎢
⎥=⎢
⎥ ⎣
⎥
⎦
b1j
b2j
..
.
⎤
cij
⎥
⎥
⎥
⎥ i-я
⎦строка
bnj
j-й
столбец
cij =
n
j-й
столбец
aik bkj
k=1
Рис. 1.2. Умножение матриц (aij ) и (bij )
1
2
Пример 1.9. Выполним операцию перемножения матриц
и
−3 4
−3 6
:
5 −4
1
2
−3 4
−3
5
6
−4
=
1 · (−3) + 2 · 5
1 · 6 + 2 · (−4)
=
(−3) · (−3) + 4 · 5 (−3) · 6 + 4 · (−4)
7 −2
=
. (1.17)
29 −34
Примечание. Введенное выше определение произведения матриц выглядит менее естественно, чем определение суммы. Однако именно такой
способ введения операции умножения позволяет в матричной алгебре сохранить многие свойства, характерные для произведения вещественных
чисел.
Выполняются следующие свойства:
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
25
1. A(B + C) = AB + AC, (B + C)A = BA + CA (дистрибутивность
умножения относительно сложения);
2. (AB)C = A(BC) (ассоциативность умножения);
3. OA = AO = O (свойство нулевой матрицы);
4. IA = AI = A (свойство единичной матрицы).
В общем случае в произведении матриц существенен их порядок, что
демонстрирует следующий пример.
2 −1
3 0
Пример 1.10. Пусть A =
иB=
.
1 0
1 −1
Тогда имеем:
2 −1 3 0
2 · 3 + (−1) · 1 2 · 0 + (−1) · (−1)
5 1
AB =
=
=
,
1 0
1 −1
1·3+0·1
1 · 0 + 0 · (−1)
3 0
(1.18)
в то же время произведение матриц, выполненное в другом порядке,
равно
3 0
2 −1
3·2+0·1
3 · (−1) + 0 · 0
6 −3
B A=
=
=
.
1 −1 1 0
1 · 2 + (−1) · 1 1 · (−1) + (−1) · 0
1 −1
(1.19)
Итак, умножение матриц некоммутативно, т. е. при перестановке
сомножителей результат может измениться.
Как непосредственно следует из определения произведения матриц,
их можно перемножать в том и только в том случае, когда число столбцов первого сомножителя — матрицы A, совпадает с числом строк второго сомножителя — матрицы B. Отметим также, что из существования
произведения AB не следует существование произведения BA.
Коммутатор матриц и след матрицы
Матрицы A и B называются коммутирующими (или перестановочными), если AB = BA. Коммутирующие матрицы обязательно
квадратные и имеют одинаковый порядок.
Коммутатором двух квадратных матриц одинакового порядка называется величина
[A, B] = AB − BA.
(1.20)
26
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
По определению для коммутирующих матриц выполняется условие
[A, B] = O.
Пример 1.11. Вычислим [A, B], если
⎡
⎤
⎡
⎤
−1 2 −2
1 0 −1
⎢
⎥
⎢
⎥
⎢
⎥
⎢
A = ⎣ 2 1 −1⎦ , B = ⎣−1 1 1 ⎥
(1.21)
⎦.
−1 −1 −1
2
0
0
Решение.
⎡
⎤ ⎡
⎤
0 −1
−7 2 3
⎢
⎥ ⎢
⎥ ⎢
⎥
⎥ ⎢
⎥ ⎢
⎥
AB = ⎢
⎣ 2 1 −1⎦ ⎣−1 1 1 ⎦ = ⎣−1 1 −1⎦ ,
−1 −1 −1
2 0 0
−2 −1 0
−1
⎡
2
−2
⎤
0 −1
⎢
⎥
⎥
BA = ⎢
−1
1
1
⎣
⎦
2 0 0
1
⎤ ⎡
1
⎡
−1
2
−2
⎤
⎡
0
3
−1
(1.22)
⎤
⎢
⎥ ⎢
⎥
⎢ 2 1 −1⎥ = ⎢ 2 −2 0 ⎥ ,
⎣
⎦ ⎣
⎦
−1 −1 −1
−2 4 −4
⎡
⎤
−7 −1 4
⎢
⎥
⎥
[A, B] = AB − BA = ⎢
⎣−3 3 −1⎦ .
0 −5 4
(1.23)
(1.24)
Пример 1.12. Докажем тождество Якоби2 , справедливое для коммутаторов любых матриц размера n × n:
[[P, Q], R] + [[Q, R], P ] + [[R, P ], Q] ≡ O.
(1.25)
Доказательство.
Воспользуемся определением коммутатора [P, Q] = P Q − QP , тогда
[[P, Q], R] = [P Q − QP, R] = (P Q − QP )R − R(P Q − QP ) =
= P QR − QP R − RP Q + RQP.
(1.26)
Далее аналогичным образом представим оставшиеся слагаемые в сумме:
[[Q, R], P ] = QRP − RQP − P QR + P RQ,
[[R, P ], Q] = RP Q − P RQ − QRP + QP R.
2
Яко́би (Carl Gustav Jacob Jacobi) (1804–1851) — немецкий математик.
(1.27)
(1.28)
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
27
Суммa величин (1.26), (1.27) и (1.28), как легко видеть после приведения подобных слагаемых, равна нулю. Тем самым тождество Якоби
доказано.
Следом tr A квадратной матрицы A = (aij ), где 1 i, j n, называется сумма ее диагональных элементов:
tr A =
n
aii .
(1.29)
i=1
Еще один способ обозначения следа матрицы A — Sp A, от немецкого
слова spur.
Пример 1.13. След единичной матрицы I размера n × n равен ее
порядку: tr I = n.
Оценка количества операций умножения при умножении
матриц
Для оценки времени работы вычислительных алгоритмов необходимо знать количество операций умножения, выполняемых в программе.
Определим это количество для операции умножения матриц.
Пусть обе матрицы произведения являются квадратными и имеют
одинаковый порядок n. Тогда AB представляет собой матрицу n × n.
Для вычисления всех элементов результата потребуются n2 умножений
строки на столбец. В каждом из таких умножений участвуют ровно n
операций умножения вещественных чисел. Следовательно, для определения произведения AB требуется n3 вещественных умножений.
Примечание. Существуют неэлементарные алгоритмы, позволяющие
выполнить умножение матриц за меньшее число операций. Одним из самых известных из таких алгоритмов является алгоритм Штрассена3 .
Заметим, что преимущества использования алгоритма Штрассена и аналогичных ему неэлементарных методов умножения матриц проявляются
только для достаточно больших значений размера матриц [47].
Современные научно-технические задачи, проекты игровой индустрии,
технологии дополненной и альтернативной реальности требуют быстрого
выполнения матричных операций над данными большого размера. В связи с этим такие действия над матрицами, как транспонирование, умножение и другие, в настоящее время выполняются с помощью методов
параллельного программирования. Работа с матрицами на высокопроизводительных параллельных системах имеет свои особенности, связанные
с методами представления данных в памяти компьютера и способами
3
Штрассен (Volker Strassen) (род. 1936) — немецкий математик.
28
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
межпроцессорного взаимодействия. В работах [35, 50, 71] приводятся базовые алгоритмы матричной алгебры, адаптированные для применения
на высокопроизводительных вычислительных системах. Примеры реализации таких алгоритмов приведены в [63].
Примечание. Как уже было указано выше, в качестве элементов матрицы рассматриваются вещественные или комплексные числа. Кроме того, это также могут быть и функции, над которыми можно производить
алгебраические операции. В таком случае говорят о функциональных
матрицах. В дальнейшем, если не оговорено иное, рассматриваются
только числовые матрицы.
1.2.
Понятие алгоритма. Корректность
алгоритмов
В разделе 1.4. будут приведены алгоритмы работы с матрицами на
языке Python. Поэтому ниже предварительно рассмотрим понятия алгоритма, корректности алгоритмов и укажем, как оценивается их эффективность.
Алгоритм — это точное предписание, определяющее вычислительный процесс, ведущий от варьируемых исходных данных к искомому
результату (данные — упорядоченный набор символов) [19]. Другими
словами, алгоритм описывает конкретную вычислительную процедуру,
с помощью которой решается вычислительная задача. Как правило, алгоритм используется для решения некоторого класса задач, а не одной
конкретной задачи [57, 28]. Термин «алгоритм» происходит от имени
средневекового математика аль-Хорезми́4 .
Понятие алгоритма относится к базовым, фундаментальным понятиям математики. Многие исследователи пользуются разными определениями понятия алгоритма, отличающимися друг от друга. Однако во всех
определениях явно или неявно подразумеваются следующие свойства
алгоритма [13].
1. Дискретность. Алгоритм должен представлять процесс решения
задачи как последовательное выполнение отдельных шагов. Выполнение
каждого шага алгоритма требует некоторого времени, и каждая операция осуществляется только целиком и не может осуществляться частично.
2. Элементарность шагов. Способ исполнения каждой команды должен быть известен и достаточно прост.
4
аль-Хорезми (Muh.ammad ibn Mūsā al-Khwārizmı̄) (ок. 780 — ок. 850) — выдающийся математик,
астроном, географ и философ. Термин «алгебра» происходит от названия его сочинения, содержащего общие приемы для решения задач, сводящихся к некоторым алгебраическим уравнениям [39].
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
29
3. Детерминированность (от латинского dētermināre — определять).
Каждый следующий шаг работы алгоритма однозначно определен. Для
одних и тех же исходных данных результат должен быть одним и тем же.
4. Направленность. Должно быть известно, что считать результатом
работы алгоритма.
5. Массовость. Требуется, чтобы была возможность применить алгоритм ко всем наборам исходных данных из определенного, заранее фиксированного множества.
Корректность алгоритмов
Рассмотрим алгоритм A, решающий конкретную вычислительную
задачу. Возможность применения данного алгоритма в компьютерной
программе требует обоснования правильного решения задачи для всех
входных данных, т. е. следует провести доказательство корректности алгоритма A. Для этого необходимо проследить все изменения значений переменных, которые происходят в результате работы алгоритма.
С математической точки зрения речь идет об установлении истинностных значений некоторых предикатов, описывающих переменные величины.
Пусть P — предикат, истинный для входных данных алгоритма A,
Q — предикат, принимающий истинное значение после завершения работы A. Введенные предикаты называются предусловием и постусловием соответственно.
Высказывание {P }A{Q} означает следующее: «если работа алгоритма A начинается с истинного значения предиката P , то она закончится
при истинном значении Q». Получаем, что доказательство корректности
алгоритма A равносильно доказательству истинности {P }A{Q}. Преди постусловие в совокупности с самим алгоритмом называют тройкой
Хоара5 . Тройка Хоара описывает, как выполнение данного фрагмента
компьютерной программы изменяет состояние вычисления [74].
Пример 1.14. Докажем корректность алгоритма обмена значений двух
величин:
Листинг 1.1
1
2
3
4
# Exchanging values of the variables a and b
temp = a
a = b
b = temp
5
Хоар (Charles Antony Richard Hoare) (род. 1934) — английский ученый, специализирующийся
в области информатики и вычислительной техники.
30
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
Доказательство.
Пусть переменные a и b принимают следующие значения: a = a0 ,
b = b0 .
Предусловие: P = {a = a0 , b = b0 }, постусловие: Q = {a = b0 , b =
= a0 }.
Подставим значения переменных a и b в тело алгоритма A, что приведет к следующим значениям: temp = a0 , a = b0 , b = a0 . Поэтому
предикат {P }A{Q} принимает истинное значение, тем самым доказана
корректность алгоритма swap.
1.3.
Оценка эффективности алгоритмов
Важной задачей анализа алгоритмов является оценка числа операций, выполняемых алгоритмом на определенном классе входных данных.
Точное значение количества элементарных операций здесь не играет существенной роли, так как оно зависит от программной реализации алгоритма, архитектуры компьютера и других факторов. Поэтому показателем эффективности алгоритма считается скорость роста этой величины
при возрастании объема входных данных [57, 66].
Для анализа эффективности алгоритмов необходимо оценивать время работы компьютера, решающего поставленную задачу, а также объем
используемой при этом памяти. Оценку времени работы вычислительной
системы получают обычно путем подсчета элементарных операций, выполняемых при вычислениях (такие операции называют базовыми). В
предположении, что одна элементарная операция совершается за строго
определенное время, функцию f (n), определяемую как число операций
при вычислениях на входных данных размера n, называют функцией
временно́й сложности [66].
При анализе алгоритмов оценивают число базовых операций и
принимают, что для выполнения каждой из указанных ниже операций
требуется постоянное, не зависящее от n время [67].
1. Бинарные арифметические операции (+, −, ∗, /) и операции сравнения вещественных чисел (<, , >, , =, =).
2. Логические операции (и, или).
3. Операции ветвления.
4. Вычисление значений элементарных функций при относительно
небольших значениях аргументов.
При реализации матричных алгоритмов в большинстве случаев базовой операцией считают операцию умножения двух вещественных чисел.
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
31
Обратимся к рассмотрению функций f, g : N → (0, ∞). Будем считать, что g(n) описывает временную сложность известного алгоритма.
Говорят, что функция f (n) принадлежит классу O(g(n)) (читается «о
большое от g»), если скорость роста f (n) не превышает скорость роста
g(n). Дадим строгое определение: f (n) = O(g(n)), если для всех значений аргумента n, начиная с порогового значения n = n0 , выполняется
неравенство f (n) cg(n) для некоторого положительного c:
O(g(n)) = {f (n) : ∃c > 0, n0 ∈ N такие, что для всех n n0
выполняется f (n) cg(n)}.
(1.30)
Запись f (n) ∈ O(g(n)) можно прочитать как «функция g мажорирует функцию f ».
Поскольку O(g(n)) обозначает множество функций, растущих не быстрее функции g(n), то для указания принадлежности данному множеству
используют запись f (n) ∈ O(g(n)). Нередко в литературе встречается
другое обозначение: f (n) = O(g(n)), знак равенства в котором понимается условно, а именно в смысле принадлежности множеству. На класс
O(g(n)) ссылаются как на «O-символику».
Пример 1.15. Докажите, что справедлива асимптотическая оценка
3n3 ∈ O(n4 ).
Доказательство.
Согласно определению (1.30) необходимо доказать, что существует
положительная постоянная c такая, что, начиная с некоторого номера
n0 , выполняется неравенство 3n3 cn4 или (cn − 3)n3 0.
Положим c = 3, тогда, начиная с n0 = 1, последнее неравенство
верно. Значит, 3n3 ∈ O(n4 ).
Примечание. Запись O(f (t)) используется не только при t → ∞, но
и может обобщаться на случай произвольного предельного значения аргумента t → t0 . Например, выражение
f (t) = O(g(t)) при t → t0
(1.31)
означает, что предел отношения функций f (t) и g(t) берется в точке
t = t0 :
f (t)
= const 0.
t→t0 g(t)
lim
(1.32)
32
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
1.4.
Простейшие операции с матрицами на
Python
В программах на языке Python матрицы представляются в виде двумерных массивов [27]. Для массивов в Python применяется специальный
термин — «список » (list). Список — это упорядоченная последовательность чисел или других представимых в памяти вычислительной системы объектов. Таким образом, матрица задается в виде списка, элементами которого являются списки одинаковой длины. В частности, матрица
⎡
⎤
11 13 15 17
⎢
⎥
⎥
A=⎢
(1.33)
⎣−9 −8 −7 −6⎦
−1 −2 12 14
в программе на Python будет представлена так:
A=[[11, 13, 15, 17], [-9, -8, -7, -6], [-1, -2, 12, 14]]
Как видно, для формирования списка используется перечисление его
элементов через запятую. Для обращения к элементам матрицы используются квадратные скобки, например A[i, j].
Обращаем внимание на то, что индексы массивов в Python начинаются с нуля, а не с единицы. Например, для матрицы (1.33) имеем следующие равенства:
A[0, 0] = 11
A[2, 1] = -2
Примечание. Соглашение о нулевых начальных значениях индексов
применяется также в таких языках программирования, как C и Java [60].
Однако в языках Fortran и Pascal индексы по правилу умолчания начинаются с единицы [42, 79].
Приведем программный код, используемый для ввода элементов матрицы с консоли и вывода матрицы на консоль (Листинг 1.2).
Листинг 1.2
1 def read_matrix_from_console ():
2
n = int ( input ()) # Number of rows
3
m = int ( input ()) # Number of columns
4
A = []
5
6
for i in range ( n ):
7
row = input (). split ()
8
for j in range ( m ):
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
9
row [ j ] = int ( row [ j ])
10
A . append ( row )
11
return A
12
13
14 def print_matrix_to_console (A ):
15
for row in A :
16
for elem in row :
17
print ( elem , end = ’ ’)
18
print ()
33
Пример вызова функций read_matrix_from_console() и print_matrix_to_console()
A = read_matrix_from_console()
print_matrix_to_console(A)
Следующие функции, представленные в Листинге 1.3, выполняют
стандартные операции над матрицами — сложение, умножение на число
и транспонирование.
Листинг 1.3
1 def matrix_add (A , B ):
2
if len ( A ) == len ( B ) and \
3
len ( A [0]) == len ( B [0]):
4
C = [[0 for j in range ( len ( A [0]))] \
5
for i in range ( len ( A ))]
6
7
for i in range ( len ( A )):
8
for j in range ( len ( A [0])):
9
C [ i ][ j ] = A [ i ][ j ] + B [ i ][ j ]
10
11
return C
12
13
14 def matrix_mult_by_scalar (A , alpha ):
15
C = [[0 for j in range ( len ( A [0]))] \
16
for i in range ( len ( A ))]
17
18
for i in range ( len ( A )):
19
for j in range ( len ( A [0])):
20
C [ i ][ j ] = alpha * A [ i ][ j ]
21
22
return C
34
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
23
24
25 def matrix_subtract (A , B ):
26
if len ( A ) == len ( B ) and \
27
len ( A [0]) == len ( B [0]):
28
C = [[0 for j in range ( len ( A [0]))] \
29
for i in range ( len ( A ))]
30
31
for i in range ( len ( A )):
32
for j in range ( len ( A [0])):
33
C [ i ][ j ] = A [ i ][ j ] - B [ i ][ j ]
34
35
return C
36
37
38 def matrix_transpose (A ):
39
C = [[0 for j in range ( len ( A ))] \
40
for i in range ( len ( A [0]))]
41
42
for i in range ( len ( A )):
43
for j in range ( len ( A [0])):
44
C [ j ][ i ] = A [ i ][ j ]
45
46
return C
Важная функция, вычисляющая произведение матриц по формуле (1.16), представлена в Листинге 1.4.
Листинг 1.4
1 # Multiplication of matrices A and B
2 def matrix_mult (A , B ):
3
C = [[0 for j in range ( len ( B [0]))] \
4
for i in range ( len ( A ))]
5
6
for i in range ( len ( A )):
7
for j in range ( len ( B [0])):
8
s = 0
9
10
for k in range ( len ( B )):
11
s += A [ i ][ k ] * B [ k ][ j ]
12
13
C [ i ][ j ] = s
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
14
15
1.4.1.
return C
35
Библиотека NumPy
Для высокопроизводительных вычислений широко используется библиотека с открытым исходным кодом NumPy [64, 72]. В этом пакете для
представления матриц в памяти вводится тип данных array. Кроме того,
при подключении NumPy с помощью команды
from numpy import*
становится доступным большое количество матричных функций и процедур. Важнейшие из них перечислены в таблице 1.1.
В частности, транспонирование произвольных прямоугольных матриц осуществляется с помощью метода «.T»:
A=array([[11, 13, 15, 17],[-9, -8, -7, -6],[-1, -2, 12, 14]])
A.T
На консоль (точнее, в стандартный поток вывода) будет отправлено
A=array([[11, -9, -1],
[13, -8, -2],
[15, -7, 12],
[17, -6, 14]])
1.5.
Матричные алгоритмы в теории графов
В качестве примера алгоритма работы с матрицами рассмотрим один
из важных алгоритмов теории графов — алгоритм Уоршелла6 [1, 75], который используется для вычисления матрицы достижимости заданного
ориентированного графа D(V, E).
Предварительно напомним основные понятия теории графов. Ниже
всюду знаки операций умножения «·» и «×» будем считать эквивалентными. В некоторых случаях, когда ясно, что речь идет об умножении,
они могут быть опущены.
Графом называется пара G = (V, E), где V — множество вершин,
а E — множество ребер, соединяющих некоторые пары вершин [22, 29,
31, 48]. У ориентированных графов ребра являются упорядоченной
парой вершин, т. е. имеет значение, какая вершина является началом
ребра, а какая — концом. Ориентированные графы также называют орграфами.
Рисунок, на котором вершины графа изображены точками, а ребра —
отрезками или дугами, называется диаграммой графа [21].
6
Уоршелл (Stephen Warshall) (1935–2006) — американский исследователь в области компьютерных наук.
36
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
Т а б л и ц а 1.1
Матричные функции и процедуры NumPy
Название
Комментарий
dot(A,B)
произведение матриц A и B
trace(A)
след матрицы
linalg.inv(A)
обращение матрицы
linalg.det(A)
определитель матрицы
linalg.matrix_rank(A)
ранг матрицы
linalg.matrix_power(A, n)
возведение матрицы A в целую степень n
linalg.eigvals(A)
вычисление собственных значений
матрицы
linalg.eig(A)
решение задачи на собственные
значения и собственные векторы,
функция возвращает все решения
(λ, X) системы AX = λX
linalg.solve(A, B)
решение системы линейных уравнений AX = B c вектором B в ее правой
части
Две вершины u и v графа смежны, если они соединены ребром
r = uv. При этом говорят, что вершины u и v являются концами ребра r.
Если вершина v является концом ребра r, то v и r считаются инцидентными (от латинского incēdere — распространяться).
Число элементов (мощность) любого множества, например, V , обозначается как |V |.
Матрица смежности M — это двоичная матрица отношения на
множестве вершин графа G(V, E), которое задается его ребрами. Матрица смежности имеет размер |V | × |V |, а ее элементы определяются
согласно правилу
1, если ребро ij ∈ E,
M (i, j) =
(1.34)
0, если ребро ij ∈
/ E.
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
37
Маршрутом длины k в графе G называется последовательность
вершин v0 , v1 , . . . , vk такая, что ∀i = 1, . . . , k вершины vi−1 и vi являются
смежными. Рассматривают также тривиальные маршруты вида vi , vi .
Для ориентированных графов маршруты также называют путями.
Под длиной маршрута будем понимать количество ребер в нем с
учетом повторений.
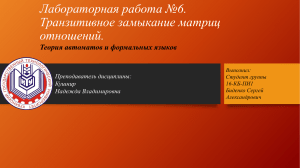
Пример 1.16. Рассмотрим орграф D(V, E), множество вершин V и
множество ребер E которого заданы следующим образом:
V = {a, b, c, d, e},
E = {ab, ae, bc, bd, dc, de, ec}.
Граф D(V, E) представлен на рис. 1.3.
c
b
a
d
e
Рис. 1.3. Орграф D(V, E) (пример 1.16)
Матрица смежности M орграфа D имеет вид:
a
b
M= c
d
e
a
⎡
0
⎢
⎢0
⎢
⎢
⎢0
⎢
⎢0
⎣
0
b c d e
⎤
1 0 0 1
⎥
0 1 1 0⎥
⎥
⎥
0 0 0 0⎥ .
⎥
0 1 0 1⎥
⎦
0 1 0 0
(1.35)
Матрицей достижимости M ∗ орграфа D(V, E) называют логическую матрицу замыкания по транзитивности отношения E. В матрице
достижимости хранится информация о существовании путей между вершинами орграфа: на пересечении i-й строки и j-го столбца стоит 1 тогда
и только тогда, когда существует путь из вершины vi в vj . Вычислить
M ∗ можно по формуле с использованием логической операции или [30]:
M ∗ = M или M 2 или . . . или M n ,
(1.36)
38
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
где n — число вершин ориентированного графа, т. е. n = |V |. Заметим,
что определение элементов матрицы M ∗ по формуле (1.36) связано с
вычислениями значительного объема, поэтому для орграфов с бо́льшим
количеством вершин используют алгоритм Уоршелла, известный также как алгоритм Роя7 – Уоршелла [75].
Алгоритм Уоршелла основан на формировании последовательности
вспомогательных двоичных матриц W (0) , W (1) , . . . , W (n) , где n = |V |.
Первую матрицу полагают равной матрице смежности M орграфа. Эле(k)
(k)
менты Wij , где 1 i, j, k n, вычисляются по правилу: Wij = 1,
если существует путь, соединяющий вершины vi и vj , такой, что все
внутренние вершины принадлежат множеству Vk = {v1 , v2 , . . . , vk }, или
(k)
Wij = 0 в противном случае. Отметим, что внутренней вершиной пути
P = vi , . . . , vl , . . . , vj называют любую вершину vl , 1 l n, принадлежащую P , за исключением первой vi и последней vj . Результирующая
матрица W (n) оказывается равной W (n) = M ∗ , поскольку Mij∗ = 1 тогда
и только тогда, когда существует путь vi , . . . , vj , все внутренние вершины
которого содержатся в V = {v1 , v2 , . . . , vn }.
Принципиальным моментом является то, что матрицу W (k) можно
получить из W (k−1) следующим образом. Путь vi , . . . , vj , содержащий
внутренние вершины только из множества Vk , существует тогда и только
тогда, когда выполняется одно из условий:
1) существует путь vi , . . . , vj с внутренними вершинами только из
Vk−1 = {v1 , v2 , . . . , vk−1 };
2) найдутся пути v1 , . . . , vk и vk , . . . , vj , содержащие внутренние вершины только из Vk−1 .
(k−1)
Получаем два случая: либо Wij
= 1, если vk входит в множество
(k−1)
(k−1)
= 1 и Wkj
= 1.
разрешенных на данном этапе вершин, либо Wik
Следовательно, с использованием логических операций или (дизъюнкции) и и (конъюнкции) можно записать:
(k)
(k−1)
Wij = Wij
(k−1)
(k−1) или Wik
и Wkj
.
(1.37)
Приведем соответствующий алгоритм для построения M ∗ по заданной матрице смежности M размера n × n, где n > 1. Промежуточные
матрицы W (k) , где 0 k n − 1, не обязательно хранить в памяти до
окончания работы алгоритма, поэтому в предлагаемой реализации элементы W (k−1) заменяются элементами последующей матрицы W (k) .
7
Рой (Bernard Roy) (род. 1934) — французский математик.
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
39
Листинг 1.5
1 def Warshall_algorithm (M ):
2
n = len ( M )
3
4
W = [[0 for j in range ( n )] \
5
for i in range ( n )]
6
7
for i in range ( n ):
8
for j in range ( n ):
9
W [ i ][ j ] = M [ i ][ j ]
10
11
for k in range ( n ):
12
for i in range ( n ):
13
for j in range ( n ):
14
W [ i ][ j ] = W [ i ][ j ] or \
15
( W [ i ][ k ] and W [ k ][ j ])
16
17
return W
a
b
d
c
Рис. 1.4. Ориентированный граф D
Корректность алгоритма WarshallAlgo можно доказать методом математической индукции (см. описание этого метода далее п. 2.5.1) [75].
Решение задачи о нахождении M ∗ исследуется также в упражнении 1.39
и в [75].
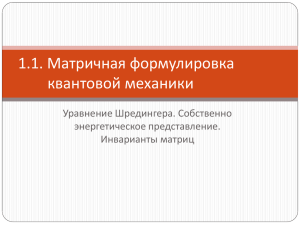
Пример 1.17. Пусть задан орграф D (рис. 1.4). Построим матрицу
достижимости M ∗ , воспользовавшись алгоритмом Уоршелла.
40
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
Решение.
Матрица W (0) совпадает с матрицей смежности орграфа и имеет вид
a
W (0) =
b
c
d
a
⎡
0
⎢
⎢1
⎢
⎢0
⎣
1
b c d
⎤
1 0 0
⎥
0 1 0⎥
⎥.
0 0 0⎥
⎦
0 1 0
(0)
(1)
Вычислим W (1) . Если Wij = 1, то соответствующий элемент Wij
(1)
(0)
также равен 1: Wij = 1. Если Wij = 0, то следует обратить внимание
на элементы первой строки и первого столбца, стоящие на пересечении
(0)
(0)
(1)
с j-м столбцом и i-й строкой: если W1j = Wi1 = 1, то Wij = 1. Усло(0)
(0)
вие W1j = Wi1 = 1 выполняется для двух пар (i, j), а именно для
(1)
(1)
i = j = 2 и i = 4, j = 2. Значит, W22 = W42 = 1, а все остальные элементы W (1) совпадают с соответствующими элементами матрицы W (0) .
Для наглядности в записи матрицы выделим полужирным шрифтом и
подчеркиванием элементы W (1) , изменившие значение на данном шаге:
a
W (1) =
b
c
d
a
⎡
0
⎢
⎢1
⎢
⎢0
⎣
1
b c d
⎤
1 0 0
⎥
1 1 0⎥
⎥.
0 0 0⎥
⎦
1 1 0
Далее вычислим W (2) . Рассмотрим вторую строку и второй столбец
матрицы W (1) . Те элементы W (1) , которые расположены в одной строке с
(1)
элементами Wi2 = 1 из второго столбца и в одном столбце с элементами
(1)
W2j = 1 из второй строки, изменят свое значение в W (1) на 1. Таки(1)
(1)
ми будут элементы W11 и W13 . Остальные элементы W (2) совпадают с
соответствующими элементами матрицы W (1) .
a
W (2) =
b
c
d
a
⎡
1
⎢
⎢1
⎢
⎢0
⎣
1
b c d
⎤
1 1 0
⎥
1 1 0⎥
⎥.
0 0 0⎥
⎦
1 1 0
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
41
На следующем шаге к множеству возможных вершин добавляется
вершина c. Это не приводит к появлению новых элементов со значением
1.
a b c d
⎡
⎤
a 1 1 1 0
⎢
⎥
b ⎢
1 1 1 0⎥
(3)
⎢
⎥.
W =
⎥
c ⎢
0
0
0
0
⎣
⎦
d 1 1 1 0
На заключительном шаге получаем W (4) = W (3) , и матрица достижимости орграфа D будет иметь вид
a b c d
⎡
⎤
a 1 1 1 0
⎢
⎥
b ⎢
1 1 1 0⎥
∗
⎢
⎥.
M =
⎥
c ⎢
0
0
0
0
⎣
⎦
d 1 1 1 0
Контрольные вопросы к главе «Матрицы и
матричные алгоритмы»
1. Дайте определение диагональной матрицы, верхней треугольной
матрицы, нижней треугольной матрицы, симметричной матрицы,
двоичной матрицы.
2. Каким образом выполняется операция транспонирования матрицы?
3. Как определяется символ Кронекера?
4. Какие матрицы называются симметричными, антисимметричными?
5. Сформулируйте определение произведения двух матриц размера
m × n и n × p.
6. Чему равен коммутатор матриц A и B?
7. Дайте определение следа квадратной матрицы.
42
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
8. Что такое алгоритм?
9. Перечислите основные свойства алгоритмов.
10. Как оценивают эффективность алгоритмов?
11. Поясните смысл обозначения O(f (n)).
12. Опишите, как представляются матрицы в Python.
13. Перечислите основные матричные функции и процедуры библиотеки NumPy.
14. Какими способами представляются графы в памяти компьютера?
15. Для решения какой задачи используют алгоритм Уоршелла?
Задачи для самостоятельного решения
1.1. Вычислите 3A + 2B, где A =
2 1 −1
, B=
−2 1 0
.
−3 2 2
⎡
⎤
1 1
⎢
⎥
1 −1 0
⎢
1.2. Вычислите AB, где A =
, B = ⎣2 −1⎥
⎦. Найдите
2 3 4
3 0
B T AT и (A B)T .
0 1
4
1.3. Пусть матрица A = (aij ) имеет размер n1 × n2 , а матрица B =
= (bij ) — размер n2 × n3 . Докажите, что выполняется равенство
(AB)T = B T AT ,
(1.38)
т. е. транспонированное произведение двух матриц равно произведению транспонированных матриц, взятых в обратном порядке.
1.4. Выпишите матрицы размера 3×3, элементы которых определяются
по формулам:
1) aij = (−1)i+j−1 ;
i + j + |i − j|
;
2
3) cij = (i − 2)2 + (j − 2)2 ;
2) bij =
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
43
4) dij = sin(|i − j|).
Вычислите сумму всех элементов S каждой из матриц.
1.5. Пусть A = (aij ) — квадратная матрица
порядка n 3. Воспользовавшись символом суммирования , запишите следующие величины:
1) сумму элементов третьей строки;
2) сумму элементов второго столбца;
3) сумму квадратов диагональных элементов;
4) модуль суммы элементов, расположенных на побочной диагонали.
1.6. Как с помощью знака суммирования записать сумму элементов
квадратной матрицы, расположенных выше главной диагонали?
Как это сделать для элементов, расположенных ниже главной диагонали?
1.7. Студент, проводящий опыт в химической лаборатории, случайно
залил реактивом страницу конспекта по алгебре, на которой была записана антисимметричная матрица. В результате оказалось
невозможным прочитать некоторые ее элементы. Если обозначить
такие элементы символом «?», то запись будет выглядеть так:
⎡
⎤
0 1 −1 ?
⎢
⎥
⎢? 0 2 2⎥
⎢
⎥
⎢? ? ? ?⎥ .
⎣
⎦
7 ? 0 ?
Восстановите неизвестные элементы и запишите исходную матрицу.
1.8. Определите число двоичных квадратных матриц из n строк и n
столбцов, являющихся
1) симметричными;
2) антисимметричными
относительно главной диагонали.
44
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
1.9. Вычислите:
⎡
⎤
⎤
0 0 1 ⎡
⎢
⎥ −1 −1 ⎢1 1 2⎥ ⎢
⎥
⎥⎢ 2 2 ⎥ 4 ;
а) ⎢
⎢2 2 3⎥ ⎣
⎦ 1
⎣
⎦
1 1
3 3 4
1.10. Рассмотрим двоичные матрицы
⎡
⎤
0 1 0
⎢
⎥
⎥
Q1 = ⎢
⎣1 0 0⎦ ,
0 0 1
б)
3
1 −2
3 −4
⎡
.
⎤
0 0 1
⎢
⎥
⎥
Q2 = ⎢
⎣0 1 0⎦ .
1 0 0
Выполните действия: Q1 Q2 , Q2 Q1 , Q21 и Q22 .
1.11. Для каких матриц D второго порядка квадрат D2 равен нулевой
матрице?
1.12. Пусть заданы матрицы L = [−2, −1, 0, 1, 2], M = [0, 2, 4, 6, 8]. Вычислите произведения LM T и M T L.
1.13. Элементы матрицы G = (gij ) определены согласно правилу
1, если i j,
gij =
0, если i < j.
Чему равны элементы матрицы G2 ?
1.14. На экзамене по линейной алгебре студент утверждает, что в результате перемножения двух ненулевых матриц результат обязательно
будет ненулевой матрицей. Прав ли студент?
∗ 1.15. Обозначим через xi количество процессоров, выпущенных некоторым предприятием, считая от начала года. В частности, работа
предприятия в первый месяц описывается вектором X = [x1 , x2 , . . . ,
x31 ]T . Определите матрицу D, которой следует подействовать на
X, чтобы в результате получить вектор Y = [x2 − x1 , x3 − x2 , . . . ,
xn − xn−1 ]T : Y = D · X. Вектор Y отражает ежедневный прирост
производительных мощностей предприятия.
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
45
1.16. Вычислите произведение функциональных матриц A(ψ)B(θ)A(ϕ),
если
⎡
⎤
⎡
⎤
cos ϕ sin ϕ 0
1
0
0
⎢
⎥
⎢
⎥
⎥
⎢
⎥
A(ϕ) = ⎢
⎣− sin ϕ cos ϕ 0⎦ , B(θ) = ⎣0 cos θ sin θ ⎦ .
0
0
1.17. Вычислите коммутатор
⎡
⎤
⎡
7 5 3
6
⎢
⎥
⎢
⎥
⎢
A=⎢
⎣1 3 2⎦ , B = ⎣ 5
2 2 7
1
1
0 − sin θ cos θ
[A, B], если
⎤
2 3
⎥
2 1⎥
⎦.
1 6
1.18. Вычислите коммутатор [A, B], если A — произвольная матрица,
B = I — единичная матрица того же порядка, что и A.
1.19. Рассмотрим матрицы
⎡
⎡
⎤
⎤
0 −1 0
0 0 0
⎢
⎢
⎥
⎥
⎢
⎢
⎥
P1 = ⎣1 0 0⎦ , P2 = ⎣0 0 −1⎥
⎦,
0 0 0
0 1 0
⎡
⎤
0 0 1
⎢
⎥
⎢
P3 = ⎣ 0 0 0 ⎥
⎦ . (1.39)
−1 0 0
Вычислите коммутаторы [P1 , P2 ], [P2 , P3 ] и [P3 , P1 ].
1.20. Верно ли, что для любых квадратных матриц A, B и C одинакового
размера выполняется равенство [A + B, C] = [A, C] + [B, C]?
1.21. Докажите, что для любых матриц A, B и C одинакового размера
справедливо тождество
[AB, C] ≡ A[B, C] + [A, C]B.
(1.40)
1.22. Верно ли, что для любых квадратных матриц A, B и C одинакового
размера выполняется равенство [A, [B, C]] = [[A, B], C]?
1.23. Пусть даны квадратные матрицы A и B одного и того же порядка.
В каком случае справедливо равенство (A + B)2 = A2 + 2AB + B 2 ?
1.24. Верно ли, что если [A, B] = O и [A, C] = O, то матрицы B и C
являются коммутирующими?
46
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
1.25. Предположим, что размеры матриц A, B и C равны n1 ×n2 , n2 ×n3
и n3 × n4 соответственно. Чтобы вычислить произведение ABC,
операции умножения можно выполнить двумя способами: (A·B)·C
или A · (B · C). При каком соотношении между величинами n1 , n2 ,
n3 и n4 вычисление первым способом — как (A · B) · C — потребует
меньшего количества операций умножения вещественных чисел по
сравнению со вторым способом?
1.26. Докажите корректность алгоритма обмена значений двух величин
без использования вспомогательной переменной.
1
2
3
4
5
#
#
a
b
a
Листинг 1.6
Exchanging values of the variables a and b
without using the auxiliary variable
= a + b
= a - b
= a - b
1.27. Докажите корректность алгоритма сложения квадратных матриц.
Листинг 1.7
1 # Addition of matrices A and B
2 def matrix_add (A , B ):
3
if len ( A ) == len ( B ) and \
4
len ( A [0]) == len ( B [0]):
5
C = [[0 for j in range ( len ( A [0]))] \
6
for i in range ( len ( A ))]
7
8
for i in range ( len ( A )):
9
for j in range ( len ( A [0])):
10
C [ i ][ j ] = A [ i ][ j ] + B [ i ][ j ]
11
12
return C
1.28. Докажите корректность алгоритма умножения квадратных матриц.
Листинг 1.8
1 # Multiplication of matrices A and B
2 def matrix_mult (A , B ):
3
C = [[0 for j in range ( len ( B [0]))] \
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
4
5
6
7
8
9
10
11
12
13
14
15
47
for i in range ( len ( A ))]
for i in range ( len ( A )):
for j in range ( len ( B [0])):
s = 0
for k in range ( len ( B )):
s += A [ i ][ k ] * B [ k ][ j ]
C [ i ][ j ] = s
return C
1.29. Докажите корректность оптимизированного алгоритма умножения
матриц.
1 # Optimized multiplication
2 # of matrices A and B
3 def matrix_mult2 (A , B ):
4
n = len ( A )
5
6
C = [[0 for i in range ( n )] \
7
for j in range ( n )]
8
9
D = [0 for i in range ( n )]
10
11
for i in range ( n ):
12
for j in range ( n ):
13
s = 0
14
15
for k in range ( n ):
16
D [ k ] = B [ k ][ j ]
17
18
for k in range ( n ):
19
s += A [ i ][ k ] * D [ k ]
20
21
C [ i ][ j ] = s
22
23
return C
Листинг 1.9
48
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
Примечание. Рассмотренный вариант умножения матриц оптимизирован таким образом, чтобы предварительно выбирать элементы
столбца B[k, j] в промежуточный массив D, который можно целиком разместить в быстрой кэш-памяти [3].
1.30. Определите количество операций сложения двух чисел, выполняемых алгоритмом matrix_add(A, B) для матриц размера N × N .
1.31. Определите количество операций сложения и умножения, выполняемых алгоритмом matrix_mult(A, B) для матриц размера N ×N .
1.32. Предложите способ уменьшить число операций сложения, выполняемых алгоритмом matrix_mult(A, B).
1.33. Пусть A1 , A2 и A3 — числовые матрицы размера 50 × 25, 25 × 30 и
30 × 10 соответственно. Определите минимальное число операций
умножения, необходимых для вычисления произведения A1 A2 A3
стандартным алгоритмом matrix_mult, реализация которого для
квадратных матриц представлена в упражнении 1.28.
1.34. Пусть A1 , A2 , A3 и A4 — числовые матрицы размера 25×10, 10×50,
50 × 5 и 5 × 30 соответственно. Определите минимальное число
операций умножения, необходимых для вычисления произведения
A1 A2 A3 A4 стандартным алгоритмом matrix_mult.
1.35. Пусть A1 , A2 , A3 и A4 — числовые матрицы размера 100×20, 20×15,
15 × 50 и 50 × 100 соответственно. Определите минимальное число
операций умножения, необходимых для вычисления произведения
A1 A2 A3 A4 стандартным алгоритмом matrix_mult.
∗ 1.36. Докажите, что число способов вычисления произведения матриц
A1 A2 . . . Am+1 , m 1, или, другими словами, число способов расстановки скобок в данном произведении, где A1 , A2 , . . . , Am+1 —
числовые матрицы размера n1 × n2 , n2 × n3 , . . . , nm+1 × nm+2 соответственно, равно числу Каталана8 Cm , определяемому по формуле
Cm =
1
C(2m, m) для всех m 1,
m+1
(1.41)
где C(2m, m) — биномиальный коэффициент.
1.37. Оцените число операций, совершаемых алгоритмом Уоршелла для
получения матрицы достижимости орграфа.
8
Каталан (Eugène Charles Catalan) (1814–1894) — бельгийский математик.
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
49
1.38. С помощью алгоритма Уоршелла вычислите матрицу достижимости орграфа D, представленного на рис. 1.5.
3
2
4
1
5
Рис. 1.5. К упр. 1.38
1.39. Один из путей модификации алгоритма Уоршелла заключается в
представлении строк двоичных матриц как битовых строк. В этом
случае для вычисления элементов матриц W (k) для 1 i N
используется побитовая операция or. Определите число операций
на битовых строках, совершаемых данной реализацией алгоритма
Уоршелла.
1.40. Запишите аналитическое выражение для функции f (N ), представленной алгоритмом:
Листинг 1.10
1 def f ( n : int ):
2
temp = 0
3
4
for i in range (1 , n + 1):
5
for j in range (1 , n + 1):
6
for k in range (j , n + 1):
7
temp += 1
8
9
return temp
∗ 1.41. Запишите аналитическое выражение для функции g(N ), представленной алгоритмом:
50
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
Листинг 1.11
1 def g ( n : int ):
2
temp = 0
3
4
for i in range (1 , n + 1):
5
for j in range (n , i - 1 , -1):
6
for k in range (1 , j + 1):
7
temp += 1
8
9
return temp
∗ 1.42. Запишите аналитическое выражение для функции h(N ), представленной алгоритмом:
Листинг 1.12
1 def h ( n : int ):
2
temp = 0
3
4
for i in range (1 , n + 1):
5
for j in range (1 , i + 1):
6
for k in range (1 , j + 1):
7
for l in range (1 , k + 1):
8
temp += 1
9
10
return temp
1.43. Вычислите след матрицы A = (aij ), где 1 i, j n, элементы
которой заданы формулами:
1) aij = i + j;
2) aij = i − j;
3) aij = ln(i2 + j 2 );
4) aij = max(i, n − j);
1 1
5) aij = min( , );
i j
6) aij = sin(π(i + 2j));
n
7) aij = − (i + j);
2
1
8) aij = i + .
j
Powered by TCPDF (www.tcpdf.org)
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
51
1.44. Докажите, что след произведения квадратных матриц не зависит
от порядка сомножителей: tr (AB) = tr (BA).
Ответы и решения к главе «Матрицы и матричные алгоритмы»
1.1. Решение.
6 3 −3
−4
Вычисляем слагаемые в сумме: 3A =
, 2B =
0 3 12
−6
2
Выполняем операцию суммирования матриц: 3A+2B =
−6
2 0
.
5 −3
4 4
7 16
.
1.2. Решение.
Произведение AB вычислим,
⎡
⎤ опираясь на формулу (1.16):
1 1
⎥
1 −1 0 ⎢
⎢2 −1⎥ =
A·B =
⎣
⎦
2 3 4
3 0
1 · 1 + (−1) · 2 + 0 · 3 1 · 1 + (−1) · (−1) + 0 · 0
−1 2
=
=
.
2·1+3·2+4·3
2 · 1 + 3 · (−1) + 4 · 0
20 −1
транспонирования матриц:
операцию
Выполняем
⎡
⎤
1 2
⎢
⎥ T
1
2
3
T
⎥
A =⎢
⎣−1 3⎦ , B = 1 −1 0 ;
0 4
1
·
1
+
2
·
(−1)
+
3
·
0
1
·
2
+
2
·
3
+
3
·
4
B T · AT =
=
1 · 1 + (−1) · (−1) + 0 · 0 1 · 2 + (−1) · 3 + 0 · 4
−1 20
=
.
2 −1
−1
20
.
(A · B)T =
2 −1
Заметим, что равенство (A B)T = B T AT выполняется для любых
матриц A и B, для которых определено произведение AB (см. упр. 1.38).
52
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
1.3. Доказательство.
На основании определения операции транспонирования матрицы и
формулы (1.16) левая часть равенства (1.38) состоит из элементов:
(AB)T
ij
= (AB)ji =
n2
ajk bki ,
k=1
где 1 i n3 , 1 j n1 .
Далее, представим элементы правой части равенства (1.38) в виде
(B T AT )ij =
n2
(B T )ik (AT )kj =
k=1
n2
bki ajk =
k=1
n2
ajk bki
k=1
для 1 i n3 , 1 j n1 .
Доказано, что для всех возможных номеров i и j элементы матриц
(AB)T и B T AT совпадают. В соответствии с определением равенства матриц на с. 21 получаем:
(AB)T = B T AT .
1.4. Решение.
Вычислив
элементы
⎡
⎤ матриц по указанным формулам, получим:
−1 1 −1
⎢
⎥
⎢
1) ⎣ 1 −1 1 ⎥
⎦, сумма всех элементов S = −1;
⎡
−1
1
⎢
2) ⎢
⎣2
3
⎡
2
⎢
⎢
3) ⎣1
2
⎡
1
⎤
−1
2 3
⎥
2 3⎥
⎦, S = 22;
3 3
⎤
1 2
⎥
0 1⎥
⎦, S = 12;
1 2
⎤
0 sin 1 sin 2
⎢
⎥
⎥
4) ⎢
⎣sin 1 0 sin 1⎦, S = 4 sin 1 + 2 sin 2.
sin 2 sin 1
0
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
53
1.5. Решение.
1) Для элементов третьей строки имеем i = 3, j = 1, 2, . . . , n. Следоn
a3j .
вательно, сумма элементов третьей строки представляется в виде
j=1
2) Элементы второго столбца могут быть записаны как ai2 , где i =
n
ai2 .
= 1, 2, . . . , n. Значит, их сумма равна
i=1
3) У диагональных элементов индексы i и j совпадают: aii . Суммa
n
a2ii .
квадратов таких элементов равна
i=1
4) Побочную диагональ составляют элементы, у которых сумма индексов на единицу больше порядка матрицы: i+j = n+1. Следовательно,
n
ai(n+1−i) .
j = (n + 1) − i, и модуль суммы этих элементов равен abs
i=1
1.6. Решение.
Запишем сумму элементов квадратной матрицы, расположенных выше главной диагонали. Количество подлежащих суммированию элементов в строках выше главной диагонали уменьшается на единицу с увеличением номера строки. В силу этого суммирование элементов в i-й строке
n
aij . Выначинается с i + 1, тогда сумма в одной строке будет равна
полняя операцию суммирования по всем строкам, получим
j=i+1
n
n i=1 j=i+1
aij .
Теперь запишем сумму элементов, расположенных ниже главной диагонали. Количество подлежащих суммированию элементов ниже главной
диагонали возрастает на единицу с увеличением номера строки. Значит,
верхний предел суммирования должен быть равен i−1, и сумма по одной
i−1
aij . Для суммы элементов, расположенных
строке вычисляется как
j=1
ниже главной диагонали, получаем
n i−1
i=1 j=1
1.7. Решение.
По определению
⎡
0 a21
⎢
⎢1 0
AT = ⎢
⎢−1 2
⎣
a14 2
aij .
антисимметричной матрицы AT = −A, тогда
⎤
⎡
⎤
a31 7
0
−1
1 −a14
⎥
⎢
⎥
⎢
−2 −2 ⎥
a32 a42 ⎥
⎥ , −A = ⎢−a21 0
⎥
⎢−a −a −a −a ⎥ .
a33 0 ⎥
32
33
34 ⎦
⎦
⎣ 31
a34 a44
−7 −a42 0 −a44
54
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
Приравнивая соответствующие элементы матриц, получаем:
⎡
⎤
0 1 −1 −7
⎢
⎥
⎢−1 0 2 2 ⎥
⎥
A=⎢
⎢ 1 −2 0 0 ⎥ .
⎣
⎦
7 −2 0 0
1.8. Решение.
Прежде всего заметим, что количество элементов на главной диагонали матрицы равно n, в то время как количество элементов, лежащих
выше нее, равно n(n − 1)/2.
1) Элементы симметричной матрицы, лежащие ниже главной диагонали, однозначно определяются верхней треугольной частью матрицы,
это можно сделать 2n(n−1)/2 способами. Для выбора диагональных элементов существует 2n способов. Получаем, что количество симметричных матриц из n строк и n столбцов равно 2n(n−1)/2 · 2n = 2n(n+1)/2 .
2) Главная диагональ антисимметричной матрицы заполнена нулями. Для определения такой матрицы достаточно задать элементы выше
главной диагонали, это можно сделать 2n(n−1)/2 способами. Следовательно, всего существует 2n(n−1)/2 антисимметричных матриц размера n × n.
1.9. Решение.
⎡
0 0
⎢
⎢1 1
а) ⎢
⎢2 2
⎣
3 3
б)
3
1 −2
3 −4
=
⎤
⎡
⎤
1 ⎡
1
⎥ −1 −1 ⎢
⎢
⎥
⎢
2⎥
⎥ ⎢ 2 2 ⎥ 4 = ⎢3
⎥
⎢5
⎣
⎦
3⎦
1
⎣
1 1
4
7
1 −2 1 −2 1 −2
3 −4
3 −4
3 −4
=
1.10. Решение.
⎡
⎤⎡
⎤ ⎡
⎤
0 1 0
0 0 1
0 1 0
⎢
⎥⎢
⎥ ⎢
⎥
⎢
⎥
⎢
⎥
⎢
Q 1 Q2 = ⎣ 1 0 0 ⎦ ⎣ 0 1 0 ⎦ = ⎣ 0 0 1 ⎥
⎦;
0 0 1
1 0 0
1 0 0
⎤
⎡ ⎤
5
⎥ ⎢ ⎥
⎢ ⎥
3⎥
⎥ 4 = ⎢15⎥ ;
⎥
⎢25⎥
5⎦ 1
⎣ ⎦
7
35
1
−5 6
1 −2
−9 10
=
3 −4
13 −14
=
.
21 −22
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
⎡
⎤⎡
0 0 1
⎤
⎡
0 1 0
55
⎤
0 0 1
⎢
⎥⎢
⎥ ⎢
⎥
⎥ ⎢1 0 0⎥ = ⎢1 0 0⎥ ;
Q2 Q1 = ⎢
0
1
0
⎣
⎦⎣
⎦ ⎣
⎦
1 0 0
0 0 1
0 1 0
⎡
⎤⎡
0 1 0
⎤
⎡
0 1 0
⎤
1 0 0
⎢
⎥⎢
⎥ ⎢
⎥
⎥⎢
⎥ ⎢
⎥
Q21 = ⎢
⎣1 0 0⎦ ⎣1 0 0⎦ = ⎣0 1 0⎦ ;
0 0 1
0 0 1
0 0 1
⎡
⎤⎡
0 0 1
⎤
0 0 1
⎡
⎤
1 0 0
⎢
⎥⎢
⎥ ⎢
⎥
⎥⎢
⎥ ⎢
⎥
Q22 = ⎢
⎣0 1 0⎦ ⎣0 1 0⎦ = ⎣0 1 0⎦ .
1 0 0
1 0 0
0 0 1
1.11. Решение.
Пусть матрица D имеет вид
a b
c d
, где a, b, c, d — неизвестные веще-
ственные числа.
Возведем D в квадрат и приравняем полученный результат нулевой
матрице:
0 0
a b a b
a2 + bc ab + bd
=
.
=
ac + dc bc + d2
0 0
c d c d
Запишем систему относительно неизвестных a, b, c, d:
⎧
⎪
a2 + bc = 0,
⎪
⎪
⎪
⎨ c(a + d) = 0,
⎪
b(a + d) = 0,
⎪
⎪
⎪
⎩
bc + d2 = 0.
системы следует, что матрица D должна иметь вид
Из полученной
a b
, причем величины a, b и c связаны условием a2 + bc = 0.
c −a
1.12. Ответ.
Размер матрицы L равен 1 × 5, размер матрицы M T равен 5 × 1.
Следовательно, матрицы LM T и M T L имеют размеры 1 × 1 (это скаляр)
56
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
и 5 × 5, соответственно. Выполнив операции умножения, получим:
⎡ ⎤
0
⎢ ⎥
⎢2⎥
⎢ ⎥
⎢ ⎥
LM T = [−2, −1, 0, 1, 2] ⎢4⎥ = (−2) · 0 + (−1) · 2 + 0 · 4 + 1 · 6 + 2 · 8 = 20;
⎢ ⎥
⎢6⎥
⎣ ⎦
8
⎡ ⎤
⎡
0
0
⎢ ⎥
⎢
⎢2⎥
⎢ −4
⎢ ⎥
⎢
⎢
⎥
⎢
M T L = ⎢4⎥ [−2, −1, 0, 1, 2] = ⎢ −8
⎢ ⎥
⎢
⎢6⎥
⎢−12
⎣ ⎦
⎣
8
−16
1.13. Ответ.
Пусть H = G2 , тогда
hij =
⎤
0
0 0 0
⎥
−2 0 2 4 ⎥
⎥
⎥
−4 0 4 8 ⎥ .
⎥
−6 0 6 12⎥
⎦
−8 0 8 16
i − j + 1, если i j,
0, если i < j.
1.14. Решение.
t 0
0 0
Пусть A =
,B=
, где t ∈ R.
0 0
t 0
Как легко видеть, здесь выполняется равенство AB = O, следовательно, произведение двух ненулевых матриц может быть равно нулевой
матрице. Студент не прав.
1.16. Решение.
⎡
⎤⎡
⎤
sin ψ 0 1
0
0
⎢
⎥⎢
⎥
⎥⎢
⎥
A(ψ)B(θ) = ⎢
⎣− sin ψ cos ψ 0⎦ ⎣0 cos θ sin θ ⎦ =
0
0
1
0 − sin θ cos θ
⎤
⎡
cos ψ sin ψ cos θ sin ψ sin θ
⎥
⎢
⎥.
=⎢
−
sin
ψ
cos
ψ
cos
θ
cos
ψ
sin
θ
⎦
⎣
0
− sin θ
cos θ
cos ψ
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
57
A(ψ)B(θ)A(ϕ) =
⎡
⎤⎡
⎤
cos ψ sin ψ cos θ sin ψ sin θ
cos ϕ sin ϕ 0
⎢
⎥⎢
⎥
⎥⎢
⎥
=⎢
⎣− sin ψ cos ψ cos θ cos ψ sin θ⎦ ⎣− sin ϕ cos ϕ 0⎦ =
0
− sin θ
cos θ
0
0
1
⎡
cos ψ cos ϕ − sin ψ cos θ sin ϕ
cos ψ sin ϕ + sin ψ cos θ cos ϕ
sin ψ sin θ
sin θ sin ϕ
− sin θ cos ϕ
cos θ
⎤
=⎣− sin ψ cos ϕ − cos ψ cos θ sin ϕ − sin ψ sin ϕ + cos ψ cos θ cos ϕ cos ψ sin θ⎦ .
1.17. Решение.
⎡
⎤
7 5 3
⎢
⎥
⎥
AB = ⎢
⎣1 3 2⎦
⎡
⎤
6 2 3
⎢
⎢5
⎣
1
⎡
7
⎢
⎢1
⎣
2
⎡
⎤
70 27 44
⎥ ⎢
⎢
2 1⎥
⎦ = ⎣23
2 2 7
1 6
29
⎡
⎤
⎤ ⎡
6 2 3
5 3
50
⎢
⎥
⎥ ⎢
⎥
⎢
BA = ⎢
3 2⎥
⎣5 2 1⎦
⎦ = ⎣39
1 1 6
2 7
20
⎡
20 −15
⎢
⎢
[A, B] = AB − BA = ⎣−16 −23
9
−5
⎥
10 18⎥
⎦,
15 50
⎤
42 43
⎥
33 26⎥
⎦,
20 47
⎤
1
⎥
−8⎥
⎦.
3
1.18. Ответ: [A, I] = O.
1.19. Ответ:
[P1 , P2 ] = P3 , [P2 , P3 ] = P1 и [P3 , P1 ] = P2 .
1.20. Ответ:
Да, равенство [A + B, C] = [A, C] + [B, C] справедливо для любых
квадратных матриц A, B и C одинакового размера. Простые вычисления
показывают, что
[(A+B), C] = (A+B)C−C(A+B) = AC−CA+BC−CB = [A, C]+[B, C].
58
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
1.21. Доказательство.
Преобразуем правую часть равенства (1.40), опираясь на определение (1.20):
A[B, C] + [A, C]B = A(BC − CB) + (AC − CA)B.
Далее раскроем скобки и приведем подобные слагаемые, после чего еще
раз воспользуемся определением коммутатора:
A[B, C]+[A, C]B = ABC−ACB+ACB−CAB = ABC−CAB = [AB, C].
Таким образом, тождество (1.40) доказано.
1.22. Решение.
Нет, равенство [A, [B, C]] = [[A, B], C] выполняется не для всех A, B
и C, как показывает следующий контрпример:
1 0
0 1
0 0
A=
, B=
, C=
,
0 0
0 0
1 0
0 0
1 0
[A, [B, C]] =
, [[A, B], C] =
.
0 0
0 −1
Следовательно, для прозвольных матриц [A, [B, C]] = [[A, B], C].
1.23. Ответ: равенство справедливо в случае AB = BA, т. е. если
матрицы являются коммутирующими.
1.24. Решение.
Не верно. К высказыванию из условия задачи можно привести следующий контрпример:
1 0
1 0
0 1
A=
, B=
, C=
.
0 1
0 −1
1 0
В этом случае выполняются равенства [A, B] = [A, C] = O, в то время
как
1 0
0 1
0 1 1 0
0 −2
[B, C] =
−
=
= O.
0 −1 1 0
1 0 0 −1
−2 0
Следовательно, матрицы B и C не обязательно являются коммутирующими.
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
59
1.25. Решение.
Вычислим количество операций умножения для каждого из двух способов.
1) При умножении каждой строки матрицы A на каждый столбец
матрицы B производится n2 операций умножения. Так, если число строк
равно n1 , а число столбцов — n3 , то в итоге получим n1 n2 n3 операций.
Матрица AB имеет размер n1 × n3 , тогда для получения матрицы ABC
из AB и C необходимо n1 n3 n4 операций умножения вещественных чисел. Таким образом, вычисление (AB)C требует n1 n3 (n2 + n4 ) операций
умножения.
2) Рассуждая аналогично, получим n2 n4 (n1 + n3 ) операций умножения, необходимых для вычисления по схеме A(BC).
В итоге, вычисление первым способом — как (AB)C — потребует
меньшего количества операций умножения вещественных чисел при выполнении условия n1 n3 (n2 + n4 ) < n2 n4 (n1 + n3 ).
1.30. Ответ: для вычисления суммы двух матриц A и B потребуются N 2 сложений для определения каждого из N 2 элементов A + B.
1.31. Решение.
Каждый из N 2 элементов матрицы AB вычисляется как скалярное
произведение двух векторов размера N , что, соответственно, требует
N сложений и N умножений. Общее число как сложений, так и умножений получается равным N · N 2 = N 3 .
1.32. Решение.
Тело цикла по переменной k можно переписать в следующем виде:
C[i][j] = A[i][0] * B[0][j]
for k in range(1, len(B)):
C[i][j] = C[i][j] + A[i][k] * B[k][j]
Тогда число сложений уменьшится до N 3 − N 2 , а число умножений
не изменится.
1.33. Решение.
Как известно, число операций умножения, необходимых для вычисления произведения матриц размера n1 × n2 и n2 × n3 , равно n1 n2 n3 .
(Напомним, что произведение двух матриц определено, если количество
столбцов первой из них совпадает с количеством строк второй.) В силу
ассоциативности операции умножения произведение A1 A2 A3 может быть
вычислено двумя способами: (A1 A2 )A3 и A1 (A2 A3 ).
60
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
В первом случае потребуется 50·25·30+50·30·10 = 52 500 умножений,
во втором — 25 · 30 · 10 + 50 · 25 · 10 = 20 000. Итак, минимальное число
операций умножения, необходимых для вычисления элементов матрицы
A1 A2 A3 стандартным алгоритмом, равно 20 000.
Примечание. Существует эффективный алгоритм [57] определения
порядка умножений в произведении A1 A2 . . . An , n > 2, с минимальным
числом операций.
1.34. Ответ: 7 500.
1.35. Ответ: 255 000.
1.37. Решение.
Для вычисления W [i, k] в строках с номерами 14–15 (см. алгоритм
на с. 39) требуются две логические операции. Поскольку данная строка
выполняется N × N × N = N 3 раз, где N — размер матрицы смежности
орграфа, то полное число операций для получения M ∗ равно 2N 3 .
1.38. Ответ:
⎡
⎤
0 1 1 1 1
⎢
⎢0
⎢
⎢
M ∗ = ⎢0
⎢
⎢0
⎣
0
⎥
1 1 1 0⎥
⎥
⎥
1 1 1 0⎥ .
⎥
1 1 1 0⎥
⎦
1 1 1 0
N 2 (N + 1)
.
2
1
1.41. Ответ: g(N ) = (N (N + 1)(2N + 1)).
6
1
1.42. Ответ: h(N ) = (N (N + 1)(N + 2)(N + 3)).
24
1.40. Ответ: f (N ) =
1.43. Ответ:
1) tr A = n(n + 1);
2) tr A = 0;
n
i — факториал числа n;
3) tr A = n ln 2 + 2 ln(n!), где n! =
i=1
3k 2 ,
если n = 2k,
где k ∈ N;
4) tr A =
2
3k + 3k + 1, если n = 2k + 1,
ГЛАВА 1. МАТРИЦЫ И МАТРИЧНЫЕ АЛГОРИТМЫ
5) tr A = Hn , где Hn =
6) tr A = 0;
61
n 1
— гармоническое число;
i=1 i
1
7) tr A = − n(n + 2);
2
1
8) tr A = n(n + 1) + Hn , где Hn — гармоническое число (см. выше).
2
1.44. Доказательство.
Справедливость утверждения tr (AB) = tr (BA) следует из цепочки
равенств:
i↔j aij bji =
bji aij =
bij aji = tr (BA).
tr (AB) =
i,j
i,j
i,j
Глава 2
Алгебра матриц
2.1.
Определители матриц. Определители
второго и третьего порядка
Одним из основополагающих понятий линейной алгебры является
определитель квадратной матрицы. Начнем рассмотрение этого понятия с определителей
второго
и третьего порядков.
a11 a12
размера 2 × 2 поставим в соответствие число
Матрице A =
a21 a22
a11 a22 − a21 a12 ,
(2.1)
которое называется определителем второго порядка матрицы A и
обозначается
a a 11 12 (2.2)
Δ ≡ det A ≡ |A| ≡ .
a21 a22 3 2
3 2
Пример 2.1. Если A =
, то Δ = = 3 · 5 − 1 · 2 = 13.
1 5
1 5
Определителем третьего порядка матрицы A размера 3 × 3 называется число, полученное согласно следующей формуле:
a11 a12 a13 Δ ≡ det A ≡ |A| ≡ a21 a22 a23 =
a31 a32 a33 = a11 a22 a33 + a12 a23 a31 + a13 a21 a32 −
− a13 a22 a31 − a12 a21 a33 − a11 a23 a32 . (2.3)
ГЛАВА 2. АЛГЕБРА МАТРИЦ
63
Формулу (2.3) легко запомнить с помощью правила треугольника:
величина определителя третьего порядка равна алгебраической сумме
шести членов, каждый из которых — произведение трех элементов, взятых по одному из каждой строки и каждого столбца матрицы A. Знак
«+» имеет произведение элементов, лежащих на главной диагонали, и
два произведения элементов, образующих в матрице треугольники с основаниями, параллельными главной диагонали. Знак «−» имеют произведения элементов, лежащих на побочной диагонали, и два произведения элементов, образующих треугольники с основаниями, параллельными побочной диагонали (см. рис. 2.1). К сожалению, правило треугольника применимо для вычисления определителей матриц только размера
3×3. Как следует поступать в случае матриц большего размера, описано
в разделе 2.2.
знак «+»
знак «−»
Рис. 2.1. Схема «правила треугольника» для расчета определителя
третьего порядка
Пример 2.2.
4 2 2
det A = |A| = −4 −3 1 =
3 0 3
= 4 · (−3) · 3 + 2 · 1 · 3 + 2 · (−4) · 0 −
− 2 · (−3) · 3 − 2 · (−4) · 3 − 4 · 1 · 0 =
= −36 + 6 + 0 + 18 + 24 − 0 = 12.
64
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Заметим, что определитель первого порядка для матрицы A = [a11 ],
состоящей из одного элемента, равен значению этого элемента: det[a11 ] =
= a11 .
2.2.
Определители n-го порядка. Миноры
Определитель n-го порядка, где n 2,
a a . . .
11 12
a21 a22 . . .
Δ = .
.. . . .
.
..
an1 an2 . . .
имеет вид
a1n a2n .
... ann (2.4)
По аналогии с (2.3) он представляет собой полином, каждое слагаемое которого является произведением ровно n элементов матрицы (aij ),
причем из каждой строки и из каждого столбца этой матрицы в произведение входит лишь один сомножитель.
Обратимся теперь к строгим определениям.
Пусть упорядоченный набор индексов (k1 , k2 , . . . , kn ) образует некоторую перестановку чисел 1, 2, . . . , n. Для n первых натуральных чисел,
как легко видеть, существует n! попарно различных перестановок.
Инверсией перестановки, или просто инверсией, называется пара (k1 , k2 ), в которой большее число стоит перед меньшим: k1 > k2 .
Пример 2.3. В наборе (4, 3, 2, 1) имеется шесть инверсий: (4, 3), (4, 2),
(4, 1), (3, 2), (3, 1), (2, 1), других инверсий в этом наборе нет.
Примечание. Единственной перестановкой, не содержащей ни одной
инверсии, является тождественная перестановка (1, 2, . . . , n).
Определителем n-го порядка матрицы (aij ) называется сумма
(−1)σ a1k1 a2k2 . . . ankn ,
(2.5)
det A =
perm
где суммирование выполняется по всем перестановкам, σ — число инверсий в перестановке (k1 , k2 , . . . , kn ). Определитель содержит n! членов, из
которых половина берется с положительным знаком и половина — с отрицательным знаком.
Пример 2.4. Раскроем определение (2.5) для случая n = 2.
Решение.
При n = 2 имеем 2! = 1 · 2 = 2 перестановки, а именно k1 = 1, k2 = 2
и k1 = 2, k2 = 1. Сумма в det A будет состоять из двух членов: a11 a22 и
ГЛАВА 2. АЛГЕБРА МАТРИЦ
65
a12 a21 , взятых с положительным и отрицательным знаком, соответственно:
(−1)σ a1k1 a2k2 = (−1)0 a11 a22 + (−1)1 a12 a21 .
(2.6)
det A =
perm
Полученная формула в точности согласуется с определением (2.1), приведенным в разделе 2.1.
Примечание. Инверсии иногда называют беспорядками [32].
Если из матрицы A n-го порядка убрать i-ю строку и j-й столбец, то
получится матрица (n − 1)-го порядка, определитель которой называют
дополнительным минором элемента aij матрицы A и обозначают
через Mij .
Величину Aij = (−1)i+j Mij называют алгебраическим дополнением (cofactor) элемента aij матрицы A.
Пример 2.5. Пусть дан определитель
2 1 −2
Δ = 3 −1 4 ,
(2.7)
−3 5 0 тогда дополнительные миноры элементов матрицы a23 и a31 и алгебраические дополнения для них равны:
2 1
M23 = = 10+3 = 13, A23 = (−1)2+3 M23 = (−1)·13 = −13, (2.8)
−3 5
M31
1 −2
=
= 4 − 2 = 2, A31 = (−1)3+1 M31 = 2.
−1 4 (2.9)
Теорема 2.1 (Теорема Лапласа ). Для определителя матрицы
A = (aij ) справедливы формулы:
1
det A =
n
aij Aij ,
i = 1, 2, . . . , n,
(2.10)
aij Aij ,
j = 1, 2, . . . , n,
(2.11)
j=1
det A =
n
i=1
1
Лаплас (Pierre-Simon, marquis de Laplace) (1749–1827) — французский математик, физик и
астроном.
66
ГЛАВА 2. АЛГЕБРА МАТРИЦ
т. е. определитель можно разложить по любой строке или любому
столбцу, используя алгебраические дополнения элементов матрицы.
Формулы (2.10) и (2.11) позволяют свести расчет определителя n-го
порядка к вычислению определителя (n − 1)-го порядка. Процедура понижения порядка продолжается до тех пор, пока мы не придем к определителям второго или третьего порядка, которые относительно легко
вычислить.
Соотношения (2.10) и (2.11) называются разложениями Лапласа.
Пример 2.6. Вычислим определитель четвертого порядка, разложив
его по первому столбцу:
2 3 −3 4 1 −1 2 3 −3 4 3 −3 4 2 1 −1 2 = 2 2 1 0 − 2 2 1 0 + 6 1 −1 2 −
Δ = 6 2 1 0 3 0 −5
3 0 −5
3 0 −5
2 3 0 −5
3 −3 4
− 2 1 −1 2 = 2(−5 + 0 + 0 − 6 − 0 − 10) −
2 1 0
− 2(−15 + 0 + 0 − 12 − 0 − 30) + 6(15 − 18 + 0 + 12 − 0 − 15) −
− 2(0 − 12 + 4 + 8 − 6 − 0) = −42 + 114 − 36 + 12 = 48.
2.3.
Общие свойства определителей.
Элементарные преобразования матрицы
Перечислим общие свойства определителей [12, 15].
Свойство 1. При транспонировании матрицы ее определитель не
меняется:
(2.12)
det AT = det A.
Свойство 2. При перестановке двух строк (столбцов) матрицы определитель меняет знак.
Свойство 3. Определитель матрицы с двумя одинаковыми строками
(или столбцами) равен нулю.
Свойство 4. Определитель матрицы с двумя пропорциональными
строками (столбцами) равен нулю.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
67
Свойство 5. Определитель матрицы не изменится, если ко всем элементам его строки (столбца) прибавить соответствующие элементы другой строки (столбца), умноженные на одно и то же число.
Свойство 6. Определитель произведения матриц равен произведению определителей, т. е.
det(A · B) = det A · det B.
(2.13)
Свойство 7. Определитель треугольной матрицы совпадает с произведением элементов, стоящих на главной диагонали.
Свойство 8. Если все элементы какой-либо строки (столбца) матрицы умножить на одно и то же число, то ее определитель умножится на
это число.
Свойство 9. Если все элементы i-й строки определителя представлены в виде суммы двух слагаемых aij = uj + vj для j = 1, . . . , n, то
определитель равен сумме двух определителей следующего вида:
a12
...
a1n a11 a12 . . . a1n a11 a12 . . . a1n a11
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . u 1 + v1 u 2 + v2 . . . u n + v n = u1 u 2 . . . u n + v 1 v 2 . . . v n .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . an1
an2
...
ann an1 an2 . . . ann an1 an2 . . . ann (2.14)
Свойство 10. Если все элементы какой-либо строки или столбца
матрицы равны нулю, то ее определитель равен нулю.
Элементарными преобразованиями матрицы называются такие
преобразования, которые связаны со свойствами 2, 5, 8: перестановка
двух строк (столбцов); умножение строки (столбца) на ненулевое число;
прибавление к одной из строк матрицы другой строки, умноженной на
любое ненулевое число (то же и для столбцов).
С помощью элементарных преобразований матрица может быть сведена к треугольному виду, а ее определитель тогда может быть легко
получен с помощью свойства 7.
Пример 2.7. Вычислим определитель
2 3 −3 4 2 1 −1 2 (2.15)
6 2 1 0 2 3 0 −5
68
ГЛАВА 2. АЛГЕБРА МАТРИЦ
с помощью элементарных преобразований матрицы, соответствующей
этому определителю.
Решение.
1) Вычитаем из второй и четвертой строки первую строку, а из третьей строки первую, умноженную на 3.
В результате получим:
2 3 −3 4 2 3 −3 4 2 1 −1 2 0 −2 2 −2 =
(2.16)
6 2 1 0 0 −7 10 −12 ;
2 3 0 −5 0 0 3 −9 7
2) прибавим к третьей строке вторую, умноженную на − :
2
2 3 −3 4 0 −2 2 −2
0 0 3 −5 ;
0 0 3 −9
3) вычтем из четвертой строки
2 3
0 −2
0 0
0 0
(2.17)
третью:
−3
2
3
0
4 −2
.
−5
−4
(2.18)
В результате получаем определитель верхней треугольной матрицы,
который равен произведению элементов, расположенных на главной диагонали:
2 · (−2) · 3 · (−4) = 48.
(2.19)
Примечание. Отметим, что в линейной алгебре известны альтернативные способы определения величины det A, в частности, аксиоматическое определение [12].
2.4.
Обратная матрица
Пусть A — квадратная матрица размера n × n, а I — единичная
матрица того же размера.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
69
Матрицу B называют обратной к матрице A, если выполняются
равенства
A · B = B · A = I.
Обратная к A матрица обозначается A−1 .
Обратим внимание на то, что не для всякой матрицы существует обратная по отношению к ней матрица.
Теорема 2.2. Если определитель матрицы A равен нулю, т. е.
det A = 0, то обратной матрицы A−1 не существует.
Квадратная матрица называется невырожденной (или неособенной), если для нее определена обратная матрица. В противном случае
A — вырожденная (особенная) матрица. Известно, что матрица, обратная к неособенной матрице, единственна.
Теорема 2.3. Если определитель матрицы A = (aij ) отличен от
нуля, т. е. Δ = det A = 0, то существует обратная матрица
A−1 =
1
(Aij )T ,
Δ
(2.20)
где (Aij ) — матрица, составленная из алгебраических дополнений элементов aij матрицы A (cofactor matrix).
Примечание. Матрица, транспонированная к (Aij ), называется присоединенной (adjugate, classical adjoint) по отношению к исходной [44,
56, 76, 32].
Справедливы следующие утверждения.
1. Если матрица A обратима, то AT также обратима, причем (AT )−1 =
(A−1 )T .
2. Если матрицы A и B обратимы, то (A B)−1 = B −1 A−1 .
3. Обратная к верхней (нижней) треугольной матрице также является
верхней (нижней) треугольной.
1
.
4. Если существует A−1 , то det(A−1 ) =
det A
Пример 2.8. Найдем обратную матрицу для матрицы:
⎡
⎤
2 5 7
⎢
⎥
⎥.
A=⎢
(2.21)
6
3
4
⎣
⎦
5 −2 −3
70
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Решение.
Определитель матрицы равен
3 4
6 4 6 3 det A = 2 − 5
+ 7
=
−2 −3
5 −3
5 −2
= 2(−9 + 8) − 5(−18 − 20) + 7(−12 − 15) = −1.
Вычислим алгебраические дополнения:
6 4 3 4
A11 = (−1)1+1 = 38,
= −1, A12 = (−1)1+2 5 −3
−2 −3
A13
A22
(2.22)
(2.23)
6 3 5 7
= (−1)1+3 = −27, A21 = (−1)2+1 = 1,
5 −2
−2 −3
(2.24)
2 7 2 5 = (−1)2+2 = −41, A23 = (−1)2+3 = 29,
5 −3
5 −2
(2.25)
A31 = (−1)
7
3+2 2 7
= −1, A32 = (−1) = 34,
3 4
6 4
2 5
A33 = (−1)3+3 = −24.
6 3
3+1 5
(2.26)
(2.27)
Запишем матрицу, сформированную из алгебраических дополнений:
⎤
⎡
−1 38 −27
⎢
⎥
⎢ 1 −41 29 ⎥ .
(2.28)
⎣
⎦
−1 34 −24
В результате искомая обратная матрица будет иметь вид:
⎡
⎤ ⎡
⎤
−1
1
−1
1
−1
1
⎥ ⎢
⎥
1 ⎢
⎢ 38 −41 34 ⎥ = ⎢−38 41 −34⎥ .
A−1 =
⎣
⎦
⎣
⎦
(−1)
−27 29 −24
27 −29 24
(2.29)
ГЛАВА 2. АЛГЕБРА МАТРИЦ
2.5.
71
Целочисленные степени матриц
Понятие возведения числа в целую степень в матричной алгебре легко
обобщается. По определению
A0 = I,
A1 = A,
A2 = AA,
A3 = AAA,
...,
(2.30)
и если A — невырожденная матрица, то
A−p = (A−1 )p = (Ap )−1 .
(2.31)
Для диагональных матриц их p-я степень сохраняет свойство диагональности:
⎤p ⎡ p
⎤
⎡
d1 0 . . . 0
d1 0 . . . 0
⎥
⎥
⎢
⎢
p
⎥
⎢
⎢ 0 d2 . . . 0 ⎥
⎥ = ⎢ 0 d2 . . . 0 ⎥
⎢
(2.32)
⎢. . . . . . . . . . . . . .⎥
⎢. . . . . . . . . . . . . .⎥
⎦
⎣
⎦
⎣
0 0 . . . dn
0 0 . . . dpn
для всех целых p.
Для решения последующих задач нам потребуется метод математической индукции.
2.5.1.
Метод математической индукции
Для доказательства утверждений, зависящих от натурального параметра, в математике широко используется метод математической индукции [1, 14, 25] (от латинского inductio — выведение).
Принцип математической индукции. Пусть P (n) — утверждение, определенное для всех натуральных чисел n, и пусть выполняются
следующие условия:
1) P (1) истинно;
2) ∀k 1 справедливо логическое следствие P (k) ⇒ P (k + 1) .
Тогда P (n) истинно при любом натуральном n.
Высказывание 1 обычно называют базой индукции, высказывание
2 — шагом индукции.
Для доказательства тождеств методом математической индукции поступают следующим образом. Пусть утверждение P (k) принимает истинное значение, когда рассматриваемое тождество верно для некоторого
натурального числа k. Тогда доказываются два утверждения:
1) база индукции, т. е. P (1);
72
ГЛАВА 2. АЛГЕБРА МАТРИЦ
2) шаг индукции, т. е. P (k) ⇒ P (k + 1) для произвольного k 1.
Согласно методу математической индукции делается вывод о справедливости рассматриваемого тождества для всех натуральных значений
n.
Заметим, что в математической логике утверждение вида P (n) называется предикатом.
Пример 2.9. С помощью метода математической индукции докажем
утверждение:
1 + 3 + 5 + . . . + (2n − 1) = n2 для всех натуральных чисел n.
Доказательство.
Пусть P (n) — предикат «1 + 3 + 5 + . . . + (2n − 1) = n2 ».
База индукции
Для n = 1 получаем 1 = 12 , т. е. P (1) — истинно.
Шаг индукции
Пусть для n = k утверждение 1 + 3 + 5 + . . . + (2k − 1) = k 2 истинно.
Докажем истинность P (k + 1):
1 + 3 + 5 + . . . + (2k − 1) + (2(k + 1) − 1) =
= k 2 + (2(k + 1) − 1) = k 2 + 2k + 1 = (k + 1)2 .
Таким образом, при любом натуральном k справедлива импликация
P (k) ⇒ P (k + 1). Значит, по принципу математической индукции предикат P (n) имеет истинное значение для всех натуральных n.
Пример 2.10. Опираясь на метод математической индукции докажем,
что n2 + n четно для всех натуральных n.
Доказательство.
Обозначим f (n) = n2 + n и P (n) — предикат «f (n) делится на 2».
База индукции
При n = 1 получаем f (1) = 12 + 1 = 2 — четное число, поэтому P (1)
истинно.
Шаг индукции
Предположим, что f (k) четно для натуральных k 1. Докажем, что
это влечет четность f (k + 1):
f (k + 1) = (k + 1)2 + (k + 1) = k 2 + 2k + 1 + k + 1 =
= (k 2 + k) + 2k + 2 = f (k) + 2(k + 1).
Поскольку в правой части полученного соотношения стоит сумма двух
четных чисел, то f (k + 1) делится на 2.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
73
Примечание. Утверждение примера становится очевидным, если представить выражение k 2 + k в виде k 2 + k = k(k + 1). Из двух последовательных натуральных чисел одно обязательно является четным, и их
произведение кратно двум.
a c
Пример 2.11. Вычислим сотую степень матрицы A =
.
0 a
Найдем несколько младших степеней этой матрицы:
2
3
2
2ac
3a
c
a
c
a
c
a
a
c
a
, A3 =
, ...
, A2 =
=
A1 =
2
0 a
0 a3
0 a
0 a 0 a
(2.33)
Возникает предположение,
значений n спра
n что для всех натуральных
a c
an nan−1 c
ведливо равенство:
=
.
0 a
0
an
Чтобы проверить это предположение, воспользуемся методом математической индукции.
Докажем, что для всех натуральных n выполняется равенство:
n
A =
an nan−1 c
0
an
.
(2.34)
Доказательство.
n
n−1
a
na
c
Обозначим предикат «An =
» через P (n).
0
an
База индукции
Рассмотрим случай n = 1. Равенство принимает вид A1 = A, что
является истинным утверждением.
Шаг индукции
Предположим, что P (k) для некоторого
k = 1, 2, . . . принимает ис
k
k−1
a ka c
. Докажем, что P (k + 1) — истинное значение, т. е. Ak =
0
ak
тинно.
Запишем предикат P (k + 1) в виде:
Ak+1 =
ak+1 (k + 1)ak c
0
ak+1
.
(2.35)
74
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Воспользуемся индуктивным предположением и перепишем сумму
Ak+1 как Ak A:
ak kak−1 c a c
ak · a ak c + kak−1 c · a
k+1
=
A
.
=
0
ak
0
ak · a
0 a
После алгебраических преобразований получаем:
k+1
k
a
(k
+
1)a
c
Ak+1 =
.
0
ak+1
Это выражение совпадает с (2.35). Значит, при любом k = 1, 2, . . . импликация P (k) ⇒ P (k + 1) справедлива,
и методом математической ин
n
n−1
a na c
для всех натуральных n.
дукции доказано, что An =
0
an
100
Подставляя в(2.34) значение n = 100, окончательно получаем: A =
a100 100a99 c
.
=
0
a100
Операцию возведения матрицы в степень удается выполнить путем
относительно малого количества вычислений, если исходная матрица
представима в виде
(2.36)
B = U −1 DU,
где D — диагональная матрица, U — невырожденная матрица: U U −1 = I.
Вычисление B p = (U −1 DU )p проведем, опираясь на свойство ассоциативности операции умножения (см. с. 25):
B p =(U −1 DU )p = (U −1 DU )(U −1 DU )(U −1 DU ) . . . (U −1 DU )(U −1 DU ) =
!"
#
p раз
−1
−1
−1
−1
= U D(U U )D(U U )D(U . . . U )D(U U −1 )DU =
= U −1 DIDID . . . DIDU = U −1 (DD . . . D) U = U −1 Dp U.
!" #
(2.37)
p раз
Правило возведения в степень матрицы B обобщается на случай целых отрицательных p = −abs(p):
B −abs(p) = (U −1 BU )−abs(p) = ((U −1 BU )−1 )abs(p) =
= (U −1 B −1 (U −1 )−1 )abs(p) = (U −1 B −1 U )abs(p) =
= U −1 B −abs(p) U = B p .
(2.38)
ГЛАВА 2. АЛГЕБРА МАТРИЦ
75
Следовательно, представленные выше рассуждения доказывают теорему о возведении в целую степень матриц B специального вида (2.36).
Теорема 2.4 (о степени матрицы). Для произвольной матрицы
B, представимой в виде B = U −1 DU , и целого числа p справедливо
равенство:
(2.39)
B p = U −1 Dp U.
Пример 2.12. Докажем, что разные целые степени матрицы коммутируют:
(2.40)
Ap1 Ap2 = Ap2 Ap1
Доказательство.
В самом деле, на основании свойств операции возведения в степень
имеем: Ap1 Ap2 = Ap1 +p2 = Ap2 +p1 = Ap2 Ap1 .
2.6.
Функции от матриц
Матрица может выступать в качестве аргумента некоторой функции.
Начнем с рассмотрения полинома от матрицы. Как известно, полиномом
степени p от переменной x называется сумма f (x) вида:
f (x) = c0 + c1 x + c2 x2 + · · · + cp xp ,
(2.41)
где ci (i = 0, 1, . . . , p) — произвольные численные коэффициенты.
Заметим, что полином также называют многочленом.
Под полиномом f (A) степени p от матрицы A будем понимать выражение
(2.42)
f (A) = c0 I + c1 A + c2 A2 + . . . + cp Ap .
Как легко видеть, значение функции f (A) есть, в свою очередь, тоже
некоторая матрица. Ее элементы выражаются формулами:
(f (A))ij = c0 δij + c1 (A)ij + c2 (A2 )ij + . . . + cp (Ap )ij .
(2.43)
Используя теорему о степени матрицы специального вида (2.39), запишем соотношение
f (U −1 AU ) = U −1 f (A)U,
(2.44)
справедливое для произвольной невырожденной матрицы U .
Дробно-рациональной функцией от матрицы называется величина
f1 (A)
(2.45)
= f1 (A)(f2 (A))−1 = (f2 (A))−1 f1 (A)
f2 (A)
76
ГЛАВА 2. АЛГЕБРА МАТРИЦ
при условии det f2 (A) = 0.
Покажем корректность введенного определения, т. е. что два произведения в (2.45) всегда равны между собой. Действительно, умножив
обе части равенства f1 (A)(f2 (A))−1 = (f2 (A))−1 f1 (A) на f2 (A) справа и,
затем, на f2 (A) слева, получим
f2 (A)f1 (A) = f1 (A)f2 (A).
(2.46)
Полиномы f1 (A) и f2 (A) зависят только от матрицы A, и, следовательно,
f1 (A)
определено корректно [68].
коммутируют. В силу этого частное
f2 (A)
2.6.1.
Экспонента и логарифм
Бесконечная сумма матриц размера m × n вида
A + B + C + ... + Z + ...
(2.47)
называется рядом. Говорят, что ряд сходится, если для всех i = 1, 2, . . . ,
m и j = 1, 2, . . . , n сходятся последовательности из соответствующих
компонент этих матриц [68]:
aij + bij + . . . + tij + . . .
(2.48)
По определению, экспоненту eA квадратной матрицы A полагают
равной сумме
eA = I + A +
1 2 1 3
1
A + A + . . . + Ap + . . .
2!
3!
p!
(2.49)
Известно, что этот ряд сходится для любой вещественной квадратной
матрицы [58]. Матрица I в формуле (2.49) берется того же порядка, что
и A.
В компактном виде эту сумму можно представить как
A
e =
∞
Ap
p=0
p!
.
(2.50)
Иногда, особенно при записи формул с дробями, применяется другое
обозначение для матричной экспоненты,
а именно как exp A.
1 λ
Пример 2.13. Вычислим exp
, где λ ∈ R.
0 1
ГЛАВА 2. АЛГЕБРА МАТРИЦ
77
Решение.
Как следует из формулы (2.34), доказанной
pв примере
2.11, для всех
1 λ
1 pλ
натуральных p выполняется равенство
=
. Обозначим
0 1
0 1
1 λ
A=
.
0 1
Используя определение (2.49), получим:
∞
p
1
0
1
2λ
1
3λ
1
λ
A
1
1
=
+
+
+ ... =
eA =
+
p!
2! 0 1
3! 0 1
0 1
0 1
p=0
⎡∞
⎤
⎡
∞ p⎤
1
∞
1
λ
⎥ ⎢e λ
⎢p=0 p!
e
λe
1
λ
p!
⎥
p=0
⎥
p=1 (p − 1)! ⎦ =
=e
=⎢
.
∞ 1 ⎦ = ⎣
⎣
0 e
0 1
0
0
e
p=0 p!
(2.51)
При вычислении элементов матрицы eA было использовано определение числа e = 2,71818 . . . (или, как его еще называют, основания
натуральных логарифмов), известное из курса математического анализа [80]:
∞
1
1
1
1
= 1 + + + ... + + ...
(2.52)
e=
p!
1!
2!
p!
p=0
Примечание. Понятие экспоненты от матрицы широко используется
в теории систем дифференциальных уравнений [34].
Логарифмом квадратной матрицы A называется сумма
1
1
1
ln A = (A−I)− (A−I)2 + (A−I)3 −. . .+(−1)p−1 (A−I)p +. . . , (2.53)
2
3
p
если этот ряд сходится. Как и в случае матричной экспоненты, единичная матрица I в формуле (2.53) должна иметь тот же порядок, что и A.
В компактном виде сумму (2.53) можно представить следующим образом:
∞
(−1)p
(A − I)p .
ln A =
p
p=1
1 λ
Пример 2.14. Вычислим ln
, где λ ∈ R.
0 1
78
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Решение.
Нам потребуются натуральные степени разности матриц (A − I) =
0 λ
=
.
0 0
0 λ 0 λ
0 0
2
Поскольку (A − I) =
=
, то все слагаемые ряда
0 0 0 0
0 0
в (2.53), кроме первого, в данном случае равны нулевой матрице. Следовательно, значение
ln A полностью определяется первым слагаемым
0 λ
ряда ln A =
.
0 0
Теорема 2.5. Для определителя произвольной матрицы A справедлива формула
det A = exp(tr ln A).
(2.54)
Примечание. Большое количество примеров использования различных функций от матриц для решения практических задач рассмотрены
в [55].
2.7.
Ранг матрицы
,...,ik
Минором k-го порядка Mji11,j,i22,...,j
матрицы A размера m × n называk
ется определитель матрицы, полученной из элементов, стоящих на пересечении выбранных строк с номерами i1 , i2 , . . . , ik и столбцов с номерами
j1 , j2 , . . . , jk при условии 1 i1 < i2 < · · · < ik m и 1 j1 < j2 < · · · <
< jk m.
Пример 2.15. Пусть дана квадратная матрица
⎤
⎡
a11 a12 a13
⎥
⎢
⎥
(2.55)
A=⎢
⎣a21 a22 a23 ⎦ ,
a31 a32 a33
для которой число строк m и число столбцов n равны m = n = 3.
Тогда миноры второго порядка матрицы A имеют вид
a a a a 11 12 11 13 1,2
1,2
M1,3
(2.56)
=
=
M1,2
,
,
a21 a22 a21 a23 a a a a 11 12 11 13 1,3
1,3
=
=
M1,3
(2.57)
M1,2
,
a31 a32 a31 a33 ГЛАВА 2. АЛГЕБРА МАТРИЦ
и т. д. до минора
2,3
M2,3
79
a a 22 23 =
.
a32 a33 (2.58)
Всего для матрицы размера 3 × 3 можно составить девять миноров
второго порядка (количество миноров матрицы произвольного порядка
см. в решении упр. 2.18).
Число r называется рангом матрицы A, если существует минор порядка r, отличный от нуля, и все миноры большего порядка равны нулю.
Любой минор максимального порядка r, отличный от нуля, называется базисным.
Для ранга матрицы A используется обозначение rk A.
В дальнейшем изложении нам потребуется понятие линейной зависимости строк матрицы. Пусть даны k строк вида
U1 = [u11 u12 . . . u1n ],
U2 = [u21 u22 . . . u2n ],
.......................
(2.59)
Uk = [uk1 uk2 . . . ukn ],
каждая из которых содержит n вещественных чисел. Умножим каждый
элемент первой строки на некоторое вещественное число α1 , каждый элемент второй строки — на вещественное число α2 , и т. д. После этого просуммируем соответствующие элементы полученных строк. В результате
получим новую строку:
W = α 1 U1 + α 2 U2 + . . . + α k u k =
= α1 [u11 u12 . . . u1n ] +
+ α2 [u21 u22 . . . u2n ] +
(2.60)
........................
+ αk [uk1 uk2 . . . ukn ].
Строка W называется линейной комбинацией строк Ui (i = 1, 2, . . . , k).
О числах αi , где i = 1, 2, . . . , k, говорят как о коэффициентах линейной комбинации строк.
Если существует набор вещественных чисел α1 , α2 , . . . , αk , среди которых хотя бы одно не равно нулю, таких, что W является нулевой строкой, то строки U1 , U2 , . . . , Uk называют линейно зависимыми. В противном случае говорят, что эти строки линейно независимые.
80
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Аналогично вводится определение линейной зависимости/независимости столбцов матрицы.
Пример 2.16. Строки U1 = [1 0 −3], U2 = [3 −2 1], U3 = [5 −2 −5]
являются линейно зависимыми, поскольку существует их линейная комбинация, равная нулевой строке:
2U1 + U2 − U3 = [0 0 0].
(2.61)
Теорема 2.6 (о базисном миноре). Число линейно независимых
строк и столбцов матрицы одинаково и равно порядку базисного минора. При этом строки (столбцы), входящие в базисный минор, линейно
независимы, а остальные через них линейно выражаются.
Примечание. У нулевой матрицы нет линейно независимых строк. В
связи с этим ранг матрицы, образованной нулевыми элементами, будем
считать равным нулю по определению [10, 18].
При элементарных преобразованиях ранг матрицы не меняется.
Напомним, что элементарными преобразованиями матрицы называются (см. раздел 2.3):
а) перестановка двух строк (столбцов);
б) умножение строки (столбца) на ненулевое число;
в) прибавление к одной из строк матрицы другой строки, умноженной
на любое ненулевое число (то же и для столбцов).
При вычислении ранга матрицы используется вычеркивание нулевой
строки (столбца) или одной из двух пропорциональных строк (столбцов),
при этом ранг матрицы не меняется.
Матрицу называют ступенчатой, если каждая ее строка начинается
со строго большего числа нулей, чем предыдущая строка.
Одним из основных методов нахождения ранга матрицы является
метод элементарных преобразований.
Метод элементарных преобразований позволяет привести матрицы к ступенчатому виду с помощью следующего алгоритма.
1) Выбираем строку, в начале которой стоит ненулевой элемент. Эту
строку записывают первой и называют рабочей.
2) Ко всем оставшимся строкам прибавляют рабочую, умноженную
на
ai1
(2.62)
−
a11
(здесь i — номер строки, к которой прибавляют рабочую). В результате
во всех строках, кроме рабочей, первые элементы будут равны нулю.
3) Из оставшихся строк выбирают ту, у которой второй элемент не
равен нулю. Ее записывают второй и считают рабочей.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
81
4) К оставшимся строкам прибавляют рабочую строку, умноженную
на
ai2
.
(2.63)
a22
В результате во втором столбце образовались нулевые элементы за исключением первой и второй строки.
Этот процесс продолжается до получения ступенчатой матрицы. Количество ненулевых строк в этой матрице и будет ее рангом.
Пример 2.17. Найдем ранг матрицы методом элементарных преобразований:
⎡
⎤
3 5 7
⎢
⎥
⎢
A = ⎣ 1 2 3⎥
(2.64)
⎦.
−
1 3 5
Минор третьего порядка представляет собой определитель матрицы:
1,2,3
= det A.
M1,2,3
Вычислим определитель матрицы A методом разложения по первому
столбцу:
2 3
5 7
5 7
det A = 3 · (−1)1+1 + 1 · (−1)2+1 + 1 · (−1)3+1 =
3 5
3 5
2 3
= 3 · (10 − 9) − 1 · (25 − 21) + 1 · (15 − 14) = 3 − 4 + 1 = 0.
Рассмотрим минор второго порядка
3 5
1,2
M1,2 = = 1 = 0.
1 2
(2.65)
Так как он не равен нулю, то rk A = 2.
Вычислить ранг матрицы, исходя из его определения, часто бывает
сложно, так как приходится перебирать большое количество миноров.
Для того, чтобы облегчить вычисление ранга матрицы, ее, как правило,
с помощью элементарных преобразований (см. раздел 2.3) приводят к
более простому виду.
Итак, ранг матрицы, представленной в ступенчатой форме, равен количеству ненулевых строк.
В дальнейшем будем использовать следующие обозначения для эквивалентных преобразований:
A → B — матрица B получена в результате элементарного преобразования матрицы A;
82
ГЛАВА 2. АЛГЕБРА МАТРИЦ
(i) + a(j) — прибавление к i-й строке матрицы строки с номером j,
умноженной на константу a;
(i) − a(j) — вычитание из i-й строки матрицы строки с номером j,
умноженной на константу a;
(i) ↔ (j) — перестановка двух строк.
Аналогичные обозначения будем применять и для действий со столбцами, причем столбец с номером j будем обозначать через [j].
Пример 2.18. Найдем ранг матрицы
⎡
⎤
3 −1 3 2 5
⎢
⎥
⎢5 −3 2 3 4 ⎥
⎢
⎥
(2.66)
⎢1 −3 −5 0 −7⎥ .
⎣
⎦
7 −5 1 4 1
Решение.
Поменяем местами первую и третью строки:
⎡
⎤
1 −3 −5 0 −7
⎢
⎥
⎢5 −3 2 3 4 ⎥
⎢
⎥
⎢3 −1 3 2 5 ⎥ .
⎣
⎦
7 −5 1 4 1
(2.67)
Ко второй строке прибавим элементы первой строки, умноженные
на (−5), к третьей — на (−3) и к четвертой — на (−7). В результате
получим:
⎡
⎤
1 −3 −5 0 −7
⎢
⎥
⎢0 12 27 3 39 ⎥
⎢
⎥
(2.68)
⎢0 8 18 2 26 ⎥ .
⎣
⎦
0 16 36 4 50
Разделим вторую строку на 3, третью и четвертую строки на 2:
⎡
⎤
1 −3 −5 0 −7
⎢
⎥
⎢0 4 9 1 13 ⎥
⎢
⎥
(2.69)
⎢0 4 9 1 13 ⎥ .
⎣
⎦
0 8 18 2 25
Затем вычтем из третьей строки вторую, а из четвертой — удвоенную
ГЛАВА 2. АЛГЕБРА МАТРИЦ
83
вторую:
⎡
1 −3 −5 0 −7
⎢
⎢0
⎢
⎢0
⎣
0
4
9
0
0
0
0
⎡
⎤
⎥
1 13 ⎥
⎥ →(3)↔(4)
0 0⎥
⎦
0 −1
1 −3 −5 0 −7
⎢
⎢0
⎢
⎢0
⎣
0
4
9
0
0
0
0
⎤
⎥
1 13 ⎥
⎥.
0 −1⎥
⎦
0 0
(2.70)
Получена ступенчатая форма матрицы. Количество ненулевых строк
равно трем, и, следовательно, ранг этой матрицы равен трем.
Существует еще один способ вычисления ранга матрицы. Он называется методом окаймляющих миноров и состоит в следующем. Для
вычисления величины rk A последовательно вычисляем миноры, переходя от миноров меньших порядков к минорам бо́льших порядков. Если
уже найден минор r-го порядка
⎤
⎡
a11 . . . a1r
⎥
⎢
⎥
(2.71)
M =⎢
⎣. . . . . . . . . . .⎦ ,
ar1 . . . arr
отличный от нуля, то достаточно вычислить лишь миноры (r + 1)-го
порядка, окаймляющие минор M :
⎤
⎡
a11 . . . a1r a1t2
⎥
⎢
⎢. . . . . . . . . . . . . . . . . . ⎥
⎥ для всех t1 , t2 > r.
⎢
(2.72)
⎥
⎢a
⎣ r1 . . . arr art2 ⎦
at1 1 . . . at1 r at1 t2
В случае, если все они оказались равными нулю, получаем rk A = r.
Метод окаймляющих миноров особенно удобен в тех задачах, где
встречаются функциональные матрицы или матрицы, элементы которых зависят от параметров (см. напр., упр. 2.60).
Контрольные вопросы к главе «Алгебра
матриц»
1. Что такое определитель второго порядка, третьего порядка?
2. Сформулируйте правило треугольника вычисления определителя
третьего порядка.
84
ГЛАВА 2. АЛГЕБРА МАТРИЦ
3. Дайте определение понятия инверсии.
4. Запишите формулу для определителя n-го порядка.
5. Как связаны между собой дополнительный минор Mij элемента aij
и его алгебраическое дополнение Aij ?
6. Сформулируйте теорему Лапласа.
7. Перечислите общие свойства определителей.
8. Какие преобразования матриц относятся к элементарным?
9. Что такое обратная матрица?
10. Какая матрица называется вырожденной?
11. Для чего используется метод математической индукции?
12. Как вычисляют функции от матриц?
13. Дайте определение экспоненты и логарифма матрицы.
14. Какие строки называются линейно зависимыми?
15. Как формулируется теорема о базисном миноре?
16. На чем основан метод элементарных преобразований?
17. Перечислите способы нахождения ранга матрицы.
Задачи для самостоятельного решения
2.1. Раскройте определение (2.5) для случая n = 3.
2.2. Определите количество инверсий в перестановке (5, 1, 4, 3, 6, 8, 7, 2).
2.3. Сколько инверсий содержится в перестановке (n, n − 1, . . . , 2, 1)?
2.4. Определите количество инверсий в каждой из перестановок набора
из 2n чисел:
1) (1, 3, 5, 7, . . . , 2n − 1, 2, 4, 6, . . . , 2n);
2) (2, 4, 6, . . . , 2n, 1, 3, 5, 7, . . . , 2n − 1).
ГЛАВА 2. АЛГЕБРА МАТРИЦ
85
2.5. С каким знаком входит в выражение для определителя (2.5) слагаемое an1 an−1,2 . . . a2,n−1 a1n ?
2.6. Вычислите определители третьего порядка:
3 −2 1 1 2 0 2 0 5 1) −2 1 3 ; 2) 0 1 3 ; 3) 1 3 16 ;
5 0 −1
0 −1 10
2 0 −2
2 −1 3
2 1 0 2 0 0
4) −2 3 2 ; 5) 1 0 3 ; 6) 3 3 0 .
0 2 5
0 5 −1
4 4 4
2.7. Вычислите определители четвертого порядка:
−3
2
а) 1
−1
2 −1 1 0 2 −1 3 4 0
0 1 2 −1
0 −1 5 −3
2 0 0
; в) ; б) 3 −1 2 3 .
3 −1 0
0 0 5 −3
3 1 6 1 0 0 0 2 5 3 5
0
0
2.8. Решите следующее уравнение относительно переменной x:
x 1 1 1 1 x 1 1
1 1 x 1 = 0.
1 1 1 x
2.9. Вычислите определитель
1 1 1 . . . 1
1 1 2 1 . . . 1
1 1 1 3 . . . 1
1 ,
. . . . . . . . . . . . . . . . . . . .
1 1 1 1 . . . p
1 1 1 . . . 1 p + 1
где p — натуральное число.
86
ГЛАВА 2. АЛГЕБРА МАТРИЦ
∗ 2.10. Вычислите определитель матрицы Q размера n × n, элементы которой равны:
а) qij = δi,j+1 + δi+1,j ,
б) qij = δi,j+1 − δi+1,j
для всех 1 i, j n. Здесь δk1 ,k2 — символ Кронекера (см. с. 20).
2.11. Последовательность Фибоначчи2
Fn = 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, . . .
для n = 1, 2, . . .
определяется рекуррентным соотношением: Fn+2 = Fn + Fn+1 с
начальными условиями F1 = F2 = 1 [4, 6].
Докажите, что (n + 1)-й член ряда Фибоначчи равен определителю
n-го порядка
⎡
⎤
1 1 0 0 ... 0 0
⎢
⎥
⎢−1 1 1 0 . . . 0 0⎥
⎢
⎥
⎢
⎥
⎢ 0 −1 1 1 . . . 0 0⎥
⎢
⎥
⎥.
Fn+1 = ⎢
(2.73)
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
⎢
⎥
⎢
⎥
⎢ 0 0 0 0 . . . 1 0⎥
⎢
⎥
⎢ 0 0 0 0 . . . 1 1⎥
⎣
⎦
0 0 0 0 . . . −1 1
∗ 2.12. Определителем Вандермонда3 называется определитель размера n × n, составленный из вещественных чисел a1 , a2 , . . . , an :
1
1 ... 1 1
a1
a2
a3 . . . an Vn = a21
(2.74)
a22
a23 . . . a2n .
. . . . . . . . . . . . . . . . . . . . . . . . . . n−1 n−1 n−1
a1
a2
a3
. . . an−1
n 1) Проверьте, что при n = 2 этот определитель равен V2 = a2 − a1 .
2
Под именем Фибоначчи известен средневековый математик Пизано (Leonardo Pisano) (ок. 1170
— ок. 1250).
3
Вандермонд (Alexandre-Théophile Vandermonde) (1735–1796) — французский математик и музыкант.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
87
2) Методом математической индукции докажите, что определитель
Вандермонда Vn равен произведению всевозможных разностей aj −
ai для 1 i < j n:
$
(aj − ai ).
(2.75)
Vn =
i<j
2.13. Пусть A — матрица размера n × n, m — произвольное натуральное
число. Верно ли, что выполняется равенство det(mA) = mn det A?
2.14. На экзамене по линейной алгебре студент утверждает, что определитель суммы двух матриц всегда равен сумме определителей этих
матриц: det(A + B) = det A + det B. Прав ли студент?
2.15. Является ли определитель
1
1
1
10000
1
10000
1
1
1
1
1
1
1
10000
1 1
10000
1
1
1 1
1
10000
1
1 (2.76)
положительным числом, отрицательным числом или нулем?
2.16. Является ли определитель
10000
3
4
5 1
5
1
2
3
10000
4
5
1
10000
3 3
4
10000
1
2 10000
3
4
5
1 (2.77)
положительным числом, отрицательным числом или нулем?
2.17. Используя Python, вычислите определители в упр. 2.15 и 2.16 и
убедитесь в правильности решения этих упражнений.
2.18. Определите количество миноров k-го порядка в матрице, состоящей из m строк и n столбцов.
2.19. Сколько миноров k-го порядка в матрице размера n×n не содержат
диагональных элементов исходной матрицы?
88
ГЛАВА 2. АЛГЕБРА МАТРИЦ
∗ 2.20. Какое наибольшее значение может принимать определитель матрицы размера 3 × 3, состоящей из элементов +1 и −1?
∗ 2.21. Какое наибольшее значение может принимать определитель матрицы размера 3 × 3, состоящей из элементов 0 и 1?
2.22. Изменится ли определитель матрицы, если переставить ее столбцы
в обратном порядке?
2.23. Вычисление определителя матрицы с использованием
Python
В текстовом файле input.txt записаны подряд по строкам элементы целочисленной квадратной матрицы A. Используя рекурсию, вычислите определитель det A. Результат выведите в текстовый файл output.txt.
2.24. Оцените число умножений, выполняемых рекурсивным алгоритмом вычисления определителя матрицы размера n × n (см. предыдущее упражнение).
∗ 2.25. Докажите, что точное число умножений, выполняемых рекурсивным алгоритмом вычисления определителя матрицы размера n × n
(см. упр. 2.23 и 2.24), равно
T (n) = enΓ(n, 1) − n!,
%∞
где e — основание натуральных логарифмов; Γ(n, x) = e−t tn−1 dt —
x
&
неполная гамма-функция для натуральных n ∈ N верно раn−1
xk '
−x
венство Γ(n, x) = (n − 1)! e
.
k=0 k!
∗ 2.26. Получите асимптотическую оценку для среднего значения числа
инверсий A(N ) в массиве, состоящем из N элементов, при N → ∞.
∗ 2.27. Докажите справедливость тождества
det(I + εB) = 1 + ε tr B + O(ε2 ) при ε → 0,
(2.78)
где B — некоторая квадратная матрица, I — единичная матрица
того же размера.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
89
∗ 2.28. Получите асимптотическую оценку величины
I
det
при ε → 0,
(I + εB)p
(2.79)
если B — произвольная квадратная матрица, I — единичная матрица того же размера, p ∈ N.
∗ 2.29. Пусть M = G + εH, где ε — вещественное число, G — обратимая
матрица. Опираясь на равенство det A = exp(tr ln A) (см. теорему 2.5 на с. 78), докажите, что
det M =
1
= det G 1 + εtr (G−1 H) + ε2 (tr2 (G−1 H) − tr (G−1 H)2 ) + O(ε3 )
2
(2.80)
при ε → 0.
2.30. Пусть выбраны вещественные параметры a, b, c и d такие, что выполняется
ad − bc = 0. Вычислите матрицу, обратную
неравенство
a b
кA=
.
c d
2.31. Найдите обратные матрицы к следующим матрицам:
1 2
3 4
1)
; 2)
;
3 4
5 7
⎡
3 −4
⎤
5
⎡
⎤
2 7 3
⎡
⎤
1
2
2
⎢
⎥
⎢
⎥
⎢
⎥
⎥ ; 4) ⎢3 9 4⎥ ; 5) ⎢2 1 −2⎥ .
3) ⎢
2
−3
1
⎣
⎦
⎣
⎦
⎣
⎦
2 −2 1
3 −5 −1
1 5 3
2.32. Найдите обратные матрицы к следующим матрицам:
⎡
⎤
⎡
⎤
1 1 1 1
1 1 1
⎢
⎥
⎢0 2 2 2⎥
⎢
⎥
1 1
⎢
⎥.
⎢
⎥
1)
; 2) ⎣0 2 2⎦ ; 3) ⎢
⎥
0 2
⎣0 0 3 3⎦
0 0 3
0 0 0 4
2.33. Вычислите коммутаторы [A, A−1 ] и [A−1 , A].
90
ГЛАВА 2. АЛГЕБРА МАТРИЦ
2.34. При каких значениях вещественного параметра λ матрица не имеет
обратной?
⎡
⎤
−1 λ λ
⎢
⎥
⎢
1) ⎣ λ λ 0 ⎥
⎦;
6
4 λ
⎡
⎤
3
λ
λ
⎢
⎥
⎥.
2) ⎢
λ
λ
−1
⎣
⎦
−1 −1 λ
2.35. Вычислите матрицу, обратную к A:
⎡
1 α 0 0
⎤
⎢
⎥
⎢0 1 β 0 ⎥
⎢
⎥,
A=⎢
⎥
⎣0 0 1 γ ⎦
0 0 0 1
где α, β, γ ∈ R. При всех ли возможных значениях параметров
матрица A−1 существует?
∗ 2.36. Вычислите матрицу, обратную к Gn размера n × n, где n 2:
⎡
⎤
0 0 0 ... 0 1
⎢
⎥
⎢0 0 0 . . . 1 0 ⎥
⎢
⎥
⎢
⎥
Gn = ⎢. . . . . . . . . . . . . . . .⎥ .
⎢
⎥
⎢0 1 0 . . . 0 0 ⎥
⎣
⎦
1 0 0 ... 0 0
(2.81)
2.37. Элементы матрицы Гильберта4 H = (hij ) задаются по правилу
1
hij =
, где i, j = 1, 2, . . . , n.
i+j−1
С помощью Python вычислите H −1 , H ·H −1 и H −1 ·H для n = 6, 7, 8.
4
Powered by TCPDF (www.tcpdf.org)
Гильберт (David Hilbert) (1862–1943) — немецкий математик.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
91
∗ 2.38. Найдите обратную к следующей матрице:
⎡
⎤
1 λ λ2 λ3 . . . λn
⎢
⎥
⎢0 1 λ λ2 . . . λn−1 ⎥
⎢
⎥
⎢
⎥
⎢0 0 1 λ . . . λn−2 ⎥ ,
⎢
⎥
⎢. . . . . . . . . . . . . . . . . . . . . . ⎥
⎣
⎦
0 0 0 0 ... 1
где λ — некоторое вещественное число.
2.39. С помощью метода математической индукции докажите формулу
обращения произведения матриц
−1
−1 −1
(A1 A2 . . . An−1 An )−1 = A−1
n An−1 . . . A2 A1 .
(2.82)
2.40. Решите матричные уравнения:
2 1
−6 4
1)
·X =
;
0 2
2 1
⎡
⎤
⎡
⎤
−1 1 1
−2 1 1
⎢
⎥
⎢
⎥
⎥
⎢
⎥
2) ⎢
⎣ 0 2 2⎦ · X = ⎣−1 0 2⎦ ;
−1 −2 0
⎡
⎤
1 10 −3
0 −1 2
⎢
⎥ ⎢
⎥
⎥ = ⎢−1 −2 −2⎥ ;
3) X · ⎢
−3
6
2
⎣
⎦ ⎣
⎦
2 6 −3
0 1 10
2 3
1 7
1 −1
4)
·X ·
=
.
−3 2
5 4
0 1
0
2 3
⎡
⎤
2.41. Считая, что a — произвольное вещественное число, выполните возведение матрицы в степень:
⎡
⎤256
1 0 0
⎢
⎥
⎢0 1 0⎥
⎣
⎦
0 a 1
.
(2.83)
92
ГЛАВА 2. АЛГЕБРА МАТРИЦ
∗ 2.42. Выполните возведение матрицы в степень:
⎡
⎤512
1 0 0
⎢
⎥
⎢ g 1 0⎥ ,
⎣
⎦
h 0 1
(2.84)
где константы g, h ∈ R.
2.43. Используя метод математической
индукции, докажите что n-я сте
0 1
пень матрицы F =
имеет вид
1 1
Fn−1 Fn
n
(2.85)
F =
Fn Fn+1
для всех натуральных значений n > 1, где Fn — числа Фибоначчи
(см. определение в упр. 2.11 на с. 86).
⎡
⎤
1 α γ
⎢
⎥
⎥
2.44. Вычислите n-ю степень верхней треугольной матрицы A = ⎢
⎣0 1 β ⎦ ,
0 0 1
где α, β, γ ∈ R.
2.45. Вычислите q-ю степень функциональной матрицы
cos ϕ sin ϕ
U (ϕ) =
− sin ϕ cos ϕ
для всех целых значений q ∈ Z.
2.46. Про матрицы A и B известно, что их коммутатор представляет
собой единичную матрицу: [A, B] = I. Вычислите [A, B q ] для всех
целых значений параметра q ∈ Z.
2.47. Вычислите значение функции f (x) = x2 − 3x + 2, если в качестве
аргумента берется матрица A, где
1 0
1) A =
;
0 1
1 −2
2) A =
.
−3 1
ГЛАВА 2. АЛГЕБРА МАТРИЦ
93
2.48. Вычислите значение функции g(x) = x3 + x − 3, если в качестве
аргумента берется матрица A, где
⎡
⎤
1 0 0
⎢
⎥
⎥
1) A = ⎢
⎣ 1 1 0⎦;
1 1 1
⎡
⎤
−2 1 0
⎢
⎥
⎥.
2) A = ⎢
3
−1
1
⎣
⎦
2 1 0
2.49. Вычислите значение дробно-рациональной функции g(A), если
x3 + x2 − 3x − 5
и
x3 − 5x − 2
⎡
⎤
2 0 0
⎢
⎥
⎥
1) A = ⎢
⎣0 −4 0⎦;
g(x) =
0
0
⎡
1
⎤
1 1 0
⎢
⎥
⎥.
2) A = ⎢
0
1
0
⎣
⎦
0 1 1
2.50. Покажите, что справедливо равенство
0 −1
cos 1 − sin 1
exp
=
.
1 0
sin 1 cos 1
2.51. Найдите eA для
⎡
⎤
1 0 0
⎢
⎥
⎥;
1) A = ⎢
0
1
0
⎣
⎦
0
⎡
0
⎢
⎢
2) A = ⎣0
0
0 0
⎤
1 0
⎥
0 1⎥
⎦.
0 0
94
ГЛАВА 2. АЛГЕБРА МАТРИЦ
∗ 2.52. Найдите eA для
⎡
⎤
1 0 1
⎢
⎥
⎥;
1) A = ⎢
0
1
0
⎣
⎦
0
⎡
1
⎢
⎢
2) A = ⎣1
0
0 1
⎤
0 1
⎥
1 1⎥
⎦.
0 1
2.53. Для матриц, заданных в предыдущем упражнении, вычислите ln A.
∗ 2.54. Докажите, что для коммутирующих матриц экспонента от суммы
равна произведению экспонент от каждого из слагаемых:
exp(A + B) = exp(A) exp(B).
2.55. Докажите, что exp(tA) = I + tA + O(t2 ) при t → 0.
2.56. Рассмотрим всевозможные матрицы размера 3 × 3, не содержащие нулевого столбца. Перечислите попарно различные ступенчатые формы таких матриц.
2.57. Какие из элементарных операций над элементами ступенчатой матрицы сохраняют ее ступенчатую форму?
2.58. Найдите ранги матриц:
⎡
⎤
⎡
2 −4
3
0
−4
1
0
⎤
1 2 −4 3 −2
⎢
⎥
⎢
⎥
⎢1 −2 1 −4 2⎥
⎢
⎥
⎢
⎥;
1) A = ⎣−1 3 −6 −2 4 ⎦ ; 2) A = ⎢
⎥
0
1
−1
3
1
⎣
⎦
2 −1 2 5 6
4 −7 4 −4 5
⎡
⎤
⎡
2
⎤
⎥
⎢
1 2 1 3
⎢−1 −4 −5 ⎥
⎢
⎥
⎥
⎢
⎢4 −1 −5 −6⎥
⎥
⎢
⎢
⎥
3) A = ⎢
; 4) A = ⎢ 3 1
7 ⎥;
⎥
⎥
⎢
⎣1 −3 −4 −7⎦
⎢ 0 5 −10⎥
⎦
⎣
2 1 −1 0
2 3
0
ГЛАВА 2. АЛГЕБРА МАТРИЦ
⎡
95
⎤
⎡
⎤
3 5 7
4 3 2 2
⎢
⎥
⎢
⎥
⎢
⎥
⎢
5) A = ⎣1 2 3⎦ ; 6) A = ⎣0 2 1 1⎥
⎦;
1 3 5
0 0 3 3
⎡
⎡
⎤
1
3
5
1 −1 2 4 3
⎢
⎢
⎥
⎢
⎥ ; 8) A = ⎢2 −1 −3
7) A = ⎢
−2
1
5
2
6
⎢5 1 −1
⎣
⎦
⎣
2 −1 4 7 2
7 7 9
−1
⎤
⎥
4⎥
⎥.
7⎥
⎦
1
2.59. С помощью метода окаймляющих миноров определите максимальное значение, которое может принимать ранг матрицы Λ:
⎡
⎤
β−γ 0
γ −β
⎢
⎥
⎥,
Λ=⎢
γ
−
α
−γ
0
α
⎣
⎦
α−β
β
−α
0
если α, β и γ — вещественные константы:
∗ 2.60. Найдите ранги следующих матриц при всех возможных значениях
вещественного параметра λ:
⎡
⎤
1 λ 0
⎢
⎥
⎥
а) ⎢
⎣ 1 1 0⎦ ;
0 0 1
⎡
⎤
1−λ
0
0
⎢
⎥
⎥;
б) ⎢
0
2
−
λ
0
⎣
⎦
0
0
3−λ
⎡
⎤
1
2
−3
⎢
⎥
⎥
в) ⎢
⎣−1 2 − λ 10 ⎦ ;
−1
0
3−λ
⎡
⎤
−λ
1
1
⎢
⎥
⎢
г) ⎣ 0 1 − λ
1 ⎥
⎦;
0
0
2−λ
96
ГЛАВА 2. АЛГЕБРА МАТРИЦ
⎡
1
−6
−5
⎤
⎢
⎥
⎥;
д) ⎢
−1
2
−
λ
5
⎣
⎦
−1
6
1−λ
⎡
⎤
1−λ
2
0
0
⎢
⎥
⎢ 1
⎥
2
−
λ
0
0
⎥;
е) ⎢
⎢ 0
0
3−λ
0 ⎥
⎣
⎦
0
0
0
4−λ
⎡
⎤
1−λ
2
0
0
⎢
⎥
⎢ 1
1+λ
0
0 ⎥
⎢
⎥;
ж) ⎢
⎥
0
0
2
−
λ
0
⎣
⎦
0
0
0
2+λ
⎡
⎤
1+λ 2
0
4
⎢
⎥
⎢ 1
1
0
0⎥
⎢
⎥;
з) ⎢
0 2 + λ −1⎥
⎣ 0
⎦
1
0
2
1
⎤
⎡
−λ
1
1
1 ...
1
1
⎥
⎢
⎢ 0 1−λ
1
1 ...
1
1 ⎥
⎥
⎢
⎢ 0
2 − λ 1 ...
1
1 ⎥
0
⎥
⎢
и) ⎢
⎥.
⎢. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .⎥
⎥
⎢
⎥
⎢
0
0
0 . . . (n − 1) − λ
1 ⎦
⎣ 0
0
0
0
0 ...
0
n−λ
Ответы и решения к главе «Алгебра матриц»
2.1. Решение.
При n = 3 имеем 3! = 1 · 2 · 3 = 6 перестановок:
k1 = 1, k2 = 2, k3 = 3; k1 = 1, k2 = 3, k3 = 2;
k1 = 2, k2 = 3, k3 = 1; k1 = 3, k2 = 1, k3 = 2;
k1 = 2, k2 = 1, k3 = 3;
k1 = 3, k2 = 2, k3 = 1.
Следовательно, сумма в det A будет состоять из 6 членов, половина из
которых берется с положительным знаком, другая половина — c отри-
ГЛАВА 2. АЛГЕБРА МАТРИЦ
97
цательным знаком:
det A =
(−1)σ a1k1 a2k2 a3k3 =
perm
= (−1)0 a11 a22 a33 + (−1)1 a11 a23 a32 + (−1)1 a12 a21 a33 +
+ (−1)2 a12 a23 a31 + (−1)2 a13 a21 a32 + (−1)3 a13 a22 a31 =
= a11 a22 a33 + a12 a23 a31 + a13 a21 a32 −
− a13 a22 a31 − a12 a21 a33 − a11 a23 a32 .
Полученная формула, конечно, согласуется с определением (2.3).
2.2. Ответ: число инверсий равно 10.
2.3. Решение.
Первый элемент перестановки, равный n, образует n − 1 инверсий в
паре с каждым из элементов n − 1, n − 2, . . . , 1. Второй элемент перестановки n − 1 образует с остальными элементами n − 2 инверсий. Как
легко видеть, элемент перестановки, равный k, где 1 k n, образует
k − 1 инверсию. Следовательно, полное число инверсий в перестановке
n
k = n(n − 1)/2.
(n, n − 1, . . . , 2, 1) равно сумме
k=1
2.4. Ответ:
n(n − 1)
;
1)
2
n(n + 1)
2)
.
2
2.5. Решение.
Слагаемому an1 an−1,2 . . . a2,n−1 a1n в формуле (2.5) приписан знак (−1)σ =
= (−1)n(n−1)/2 , поскольку число инверсий в перестановке (n, n−1, . . . , 2, 1)
равно σ = n(n − 1)/2 (см. упр. 2.3).
Примечание. С помощью функции «пол» x — наибольшего целого,
меньшего или равного аргументу x, т. е. x = max(n ∈ Z, n x), ответ
можно записать в более компактном виде: (−1)σ = (−1)n/2 .
2.6. Решение.
1) Вычислим определитель, воспользовавшись правилом треугольника для
расчета по
формуле (2.3).
3 −2 1 −2 1 3 = 3 · 1 · (−2) + (−2) · 3 · 2 + 1 · (−2) · 0 −
2 0 −2
98
ГЛАВА 2. АЛГЕБРА МАТРИЦ
−1 · 1 · 2 − (−2) · (−2) · (−2) − 3 · 3 · 0 = −12.
2)
разложение определителя по первой строке:
Выполним
1 2 0 1 3 0 3 0 1
0 1 3 = 1 −2
+0
= 1 · (1 · (−1) − 0 · 3) − 2 ·
0 −1
5 −1
5 0
5 0 −1
(0 · (−1) − 3 · 5) + 0 · (0 · 0 − 5 · 1) =
= −1 + 30 = 29.
3)
разложение определителя по первой строке:
Выполним
2 0 5 1 3 16 = 2·(3·10−(−1)·16)−0·(1·10−0·16)+5·((−1)·1−0·3) =
0 −1 10
= 92 − 5 = 87.
4) Выполним разложение определителя, например, по третьей строке:
2 −1 3
−2 3 2 = 0 · (3 · 3 − (−1) · 2) − 2 · (2 · 2 − (−2) · 3)+
0 2 5
+5 · (2 · 3 − (−2) · (−1)) = −20 + 20 = 0.
5)
определитель по первой строке:
Разложим
2 1 0 1 0 3 = 2 · (0 · (−1) − 5 · 3) − 1 · (1 · (−1) − 0 · 3) + 0 · (1 · 5 − 0 · 0) =
0 5 −1
= −30 + 1 = −29.
6) Определитель нижней треугольной матрицы вычисляем как произведение
ее
диагональных элементов:
2 0 0
3 3 0 = 2 · 3 · 4 = 24.
4 4 4
2.7. Решение.
а) Выполним разложение определителя по первой строке:
−3 0 0 0
2 2 0
2 0 0
2 0 0
2 2 0 0
1 3 −1 0 = −3 · 3 −1 0 − 0 · 1 −1 0 + 0 · 1 3 0 −
−1 5 5
5 3 5
−1 3 5
−1 5 3 5
ГЛАВА 2. АЛГЕБРА МАТРИЦ
99
2
2
0
−0 · 1 3 −1 = −3 · (−10 + 0 + 0 − 0 − 0 − 0) − 0 + 0 − 0 = 30.
−1 5 3 Заметим, что исходная матрица является нижней треугольной, значит ее определитель можно вычислить более простым способом как произведение диагональных элементов: Δ = (−3) · 2 · (−1) · 5 = 30.
б) Разложим определитель по первому столбцу:
2 −1 3 4 −1 5 −3
−1 3 4 −1 3 4 0 −1 5 −3
= 2 · 0 5 −3 − 0 · 0 5 −3 + 0 · −1 5 −3 −
0 0 5 −3
0 0 2
0 0 2
0 0 2
0 0 0 2 −1 3 4 −0 · −1 5 −3 = 2 · (−10 + 0 + 0 − 0 − 0 − 0) − 0 + 0 − 0 = −20.
0 5 −3
К результату можно прийти быстрее, заметив, что матрица является
верхней треугольной. Тогда Δ = 2 · (−1) · 5 · 2 = −20.
в) Разложим определитель по первой строке:
2 −1 1 0 0 1 −1
1 2 −1
0 2 −1
0 1 2 −1
= 2 · −1 2 3 − (−1) · 3 2 3 + 1 · 3 −1 3 −
3 −1 2 3 3 1 1 1 6 1
3 6 1 3 1 6 1 0 1 2
−0 · 3 −1 2 = 2 · (2 + 6 + 6 + 2 − 18 + 2) − (−1) · (0 + 18 − 18 + 6 − 0 − 6)+
3 1 6
+1 · (0 + 9 − 3 − 3 − 0 − 3) − 0 = 0.
100
ГЛАВА 2. АЛГЕБРА МАТРИЦ
2.8. Решение.
Обозначим определитель через Δ и разложим его по первой строке.
Полученные определители третьего порядка разложим по первой строке
или по строке,
состоящей
из единиц,
если
имеется:
таковая
x 1 1 1 1 1 1 x 1 1 x 1 Δ = x 1 x 1 − 1 x 1 + 1 1 1 − 1 1 x =
1 1 x 1 1 x 1 1 x 1 1 1 =x x(x2 − 1) − (x − 1) + (1 − x) − (x2 − 1) − (x − 1) + (1 − x) +
+ − (x2 − 1) + (x − 1) − (1 − x) − (x2 − 1) − (x − 1) + (1 − x) =
= x(x3 − 3x + 2) − 3(x2 − 2x + 1) = x(x − 1)(x2 + x − 2) − 3(x − 1)2 =
= (x − 1)(x3 + x2 − 5x + 3) = (x − 1)3 (x + 3).
В итоге, корни уравнения Δ = 0 равны x = 1 и x = −3.
2.9. Решение.
Применим к определителю следующие эквивалентные преобразования: из каждой строки, начиная со второй, вычитаем первую. В результате получим определитель верхней треугольной матрицы:
1 1 1 . . .
1
1
0 1 0 . . .
0
0
0 0 2 . . .
0
0
.
0 0 0 . . .
0
0
0 0 0 . . . p − 1 0
0 0 0 . . .
0
p
Такой определитель равен произведению диагональных элементов матрицы: 1 · 1 · 2 . . . (p − 1) · p = p!.
2.10. Решение.
а) Обозначим определитель матрицы Q через Qn и выпишем его в
явном виде:
0 1 0 0 . . . 0 0
1 0 1 0 . . . 0 0
0 1 0 1 . . . 0 0
Qn = .
. . . . . . . . . . . . . . . . . . . 0
0
0
0
.
.
.
0
1
0 0 0 0 . . . 1 0 ГЛАВА 2. АЛГЕБРА МАТРИЦ
101
Воспользуемся разложением по его первой строке, после чего полученный определитель порядка (n − 1) × (n − 1) разложим по первому
столбцу:
1 1 0 . . . 0 0
0 1 . . . 0 0
0 0 1 . . . 0 0
1 0 . . . 0 0
0 1 0 . . . 0 0
Qn = (−1)1+2 · = (−1)1+2 (−1)1+1 · . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . .
0 0 . . . 0 1
0 0 0 . . . 0 1
0 0 . . . 1 0
0 0 0 . . . 1 0
Заметим, что задача свелась к вычислению величины Qn−2 . Для наименьших возможных значений порядка матрицы n = 1 и n = 2 имеем
0 1
= −1.
Q1 = det[0] = 0, Q2 = det
1 0
Таким образом, получается рекуррентное соотношение:
Qn = −Qn−2 ,
Q1 = 0, Q2 = −1.
Методом математической индукции можно показать, что его решение
Qn будет иметь вид:
(−1)n/2 , если n четно,
Qn =
0,
если n нечетно.
б) Используя метод Лапласа, аналогично пункту a) получим рекуррентное соотношение:
Qn = Qn−2 ,
Q1 = 0, Q2 = 1.
Его решение, как легко показать с помощью метода математической
индукции, имеет вид:
1
Qn = 1 + (−1)n .
2
102
ГЛАВА 2. АЛГЕБРА МАТРИЦ
2.11. Решение.
Обозначим через P (n) предикат «Fn+1 = D(n)», где D(n) — определитель (2.73). Воспользуемся методом математической индукции.
База индукции
Для n = 1 и n = 2 имеем:
1
1
0
1 1
F2 = — верно, F3 = −1 1 1 — верно.
−1 1
0 −1 1
Шаг индукции
Предположим истинность утверждений P (k) для k = 1, 2, . . . .
Докажем, что это влечет истинность P (k + 1).
В самом деле, разлагая определитель D(n + 1) по первой строке,
получим:
Dn+1 = Dn + Dn−1 .
Согласно индуктивному предположению D(n) = Fn+1 , D(n−1) = Fn .
Следовательно, получено верное равенство Fn+2 = Fn+1 + Fn .
Таким образом, методом математической индукции доказано, что
Fn+1 = D(n) для всех натуральных n.
2.12. Решение.
1) Согласно определению (2.74) при n = 2 имеем
1 1
Vn = = a 2 − a1 .
a1 a2 2) Введем в рассмотрение предикат «Vn =
(aj −ai )» и обозначим
i,j∈[1,n]
i<j
его через P (n).
База индукции
Случай наименьшего n = 2 доказан в пункте 1) данного упражнения.
Шаг индукции
Пусть
для некоторого натурального k 2 выполняется равенство
(aj − ai ).
Vk =
i,j∈[1,k]
i<j
Докажем, что Vk+1 =
i,j∈[1,k+1]
i<j
(aj − ai ).
ГЛАВА 2. АЛГЕБРА МАТРИЦ
103
Преобразуем Vk+1 следующим образом: из (k + 1)-й строки вычитаем
k-ю, умноженную на a1 , затем из k-й вычитаем (k − 1)-ю, также умноженную на a1 и так вплоть до второй строки включительно:
1
1
...
1
1
0
−
a
a
−
a
.
.
.
a
−
a
a
2
1
3
1
k+1
1
Vk+1 = 0 a22 − a1 a2
a23 − a1 a3 . . . a2k+1 − a1 ak+1 .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . k−1
k−1
k−1
k
k
k
0 a2 − a1 a2
a3 − a1 a3
. . . ak+1 − a1 ak+1 Первый столбец полученного определителя образован нулями, за исключением элемента в левом верхнем углу, равного единице. Используя
этот факт, легко выполнить разложение по первому столбцу. После вынесения общих множителей за знак определителя имеем:
1 ... 1 1
a2
a3 . . . ak+1 Vk+1 = (a2 − a1 )(a3 − a1 ) . . . (ak+1 − a1 ) a22
a23 . . . a2k+1 .
. . . . . . . . . . . . . . . . . . . .
k−1 k−1
k−1 a2
a3
. . . ak+1
В результате получен определитель Vk , который по индуктивному
предположению равен произведению всевозможных разностей aj −ai для
1 i < j k.
Следовательно, методом математической индукции доказана формула (2.75).
Примечание. Матрица Вандермонда, т. е. матрица вида
1
1
.
.
.
1
a1
a
.
.
.
a
2
n
2
a1
a22 . . . a2n ,
. . . . . . . . . . . . . . . . . . . .
n−1 n−1
n−1
a1
a2
. . . an часто встречается в теории приближений функций полиномами [41, 70].
104
ГЛАВА 2. АЛГЕБРА МАТРИЦ
2.13. Решение.
При умножении любой строки на вещественное число определитель
этой матрицы умножается на это число. Следовательно, при умножении
всех элементов матрицы A на m определитель умножится на величину
m×m×
!". . . × m# .
n раз
Таким образом, для всех m ∈ N выполняется равенство det(mA) =
= mn det A.
2.14. Решение.
Студент не прав. Определитель суммы двух матриц не всегда равен
сумме определителей этих матриц, что подтверждает следующий контрпример.
Рассмотрим единичную матрицу размера n × n. Тогда выполняется
неравенство:
det(I + I) = det I + det I,
поскольку det(I + I) = det(2I) = 2n (см. упр. 2.13). В то же время,
det I + det I = 1 + 1 = 2 = det(I + I).
2.15. Решение.
Разложение определителя по формуле (2.5) содержит 5! = 120 слагаемых. Одно из этих слагаемых вида a15 a21 a34 a42 a53 имеет в своем составе
все пять множителей величиной 10000 и равно (−1)σ 100005 = (−1)σ 1020 .
Здесь σ — число инверсий в перестановке (5, 1, 4, 2, 3). Как легко заметить, σ = 6.
Оставшиеся 5!−1 = 119 слагаемых содержат в своем составе не более
трех сомножителей 10000 и, следовательно, не превышают по абсолютной величине 100003 × 1 × 1 = 1012 . Отсюда можно сделать вывод, что
рассматриваемый определитель не меньше разности 1020 − 119 · 1012 > 0.
В итоге, определитель положителен.
2.16. Решение.
Опираясь на рассуждения, аналогичные приведенным в решении
упр. 2.15, получаем: определитель в данном случае не превышает значение
(−1020 + 119 · 4 · 5 · 1012 ) < 0.
Следовательно, этот определитель является отрицательным числом.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
105
2.17. Ответ:
Вычисление определителей с помощью Python приводит к следующим результатам:
1
1
1 104 1
104 1
1
1
1 1
1
1 104 1 = 99999990001999850004,
1 104 1
1
1
1
1 1 104 1
4
3
4
5 1 10
4
5
1
2
3
10
4
5
1 104 3 = −99999909053183731167.
3
2 4 104 1
4
10
3
4
5
1 Эти результаты, разумеется, согласуются с решениями упр. 2.15 и 2.16.
2.18. Решение.
Напомним, что в комбинаторике число сочетаний из n различных
элементов по k без повторений обозначается как C(n, k) [1, 52].
Чтобы сформировать минор k-го порядка, нужно выбрать из матрицы k строк и k столбцов. Строки можно выбрать C(m, k) способами, а
столбцы — C(n, k) способами. Применяя комбинаторное правило произведения, получаем, что всего можно получить C(m, k)C(n, k) миноров
k-го порядка.
2.19. Ответ:
Строки для формирования минора можно выбрать, используя число сочетаний, C(n, k) способами. Далее столбцы следует выбирать так,
чтобы их номера не совпадали с номерами выбранных строк. Это можно сделать C(n − k, k) способами. Итого по комбинаторному правилу
произведения получаем ответ: C(n, k)C(n − k, k) миноров.
2.20. Решение.
Рассмотрим матрицу A размера 3 × 3
⎤
⎡
a a a
⎢ 11 12 13 ⎥
⎢
A = ⎣a21 a22 a23 ⎥
⎦
a31 a32 a33
106
ГЛАВА 2. АЛГЕБРА МАТРИЦ
и запишем ее определитель в виде
det A = a11 a22 a33 + a12 a23 a31 + a13 a21 a32 −
− a11 a23 a32 − a12 a21 a33 − a13 a22 a31 =
=α+β+γ+
+ δ + ε + ζ,
где введены обозначения α = a11 a22 a33 , β = a12 a23 a31 , . . . , ζ = −a13 a22 a31 .
Каждая из величин α, β, . . . , ζ принимает значения из множества {−1, 1}.
Все шесть слагаемых определителя не могут иметь одинаковый знак.
В самом деле, произведение αβγ можно представить в виде произведения
девяти элементов матрицы A:
αβγ =
3
$
aij .
i,j=1
В то же время имеет место равенство δεζ = (−1)3 3i,j=1 aij = −αβγ.
Следовательно, среди α, β, . . . , ζ есть отрицательные слагаемые, и
det A < 6.
Если пять членов определителя имеют один знак, а шестой — другой,
то det A является четным числом. Значит, det A < 5.
Как несложно установить прямым вычислением, матрица
⎡
⎤
−1 1 1
⎢
⎥
⎢ 1 −1 1⎥
⎣
⎦
1 1 −1
имеет det A = 4.
Окончательно получаем: наибольшее значение определителя матрицы размера 3 × 3, состоящей из элементов +1 и −1, равно 4.
2.21. Ответ: 2.
2.22. Ответ: определитель умножится на (−1)n/2 .
2.23. Решение.
# The number of multiplications
count = 0
ГЛАВА 2. АЛГЕБРА МАТРИЦ
107
def get_determ(A):
global count
size = len(A)
if size == 1:
return A[0][0]
elif size == 2:
count += 2
return A[0][0] * A[1][1] - A[0][1] * A[1][0]
else:
det = 0
# Expansion over the first row
for col in range(size):
minor = [row[:col] + row[col + 1:] for row \
in (A[1:])]
det_sign = 1 if col % 2 == 0 else -1
det += det_sign * A[0][col] * get_determ(minor)
count += 1
return det
mas = [[1, 2, 3], [4, 5, 6], [7, 8, 9]]
print("det =", get_determ(mas))
print("count =", count)
2.24. Решение.
Для матрицы размера n×n осуществляется n рекурсивных вызовов и
производится n умножений вида aij ×Aij , j = 1, . . . , n. Выход из рекурсии
будет при n = 1, в этом случае умножения не выполняются. В силу этого
общее число умножений удовлетворяет рекуррентному соотношению:
T (n) = nT (n − 1) + n, n > 1,
T (1) = 0.
Решим полученное соотношение методом подстановки, т. е. последовательно выражая T (n − 1) через T (n − 2), затем T (n − 2) через T (n − 3),
108
ГЛАВА 2. АЛГЕБРА МАТРИЦ
и т. д.:
T (n) = nT (n − 1) + n =
= n[(n − 1)T (n − 2) + n − 1] + n =
= n(n − 1)T (n − 2) + n(n − 1) + n =
= n(n − 1)[(n − 2)T (n − 3) + n − 2] + n(n − 1) + n =
= n(n − 1)(n − 2)T (n − 3) + n(n − 1)(n − 2) + n(n − 1) + n.
Продолжая аналогичным образом этот процесс до T (1) = 0, получим:
T (n) = n(n − 1)(n − 2) . . . 2 · T (1) +
+ n(n − 1)(n − 2) . . . 2 + n(n − 1)(n − 2) . . . 3 + . . . + n(n − 1) + n =
n!
n!
n!
+
=
= 0 + n! + + . . . +
2!
(n − 2)! (n − 1)!
(
)
n−1
1
1
1
1
= n! 1 + + . . . +
+
= n!
.
2!
(n − 2)! (n − 1)!
k!
k=1
Имеется возможность записать аналитическое выражение для T (n)
через неэлементарные функции, однако для решения поставленной задачи достаточно оценить асимптотическое поведение функции T (n).
Заметим, что при n → ∞
n−1
∞
∞
1
1
1
− 1 = e − 1,
=
=
n→∞
k!
k!
k!
lim
k=1
k=1
k=0
где e = 2,71828 . . . — основание натуральных логарифмов. Отсюда получаем неравенство
n! n!
n−1
1
(e − 1)n!,
k!
k=1
и, окончательно, T (n) = O(n!).
2.25. Решение.
n−1
1
.
k!
k=1
Раскроем выражение enΓ(n, 1) − n!, учитывая определение неполной
гамма-функции:
Согласно результату предыдущего упражнения, T (n) = n!
enΓ(n, 1) − n! = en · (n − 1)! e−1
n−1 k
1
k=0
k!
− n! = n!
n−1
n−1
1
1
− n! = n!
,
k!
k!
k=0
k=1
ГЛАВА 2. АЛГЕБРА МАТРИЦ
109
что совпадает с T (n).
2.26. Решение.
Определим, сколько всего инверсий S(N ) содержится во всех перестаS(N )
будет равно среднему значению
новках N элементов. Отношение
N!
числа инверсий A(N ) в N -элементном массиве.
Для вычисления величины S(N ) предположим, что в некоторой перестановке (ai1 , ai2 , . . . , ain−1 , ain ) содержится ровно σ инверсий.
Заметим, что в перестановке (ain , ain−1 , . . . , ai2 , ai1 ) число инверсий
N (N − 1)
равно
− σ. Это означает, что суммарное число инверсий в
2
паре массивов
(ai1 , ai2 , . . . , ain−1 , ain ) и (ain , ain−1 , . . . , ai2 , ai1 )
' N (N − 1)
& N (N − 1)
−σ =
.
равно σ +
2
2
Поскольку существует всего N ! перестановок N -элементного масси1
N (N − 1)
ва, то S(N ) = N ! ×
, и, следовательно, имеет место следую2
2
щая оценка для среднего значения числа инверсий:
A(N ) =
S(N ) 1 2
= N + O(N ) при N → ∞.
N!
4
2.27. Доказательство.
Обозначим элементы матрицы B через bij , 1 i, j n. С помощью
введенного обозначения можно записать, что матрица I + εB образована
элементами (δij + εbij ).
Согласно определению, величина det(I + εB) равна сумме по всем
возможным перестановкам:
(−1)σ (δ1i1 + εb1i1 )(δ2i2 + εb2i2 ) . . . (δnin + εbnin ).
det(I + εB) =
perm
Раскрывая скобки под знаком суммы, получим:
(−1)σ (δ1i1 δ2i2 . . . δnin +
det(I + εB) =
perm
+ εb1i1 δ2i2 δ3i3 . . . δnin +
+ εb2i2 δ1i1 δ3i3 . . . δnin +
+ εb3i3 δ1i1 δ2i2 . . . δnin + . . . +
+ εbnin δ1i1 δ2i2 . . . δ(n−1)in−1 +
+ ε2 (. . . ) + . . . ).
110
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Произведение δ1i1 δ2i2 . . . δnin равно единице, если i1 = 1, i2 = 2, . . . ,
in = n, и равно нулю в остальных случаях.
Далее, произведения вида
εbkik δ1i1 δ2i2 . . . δ(k−1)ik−1 δ(k+1)ik+1 . . . δnin
сводятся к слагаемым εbkk .
Из этого следует, что
det(I + εB) = (−1)σ0 1 + εb11 + εb22 + . . . + εbnn + O(ε2 ) ,
где σ0 — количество инверсий в перестановке (i1 , i2 , . . . , in ) = (1, 2, . . . , n).
Ясно, что σ0 = 0.
В итоге получаем:
n
&
'
2
bkk + O(ε ) = 1 + ε tr B + O(ε2 ).
det(I + εB) = (−1) 1 + ε
σ0
k=1
I
2.28. Ответ: det
(I + εB)p
= 1 − pε(tr B) + O(ε2 ).
2.29. Доказательство.
Представим матрицу M в виде M = G(I + εG−1 H). Вычислим определитель
detM = det G det(I + εG−1 H) =
∞
& '
(−1)k−1
= det G exp(tr ln(I + εG−1 H)) = det G exp tr
(εG−1 H)k =
k
k=1
1
= det G 1 + εtr (G−1 H) + ε2 (tr2 (G−1 H) − tr (G−1 H)2 ) + O(ε3 ) .
2
Таким образом, формула (2.80) доказана.
2.30. Решение.
Определитель матрицы равен det A = ad − bc.
Вычислим алгебраические дополнения для каждого из элементов матрицы A:
A11 = (−1)1+1 · d = d, A12 = (−1)1+2 · c = −c;
A21 = (−1)2+1 · b = −b, A22 = (−1)2+2 · a = a.
Запишем матрицу из алгебраических дополнений:
d −c
.
−b a
ГЛАВА 2. АЛГЕБРА МАТРИЦ
111
Тогда искомая обратная матрица будет иметь вид:
d
−b
1
A−1 =
.
ad − bc −c a
2.31. Решение.
1) Поскольку det A = −2 = 0, то обратная матрица существует.
Находим алгебраические дополнения элементов матрицы A:
A12 = −3,
A22 = 1.
A11 = 4,
A21 = −2,
Следовательно,
матрицу алгебраических дополнений можно записать
4 −3
в виде:
.
−2 1
T 4 −3
4 −2
=
.
Транспонируем матрицу (Aij ):
−2 1
−3 1
матрицу на
Для вычисления A−1 делимполученную
присоединенную
4 −2
−2
1
/(−2) =
определитель: A−1 =
.
−3 1
3/2 −1/2
2) Поскольку det A = 1 = 0, то обратная матрица существует. Находим алгебраические дополнения элементов матрицы A:
A11 = 7, A12 = −5,
A21 = −4, A22 = 3.
7
−5
T
7
−4
Транспонируем матрицу (Aij ):
=
.
−4 3
−5 3
7
−4
7
−4
1
Следовательно, A−1 =
=
.
det A −5 3
−5 3
3) Вычисляем определитель методом разложения по первому столбцу:
−3 1 −4 5 −4 5
det A = 3 − 2
+ 3
= 24 − 58 + 33 = −1 = 0.
−5 −1
−5 −1
−3 1
Находим алгебраические дополнения:
112
ГЛАВА 2. АЛГЕБРА МАТРИЦ
−3 1 A11 = = 8, A12 = 5, A13 = −1,
−5 −1
A21 = −29, A22 = −18, A23 = 3,
A31 = 11, A32 = 7, A33 = −1.
⎡
⎤
8
5 −1
⎢
⎥
⎢
Получим матрицу алгебраических дополнений: ⎣−29 −18 3 ⎥
⎦.
11
7 −1
Выполним операцию транспонирования:
⎡
⎤T ⎡
⎤
8 −29 11
8
5 −1
⎢
⎢
⎥
⎥
⎢−29 −18 3 ⎥ = ⎢ 5 −18 7 ⎥ .
⎣
⎣
⎦
⎦
11
7
−1
−1
3
−1
С помощью операции деления на det A запишем обратную матрицу:
⎡
⎤ ⎡
⎤
8 −29 11
−8 29 −11
⎥ ⎢
⎥
1 ⎢
−1
⎢
⎥
⎢
⎥.
=
A =
5
−18
7
−5
18
−7
⎦ ⎣
⎦
det A ⎣
1 −3 1
−1 3 −1
4) Поскольку det A = −3 = 0, то A−1 определена. Находим алгебраические дополнения Aij :
A11 = 7, A12 = −5, A13 = 6,
A21 = −6, A22 = 3, A23 = −3,
A31 = 1, A32 = 1, A33 = −3.
⎤
⎡
⎤ ⎡ 7
1
−
2
−
7 −6 1
3⎥
⎥ ⎢ 53
1 ⎢
1⎥
−1
⎢−5 3 1 ⎥ = ⎢
.
Обратная матрица A =
⎢
−1 − ⎥
⎦ ⎣
det A ⎣
3
3⎦
6 −3 −3
−2 1
1
5) Находим определитель: det A = −27 = 0. Алгебраические дополнения равны
A11 = −3, A12 = −6, A13 = −6,
A21 = −6, A22 = −3, A23 = 6,
A31 = −6, A32 = 6, A33 = −3.
Вычисляем элементы обратной матрицы:
⎡
⎤
⎡
⎤
−3 −6 −6
1 2 2
⎥ 1⎢
⎥
1 ⎢
−1
⎢
⎥
⎢
⎥.
=
A =
−6
−3
6
2
1
−2
⎦ 9⎣
⎦
det A ⎣
−6 6 −3
2 −2 1
ГЛАВА 2. АЛГЕБРА МАТРИЦ
113
2.32. Ответ:
⎡
⎤
⎡
1
⎢
⎤
⎢
⎢1 − 2 0 ⎥
1
⎢0
⎥
⎢
1
−
⎢
1
1⎥
⎢
⎥
⎢
2
1) ⎣
− ⎥ ; 3) ⎢
0
⎢
1 ⎦ ; 2) ⎢
⎢
2
3⎥
⎢0
0
⎦
⎣
⎢
1
2
⎣
0 0
3
0
⎡
⎤
1
0
0
⎥
2
⎥
1
1
−
0 ⎥
⎥
2
3
⎥.
1
1⎥
0
− ⎥
3
4⎥
1 ⎦
0
0
4
1 −
2.33. Ответ: [A, A−1 ] = [A−1 , A] = O.
2.34. Решение.
1) Как известно, матрица A не имеет обратной при выполнении условия det A = 0.
−1 λ λ
Вычислим определитель: λ λ 0 = −λ3 − 3λ2 = −λ2 (λ + 3).
6 4 λ
Следовательно, матрица не имеет обратной при λ ∈ {0, −3}.
2) Определитель равен −λ3 + 3λ2 + λ − 3 = −(λ − 3)(λ − 1)(λ + 1).
Матрица не имеет обратной при λ ∈ {−1, 1, 3}.
2.35. Решение.
Для нахождения обратной матрицы вычислим определитель det A.
1
0
det A = 0
0
α 0 0 1 β 0 ,
0 1 γ 0 0 1
det A = 1, поскольку A — верхняя треугольная матрица и определитель
равен произведению диагональных элементов.
Находим алгебраические дополнения:
A11 = 1, A12 = 0, A13 = 0, A14 = 0,
A21 = −α, A22 = 1, A23 = 0, A24 = 0,
A31 = αβ, A32 = −β, A33 = 1, A34 = 0,
A41 = −αβγ, A42 = βγ, A43 = −γ, A44 = 1.
114
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Выполняем транспонирование и получаем присоединенную матрицу:
⎡
⎤
⎤T ⎡
1 −α αβ −αβγ
1
0
0 0
⎢
⎢
⎥
⎥
⎢0 1 −β βγ ⎥
⎢ −α
⎥
1
0
0
⎢
⎢
⎥.
⎥
⎢ αβ −β 1 0⎥ = ⎢0 0
1
−γ ⎥
⎣
⎣
⎦
⎦
0 0
0
1
−αβγ βγ −γ 1
Поскольку определитель равен единице, то A−1 совпадает с присоединенной матрицей:
⎡
⎤
1 −α αβ −αβγ
⎢
⎥
⎢0 1 −β βγ ⎥
−1
⎥.
A =⎢
⎢0 0
1
−γ ⎥
⎣
⎦
0 0
0
1
Как показано выше, определитель det A не зависит от параметров
α, β, γ, следовательно, матрица A−1 определена при любых значениях
α, β, γ ∈ R.
2.36. Решение.
Определитель матрицы Gn = (gij ) равен det Gn = (−1)n(n−1)/2 , поскольку единственное ненулевое произведение в сумме вида (2.5) равно
g1,n g2,n−1 . . . gn,1 = 1, а множитель σ для этого произведения принимает
значение σ = (−1)n(n−1)/2 (см. упр. 2.5).
Построим матрицу алгебраических дополнений элементов gij , где 1 i, j n. Алгебраическое дополнение любого элемента, равного нулю,
будет равно нулю. Это следует из того, что при вычеркивании нулевого
элемента в соответствующем миноре появляется нулевая строка и нулевой столбец, и, в свою очередь, такой минор равен нулю. Минор любого
элемента gi,(n+1)−i , расположенного на побочной диагонали, будет равен
det Gn−1 = (−1)(n−1)(n−2)/2 , т. к. при вычеркивании gi,(n+1)−i будет получаться матрица Gn−1 размера (n − 1) × (n − 1).
Следовательно, алгебраические дополнения таких элементов gi,n−i
равны
(−1)i+(n+1−i) · det Gn−1 = (−1)n+1 · (−1)(n−1)(n−2)/2 =
= (−1)n(n−1)/2+2 = (−1)n(n−1)/2 .
Таким образом, матрица алгебраических дополнений равна исходной
Gn , умноженной на (−1)n(n−1)/2 .
ГЛАВА 2. АЛГЕБРА МАТРИЦ
115
Как легко видеть, транспонирование не меняет полученной матрицы. Последний шаг — делим присоединенную матрицу на определитель
det Gn = (−1)n(n−1)/2 . Окончательно получаем, что матрица, обратная к
G, совпадает с ней самой: G−1 ≡ G для всех значений n 2.
2.37. Решение.
Приведем код на Python для решения задачи.
import numpy as np
def get_Hilbert_matrix(n):
return np.matrix([[ 1 / (i + j - 1)
for j in range(1, n + 1)] for i in range(1, n + 1)])
matrix = get_Hilbert_matrix(6)
inversed = np.linalg.inv(matrix)
hh1 = np.matmul(matrix, inversed)
h1h = np.matmul(inversed, matrix)
print(matrix)
print(inversed)
print(hh1)
print(h1h)
Отличие вычисленных с помощью Python элементов матриц H · H −1
и H −1 · H от единичной матрицы составляет ∼ 10−10 для n = 6, ∼ 10−7
для n = 8 и ∼ 10−8 для n = 7. (Символ ∼ здесь означает равенство по
порядку величины.)
Таким образом, матрицы Гильберта демонстрируют накопление машинных ошибок [70] при выполнении вычислений над вещественными
числами. Эти матрицы очень часто используются для тестирования численных алгоритмов.
Матрицу H −1 можно найти в явном виде, аналитические представления для hij приведены в [61]. Интересной особенностью этой задачи
является также то, что элементы обратной матрицы являются целыми
числами.
2.38. Решение.
Данная матрица является верхней треугольной, и ее определитель
равен произведению элементов, расположенных на главной диагонали,
т. е. равен единице.
116
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Построим матрицу алгебраических дополнений. Алгебраические дополнения всех единичных элементов, расположенных на главной диагонали, будут равны единице. При вычеркивании всех нулей, кроме тех,
что стоят на диагонали под главной, появляются матрицы с пропорциональными строками, следовательно, их миноры будут равны нулю. Те
нули, что находятся на диагонали ниже главной, будут иметь в качестве алгебраических дополнений величины (−λ). Сумма i + j для таких
элементов всегда нечетна, так как они стоят под главной диагональю,
а при их вычеркивании получаем верхнюю треугольную матрицу с одним элементом λ и остальными единицами на главной диагонали. При
вычеркивании λ любой степени, кроме нулевой, мы получаем верхнюю
треугольную матрицу с нулями и единицами на главной диагонали. Следовательно, и минор, и алгебраическое дополнение в этом случае равны
нулю.
Наконец, выполняя операцию транспонирования, получаем обратную
матрицу:
⎡
⎤
1 −λ 0
0 ... 0
⎢
⎥
⎢0 1 −λ 0 . . . 0⎥
⎢
⎥
⎢
⎥
⎢0 0
1 −λ . . . 0⎥ .
⎢
⎥
⎢. . . . . . . . . . . . . . . . . . . . . .⎥
⎣
⎦
0 0
0
0 ... 1
2.39. Решение.
Воспользуемся методом математической индукции.
База индукции
Для наименьшего натурального n = 1 имеем:
(A1 )−1 = A1−1 — верно.
Шаг индукции
Предположим, что для n = k справедливо равенство:
−1
−1 −1
(A1 A2 . . . Ak−1 Ak )−1 = A−1
k Ak−1 . . . A2 A1 .
Тогда нужно доказать, что для n = k + 1 верно следующее:
−1
−1 −1
(A1 A2 . . . Ak+1−1 Ak+1 )−1 = A−1
k+1 Ak+1−1 . . . A2 A1 .
−1
Обозначим выражение для A−1
k . . . A1 через B, тогда:
−1
−1 −1
−1
(BAk+1 )−1 = A−1
= A−1
k+1 B
k+1 (Ak Ak−1 . . . A1 ).
ГЛАВА 2. АЛГЕБРА МАТРИЦ
117
Следовательно, согласно методу математической индукции ∀n ∈ N,
справедливо тождество
−1
−1 −1
(A1 A2 . . . An−1 An )−1 = A−1
n An−1 . . . A2 A1 .
2.40. Решение.
1) Найдем матрицу, обратную к матрице A =
2 1
.
0 2
Ее определитель равен
дополне
detA = 4, матрица алгебраических
1/2
−1/4
2 0
.
ний имеет компоненты
, обратная матрица: A−1 =
0
1/2
−1 2
−6
4
:
Матрицу X получим, умножив A−1 на матрицу B =
2 1
1/2 −1/4
−6 4
−7/2 7/4
1 −14 7
X=
.
·
=
=
4 4 2
0
1/2
2 1
1
1/2
⎡
⎤
−1 1 1
⎢
⎥
⎢
2) Найдем матрицу, обратную к матрице A = ⎣ 0 2 2⎥
⎦.
0 2 3
Определитель равен det A = −2.
−1
Обратная
⎡ матрица A⎤ :
−1 1/2 0
⎢
⎥
⎥.
A−1 = ⎢
0
3/2
−1
⎣
⎦
0 −1 1
Умножим
матрицу,
⎡
⎤ обратную к матрице A, на матрицу
−2 1 1
⎢
⎥
⎢
B = ⎣−1 0 2⎥
⎦:
−1 −2 0
⎡
⎤⎡
⎤
⎡
⎤
3 −2 0
−1 1/2 0
−2 1 1
⎢
⎥⎢
⎥ 1⎢
⎥
⎢
⎥
⎢
⎥
⎢
X = A B = ⎣ 0 3/2 −1⎦ ⎣−1 0 2⎦ = ⎣−1 4 6 ⎥
⎦.
2
0 −4 −4
−1 −2 0
0 −1 1
−1
3) Решение уравнения получим, умножив обе части уравнения
X · A = B на A−1 справа.
118
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Для этого найдем матрицу, обратную к
⎡
−30 12
1 ⎢
−1
⎢ −5 3
A =
10 ⎣
−30 14
Вычисляем элементы неизвестной
⎡
⎡
⎤
−30 12
0 −1 2
⎢
⎥ 1 ⎢
⎢
⎢
⎥
X = ⎣−1 −2 −2⎦ ·
−5 3
10 ⎣
−30 14
0 1 10
матрице A:
⎤
38
⎥
7⎥
⎦.
36
матрицы X = B · A−1 :
⎤
⎡
⎤
38
−55 25
65
⎥
⎥
1 ⎢
⎥
⎢
⎥.
7⎦=
100
−46
−124
⎦
10 ⎣
36
−305 143 367
4) Из уравнения A · X · B = C неизвестную матрицу X находим по
формуле X = A−1 · C · B −1 .
Имеем:
2
−3
−4
7
1
1
A−1 =
, B −1 =
.
13 3 2
31 5 −1
Последовательно выполняем умножения в следующем порядке:
(A−1 · C) · B −1 .
Умножим матрицу, обратную к матрице A, на матрицу C:
2
−3
2
−5
1
−1
1
1
A−1 C =
.
=
13 3 2
13 3 −1
0 1
Наконец, умножим произведение A−1 C на матрицу, обратную матрице B:
1 2 −5
1 −33 19
1 −4 7
X=
·
=
.
13 3 −1 31 5 −1
403 −17 22
⎡
⎤
1 0 0
⎢
⎥
⎥
2.41. Ответ: ⎢
⎣0 1 0⎦.
0 256a 1
2.42. Решение.
вторую, третью,
Вычислив несколько первых степеней A⎡k , а именно,
⎤
1 0 0
⎢
⎥
⎢
четвертую и пятую степени матрицы A = ⎣g 1 1⎥
⎦, имеем:
h 0 1
ГЛАВА 2. АЛГЕБРА МАТРИЦ
119
⎡
⎤
0 0
⎢
⎥
⎥
A2 = ⎢
⎣2g + h 1 2⎦ ,
2h
0 1
⎡
1
⎤
1
0 0
⎢
⎥
⎥
A3 = ⎢
⎣3g + 3h 1 3⎦ ,
3h
0 1
⎡
⎤
0 0
⎢
⎥
⎥
A4 = ⎢
⎣4g + 6h 1 4⎦ ,
4h
0 1
⎡
⎤
0 0
⎢
⎥
⎥
A5 = ⎢
⎣5g + 10h 1 5⎦ .
5h
0 1
1
1
На основании полученных равенств предположим, что для всех натуральных значений n выполняется тождество:
⎡
1
0 0
⎤n
⎢
⎥
⎥ ,
An = ⎢
ng
+
n(n
−
1)h/2
1
n
⎣
⎦
nh
0 1
соответствующий предикат обозначим через P (n).
Воспользуемся методом математической индукции.
Б а з а⎡ и н д у к ц и и
⎤
1
0 0
⎢
⎥
⎥ = A — верно.
A =⎢
1
·
g
+
1(1
−
1)h/2
1
1
⎣
⎦
1·h
0 1
Шаг индукции
Пусть при n = k предикат P (n) принимает истинное значение, тогда:
1
⎡
⎤
1
0 0
⎢
⎥
⎢
A = ⎣kg + k(k − 1)h/2 1 k ⎥
⎦.
kh
0 1
k
Докажем, что при n = k + 1 справедливо равенство:
⎡
A
k+1
⎤
1
0
0
⎢
⎥
⎢
= ⎣(k + 1)g + k(k + 1)h/2 1 k + 1⎥
⎦.
(k + 1)h
0
1
120
ГЛАВА 2. АЛГЕБРА МАТРИЦ
В самом деле,
⎡
⎤⎡
1
0 0
⎤
1 0 0
⎢
⎥⎢
⎥
⎥⎢
⎥
Ak+1 = ⎢
⎣kg + k(k − 1)h/2 1 k ⎦ ⎣g 1 1⎦ =
kh
0 1
h 0 1
⎡
⎤
1
0
0
⎢
⎥
⎥.
=⎢
(k
+
1)g
+
k(k
+
1)h/2
1
k
+
1
⎣
⎦
(k + 1)h
0
1
Таким образом, предикат P (n) доказан для всех n ∈ N.
Подставляя в качестве
число n = 512,
⎡ показателя степени матрицы
⎤
1
0 0
⎢
⎥
⎥.
получаем ответ: A512 = ⎢
256(2g
+
511h)
1
512
⎣
⎦
512h
2.43. Решение.
Обозначим через P (n) предикат F n =
0
1
Fn−1
Fn
Fn
Fn+1
.
База индукции
Базу индукции составляет утверждение P (2):
0 1 0 1
1 1
F 1 F2
,
=
=
F2 F3
1 1 1 1
1 2
что соответствует формуле (2.85).
Шаг индукции
Предположим,
что
при n = k утверждение верно:
Fk−1 Fk
.
Fk =
Fk Fk+1
Вычислим матрицу F n для n = k + 1:
F
F
F
+
F
0
1
F
k−1
k
k
k−1
k
.
F k+1 =
=
Fk Fk+1 1 1
Fk+1 Fk + Fk+1
Согласно определению последовательности Фибоначчи каждый член
этой последовательности равен сумме двух предыдущих, и для всех k > 1
справедливо тождество Fk−1 + Fk = Fk+1 .
Таким образом, предикат P (n) доказан для всех натуральных n > 1.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
121
2.44. Решение.
Попробуем найти закономерность в последовательности A1 , A2 , A3 ,
. . . Для этого возведем матрицу во вторую, третью и четвертую степени:
⎡
⎤⎡
⎤
⎡
⎤
1 α γ
1 α γ
1 2α 2γ + αβ
⎢
⎥⎢
⎥ ⎢
⎥
⎢
⎥
⎢
⎥
⎢
A = ⎣0 1 β ⎦ ⎣0 1 β ⎦ = ⎣ 0 1
2β ⎥
⎦,
0 0 1
0 0 1
0 0
1
2
⎡
⎤⎡
1 2α 2γ + αβ
⎢
A3 = A2 · A = ⎢
⎣0
1
2β
0
0
1
⎤
⎤⎡
1 3α 3γ + 3αβ
1
3β
0
0
1
⎤
1 3α 3γ + 3αβ
⎥⎢
⎥ ⎢
⎥ ⎢0 1 β ⎥ = ⎢0
⎦⎣
⎦ ⎣
0 0 1
0
⎡
⎢
A 4 = A3 · A = ⎢
⎣0
⎡
1 α γ
⎤
1
3β
0
1
⎥
⎥,
⎦
⎡
1 α γ
⎤
1 4α 4γ + 6αβ
⎥⎢
⎥ ⎢
⎥ ⎢0 1 β ⎥ = ⎢0
⎦⎣
⎦ ⎣
0 0 1
0
1
4β
0
1
⎥
⎥.
⎦
1
, A2 , A3 , . . . приводит к гипоАнализ последовательности
степеней A⎤
⎡
1 nα nγ + n(n − 1)αβ/2
⎢
⎥
⎥.
тезе, что An = ⎢
0
1
nβ
⎣
⎦
0 0
1
Докажем справедливость этого предположения с помощью метода
математической индукции.
⎡
⎤
1 nα nγ + n(n − 1)αβ/2
⎢
⎥
n
⎢
⎥».
Обозначим через P (n) утверждение «A = ⎣0 1
nβ
⎦
0
0
1
База индукции
Истинность утверждения P (1) очевидна.
Шаг индукции
Предположим,
что P (n) справедливо
при n = k для некоторого k 1:
⎡
⎤
1 kα kγ + k(k − 1)αβ/2
⎢
⎥
k
⎢
⎥.
A = ⎣0 1
kβ
⎦
0 0
1
Докажем, что P (k) ⇒ P (k + 1).
122
ГЛАВА 2. АЛГЕБРА МАТРИЦ
⎡
⎤⎡
⎤
1 kα kγ + k(k − 1)αβ/2 1 α γ
⎢
⎥⎢
⎥
⎥ ⎢0 1 β ⎥ =
Ak+1 = Ak · A = ⎢
0
1
kβ
⎣
⎦⎣
⎦
0 0
1
0 0 1
⎡
⎤
1 (k + 1)α (k + 1)γ + k(k + 1)αβ/2
⎢
⎥
⎥.
=⎢
1
(k + 1)β
⎣0
⎦
0
0
1
Следовательно, P (n) принимает истинное значение для всех n 1.
Тем самым доказано, что
⎡
⎤
1 nα nγ + n(n − 1)αβ/2
⎢
⎥
⎥
An = ⎢
0
1
nβ
⎣
⎦
0 0
1
для всех n ∈ N.
2.45. Решение.
Предположим, что q-я степень матрицы U (ϕ) определяется по формуле:
cos(qϕ) sin(qϕ)
q
(U (ϕ)) =
, где q ∈ Z.
− sin(qϕ) cos(qϕ)
Обозначим это утверждение через P (q) и докажем его сначала для
q ∈ N. Применим метод математической индукции.
База индукции
Для n = 1 имеем
cos(ϕ)
sin(ϕ)
= U (1 · ϕ) — верно.
(U (ϕ))1 =
− sin(ϕ) cos(ϕ)
Шаг индукции
Предположим, что P (n) верно для n = k:
cos(kϕ) sin(kϕ)
k
,
(U (ϕ)) =
− sin(kϕ) cos(kϕ)
Докажем истинность утверждения для n = k + 1.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
k+1
=
cos(kϕ)
sin(kϕ)
123
cos ϕ
sin ϕ
(U (ϕ))
=
=
− sin(kϕ) cos(kϕ) − sin ϕ cos ϕ
cos(kϕ) cos ϕ − sin(kϕ) sin ϕ
cos(kϕ) sin ϕ + sin(kϕ) cos ϕ
− sin(kϕ) cos ϕ − cos(kϕ) sin ϕ − sin(kϕ) sin ϕ + cos(kϕ) cos ϕ
cos(k + 1)ϕ sin(k + 1)ϕ
=
.
− sin(k + 1)ϕ cos(k + 1)ϕ
Следовательно, для q ∈ N имеет место равенство:
cos(qϕ) sin(qϕ)
q
.
(U (ϕ)) =
− sin(qϕ) cos(qϕ)
=
Теперь осталось доказать справедливость этого равенства для всех
целых q.
В самом деле, (U (ϕ))0 = I = U (0) и для всех ϕ ∈ R существует
обратная матрица
U (ϕ)−1 = U (−ϕ).
Таким образом, для q = 0, 1, 2, . . . выполняется (U (ϕ))−q = U (−qϕ).
Это означает, что
cos(qϕ)
sin(qϕ)
(U (ϕ))q =
для q ∈ Z.
− sin(qϕ) cos(qϕ)
2.46. Ответ:
[A, B q ] = qB q−1 для всех q ∈ Z.
2.47. Решение.
Последовательно
выполняем
алгебраические
действия:
1 0 1 0
1 0
1 0
1) f (A) =
−3
+2
=
0 1 0 1
0 1
0 1
1 0
3 0
2 0
0 0
=
−
+
=
.
0 1
0 3
0 2
0 0
1 −2
1 −2
1 −2
1 0
7 −4
2) f (A) =
−3
+2
=
−
−3 1
−3 1
−3 1
0 1
−6 7
3 −6
2 0
6 2
−
+
=
.
−9 3
0 2
3 6
124
ГЛАВА 2. АЛГЕБРА МАТРИЦ
2.48. Решение.
⎡
⎤⎡
1 0 0
1 0
⎢
⎥⎢
⎢
⎥
⎢
1) g(A) = ⎣1 1 0⎦ ⎣1 1
1 1 1
1 1
⎡
⎤ ⎡
⎤ ⎡
1 0 0
1 0 0
3
⎢
⎥ ⎢
⎥ ⎢
⎥ ⎢
⎥ ⎢
=⎢
⎣3 1 0⎦ + ⎣ 1 1 0⎦ − ⎣0
6 3 1
⎡
1 1 1
−2 1
⎢
2) g(A) = ⎢
⎣ 3 −1
2 1
⎡
⎤
⎡
−2 1 0
1
⎢
⎥
⎢
⎥
⎢
+⎢
⎣ 3 −1 1⎦ − 3 ⎣0
1
⎤
⎡
⎤
⎡
⎤
0
1 0 0
1 0 0
1 0 0
⎥⎢
⎥ ⎢
⎥
⎢
⎥
⎥
⎢
⎥
⎢
⎥
⎢
0⎦ ⎣ 1 1 0⎦ + ⎣ 1 1 0⎦ − 3 ⎣0 1 0⎥
⎦=
1
1 1 1
1 1 1
0 0 1
⎤ ⎡
⎤
0 0
−1 0 0
⎥ ⎢
⎥
⎢ 4 −1 0 ⎥ ;
=
3 0⎥
⎦ ⎣
⎦
0 0 3
7 4 −1
⎤⎡
⎤
⎤⎡
−2 1 0
0 −2 1 0
⎥⎢
⎥
⎥⎢
⎢ 3 −1 1⎥ ⎢ 3 −1 1⎥ +
1⎥
⎦⎣
⎦
⎦⎣
2 1 0
0
2 1 0
⎤
0 0
⎥
1 0⎥
⎦=
0 0 1
⎤ ⎡
⎤ ⎡
⎤ ⎡
⎤
−2 1 0
3 0 0
−26 12 −3
−21 11 −3
⎥ ⎢
⎥ ⎢
⎥ ⎢
⎥
⎢
⎥ ⎢
⎥ ⎢
⎥ ⎢
⎥
=⎢
⎣ 27 −13 5 ⎦ + ⎣ 3 −1 1⎦ − ⎣0 3 0⎦ = ⎣ 30 −17 6 ⎦ .
2 1 0
0 0 3
9
0 −2
7
−1 1
⎡
2
⎤⎡
0
2.49. Решение.
1) Числитель дроби равен
⎡
⎤
1 0
0
⎢
⎥
⎢0 −41 0 ⎥ .
⎣
⎦
0
0
−6
В свою очередь, знаменатель образует матрица
⎡
⎤
−4 0
0
⎢
⎥
⎢ 0 −46 0 ⎥ ,
⎣
⎦
0
0 −6
обратная по отношению к ней матрица равна
⎤
⎡
−1/4
0
0
⎥
⎢
⎥.
⎢ 0
0
−1/46
⎦
⎣
0
0
−1/6
Выполнив операцию умножения, получим:
ГЛАВА 2. АЛГЕБРА МАТРИЦ
⎡
⎤⎡
1
0
⎢
g(A) = ⎢
⎣0 −41
0
125
⎤
−1/4
⎥⎢
⎢
0⎥
⎦⎣ 0
0 0 −6
0
2)
⎡ Числитель ⎤дроби равен
−6 2 0
⎢
⎥
⎢ 0 −6 0 ⎥ .
⎣
⎦
0
−1/46
0
⎡
0
−23 0
⎥
⎢
⎢ 0
=
1/92
0 ⎥
⎦
⎣
−1/6
0
⎤
0
⎥
82 0 ⎥
⎦.
0 92
0 2 −6
Знаменатель
этой дроби равен
⎡
⎤
−6 −2 0
⎢
⎥
⎢ 0 −6 0 ⎥ .
⎣
⎦
0 −2 −6
Найдем
матрицу, обратную
к знаменателю:
⎡
⎤
−1/6 1/18
0
⎢
⎥
⎢ 0
⎥.
−1/6
0
⎣
⎦
0
1/18 −1/6
В итоге⎡получаем: ⎤ ⎡
−6 2 0
−1/6 1/18
⎢
⎥⎢
⎥⎢
g(A) = ⎢
−1/6
⎣ 0 −6 0 ⎦ ⎣ 0
0
2
−6
0
⎤
0
⎡
3 −2 0
⎤
⎥
⎥ 1⎢
⎢0 3 0⎥ .
=
0 ⎥
⎦ 3⎣
⎦
1/18 −1/6
0 −2 3
2.50. Доказательство.
Рассмотрим последовательность
целых неотрицательных степеней
0 −1
матрицы A =
:
1 0
1 0
0 −1
−1 0
0
1
2
,A =
,A =
,
A =
0 1
1 0
0 −1
0
1
1
0
A3 =
, A4 =
и т. д.
−1 0
0 1
Получаем, что элементы матрицы exp(A) определяются суммами
∞ (−1)k
= cos 1,
(eA )11 = 1 + 0/1! − 1/2! + 0/3! + 1/4! + . . . =
k=0 (2k)!
∞ (−1)k+1
(eA )12 = 0 − 1/1! − 0/2! + 1/3! + 0/4! + . . . =
= − sin 1,
k=0 (2k + 1)!
126
ГЛАВА 2. АЛГЕБРА МАТРИЦ
∞
(−1)k
= sin 1,
k=0 (2k + 1)!
∞ (−1)k
(eA )22 = 1 + 0/1! − 1/2! + 0/3! − 1/4! + . . . =
= cos 1.
k=0 (2k)!
Следовательно, имеет место равенство
cos 1 − sin 1
exp(A) =
.
sin 1 cos 1
(eA )21 = 0 + 1/1! + 0/2! − 1/3! + 0/4! + . . . =
2.51. Решение.
1) Вычисляем
степени ⎤
матрицы A:
⎡
⎤младшие ⎡
⎡
⎤
1 0 0
1 0 0
1 0 0
⎢
⎥
⎢
⎥
⎢
⎥
1
2
⎥
⎢
⎥
⎢
⎥
A0 = ⎢
⎣0 1 0⎦ , A = ⎣0 1 0⎦ , A = ⎣0 1 0⎦ .
0 0 1
0 0 0
0 0 0
n
Ясно, что ∀n 1 (A = A). Элементы матрицы exp(A) равны
1
1
1
+ + + . . . = e, (eA )33 = 1,
1! 2! 3!
а остальные элементы принимают нулевые значения.
Следовательно,
⎡
⎤
e 0 0
⎢
⎥
⎥
exp(A) = ⎢
⎣0 e 0⎦ .
(eA )11 = (eA )22 = 1 +
0 0 1
2) Младшие
степени
матрицы
равны
⎡
⎤
⎡
⎤
⎡
⎤
1 0 0
0 1 0
0 0 1
⎢
⎥
⎢
⎥
⎢
⎥
⎥ , A1 = ⎢0 0 1⎥ , A2 = ⎢0 0 0⎥ .
A0 = ⎢
0
1
0
⎣
⎦
⎣
⎦
⎣
⎦
0 0 1
0 0 0
0 0 0
Как легко видеть, A3 = O, и все старшие натуральные степени этой
матрицы равны нулевой матрице.
Окончательно получаем:
⎡
⎤
1 1 1/2
⎢
⎥
⎢
exp(A) = ⎣0 1 1 ⎥
⎦.
0 0
1
ГЛАВА 2. АЛГЕБРА МАТРИЦ
127
2.52. Решение.
n
⎡1) Методом
⎤ математической индукции несложно доказать, что A =
1 0 n
⎢
⎥
⎢
= ⎣0 1 0 ⎥
⎦ для всех целых неотрицательных n.
0 0 1
⎡∞
⎤
∞ k
1
0
⎢
⎥
k=1 k! ⎥
⎢k=0 k! ∞
⎥
⎢
1
0 ⎥
Согласно формуле (2.49), имеем: eA = ⎢
⎥.
⎢ 0
k=0 k!
⎢
⎥
∞ 1⎦
⎣
0
0
k=0 k!
Суммы, определяющие диагональные элементы, сходятся к основанию натуральных логарифмов
n
1
.
e = lim 1 +
n→∞
n
Далее, сумма
(eA )13 =
∞
∞
∞
k
1
1
=
=
k!
(k − 1)!
k!
k=1
k=1
также равна e.
Таким образом, запишем ответ:
⎡
k=0
⎤
e 0 e
⎢
⎥
⎥
eA = ⎢
⎣0 e 0⎦ .
0 0 e
(2.86)
2) Вычислив
произвольную
⎡
⎤ натуральную степень матрицы A, полу1 0
n
⎢
⎥
n
⎥
чим: A = ⎢
⎣n 1 n(n + 1)/2⎦.
0 0
1
Вычисление диагональных элементов экспоненты и элемента (eA )13
проводится аналогично пункту 1) этого упражнения.
Элемент, который расположен на пересечении второй строки и тре∞ n(n + 1)
. Преобразуем
тьего столбца, определяется суммой (eA )23 =
2n!
n=1
эту сумму к виду
∞
∞
∞
∞
(n + 1)
(n − 1) + 2 1 1
2
=
=
+
.
2(n
−
1)!
2(n
−
1)!
2
(n
−
2)!
2(n
−
1)!
n=1
n=1
n=2
n=1
128
ГЛАВА 2. АЛГЕБРА МАТРИЦ
3
Следовательно, (eA )23 = e.
2
В итоге получаем:
⎤
e
⎢
3 ⎥
eA = ⎢
e
e
e⎥ .
⎣
2 ⎦
0 0 e
⎡
e 0
2.53. Решение.
1) Согласно формуле (2.53) имеем:
1
ln A = (A − I) − (A − I)2 + . . . ,
2
или
⎡
⎤
1 0 1
⎡
⎡
⎤
0 0 1
0 0 1
⎤2
⎡
⎤
0 0 1
⎥
⎢
⎥
⎢
⎥ ⎢
⎥ 1⎢
⎢
⎥
⎢
⎥
⎥ ⎢
⎥
ln ⎢
⎣0 1 0⎦ = ⎣0 0 0⎦ − 2 ⎣ 0 0 0⎦ + . . . = ⎣ 0 0 0⎦ .
0 0 0
0 0 0
0 0 1
0 0 0
2) После вычисления младших степеней матрицы (A − I) можно записать общую формулу для (A − I)n , где n 1:
⎤
⎡
0 0
δn1
⎥
⎢
n
⎢
(A − I) = ⎣δn1 0 δn1 + δn2 ⎥
⎦,
0
0
0
где δij — символ Кронекера.
Из этого следует, что
⎤
⎡
⎤ ⎡
0 0 1
1 0 1
⎥
⎢
⎥ ⎢
⎥ = ⎢1 0 1 ⎥ .
ln ⎢
1
1
1
⎣
⎦ ⎣
2⎦
0 0 1
0 0 0
2.54. Указание.
Воспользуйтесь формулой (2.49) и примените метод математической
индукции.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
129
2.56. Ответ:
Квадратная матрица размера 3 × 3 после приведения к ступенчатому
виду с помощью элементарных преобразований может принять одну из
следующих форм:
⎡
⎤ ⎡
1 a b
⎤ ⎡
1 a b
⎤ ⎡
1 a b
⎤
1 a b
⎢
⎥ ⎢
⎥ ⎢
⎥ ⎢
⎥
⎢ 0 1 c ⎥ , ⎢ 0 1 c ⎥ , ⎢ 0 0 1⎥ , ⎢0 0 0⎥ .
⎣
⎦ ⎣
⎦ ⎣
⎦ ⎣
⎦
0 0 1
0 0 0
0 0 0
0 0 0
Здесь через a, b и c обозначены произвольные вещественные числа.
2.57. Ответ:
1) добавление к i-й строке строки с номером j при j > i;
2) добавление к i-му столбцу столбца с номером j при j < i.
2.58. Решение.
1) Проведем следующие элементарные преобразования: ко второй
строке прибавим первую, из третьей строки вычтем удвоенную первую,
затем к третьей строке прибавим вторую строку. ⎡
⎤
1 2 −4 3 −2
⎥
⎢
⎢
Получим матрицу в ступенчатой форме: A → ⎣0 5 −10 1 2 ⎥
⎦, ее
0 0 0 0 12
ранг равен rk A = 3.
2) Из второй строки вычтем половину первой, из четвертой строки
вычтем две первых, поменяем местами вторую и третью строки, из четвертой строки вычтем вторую, поменяем местами третью и четвертую
строки, и, наконец, из четвертой строки вычтем половину третьей.
⎡
⎤
2 −4 3 1 0
⎢
⎥
⎢0 1 −1 3 1⎥
⎥
Получим: A → ⎢
⎢0 0 −1 −9 4⎥, следовательно, rk A = 3.
⎣
⎦
0 0 0 0 0
3) Воспользуемся методом элементарных преобразований. Из второй
строки вычтем учетверенную первую, из третьей строки вычтем первую,
из четвертой строки вычтем удвоенную первую. Далее из третьей строки вычтем вторую, умноженную на 5/9. Наконец, из четвертой строки
вычтем вторую, деленную на 3.
130
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Тогда получим:
⎡
1
2
1
⎤
3
⎢
⎥
⎢0 −9 −9 −18⎥
⎢
⎥,
A=⎢
⎥
0
0
0
0
⎣
⎦
0 0 0
0
следовательно, rk A = 2.
4) Поменяем местами первую и вторую строки, прибавим к третьей
строке утроенную первую, к пятой строке прибавим удвоенную первую.
Далее к третьей строке прибавим вторую, умноженную на 11/2. Из четвертой строки вычтем вторую, умноженную на 5/2. К пятой строке прибавим вторую, умноженную на 5/2. Наконец, из пятой строки вычтем
третью, умноженную на 2/3.
⎡
⎤
−1 −4 −5
⎢
⎥
⎢ 0 2 −4 ⎥
⎢
⎥
⎢
⎥
После указанных преобразований получим: A → ⎢ 0 0 −30⎥,
⎢
⎥
⎢0 0
⎥
0
⎣
⎦
0 0
0
следовательно, ранг этой матрицы равен трем.
5) Выполним следующие элементарные преобразования: из второй
строки вычтем первую, умноженную на 1/3. Далее из третьей строки
вычтем первую, умноженную на 1/3. И, наконец, из третьей строки вычтем учетверенную вторую. ⎡
⎤
3 5
7
⎥
⎢
⎥, ранг такой матрицы равен
После этого получим: A → ⎢
0
1/3
2/3
⎦
⎣
0 0
0
двум.
6) Матрица представлена в ступенчатой форме, и, как легко видеть,
rk A = 3.
7) Ко второй строке прибавим удвоенную первую, из третьей строки
вычтем удвоенную первую, к третьей строке прибавим вторую.
Тогда получим:
⎡
⎤
1 −1 2 4 3
⎢
⎥
⎥
A→⎢
⎣0 −1 9 10 12⎦ ,
0
и ранг матрицы A равен трем.
Powered by TCPDF (www.tcpdf.org)
0
9 9
8
ГЛАВА 2. АЛГЕБРА МАТРИЦ
131
8) Из второй строки вычтем удвоенную первую, из третьей строки
вычтем первую, умноженную на пять. Далее из четвертой строки вычтем первую, умноженную на семь. Из третьей строки вычтем удвоенную вторую и поменяем местами третью и четвертую строки. Наконец,
из третьей строки вычтем удвоенную вторую.
После выполнения указанных преобразований получим:
⎡
⎤
1 3 5 −1
⎢
⎥
⎢0 −7 13 6 ⎥
⎥
A→⎢
⎢0 0 0 −4⎥ ,
⎣
⎦
0 0 0 0
следовательно, rk A = 3.
2.59. Решение.
Рассмотрим минор первого порядка M11 = β − γ. Если β = γ, то ранг
матрицы Λ не меньше единицы.
β − γ 0 1,2
Далее рассмотрим минор второго порядка M1,2 = . Если
γ − α −γ выполняется условие γ = 0, то rk Λ 2.
Наконец, вычислим окаймляющие миноры третьего порядка:
γ β − γ 0
1,2,3
= γ − α −γ 0 = 0,
M1,2,3
α − β β −α
β − γ 0 −β 1,2,3
M1,2,4
= γ − α −γ α = 0.
α − β β
0 Следовательно, максимальное значение, которое может принимать ранг
матрицы Λ, равно двум.
Заметим, что с помощью символа Кронекера (см. с. 20) формулу для
ранга этой матрицы можно записать в виде rk Λ = 2(1 − δα0 δβ0 δγ0 ).
2.60. Решение.
а) Используем метод окаймляющих миноров (см. с. 83):
1 λ
1,2
=
M11 = 1 = 0, M1,2
= 1 − λ.
1 1 132
ГЛАВА 2. АЛГЕБРА МАТРИЦ
Далее рассмотрим два случая.
⎡
⎤
⎡
⎤
1
1
0
1 1 0
(2)−(1) ⎢
⎥
⎢
⎥
(2)↔(3)
⎢0 0 1⎥. Ясно,
⎥
1) Если λ = 1, то матрица равна ⎢
→
1
1
0
⎣
⎦
⎣
⎦
0 0 0
0 0 1
что ее ранг равен двум.
2) Если λ = 1, то в этом случае вычисляем окаймляющий минор
третьего порядка (он единственен):
1 λ 0
1,2,3
= 1 1 0 = 1 − λ = 0.
M1,2,3
0 0 1
Следовательно, ранг матрицы равен
2, если λ = 1,
3, если λ = 1.
б) Младший минор M11 = 1 − λ.
Далее рассматриваем два случая.
⎡
⎤
0 0 0
⎢
⎥
⎢
1) Если λ = 1, то матрица равна ⎣0 1 0⎥
⎦, и ее ранг, как легко
0 0 2
видеть, равен двум.
2) Если λ = 1, то вычисляем окаймляющие миноры дальше:
1 − λ
0
1,2
=
M1,2
= (1 − λ)(2 − λ).
0
2 − λ
⎡
−1 0 0
⎢
Если λ = 2, получаем матрицу ⎢
⎣0
0
⎤
⎥
0 0⎥
⎦, ее ранг равен двум.
0 1
1,2,3
:
Если λ = 2, то требуется вычислить окаймляющий минор M1,2,3
1,2,3
= (1 − λ)(2 − λ)(3 − λ).
M1,2,3
⎡
⎤
−2 0 0
⎢
⎥
⎥
В случае, когда λ = 3, матрица равна ⎢
⎣ 0 −1 0⎦, ее ранг равен
0
двум. Иначе, ранг равен трем.
0
0
ГЛАВА 2. АЛГЕБРА МАТРИЦ
133
В итоге формируем ответ:
2, если λ ∈ {1, 2, 3},
3, в противном случае.
в) Поскольку M11 = 1 = 0, то ранг матрицы не меньше единицы.
Далее рассматриваем миноры второго порядка:
1
2 1,2
M1,2 = = 4 − λ.
−1 2 − λ
Этот минор не равен нулю при λ = 4. Рассмотрим для этого случая
окаймляющий минор третьего порядка:
2
−3 1
1,2,3
= −1 2 − λ 10 = λ2 − 4λ − 14.
M1,2,3
−1
0
3 − λ
√
Определитель равен нулю при λ = 2 ± 3 2. При таких значениях λ
ранг равен двум, для остальных значений ранг равен трем.
Теперь рассмотрим случай λ = 4.
Тогда ненулевой минор второго порядка:
2
−3
1,2
M2,3 = = 14 = 0.
2 − λ 10 Значит, ранг не меньше двух. Минор √
третьего порядка единственный,
но он равен нулю только при λ = 2 ± 3 2, как показано выше. Значит,
в этом случае ранг равен
√ трем.
Итак, при λ = 2 ± 3 2 ранг матрицы равен двум, при остальных λ
ранг матрицы равен трем.
г) Существует M21 = 1 = 0, значит, ранг матрицы не меньше единицы.
Далее рассматриваем миноры второго порядка:
−λ
1 1,2
M1,2 = = λ(λ − 1).
0 1 − λ
Этот минор не равен нулю при λ = 0 и при λ = 1. Ищем для этого
случая минор третьего порядка:
1
1 −λ
1,2,3
= 0 1 − λ
M1,2,3
1 = λ(λ − 1)(2 − λ),
0
0
2 − λ
134
ГЛАВА 2. АЛГЕБРА МАТРИЦ
λ(λ − 1)(2 − λ) = 0 при λ = 2 (т. к. λ = 1 и λ = 0). В этом случае
ранг равен трем.
При λ = 2 ранг равен двум.
Пусть
теперь
λ = 0:
⎡
⎤
0 1 1
⎢
⎥
⎢ 0 1 1⎥ ,
⎣
⎦
0 0 2
1 1
2,3
M2,3
=
= 2 = 0.
0 2
Значит, ранг больше двух.
0 1 1
Но так как выполняется условие 0 1 1 = 0,
0 0 2
то в этом случае ранг равен двум.
Теперь
рассмотрим
λ = 1:
⎡
⎤
−1 1 1
⎢
⎥
⎢ 0 0 1⎥
⎣
⎦
0 0 1
1 1
1,2
=
Ранг равен двум, т.к. M2,3
= 1 = 0, и определитель матрицы
0 1
равен нулю.
Следовательно, ранг равен двум при λ ∈ {0, 1, 2} и равен трем в
остальных случаях.
д) Минор первого порядка M11 = 1 = 0, значит, ранг матрицы принимает значение, не меньшее единицы.
Найдем окаймляющий минор второго порядка:
1
−6
1,2
=
M1,2
= −4 − λ.
−1 2 − λ
Этот минор не равен нулю, если λ = −4. Найдем минор третьего
порядка для таких значений λ:
−6
−5 1
1,2,3
= −1 2 − λ
M1,2,3
5 = λ2 + 8λ + 16.
−1
6
1 − λ
ГЛАВА 2. АЛГЕБРА МАТРИЦ
135
Это выражение может быть равно нулю только при λ = −4. Следовательно, в этом случае ранг равен трем.
Теперь
рассмотрим
случай, когда λ = −4.
⎡
⎤
1 −6 −5
⎢
⎥
⎢−1 6 5 ⎥ .
⎣
⎦
−1 6 5
Ранг полученной матрицы равен единице.
В итоге, ранг равен единице при λ = −4 и равен трем при λ = −4.
е) Существует M12 = 1 = 0, значит, ранг не меньше единицы.
Найдем миноры второго порядка:
1 − λ
2 1,2
M1,2 = = λ(λ − 3).
1
2 − λ
1,2
не равен нулю, если λ = 0 и λ = 3. Определим для таких
Минор M1,2
значений параметра λ окаймляющие миноры третьего порядка.
1
−
λ
2
0
1,2,3
M1,2,3 = 1
2−λ
0 = λ(λ − 3)(3 − λ).
0
0
3 − λ
Минор третьего порядка ненулевой для всех рассматриваемых в этом
случае
порядка (он единственный):
λ. Найдем минор четвертого
1 − λ
2
0
0 1
2−λ
0
0 = λ(λ − 3)(3 − λ)(4 − λ).
0
0
3−λ
0 0
0
0
4 − λ
Он равен нулю только при λ = 4. Для этого случая ранг равен трем.
При λ = 4 ранг равен четырем.
Далее рассмотрим
значение λ = 0:
3 0
3,4
=
M3,4
= 12 = 0,
0 4
3 0 0
2,3,4
M2,3,4
= 0 3 0 = 24 = 0.
0 0 4
Для λ = 0 определитель исходной матрицы равен нулю. Значит, ранг
равен трем.
136
ГЛАВА 2. АЛГЕБРА МАТРИЦ
При
⎡ λ = 3:
⎤
−2 2 0 0
⎢
⎥
⎢ 1 −1 0 0⎥
⎢
⎥
⎢ 0 0 0 0⎥ .
⎣
⎦
0 0 0 1
Не существует минора третьего ранга, который не равнялся бы нулю.
Следовательно, ранг равен двум.
Окончательно получаем: ранг равен двум при λ = 3, трем при λ ∈
∈ {0, 4}, четырем — в остальных случаях.
ж) Существует M12 = 0, значит, ранг не меньше единицы.
Найдем миноры второго порядка:
1 − λ
2
1,2
M1,2
=
= −(λ2 + 1) = 0.
1
1 + λ
Этот минор всегда отличен от нуля. Рассмотрим окаймляющие миноры
третьего порядка:
2
0 1 − λ
1
1+λ
0 = (2 − λ)(−λ2 − 1) = 0 только при λ = 2, но
0
0
2 − λ
2
0 1 − λ
1
1+λ
0 = (2 + λ)(−λ2 − 1) = 0 только при λ = −2.
0
0
2 + λ
Это значит, что миноры третьего порядка одновременно не равны
нулю.
Вычислим определитель исходной матрицы (другими словами, минор
четвертого
порядка):
1 − λ
2
0
0 1
1
+
λ
0
0
= (2 + λ)(2 − λ)(−λ2 − 1).
0
0
2−λ
0 0
0
0
2 + λ
При λ = ±2:
(2 + λ)(2 − λ)(−λ2 − 1) = 0, значит, ранг равен трем.
Для остальных λ ранг равен четырем.
Итак, ранг равен трем при λ = ±2, четырем — при λ = ±2.
з) Существует M12 = 0, значит, ранг не меньше единицы.
ГЛАВА 2. АЛГЕБРА МАТРИЦ
137
Найдем миноры второго порядка:
1 + λ 2
1,2
=
M1,2
= λ − 1 = 0 при λ = 1.
1
1
Для этого случая находим миноры третьего порядка:
1 + λ 2 4 1,2,3
= 1
M1,2,4
1 0 = −(λ − 1) = 0.
0
0 −1
Значит, ранг не меньше трех. Вычислим определитель исходной матрицы:
1 + λ 2
0
4
1
1
0
0
= λ2 − λ − 12.
0
0 2 + λ −1
1
0
2
1
Определитель равен нулю при λ = 4 или λ = −3. Следовательно, при
таких значениях параметра λ ранг равен трем. В остальных случаях ранг
равен четырем.
Теперь рассмотрим случай, когда λ = 1. Найдем минор второго порядка:
1 0
2,3
M2,3 = = 3 = 0.
0 3
Вычислим
минор третьего порядка:
2 0 4 1,2,3
= 1 0 0 = 12 = 0.
M2,3,4
0 3 −1
Значит, ранг матрицы не меньше трех. Теперь найдем определитель
исходной матрицы.
2 2 0 4 1 1 0 0 0 0 3 −1 = −12 = 0.
1 0 2 1 Из этого следует, что ранг в таком случае равен четырем.
Итак, ранг равен трем при λ ∈ {−3, 4} и равен четырем в остальных
случаях.
138
ГЛАВА 2. АЛГЕБРА МАТРИЦ
и) Размер матрицы равен (n + 1) × (n + 1). Как легко видеть, при
λ ∈ {0, 1, . . . , n} определитель матрицы принимает значение, равное нулю. Заметим также, что в этом случае существует минор порядка n,
отличный от нуля. Например, для λ = 0:
1
1 ...
1
1 1 − λ
0
2 − λ 1 ...
1
1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
0
0
0
.
.
.
(n
−
1)
−
λ
1
0
0
0 ...
0
n − λ
Определитель верхней треугольной матрицы, как известно, равен произведению диагональных членов матрицы. Поскольку выполняется условие λ = 0, то это произведение не равно нулю. Следовательно, ранг исходной матрицы в этом случае равен n. Если же условие λ ∈ {0, 1, . . . , n}
не выполняется, то ранг исходной матрицы принимает значение, равное
n + 1.
Получаем окончательный ответ: ранг матрицы равен n при λ ∈ {0, 1,
. . . , n}, и равен n + 1 при остальных значениях λ.
Глава 3
Системы линейных уравнений
Систему m линейных уравнений с n неизвестными записывают так:
⎧
⎪
⎪
⎪
⎪
⎨
a11 x1 + a12 x2 + . . . + a1n xn = b1 ,
a21 x1 + a22 x2 + . . . + a2n xn = b2 ,
⎪
....................................
⎪
⎪
⎪
⎩
am1 x1 + am2 x2 + . . . + amn xn = bm .
(3.1)
Здесь через x1 , x2 , . . . , xn обозначены неизвестные числа, aij и bi —
заданные числа, или, как говорят, коэффициенты системы уравнений (3.1). Величины bi называют свободными членами, или правыми
частями уравнений.
Решением системы уравнений называют такую совокупность n
чисел, которая при подстановке в систему на место неизвестных x1 , x2 , . . .,
xn превращает все уравнения в тождества. Решение записывают в виде
вектора [x1 , x2 , . . . , xn ]T .
Если bi = 0 при всех i = 1, 2, . . . , m, то систему уравнений называют
однородной. Если хотя бы один из свободных членов bi = 0, то систему
уравнений называют неоднородной.
В случае, когда m = n, систему уравнений называют квадратной,
а когда m = n — прямоугольной.
Система линейных уравнений называется совместной, если она имеет хотя бы одно решение, и несовместной, если решений нет [32].
Если совместная система имеет единственное решение, то ее называют определенной. Если у совместной системы имеется по крайней мере
два различных решения, то она называется неопределенной.
140
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Матрицу
⎡
a11 a12 . . . a1n
⎤
⎢
⎥
⎢ a21 a22 . . . a2n ⎥
⎢
⎥,
A=⎢
⎥
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
⎣
⎦
am1 am2 . . . amn
(3.2)
состоящую из коэффициентов при неизвестных aij , называют матрицей
системы.
Матрицу
⎤
⎡
a11 a12 . . . a1n | b1
⎥
⎢
⎢ a21 a22 . . . a2n | b2 ⎥
⎥,
⎢
B=⎢
(3.3)
⎥
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
|
.
.
.
⎦
⎣
am1 am2 . . . amn | bm
в которую добавлен столбец свободных членов bj , называют расширенной матрицей системы.
Если неизвестные и свободные члены записать в виде столбцов (матриц размера n × 1 и m × 1 соответственно):
⎡
x1
⎤
⎢ ⎥
⎢ x2 ⎥
⎥
X=⎢
⎢ ... ⎥ ,
⎣ ⎦
xn
⎡
b1
⎤
⎢ ⎥
⎢ b2 ⎥
⎥
B=⎢
⎢ ... ⎥ ,
⎣ ⎦
bm
(3.4)
то систему уравнений (3.1) можно представить в сокращенном матричном виде:
A · X = B.
(3.5)
3.1.
Метод Крамера
Рассмотрим квадратную систему из n уравнений с n неизвестными:
⎧
⎪
a11 x1 + a12 x2 + . . . + a1n xn = b1 ,
⎪
⎪
⎪
⎨ a x + a x + ... + a x = b ,
21 1
22 2
2n n
2
(3.6)
⎪
..................................
⎪
⎪
⎪
⎩
an1 x1 + an2 x2 + . . . + ann xn = bn .
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
141
Теорема 3.1 (метод Крамера1 ). Если определитель матрицы A
системы (3.6) отличен от нуля, то система (3.6) определена, т. е.
имеет единственное решение. Это решение можно вычислить по
формуле
Δi
, i = 1, 2, . . . , n.
(3.7)
xi =
Δ
Здесь Δi — определитель матрицы, полученный из исходной матрицы A
заменой i-го столбца на столбец из свободных членов:
a ... a
b
a
.
.
.
a
1 i−1
1
1 i+1
1n 11
a21 . . . a2 i−1 b2 a2 i+1 . . . a2n Δi = . .
(3.8)
..
..
. . . ... .
...
..
.
.
..
an1 . . . an i−1 bn an i+1 . . . ann Если Δ = 0 и при этом хотя бы один из определителей Δi отличен
от нуля, то система (3.6) совсем не имеет решений (т. е. несовместна).
Если же Δ = 0, но также все Δi = 0, то система (3.6) имеет бесконечно много решений (т. е. совместна, но неопределена) или является
несовместной.
Пример 3.1. Решим систему:
5x − 6y = −8,
(3.9)
5x + 6y = 28.
Для данной системы имеем:
−8 −6 5 −8 5 −6 Δ=
= 120, Δy = = 180.
= 60, Δx = 28 6 5 28 5 6 (3.10)
Таким образом, согласно методу Крамера,
x=
Δy
120
180
Δx
= 2, y =
= 3.
=
=
Δ
60
Δ
60
(3.11)
Пример 3.2. Решим систему линейных уравнений:
⎧
⎪
⎪
⎨ 2x − y + 3z = 8,
x + y − 2z = 5,
⎪
⎪
⎩ 3x − 2y + z = 7.
1
Крамер (Gabriel Cramer) (1704–1752) — швейцарский математик.
(3.12)
142
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Решение.
Вычислим определители, требуемые
мера:
2 −1 3 Δ = 1 1 −2 = −14, Δx = 3 −2 1 для применения правила Кра
8 −1 3 5 1 −2 = −56,
7 −2 1 2 8 3 2 −1 8 Δy = 1 5 −2 = −42, Δz = 1 1 5 = −14.
3 7 1 3 −2 7 (3.13)
(3.14)
Отсюда
x=
Δy
Δz
Δx
= 4, y =
= 3, z =
= 1.
Δ
Δ
Δ
(3.15)
3.2.
Метод обратной матрицы
Рассмотрим систему уравнений (3.6). Запишем эту систему в виде
A · X = B в соответствии с (3.5).
Пусть матрица A имеет обратную A−1 . Умножим обе части равенства
A · X = B на A−1 слева:
A−1 · A · X = A−1 · B.
(3.16)
Преобразуем полученное матричное уравнение. Так как справедливы
тождества A−1 · A ≡ I и I · X ≡ X, то решение системы X может быть
записано в виде
(3.17)
X = A−1 · B.
Следовательно, если найти обратную матрицу A−1 , то решение системы можно получить как произведение матриц A−1 и B.
Пример 3.3. Решим систему уравнений
⎧
⎪
⎪
⎨ −2x + 2y − 3z = −10,
(3.18)
2x − y + 2z =
7,
⎪
⎪
⎩
3x − y + 3z =
10
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
методом обратной матрицы.
Решение.
Матрица анализируемой системы уравнений A имеет вид:
⎡
⎤
−2 2 −3
⎢
⎥
⎢ 2 −1 2 ⎥ .
⎣
⎦
3 −1 3
143
(3.19)
Построим обратную матрицу, используя матрицу алгебраических дополнений. Определитель матрицы A равен
−1 2
2 2
2 −1
det A = −2 − 2
− 3
=
−1 3
3 3
3 −1
= (−2)(−3 + 2) − 2(6 − 6) − 3(−2 + 3) = −1.
Вычислим алгебраические дополнения:
−1 2
2 2
A11 = (−1)1+1 = −1, A12 = (−1)1+2 = 0,
−1 3
3 3
A31
(3.21)
−1
−3
2+1 2
= 1, A21 = (−1) = −3,
3 −1
−1 3 (3.22)
−2 −3
−2 2 = (−1)2+2 = 3, A23 = (−1)2+3 = 4,
3 3
3 −1
(3.23)
A13 = (−1)
A22
(3.20)
1+3 2
2 −3
−2 −3
= (−1)3+1 = 1, A32 = (−1)3+2 = −2,
−1 2 2 2
−2 2 A33 = (−1)3+3 = −2.
2 −1
(3.24)
(3.25)
Запишем матрицу, сформированную из алгебраических дополнений:
⎡
⎤
−1 0 1
⎢
⎥
⎢−3 3 4 ⎥ .
(3.26)
⎣
⎦
1 −2 −2
144
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
В результате искомая обратная
⎡
−1 −3
1 ⎢
−1
⎢
A =
0 3
(−1) ⎣
1 4
матрица будет иметь вид:
⎤ ⎡
⎤
1
1 3 −1
⎥ ⎢
⎥
⎢
⎥
−2⎥
⎦ = ⎣ 0 −3 2 ⎦ .
−2
−1 −4
(3.27)
2
Тогда решение системы находим с помощью операции умножения
матриц:
⎡ ⎤ ⎡
⎤⎡
⎤ ⎡
⎤ ⎡ ⎤
x
1 3 −1
−10
−10 + 21 − 10
1
⎢ ⎥ ⎢
⎥⎢
⎥ ⎢
⎥ ⎢ ⎥
⎢y ⎥ = ⎢ 0 −3 2 ⎥ ⎢ 7 ⎥ = ⎢ 0 − 21 + 20 ⎥ = ⎢−1⎥ . (3.28)
⎣ ⎦ ⎣
⎦⎣
⎦ ⎣
⎦ ⎣ ⎦
z
−1 −4
2
10
10 − 28 + 20
2
3.3.
Метод Гаусса
Использование понятия ранга матрицы позволяет получить критерий
совместности системы линейных уравнений.
Рассмотрим систему:
⎧
⎪
a11 x1 + a12 x2 + . . . + a1n xn = b1 ,
⎪
⎪
⎪
⎨ a x + a x + ... + a x = b ,
21 1
22 2
2n n
2
(3.29)
⎪
....................................
⎪
⎪
⎪
⎩
am1 x1 + am2 x2 + . . . + amn xn = bm .
Расширенная матрица системы размера m × (n + 1) имеет вид:
⎤
⎡
a11 a12 . . . a1n | b1
⎥
⎢
⎢ a21 a22 . . . a2n | b2 ⎥
⎥
(3.30)
B=⎢
⎢ . . . . . . . . . . . . . . . . . . | . . .⎥ .
⎦
⎣
am1 am2 . . . amn | bm
Критерием совместности системы линейных алгебраических уравнений является теорема Кронекера – Капелли2 (иначе называемая теоремой
Руше3 – Капелли) [76].
2
3
Капелли (Alfredo Capelli) (1855–1910) — итальянский математик.
Руше (Eugène Rouché) (1832–1910) — французский математик.
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
145
Теорема 3.2 (Теорема Кронекера – Капелли). Система линейных алгебраических уравнений (3.29) совместна тогда и только тогда, когда ранг основной матрицы A равен рангу расширенной, т. е.
rk A = rk B = r.
Если r = n, то получается квадратная матрица с ненулевым определителем. Ее решение существует и оно единственно.
Если r < n и система совместна, то имеется бесконечное множество
решений.
Если rk B > rk A, то система несовместна.
В дальнейшем нулевыми уравнениями будем называть уравнения
вида 0 · x1 + 0 · x2 + . . . + 0 · xn = 0.
Элементарными преобразованиями системы линейных уравнений называются:
1) перестановка любых двух уравнений;
2) умножение уравнения на любое ненулевое число;
3) прибавление к одному уравнению другого, умноженного на произвольное число;
4) отбрасывание нулевых уравнений.
Метод Гаусса4 состоит в преобразовании расширенной матрицы B
с помощью элементарных преобразований к ступенчатому виду. Цель
таких преобразований будет состоять в получении системы вида:
⎧
⎪
b11 · x1 + b12 · x2 + . . . + b1r · xr + . . . + b1n · xn = p1 ,
⎪
⎪
⎪
⎨
b22 · x2 + . . . + b2r · xr + . . . + b2n · xn = p2 ,
(3.31)
⎪
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
⎪
⎪
⎪
⎩
brr · xr + . . . + brn · xn = pr .
Заметим, что для приведения системы уравнений к указанному виду
может потребоваться изменение нумерации переменных.
Система (3.31) может содержать меньше уравнений, чем исходная за
счет отбрасывания нулевых уравнений вида:
0 · x1 + 0 · x2 + . . . + 0 · xn = 0.
(3.32)
Если в результате преобразований получается уравнение
0 · x1 + 0 · x2 + . . . + 0 · xn = d = 0,
(3.33)
то система несовместна.
4
Гаусс (Johann Carl Friedrich Gauß) (1777–1855) — выдающийся немецкий математик и астроном.
146
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
1,2,...,r
Очевидно, что минор M1,2,...,r
— это базисный минор, если исходить
из того, что xr+1 , . . . , xn являются свободными неизвестными, которым
мы можем присваивать произвольные значения:
xr+1 = C1 , . . . , xn = Cn−r .
(3.34)
Перенесем эти переменные в правую часть, тогда полученная система
заведомо имеет решение относительно неизвестных x1 , x2 , . . . , xr .
Из последнего уравнения находим xr , из предпоследнего — xr−1 и т. д.
Примечание. О методе Гаусса говорят также как о методе последовательного исключения неизвестных.
Пример 3.4. Решим систему уравнений методом Гаусса:
⎧
⎪
+ x4 = −3,
x1 − 2x2
⎪
⎪
⎪
⎨ 3x − x − 2x
= 1,
1
2
3
(3.35)
⎪
⎪ 2x1 + x2 − 2x3 − x4 = 4,
⎪
⎪
⎩
x1 + 3x2 − 2x3 − 2x4 = 7.
Решение.
Выпишем расширенную матрицу:
⎡
1 −2 0 1
⎢
⎢3 −1 −2 0
⎢
⎢2 1 −2 −1
⎣
1 3 −2 −2
| −3
|
|
|
⎤
⎥
1⎥
⎥.
4⎥
⎦
7
(3.36)
Приведем полученную матрицу к верхнетреугольному виду. Для этого вычтем из второй строки утроенную первую, из третьей — удвоенную
первую, а из четвертой — первую:
⎡
⎤
1 −2 0 1 | −3
⎢
⎥
⎢0 5 −2 −3 | 10 ⎥
⎢
⎥
(3.37)
⎢0 5 −2 −3 | 10 ⎥ .
⎣
⎦
0 5 −2 −3 | 10
На следующем этапе вычтем из третьей и четвертой строки вторую.
Первая и вторая строки остаются без изменений:
⎤
⎡
1 −2 0 1 | −3
⎥
⎢
⎢0 5 −2 −3 | 10 ⎥
⎥
⎢
(3.38)
⎢0 0 0 0 | 0 ⎥ .
⎦
⎣
0 0 0 0 | 0
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
147
Ясно, что ранги основной и расширенной матриц равны двум. Система совместна и неопределена. В качестве свободных переменных возьмем
x1 и x3 . Пусть x1 = C1 , а x3 = C2 . Тогда имеем:
−3 − C1 ,
−2 · x2 + x4 =
5 · x2 − 3 · x4 = 10 + 2 · C2 .
(3.39)
Решаем эту систему относительно переменных x2 и x4 :
x2 = −1 + 3 · C1 − 2 · C2 ,
x4 = −5 + 5 · C1 − 4 · C2 .
(3.40)
Окончательно записываем ответ в виде:
⎤ ⎡ ⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤ ⎡
C1
0
1
0
x1
⎥ ⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥ ⎢
⎢ ⎥
⎢ ⎥
⎢x2 ⎥ ⎢−1 + 3C1 − 2C2 ⎥ ⎢−1⎥
⎥=⎢
⎥ = ⎢ ⎥ + C1 ⎢3⎥ + C2 ⎢−2⎥ . (3.41)
X=⎢
⎢x ⎥ ⎢
⎥ ⎢0⎥
⎢0⎥
⎢1⎥
C2
⎦ ⎣ ⎦
⎣ ⎦
⎣ ⎦
⎣ 3⎦ ⎣
x4
−5 + 5C1 − 4C2
−5
5
−4
Пример 3.5. Решим матричное уравнение относительно неизвестной
матрицы Y :
1 −1
1 3
−2 −6
Y
=
.
(3.42)
−1 2
1 3
3 9
Обратим внимание
на вырожденность одного из сомножителей, а
1 3
именно матрицы
.
1 3
Решение.
1 3
Заметим, что вырожденность матрицы
не позволяет восполь1 3
зоваться методом решения уравнения с помощью обратной матрицы.
В таком случае сведем задачу к системе линейных уравнений.
Обозначим элементы матрицы Y через y1 , y2 , y3 и y4 :
Y =
y 1 y2
y3 y4
.
(3.43)
148
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Последовательно раскрываем произведение матриц:
y2 − y 4
1 −1 y1 y2 1 3
1 3
−2 −6
y 1 − y3
=
=
=
y3 y4 1 3
−y1 + 2y3 −y2 + 2y4 1 3
−1 2
3 9
3y1 + 3y2 − 3y3 − 3y4
y1 + y2 − y3 − y4
.
(3.44)
=
−y1 − y2 + 2y3 + 2y4 −3y1 − 3y2 + 6y3 + 6y4
Полученная матрица равна
−2 −6
.
3 9
Приравнивая соответствующие элементы матриц, получаем неоднородную систему линейных уравнений относительно неизвестных y1 , y2 ,
y3 и y4 :
⎧
⎪
y1 + y2 − y3 − y4 = −2,
⎪
⎪
⎪
⎨ 3y + 3y − 3y − 3y = −6,
1
2
3
4
(3.45)
⎪
−y1 − y2 + 2y3 + 2y4 = 3,
⎪
⎪
⎪
⎩
−3y1 − 3y2 + 6y3 + 6y4 = 9.
Запишем расширенную матрицу этой
⎡
1 1 −1 −1
⎢
⎢ 3 3 −3 −3
⎢
⎢−1 −1 2 2
⎣
−3 −3 6 6
системы:
⎤
| −2
⎥
| −6⎥
⎥.
| 3⎥
⎦
| 9
(3.46)
Из второй строки вычтем первую, умноженную на 3, после этого из
четвертой строки вычтем третью, умноженную на 3:
⎡
⎤
1 1 −1 −1 | −2
⎢
⎥
⎢0 0 0 0 | 0⎥
⎢
⎥
(3.47)
⎢−1 −1 2 2 | 3 ⎥ .
⎣
⎦
0 0 0 0 | 0
Далее к третьей строке прибавим первую. Нулевые строки не оказывают влияния на решение, поэтому получаем следующую эквивалентную
матрицу:
1 1 −1 −1 | −2
.
(3.48)
0 0 1 1 | 1
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
149
Ей соответствует система уравнений с четырьмя неизвестными
y1 + y2 − y3 − y4 = −2,
(3.49)
y3 + y4 = 1.
Ранги основной и расширенной матриц равны двум. Следовательно,
делаем вывод о том, что система (3.49) совместна и неопределена.
В качестве независимых переменных выберем, например, y2 и y4 :
y4 = C2 , где C1 , C2 ∈ R.
y2 = C1 ,
Подставив (3.50) в систему (3.49), получим:
y1 + C1 − y3 − C2 = −2,
y3 + C 2 =
или
1,
y1 = −1 − C1 ,
y3 =
1 − C2 .
Выпишем коэффициенты y1 –y4 в виде столбца:
⎡ ⎤
⎡ ⎤
⎡ ⎤ ⎡ ⎤
−1
−1
0
y1
⎢ ⎥
⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢y2 ⎥ ⎢ 0 ⎥
⎢ ⎥ = ⎢ ⎥ + C 1 ⎢ 1 ⎥ + C2 ⎢ 0 ⎥ .
⎢0⎥
⎢−1⎥
⎢y ⎥ ⎢ 1 ⎥
⎣ ⎦
⎣ ⎦
⎣ 3⎦ ⎣ ⎦
y4
1
0
0
В итоге, матрица Y равна
−1 − C1 C1
1 − C2
C2
(3.50)
(3.51)
(3.52)
(3.53)
,
(3.54)
где C1 , C2 — произвольные вещественные числа.
Таким образом, матричное уравнение (3.42) имеет бесконечное множество решений, зависящих от двух вещественных параметров.
Проверка.
Непосредственной подстановкой полученной матрицы в (3.42) легко
убедиться, что Y определена верно:
1 −1 −1 − C1 C1 1 3
=
1 − C2 C 2 1 3
−1 2
1 3
−2 − C1 + C2 C1 − C2
−2 −6
=
=
.
3 + C1 − 2C2 −C1 + 2C2 1 3
3 9
150
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Пусть A и B — произвольные матрицы, размер которых равен m × n
и n × p соответственно. Оценку для ранга произведения матриц A и B
дает следующая теорема.
Теорема 3.3. Ранг произведения матриц удовлетворяет неравенству
rk AB min(rk A, rk B).
(3.55)
Иными словами, при умножении матриц ранг не может увеличиться [12, 76].
Существует множество различных методов решения систем линейных
уравнений.
Метод Гаусса является одним из наиболее часто используемых.
Рассмотрим реализацию на Python метода Гаусса решения систем
линейных уравнений (Листинг 3.1).
Для определенности будем строить решения для систем, в которых
количество уравнений и неизвестных совпадает, однако приведенный алгоритм легко трансформируется и для систем с произвольным соотношением уравнений и неизвестных.
Листинг 3.1
1 import math
2
3
4 def gaussian_elimination (A , B ):
5
m = len ( A )
6
n = len ( A [0])
7
8
if len ( B ) != m :
9
raise ValueError
10
11
C = [[ A [ i ][ j ] if j != n else B [ i ] \
12
for j in range ( n +1)] for i in range ( m )]
13
14
# Forward elimination
15
for r in range ( min (n , m )):
16
max_row_pos = r
17
18
# Pivoting strategy
19
for i in range ( r + 1 , m ):
20
if abs ( C [ i ][ r ]) > \
21
abs ( C [ max_row_pos ][ r ]):
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
151
max_row_pos = i
C [ r ] , C [ max_row_pos ] = \
C [ max_row_pos ] , C [ r ]
if math . isclose ( C [ r ][ r ] , 0):
continue
for i in range ( r + 1 , m ):
factor = C [ i ][ r ] / C [ r ][ r ]
for j in range (r , n + 1):
C [ i ][ j ] -= factor * C [ r ][ j ]
# Back substitution
answer = [0] * n
for i in range ( min ( n - 1 , m - 1) , -1 , -1):
s = 0.0
for j in range ( i + 1 , n ):
s += C [ i ][ j ] * answer [ j ]
if not math . isclose ( C [ i ][ i ] , 0):
answer [ i ] = ( C [ i ][ n ] - s ) / C [ i ][ i ]
elif not math . isclose ( C [ i ][ n ] - s , 0):
return None
for i in range (n , m ):
s = 0.0
for j in range ( n ):
s += C [ i ][ j ] * answer [ j ]
if not math . isclose ( C [ i ][ n ] - s , 0):
return None
return answer
На вход данной функции поступает два параметра: матрица коэффициентов при неизвестных в системе уравнений A и матрица правых
152
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
частей B.
Реализация функции состоит из трех основных этапов. На первом
из них строится матрица C, которая получается путем приписывания
матрицы B к исходной матрице A справа.
Затем выполняется так называемый прямой ход, целью которого является приведение матрицы к ступенчатому виду (то есть к виду, при
котором в каждой следующей строке при просмотре слева направо находится больше нулей, чем в предыдущей). Данная процедура осуществляется путем применения к матрице C ряда элементарных преобразований по следующему алгоритму: последовательно, начиная с первого,
просматриваются все столбцы. Среди элементов текущего столбца находится наибольший по модулю, называемый главным, или опорным.
Далее из каждой строки вычитается строка, содержащая опорный элемент и умноженная на коэффициент, равный отношению элемента строки в рассматриваемом столбце к опорному элементу. Таким образом, все
элементы в столбце, кроме опорного, становятся равными нулю. Процесс
выполняется до тех пор, пока в матрице не останется строка, содержащая только две величины: один коэффициент при неизвестной и одно
значение в правой части.
На третьем этапе выполняется обратный ход, при котором из полученной матрицы последовательно выражаются значения всех неизвестных через уже найденные переменные, в результате чего получается
единственное решение или определяется, что решений нет или же система уравнений содержит бесконечное множество решений. Выполнение
обратного хода начинается со строки, содержащей минимальное количество ненулевых коэффициентов, и продолжается до тех пор, пока все
неизвестные не окажутся выраженными через уже известные или будет
установлено, что единственного решения нет.
Асимптотическая сложность метода Гаусса в силу тройной вложенности циклов по переменным r, i, j равна O(n3 ), где n — число уравнений
в системе.
Приведем пример (см. Листинг 3.2) использования функции gaussian_elimination(A, B) для решения системы уравнений, матрица которой размера 100 × 100 имеет единицы на побочной диагонали и равные
нулю остальные элементы. Столбец B равен [1, 2, 3, 4, . . . , 100].
Листинг 3.2
1 size = 100
2
3 A = [[0 for j in range ( size )] \
4
for i in range ( size )]
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
5
6
7
8
9
10
11
12
13
14
153
B = [0 for i in range ( size )]
for i in range ( size ):
for j in range ( size ):
A [ i ][ j ] = 1 if j == size - i - 1 else 0
for i in range ( size ):
B [ i ] = float ( i )
print ( gaussian_elimination (A , B ))
3.4.
Фундаментальная совокупность
решений однородной системы уравнений
Рассмотрим однородную систему линейных уравнений, которая имеет
вид
⎧
⎪ a11 x1 + a12 x2 + . . . + a1n xn = 0,
⎪
⎪
⎪
⎨ a x + a x + . . . + a x = 0,
21 1
22 2
2n n
(3.56)
⎪
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
⎪
⎪
⎪
⎩
am1 x1 + am2 x2 + . . . + amn xn = 0,
где m — число уравнений, n — число неизвестных.
Данную систему можно записать в матричном виде:
A · X = 0,
(3.57)
где A — матрица системы, а через X обозначен столбец, образованный
переменными:
⎡ ⎤
x1
⎢ ⎥
⎢ x2 ⎥
⎥
(3.58)
X=⎢
⎢ ... ⎥ .
⎣ ⎦
xn
Эта система заведомо имеет решение X = [0, 0, . . . , 0]T , которое называется тривиальным.
Наша задача состоит в нахождении всех нетривиальных решений,
если таковые существуют.
Теорема 3.4. Пусть матрица A однородной системы уравнений
имеет размер m × n и ранг r. Если r = n, то система имеет только
154
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
тривиальное решение. Если r < n, то существует ровно n − r линейно независимых решений, называемых фундаментальной совокупностью решений, или фундаментальной системой решений.
Предположим, мы нашли базисный минор и он находится в левом
верхнем углу (в противном случае можно изменить порядок переменных
и уравнений). Оставим только те уравнения, коэффициенты которых вошли в базисный минор, то есть с первого по r-й. Неизвестные с номера
r + 1 до n называются свободными и переносятся в правую часть уравнений:
⎧
⎪
⎪
⎨ a11 x1 + . . . + a1r xr = −a1r+1 xr+1 − . . . − a1n xn ,
(3.59)
................................................
⎪
⎪
⎩ ar1 x1 + . . . + arr xr = −arr+1 xr+1 − . . . − arn xn .
Введем в рассмотрение квадратную матрицу
⎡
⎤
a11 . . . a1r
⎢ . .
⎥
.
. . ... ⎥ ,
C=⎢
⎣ .
⎦
(3.60)
ar1 . . . arr
при этом, согласно свойству базисного минора, выполняется неравенство
det C = 0.
Обозначим
⎡
⎤
⎡ ⎤
xr+1
x1
⎢
⎥
⎢ ⎥
⎢xr+2 ⎥
⎢ x2 ⎥
r
n−r
⎥
⎢
⎢
Y =⎢.⎥∈R , Z=⎢ . ⎥
(3.61)
⎥∈R .
.
.
.
.
⎦
⎣ ⎦
⎣
xr
xn
Далее выберем n − r линейно независимых векторов Z1 , Z2 , . . . , Zn−r .
Обычно берут наборы, образующие так называемый канонический базис в Rn−r :
⎡ ⎤
⎡ ⎤
⎡ ⎤
1
0
0
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢0⎥
⎢1⎥
⎢0⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
Z1 = ⎢0⎥ , Z2 = ⎢0⎥ , . . . , Zn−r = ⎢0⎥ .
(3.62)
⎢.⎥
⎢.⎥
⎢.⎥
⎢ .. ⎥
⎢ .. ⎥
⎢ .. ⎥
⎣ ⎦
⎣ ⎦
⎣ ⎦
0
0
1
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
155
Назовем F1 вектор правой части уравнения при заданном Z1 , . . . ,
Fn−r — при Zn−r .
В таком случае будем иметь системы уравнений в матричном виде:
⎧
⎪
⎪
⎨ C · Y1 = F1 ,
(3.63)
......
...
⎪
⎪
⎩ C · Yn−r = Fn−r .
По теореме Крамера решения Y1 , Y2 , . . . , Yn−r определены однозначно. Тогда полное решение системы будет состоять из векторов:
+
+
*
*
Y1
Yn−r
, . . . , Xn−r =
,
(3.64)
X1 =
Z1
Zn−r
которые линейно независимы, так как Z1 , . . . , Zn−r линейно независимы.
Совокупность решений X1 , X2 , . . . , Xn−r представляет собой фундаментальную систему решений (ФСР).
Если свободная неизвестная в системе одна, то ей придаем значение,
равное единице. Если свободных неизвестных нет, т. е. r = n, то такая
система имеет только тривиальное решение и, следовательно, фундаментальных решений нет.
Общее решение однородной системы будем обозначать Xо.о. :
Xо.о. = C1 X1 + C2 X2 + . . . + Cn−r Xn−r ,
(3.65)
где C1 , C2 , . . . , Cn−r — произвольные константы.
Пример 3.6. Найдем фундаментальную систему решений для однородной системы уравнений
⎧
⎪
⎪
⎨ 2x1 − 4x2 + 5x3 + 3x4 = 0,
(3.66)
3x1 − 6x2 + 4x3 + 2x4 = 0,
⎪
⎪
⎩ 4x1 − 8x2 + 17x3 + 11x4 = 0.
Решение.
Находим ранг матрицы данной системы
⎡
⎤
2 −4 5 3
⎢
⎥
⎢3 −6 4 2 ⎥
⎣
⎦
4 −8 17 11
путем приведения к верхнетреугольному виду.
(3.67)
156
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Вычитаем из третьей строки вторую. В результате получим:
⎡
⎤
2 −4 5 3
⎢
⎥
⎢3 −6 4 2⎥ ,
⎣
⎦
1 −2 13 9
меняем местами первую и третью строки:
⎡
⎤
1 −2 13 9
⎢
⎥
⎢3 −6 4 2⎥ .
⎣
⎦
2 −4 5 3
(3.68)
(3.69)
Из второй строки вычитаем первую строку, умноженную на 3, а из
третьей — удвоенную первую. Имеем:
⎡
⎤
1 −2 13
9
⎢
⎥
⎢0 0 −35 −25⎥ .
(3.70)
⎣
⎦
0 0 −21 −15
Делим вторую строку на (−5), а третью на (−3):
⎡
⎤
1 −2 13 9
⎢
⎥
⎢0 0 7 5⎥ .
⎣
⎦
0 0 7 5
Вычитаем из третьей строки вторую:
⎡
⎤
1 −2 13 9
⎢
⎥
⎢0 0 7 5⎥ .
⎣
⎦
0 0 0 0
(3.71)
(3.72)
Отсюда видно, что ранг данной матрицы равен двум.
В качестве базисного ненулевого минора возьмем, например, минор
1,2
исходной матрицы:
M3,4
5 3
(3.73)
.
4 2
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
157
Далее используем первые два уравнения, коэффициенты из которых
входят в базисный минор. Переносим в правую часть уравнений слагаемые, не входящие в базисный минор. Получаем:
5x3 + 3x4 = 4x2 − 2x1 ,
(3.74)
4x3 + 2x4 = 6x2 − 3x1 .
Свободным неизвестным x1 и x2 зададим два разных значения. Первый случай:
1
x1
=
.
(3.75)
x2
0
Подставляя эти значения в систему, получаем:
5x3 + 3x4 = −2,
(3.76)
4x3 + 2x4 = −3.
5
7
Решение этой системы: x3 = − и x4 = .
2
2
Второй случай:
0
x1
=
.
x2
1
Аналогично первому случаю, получаем:
5x3 + 3x4 = 4,
4x3 + 2x4 = 6.
(3.77)
(3.78)
При этом x3 = 5 и x4 = −7.
Окончательно для фундаментальной системы решений имеем:
⎡ ⎤ ⎧⎡
⎤ ⎡ ⎤⎫
⎪
1
x1
0 ⎪
⎪
⎪
⎢ ⎥ ⎪
⎪
⎢
⎥
⎢
⎥⎪
⎪
⎨
⎢x2 ⎥
⎢
⎥ ⎢ ⎥⎬
⎢ ⎥ ∈ ⎢ 0 ⎥,⎢ 1 ⎥ .
(3.79)
⎢x ⎥ ⎪⎢−5/2⎥ ⎢ 5 ⎥⎪
⎪
⎣
⎣ 3⎦ ⎪
⎦
⎣
⎦
⎪
⎪
⎪
⎪
⎩
⎭
x4
7/2
−7
Общее решение данной однородной системы может быть записано
как:
⎡ ⎤
⎡ ⎤
2
0
⎢ ⎥
⎢ ⎥
⎢0⎥
⎢ ⎥
⎥ + C2 ⎢ 1 ⎥ ,
(3.80)
Xо.о. = C1 ⎢
⎢−5⎥
⎢5⎥
⎣ ⎦
⎣ ⎦
−7
7
где C1 и C2 — произвольные числа.
158
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
3.5.
Общее решение неоднородной системы
уравнений
Рассмотрим неоднородную систему уравнений:
⎧
⎪
a11 x1 + a12 x2 + . . . + a1n xn = b1 ,
⎪
⎪
⎪
⎨ a x + a x + ... + a x = b ,
21 1
22 2
2n n
2
⎪
...........................
⎪
⎪
⎪
⎩
am1 x1 + am2 x2 + . . . + amn xn = bm .
(3.81)
Теорема 3.5. Пусть Xо.о. — общее решение однородной системы,
когда все величины bi заменены нулями, и Xч.н. — частное решение
неоднородной системы. Тогда Xо.н. — общее решение неоднородной системы — равно:
(3.82)
Xо.н. = Xо.о. + Xч.н. .
Пример 3.7. Решим систему:
⎧
⎪
2x1 + x2 − x3 − 3x4
⎪
⎪
⎪
⎨
4x1 + x3 − 7x4
⎪
2x2 − 3x3 + x4
⎪
⎪
⎪
⎩
2x1 + 3x2 − 4x3 − 2x4
= 2,
= 3,
= 1,
(3.83)
= 3.
Решение.
Выпишем расширенную матрицу системы:
⎡
⎤
2 1 −1 −3 | 2
⎢
⎥
⎢4 0 1 −7 | 3⎥
⎢
⎥
⎢0 2 −3 1 | 1⎥ .
⎣
⎦
2 3 −4 −2 | 3
(3.84)
Найдем ранг этой матрицы, для чего из второй строки вычтем удвоенную первую, а из четвертой — первую:
⎡
⎤
2 1 −1 −3 | 2
⎢
⎥
⎢0 −2 3 −1 | −1⎥
⎢
⎥
(3.85)
⎢0 2 −3 1 | 1 ⎥ .
⎣
⎦
0 2 −3 1 | 1
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
159
Видно, что последние три строки пропорциональны друг другу, и из
них достаточно оставить одну:
2 1 −1 −3 | 2
.
(3.86)
0 −2 3 −1 | −1
Ранг основной и расширенной матрицы равен двум, следовательно,
система совместна. Найдем общее решение однородной системы, для чего
x3 и x4 перенесем в правую часть уравнений. Получим:
2x1 + x2 = x3 + 3x4 ,
(3.87)
−2x2 = −3x3 + x4 .
Выберем следующие значения для независимых переменных:
1
x3
=
,
(3.88)
x4
0
в таком случае получаем систему
2x1 + x2 =
1,
−2x2 = −3,
3
1
откуда x2 = , x1 = − .
2
4
Теперь, выбирая значения
x3
x4
получаем систему
=
0
1
,
2x1 + x2 = 3,
−2x2 = 1,
(3.89)
(3.90)
(3.91)
1
7
решение которой x2 = − и x1 = .
2
4
Следовательно, общее решение однородной системы имеет вид:
⎡ ⎤
⎡ ⎤
7
1
−
⎢ 4⎥
⎢ 4 ⎥
⎢ 3 ⎥
⎢ 1⎥
⎢ ⎥
⎢− ⎥
⎥
⎢ ⎥
(3.92)
Xо.о. = C1 ⎢
⎢ 2 ⎥ + C2 ⎢ 2 ⎥ , где C1 , C2 ∈ R.
⎢ 1 ⎥
⎢ 0 ⎥
⎣ ⎦
⎣ ⎦
0
1
160
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
Если ввести в рассмотрение новые константы C1 = C1 /4, C2 = C2 /4,
то Xо.о. запишем в виде, свободном от дробей:
⎡ ⎤
⎡ ⎤
−1
7
⎢ ⎥
⎢ ⎥
⎢6⎥
⎢ ⎥
⎢−2⎥
⎥
Xо.о. = C1 ⎢
(3.93)
⎢ 4 ⎥ + C2 ⎢ 0 ⎥ , где C1 , C2 ∈ R.
⎣ ⎦
⎣ ⎦
0
4
Для нахождения частного решения вернемся к расширенной матрице (3.86). Уравнения для вычисления Xч.н. имеют вид:
2x1 + x2 = x3 + 3x4 + 2,
(3.94)
−2x2 = −3x3 + x4 − 1.
Полагая значения независимых переменных равными нулю, находим x1 =
1
3
= , x2 = , и
4
2
⎡ ⎤
3
⎢4⎥
⎢1⎥
⎢ ⎥
⎥
Xч.н. = ⎢
(3.95)
⎢2⎥ .
⎢0⎥
⎣ ⎦
0
В итоге, общее решение неоднородной системы равно
⎡ ⎤
⎡ ⎤
⎡ ⎤
−1
7
3
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢6⎥
⎢ ⎥ 1 ⎢2⎥
⎢−2⎥
⎢ ⎥
⎥
Xо.н. = Xо.о. + Xч.н. = C1 ⎢
⎢ 4 ⎥ + C2 ⎢ 0 ⎥ + 4 ⎢0⎥ , где C1 , C2 ∈ R.
⎣ ⎦
⎣ ⎦
⎣ ⎦
0
4
0
(3.96)
Контрольные вопросы к главе «Системы
линейных уравнений»
1. Дайте определение решения системы линейных уравнений.
2. Какая система уравнений называется совместной, несовместной?
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
161
3. В каком случае система уравнений является определенной, неопределенной?
4. Расскажите, как строится расширенная матрица системы линейных уравнений.
5. Опишите методы решения систем линейных уравнений: метод Гаусса, метод обратной матрицы, метод Крамера.
6. Чему равна асимптотическая сложность метода Гаусса?
7. Какое решение имеет любая однородная система линейных уравнений?
8. Дайте определение фундаментальной системы решений.
9. Как вычисляется общее решение неоднородной системы?
Задачи для самостоятельного решения
3.1. Для расширения компьютерной лаборатории ее заведующий планирует приобрести 9 рабочих станций и 7 ноутбуков. Если сделать
заказ на 14 рабочих станций и 9 ноутбуков, то стоимость закупки
возрастет в 1,5 раза. Определите, во сколько раз рабочая станция
стоит дороже ноутбука.
3.2. Решите системы линейных уравнений, используя
⎧
⎪
⎪
⎨ 2x1 − x2 + 3x3
3x − 5y = 13,
а)
б) 3x1 − 5x2 − x3
⎪
2x + 7y = 81;
⎪
⎩ 4x1 − 7x2 + x3
⎧
⎪
⎪
⎨
в)
⎧
⎪
⎪
⎨
д)
=
9,
= −10,
=
−7;
⎧
⎪
⎪
⎨ 2x − 4y + 9z = 28,
x + 2y + z = 4,
3x − 5y + 3z = 1,
⎪
⎪
⎩ 2x + 7y − z = 8;
метод Крамера:
г)
7x + 2y + 3z = 15,
5x − 3y + 2z = 15,
⎪
⎪
⎩ 10x − 11y + 5z = 36;
7x + 3y − 6z = −1,
⎪
⎪
⎩ 7x + 9y − 9z = 5;
⎧
⎪
⎪
⎨ x + y + z = 36,
е)
2x − 3z = −17,
⎪
⎪
⎩ 6x − 5z =
7;
162
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
⎧
⎪
⎪
⎨ 3x1 + 2x2 + x3 = 5,
ж)
x1 + x2 − x3 = 0,
⎪
⎪
⎩ 4x1 − x2 + 5x3 = 3.
3.3. Решите системы линейных
⎧
⎪
⎪
⎨ 6x1 + 2x2 + 3x3 =
а)
7x1 + 4x2 =
⎪
⎪
⎩
x 1 + x 2 + x3 =
⎧
⎪
⎪
⎨
в)
уравнений, используя метод Гаусса:
⎧
⎪
74,
⎪
⎨ 2x1 + 5x2 − 2x3 = −6,
91, б) −3x1 − 2x2 + x3 = 0,
⎪
⎪
⎩
18;
3x2 + 2x3 = −8;
3x1 − x2 + 6x3 =
⎧
⎪
⎪
⎨
−4,
2,
3x1 − 7x2 =
⎪
⎪
⎩ −4x1 − 4x2 − 3x3 = −10;
г)
5x1 + 3x2 − 3x3 =
8,
1,
−4x1 − 3x2 − 2x3 =
⎪
⎪
⎩ −2x1 + 3x2 + 6x3 = −29.
3.4. Решите системы линейных уравнений, используя метод Гаусса:
⎧
⎧
⎪
⎪
−2x
+7x
+4x
=
32,
−x1 −2x3 −x4 = −6,
1
2
3
⎪
⎪
⎪
⎪
⎪
⎪
⎨ −5x −x +6x +x = 23,
⎨ 2x +8x −x +7x = 63,
1
2
3
4
1
2
3
4
б)
а)
⎪
⎪
−6x1 +6x2 +8x3 −8x4 =
2,
5x1 −8x2 −9x3 +4x4 = 62,
⎪
⎪
⎪
⎪
⎪
⎪
⎩
⎩
6x2 −4x3 +5x4
⎧
⎪
⎪
⎪
⎪
⎨
в)
⎪
⎪
⎪
⎪
⎩
=
6x1 −9x2 −5x3 +x4
=
⎧
⎪
⎪
⎪
⎪
⎨
−8x1 +x2 −4x3 −8x4
=
7,
−7x2 −6x3 +7x4
=
56,
⎪
⎪
⎪
⎪
⎩
−8x1 +3x2 +2x3 −2x4
=
−63,
−8x1 −3x2 −x3 −4x4
=
−6.
58;
4x1 −9x3 −x4
=
37,
7x1 −x2 −5x3 −5x4
=
36,
8x1 −5x2 +4x4
=
−38,
x1 −4x2 +9x3 −4x4
=
−25;
г)
73;
∗ 3.5. Решите системы линейных уравнений относительно пяти неизвестных:
⎧
⎪
5x1 − 8x2 − 5x3 + 8x4 + 8x5 = −5,
⎪
⎪
⎪
⎪
⎪
8,
2x2 + 2x3 + x4 − x5 =
⎪
⎨
а) −2x1 + 4x2 + 3x3 − 8x4 + 4x5 = −39,
⎪
⎪
⎪
⎪
5x1 + 6x2 + 2x3 − 2x4 − 4x5 = 32,
⎪
⎪
⎪
⎩
x − 2x − x + 2x − 2x = 23;
1
2
3
4
5
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
⎧
⎪
6x1 − x2 + 6x3 + 3x4 − 7x5
⎪
⎪
⎪
⎪
⎪
⎪
⎨ −4x1 − 4x2 + 3x3 − x4 − 8x5
б)
−x1 + x2 + 5x4 − x5
⎪
⎪
⎪
⎪
4x1 + x2 − 3x3 + 3x4 − 5x5
⎪
⎪
⎪
⎩
8x + x − x
2
4
5
163
=
6,
= −30,
= −22,
=
−3,
= −61.
∗ 3.6. Решите системы линейных уравнений относительно шести неизвестных:
⎧
⎪
−x1 + 2x3 + 5x4 − 2x5 − 4x6
⎪
⎪
⎪
⎪
⎪
−x1 − x2 + x3 − 3x4 + x5 − 4x6
⎪
⎪
⎪
⎨
−x1 + 5x2 + 4x3 − 2x5 − x6
а)
⎪
x1 − 2x2 + 4x3 − 2x5 − x6
⎪
⎪
⎪
⎪
⎪
−2x1 − 5x2 + 3x3 − 2x4 − 3x5
⎪
⎪
⎪
⎩
3x1 + x2 + 3x3 + x6
=
4,
= −46,
= −19,
−9,
=
= −20,
=
⎧
⎪
−2x1 − 4x2 − 4x5 + 5x6
⎪
⎪
⎪
⎪
⎪
−x1 + 5x2 + 3x3 + 5x5
⎪
⎪
⎪
⎨ −2x − 5x + 5x − 3x − 5x − 3x
1
2
3
4
5
6
б)
⎪
−4x1 − 5x2 − 3x3 + 5x4 − 2x5 + 3x6
⎪
⎪
⎪
⎪
⎪
x1 + 3x2 − 5x3 + 4x4 + 3x5 + 2x6
⎪
⎪
⎪
⎩
−4x1 + x2 − 4x3 + 3x4 + x5 − x6
4;
=
2,
= −12,
=
−7,
=
10,
=
8,
=
3.
3.7. Найдите полином четвертой степени p(x) с вещественными коэффициентами, для которого выполняются следующие свойства:
p(5) = 1 и p(1) = p(2) = p(3) = p(4) = 0.
3.8. При каких значениях параметра λ система уравнений
⎧
⎪
⎪
⎨ x1 + x2 = 1,
λx1 + x2 = 2,
⎪
⎪
⎩ x1 + λx2 = 4.
совместна?
164
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
3.9. При каких значениях параметра λ система линейных уравнений
⎧
⎪
x1 + λx2 = 0,
⎪
⎨
−x1 + x2 − x3 = 5,
⎪
⎪
⎩
−x2 + x3 = −4,
имеет единственное решение? При этих значениях λ найдите решение системы, используя правило Крамера.
∗ 3.10. Решите матричное уравнение A · X · B = C, где
⎡
⎤
⎡
⎤
−3 2 3
−13 0
⎢
⎥
⎢
⎥
⎥ , B = −1 0 , C = ⎢−25 0⎥ .
A=⎢
−2
1
4
⎣
⎦
⎣
⎦
−1 0
6 1 2
−33 0
(3.97)
Обратите внимание на вырожденность одного из сомножителей, а
именно матрицы B.
∗ 3.11. Решите матричные уравнения:
6 2
−4 4
1)
·X =
;
3 1
−2 2
15 −5
1 −1
2) X ·
=
;
−3 1
−2 1
⎤ ⎡
⎡
6 19
6
−1 1
⎥ ⎢
⎢
⎥
⎢
⎢
3) X · ⎣−10 −5 6 ⎦ = ⎣ 10 5
−6
−20 23
⎤
⎡
−1 2
5
−7
⎢
⎥
⎢
⎢
⎥
⎢
4) ⎣ 5 3 −1 ⎦ · X = ⎣ 2
7 −1 −11
1
⎡
0
−22
⎥
−6 ⎥
⎦;
−19
8
7
⎤
22
⎤
2
⎥
1⎥
⎦.
−1 1
3.12. Дан фрагмент программы, обрабатывающий одномерный массив
a, состоящий из пяти элементов:
for i in range(len(a)):
temp = a[0]
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
165
for j in range(len(a) - 1):
a[j] = -2 * a[j + 1]
a[len(a) - 1] += temp
После выполнения этого фрагмента программного кода массив a[]
состоит из следующих элементов: [-32, 32, 32, 32, 16]. Определите, какие значения принимали элементы массива a[i], где
i = 1, . . . , 5, перед выполнением этого фрагмента.
3.13. Дан фрагмент программы, обрабатывающий одномерный массив
a, состоящий из семи элементов:
for i in range(len(a)):
temp = a[0]
for j in range(len(a) - 1):
a[j] = 3 * a[j + 1] - 1
a[len(a) - 2] = -a[len(a) - 2] - temp
После выполнения этого фрагмента программного кода массив a[]
состоит из следующих элементов: [365, 608, -769, -499, -409,
107, 5]. Определите, какие значения принимали элементы массива a[i], i = 1, . . . , 7, перед выполнением этого фрагмента.
3.14. Существует модификация метода Гаусса, которая носит название
метод Гаусса – Жордана5 . В методе Гаусса – Жордана матрица
коэффициентов системы уравнений приводится не к треугольному,
а к диагональному виду. Напишите реализацию этого метода на
Python и сравните ее асимптотическую сложность со сложностью
стандартного метода Гаусса.
3.15. Найдите общее решение и фундаментальную систему решений для
систем уравнений:
⎧
⎧
⎪
⎪
−
4x
+
x
=
0,
x
⎪
⎪
2
3
⎨ 2x1 − x2 + 3x3 + x4 = 0,
⎨ 1
1)
2x1 − 5x2 − x3 = 0,
x1 + x2 − x3 = 0, 2)
⎪
⎪
⎪
⎪
⎩ 4x1 − 7x2 + x3 + 3x4 = 0;
⎩ 3x1 − 2x2 − x3 = 0;
5
Жордан (Wilhelm Jordan) (1842–1899) — немецкий геодезист и математик.
166
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
⎧
⎪
⎪
⎪
⎪
⎨
3)
⎪
⎪
⎪
⎪
⎩
⎧
⎪
3x1 + 5x2 + 2x3
⎪
⎪
⎪
⎨
= 0,
4x1 + 7x2 + 5x3
4)
⎪
= 0,
x1 + x2 − 4x3
⎪
⎪
⎪
⎩
= 0;
2x1 + 9x2 + 6x3
x1 + 2x2 + 4x3 − 3x4 = 0,
3x1 + 5x2 + 6x3 − 4x4
4x1 + 5x2 − 2x3 + 3x4
3x1 + 8x2 + 24x3 − 19x4
⎧
⎪
2x1 + 4x2 + 6x3 + x4
⎪
⎪
⎪
⎨ x + 2x + 3x + x
1
2
3
4
5)
⎪
3x1 + 6x2 + 9x3 − x4
⎪
⎪
⎪
⎩
x1 + 2x2 + 3x3 + 5x4
⎧
⎪
⎪
⎪
⎪
⎨
7)
= 0,
= 0,
= 0,
= 0;
⎧
⎪
⎪
⎨ x + 2y + 3z = 0,
= 0,
6) 2x + 3y + 4z = 0,
⎪
= 0,
⎪
⎩
x + y + z = 0;
= 0;
= 0,
x1 − 2x2 + 3x3 − 4x4 = 0,
2x1 − 4x2 + 5x3 + 7x4 = 0,
⎪
6x1 − 12x2 + 17x3 − 9x4 = 0,
⎪
⎪
⎪
⎩
7x1 − 14x2 + 19x3 + 17x4 = 0.
Ответы и решения к главе «Системы
линейных уравнений»
3.1. Решение.
Обозначим стоимость одной рабочей станции через x, а ноутбука —
через y. Пусть стоимость 9 рабочих станций и 7 ноутбуков равна a. Тогда
получаем систему линейных уравнений относительно неизвестных x и y:
⎧
⎨ 9x + 7y = a,
⎩ 14x + 9y = 3 a.
2
1
3
Ее решение x = a, y = a. Следовательно, рабочая станция дороже
34
34
ноутбука в три раза.
3.2. Решение.
а)
Расширенная
матрица системы имеет вид
3 −5 | 13
.
2 7 | 81
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
167
Вычислим
необходимые
определители:
3 −5
Δ=
= 21 + 10 = 31,
2 7 13 −5
Δx = = 91 + 405 = 496.
81 7 496
Δx
= 16.
=
Следовательно, x =
Δ
31
3 13
Δy = = 243 − 26 = 217,
2 81
217
Δy
= 7.
=
y=
Δ
31
б) Расширенная матрица системы имеет вид
⎡
⎤
2 −1 3 | 9
⎢
⎥
⎢3 −5 −1 | −10⎥.
⎣
⎦
4 −7 1
2 −1
Δ = 3 −5
4 −7
9
Δ1 = −10
−7
| −7
3
11 −16 0 −1 =(1)+3(2) 3 −5 −1 = 11 · (−12) + 16 · 7 = −20,
4 −7 1 1
−1 3 −21 −16 0 (1)+3(2) −10 −5 −1 =(3)+(2)
−5 −1 =
−7 −7 1 −7 1 −21 −16 0 = −10 −5 −1 = 252 − 272 = −20,
−17 −12 0 −20
Δ1
x1 =
= 1,
=
−20 Δ
3
2 9
11 −21 0 Δ2 = 3 −10 −1 =(1)+3(2) 3 −10 −1 =(3)+(2)
4 −7 1 4 −7 1 11 −21 0 = 3 −10 −1 = −(−1)(−187 + 147) = −40,
7 −17 0 168
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
−40
Δ2
= 2,
=
−20 Δ
0 −1 9 2 −1 9 [1]+2[2] −7 −5 −10 =
Δ3 = 3 −5 −10 =
−10 −7 −7 4 −7 −7 = (49 − 100) + 9(49 − 50) = −60,
Δ3
−60
x3 =
= 3.
=
Δ
−20
в)
матрица системы имеет вид
⎡ Расширенная ⎤
1 2 1 | 4
⎢
⎥
⎢3 −5 3 | 1⎥.
⎣
⎦
x2 =
7 −1 | 8
1 2 1 0 2 1 Δ = 3 −5 3 =[1]−[3] 0 −5 3 = 3 · (6 + 5) = 33,
2 7 −1
3 7 −1
4 2 1 4 2 1 Δx = 1 −5 3 =(3)−2(1) 1 −5 3 = 4 · (15 − 9) − (−6 − 3) = 33,
8 7 −1
0 3 −3
33
Δx
=
= 1,
x=
Δ
33 1
1 4 1 1 0
Δy = 3 1 3 =[2]−4[1] 3 −11 3 = −11 · (−1 − 2) = 33,
2 0 −1
2 8 −1
33
Δy
= 1,
=
y=
Δ
33 1 2 4
1 2 4
(3)−2(1) 3 −5 1 = −3 · (1 − 12) = 33,
Δz = 3 −5 1 =
0 3 0
2 7 8
33
Δz
= 1.
=
z=
Δ
33
г)
системы имеет вид
⎡ Расширенная матрица
⎤
2 −4 9 | 28
⎢
⎥
⎢7 3 −6 | −1⎥.
⎣
⎦
2
7
9
−9 |
5
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
169
2 −4 9 2 −4 9 (3)−(2) 7 3 −6 = 2(−9 + 36) − 7(12 − 54) = 348,
Δ = 7 3 −6 =
0 6 −3
7 9 −9
28 −4 9 33 5 0 (1)+(3) −1 3 −6 = 6(297 − 25) − 9(99 + 5) =
Δx = −1 3 −6 =
5 9 −9
5 9 −9
= 696,
696
= 2,
x=
348
2 28 9 2 28 9 Δy = 7 −1 −6 =(3)−(2) 7 −1 −6 = 2(3 + 36) − 7(−84 − 54) =
7 5 −9
0 6 −3
= 1044,
1044
y=
= 3,
348
2
−4
28
2
−4
28
(3)−(2) = 2(18 + 6) − 7(−24 − 168) =
Δz = 7 3 −1 =
7
3
−1
7 9 5 0 6 6 = 1392,
1392
= 4.
z=
348
д) Расширенная матрица системы имеет вид
⎡
⎤
7
2 3 | 15
⎢
⎥
⎢ 5 −3 2 | 15⎥.
⎣
⎦
10 −11 5 | 36
2 3
7 2 3
7
(3)−2(2) 5 −3 2 = 5(14 − 15) + (−21 − 10) = −36,
Δ = 5 −3 2 =
0 −5 1
10 −11 5
3
15 2 3
15 2
Δx = 15 −3 2 =(2)−(1) 0 −5 −1 = −72,
36 −11 5 36 −11 5
x=
−72
= 2,
−36
170
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
7 15 3 7 15 3
(2)−(1) −2 0 −1 = 2(75−108)+(252−150) = 36,
Δy = 5 15 2 =
10 36 5 10 36 5
36
= −1,
y=
−36
7 2 15
Δz = 5 −3 15 = −36,
10 11 36
−36
= 1.
z=
−36
е)
системы имеет вид
⎡ Расширенная матрица
⎤
1 1 1 | 36
⎢
⎥
⎢2 0 −3 | −17⎥.
⎣
⎦
6 0 −5 | 7
1 1 1 Δ = 2 0 −3 = −(−10 + 18) = −8,
6 0 −5
36 1 1 Δx = −17 0 −3 = −(85 + 21) = −106,
7 0 −5
−106 53
= .
x=
−8
4 1
36
1
1
36
1
(3)−3(2) Δy = 2 −17 −3 = (2)−2(1) 0 −89 −5 = −356 + 290 = −66,
0 58 4 6 7 −5
−66 33
= ,
y=
−8
4 1 1 36 Δz = 2 0 −17 = −(14 + 17 · 6) = −116,
6 0 7 −116 29
= .
z=
−8
2
ж) Расширенная матрица системы имеет вид
Powered by TCPDF (www.tcpdf.org)
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
⎡
3
2
1
| 5
171
⎤
⎢
⎥
⎢1 1 −1 | 0⎥.
⎣
⎦
4 −1 5 | 3
3 2 1 1 2 1 1 2 3
[1]−[2] [3]+[2] 0 1 −1 =
0 1 0 = 4 − 15 =
Δ = 1 1 −1 =
4 −1 5 5 −1 4 5 −1 4
= −11, 5 2 3
5 2 1 Δ1 = 0 1 −1 =[3]+[2] 0 1 0 = 20 − 9 = 11,
3 −1 5 3 −1 4
11
x1 =
= −1.
−11
3 5 1 4 5 1 Δ2 = 1 0 −1 =[1]+[3] 0 0 −1 = 12 − 45 = −33,
4 3 5 9 3 5 −33
= 3,
x2 =
−11
3 2 5 1 2 5
Δ3 = 1 1 0 =[1]−[2] 0 1 0 = 3 − 25 = −22,
4 −1 3
5 −1 3
−22
x3 =
= 2.
−11
3.3. Решение.
а) Выполним следующие элементарные преобразования расширенной
матрицы
системы:⎤
⎡
⎤
⎡
0 −4 −3 | −34
6 2 3 | 74
⎥
⎢
⎥ (1)−6(3) ⎢
⎢7 4 0 | 91⎥ →(2)−7(3) ⎢0 −3 −7 | −35⎥ →−3·(1)
⎣
⎦
⎣
⎦
⎡
1 1 1 | 18
0 12
9
| 102
⎤
1
1
⎡
0
1
|
0
−19 | −38
18
⎤
⎢
⎥ (1)+4(2) ⎢
⎥
⎥→
⎢0 −3 −7 | −35⎥.
→⎢
0
−3
−7
|
−35
⎣
⎦
⎣
⎦
1 1 1 | 18
1 1
1 | 18
38
= 2,
Отсюда следует, что x3 =
19
−3x2 = −35 + 14 = −21, x2 = 7,
172
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
x1 = 18 − 2 − 7 = 9.
Окончательный ответ: [x1 , x2 , x3 ]T = [9, 7, 2]T .
б) Выполним следующие элементарные преобразования расширенной
матрицы
системы:
⎡
⎤
⎡
⎤
2 5 −2
⎢
⎢−3 −2 1
⎣
0 3 2
⎡
2 5 −2 |
⎢
→⎢
⎣0 11 −4 |
0 3 2 |
⎡
2 5 −2 |
⎢
⎢
→ ⎣0 11 −4 |
0 0
| −6
2 5 −2 | −6
⎥ 2·(2) ⎢
⎥
⎢−6 −4 2 | 0 ⎥ →(2)+3(1)
→
| 0⎥
⎦
⎣
⎦
| −8
0 3 2 | −8
⎡
⎤
⎤
−6
2 5 −2 | −6
⎥
⎥ 11·(3) ⎢
⎢0 11 −4 | −18⎥ →(3)−3(2)
−18⎥
⎦→
⎣
⎦
0 33 22 | −88
−8
⎤
−6
⎥
−18⎥
⎦.
34 | −34
−34
= −1,
34
11x2 = −18 − 4 = −22, x2 = −2,
2x1 = −6 − 2 + 10 = 2, x1 = 1.
Получаем ответ: [x1 , x2 , x3 ]T = [1, −2, 1]T .
в) Выполним следующие элементарные преобразования расширенной
матрицы
системы:
⎡
⎤
⎡
⎤
Отсюда следует, что x3 =
3
⎢
⎢3
⎣
−4
⎡
12
⎢
→⎢
⎣0
−4
⎡
0
⎢
⎢
→⎣ 0
⎡
−1
6
| −4
−7
0
|
−4 −3 |
−4 24 |
−6 −6 |
−4 −3 |
−16
15
−48 −48
−4 −4
3 −1 6 | −4
⎥ (2)−(1) ⎢
⎥
⎢ 0 −6 −6 | 6 ⎥ →4·(1)
→
2 ⎥
⎦
⎣
⎦
−10
−4 −4 −3 | −10
⎤
⎡
⎤
0 −16 15 | −46
−16
⎥ (1)+3(3) ⎢
⎥
⎢ 0 −6 −6 | 6 ⎥ →(2)·8
→
6 ⎥
⎣
⎦
⎦
−4 −4 −3 | −10
−10
⎤
⎡
⎤
0 −16 15 | −46
| −46
⎥ (2)−3(1) ⎢
⎥ (1)↔(2)
⎢0
⎥ →(3)↔(1)
→
0
−93
|
186
| 48 ⎥
⎣
⎦
⎦
−3 | −10
⎤
−4 −4 −3 | −10
⎢
⎥
⎢
→ ⎣ 0 −16 15 | −46⎥
⎦.
0
0 −93 | 186
Отсюда следует, что x3 = −2,
−4 −4
−3 | −10
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
173
−16x2 = −46 + 30 = −16, x2 = 1,
−4x1 = −10 − 6 + 4 = −12, x1 = 3.
Получаем ответ: [x1 , x2 , x3 ]T = [3, 1, −2]T .
г) Выполним следующие элементарные преобразования расширенной
матрицы
системы:
⎡
⎤
⎡
⎤
5
⎢
⎢−4
⎣
−2
⎡
10
⎢
→⎢
⎣0
−2
⎡
0
⎢
⎢
→⎣ 0
−3 |
−3 −2 |
3
6
6
5 3
⎥ (2)−2(3) ⎢
⎢ 0 −9
1 ⎥
⎣
⎦→
−2 3
−29
⎡
⎤
16
0 21
⎥ (1)+5(3) ⎢
⎢ 0 −9
59 ⎥
⎦→
⎣
−29
−2 3
⎡
⎤
−43
0
7
⎥ 7·(2) ⎢
⎢
⎥
59 ⎦ → = ⎣ 0 −63
8
|
−6 |
−9 −14 |
3
6
|
7
8
|
−9 −14 |
−3 |
3
6
8
⎥ 2·(1)
59 ⎥
⎦→
6 | −29
⎤
24 | −129
⎥ 1 (1)
3
−14 | 59 ⎥
⎦→
−14 |
| −29
⎤
8 | −43
⎥ (2)+9(1)
−98 | 413 ⎥
⎦→
−2 3
6 | −29
⎡
⎤
−2 3 6 | −29
⎢
⎥
⎢ 0 7 8 | −43⎥.
⎣
⎦
6
| −29
⎤
0 7 8 | −43
⎢
⎥ (1)↔(3)
(3)↔(2)
⎢
→ ⎣ 0 0 −26 | 26 ⎥
⎦→
−2 3 6 | −29
0 0 −26 |
Отсюда следует, что x3 = −1,
7x2 = −43 + 8 = −35, x2 = −5,
−2x1 = −29 + 6 + 15 = −8, x1 = 4.
Получаем ответ: [x1 , x2 , x3 ]T = [4, −5, −1]T .
⎡
−2
3
26
3.4. Решение.
а) Выполним следующие элементарные преобразования расширенной
матрицы системы:
⎡
⎡
⎤
⎤
−2 7 4 0 | 32
0 15 3 7 | 95
⎢
⎢
⎥
⎥
⎢ 2 8 −1 7 | 63⎥ (1)+(2) ⎢ 2 8 −1 7 | 63⎥
⎢
⎢
⎥
⎥
⎢−3 3 4 −4 | 1 ⎥ →
⎢−3 3 4 −4 | 1 ⎥ =
⎣
⎣
⎦
⎦
0 6 −4 5 | 58
0 6 −4 5 | 58
⎡
⎡
⎤
⎤
2 8 −1 7 | 63
2 8 −1 7 | 63
⎢
⎢
⎥
⎥
⎢ 0 15 3 7 | 95⎥ 2(4)+3(1) ⎢0 15 3 7 | 95 ⎥ 2·(2)
⎢
⎢
⎥
⎥
=⎢
⎢0 6 −4 5 | 58 ⎥ →
⎥→
0
6
−4
5
|
58
⎣
⎣
⎦
⎦
0 30 5 13 | 191
−3 3 4 −4 | 1
174
⎡
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
2 8 −1 7 | 63
⎢
⎢0
→⎢
⎢0
⎣
0
⎡
2
⎢
⎢0
→⎢
⎢0
⎣
0
⎤
⎡
2 8 −1
7
|
63
⎤
⎥
⎥ (2)−(4) ⎢
⎢
14 | 190⎥
1 | −1 ⎥
⎥ (4)−25(2)
⎥ →(4)−5(3) ⎢0 0 1
⎢0 6 −4 5 | 58 ⎥ →
6 −4 5 | 58 ⎥
⎣
⎦
⎦
0 0 25 −12 | −99
30 5 13 | 191
⎤
8 −1 7 | 63
⎥
6 −4 5 | 58 ⎥
⎥,
0 1
1 | −1 ⎥
⎦
0 0 −37 | −74
−74
= 2,
x4 =
−37
x3 = −1 − 2 = −3,
6x2 = 58 − 12 − 10 = 36, x2 = 6,
2x1 = 63 − 48 − 3 − 14 = −2, x1 = −1.
Запишем ответ: [x1 , x2 , x3 , x4 ]T = [−1, 6, −3, 2]T .
б) Выполним следующие элементарные преобразования расширенной
матрицы системы:
⎡
⎡
⎤
⎤
1 0 2 1 | 6
−1 0 −2 −1 | −6
⎢
⎢
⎥
⎥
⎢−5 −1 6 1 | 23 ⎥ (1)·(−1) ⎢−5 −1 6 1 | 23⎥ (3)+(2)
⎢
⎢
⎥
⎥
⎢ 5 −8 −9 4 | 62⎥ →
⎢ 5 −8 −9 4 | 62 ⎥ →
⎣
⎣
⎦
⎦
6 −9 −5 1 | 73
6 −9 −5 1 | 73
⎡
⎡
⎤
⎤
1 0 2 1 | 6
1 0
2
1 | 6
⎢
⎢
⎥
⎥
⎢−5 −1 6 1 | 23⎥ (2)+5(1) ⎢0 −1 16 6 | 53⎥ (4)−(3)
⎢
⎥ →(4)−6(1) ⎢
⎥
⎢ 0 −9 −3 5 | 85⎥
⎢0 −9 −3 5 | 85⎥ →
⎣
⎣
⎦
⎦
6 −9 −5 1 | 73
0 −9 −17 −5 | 37
⎡
⎡
⎤
⎤
1 0
2
1 | 6
1 0 2 1 | 6
⎢
⎢
⎥
⎥
⎢0 −1 16
⎢
⎥ (3)−9(2)
6 | 53 ⎥
−1
(4) ⎢0 −1 16 6 | 53⎥
⎢
⎥
2
→⎢
→
⎢0 −9 −3 5 | 85⎥ →
5 | 85 ⎥
⎣
⎣0 −9 −3
⎦
⎦
0 0 7 5 | 24
0 0 −14 −10 | −48
⎡
⎡
⎤
⎤
1 0 2 1 | 6
1 0
2
1 |
6
⎢
⎢
⎥
⎥
⎢0 −1 16
⎥ (3)+21(4) ⎢0 −1 16 6 | 53 ⎥ (3)↔(4)
6
|
53
⎢
⎥
⎥
→⎢
⎢0 0 0 56 | 112⎥ →
⎢0 0 −147 −49 | −392⎥ →
⎣
⎣
⎦
⎦
0 0 7 5 | 24
0 0
7
5 | 24
30
6
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
⎡
1
0
2
1 |
6
175
⎤
⎢
⎥
⎢0 −1 16 6 | 53 ⎥
⎢
⎥,
→⎢
⎥
0
0
7
5
|
24
⎣
⎦
0 0 0 56 | 112
112
= 2,
x4 =
56
7x3 = 24 − 10 = 14, x3 = 2,
−x2 = 53 − 12 − 32, x2 = −9,
x1 = 6 − 2 − 4 = 0.
Запишем ответ: [x1 , x2 , x3 , x4 ]T = [0, −9, 2, 2]T .
в) Выполним следующие элементарные преобразования расширенной
матрицы системы:
⎡
4
0
−9 −1 |
37
⎤
(1)−4(4)
(2)−7(4)
(3)−8(4)
(1)↔(2)
(1)↔(4)
→ (3)↔(4) =
⎡
1 −4
9
−4 | −25
⎤
⎢
⎥
⎢0 16 −45 15 | 137 ⎥ 1 ·(4)
⎢
⎥
⎢0 27 −68 23 | 211 ⎥ → 9
⎣
⎦
0 27 −72 36 | 162
1 −4 9 −4 | −25
⎡
⎡
⎤
⎤
1 −4 9
−4 | −25
1 −4 9 −4 | −25
⎢
⎢
⎥
⎥
⎢0 16 −45 15 | 137 ⎥ (3)−9(4) ⎢0 16 −45 15 | 137 ⎥ 3·(2)
⎢
⎢
⎥
⎥→
→⎢
⎢0 0
⎥
⎥→
4
−13
|
49
0
27
−68
23
|
211
⎣
⎣
⎦
⎦
0 3 −8
4 | 18
0 3 −8 4 | 18
⎡
⎡
⎤
⎤
1 −4 9 −4 | −25
1 −4
9
−4 | −25
⎢
⎢
⎥
⎥
⎢0 48 −135 45 | 411 ⎥ (2)−16(4) ⎢0 0 −7 −19 | 123 ⎥ 4·(2)
⎢
⎢
⎥
⎥
→⎢
⎢0 0 4 −13 | 49 ⎥ →
⎥→
0
0
4
−13
|
49
⎣
⎣
⎦
⎦
0 3 −8 4 | 18
0 3
−8
4 | 18
⎡
⎡
⎤
⎤
1 −4 9
−4 | −25
1 −4 9
−4 | −25
⎢
⎢
⎥
⎥
⎢0 0 −28 −76 | 492 ⎥ (2)+7(3) ⎢0 3 −8
4
| 18 ⎥
(2)↔(4)
⎢
⎢
⎥
⎥
→⎢
⎢0 0 4 −13 | 49 ⎥,
⎥→
0
0
4
−13
|
49
⎣
⎣
⎦
⎦
0 0 0 −167 | 835
0 3 −8
4 | 18
835
= −5,
x4 =
−167
4x3 = 49 − 65 = −16, x3 = −4,
3x2 = 18 − 32 + 20 = 6, x2 = 2,
x1 = −25 + 8 + 36 − 20 = −1.
Запишем ответ: [x1 , x2 , x3 , x4 ]T = [−1, 2, −4, −5]T .
⎢
⎥
⎢7 −1 −5 −5 | 36 ⎥
⎢
⎥
⎢8 −5 0 4 | −38⎥
⎣
⎦
176
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
г) Выполним следующие элементарные преобразования расширенной
матрицы
системы:
⎡
⎡
⎤
⎤
−8 1 −4 −8 | 7
−8 1 −4 −8 | 7
⎢
⎢
⎥
⎥
⎢ 0 −7 −6 7 | 56 ⎥ (3)−(1) ⎢ 0 −7 −6 7 | 56 ⎥ 1 (3)
⎢
⎥
⎥ →(4)−(1) ⎢
⎢ 0 2 6 6 | −70⎥ → 2
⎢−8 3 2 −2 | −63⎥
⎣
⎣
⎦
⎦
0 −4 3 4 | −13
−8 −3 −1 −4 | −6
⎡
⎡
⎤
⎤
−8 1 −4 −8 | 7
−8 1 −4 −8 |
7
⎢
⎢
⎥
⎥
⎢ 0 −7 −6 7 | 56 ⎥ (2)+7(3) ⎢ 0 0 15 28 | −189⎥ (4)−(2)
(4)+4(3)
⎢
⎢
⎥
⎥
→⎢
⎢ 0 1 3 3 | −35 ⎥ →
⎥→
0
1
3
3
|
−35
⎣
⎣
⎦
⎦
0 −4 3 4 | −13
0 0 15 16 | −153
⎡
⎤
−8 1 −4 −8 |
7
⎢
⎥
⎢ 0 0 15 28 | −189⎥
⎥,
→⎢
⎢0 1 3
3 | −35 ⎥
⎣
⎦
0 0 0 −12 | 36
36
= −3,
x4 =
−12
15x3 = 84 − 189, x3 = −7,
x2 = −35 + 9 + 21 = −5,
−8x1 = 7 − 24 − 28 + 5 = −40, x1 = 5.
Запишем ответ: [x1 , x2 , x3 , x4 ]T = [5, −5, −7, −3]T .
3.5. Ответ:
а) [x1 , x2 , x3 , x4 , x5 ]T = [6, −6, 7, 0, −6]T ;
б) [x1 , x2 , x3 , x4 , x5 ]T = [6, −7, −1, −1, 4]T .
3.6. Ответ:
а) [x1 , x2 , x3 , x4 , x5 , x6 ]T = [5, 0, −5, 5, −5, 4]T ;
б) [x1 , x2 , x3 , x4 , x5 , x6 ]T = [1, −2, −2, 0, 1, 0]T .
3.7. Решение.
Полином четвертой степени с вещественными коэффициентами можно представить в виде:
p(x) = a4 x4 + a3 x3 + a2 x2 + a1 x + a0 ,
где a0 , a1 , . . . , a4 ∈ R — неизвестные коэффициенты. Получаем систему
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
177
линейных уравнений относительно коэффициентов ai :
⎧
⎪
54 a4 + 53 a3 + 52 a2 + 5a1 + a0 = 1,
⎪
⎪
⎪
⎪
4
3
2
⎪
⎪
⎨ 1 a4 + 1 a3 + 1 a2 + 1a1 + a0 = 0,
24 a4 + 23 a3 + 22 a2 + 2a1 + a0 = 0,
⎪
⎪
⎪
⎪
34 a4 + 33 a3 + 32 a2 + 3a1 + a0 = 0,
⎪
⎪
⎪
⎩ 44 a + 43 a + 42 a + 4a + a = 0.
4
3
2
1
0
Запишем матрицу этой
⎡
625 125 25 5
⎢
⎢ 1
1 1 1
⎢
⎢
⎢ 16 8 4 2
⎢
⎢ 81 27 9 3
⎣
256 64 16 4
системы и приведем ее к
⎤
⎡
1 | 1
1 1 1 1
⎥
⎢
⎢0 8 12 14
1 | 0⎥
⎥
⎢
⎥
⎢
1 | 0⎥ → ⎢0 0 6 9
⎥
⎢
⎢0 0 0 24
1 | 0⎥
⎦
⎣
1 | 0
0 0 0 0
Находим значения ai :
⎧
⎪
a4 + a3 + a2 + a1 + a0
⎪
⎪
⎪
⎪
⎪
⎪
⎨ 8a3 + 12a2 + 14a1 + 15a0
6a2 + 9a1 + 10a0
⎪
⎪
⎪
⎪
24a1 + 50a0
⎪
⎪
⎪
⎩
a
0
= 0,
= 0,
= 0,
= 0,
= 1;
ступенчатому виду:
⎤
1 | 0
⎥
15 | 0⎥
⎥
⎥
10 | 0⎥ .
⎥
50 | 0⎥
⎦
1 | 1
⎧
⎪
a0 = 1,
⎪
⎪
⎪
⎪
50
⎪
⎪
a1 = − ,
⎪
⎪
⎪
24
⎪
⎪
⎨
35
,
a2 =
⇒
24
⎪
⎪
⎪
10
⎪
⎪
a3 = − ,
⎪
⎪
24
⎪
⎪
⎪
⎪
1
⎪
⎩ a4 =
.
24
В результате искомый полином четвертой степени равен
p(x) =
1 4
(x − 10x3 + 35x2 − 50x + 24).
24
3.8. Решение.
Система линейных уравнений совместна тогда и только тогда, когда
ранг матрицы системы равен рангу расширенной матрицы системы.
Найдем ранг основной матрицы:
⎡
⎤
1 1
⎢
⎥
⎢
A = ⎣λ 1 ⎥
⎦.
1 λ
178
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
⎡
⎤
1
A→
(2)−λ(1) ⎢
(3)−(1) ⎢0
⎣
⎡
1
⎤
1
1
0
0
⎥
⎢
⎥
(3)+(2) ⎢
⎥.
→
1 − λ⎥
0
1
−
λ
⎦
⎣
⎦
0 λ−1
Следовательно,
rk A =
2, если λ = 1,
1, если λ = 1.
Вычислим ранг расширенной матрицы:
⎡
⎤
⎡
⎤
1
1
|
1
1 1 | 1
(2)−λ(1) ⎢
⎥
⎢
⎥
⎥ → (3)−(1) ⎢0 1 − λ | 2 − λ⎥ → (2)+(3)
(A|B) = ⎢
λ
1
|
2
⎣
⎦
⎣
⎦
0 λ−1 |
3
1 λ | 4
⎡
⎤
1
1
|
0
0
| 5−λ
1
⎢
⎥
⎥.
→⎢
0
1
−
λ
|
2
−
λ
⎣
⎦
Таким образом,
rk (A|B) =
2, если λ = 5,
3, если λ = 5.
Условие rk A = rk (A|B) выполняется при λ = 5. Следовательно,
система совместна при λ = 5.
3.9. Ответ: система имеет единственное решение при λ = 0. Для
таких значений λ решение системы имеет вид x1 = −1, x2 = λ−1 , x3 =
= λ−1 − 4.
3.10. Решение.
Поскольку матрица A имеет размер 3 × 3, а матрица B — размер
2 × 2, то неизвестная матрица X представима в виде:
⎡
⎤
a b
⎢
⎥
⎢
X = ⎣c d⎥
⎦ , где a, b, c, d, e, f — некоторые вещественные числа.
e f
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
179
Подставив эту матрицу в уравнение A · X · B = C, получим систему
линейных уравнений относительно неизвестных a, b, . . . , f :
⎧
⎪
⎪
⎨ 3a + 3b − 2c − 2d − 3e − 3f = −13,
2a + 2b − c − d − 4e − 4f = −25,
⎪
⎪
⎩−6a − 6b − c − d − 2e − 2f = −33.
Приведем расширенную матрицу систему к ступенчатому виду:
⎡
3
3
−2 −2 −3 −3 | −13
⎤
⎢
⎥
⎥
M =⎢
⎣ 2 2 −1 −1 −4 −4 | −25⎦ →
−6 −6 −1 −1 −2 −2 | −33
⎤
⎡
3 3 −2 −2 −3 −3 | −13
⎥
⎢
⎥.
→⎢
1
1
−6
−6
|
−49
0
0
⎦
⎣
0 0 0 0 1 1 |
8
1,2,3
В качестве базисного минора выбираем, например, M1,3,5
= 0. Значит,
b, d, f — независимые переменные, через которые выражаются переменные a, c, e:
⎡
⎤
3−b b
⎢
⎥
⎥ , где b, d, f ∈ R.
X=⎢
−1
−
d
d
⎣
⎦
8−f f
3.11. Ответ:
a
b
1) X =
, где a, b ∈ R;
−2 − 3a 2 − 3b
2) X ∈ ∅,⎡т. е. решений нет; ⎤
5a 3(a − 1) −a − 4
⎥
1⎢
3) X = ⎢
5d 3d − 5
−d ⎥
⎣
⎦ , где a, d, g ∈ R;
5
5g 3(g + 1) 4 − g
4) X ∈ ∅.
3.12. Решение.
Обозначим первоначальные значения элементов массива a[] через
a[1], a[2], . . . , a[5]. После выполнения кода фрагмента программы
массив a[] будет содержать следующие элементы:
180
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
16a[1]+16a[5],
-8a[1]+16a[2]-8a[5],
4a[1]-8a[2]+16a[3]+4a[5],
-2a[1]+4a[2]-8a[3]+16a[4]-2a[5],
a[1]-2a[2]+4a[3]-8a[4]+17a[5].
Получаем систему линейных уравнений с пятью неизвестными. Ее
решение a[1] = −4, a[1] = 1, a[1] = 3, a[1] = 3, a[1] = 2. Значит,
исходный массив имеет вид [-4, 1, 3, 3, 2].
3.13. Ответ: [-14, -5, -2, 1, 1, 1, 5].
3.14. Решение.
import math
def gauss_jordan_elimination(A, B):
m = len(A)
n = len(A[0])
if len(B) != m:
raise ValueError
C = [[A[i][j] if j != n else B[i]
for j in range(n+1)] for i in range(m)]
for r in range(n):
max_row_pos = r
# Pivoting strategy
for i in range(r + 1, n):
if abs(C[i][r]) > abs(C[max_row_pos][r]):
max_row_pos = i
C[r], C[max_row_pos] = C[max_row_pos], C[r]
if math.isclose(C[r][r], 0):
continue
for i in range(n):
factor = C[i][r] / C[r][r]
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
181
for j in range(n + 1):
if i != r and j != r:
C[i][j] -= factor * C[r][j]
for i in range(n):
if i != r:
C[i][r] = 0.0
for j in range(n + 1):
if j != r:
C[r][j] /= C[r][r]
C[r][r] = 1.0
answer = [0] * n
for i in range(n):
if not math.isclose(C[i][i], 0):
answer[i] = C[i][n] / C[i][i]
elif not math.isclose(C[i][n], 0):
return None
return answer
Приведем пример вызова функции gauss_jordan_elimination():
size = 100
A = [[0 for j in range(size)]
for i in range(size)]
B = [0 for i in range(size)]
for i in range(size):
for j in range(size):
A[i][j] = 1 if j == i else 0
for i in range(size):
B[i] = float(i)
print(A)
182
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
print(B)
print(gauss_jordan_elimination(A, B))
Асимптотическая сложность метода Гаусса – Жордана совпадает со
сложностью метода Гаусса и равна O(n3 ), где n — число уравнений исходной системы уравнений [70].
3.15. Решение.
1) Обозначим матрицу системы через A и приведем ее к верхнему
треугольному виду.
⎡
⎤
⎡
⎤
⎡
⎤
1
−4
1
1
−4
1
1 −4 1
(2)−(1) ⎢
⎥
⎢
⎥
⎢
⎥
(3)−3(1)
⎢0 5 −2⎥ → (3)−2(2) ⎢0 5 −2⎥ .
⎥
A=⎢
→
1
1
−1
⎣
⎦
⎣
⎦
⎣
⎦
0 10 −4
0 0 0
3 −2 −1
Ранг матрицы равен двум, количество переменных три. Из этого следует,
что система будет иметь 3 − 2 = 1 свободную переменную.
Выпишем получившиеся уравнения:
x1 − 4x2 + x3 = 0,
5x2 − 2x3 = 0.
В качестве независимой переменной выберем x3 :
⎧
3
⎪
⎨ x1 = x3 ,
5
2
⎪
⎩ x 2 = x3 .
5
В итоге получаем фундаментальную систему решений: {[3, 2, 5]T }.
2) Запишем матрицу системы A и приведем ее к верхнему треугольному виду.
⎡
⎤
⎡
⎤
2
−1
3
1
2 −1 3 1
(2)−(1) ⎢
⎥
⎢
⎥
⎥ → (3)−2(1) ⎢0 −4 −4 −1⎥ →−1(2)
A=⎢
2
−5
−1
0
⎣
⎦
⎣
⎦
4 −7
1
3
0 −5 −5 1
⎤
⎡
⎤
2 −1 3 1
2 −1 3 1
⎢
⎥
⎢
⎥
⎥ → 4(3)+5(2) ⎢0 4 4 1⎥ .
→⎢
0
4
4
1
⎣
⎦
⎣
⎦
0 0 0 9
0 −5 −5 1
⎡
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
183
Ясно, что ранг матрицы rk A = 3, количество переменных равно 4. Следовательно, система будет иметь 4 − 3 = 1 свободную переменную. Выпишем получившиеся уравнения:
⎧
⎪
⎪
⎨ 2x1 − x2 + 3x3 + x4 = 0,
4x2 + 4x3 + x4 = 0,
⎪
⎪
⎩
9x4 = 0.
В качестве независимой переменной
⎧
⎪
⎪
⎨ x1 =
x2 =
⎪
⎪
⎩ x4 =
выберем x3 :
−2x3 ,
−x3 ,
0.
Фундаментальная система решений: {[−2, −1, 1, 0]T }.
3) Запишем матрицу системы A и приведем ее к верхнему треугольному виду.
⎡
⎡
⎤
⎤
1
2
4
−3
1 2 4 −3
(4)−(2)
⎢
⎢
⎥
⎥
(2)−3(1) ⎢
⎢3 5 6 −4 ⎥
0 −1 −6
5 ⎥
(3)−4(1)
⎢
⎢
⎥.
⎥
A=⎢
→
⎢
⎥
⎥
⎣0 −3 −18 15 ⎦
⎣4 5 −2 3 ⎦
0 3 18 −15
3 8 24 −19
Заметим, что вторая, третья и четвертая строки пропорциональны:
1 2 4 −3
A→
.
0 −1 −6 5
Ранг матрицы rk A = 2, количество переменных 4. Следовательно, система будет иметь 4−2 = 2 свободных переменных. Выпишем получившиеся
уравнения:
x1 + 2x2 + 4x3 − 3x4 = 0,
−x2 − 6x3 + 5x4 = 0.
В качестве независимых переменных выберем x3 и x4 :
x1 = 8x3 − 7x4 ,
x2 = −6x3 + 5x4 .
Фундаментальная система решений: {[8, −6, 1, 0]T , [−7, 5, 0, 1]T }.
184
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
4) Запишем матрицу системы A и приведем ее к верхнему треугольному виду.
⎡
⎡
⎡
⎤
⎤
⎤
1 1 −4
1
1
−4
3 5 2
(2)−4(1)
⎢
⎢
⎢
⎥
⎥
⎥
(3)−3(1) ⎢
⎢4 7 5 ⎥ (1)↔(3) ⎢4 7 5 ⎥
⎥
0
3
21
(4)−(3)
(4)−2(1)
⎢
⎢
⎥
⎥
⎥
A=⎢
⎢3 5 2 ⎥ →
⎢0 2 14 ⎥ →
⎢1 1 −4⎥ →
⎣
⎣
⎣
⎦
⎦
⎦
2 9 6
0 7 14
2 9 6
⎡
⎡
⎤
⎤
1 1 −4
1 1 −4
⎢
⎢
⎥
⎥
⎢0 3 21 ⎥
⎢0 3 21 ⎥
3(3)−2(2)
⎢
⎥
⎥
→⎢
⎢0 2 14 ⎥ →
⎢0 0 0 ⎥ .
⎣
⎣
⎦
⎦
0 5 0
0 5 0
Третья строка целиком состоит из нулевых элементов и может быть удалена из матрицы системы.
⎡
⎤
⎡
⎤
⎡
⎤
1 1 −4
1 1 −4
1 1 −4
⎢
⎥
⎢
⎥
⎢
⎥
⎢0 3 21 ⎥ →(2)↔(3) ⎢0 5 0 ⎥ → 5(3)−3(2) ⎢0 5 0 ⎥ .
⎣
⎦
⎣
⎦
⎣
⎦
0 5
0 3 21
0
0 0 105
Ранг матрицы rk A = 3, количество переменных 3. Следовательно, у
системы нет свободных переменных. Выпишем получившиеся уравнения:
⎧
⎪
⎪
⎨ x1 + x2 − 4x3 = 0,
⎪
⎪
⎩
Отсюда:
5x2 = 0,
105x3 = 0.
⎧
⎪
⎪
⎨ x1 = 0,
x2 = 0,
⎪
⎪
⎩ x3 = 0.
В итоге, система имеет только тривиальное решение: [0, 0, 0]T .
5) Запишем матрицу системы и приведем ее к верхнему треугольному
виду.
⎡
⎡
⎤
⎤
⎡
⎤
1 2 3 0
1
2
3
0
2 4 6 1
(2)−(1)
⎢
⎢
⎥
⎥
⎢
⎥
(3)−3(1) ⎢
⎢
⎥
⎢1 2 3 1 ⎥
1
2
3
1
0 0 0 1⎥
(1)−(2) ⎢
(4)−(1)
⎢
⎥
⎥
⎢
⎥
A=⎢
⎢3 6 9 −1⎥ →
⎢0 0 0 −1⎥ .
⎥→
3
6
9
−1
⎣
⎣
⎦
⎦
⎣
⎦
1 2 3 5
0 0 0 5
1 2 3 5
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
185
Вторая, третья и четвертая строки являются пропорциональными:
1 2 3 0
A→
.
0 0 0 1
Ранг матрицы rk A = 2, количество переменных равно четырем, следовательно, система будет иметь 4 − 2 = 2 свободные переменные. Выпишем
получившиеся уравнения:
x1 + 2x2 + 3x3 = 0,
x4 = 0.
Отсюда:
x1 = −2x2 − 3x3 ,
x4 = 0.
Фундаментальная система решений: {[−2, 1, 0, 0]T , [−3, 0, 1, 0]T }.
6) Запишем матрицу A и приведем ее к верхнему треугольному виду.
⎡
⎤
⎡
⎤
1
2
3
1 2 3
(2)−2(1) ⎢
⎥
⎢
⎥
⎥ → (3)−(1) ⎢0 −1 −2⎥ .
A=⎢
2
3
4
⎣
⎦
⎣
⎦
0 −1 −2
1 1 1
Вторая и третья строки пропорциональны:
1 2 3
A→
.
0 −1 −2
Ранг матрицы rk A = 2, количество переменных равно трем. Следовательно, система будет иметь 3 − 2 = 1 свободную переменную. Выпишем
получившиеся уравнения:
x + 2y + 3z = 0,
−y − 2z = 0.
Отсюда:
x = z,
y = −2z.
Фундаментальная система решений: {[1, −2, 1]T }.
186
ГЛАВА 3. СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
7) Запишем матрицу системы A и приведем ее к верхнему треугольному виду.
⎡
⎡
⎤
⎤
1
−2
3
−4
1 −2 3 −4
(2)−2(1)
⎢
⎢
⎥
⎥
(3)−6(1) ⎢
⎢2 −4 5 7 ⎥
⎥
0
0
−1
15
(4)−7(1) ⎢
⎢
⎥
⎥
⎢0 0 −1 15 ⎥ .
⎢6 −12 17 −9⎥ →
⎣
⎣
⎦
⎦
0 0 −2 45
7 −14 19 17
Вторая и третья
⎡
1
⎢
⎢0
⎣
0
строки пропорциональны:
⎡
⎤
⎤
1 −2 3 −4
−2 3 −4
⎢
⎥
⎥
(3)−2(2) ⎢
⎥
0 −1 15 ⎥
⎣0 0 −1 15 ⎦ .
⎦→
0 0 0 15
0 −2 45
Ранг матрицы rk A = 3, количество переменных равно четырем. Следовательно, система будет иметь 4 − 3 = 1 свободную переменную. Выпишем получившиеся уравнения:
⎧
⎪
⎪
⎨ x1 − 2x2 + 3x3 − 4x4 = 0,
−x3 + 15x4 = 0,
⎪
⎪
⎩
15x4 = 0.
Отсюда:
⎧
⎪
⎪
⎨ x1 = 2x2 ,
x3 = 0,
⎪
⎪
⎩ x4 = 0.
Фундаментальная система решений имеет вид {[2, 1, 0, 0]T }.
Глава 4
Комплексные числа и матрицы
Как уже отмечалось в первой главе, элементами матриц могут выступать комплексные числа. Более того, характеристики вещественных
матриц (такие как их собственные значения, см. далее главу 5 «Векторные пространства» на с. 240) в некоторых случаях оказываются комплексными. В связи с этим рассмотрим методы алгебры комплексных
чисел.
Комплексным числом z называется упорядоченная пара вещественных чисел (a, b), где a, b ∈ R. Первое число a называется вещественной частью комплексного числа z = (a, b) и обозначается символом Re z, второе число пары b называется мнимой частью z и обозначается Im z [24, 49].
Комплексное число вида (a, 0), у которого мнимая часть равна нулю,
отождествляют с вещественным числом a, т. е. (a, 0) ≡ a. Это позволяет
рассматривать множество всех вещественных чисел R как подмножество
множества комплексных чисел C.
Два комплексных числа z1 = (a1 , b1 ) и z2 = (a2 , b2 ) считают равными
тогда и только тогда, когда их вещественные и мнимые части попарно
равны: z1 = z2 ⇔ a1 = a2 , b1 = b2 .
4.1.
Арифметические операции
с комплексными числами
На множестве C определяются операции сложения и умножения комплексных чисел. Суммой комплексных чисел z1 = (a1 , b1 ) и z2 = (a2 , b2 )
называется комплексное число z, равное z1 +z2 = (a1 + a2 , b1 + b2 ). Произведением чисел z1 = (a1 , b1 ) и z2 = (a2 , b2 ) называется такое комплексное число z = (a, b), что a = a1 a2 − b1 b2 , b = a1 b2 + a2 b1 .
Пара (0, 1) имеет важнейшее значение в операциях с комплексными
188
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
числами, обозначается (0, 1) ≡ i и носит название мнимой единицы.
Основное свойство мнимой единицы заключается в том, что i2 = i · i =
= (0, 1) · (0, 1) = (−1, 0), или i2 = −1.
Комплексное число вида z = (0, b) называется чисто мнимым. Так
как (0, b) = (b, 0) · (0, 1), то чисто мнимое число z представимо в виде
произведения z = bi.
Любое комплексное число можно представить в виде
z = (a, b) = (a, 0) + (0, b) = (a, 0) + (b, 0) · (0, 1) = a + ib.
(4.1)
Такая запись называется алгебраической формой комплексного
числа. Это позволяет рассматривать i в качестве множителя, квадрат
которого равен −1, и производить операции с комплексными числами
так же, как они производятся с алгебраическими полиномами, полагая
в промежуточных выкладках i2 = −1.
Пример 4.1. Пусть z1 = 2 + 5i, z2 = −3 + 2i. Тогда результатом
сложения этих чисел будет комплексное число
z1 + z2 = (2 + 5i) + (−3 + 2i) = (2 − 3) + (5 + 2)i = −1 + 7i.
(4.2)
Произведение чисел z1 и z2 вычисляется перемножением выражений (2+
+ 5i) и (−3 + 2i) как полиномов с учетом равенства i2 = −1:
z1 z2 = (2 + 5i)(−3 + 2i) = 2(−3) + 2(2i) − 3(5i) + (5i)(2i) =
= −6 + 4i − 15i + 10i2 = −6 − 10 + (4 − 15)i = −16 − 11i.
(4.3)
Комплексное число z ∗ = (a, −b) = a − ib носит название сопряженного по отношению к комплексному числу z = (a, b) = a+ib. Существует
еще одно часто встречающееся обозначение сопряженного числа — z. Если коэффициенты полинома p(z) вещественны, то справедливо равенство
(p(z))∗ = p(z ∗ ).
Удобно изображать число z = a + ib точкой (x, y) плоскости с декартовыми координатами x = a и y = b. Каждому комплексному числу
z сопоставим точку плоскости с координатами (x, y), а также радиусвектор, соединяющий начало координат с этой точкой. Такая плоскость
z и называется комплексной (рис. 4.1). Отметим,
обозначается через ○
что геометрическую интерпретацию комплексных чисел иногда называют диаграммой Арга́на1 .
1
Арган (Jean-Robert Argand) (1768–1822) — французский математик.
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
y
189
z
○
z = a + ib
b = Im z
ρ
ϕ
O
a = Re z
x
Рис. 4.1. Изображение числа z на комплексной плоскости
Во многих приложениях широко используется тригонометрическая
форма комплексного числа z. Введем полярную систему координат так,
чтобы полюс находился в начале декартовой системы (x, y). Ось полярной системы направим вдоль положительного направления оси Ox.
В таком случае декартовы и полярные координаты произвольной точки, отличной от начала координат, связаны формулами
x = ρ cos ϕ, y = ρ sin ϕ,
⎧
y
⎪
⎪
если x > 0;
arctg ,
⎪
⎪
x
⎪
⎪
y
⎪
⎪
⎨arctg + π, если x < 0, y 0;
/
x
ϕ=
ρ = x2 + y 2 ,
y
⎪
⎪arctg − π, если x < 0, y < 0;
⎪
⎪
x
⎪
⎪
⎪
π
⎪
⎩ sgn y,
если x = 0.
2
В итоге получаем тригонометрическую форму числа z:
z = (x, y) = x + iy = ρ(cos ϕ + i sin ϕ).
(4.4)
Величину ρ называют модулем, а ϕ — аргументом комплексного
числа z и обозначают ρ = |z|, ϕ = arg z. Следует обратить внимание на
то, что аргумент ϕ определен неоднозначно: вместо значения ϕ можно
взять значение ϕ + 2πk, где k ∈ Z. Если arg z выбран таким образом,
что −π < arg z π, то такое значение называется главным значением
аргумента.
190
a)
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
y
z
○
z1 + z2
z2
b)
y
z2
z1
ϕ1 + ϕ 2
O
z
○
z1 z2
x
O
z1
ϕ2
ϕ1
x
Рис. 4.2. Сумма (панель a) и произведение (панель b) комплексных чисел
z 1 и z2
Для чисел z1 = ρ1 (cos ϕ1 +i sin ϕ1 ) и z2 = ρ2 (cos ϕ2 +i sin ϕ2 ), заданных
в тригонометрической форме, выполняются соотношения
z1 z2 = ρ1 ρ2 (cos(ϕ1 + ϕ2 ) + i sin(ϕ1 + ϕ2 )),
z1
ρ1
= (cos(ϕ1 − ϕ2 ) + i sin(ϕ1 − ϕ2 )), ρ2 = 0.
z2
ρ2
Геометрическая иллюстрация суммы и произведения комплексных
чисел представлена на рис. 4.2. Для любых z1 , z2 ∈ C радиус-вектор
суммы z1 + z2 равен сумме радиус-векторов слагаемых z1 и z2 . Радиусвектор произведения z1 z2 получается поворотом радиус-вектора числа z1
на угол arg z2 против часовой стрелки и растяжением в |z2 | раз.
Формула Эйлера2 связывает показательную функцию мнимого аргумента с тригонометрическими функциями мнимой части аргумента [24]:
eiϕ = cos ϕ + i sin ϕ.
(4.5)
Поэтому можно ввести еще одну форму записи комплексного числа, а
именно показательную: z = ρeiϕ . Показательную форму записи удобно
использовать при операциях умножения, деления, возведения в степень
и извлечения корня. Например, n-ю степень числа z можно представить
в виде
(4.6)
z n = (ρeiϕ )n = ρn einϕ = ρn (cos nϕ + i sin nϕ)
для всех целых значений n.
Важное следствие из полученной формулы
(cos ϕ + i sin ϕ)n = cos nϕ + i sin nϕ
2
Эйлер (Leonhard Euler) (1707–1783) — выдающийся швейцарский математик.
(4.7)
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
191
связывают с именем Муавра3 .
Корень n-й степени из z = ρ(cos ϕ + i sin ϕ) можно вычислить как
√
n
z ≡ z 1/n = [ρ(cos(ϕ + 2πk) + i sin(ϕ + 2πk))]1/n ,
или, после применения формулы Эйлера,
&
& ϕ + 2πk '
& ϕ + 2πk ''
√
n
z = ρ1/n cos
+i sin
,
n
n
k ∈ Z,
(4.8)
k = 0, 1, . . . , n−1. (4.9)
Здесь получается n возможных значений корня n-й степени при k =
= 0, 1,√
. . . , n − 1. Остальные допустимые k не приводят к новым значениям n z. Например, при k = n аргумент равен arg z = ϕ/n + 2π и
отличается от случая k = 0 на величину 2π, что соответствует равному
ему комплексному числу.
Пример 4.2. Обозначим корни уравнения z n = 1, где n — натуральное
число, через ωk , k = 0, . . . , n − 1. Докажем, что на комплексной плоскости точки, соответствующие величинам ωk , расположены в вершинах
правильного n-угольника, вписанного в единичную окружность, центр
которой расположен в начале координат [49].
Доказательство.
Согласно введенному определению,
ωk = (e2πi )k/n = e2πik/n ,
k = 0, 1, . . . , n − 1.
√
В частности, для n = 4 имеем следующие значения 4 1:
ωk = (e2πi )k/4 = eπik/2 ,
k ∈ {0, 1, 2, 3},
(4.10)
(4.11)
или, после вычисления комплексных экспонент:
ωk = 1, i, −1, −i.
(4.12)
Модуль комплексного числа ωk = e2πik/n равен единице для всех значений переменной k, а аргумент равен arg ωk = 2πk/n, k = 0, 1, . . . , n−1.
В силу этого можно сделать вывод, что корни n-й степени из единицы
расположены на единичной окружности C, причем первый корень ω0 ,
соответствующий k = 0, лежит на вещественной оси, и ωk делят окружность на n дуг одинаковой длины (см. пример для частного случая n = 9
на рис. 4.3).
3
Муавр (Abraham de Moivre) (1667–1754) — английский математик французского происхождения.
192
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
y
z
○
C
O
1
x
Рис. 4.3. Расположение корней n-й степени из единицы на единичной
окружности для n = 9
4.2.
Основная теорема алгебры
Теорема 4.1 (основная теорема алгебры) гласит, что любой полином ненулевой степени с комплексными коэффициентами имеет комплексный корень [15]. Из этого следует, что произвольный полином с вещественными (или комплексными) коэффициентами всегда имеет некоторый корень z ∈ C.
Каждый полином степени n
p(z) = cn z n + cn−1 z n−1 + . . . + c0 , ci ∈ C для i = 0, 1, . . . , n, cn = 0,
(4.13)
можно единственным образом (с точностью до порядка сомножителей)
разложить в произведение
p(z) = cn (z − z1 )m1 (z − z2 )m2 . . . (z − zk )mk ,
(4.14)
где zi — корень полинома p(z) кратности mi , 1 i k.
Для полиномов со степенью меньшей, чем пятая, всегда можно получить корни, выразив их через арифметические операции и арифметические корни произвольной степени, или радикалы. Метод для вычисления корней кубического полинома был предложен Кардано4 (см.
далее раздел 4.3.), полинома четвертой степени — Феррари5 . Однако
для отыскания корней полиномов более высоких степеней общих методов не существует, о чем свидетельствует следующая теорема.
4
5
Кардано (Hieronymus Cardanus) (1501–1576) — итальянский математик и философ.
Феррари (Lodovico Ferrari) (1522–1565) — итальянский математик.
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
193
Теорема 4.2 (Теорема Абеля6 – Руффини7 ). Произвольное уравнение степени n при n 5 неразрешимо в радикалах.
4.3.
Формула Кардано
Для определения корней кубического уравнения
az 3 + bz 2 + cz + d = 0,
где a, b, c, d ∈ C,
(4.15)
поступают следующим образом. При помощи замены переменной z =
b
уравнение приводят к канонической форме
=y−
3a
y 3 + py + q = 0,
p, q ∈ C.
(4.16)
По формуле Кардано корни кубического уравнения y1 , y2 , y3 в
канонической форме равны [20]
y1 =
α + β,
√ α−β
α+β
+i 3·
,
y2 = −
2
2
√ α−β
α+β
−i 3·
,
y3 = −
2
2
где
0
α=
3
0
(4.17)
(4.18)
(4.19)
q /
− + Q,
2
q /
− − Q,
2
& p '3 & q '2
Q=
+
.
3
2
β=
3
Применяя эти соотношения, нужно для каждого из трех значений кубического корня α брать то значение корня β, для которого выполняется
равенство αβ = −p/3.
Пример 4.3. Определим корни уравнения z 3 − 5z 2 + 9z − 5 = 0, пользуясь формулой Кардано.
Решение.
6
7
Абель (Niels Henrik Abel) (1802–1829) — норвежский математик.
Руффини (Paolo Ruffini) (1765–1822) — итальянский математик.
194
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
5
Сделаем замену переменной z = y + . Получим кубическое уравне3
ние в канонической форме
2
20
= 0,
y3 + y +
3
27
(4.20)
20
2
здесь p = , q = . Далее используем формулу Кардано (4.17)–(4.19):
3
27
Q=
& p '3
α, β =
3
1
3
+
& q '2
2
10
− ±
27
=
0
4
,
27
2
√
4
13
=
−10 ± 6 3.
27 3
√
p
1/
3
6 3 − 10, тогда, чтобы выполнялось условие αβ = − ,
3 /
3
13 √
выбираем β = −
6 3 + 10. Корни уравнения будут иметь вид
3
2
2
√
1 3 √
3
y1 =
6 3 − 10 − 6 3 + 10 ;
3
2
√ 2
2
2
√
√
1 3 √
i 3 3 √
3
3
6 3 − 10− 6 3 + 10 +
6 3 − 10+ 6 3 + 10 ;
y2 = −
6
6
2
√ 2
2
2
√
√
1 3 √
i 3 3 √
3
3
6 3 − 10− 6 3 + 10 −
6 3 − 10+ 6 3 + 10 .
y3 = −
6
6
Пусть α =
Полученные выражения можно упростить, если
заметить, что выпол/
√
√
√
√
3
3
няется равенство 6 3 ± 10 = ( 3 ± 1) . Тогда 6 3 ± 10 = 3 ± 1, и
'
√
2
1 &√
3 − 1 − ( 3 + 1) = − ;
3
3
' i√3 &√
'
√
√
1 &√
3 − 1 − ( 3 + 1) +
3−1+ 3+1 =
y2 = −
6
6
√
&
'
'
√
√
√
1
i 3 &√
3 − 1 − ( 3 + 1) −
3−1+ 3+1 =
y3 = −
6
6
y1 =
1
+ i;
3
1
− i.
3
5
Возвращаясь к исходной переменной z = y + , получаем z1 = 1,
3
z2 = 2 + i, z3 = 2 − i.
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
4.4.
195
Матрицы с комплексными
коэффициентами
Среди матриц с комплексными коэффициентами особую роль в алгебре и ее приложениях играют классы эрмитовых и унитарных матриц.
4.4.1.
Эрмитовы матрицы
Рассмотрим матрицу Z, содержащую комплексные элементы Z =
= (zij ), где i = 1, 2, . . . , m, j = 1, 2, . . . , n. Эрмитово-сопряженной
матрицей по отношению к Z называется матрица Z H , элементы которой
равны
∗
.
(4.21)
zijH = zji
Для того чтобы получить эрмитово-сопряженную матрицу, к исходной
матрице применяются операции транспонирования и комплексного сопряжения. Указанные операции независимы, их можно выполнять в любом порядке.
Пример 4.4. Эрмитово-сопряженной матрицей по отношению к Z =
1 + i 2 + 3i
=
является матрица
−1 5 − 4i
⎛
+∗ T ⎞∗ *
1
+
i
−1
1
−
i
−1
1
+
i
2
+
3i
⎠ =
=
.
ZH = ⎝
2 − 3i 5 + 4i
2 + 3i 5 − 4i
−1 5 − 4i
(4.22)
Примечание. Часто для обозначения эрмитово-сопряженной матрицы
используют обозначения Z † или Z + .
Перечислим основные свойства операции эрмитового сопряжения:
1) I H = I;
2) (Z1 + Z2 )H = Z1H + Z2H ;
3) (λZ)H = λ∗ Z H ∀λ ∈ C;
4) (Z H )H = Z;
H −1
5) если существует A−1 , то A−1 = AH ;
6) det AH = det A∗ = (det A)∗ .
Теорема 4.3. Если для комплексных матриц Z1 и Z2 определено
произведение Z1 Z2 , то
(Z1 Z2 )H = Z2H Z1H .
(4.23)
196
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
Доказательство.
Справедливость теоремы следует из свойства транспонирования произведения матриц:
(Z1 Z2 )T = Z2T Z1T .
(4.24)
С помощью уравнения (4.24) получим цепочку равенств
(Z1 Z2 )H = ((Z1 Z2 )T )∗ = (Z2T Z1T )∗ = (Z2T )∗ (Z1T )∗ = Z2H Z1H ,
(4.25)
что и доказывает тождество (4.23).
Среди комплексных матриц очень широкое применение находят эрмитовы матрицы. Эрмитовой матрицей называется квадратная матрица, у которой Z H = Z. Соответствующее условие на элементы такой
∗
). Другими словами, эрмитова матрица совпадаматрицы: ∀i, j (zij = zji
ет со своей эрмитово-сопряженной.
1
−3 − i
Пример 4.5. Матрица Z =
является, как легко ви−3 + i
1
деть, эрмитовой. Проверим это.
ZH
⎛
=⎝
T ⎞∗ *
+∗ 1
−3 − i
1
−3 + i
1
−3 − i
⎠ =
=
.
−3 + i
1
−3 − i
1
−3 + i
1
(4.26)
Напомним, что применение операции комплексного сопряжения к вещественному числу оставляет это число без изменений.
Примечание. Эрмитовы матрицы называются также самосопряженными матрицами. Теория самосопряженных матриц находит широкое
применение в современной физике [16].
4.4.2.
Унитарные матрицы
Квадратная матрица U с комплексными элементами называется унитарной, если выполняется условие U H U = I. Условие унитарности можно записать в других эквивалентных формах следующим образом:
UUH = I
или
U H = U −1 .
(4.27)
1 1
1
Пример 4.6. Докажем, что матрица Z = √
является уни2 −i i
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
197
тарной. Для этого вычислим произведение Z H Z:
*
+H
1
1
1
1
1
i
1
1
1
0
1
1
1
1
√
√
ZHZ = √
=√
=
.
2
2 −i i
2 1 −i
2 −i i
−i i
0 1
(4.28)
Следовательно, Z — унитарная матрица.
Теорема 4.4. Определитель унитарной матрицы есть комплексное
число, модуль которого равен единице.
Доказательство см. в упр. 4.51.
Между унитарными и эрмитовыми матрицами существует тесная
связь: каждая унитарная матрица A представляется в виде A = exp(iB),
где B — эрмитова матрица [5].
4.5.
Основы квантовых вычислений
В квантовых компьютерах для реализации вычислений используются
процессы квантовой природы, проявляющиеся в экспериментах с объектами микромира — элементарными частицами, атомами, молекулами,
молекулярными кластерами и др. Описание таких процессов основано
на применении комплексных чисел и комплексных матриц.
Как хорошо известно, базовым понятием классической теории информации является бит [45]. Классический бит принимает значения 0 или 1
(и только эти значения).
Кубит (quantum bit) является наименьшим элементом, выполняющим функцию хранения информации в квантовом компьютере [9, 36, 69].
Кубитом называется квантовая система |ψ , допускающая два состояния: |0 и |1 [69]. В соответствии с так называемой бра-кет нотацией
Дирака8 (от английского слова bra(c)ket), символы |0 или |1 читаютcя
как «кет 0» и «кет 1» соответственно. Скобки |. . . указывают, что ψ
является некоторым состоянием квантовой системы.
Фундаментальное различие между классическим битом и кубитом
заключается в том, что кубит может находиться в состоянии, отличном
от |0 или |1 . Произвольное состояние кубита определяется линейной
комбинацией базовых состояний:
|ψ = u |0 + v |1 ,
(4.29)
где комплексные коэффициенты u и v удовлетворяют следующему условию:
(4.30)
|u|2 + |v|2 = 1.
8
Дирак (Paul Adrien Maurice Dirac) (1902–1984) — английский физик.
198
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
Математическое описание базовых состояний сводится к их представлению в матричном виде:
1
0
|0 =
, |1 =
.
(4.31)
0
1
На основании представления (4.31) записывается произвольное состояние кубита
u
|ψ =
.
(4.32)
v
Система из двух кубитов задается линейной комбинацией базовых
состояний
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
1
0
0
0
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢0⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎥ , |01 = ⎢1⎥ , |10 = ⎢0⎥ , |11 = ⎢0⎥ .
|00 = ⎢
(4.33)
⎢0⎥
⎢0⎥
⎢1⎥
⎢0⎥
⎣ ⎦
⎣ ⎦
⎣ ⎦
⎣ ⎦
0
0
0
1
Аналогичным образом вводятся состояния
|00 . . . 00 ,
|00 . . . 01 ,
...,
|11 . . . 11
(4.34)
нескольких взаимодействующих между собой кубитов. Такие квантовые состояния называются состояниями вычислительного базиса
(computational basis states), или сокращенно — базисными состояниями.
Для изменения состояния квантовой системы используются квантовые операции, которые называются гейтами, или вентилями (quantum
gate). Таким образом, гейты осуществляют логические операции над кубитами. Заметим, что об изменении состояния |ψ во времени говорят
также как об эволюции квантовой системы.
Важным шагом работы квантовых алгоритмов является процедура
измерения состояния. При измерении состояния кубита он случайным образом переходит в одно из своих состояний: |0 или |1 . Следовательно, комплексные коэффициенты u и v из определения кубита (4.29)
связаны с вероятностью получить значение 0 или 1 при измерении его
состояния. Согласно постулатам квантовой теории, вероятности переходов в состояния |0 и |1 равны |u|2 и |v|2 соответственно. В связи с этим
равенство (4.30) отражает закон сохранения вероятности. После измерения кубит переходит в базовое состояние, отвечающее классическому
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
199
результату измерения. Вероятности получения результата 0 или 1, вообще говоря, различны для различных состояний квантовой системы.
Другими словами, квантовое вычисление есть последовательность операций простого вида над совокупностью взаимодействующих между собой кубитов. На заключительном этапе процедуры квантового вычисления измеряется состояние квантовой системы и делается вывод о результате вычисления. Измерение дает возможность получить на макроскопическом уровне информацию о квантовом состоянии. Особенностью
квантовых измерений является их необратимость, что коренным образом
отличает квантовые вычисления от классических.
Квантовая система, образованная N двухуровневыми квантовыми
элементами, имеет Σ(N ) = 2N независимых состояний. Ключевым моментом функционирования такой системы является взаимодействие отдельных кубитов друг с другом. Количество состояний Σ(N ) растет экспоненциально с увеличением размера квантовой системы, что позволяет
решать практические задачи с очень высокой асимптотической сложностью (см. раздел «Асимптотическая сложность» на с. 30). Например,
известен эффективный квантовый алгоритм разложения числа на простые множители, что имеет важное значение в криптографии. В итоге,
для многих задач квантовые алгоритмы обеспечивают экспоненциальное
или полиномиальное ускорение по сравнению с классическими методами
решения.
К сожалению, полнофункциональный квантовый компьютер еще не
создан, хотя многие его элементы уже построены и изучаются в ведущих
лабораториях мира [78]. Основным препятствием на пути развития квантовых вычислений является нестабильность системы из многих кубитов.
Чем больше кубитов будут объединены в связанную систему, тем больше
усилий требуется для обеспечения малости числа ошибок в измерениях.
Тем не менее, история развития квантовых компьютеров демонстрирует огромный потенциал, заложенный в объединении квантовой теории и
теории алгоритмов.
Прежде чем перейти к описанию основных квантовых операций над
кубитами, введем понятия матриц Паули9 и матриц Дирака.
4.5.1.
Матрицы Паули и матрицы Дирака
Матрицы σ1 , σ2 и σ3
0 1
σ1 =
,
1 0
9
σ2 =
0 −i
i
0
,
σ3 =
1
0
0 −1
Паули (Wolfgang Ernst Pauli) (1900–1958) — швейцарский и американский физик.
(4.35)
200
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
носят название матриц Паули. Они находят широкое применение в
квантовой теории для описания частиц с полуцелым спином, например,
электрона. (Спин — это квантовое свойство элементарной частицы, собственный момент количества движения [16]. Так, полуцелым спином обладают электроны, протоны, нейтрино; спин фотонов, гравитонов является целым.)
Для матриц Паули справедливы следующие свойства.
1) Матрицы Паули эрмитовы и унитарны:
∀k ∈ {1, 2, 3} σk = σkH = σk−1 .
(4.36)
2) ∀k ∈ {1, 2, 3} квадрат матрицы Паули равен единичной матрице:
1
0
σi2 =
.
(4.37)
0 1
3) ∀i, j ∈ {1, 2, 3} выполняются равенства
1 0
.
σi σj + σj σi = 2δij
0 1
(4.38)
Иногда в линейной алгебре и ее приложениях приходится пользоваться матрицами, разбитыми на прямоугольные части или блоки [5, 18]. Рассмотрим прямоугольную матрицу A = (aij ), где 1 i m, 1 j n.
Пусть m = m1 + m2 , n = n1 + n2 .
Проведем горизонтальную и вертикальную линии и рассечем матрицу A на четыре прямоугольных блока:
⎡
n1
n2
"# !"# !
⎢ B11
⎢
A= ⎢
⎢
⎢
⎣ B21
⎤3
B12 ⎥
⎥ m1
⎥3
⎥
⎥
B22 ⎦ m2
(4.39)
Таким образом, матрица A представлена в виде блочной матрицы,
состоящей из блоков B11 , B12 , B21 , B22 размера m1 × n1 , m1 × n2 , m2 × n1 ,
m2 × n2 соответственно.
В качестве примера блочного задания матриц приведем определение
матриц Дирака. Четыре матрицы Дирака α1 , α2 , α3 , β входят в уравнение, носящее его имя [2], для релятивистской частицы с полуцелым
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
201
спином и выражаются через матрицы Паули σk , k = 1, 2, 3 следующим
образом:
O σk
I O
, β=
αk =
,
(4.40)
σk O
O −I
где O — нулевая матрица размера 2 × 2, I — единичная матрица того же размера. (Релятивистскими называются частицы, которые имеют
скорость, близкую к скорости света.)
Каждая из матриц Дирака обладает свойством эрмитовости и свойством унитарности. Кроме того, для всех l, m ∈ {1, 2, 3} справедливы
равенства:
αl αm + αm αl = 2δlm I,
αl β + βαl = O.
(4.41)
(4.42)
Заметим, что в формулах (4.41) и (4.42) размер матриц I и O равен 4×4.
4.5.2.
Основные операции над кубитами
Рассмотрим основные операции над кубитами.
Воздействие квантового гейта на кубит |ψ осуществляется посредством применения квантовомеханического оператора, например,
U |ψ [26, 78]. Операторы могут быть представлены в виде унитарных
матриц. В частности, эволюция одного кубита описывается унитарной
матрицей размера 2 × 2.
Последовательное применение ряда операторов U1 , U2 , . . . , Un к одному кубиту эквивалентно воздействию оператора W , матрица которого
является произведением матриц U1 U2 . . . Un [69]:
Un (Un−1 (. . . (U2 (U1 |ψ )) . . .)) = (U1 U2 . . . Un ) |ψ = W |ψ .
(4.43)
Такой оператор W называется композицией операторов U1 , U2 , . . . , Un .
Вследствие некоммутативности операции умножения матриц в общем
случае имеет значение порядок применения квантовых гейтов.
Пример 4.7. Покажем, что применение оператора σ3 (см. определение (4.35)) к кубиту в состоянии |ψ = u |0 + v |1 переводит его в состояние |ψ = u |0 − v |1 .
Доказательство.
Запишем кубит |ψ в матричном представлении:
u
|ψ =
.
(4.44)
v
202
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
Определим действие σ3 на это квантовое состояние:
u
1
0
u
u
1
0
|ψ = σ3
=
=
=u
−v
= u |0 − v |1 .
v
0 −1 v
−v
0
1
(4.45)
Широко применяется графическое представление квантовых операций в виде схем или диаграмм (quantum circuit).
Некоторый квантовомеханический оператор U , преобразующий единичный кубит (one-qubit gate), изображается следующим образом:
|ψout
|ψin
U
Последовательность выполнения шагов квантового алгоритма соответствует направлению на схеме слева направо.
В табл. 4.1 перечислены часто используемые гейты, преобразующие
один кубит, и матричные представления этих гейтов.
Покажем способ вычисления матрицы квантовой операции на основе
ее действия на базовые векторы.
Гейт Адамара10 преобразует состояние системы по правилу:
1
|0 → √ (|0 + |1 ),
2
1
|1 → √ (|0 − |1 ).
2
(4.46)
(4.47)
Следовательно, произвольное состояние |ψ будет изменяться в этом
случае следующим образом:
|ψ =
u
v
=u
1
0
+v
0
1
→
u
1
1 1 1
1
. (4.48)
→ u √ (|0 + |1 ) + v √ (|0 − |1 ) = √
2
2
2 1 −1 v
1 1 1
.
Таким образом, элементу Адамара отвечает матрица √
2 1 −1
Разумеется, для выполнения сложных алгоритмов кубиты должны
взаимодействовать между собой и обмениваться информацией. В связи с этим особое значение имеют логические операции, затрагивающие
10
Адамар (Jacques Salomon Hadamard) (1865–1963) — французский математик.
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
203
два и более кубитов. В табл. 4.2 перечислены наиболее важные гейты,
преобразующие состояние из двух кубитов.
Пример 4.8. Определим, как преобразуется кубит |ψ под действием
двукратного применения элемента Адамара:
|ψ |ψ
H
H
Решение.
Как показано выше, в матричном представлении элемент Адамара
описывается матрицей
1 1 1
MH = √
.
(4.49)
2 1 −1
Вычислим матрицу, соответствующую двукратному применению элемента Адамара как матричное произведение (см. формулу (4.43)):
1 0
1 1 1
1 2 0
1 1 1
·√
=
=
MH MH = √
.
(4.50)
2 0 2
2 1 −1
2 1 −1
0 1
Получена единичная матрица, следовательно, двукратное применение элемента Адамара возвращает кубит в его исходное состояние. Пример 4.9. Найдем матричное представление следующей квантовой
схемы:
•
•
Решение. Квантовая схема состоит из двух элементов «управляемый
NOT», или, как его еще называют, «CNOT» (Controlled NOT).
Матрица элемента CNOT имеет вид (см. табл. 4.2):
⎡
⎤
1 0 0 0
⎢
⎥
⎢0 1 0 0 ⎥
⎢
⎥
(4.51)
⎢0 0 0 1 ⎥
⎣
⎦
0 0 1 0
С учетом матричного представления CNOT вычислим, каким образом произвольное состояние |ψ1 ψ2 = (u1 |0 + v1 |1 )(u2 |0 + v2 |1 ) изменится после действия первого CNOT:
⎡ ⎤
⎡
⎤⎡ ⎤ ⎡ ⎤
u1
1 0 0 0
u1
u1
⎢
⎢ ⎥
⎥⎢ ⎥ ⎢ ⎥
⎢ 0 1 0 0 ⎥ ⎢ v1 ⎥ ⎢ v1 ⎥
⎢ v1 ⎥
⎥
⎢
⎥⎢ ⎥ ⎢ ⎥
(4.52)
|ψ1 ψ2 = ⎢
⎢ u ⎥ → ⎢ 0 0 0 1 ⎥ ⎢u ⎥ = ⎢ v ⎥ .
⎣
⎣ 2⎦
⎦ ⎣ 2⎦ ⎣ 2 ⎦
v2
v2
u2
0 0 1 0
204
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
Это эквивалентно тому, что состояния
преобразуются согласно правилу:
⎧
|00 → |00
⎪
⎪
⎪
⎨|01 → |01
⎪|10 → |11
⎪
⎪
⎩
|11 → |10
вычислительного базиса (4.33)
,
,
,
.
(4.53)
Обратим внимание, что следующий элемент CNOT принимает входные состояния в порядке, обратном по отношению к первому элементу.
Правило преобразования базисных состояний в этом случае имеет вид:
⎧
|00 → |00 ,
⎪
⎪
⎪
⎨|01 → |11 ,
(4.54)
⎪
|10 → |10 ,
⎪
⎪
⎩
|11 → |01 .
Следовательно, очередной этап эволюции квантовой системы описывается матрицей
⎡
⎤
1 0 0 0
⎢
⎥
⎢0 0 0 1⎥
⎢
⎥
(4.55)
⎢0 0 1 0⎥ .
⎣
⎦
0 1 0 0
Выполняем матричные вычисления:
⎡
⎤⎡ ⎤ ⎡ ⎤
⎡ ⎤
1 0 0 0
u1
u1
u1
⎢
⎥⎢ ⎥ ⎢ ⎥
⎢ ⎥
⎢
⎥⎢ ⎥ ⎢ ⎥
⎢ v1 ⎥
⎢ ⎥ → ⎢ 0 0 0 1 ⎥ ⎢ v 1 ⎥ = ⎢ u2 ⎥ .
⎢0 0 1 0⎥ ⎢ v ⎥ ⎢ v ⎥
⎢v ⎥
⎣
⎦ ⎣ 2⎦ ⎣ 2⎦
⎣ 2⎦
u2
u2
v1
0 1 0 0
(4.56)
В результате, исходное состояние |ψ1 ψ2 = [u1 , v1 , u2 , v2 ]T перейдет в
[u1 , u2 , v2 , v1 ]T . Матричное представление анализируемой схемы можно
записать в виде:
⎡
⎤⎡
⎤ ⎡
⎤
1 0 0 0
1 0 0 0
1 0 0 0
⎢
⎥⎢
⎥ ⎢
⎥
⎢0 1 0 0⎥ ⎢0 0 0 1⎥ ⎢0 0 0 1⎥
⎢
⎥⎢
⎥=⎢
⎥
(4.57)
⎢0 0 0 1⎥ ⎢0 0 1 0⎥ ⎢0 1 0 0⎥ .
⎣
⎦⎣
⎦ ⎣
⎦
0 0 1 0
0 1 0 0
0 0 1 0
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
205
Т а б л и ц а 4.1
Операции над одним кубитом
Название
Обозначение
Тождественное
преобразование
I
Элемент Паули X
X
Элемент Паули Y
Y
Элемент Паули Z
Z
Элемент Адамара
H
Фазовый элемент
S
Элемент π/8
T
Измерение
Матрица
1 0
I=
0 1
0 1
σ1 =
1 0
0 −i
σ2 =
i 0
1 0
σ3 =
0 −1
1 1 1
√
2 1 −1
1 0
1
0 i
0
0 eiπ/4
Проекция на |0 и |1
Контрольные вопросы к главе «Комплексные
числа и матрицы»
1. Что такое комплексное число?
2. Перечислите арифметические операции над комплексными числами.
3. Как найти число, сопряженное по отношению к данному комплексному числу?
4. Каким образом можно геометрически представить комплексное число?
5. Расскажите, в чем заключаются отличия между следующими фор-
206
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
Т а б л и ц а 4.2
Операции над двумя кубитами
Название
Обозначение
Обмен
×
×
Управляемый NOT
•
Управляемый
фазовый элемент
•
S
⎡
Матрица
1 0 0 0
⎢
⎢0
⎢
⎢0
⎣
0
⎡
1
⎢
⎢0
⎢
⎢0
⎣
0
⎡
1
⎢
⎢0
⎢
⎢0
⎣
0
⎤
⎥
0 1 0⎥
⎥
1 0 0⎥
⎦
0 0 1
⎤
0 0 0
⎥
1 0 0⎥
⎥
0 0 1⎥
⎦
0 1 0
⎤
0 0 0
⎥
1 0 0⎥
⎥
0 1 0⎥
⎦
0 0 i
мами комплексных чисел: алгебраической, тригонометрической, показательной.
6. Запишите формулу Эйлера.
7. Как найти корень n-й степени из комплексного числа? Сколько
значений он принимает?
8. Сформулируйте основную теорему алгебры.
9. Для чего применяют формулу Кардано?
10. Какие матрицы называются эрмитовыми, унитарными?
11. Дайте определение понятиям «бит», «кубит».
12. Какие состояния относят к состояниям вычислительного базиса?
13. Что такое гейт?
14. Расскажите, как выполняется измерение квантового состояния.
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
207
15. Запишите матрицы Паули и матрицы Дирака.
16. Перечислите основные операции над одним кубитом.
17. Какие квантовые операции применяют к системе из двух кубитов?
Задачи для самостоятельного решения
4.1. Выполнив арифметические действия, представьте заданное комплексное число z в алгебраической форме z = Re z + i Im z:
1) (3 + i)(2 + 5i);
2) (3 − i)(3 + i);
3) (1 − i)4 + (1 + i)4 ;
4) 2 − i3 .
4.2. Выполнив арифметические действия, представьте заданное комплексное число z в алгебраической форме z = Re z + i Im z:
1) (2 − i)(−1 + i);
2) (6 + 5i)(4 − i);
3) (1 + 3i)2 + (2 − i)2 ;
4) i5 − i3 .
4.3. Даны комплексные числа z1 = 5 + i, z2 = 4 − i, z3 = −1 + 3i.
Найдите z1 z3 − z22 .
4.4. Даны комплексные числа z1 = 1 − 2i, z2 = −1 + i, z3 = −i. Найдите
z1 z2 (z33 − z13 ).
4.5. Выполните действия:
1) (1 + 4i)3 + (1 − 4i)3 ;
2) (6 − i)4 + (6 + i)4 .
4.6. Выполнив деление, представьте комплексное число z =
a, b, c, d ∈ R, c = 0, d = 0, в алгебраической форме.
4.7. Упростите выражения:
1)
3+i
;
3−i
a + ib
, где
c + id
208
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
1 + 3i
;
1 − 3i
2 + i2
3)
;
3 + i3
i
i
4)
+
.
1+i 1−i
2)
4.8. Даны комплексные числа z1 = 2 + i, z2 = z1∗ , z3 = z1 + z2 . Найдите
(z1 − z3 )(z2 − z3 )/z2 .
4.9. Даны комплексные числа z1 = 7+2i, z2 = −z1 , z3 = 2−z1∗ . Найдите
(z1 z2 + z2 z3 + z1 z3 )/z1 .
4.10. Найдите число, сопряженное с числом z, если:
1 − 3i
;
1 + 3i
1
2) z = 2i +
.
2+i
1) z =
4.11. Найдите z, если z − 3z ∗ = 18 + 4i.
4.12. Найдите z, если 3z ∗ − 7z = 10 − 10i.
4.13. Докажите, что для произвольных z1 , z2 ∈ C выполняются равенства:
1) (z1 + z2 )∗ = z1∗ + z2∗ ;
2) (z1 z2 )∗ = z1∗ z2∗ .
4.14. Докажите, что если |z| = 1, то z −1 = z ∗ .
∗ 4.15. Докажите, что для любых z1 , z2 ∈ C выполняются неравенства
треугольника:
abs |z1 | − |z2 | |z1 + z2 | |z1 | + |z2 |.
∗ 4.16. Вычислите суммы:
1)
10
ik ;
k=1
2)
49
k=−49
ik .
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
209
4.17. Упростите выражение im для произвольного m ∈ Z.
4.18. Представьте комплексное число в тригонометрической форме:
1) 2;
2) 3i;
3) 4 + 3i;
4) −i;
5) −3 − 6i;
√
6) 2(1 + i);
√
7) 3(−1 + 3i);
9+i
.
8)
9−i
4.19. Представьте следующие комплексные числа в алгебраической форме z = Re z + i Im z:
π
π
1) z = cos + i sin ;
3
3
&
π '
π
2) z = 4 cos(− ) + i sin(− ) ;
2
2
√
3
;
3) z =
3π
3π
+ i sin
cos
4
4
π
π
4) z = cos(− ) + i sin(− ).
8
8
a + ib
, где a, b ∈ R,
a − ib
можно представить в виде экспоненты с чисто мнимым показателем, т. е. в виде
u = eiδ , δ ∈ R.
4.20. Докажите, что комплексное число вида u =
4.21. Вычислите ii .
4.22. Вычислите:
√
1) 8i;
√
2) 6 4096.
∗ 4.23. Докажите, что для корней из единицы ωk = e2πik/n , где k = 0, . . . , n−
−1, верны следующие утверждения [49]:
210
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
1) ωk+n/2 = −ωk для четных n и 0 k n/2 − 1;
2)
n−1
ωk = 0 для n > 1;
k=0
3)
n−1
ωk = (−1)n−1 .
k=0
∗ 4.24. Докажите справедливость равенств для корней из единицы ωk =
= e2πik/n , где 0 k n − 1, для всех натуральных значений n:
1)
n−1
(z − ωk ) = z n − 1;
k=0
2)
n−1
(ωk )d =
k=0
0,
n,
1 d n − 1;
d = n.
∗ 4.25. Докажите справедливость равенств для корней n-й степени из единицы ωk = e2πik/n , где k = 0, 1, . . . , n − 1, для всех значений n > 2:
1)
n−2
ωk ωk+1 = −ωn−1 ;
k=0
2)
3)
n−2
ωk−1 ωk+1
= −(1 + ωn−1 );
ωk
k=1
n−1
k,k =0
k<k 4)
ωk ωk = 0;
n−1
ωk ωk
n
=
.
1 − ω2
k,k =0 ωk −k
k<k ∗ 4.26. Пусть ωk = e2πik/n , где 0 k n − 1, — корни n-й степени из
единицы, x — произвольное комплексное число, причем x = ωk ни
n−1
ωk
.
для какого k. Вычислите сумму
k=0 x − ωk
∗ 4.27. Докажите, что для всех натуральных n ∈ N и комплексных α =
= 2πk, k ∈ Z, справедливы тождества Лагранжа11 [59]:
11
Powered by TCPDF (www.tcpdf.org)
Лагранж (Joseph-Louis Lagrange) (1736–1813) — французский математик, механик и астроном.
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
211
sin(nα/2)
cos[(n + 1)α/2];
sin (α/2)
sin(nα/2)
sin[(n + 1)α/2].
2) sin α + sin 2α + . . . + sin nα =
sin (α/2)
1) cos α + cos 2α + . . . + cos nα =
4.28. Докажите формулу Муавра для натуральных значений показателя
степени n, используя метод математической индукции.
∗ 4.29. Пользуясь формулой Муавра, выразите cos 3ϕ и sin 3ϕ через cos ϕ
и sin ϕ.
∗ 4.30. Выразите cos 4ϕ и sin 4ϕ через cos ϕ и sin ϕ.
∗ 4.31. Существуют соотношения, выражающие коэффициенты полинома
через его корни (формулы Виета12 ). Если α1 , α2 , . . . , αn — корни
полинома p(z) = xn + a1 xn−1 + . . . + an , причем каждый корень
взят соответствующее его кратности число раз, то выполняются
следующие равенства:
− a1 ,
α 1 + α2 + . . . + α n =
α1 α2 + α2 α3 + . . . + α1 αn + α2 α3 + . . . + αn−1 αn =
a2 ,
− a3 ,
α1 α2 α3 + α1 α2 α4 + . . . + αn−2 αn−1 αn =
...
α1 α2 . . . αn−1 + α1 α2 αn−2 αn + . . . + α2 α3 . . . αn = (−1)n−1 an−1 ,
α1 α2 . . . αn = (−1)n an .
Докажите справедливость формул Виета.
4.32. Пусть z1 , z2 — корни квадратного трехчлена p(z) = z 2 + uz + v.
Выразите следующие величины через коэффициенты u и v:
1) z12 + z22 ;
2) z1−2 + z2−2 .
4.33. Пусть z1 , z2 — корни квадратного трехчлена p(z) = z 2 + uz + v.
Выразите следующие величины через коэффициенты u и v:
1) z14 + z24 ;
2) z1−4 + z2−4 .
12
Виет (François Viète, seigneur de la Bigotière) (1540–1603) — французский математик.
212
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
4.34. Определите сумму и произведение всех корней для каждого уравнения:
1) z 3 + 3z 2 + 3z + 1 = 0;
2) z 4 + 10z 2 + 20 = 0.
4.35. Определите сумму и произведение всех корней для каждого уравнения:
1) z 100 − 100z 99 + z 98 = 0;
2) z 5 + z 4 + 1 = 0.
∗ 4.36. Вычислите определитель
z1 z2 z3 Δ = z3 z1 z2 ,
z2 z3 z1 где z1 , z2 и z3 — корни кубического уравнения z 3 + αz + β = 0
с комплексными коэффициентами α, β ∈ C.
∗ 4.37. Пользуясь формулой Кардано, решите уравнение z 3 − 3z + 2 = 0.
∗ 4.38. Решите уравнение 2z 3 − 13z 2 − 17z + 70 = 0, пользуясь формулой
Кардано.
4.39. Решите системы линейных уравнений, используя
⎧
⎪
⎪
⎨ (1 + i)x1 + (−2 + 2i)x2 + (1 + i)x3 =
а)
−x1 + (3 − i)x2 + (2 + i)x3 =
⎪
⎪
⎩
(−2 − i)x1 + (−1 − i)x3 =
метод Крамера:
1 − i,
−7 + 2i,
3 − 5i;
⎧
⎪
⎪
⎨ (−2 + 2i)x1 + (2 + i)x2 + (2 + 2i)x3 = 7i,
б)
(−1 + 2i)x1 + (−2 − i)x2 + 2ix3 = −8 + 2i,
⎪
⎪
⎩
(2 + 2i)x1 + 2ix2 + (1 − i)x3 = 2 + 4i;
⎧
⎪
⎪
⎨
в)
⎪
⎪
⎩
(−1 + i)x3 = 1 − 3i,
(−1 + i)x1 − x2 + (−1 − i)x3 = 3 − 2i,
x1 + (4 + i)x2 + (3 − i)x3 = 4 + 8i;
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
213
⎧
⎪
⎪
⎨ (4 + i)x1 − ix2 + 3x3 = −i,
г) 3x1 + 4x2 + (1 − i)x3 = −4 + 9i,
⎪
⎪
⎩
ix1 + 3x2 + x3 = −5 + 6i.
4.40. Решите системы линейных уравнений, используя
⎧
⎪
⎪
⎨ (2 + i)x1 + (1 − i)x2 + (1 − i)x3 =
а)
(1 − i)x1 + (−1 + i)x2 + ix3 =
⎪
⎪
⎩ −ix1 + (3 + i)x2 + (−1 − i)x3 =
метод Гаусса:
8i,
−2,
8 + 4i;
⎧
⎪
⎪
⎨ (4 − i)x1 + (4 − i)x2 − ix3 = 2 + 9i,
б)
5x1 + 3x2 − ix3 = 5 + 10i,
⎪
⎪
⎩ 2x1 + (2 + i)x2 + (1 + i)x3 = 3 + 5i;
⎧
⎪
⎪
⎨ (1 + 2i)x1 + (3 + 2i)x2 + (−2 + 2i)x3 = 11 + i,
в)
(4 − i)x1 + (−1 + 2i)x2 − x3 = 8 + 3i,
⎪
⎪
⎩
(1 + i)x1 + 2ix2 = 4 + 8i;
⎧
⎪
⎪
⎨ 5x1 + (−2 − i)x2 + (−3 − i)x3 = −12 − i,
г)
ix1 + (1 + 2i)x2 + (2 − i)x3 = −3 + i,
⎪
⎪
⎩
2ix2 + x3 = −4 + i.
∗ 4.41. Решите системы линейных уравнений относительно пяти переменных, используя метод Гаусса:
⎧
⎪
(4−i)x1 +ix2 +(−1+i)x3 +(4+2i)x4 +(−3+i)x5 = −5−9i,
⎪
⎪
⎪
⎪
⎪
2x1 −x2 −3x3 +(2−i)x4 +(−2−i)x5 = 3−5i,
⎪
⎨
а)
(1−i)x1 +(1−i)x2 +(2−i)x3 +(−2−i)x4 +3x5 = 10+11i,
⎪
⎪
⎪
⎪
(1+2i)x1 −2x2 +(2+2i)x3 −3x4 +(−2+i)x5 = −2,
⎪
⎪
⎪
⎩
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
б)
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
(−3+2i)x1 +x2 +(−2+i)x3 −ix4 +2ix5
=
−11+3i;
−3x1 +(−3−i)x2 +(2−i)x3 +(−2+i)x4 +ix5
=
−2−i,
−x1 +ix2 +(−3+2i)x3 +(1+i)x4 +(4+2i)x5
=
9+12i,
2ix1 +(2−i)x2 +3x3 +2x4 +(−2−i)x5
=
−9−5i,
(−3−i)x1 +(−3−i)x2 +ix3 +(1+i)x4 +(−1+i)x5
=
4,
(2+i)x1 +2x2 +(1+i)x3 +(3+2i)x5
=
−3+10i.
214
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
4.42. Какие из следующих матриц являются эрмитовыми?
1
2 + 10i
1)
;
2 − 10i
3
1 −1
1
;
2) √
2 −2 −2
2i
1 2 + 2i
;
3) √
6 −2i −2 + 2i
3 −i
4)
;
−i 3
⎡
⎤
1 0 2
⎥
1 ⎢
⎢
5) √ ⎣0 3 0 ⎥
⎦;
10
2 0 −i
⎡
⎤
1 1 1 1
⎢
⎥
⎢1 i −1 −i ⎥
⎢
⎥.
6) ⎢
⎥
1
−1
1
−1
⎣
⎦
1 −i −1 i
4.43. Какое условие накладывается на диагональные элементы эрмитовой матрицы?
4.44. Покажите, что если Z1 и Z2 — комплексные матрицы одного по1
рядка, то матрица (Z1 Z2 + Z2 Z1 ) является эрмитовой.
2
4.45. Антиэрмитовой, или косоэрмитовой, матрицей называется матрица A, для которой выполняется соотношение AH = −A. Другими
словами, эрмитово сопряжение такой матрицы приводит к умножению всех ее элементов на (−1). Какие из следующих матриц
являются антиэрмитовыми?
0
2+i
1
;
1) √
2 −2 + i
i
i −2
2)
;
3 −2i
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
215
2i
1 2+i
3)
;
3 −2i −2 + i
⎡
⎤
1 5 0
⎥
1⎢
4) ⎢
−5 2i −5⎥
⎣
⎦;
5
0 5 3i
⎡
⎤
−2i 1 0
⎥
1⎢
5) ⎢
−1 0 −3⎥
⎣
⎦;
5
0 3 2i
⎡
⎤
i i i i
⎢
⎥
⎢i i −i −i⎥
⎢
⎥.
6) ⎢
⎥
i
−i
i
−i
⎣
⎦
i −i −i i
4.46. Какое условие накладывается на диагональные элементы антиэрмитовой матрицы?
4.47. Какие из следующих матриц являются унитарными?
1 2 3
1)
;
3 2 1
1 −i
1
;
2) √
2 −i 1
2i
1 2+i
;
3)
3 −2i −2 + i
3 −i
1
4) √
;
10 −i 3
⎤
⎡
1 0 0
⎥
1 ⎢
⎢
5) √ ⎣0 e2i 0 ⎥
⎦;
10
4i
0 0 e
216
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
⎡
1
1
1
1
⎤
⎢
⎥
1 i −1 −i ⎥
1⎢
⎢
⎥.
6) ⎢
2 ⎣1 −1 1 −1⎥
⎦
1 −i −1 i
4.48. Какому условию должны удовлетворять комплексные
числа
u1 и
u2
u1
была
u2 и вещественное число ϕ, чтобы матрица
iϕ ∗
iϕ ∗
−e u2 e u1
унитарной?
4.49. На экзамене по курсу линейной алгебры студент утверждает, что
для любой квадратной матрицы A справедливо равенство
ln(exp A) = A. Прав ли студент?
∗ 4.50. Докажите тождество det(eA ) = etr A , справедливое для произвольной квадратной матрицы A с комплексными коэффициентами.
4.51. Докажите теорему 4.4 (см. с. 197): определитель унитарной матрицы есть комплексное число, модуль которого равен единице.
4.52. Вычислите коммутаторы матриц Паули [σ1 , σ2 ], [σ2 , σ3 ] и [σ3 , σ1 ].
4.53. Вычислите произведение матриц Паули σ1 σ2 σ3 .
∗ 4.54. Докажите обобщение тождества Эйлера для матриц Паули σ1 ,
σ2 и σ 3 :
exp(iσk ϕ) = I cos ϕ + iσk sin ϕ для k = 1, 2, 3, ϕ ∈ R,
1 0
где I =
— единичная матрица второго порядка.
0 1
4.55. Чему равен квадрат матрицы Дирака β?
4.56. Вычислите произведение матриц Дирака α1 α2 α3 β.
4.57. Вычислите результат действия квантовой схемы
S
H
X
H
на кубит, находящийся первоначально в состоянии |0 .
4.58. Вычислите результат действия квантовой схемы
Z
H
Y
T
на кубит, находящийся первоначально в состоянии |1 .
(4.58)
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
217
4.59. Вычислите результат действия квантовой схемы
S
H
S
H
T
на кубит, находящийся первоначально в состоянии |ψ = u |0 +
+v |1 , где u, v ∈ C.
4.60. Покажите, что квантовая схема
•
переводит состояние |ψ1 ψ2
•
•
в состояние |ψ2 ψ1 .
Ответы и решения к главе «Комплексные
числа и матрицы»
4.1. Решение.
1) Операции с комплексными числами следует производить аналогично соответствующим операциям с алгебраическими полиномами, используя свойство i2 = −1:
(3 + i)(2 + 5i) = 3 · 2 + 3 · (5i) + i · 2 + i · (5i) =
= 6 + 15i + 2i + 5i2 = 6 + 17i + 5(−1) = 1 + 17i;
2) (3 − i)(3 + i) = 32 − i2 = 10;
3) (1 − i)4 + (1 + i)4 = (1 − 4i + 6i2 − 4i3 + i4 ) + (1 + 4i + 6i2 + 4i3 + i4 ) =
= 2 1 + 6i2 + (i2 )2 = 2 1 + 6(−1) + (−1)2 = −8;
4) 2 − i3 = 2 − i · i2 = 2 + i.
4.2. Ответ:
1) −1 + 3i;
2) 29 + 14i;
3) −5 + 2i;
4) 2i.
4.3. Решение.
Проводим алгебраические преобразования, учитывая, что i2 = −1:
z1 z3 − z22 = (5 + i)(−1 + 3i) − (4 − i)2 = 5 · (−1) + 5 · (3i) + i · (−1) +
+i · (3i) − (16 − 8i + i2 ) = −8 + 14i − 15 + 8i = −23 + 22i.
218
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
4.4. Решение.
Выполняем алгебраические действия: z1 z2 = 1 + 3i, z33 = i, z13 =
= −11 + 2i, z33 − z13 = 11 − i. В итоге z1 z2 (z33 − z13 ) = 14 + 32i.
4.5. Решение.
1) Выполняем алгебраические преобразования:
(1 + 4i)3 + (1 − 4i)3 =
= (1 + 4i + 1 − 4i)((1 + 4i)2 − (1 − 4i)(1 + 4i) + (1 − 4i)2 ) =
= 2(1 + 8i − 16 − 17 + 1 − 8i − 16) = −47 · 2 = −94.
2) Воспользуемся формулой бинома Ньютона13 :
(a + b)n =
n
C(n, k)an−k bk ,
k=0
справедливой для всех a, b ∈ C и натуральных n:
(6 − i)4 + (6 + i)4 = 64 − 4 · 63 · i + 6 · 62 · (−1) − 4 · 6i · (−1) + (−1) · (−1) +
+ 64 + 4 · 63 · i + 6 · 62 · (−1) + 4 · 6i · (−1) + (−1) · (−1) = 2162.
4.6. Решение.
z1
Обозначим z1 = a + ib, z2 = c + id. Дробь вида , где z1 , z2 ∈ C,
z2
z2∗
удобно преобразовать, умножив ее на 1 ≡ ∗ :
z2
z1
z1 z2∗
z1 z2∗
z1 z2∗
z1
=
·1=
· ∗=
=
.
∗
z2
z2
z2 z 2
z2 z2
|z2 |2
Поэтому результатом деления двух комплексных чисел z1 /z2 , причем
z2 = 0, будет число
ac + bd
bc − ad
z1
= 2
+i 2
.
2
z2
c +d
c + d2
4.7. Решение.
Воспользовавшись приемом, предложенным в предыдущем упражнении (т. е. z1 /z2 = (z1 z2∗ )/(z2 z2∗ ) = (z1 z2∗ )/|z2 |2 ), получим:
3 + i (3 + i)(3 + i) 1
1)
=
= (4 + 3i);
3−i
9 − i2
5
13
Ньютон (Isaac Newton) (1643–1727) — английский математик, физик, механик, астроном.
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
219
1 + 3i (1 + 3i)2
1
=
= (−4 + 3i);
2
1 − 3i
1 − 9i
5
1
2−1
2 + i2
= (3 + i);
=
3)
3 + i3
3 + i2 · i 10
i
i
i(1 − i) + i(1 + i)
4)
+
=
= i.
1+i 1−i
(1 + i)(1 − i)
2)
4.8. Решение.
Находим z2 и z3 : z2 = 2 − i, z3 = (2 + i) + (2 − i) = 4. После этого
получаем: (z1 − z3 )(z2 − z3 )/z2 = (2 + i − 4)(2 − i − 4)/(2 − i) = −(2 −
−i)(−2 − i)/(2 − i) = 2 + i.
4.9. Решение.
Найдем z1 и z2 : z2 = −7 − 2i, z3 = −5 + 2i.
Далее, z1 z2 = −45 − 28i, z2 z3 = 39 − 4i, z1 z3 = −39 + 4i, z1 z2 + z2 z3 +
+z1 z3 = −45 − 28i.
Окончательный ответ: (z1 z2 + z2 z3 + z1 z3 )/z1 = −7 − 2i.
4.10. Ответ:
1
1) z = (−4 + 3i);
5
1
2) z = (2 − 9i).
5
4.11. Решение.
Пусть z = a + ib, тогда z − 3z ∗ = (a + ib) − 3(a − ib) = −2a + 4ib.
Поскольку комплексные числа равны тогда и только тогда, когда равны
их вещественные и мнимые части, получаем
−2a = 18,
a = −9,
⇔
4b = 4;
b = 1,
откуда z = −9 + i.
5
4.12. Ответ: z = − + i.
2
4.13. Доказательство.
Пусть z1 = x1 + iy1 , z2 = x2 + iy2 , где x1 , x2 , y1 , y2 ∈ R.
1) Выразим левую часть равенства через x1 , x2 , y1 и y2 :
(z1 + z2 )∗ = [(x1 + x2 ) + i(y1 + y2 )]∗ = (x1 + x2 ) − i(y1 + y2 ).
Теперь преобразуем его правую часть
z1∗ + z2∗ = (x1 − iy1 ) + (x2 − iy2 ) = (x1 + x2 ) − i(y1 + y2 ).
220
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
Поэтому ∀z1 , z2 ∈ C (z1 + z2 )∗ = z1∗ + z2∗ .
2) Левая часть равенства
(z1 z2 )∗ = [(x1 + iy1 )(x2 + iy2 )]∗ = (x1 x2 − y1 y2 ) − i(x1 y2 + x2 y1 ).
Правая часть совпадает с левой:
z1∗ z2∗ = (x1 − iy1 )(x2 − iy2 ) = (x1 x2 − y1 y2 ) − i(x1 y2 + x2 y1 ) = (z1 z2 )∗ .
4.14. Доказательство.
Представим число с модулем, равным единице, в показательной форме: z = eiϕ . После алгебраических преобразований
z −1 = (eiϕ )−1 = e−iϕ = (eiϕ )∗ = z ∗
получаем равенство z −1 = z ∗ .
4.15. Указание.
Воспользуйтесь геометрической интерпретацией чисел z1 и z2 . Длина
стороны произвольного треугольника не больше суммы длин двух других сторон и не меньше абсолютной величины их разности.
4.16. Решение.
Воспользуемся формулой для суммы геометрической прогрессии:
n
qk = q + . . . + qn =
k=1
10
1)
ik =
k=1
−2i(−i − 1)
i11 − i −i − i
= −1 + i.
=
=
i−1
i−1
(i − 1)(−i − 1)
99
1 i(k+49) .
i49 k=−99
k=−49
В последней сумме проведем замену индекса суммирования k = k + 49.
Тогда искомая сумма примет следующий вид:
2)
49
k=−49
49
q n+1 − q
.
q−1
ik =
ik = i−49
98
ik = i−48−1
k =0
= −i ·
i99 − 1
i99 − 1
= −i ·
=
i−1
i−1
i3 − 1
i4 − i 1 − i
i96 · i3 − 1
= 1.
= −i ·
=−
=
i−1
i−1
i−1
i−1
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
221
4.17. Решение.
Мнимая единица обладает свойством i4 = 1. Рассмотрим четыре случая в зависимости от остатка деления m на 4:
1) m = 4k, k ∈ Z,
im = i4k = (i4 )k = 1k = 1;
2) m = 4k + 1, k ∈ Z,
im = i4k+1 = i4k · i = 1 · i = i;
3) m = 4k + 2, k ∈ Z,
im = i4k+2 = i4k · i2 = i2 = −1;
4) m = 4k + 3, k ∈ Z,
im = i4k+3 = i4k · i3 = −i.
Таким образом, окончательно получаем
⎧
1, если m = 4k, k ∈ Z;
⎪
⎪
⎪
⎨ i,
если m = 4k + 1, k ∈ Z;
im =
⎪
−1, если m = 4k + 2, k ∈ Z;
⎪
⎪
⎩
−i,
если m = 4k + 3, k ∈ Z.
4.18. Решение.
1) Для перехода к тригонометрической форме комплексного числа
необходимо определить модуль ρ = |z| и аргумент ϕ = arg z. Воспользовавшись формулами для ρ и ϕ, получим
/
/
ρ = x2 + y 2 = 22 + 02 = 2,
y
+ 2πk = 0 + 2πk = 2πk, k ∈ Z,
x
поэтому тригонометрическая форма числа 2 имеет вид
ϕ = arctg
2(cos(2πk) + i sin(2πk)), где k ∈ Z.
√
π
π
2) ρ = 0 + 32 = 3, ϕ = sgn(3) + 2πk = + 2πk, поэтому 3i =
2
& &π
'
&π 2
''
= 3 cos
+ 2πk + i sin
+ 2πk , k ∈ Z.
2
2
222
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
3
3) ρ = 16 + 9 = 5, ϕ = arctg
+ 2πk ,
4
3
3
+
2πk
+
i
sin
arctg
+
2πk
, k ∈ Z.
4 + 3i = 5 cos arctg
4
4
π
π
4) ρ = 1, ϕ = sgn(−1) + 2πk = − + 2πk;
2
2
−i = cos(π(2k − 1/2)) + i sin(π(2k − 1/2)), k ∈ Z.
√
√
5) ρ = 9 + √
36 = 3 5, ϕ = arctg 2 − π + 2πk,
−3 − 6i = 3 5(cos(arctg 2 + π(2k − 1)) + i sin(arctg 2 + π(2k − 1))),
k ∈ Z.
6) ρ =√2, ϕ = π/4 + 2πk,
√
2 + 2i = 2(cos(π/4 + 2πk) + i sin(π/4 + 2πk)), k ∈ Z.
√
30, ϕ =√arctg(−3) + π + 2πk,
7)√ρ = √
− 3 + 3 3i = 30(cos(π − arctg 3 + 2πk)) + i sin(π − arctg 3 + 2πk)),
k ∈ Z.
8) Домножим числитель и знаменатель дроби на величину (9 + i) и
преобразуем полученное выражение:
√
(9 + i)(9 + i)
80 + 18i 40
9
9+i
=
=
=
− i,
9 − i (9 − i)(9 − i)
82
41 41
0&
ρ=
лучаем:
40 '2 & 9 '2
9
+
= 1, ϕ = − arctg
+ 2πk. Окончательно по41
41
41
&
&
9+i
9'
9'
= cos 2πk − arctg
+ i sin 2πk − arctg
,
9−i
40
40
4.19. Решение.
√
3
π
1
π
i;
1) cos + i sin = +
2
2 '
& 3 π3
π
= −4i;
2) 4 cos − + i sin −
√ 2
√2
√
3
6
6
3)
=− i−
;
3π
3π
2
2
+ i sin
cos
4
4
/
/
√
√
π
π
2+ 2
2− 2
4) cos − + i sin −
=
−
i.
8
8
2
2
k ∈ Z.
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
223
4.20. Доказательство.
Перейдем к экспоненциальной форме числа u. Пусть a + ib = ρeiϕ ,
тогда a − ib = ρe−iϕ и
u=
eiϕ
a + ib
= −iϕ = eiϕ · eiϕ = e2iϕ .
a − ib e
Поэтому u = eiδ , где δ = 2ϕ.
4.21. Решение.
Показательная форма записи мнимой единицы имеет вид i = eiπ/2+2πik ,
где k ∈ Z. Записав мнимую единицу в основании степени в форме экспоненты и используя тождество (ea )b ≡ eab [24], получим
ii = (eiπ/2+2πik )i = ei
2
(π/2+2πk)
= e−π/2+2πk , где k, k ∈ Z.
Как видно из рассмотренного примера, показательная функция является многозначной функцией на множестве комплексных чисел C.
4.22. Ответ:
√
1) 8i = ±2(1 + i);
√
√
√
2) 6 4096 ∈ {±4, ±2(1 ± i 3), ±2(1 ∓ i 3)}.
4.23. Доказательство.
1) Преобразуем показательную форму записи числа ωk+n/2 :
ωk+n/2 = e
2πi(k+n/2)
n
=e
2πik
n
eπi = ωk eπi .
Используя равенство eπi = −1, получаем: ωk+n/2 = −ωk для четных
n и k = 0, 1, . . . , n/2 − 1.
2) Величины ωk образуют геометрическую прогрессию, знаменатель
которой равен ω1 = e2πi/n . Используя известную формулу для суммы
1 − q n+1
для |q| < 1,
геометрической прогрессии 1 + q + q 2 + . . . + q n =
1−q
получаем
n−1
n−1
(e2πi/n )n − 1
= 0.
ωk =
e2πik/n = 2πi/n
e
−1
k=0
k=0
3)
n−1
$
k=0
ωk =
n−1
$
k=0
n−1
e
2πik/n
= ek=0
2πik/n
=e
(2πi
n−1
k=0
k)/n
.
224
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
Сумма в показателе экспоненты равна
n−1
k=0
n−1
$
k=
n(n − 1)
, значит,
2
ωk = eπi(n−1) = cos π(n − 1) + i sin π(n − 1) = (−1)n−1 .
k=0
4.26. Ответ:
xn
n
.
−1
4.27. Доказательство.
n
eiαk . Легко видеть, что выполняются слеРассмотрим сумму Z =
k=1
дующие соотношения:
cos α + cos 2α + . . . + cos nα = Re Z,
sin α + sin 2α + . . . + sin nα = Im Z.
Вычислим Z, используя формулу для суммы геометрической прогрессии:
n
eiα(n+1) − eiα
eiαk =
.
Z=
eiα − 1
k=1
e−iα/2
Упростим полученное выражение, домножив дробь на 1 = −iα/2 и
e
выполнив простые преобразования:
Z=
eiα(n+1) − eiα e−iα/2
eiα(n+1/2) − eiα/2
·
=
.
eiα − 1
e−iα/2
eiα/2 − e−iα/2
Знаменатель полученной дроби равен eiα/2 − e−iα/2 = 2i sin α/2. Перепишем экспоненты в числителе, используя формулу Эйлера:
1
cos[(n+1/2)α]+i sin[(n+1/2)α]−(cos α/2+i sin α/2) =
Z=
2i sin α/2
sin[(n + 1/2)α] − sin α/2 cos[(n + 1/2)α] − cos α/2
=
.
+
2 sin α/2
2i sin α/2
Далее воспользуемся известными тригонометрическими формулами
(см. Приложение B, формулы (B.16) и (B.18)):
a+b
a−b
cos
,
2
2
a+b
a−b
sin
.
cos a − cos b = −2 sin
2
2
sin a − sin b =
2 sin
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
225
Получаем
sin(nα/2)
sin(nα/2)
Z=
cos[(n + 1)α/2] + i
sin[(n + 1)α/2],
sin (α/2)
sin (α/2)
откуда непосредственно следуют тождества Лагранжа.
4.28. Доказательство.
Обозначим предикат «(cos ϕ+i sin ϕ)n = cos nϕ+i sin nϕ» через P (n)
и докажем утверждение ∀n P (n) методом математической индукции.
База индукции
Для n = 1 получаем верное тождество (cos ϕ + i sin ϕ)1 = cos ϕ +
+ i sin ϕ, поэтому P (1) — истинно.
Шаг индукции
Предположим, что P (k), k ∈ N истинно. Докажем истинность высказывания P (k + 1). Требуется доказать, что
(cos ϕ + i sin ϕ)k+1 = cos (k + 1)ϕ + i sin (k + 1)ϕ.
Рассмотрим выражение (cos ϕ + i sin ϕ)k+1 и представим его в виде
(cos ϕ + i sin ϕ)k+1 = (cos ϕ + i sin ϕ)k · (cos ϕ + i sin ϕ).
По индуктивному предположению первый множитель равен
(cos ϕ + i sin ϕ)k = cos kϕ + i sin kϕ.
Тогда
(cos ϕ + i sin ϕ)k+1 = (cos kϕ + i sin kϕ) · (cos ϕ + i sin ϕ).
Раскроем скобки в полученном выражении, воспользовавшись известными тождествами для тригонометрических функций, приведенными в
Приложении B, формулы (B.11) и (B.9):
cos(a + b) = cos a cos b − sin a sin b,
sin(a + b) = sin a cos b + cos a sin b,
полагая a = kϕ, b = ϕ. Получаем
(cos ϕ + i sin ϕ)k+1 = (cos kϕ cos ϕ − sin kϕ sin ϕ) +
!"
#
cos (k+1)ϕ
+ i (sin kϕ cos ϕ + cos kϕ sin ϕ) .
!"
#
sin (k+1)ϕ
226
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
Значит, по принципу математической индукции формула Муавра
(cos ϕ + i sin ϕ)n = cos nϕ + i sin nϕ
справедлива для любых натуральных значений n ∈ N.
4.29. Решение.
Рассмотрим более общий случай условия задачи и выразим cos nϕ и
sin nϕ через косинус и синус угла ϕ.
Для этого заметим, что в левой части формулы Муавра (4.7) стоит
выражение, которое можно раскрыть по формуле бинома Ньютона (см.
с. 207). Таким образом, представим левую часть в виде:
(cos ϕ + i sin ϕ)n =
n
C(n, j)(cosn−j ϕ)(i sin ϕ)j =
j=0
=
n
ij C(n, j) cosn−j ϕ sinj ϕ.
j=0
Удобно разбить данную сумму на две суммы — по четным (j = 2k) и
нечетным (j = 2k + 1) значениям j и ввести новую переменную суммирования k ∈ N:
(cos ϕ + i sin ϕ)n =
n/2
=
i2k C(n, 2k) cosn−2k ϕ sin2k ϕ +
k=0
(n−1)/2
+
i2k+1 C(n, 2k + 1) cosn−2k−1 ϕ sin2k+1 ϕ =
k=0
n/2
=
(−1)k C(n, 2k) cosn−2k ϕ sin2k ϕ +
k=0
(n−1)/2
+i
(−1)k C(n, 2k + 1) cosn−2k−1 ϕ sin2k+1 ϕ.
k=0
Теперь осталось воспользоваться тем, что cos nϕ = Re (cos ϕ+i sin ϕ)n ,
sin nϕ = Im (cos ϕ + i sin ϕ)n . Получаем формулы для косинуса и синуса
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
227
кратного аргумента:
n/2
cos nϕ =
(−1)k C(n, 2k) cosn−2k ϕ sin2k ϕ,
k=0
(n−1)/2
sin nϕ =
(−1)k C(n, 2k + 1) cosn−2k−1 ϕ sin2k+1 ϕ.
k=0
Для n = 3 полученные формулы принимают вид
cos 3ϕ =
sin 3ϕ =
1
(−1)k C(3, 2k) cos3−2k ϕ sin2k ϕ = cos3 ϕ − 3 cos ϕ sin2 ϕ,
k=0
1
(−1)k C(3, 2k + 1) cos3−2k−1 ϕ sin2k+1 ϕ = 3 cos2 ϕ sin ϕ−sin3 ϕ.
k=0
4.30. Ответ.
cos 4ϕ =
2
(−1)k C(4, 2k) cos4−2k ϕ sin2k ϕ =
k=0
= cos4 ϕ − 6 cos2 ϕ sin2 ϕ + sin4 ϕ,
sin 4ϕ =
1
(−1)k C(4, 2k + 1) cos4−2k−1 ϕ sin2k+1 ϕ =
k=0
= 4 cos3 ϕ sin ϕ − 4 cos ϕ sin3 ϕ.
4.31. Указание.
Перемножьте скобки в правой части факторизации полинома p(z) и
сравните полученные коэффициенты при одинаковых степенях с коэффициентами p(z).
4.32. Решение.
1) Представим z12 + z22 в виде:
z12 + z22 = (z1 + z2 )2 − 2z1 z2
228
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
и выразим сумму и произведение корней p(z) по формулам Виета, доказанным в предыдущем упражнении:
z12 + z22 = (−u)2 − 2v = u2 − 2v.
2)
1
1
z12 + z22
u2 − 2v
+
=
=
.
z12 z22
z12 z22
v2
4.33. Ответ:
1) z14 + z24 = (u2 − 2v)2 − 2v 2 ;
2)
1
1
(u2 − 2v)2 − 2v 2
+ 4=
.
4
z1 z2
v4
4.34. Ответ:
3
3
1)
zk = −3,
zk = −1;
k=1
2)
4
k=1
k=1
zk = 0,
4
zk = 20.
k=1
4.35. Ответ:
4
4
1)
zk = 100,
zk = 0;
k=1
2)
5
k=1
k=1
zk = −1,
5
zk = −1.
k=1
4.36. Решение.
В определителе к первой строке прибавим вторую и третью строки:
z1 + z2 + z3 z1 + z2 + z3 z1 + z2 + z3 .
Δ = z3
z1
z2
z2
z3
z1
Согласно формулам Виета (см. упр. 4.31), сумма всех корней z1 + z2 + z3
равна коэффициенту при квадратичном члене z 2 , взятому с обратным
знаком. Для уравнения z 3 + αz + β = 0 имеем z1 + z2 + z3 = 0, и,
следовательно, в определителе Δ первая строка состоит полностью из
нулевых элементов. Ясно, что такой определитель равен нулю.
4.37. Ответ: z1 = −2, z2 = z3 = 1.
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
229
5
4.38. Ответ: z1 = 7, z2 = − , z3 = 2.
2
4.39. Ответ:
а) [x1 , x2 , x3 ]T = [2i, −2, i]T ;
б) [x1 , x2 , x3 ]T = [i, 1, 2 + 2i]T ;
в) [x1 , x2 , x3 ]T = [−3, 3, −2 + i]T ;
г) [x1 , x2 , x3 ]T = [1, −1 + 2i, −2 − i]T .
4.40. Ответ:
а) [x1 , x2 , x3 ]T = [2i, 1 + i, −2 + 2i]T ;
б) [x1 , x2 , x3 ]T = [3 + 2i, −3 + i, 3 − i]T ;
в) [x1 , x2 , x3 ]T = [2, 3 − i, −1 + 2i]T ;
г) [x1 , x2 , x3 ]T = [−2 + 2i, 3i, 2 + i]T .
4.41. Ответ:
а) [x1 , x2 , x3 , x4 , x5 ]T = [2 + i, i, −1 + i, −2, 1 + 2i]T ;
б) [x1 , x2 , x3 , x4 , x5 ]T = [i, −2, −1 − i, 1 + i, 2 + 2i]T .
4.42. Ответ: эрмитовыми являются матрицы 1) и 2).
4.43. Ответ: диагональные элементы эрмитовой матрицы действительны.
4.44. Доказательство.
1
Введем обозначение W = (Z1 Z2 +Z2 Z1 ) и найдем эрмитово-сопряжен2
ную матрицу по отношению к W :
H
1
1
1
H
(Z1 Z2 +Z2 Z1 )
= ((Z1 Z2 )H +(Z2 Z1 )H ) = (Z2 Z1 +Z1 Z2 ) = W.
W =
2
2
2
Доказано, что W является эрмитовой матрицей.
4.45. Ответ: антиэрмитовыми являются матрицы 1), 5), 6).
4.46. Ответ: диагональные элементы антиэрмитовой матрицы являются чисто мнимыми величинами.
4.47. Ответ: унитарными являются матрицы 2), 3), 4), 6).
4.48. Ответ: |u1 |2 + |u2 |2 = 1, ϕ ∈ R — любое.
4.49. Решение.
Студент в данном случае ошибается, поскольку для A = 2πiI, где
I — единичная матрица, имеем: exp(A) = e2πi I = I, следовательно,
ln(exp(A)) = O = A.
230
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
4.50. Указание.
Для диагональной матрицы det(eA ) = eλ1 eλ2 . . . eλn = etr A . Недиагональную матрицу либо диагонализируем, если это возможно, либо с
любой наперед заданной точностью приближаем последовательностью
матриц, каждая из которых диагонализируема.
4.51. Доказательство.
Пусть U — произвольная унитарная матрица. Используя свойство 6)
эрмитового сопряжения (см. с. 195), модуль определителя U представим
в следующем виде:
2
/
∗
| det U | = (det U )(det U ) = (det U )(det U H ).
Поскольку произведение определителей матриц равно определителю их
произведения, ∀A, B (det A · det B = det(AB)), то
2
√
| det U | = det(U U H ) = det I = 1.
Таким образом, модуль определителя унитарной матрицы равен единице.
4.52. Ответ: [σ1 , σ2 ] = 2iσ3 , [σ2 , σ3 ] = 2iσ1 , [σ3 , σ1 ] = 2iσ2 .
4.53. Ответ: σ1 σ2 σ3 = iI, где I — единичная матрица размера 2 × 2.
4.55. Ответ: β 2 = I, где I — единичная матрица размера 4 × 4.
4.56. Ответ:
⎡
4.57. Решение.
0 0 −i
⎢
⎢0 0
α1 α 2 α 3 β = ⎢
⎢i 0
⎣
0
0 i
0
0
0
⎤
⎥
−i⎥
⎥.
0⎥
⎦
0
1
Состояние кубита |0 описывается матрицей
. Принимая во внима0
ние матричное представление квантовых элементов H, S и X из табл. 4.1,
получим:
⎡1 − i⎤
1 0 1 1 1
0 1 1
1 1 1
⎥
⎢
√
= ⎣ 2 ⎦.
|ψ → |ψ = √
1
+
i
2 1 −1 0 i
2 1 −1 1 0 0
2
ГЛАВА 4. КОМПЛЕКСНЫЕ ЧИСЛА И МАТРИЦЫ
231
Таким образом, в результате действия квантовой схемы на кубит, находящийся в состоянии |ψ = |0 , он перейдет в состояние
|ψ =
1−i
1+i
|0 +
|1 .
2
2
4.58. Ответ: в результате действия квантовой схемы на кубит, находящийся в состоянии |ψ = |1 , он перейдет в состояние
|ψ =
&
&1 − i'
i '
− √ |0 −
|1 .
2
2
4.59. Ответ: кубит, находящийся в состоянии |ψ = u |0 + v |1 ,
&1
&1
1 '
1 '
перейдет в состояние |ψ =
(1+i)u+ √ v |0 + (1+i)u− √ v |1 .
2
2
2
2
Глава 5
Векторные пространства
Под n-мерным арифметическим вектором будем понимать упорядоченный набор из n вещественных чисел.
Числа xi (i = 1, 2, . . . , n) называют координатами, или компонентами, вектора x. Они записываются либо в строку: x = (x1 , x2 , . . . , xn ),
либо в столбец:
⎡ ⎤
x1
⎢ ⎥
⎢ x2 ⎥
⎥
(5.1)
x=⎢
⎢ ... ⎥ .
⎣ ⎦
xn
Для обозначения векторов и отличия их от скалярных величин используется полужирный шрифт, например a, b, c и т. п.1
Векторы x = (x1 , x2 , . . . , xn ) и y = (y1 , y2 , . . . , yn ) называют равными, если выполняются равенства x1 = y1 , x2 = y2 , . . . , xn = yn .
Суммой векторов x и y называют вектор
x + y = (x1 + y1 , x2 + y2 , . . . , xn + yn ).
(5.2)
Произведением числа α на вектор x называют вектор
αx = (αx1 , αx2 , . . . , αxn ).
(5.3)
Разностью векторов x и y называют вектор
x − y = x + (−1)y = (x1 − y1 , x2 − y2 , . . . , xn − yn ).
(5.4)
Нулевым называют вектор 0 = (0, 0, . . . , 0), имеющий нулевые координаты. Очевидно, что x + 0 = x − 0 = x.
1
Используется и другое обозначение вектора, когда ставится стрелка над его символом. Напри→
−
→
мер, векторы a и b таким способом будут обозначены как −
a и b.
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
233
Для вектора x ∈ R через −x обозначим вектор с координатами
(−x1 , −x2 , . . . , −xn ),
(5.5)
такой вектор называется противоположным по отношению к x.
Из введенных определений следует, что −x = (−1)·x и x+(−x) = 0.
Множество всех арифметических векторов с введенными над ними
операциями сложения и умножения на число называют n-мерным
арифметическим пространством и обозначают Rn [23, 51].
Пример 5.1. R1 — это одномерное пространство (прямая), R2 — дву
мерное пространство (плоскость), R3 — трехмерное пространство.
5.1.
Линейная зависимость векторов
в пространстве Rn
Рассмотрим набор векторов x1 , x2 , . . . , xk ∈ Rn и вещественные числа
α1 , α2 , . . . , αk ∈ R.
Вектор x = α1 · x1 + α2 · x2 + . . . + αk · xk называют линейной
комбинацией векторов x1 , x2 , . . . , xk .
Пример 5.2. Пусть даны векторы
⎡ ⎤
⎡ ⎤
⎡ ⎤
3
4
5
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢
⎥
⎢
⎥
⎢
(5.6)
x1 = ⎣−2⎦ , x2 = ⎣3⎦ , x3 = ⎣3⎥
⎦.
−1
0
⎡
−1
7
⎤
⎢
⎥
⎥
Тогда вектор x = 2x1 − 3x2 + x3 = ⎢
⎣−10⎦ есть линейная комбинация
5
векторов x1 , x2 , x3 .
Система векторов x1 , x2 , . . . , xk называется линейно независимой,
если из равенства α1 · x1 + α2 · x2 + . . . + αk · xk = 0 следует, что α1 =
= α2 = . . . = αk = 0.
Если существует набор вещественных чисел α1 , α2 , . . . , αk , среди которых хотя бы одно не равно нулю, то систему векторов называют линейно зависимой.
Пример 5.3. Даны векторы x1 = (2, −3) и x2 = (4, 5). Покажем, что
они линейно независимы.
234
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
Найдем решение системы уравнений
2
4
0
α1
+ α2
=
,
−3
5
0
α1 · 2 + α2 · 4 = 0,
α1 · (−3) + α2 · 5 = 0.
(5.7)
(5.8)
Поскольку эта система имеет единственное решение α1 = α2 = 0, то
векторы x1 и x2 линейно независимы.
Замечание. Пусть векторы x1 , x2 , . . . , xk линейно зависимы. Тогда
по крайней мере один из коэффициентов αi отличен от нуля (например,
α1 = 0). В этом случае можно записать:
α2
α3
αk
(5.9)
x1 = − x2 − x3 − . . . − xk .
α1
α1
α1
Таким образом, если векторы линейно зависимы, то один из них линейно выражается через все остальные [51]. Справедливо и обратное
утверждение: если один из векторов набора линейно выражается через
остальные, то эти векторы линейно зависимы. Последнее свойство можно
рассматривать как определение линейной зависимости векторов.
5.2.
Базис в пространстве Rn
Прежде чем ввести понятие базиса в линейном пространстве Rn , докажем следующую теорему.
Теорема 5.1. Любая система из n + 1 векторов в пространстве Rn
является линейно зависимой.
Доказательство. Возьмем произвольные n + 1 векторов
xi = (x1i , x2i , . . . , xni ),
(5.10)
где i = 1, 2, . . . , n + 1.
Составим их линейную комбинацию и приравняем ее нулевому вектору:
(5.11)
α1 · x1 + α2 · x2 + . . . + αn+1 · xn+1 = 0.
Расписывая это равенство покоординатно, придем к системе из n уравнений с n + 1 неизвестными α1 , α2 , . . . , αn+1 :
⎧
⎪
⎪
⎨ α1 · x11 + α2 · x12 + . . . + αn+1 · x1 n+1 = 0,
(5.12)
....................................
⎪
⎪
⎩ α1 · xn1 + α2 · xn2 + . . . + αn+1 · xn n+1 = 0.
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
235
Матрица системы (5.12) отличается от соответствующей расширенной матрицы только нулевым столбцом, поэтому их ранги совпадают.
Следовательно, по теореме Кронекера – Капелли система имеет бесконечно много решений. Среди них обязательно будет и ненулевое решение. Таким образом, существует ненулевой набор коэффициентов α1 , α2 ,
. . . , αn+1 , при котором линейная комбинация векторов x1 , x2 , . . . , xn+1
равна нулевому вектору. Следовательно, векторы xi , где 1 i n + 1,
являются линейно зависимыми.
Любая система из n линейно независимых векторов b1 , b2 , . . . , bn называется базисом векторного пространства.
Рассмотрим в пространстве Rn систему векторов:
e1 = (1, 0, . . . , 0),
e2 = (0, 1, . . . , 0),
... ... ............
(5.13)
en = (0, 0, . . . , 1).
Эти векторы линейно независимы, поскольку из условия
α1 · e 1 + . . . + α n · e n = 0
(5.14)
непосредственно следует система равенств α1 = α2 = . . . = αn = 0.
Векторы e1 , e2 , . . . , en называют ортами пространства Rn , они образуют базис в этом пространстве.
Вывод: линейно независимая система векторов в Rn может иметь
самое большее n векторов.
Рассмотрим систему из n векторов
xi = (x1i , x2i , . . . , xni ), где i = 1, 2, . . . , n.
Составим матрицу из координат
⎡
x11 x12
⎢
⎢ x21 x22
⎢
..
⎢ ...
.
⎣
xn1 xn2
векторов:
⎤
. . . x1n
⎥
. . . x2n ⎥
⎥
. . . ... ⎥ .
⎦
. . . xnn
(5.15)
(5.16)
Такую матрицу называют матрицей системы векторов, а ее определитель — определителем системы векторов.
Теорема 5.2. Для того чтобы система из n векторов являлась
базисом, необходимо и достаточно, чтобы определитель системы был
отличен от нуля.
236
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
Доказательство. Рассмотрим произвольную систему из n векторов
xi = (x1i , x2i , . . . , xni ), i = 1, 2, . . . , n.
(5.17)
Составим их линейную комбинацию и приравняем ее к нулевому вектору:
⎤ ⎡ ⎤
⎡
0
α1 · x11 + α2 · x12 + . . . + αn · x1n
⎥ ⎢ ⎥
⎢
⎢ α1 · x21 + α2 · x22 + . . . + αn · x2n ⎥ ⎢0⎥
⎥ = ⎢ ⎥.
⎢
(5.18)
⎢.⎥
⎢
.............................. ⎥
⎦ ⎣ .. ⎦
⎣
α1 · xn1 + α2 · xn2 + . . . + αn · xnn
0
Получим однородную систему из n уравнений с n неизвестными и
определителем, отличным от нуля. Такая система в этом случае имеет
только нулевое решение, т. е. αi = 0, где i = 1, 2, . . . , n, и система векторов является базисом.
Теорема 5.3. Пусть векторы x1 , x2 , . . . , xn образуют базис. Тогда
любой вектор y из Rn можно представить, причем единственным способом, в виде линейной комбинации векторов xi (i = 1, 2, . . . , n):
y = α1 · x1 + α2 · x2 + . . . + αn · xn .
Доказательство.
Запишем разложение (5.19) по проекциям:
⎡
α1 · x11 + α2 · x12 + . . . + αn · x1n
⎢
⎢ α1 · x21 + α2 · x22 + . . . + αn · x2n
α1 x1 +α2 x2 +. . .+αn xn = ⎢
⎢
..............................
⎣
α1 · xn1 + α2 · xn2 + . . . + αn · xnn
(5.19)
⎤
⎡ ⎤
y1
⎥ ⎢ ⎥
⎥ ⎢ y2 ⎥
⎥ = ⎢ ⎥.
⎥ ⎢ ... ⎥
⎦ ⎣ ⎦
yn
(5.20)
Получена неоднородная система из n уравнений с n неизвестными.
Так как определитель этой системы отличен от нуля, то в силу теоремы
Крамера эта система имеет единственное решение.
Примечание. Формула (5.19) называется разложением вектора y
по базису xi (i = 1, 2, . . . , n).
Пример 5.4. Покажем, что векторы a = (1, 1, 4), b = (0, −3, 2) и
c = (2, 1, −1) образуют базис.
Составим определитель системы векторов и вычислим его:
1 0 2 1 −3 1 = 1 · (3 − 2) + 2 · (2 + 12) = 29.
(5.21)
4 2 −1 ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
237
Так как определитель системы не равен нулю, векторы a, b, c образуют базис.
Пример 5.5. Разложим вектор d = (6, 5, −14) по базису (a, b, c) (см.
предыдущий пример).
Представим вектор d в виде разложения:
d = α1 · a + α2 · b + α3 · c.
Имеем:
⎡ ⎤
⎡ ⎤
⎡ ⎤
1
0
2
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢
⎥
⎢ 5 ⎥ = α1 ⎢1⎥ + α2 ⎢−3⎥ + α3 ⎢ 1 ⎥ .
⎣ ⎦
⎣ ⎦
⎣ ⎦
⎣
⎦
4
−1
2
−14
⎡
(5.22)
⎤
6
(5.23)
Запишем это равенство в виде системы линейных уравнений:
⎧
⎪
+2α3 =
6,
⎪
⎨ α1
(5.24)
5,
α1 −3α2 +α3 =
⎪
⎪
⎩ 4α1 +2α2 −α3 = −14.
Полученная система имеет единственное решение α1 = −2, α2 =
= −1, α3 = 4. Таким образом, d = −2a − b + 4c.
5.3.
Евклидово векторное пространство
В произвольном n-мерном векторном пространстве существует возможность ввести скалярное произведение (или внутреннее произведение) — правило, согласно которому двум векторам a, b ∈ Rn ставится в соответствие число (a · b). Скалярное произведение позволяет
говорить о таких аналогах пространственного расположения многомерных векторов Rn , как ортогональность и коллинеарность.
По определению, скалярное произведение векторов a = (a1 , a2 , . . . , an )
и b = (b1 , b2 , . . . , bn ) вычисляется по формуле:
(a · b) = a1 b1 + a2 b2 + . . . + an bn .
(5.25)
Заметим, что с помощью знака суммы величина (a · b) записывается
n
ai b i .
компактным образом как (a · b) =
i=1
Перечислим свойства скалярного произведения.
Для произвольных a, a1 , a2 , b ∈ Rn и α ∈ R справедливы следующие
равенства:
238
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
1) (a · b) = (b · a) (симметричность);
2) ((a1 + a2 ) · b) = (a1 · b) + (a2 · b) (линейность);
3) (αa · b) = α(a · b) (линейность);
4) (a · a) 0, причем (a · a) = 0 ⇔ a = 0 (неотрицательность).
Примечание. Для скалярного произведения векторов a и b применяют также обозначения (a, b), a · b или ab.
Пример 5.6. Пусть n = 4, и в координатной записи векторы имеют
вид a = (10, −2, 1, 9), b = (0, 3, 4, −2), c = (−12, 2, −4, −5). Тогда
a · b = 10 · 0 + (−2) · 3 + 1 · 4 + 9 · (−2) = −20,
a · c = 10 · (−12) + (−2) · 2 + 1 · (−4) + 9 · (−5) = −173,
b · c = 0 · (−12) + 3 · 2 + 4 · (−4) + (−2) · (−5) = 0.
Пример 5.7. Покажем, что если условие (a · t) = (b · t) выполняется
для всех t ∈ Rn , то векторы a и b равны друг другу.
Доказательство. На основании свойства линейности представим равенство (a · t) = (b · t) в эквивалентном виде
(a · t) = (b · t) ⇔ ((a − b) · t) = 0.
(5.26)
В полученное равенство подставим t = a − b. Далее согласно свойству
неотрицательности имеем (a − b) = 0 или a = b, что и требовалось
доказать.
/
Длиной, или нормой, вектора называется величина a = (a · a).
Отметим следующие легко доказываемые свойства нормы, справедливые для произвольных векторов a и b евклидова пространства:
1) a 0, причем a = 0 ⇔ a = 0;
2) αa = abs(α) a для всех α ∈ R;
3) a + b a + b .
Последнее неравенство носит название неравенства треугольника, или неравенства Минковского2 .
Пример 5.8. Для векторов a = (0, −1, −1, 3, 1) и b = (5, −3, 0, −2, −1)
в пространстве R5 имеем:
/
/
√
a = (a · a) = 0 + (−1)2 + (−1)2 + 32 + 12 = 12;
/
/
√
b = (b · b) = (−5)2 + (−3)2 + 02 + (−2)2 + (−1)2 = 39.
2
Минковский (Hermann Minkowski) (1864–1909) — немецкий математик.
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
239
Ортогональными называются векторы, скалярное произведение которых равно нулю. Обычно для ортогональных векторов применяется
обозначение a ⊥ b.
Множество векторов, в котором все векторы попарно ортогональны,
естественно назвать ортогональным. Если в таком множестве все векторы имеют единичную норму, то такое множество — ортонормированное.
Конечно, в произвольном базисе векторы могут не обладать свойством попарной ортогональности и, тем более, ортонормированности.
Покажем, что существует возможность сконструировать новый базис на
основе исходного, причем в новом базисе все векторы будут попарно
ортогональны. Такая процедура называется ортогонализацией Грама3 – Шмидта4 .
Пусть в линейном евклидовом пространстве с нормой задан базис
(p1 , p2 , . . . , pn ). Процедура построения нового ортонормированного базиса заключается в выполнении следующих шагов.
Последовательно вычисляем векторы q 1 , q 2 , . . . , q n по формулам:
t1
,
t1
t2
t2 = p2 − (p2 , q 1 )q 1 , q 2 =
,
t2
t3
t3 = p3 − (p3 , q 1 )q 1 − (p3 , q 2 )q 2 , q 3 =
,
t3
...
tn
tn = pn − (pn , q 1 )q 1 − . . . − (pn , q n−1 )q n−1 , q n =
.
tn
t1 = p1 ,
q1 =
Полученный таким образом базис (q 1 , q 2 , . . . , q n ) является ортонормированным.
5.4.
Собственные значения и собственные
векторы матрицы
Две матрицы A и A , связанные соотношением
A = P −1 AP,
3
4
Грам (Jørgen Pedersen Gram) (1850–1916) — датский математик.
Шмидт (Erhardt Schmidt) (1876–1959) — немецкий математик.
(5.27)
240
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
где P — некоторая обратимая матрица, называются подобными. В таком случае применяют обозначение A ∼ A.
Примечание. Переход от матрицы A к A называют преобразованием подобия.
1 −3
−2 1
Пример 5.9. Матрицы
и
являются подобными,
−1 2
−9 5
поскольку выполняется равенство
−2 1
−9 5
1
=
1
−1
−2
1
−1
−1
−1 1
−1
−3
1
2
−1
−2
1
.
(5.28)
−1 −1
=
и равенство (5.28) легко про−2 −1
−2 1
веряется непосредственным перемножением матриц.
Теорема 5.4 (о свойствах подобия матриц). Выполняются следующие свойства подобия:
1) A ∼ A — рефлексивность;
2) A ∼ B ⇒ B ∼ A — симметричность;
3) (A ∼ B) и (B ∼ C ⇒ A) ∼ C — транзитивность.
Из теоремы о свойствах подобия следует, что подобие матриц является отношением эквивалентности [1, 62, 68].
Две подобные матрицы имеют равные определители. В самом деле,
из определения (5.27) следует, что
В самом деле,
|A | = |P −1 AP | = |P −1 | |A| |P | = |A|.
(5.29)
Заметим, что из равенства определителей вовсе не следует подобие
матриц.
Пример
являются ли подобными следующие матри
5.10.
Выясним,
0 1
1 0
цы:
и
.
1 0
1 1
Определители этих матриц равны −1 и 1 соответственно. Следовательно, эти матрицы не обладают свойством подобия.
Число λ и ненулевой вектор b называют собственным значением и
собственным вектором матрицы A соответственно, если выполняется
равенство
Ab = λb.
(5.30)
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
241
Вектор b рассматривается как вектор-столбец. Для нахождения b и
λ представим уравнение (5.30) в следующем виде:
(A − λI)b = 0,
(5.31)
где I — единичная матрица.
Мы получили однородную систему линейных уравнений. Чтобы оно
имело ненулевое решение, необходимо и достаточно равенство нулю определителю матрицы A−λI. Таким образом, чтобы найти λ, нужно решить
уравнение
|A − λI| = 0
(5.32)
или в развернутой записи
a − λ
a
.
.
.
a
11
12
1n
a21
a
−
λ
.
.
.
a
22
2n
. . . . . . . . . . . . . . . . . . . . . . . . . . . . = 0.
an1
an2
. . . ann − λ
(5.33)
Это уравнение называют характеристическим.
Если раскрыть определитель, то получится полином степени n относительно переменной λ:
p(λ) = (−λ)n + h1 (−λ)n−1 + . . . + hn−1 (−λ) + hn ,
(5.34)
причем выполняются следующие свойства:
• коэффициент h1 равен следу матрицы A: h1 = tr A = a11 + a22 +
+ . . . + ann ;
• свободный член hn совпадает с определителем: hn = det A.
Полином (5.34) также называют характеристическим.
Известно, что у подобных матриц характеристические полиномы совпадают.
Согласно основной теореме алгебры, характеристическое уравнение
(5.30) имеет не более n решений. Для каждого решения λ ему в соответствие ставится собственный вектор b.
Примечание. Хотя собственное значение может быть равным нулю,
собственный вектор по своему определению всегда отличен от нулевого
вектора.
242
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
Пример 5.11. Найдем собственные значения и собственные векторы
матрицы
⎡
⎤
1 1 3
⎢
⎥
⎥
A=⎢
(5.35)
⎣1 5 1⎦ .
3 1 1
Вычислим определитель матрицы A − λI и приравняем его к нулю:
1
3
1−λ
|A − λI| = 1
5−λ
1
3
1
1−λ
=
= (1 − λ) · [(5 − λ) · (1 − λ) − 1] − (1 − λ) + 3 + 3 · [1 − 3 · (5 − λ)] =
= (1 − λ) · (λ2 − 6 · λ + 3) + 9 · λ − 39 = −λ3 + 7 · λ2 − 36 =
= −(λ + 2) · (λ2 − 9 · λ + 18) = 0.
Решая это уравнение, получим три корня λ1 = −2, λ2 = 6, λ3 = 3.
Для каждого λ найдем соответствующий ему собственный вектор.
1. Пусть λ = −2. Тогда
⎡
⎤
3 1 3
⎢
⎥
⎥
(5.36)
A − λ1 I = ⎢
⎣1 7 1⎦ .
3 1 3
Считая, что b = (x, y, z), получим систему уравнений
⎧
⎪
⎪
⎨ 3x + y + 3z = 0,
x + 7y + z = 0,
⎪
⎪
⎩ 3x + y + 3z = 0.
Запишем матрицу, которая соответствует этой системе:
⎡
⎤
3 1 3
⎢
⎥
⎢1 7 1⎥ .
⎣
⎦
(5.37)
(5.38)
3 1 3
К третьей строке этой матрицы прибавим вторую, умноженную на
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
(−1):
⎡
243
⎤
3 1 3
⎢
⎥
⎢ 1 7 1⎥ .
⎣
⎦
0 0 0
(5.39)
Отбросим нулевую строку, поменяем местами вторую и первую строку. Тогда имеем:
1 7 1
.
(5.40)
3 1 3
Приведем матрицу к ступенчатому виду, прибавим ко второй строке
первую, умноженную на −3. Получаем:
1 7 1
.
(5.41)
0 −20 0
Перейдя к уравнениям, запишем:
x +7y +z = 0,
y
= 0,
(5.42)
или x + z = 0.
В качестве свободной переменной выберем z. Далее положим z = 1,
тогда x = −1.
Таким образом, b1 = (−1, 0, 1).
2. Для λ = 6 получаем систему:
⎧
⎪
⎪
⎨ −5x + y + 3z = 0,
(5.43)
x − y + z = 0,
⎪
⎪
⎩ 3x + y − 5z = 0.
Для нахождения вектора b2 запишем матрицу этой системы и ее преобразования:
⎡
⎤
⎡
⎤
⎡
⎤
−5 1 3
1 −1 1
1 −1 1
⎢
⎥
⎢
⎥
⎢
⎥
1
−1
1
⎢ 1 −1 1 ⎥ → ⎢−5 1 3 ⎥ → ⎢0 −4 8 ⎥ →
.
⎣
⎦
⎣
⎦
⎣
⎦
0 1 −2
3 1 −5
3 1 −5
0 4 −8
Перейдем к системе уравнений:
x − y = −z,
y = 2z.
(5.44)
244
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
Положив z = 1, находим y = 2 и x = 1.
Таким образом, b2 = (1, 2, 1).
3. Для λ = 3 имеем систему:
⎧
⎪
⎪
⎨ −2x + y + 3z = 0,
x + 2y + z = 0,
⎪
⎪
⎩ 3x + y − 2z = 0.
Для нахождения вектора b3 проводим
преобразования:
⎡
⎤
⎡
⎤
⎡
−2 1 3
1 2 1
1
⎢
⎥
⎢
⎥
⎢
⎢ 1 2 1 ⎥ → ⎢−2 1 3 ⎥ → ⎢0
⎣
⎦
⎣
⎦
⎣
3 1 −2
3 1 −2
0
(5.45)
аналогичные эквивалентные
⎤
⎥
1
2
1
5 5⎥
⎦→ 0 1 1 .
−5 −5
2
1
Переходим к системе уравнений:
x + 2y = −z,
y = −z.
(5.46)
Положив z = 1, находим y = −1, x = 1.
Таким образом, матрица A имеет следующие собственные значения
и соответствующие им собственные векторы:
λ1 = −2, b1 = (−1, 0, 1),
λ2 = 6, b2 = (1, 2, 1),
λ3 = 3, b3 = (1, −1, 1).
(5.47)
(5.48)
(5.49)
Примечание. Характеристическое уравнение в физике иногда называют вековым уравнением в связи с тем, что такого рода уравнения
возникли при анализе движений планет Солнечной системы и их спутников на значительных промежутках времени (как говорят, вековых движений) [33].
Аннулирующим полиномом для матрицы A называется такой полином p(x), значение которого от этой матрицы равно нулевой матрице:
p(A) = O.
Теорема 5.5 (теорема Кэли5 – Гамильтона6 ). Для любой квадратной матрицы A характеристический полином является ее аннулирующим полиномом.
5
6
Кэли (Arthur Cayley) (1821–1895) — английский математик.
Гамильтон (William Rowan Hamilton) (1805–1865) — ирландский математик и физик.
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
245
Пример 5.12. Проиллюстрируем теорему Кэли –Гамильтона
с помо1 −10
щью характеристического полинома матрицы A =
.
−6 5
1 − λ −10 Действительно, p(λ) = det |A − λI| = = λ2 − 6λ − 55.
−6 5 − λ
Проверим, что выполняется равенство p(A) = O:
p(A) =
=
1
−10
−6
61
5
−36
2
−60
85
−6
+
1
−10
−6
5
−6
60
36 −30
− 55
+
1 0
0 1
−55
0
0
−55
=
=
0 0
0 0
.
Значит, p(λ) является аннулирующим полиномом для матрицы A. Напомним, что подобные матрицы A и B связаны соотношением B =
= P −1 AP для некоторой невырожденной матрицы P . Выбирая P составленной из столбцов, равных собственным векторам A (записанным в произвольном порядке), получим диагональную матрицу B. В этом состоит
процедура диагонализации исходной матрицы.
Заметим, что достаточным условием возможности диагонализации
является наличие различных собственных значений исходной матрицы,
и их число должно совпадать с ее порядком.
Контрольные вопросы к главе «Векторные
пространства»
1. Дайте определение n-мерного арифметического вектора.
2. Перечислите основные операции над векторами.
3. Что такое n-мерное арифметическое пространство?
4. Как строится линейная комбинация системы векторов?
5. Какая система векторов называется линейно зависимой?
6. Дайте определение базиса векторного пространства.
7. Сформулируйте критерий того, что произвольная система векторов является базисом.
246
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
8. Расскажите, как в векторном пространстве можно ввести скалярное произведение векторов.
9. Перечислите основные свойства скалярного произведения.
10. Как найти норму вектора?
11. Для чего используют процедуру ортогонализации Грама – Шмидта?
12. Какие две матрицы называют подобными?
13. Перечислите свойства подобия матриц.
14. Дайте определение понятиям «собственный вектор» и «собственное
значение» матрицы.
15. Как, зная элементы матрицы, составить ее характеристическое
уравнение?
16. Сформулируйте теорему Кэли – Гамильтона.
17. В чем состоит достаточное условие диагонализации матрицы?
Задачи для самостоятельного решения
5.1. Выясните, образуют ли векторы p, q, r базис в трехмерном векторном пространстве. Если образуют, то разложите вектор x по этому
базису.
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
2
1
4
3
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
1) p = ⎢
⎣1⎦ , q = ⎣0⎦ , r = ⎣2⎦ , x = ⎣1⎦ .
0
1
1
3
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
1
13
5
2
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎥
⎢ ⎥
⎢ ⎥
2) p = ⎢
⎣1⎦ , q = ⎣−1⎦ , r = ⎣ 0 ⎦ , x = ⎣ 2 ⎦ .
−1
7
3
0
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
4
2
−1
−9
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢
⎥
⎢
⎥
⎢
⎥
⎢
3) p = ⎣1⎦ , q = ⎣ 0 ⎦ , r = ⎣ 2 ⎦ , x = ⎣ 5 ⎥
⎦.
1
−3
1
5
(5.50)
(5.51)
(5.52)
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
247
5.2. Векторы e1 , e2 , e3 , e4 заданы своими координатами в некотором
базисе. Покажите, что векторы e1 , e2 , e3 , e4 сами образуют базис
и найдите координаты вектора x в этом базисе:
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
⎡ ⎤
1
2
1
1
7
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢2⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎥ , e2 = ⎢ 3 ⎥ , e3 = ⎢2⎥ , e4 = ⎢ 3 ⎥ , x = ⎢ 14 ⎥ .
e1 = ⎢
⎢−1⎥
⎢0⎥
⎢1⎥
⎢−1⎥
⎢−1⎥
⎣ ⎦
⎣ ⎦
⎣ ⎦
⎣ ⎦
⎣ ⎦
0
−2
−1
4
2
(5.53)
5.3. Проверьте, что векторы a = (1, 2, 3), b = (−3, −2, 3), c = (0, −2, −2)
линейно независимы и таким образом образуют базис. Является ли
он ортогональным? Ортонормированным? Если ответы на эти вопросы отрицательные, то с помощью процедуры ортогонализации
Грама – Шмидта постройте ортонормированный базис.
5.4. Проверьте, что векторы a = (3, −1, 1, 2), b = (−3, 1, 0, −2), c =
= (0, −2, 2, −2), d = (1, 4, 2, −7) образуют базис в R4 . Является ли
он ортогональным? Ортонормированным? Если ответы на эти вопросы отрицательные, то с помощью процедуры ортогонализации
Грама – Шмидта постройте ортонормированный базис.
5.5. Докажите, что набор векторов {(i, 2 − i, 5), (1, 2 + i, −i), (1, i, −1)}
является базисом в линейном пространстве C3 . Чему равны координаты векторов (1, 0, 0), (1, 1, 0), (1, 1, 1) в этом базисе?
5.6. Пусть векторы v 1 = [a1 , a2 ]T и v 2 = [b1 , b2 ]T линейно независимы.
Что можно сказать о линейной зависимости или независимости векторов w1 = [a1 , b1 ]T и w2 = [a2 , b2 ]T ?
5.7. Докажите, что множество M = {Mpq } всех матриц с p строками и
q столбцами с вещественными элементами образует линейное пространство относительно операций сложения матриц и умножения
матрицы на число.
5.8. Докажите неравенство Коши7 – Буняковского8 (называемое
также неравенством Коши – Шварца9 ):
для произвольных векторов x, y ∈ Rn справедливо соотношение
(x · y)2 (x · x)(y · y),
7
(5.54)
Коши (Augustin-Louis Cauchy) (1789–1857) — французский математик и механик.
Виктор Яковлевич Буняковский (1804–1889) — русский математик и историк математики.
9
Шварц (Karl Hermann Amandus Schwarz) (1843–1921) — немецкий математик.
8
248
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
причем равенство имеет место тогда и только тогда, когда векторы
x и y отличаются скалярным множителем, т. е. пропорциональны.
5.9. Докажите теорему Пифагора10 :
Если векторы x, y ∈ Rn ортогональны, то имеет место равенство
(5.55)
x + y 2 = x 2 + y 2.
5.10. Проверьте справедливость тождества
x+y
2
+ x−y
2
2
≡ 2( x
+ y 2)
(5.56)
для произвольных элементов n-мерного векторного пространства
Rn . Каков геометрический смысл этого тождества в пространствах
R 2 и R3 ?
5.11. Известно, что выполняются равенства x
x − y = 12. Чему равна величина x ?
= 6, x + y
= 10,
5.12. Определите максимальное число линейно независимых векторов
1) на плоскости;
2) в трехмерном пространстве;
3) в Rn .
5.13. Проверьте, что система векторов
[1, 1, 1, . . . , 1]T , [0, 1, 1, . . . , 1]T , [0, 0, 1, . . . , 1]T , . . . , [0, 0, 0, . . . , 1]T
образует базис в Rn .
5.14. Является ли система векторов
[1, 1, 1, . . . , 1]T ,
[1, 22 , 32 , . . . , n2 ]T ,
[1, 2, 3, . . . , n]T ,
[1, 2
базисом в Rn ?
5.15. Покажите, что матрицы
0 0
a 0
и
0 a
0 0
n−1
,3
n−1
...,
, . . . , nn−1 ]T
, где a ∈ R, являются
подобными.
10
Пифагор Самосский (Pythagoras of Samos, Πυθαγόρας ὁ Σάμιος) (ок. 570 до н. э. — ок. 495 до
н. э.) — древнегреческий философ и математик.
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
249
5.16. Установите, являются ли матрицы A1 и A2 подобными:
1 −1
0 0
1) A1 =
и A2 =
;
0 0
1 1
⎡
⎤
⎡
⎤
1 0 0
1 0 1
⎢
⎥
⎢
⎥
⎢
⎥
⎢
2) A1 = ⎣0 1 0⎦ и A2 = ⎣1 0 0⎥
⎦.
0 0 0
0 1 0
5.17. Верно ли, что у подобных матриц след совпадает?
5.18. Найдите собственные значения и собственные векторы матрицы A.
⎡
⎤
⎡
⎤
4 −5 2
3 1 0
⎢
⎥
⎢
⎥
⎥ ; 2) A = ⎢−4 −1 0 ⎥ ;
1) A = ⎢
(5.57)
5
−7
3
⎣
⎦
⎣
⎦
6 −9 4
⎡
2
⎢
3) A = ⎢
⎣5
−1
−1
−3
0
−8 −2
4
⎤
⎡
2
⎤
0
1 0
⎥
⎢
⎥
⎢−4 4 0⎥ ;
;
4)
A
=
3⎥
⎦
⎣
⎦
−2
−2 1 2
⎡
1
−3 3
⎤
⎢
⎥
⎥.
5) A = ⎢
−2
−6
13
⎣
⎦
−1 −4 8
5.19. Приведите матрицу к диагональному виду:
⎡
⎤
4 15 −3
⎢
⎥
⎥.
A=⎢
8
−3
3
⎣
⎦
0 −15 7
5.20. Приведите следующие матрицы к диагональному виду:
1)
⎡
(5.58)
⎤
4
1
4
⎢
⎥
⎢
A=⎣ 6
3
6 ⎥
⎦;
−11 −5 −11
(5.59)
250
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
2)
⎡
−23 −16 −28
⎢
A=⎢
⎣ 58
⎤
⎥
64 ⎥
⎦.
−11 −7 −10
39
5.21. Приведите матрицу, зависящую от вещественного параметра a, к диагональному виду:
⎡
a
⎢
A=⎢
⎣−1
1
−1 −1
⎤
⎥
1⎥
⎦.
a
a
1
∗ 5.22. Запишите характеристическое уравнение для матрицы Ω размера
n × n:
⎡
⎤
0 1 0 ... 0 0
⎢
⎥
⎢ 0 0 1 . . . 0 0⎥
⎢
⎥
⎢
⎥
Ω = ⎢. . . . . . . . . . . . . . . .⎥ .
⎢
⎥
⎢ 0 0 0 . . . 0 1⎥
⎣
⎦
ω 0 0 ... 0 0
∗ 5.23. Используя теорему Кэли – Гамильтона, вычислите n-ю степень матрицы Ω, определенной в предыдущем упражнении.
∗ 5.24. Найдите значение предела:
lim
n→∞
1
ϕ/n
−ϕ/n
1
n
.
5.25. Приведите комплексную матрицу к диагональному виду:
⎡
⎤
1 − 2i 2i 2
⎢
⎥
Z=⎢
i 0⎥
⎣ 0
⎦.
i
−2 0
5.26. Известно, что два из трех собственных значений матрицы
⎡
⎤
910
1013 + 57i −1013 + 57i
⎢
⎥
⎢
Y = ⎣ 57 − 899i 68 − 1070i 57 + 1013i ⎥
⎦
−57 − 899i 57 − 1013i
Powered by TCPDF (www.tcpdf.org)
68 + 1070i
(5.60)
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
251
равны 11 + 57i и 11 − 57i. Не решая характеристическое уравнение,
найдите третье собственное значение.
5.27. Докажите, что собственные значения эрмитова оператора вещественны.
∗ 5.28. Докажите, что все собственные значения унитарной матрицы лежат в комплексной плоскости на единичной окружности с центром
в начале координат.
5.29. Вычислите собственные значения и собственные векторы матриц
Паули σ1 , σ2 , σ3 (см. с. 199).
Ответы и решения к главе «Векторные
пространства»
5.3. Решение.
Запишем матрицу A, составленную из координат векторов a, b и c:
⎡
⎤
1 −3 0
⎢
⎥
⎥
A=⎢
⎣2 −2 −2⎦ .
3 3 −2
Поскольку det A = 16 = 0, то векторы линейно независимы и образуют базис. Базис не является ортогональным, т. к., например,
(a · b) =
√
= 2 = 0, и не является ортонормированным, т. к. a = 14 = 1.
Для построения ортонормированного базиса применим алгоритм Грама – Шмидта:
⎡ ⎤
1
⎢ ⎥
1
t1
⎢
t1 = a = ⎣ 2 ⎥
⎦ , q 1 = t1 = √14 (1, 2, 3);
3
252
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
t2 = b − (b · q 1 )q 1 =
⎡ ⎤
⎡
⎤
⎡ ⎤
−3
−11
1
⎢ ⎥
⎢
⎥
⎥
1
1 ⎢
⎥
⎥
⎢ ⎥ 2⎢
=⎢
⎣−2⎦ − √14 (1 · (−3) + 2 · (−2) + 3 · 3) √14 ⎣2⎦ = 7 ⎣ −8 ⎦ ,
3
9
3
⎡
⎤
−11
⎥
1 ⎢
t2
⎢
⎥;
q2 =
=√
−8
⎦
t2
266 ⎣
9
t3 = c − (c · q 1 )q 1 − (c · q 2 )q 2 =
⎡ ⎤
⎡ ⎤
0
1
⎢ ⎥
⎥
1
1 ⎢
⎢
⎥
⎢
= ⎣−2⎦ − √ (0 · 1 − 2 · 2 − 2 · 3) √ ⎣2⎥
−
14
14 ⎦
−2
3
⎡ ⎤
⎡
⎤
3
−11
⎢ ⎥
⎥
1 ⎢
1
4
⎢ ⎥
⎢ −8 ⎥ =
(0 · (−11) − 2 · (−8) − 2 · 9) √
−√
⎦ 19 ⎣−3⎦ ;
266
266 ⎣
1
9
⎡ ⎤
3
⎥
t3
1 ⎢
⎢
q3 =
= √ ⎣−3⎥
⎦.
t3
19
1
В итоге получаем ортонормированный базис:
⎡ ⎤
⎡
⎤
⎡ ⎤
1
−11
3
⎥
⎢
⎥
⎢ ⎥
1 ⎢
1
1
⎢ −8 ⎥ , q 3 = √ ⎢−3⎥ .
q1 = √ ⎢
2⎥ , q 2 = √
⎦
14 ⎣ ⎦
266 ⎣
19 ⎣ ⎦
9
1
3
5.4. Решение.
Запишем матрицу A, составленную из координат заданных векторов:
⎡
⎤
3 −3 0 1
⎢
⎥
⎢−1 1 −2 4 ⎥
⎢
⎥.
A=⎢
⎥
1
0
2
2
⎣
⎦
2 −2 −2 −7
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
253
Ее определитель равен det A = −72 = 0.
Ясно, что rk A = 4, тогда по теореме о базисном миноре векторы
a = (3, −1, 1, 2), b = (−3, 1, 0, −2), c = (0, −2, 2, −2), d = (1, 4, 2, −7)
образуют базис в арифметическом пространстве R4 .
Этот базис не является ни ортогональным, ни ортонормированным,
т. к., например, (a · b) = −14 = 0 и (a · a) = 15 = 1.
Для построения ортонормированного базиса (q 1 , q 2 , q 3 , q 4 ) применим
алгоритм Грама – Шмидта:
1
t1
= √ (3, −1, 1, 2);
t1 = a = (3, −1, 1, 2), q 1 =
t1
15
⎡ ⎤
⎡t2 =⎤b − (b · q 1 )q 1 =
⎡ ⎤
−3
3
3
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢ ⎥
⎢−1⎥
⎢ ⎥
⎥ − √1 ((−3) · 3 + 1 · (−1) + 0 · 1 − 2 · 2) √1 ⎢−1⎥ = 1 ⎢ 1 ⎥,
=⎢
⎢ ⎥
⎢1⎥
⎥
15
15 ⎢
⎣ ⎦
⎣ 1 ⎦ 15 ⎣ 14 ⎦
−2
2
2
⎡ ⎤
−3
⎢ ⎥
⎥
1 ⎢
t2
⎢ 1 ⎥;
=√
q2 =
⎢
t2
210 ⎣ 14 ⎥
⎦
−2
⎡ ⎤
⎡ ⎤
⎡
⎤
0
−3
3
⎢ ⎥
⎢ ⎥
⎢
⎥
⎢−2⎥
⎢ 1 ⎥ 1 ⎢−15⎥
1
⎢ ⎥
⎢
⎥
⎥
t3 = c − (c · q 1 )q 1 − (c · q 2 )q 2 = ⎢
⎢ 2 ⎥ − 0 · q 1 − 7 ⎢ 14 ⎥ = 7 ⎢ 0 ⎥ ,
⎣ ⎦
⎣ ⎦
⎣
⎦
−2
−2
−12
⎡ ⎤
1
⎢ ⎥
1 ⎢−5⎥
t3
⎥;
=√ ⎢
q3 =
⎥
t3
42 ⎢
0
⎣ ⎦
4
q 2 )q⎤
q 3 )q⎤3 = ⎡ ⎤
2 − (d · ⎡
⎡t4 =⎤d − (d ·⎡q 1 )q⎤1 − (d · ⎡
1
−3
3
1
4
⎢ ⎥
⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢ ⎥
⎢ ⎥ ⎢ ⎥
⎢4⎥
⎥
⎥
43 ⎢
3 ⎢
⎢−5⎥
⎢ 1 ⎥ 13 ⎢−1⎥ ⎢ 4 ⎥
⎥
=⎢
⎢ 2 ⎥ − 124 ⎢ 0 ⎥ − 210 ⎢ 14 ⎥ + 15 ⎢ 1 ⎥ = ⎢ 0 ⎥,
⎣ ⎦
⎣ ⎦
⎣ ⎦ ⎣ ⎦
⎣ ⎦
−4
−2
2
−7
−4
254
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
⎡
1
⎤
⎢ ⎥
1⎥
1 ⎢
t4
⎥.
=√ ⎢
q4 =
⎥
t4
3⎢
0
⎣ ⎦
−1
В итоге, перечислим
векторы ортонормированного
базиса:
⎡ ⎤
⎡ ⎤
3
−3
⎢ ⎥
⎢ ⎥
⎢ ⎥
1 ⎢−1⎥
⎥ , q2 = √ 1 ⎢ 1 ⎥ ,
q1 = √ ⎢
⎢
⎥
⎥
15 ⎣ 1 ⎦
210 ⎢
⎣ 14 ⎦
2
−2
⎡ ⎤
⎡ ⎤
1
4
⎢ ⎥
⎢ ⎥
⎥
1 ⎢−5⎥
1 ⎢
⎢ 4 ⎥.
⎥ , q4 = √
q3 = √ ⎢
⎢
⎢
⎥
42 ⎣ 0 ⎦
4 3⎣ 0 ⎥
⎦
−4
−4
5.5. Решение.
Составим матрицу A из координат заданных векторов.
⎡
⎤
i
1
1
⎢
⎥
⎥.
A=⎢
2
−
i
2
+
i
i
⎣
⎦
−i
5
−1
Ее определитель det A = −8 − 6i = 0, следовательно, набор векторов
образует базис в пространстве C3 .
Найдем координаты векторов a = (1, 0, 0), b = (1, 1, 0), c = (1, 1, 1) в
этом базисе.
Вектор a в базисе (e1 , e2 , e3 ) имеет координаты (a1 , a2 , a3 ), удовлетворяющие системе уравнений, которая в матричной записи имеет вид:
⎡
⎤⎡ ⎤ ⎡ ⎤
1
i
1
1
a
⎢
⎥ ⎢ 1⎥ ⎢ ⎥
⎢2 − i 2 + i i ⎥ ⎢a2 ⎥ = ⎢0⎥ .
⎣
⎦⎣ ⎦ ⎣ ⎦
5
−i
−1
a3
0
Для решения полученной системы воспользуемся методом Крамера,
Δi
.
согласно которому для i ∈ {1, 2, 3} выполняются равенства ai =
Δ
Δ = −6 − 2i,
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
255
1
1 1
Δ1 = 0 2 + i i = −3 − i,
0 −i −1
1 1
i
Δ2 = 2 − i 0 i = 2 + 4i,
5 0 −1
1 1
i
Δ3 = 2 − i 2 + i 0 = −11 − 7i.
5
−i 0
Отсюда получаем следующие координаты:
−3 − i
1
1
a = (a1 , a2 , a3 ), где a1 =
=
(3 − i), a2 = − (4 + 2i),
−8 − 6i
10
10
1
a3 = (13 − i).
10
Запишем систему уравнений для координат второго вектора b:
⎡
⎤⎡ ⎤ ⎡ ⎤
1
i
1
1
b
⎢
⎥ ⎢ 1⎥ ⎢ ⎥
⎢2 − i 2 + i i ⎥ ⎢b2 ⎥ = ⎢1⎥.
⎣
⎦⎣ ⎦ ⎣ ⎦
0
−i −1 b3
1
1 1
Δ1 = 1 2 + i i = −2 − 2i,
0 −i −1
1 1
i
Δ2 = 2 − i 1 i = −3 + 3i,
5 0 −1
i
1
1
Δ3 = 2 − i 2 + i 1 = −7 − 7i.
5
−i 0
5
1
1
1
(7 + i), b2 = (3 − 21i), b3 = (49 + 7i).
25
50
50
Наконец, координаты вектора c удовлетворяют следующей системе
Значения координат: b1 =
256
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
уравнений в матричной форме:
⎡
⎤⎡ ⎤ ⎡ ⎤
1
i
1
1
a
⎢
⎥ ⎢ 1⎥ ⎢ ⎥
⎢2 − i 2 + i i ⎥ ⎢a2 ⎥ = ⎢1⎥ .
⎣
⎦⎣ ⎦ ⎣ ⎦
a3
1
5
−i −1
1
1 1
Δ1 = 1 2 + i i = −4 − 2i,
1 −i −1
1 1
i
Δ2 = 2 − i 1 i = 2i,
5 1 −1
1 1
i
Δ3 = 2 − i 2 + i 1 = −10 − 4i.
5
−i 1
1
1
Координаты вектора c равны: c1 =
(11 − 2i), c2 = − (3 + 4i),
25
25
1
c3 = (26 − 7i).
25
5.6. Решение.
Критерием, т. е. необходимым и достаточным условием линейной независимости системы векторов v 1 , v 2 является неравенство нулю определителя, составленного из их координат:
a b 1 1
= 0.
a2 b2 Как известно, транспонирование матрицы не меняет ее определителя.
Следовательно, имеет место неравенство
a a 1 2
= 0,
b1 b 2 и векторы w1 = [a1 , b1 ]T и w2 = [a2 , b2 ]T являются независимыми.
5.7. Доказательство.
Каждую матрицу из множества M можно представить как числовую
последовательности длины p × q. В самом деле, для этого достаточно
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
257
записать элементы матрицы построчно в вектор, или, другими словами,
в одномерный массив размера p × q. Поскольку векторы одного размера
образуют арифметическое пространство, то и множество M = {Mpq }
тоже образует линейное пространство относительно операций сложения
матриц и умножения матрицы на число.
5.8. Доказательство.
Введем в рассмотрение вектор z = x − λy, где λ — некоторое вещественное число.
На основании четвертого свойства скалярного произведения (z, z) 0, или
((x − λy) · (x − λy)) = (x · x) − 2λ(x · y) + λ2 (y · y) 0.
(5.61)
Это неравенство должно быть справедливым при любых λ ∈ R. Обратим внимание на то, что левая часть неравенства (5.61) представляет
собой квадратичный трехчлен. Необходимое и достаточное условие его
неотрицательности состоит в неположительности дискриминанта:
(x · y)2 − (x · x)(y · y) 0.
Полученное неравенство, как легко видеть, после переноса слагаемого
(x · x)(y · y) в правую часть совпадает с неравенством Коши – Буняковского.
Знак равенства будет иметь место в том и только том случае, если z ≡
≡ 0, т. е. x и y пропорциональны и отличаются скалярным множителем.
5.9. Доказательство.
Из определения длины вектора и свойств скалярного произведения
следуют равенства
x+y
2
= ((x+y)·(x+y)) = (x·x)+(x·y)+(y·x)+(y·y) = x 2 + y 2 .
Тем самым, теорема Пифагора доказана для всех ортогональных векторов x, y ∈ Rn .
5.10. Решение.
Преобразуя квадраты норм в левой части тождества, получим:
x+y
x−y
2
2
= ((x + y) · (x + y)) = x
= ((x − y) · (x − y)) = x
2
+ 2(x · y) + y 2 ,
2
− 2(x · y) + y 2 .
(5.62)
(5.63)
Из этих соотношений следует равенство (5.56). Геометрический смысл
этого равенства заключается в том, что сумма квадратов диагоналей
параллелограмма равна сумме квадратов сторон.
258
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
5.11. Решение.
Выразим величину y , воспользовавшись тождеством (5.56) из
предыдущего упражнения:
/
y = ( x + y 2 + x − y 2 )/2 − x 2 .
/
Подставив
числовые
данные,
получим:
y
=
(100 + 144)/2 − 36 =
√
= 86.
5.12. Ответ:
1) максимальное число линейно независимых векторов равно 2;
2) 3;
3) n.
5.13. Решение.
Матрица
системы векторов имеет нижний треуголь⎡ рассматриваемой
⎤
1 0 ... 0 0
⎢
⎥
⎢1 1 . . . 0 0 ⎥
⎢
⎥
⎢
⎥
ный вид: ⎢. . . . . . . . . . . . .⎥
⎢
⎥
⎢1 1 . . . 1 0 ⎥
⎣
⎦
1 1 ... 1 1
Ее определитель равен произведению элементов, расположенных на
главной диагонали. Следовательно, векторы линейно независимы и образуют базис в линейном пространстве Rn .
5.14. Ответ: является. Это легко видеть из неравенства нулю определителя Вандермонда в этом случае (см. (2.74) на с. 86).
5.15. Решение.
Легко проверить, что выполняется равенство:
0
0
0 a
P,
= P −1
a 0
0 0
0 1
где P =
. Следовательно, по определению отношения подобия (5.27),
1 0
приведенные в условии задачи матрицы являются подобными.
5.16. Ответ:
1) да, A2 =
0
1
−1 0
−1
A1
0
1
−1 0
;
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
259
2) нет, поскольку не выполняется равенство определителей этих матриц.
5.17. Решение.
Да, как следует из упр. 1.44, для любых матриц A и обратимой P
выполняется равенство
tr (P −1 AP ) = tr (AP −1 P ) = tr A.
5.18. Решение.
1) Как известно, собственным вектором матрицы A называется такой
вектор u, что при умножении A на u в результате получается вектор λu,
где λ ∈ R — собственное значение.
Запишем уравнение вида Au = λu:
⎡ ⎤
⎡
⎤⎡ ⎤
u
4 −5 2
u1
⎢ 1⎥
⎢
⎥⎢ ⎥
⎢5 −7 3⎥ ⎢u2 ⎥ = λ ⎢u2 ⎥ ,
⎣ ⎦
⎣
⎦⎣ ⎦
6 −9 4
u3
u3
или⎧в координатах вектора u:
⎪
⎨4u1 − 5u2 + 2u3 = λu1 ,
5u1 − 7u2 + 3u3 = λu2 ,
⎪
⎩6u − 9u + 4u = λu ,
2
3
3
⎧ 1
⎪
(4
−
λ)u
−
5u
+
2u
1
2
3 = 0,
⎨
5u1 − (7 + λ)u2 + 3u3 = 0,
⎪
⎩
6u1 − 9u2 + (4 − λ)u3 = 0.
Заметим, что собственный вектор по определению не может быть нулевым:
⎡ ⎤ ⎡ ⎤
0
u
⎢ 1⎥ ⎢ ⎥
⎢u2 ⎥ = ⎢0⎥ .
⎣ ⎦ ⎣ ⎦
u3
0
Следовательно, уравнения линейно зависимы и определитель матрицы системы равен нулю:
2u3 5u2
(4 − λ)
5u1
−(7 + λ)u2
3u3 = 0.
6u1
−9u2
(4 − λ)u3 Вычислив определитель, получаем характеристическое уравнение:
2
λ − λ3 = 0.
260
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
Собственные значения: λ1,2 = 0, λ3 = 1, причем нуль является собственным значением кратности два.
Найдем соответствующие собственные векторы:
Пусть
λ = 0.
⎧
⎪
⎨4u1 − 5u2 + 2u3 = 0,
5u1 − 7u2 + 3u3 = 0,
⎪
⎩
6u1 − 9u2 + 4u3 = 0.
Решив эту систему, получим: ⎡ ⎤ ⎡ ⎤
u
u
⎢ 1⎥ ⎢ 1 ⎥
⎥
⎢
⎢
u1 = 0, u2 = 2u1 , u3 = 3u1 , или ⎣u2 ⎦ = ⎣2u1 ⎥
⎦, u1 ∈ R.
⎡ ⎤
1
⎢ ⎥
⎢
Собственный вектор: ⎣2⎥
⎦.
3
Пусть
λ = 1.
⎧
⎪
⎨3u1 − 5u2 + 2u3 = 0,
5u1 − 8u2 + 3u3 = 0,
⎪
⎩
6u1 − 9u2 + 3u3 = 0.
Решив эту систему, получим:
u3
3u1
⎡ ⎤ ⎡ ⎤
u
u
⎢ 1⎥ ⎢ 2⎥
⎢
⎥
⎢
u1 = u2 , 0u2 = 0u2 , u3 = u2 , или ⎣u2 ⎦ = ⎣u2 ⎥
⎦, u2 ∈ R. Собственный
u3
u2
⎡ ⎤
1
⎢ ⎥
⎥
вектор: ⎢
⎣1⎦.
1
2) По аналогии с решением предыдущего пункта запишем уравнение
вида Au = λu. Затем получим характеристическое уравнение:
−(λ + 2)(λ − 1)2 = 0.
Собственные значения равны: λ1 = −2, λ2,3 = 1.
Найдем собственные векторы.
Для
⎧ λ = −2:
⎪
⎨5u1 + u2 = 0,
−4u1 + u2 = 0,
⎪
⎩
4u1 − 8u2 = 0,
u1 = 0, u2 = 0, u3 ∈ R.
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
⎡ ⎤
0
⎢ ⎥
⎢
Собственный вектор: ⎣0⎥
⎦.
1
Для λ2,3 = 1:
⎧
⎪
⎨2u1 + u2 = 0,
−4u1 − 2u2 = 0,
⎪
⎩
4u1 − 8u2 − 3u3 = 0,
20
u2 = −2u1 , u3 = u1 ,
⎤ 3
⎡ ⎤ ⎡
u
1
u
⎥
⎢ 1⎥ ⎢
⎢u2 ⎥ = ⎢−2u1 ⎥, u1 ∈ R.
⎦
⎣ ⎦ ⎣
20
u3
u1
3
⎡ ⎤
3
⎢ ⎥
⎥
Собственный вектор: ⎢
⎣−6⎦.
20
3) Характеристическое уравнение: −λ3 − 3λ2 − 3λ − 1 = 0.
Собственное
значение имеет кратность, равную трем: λ = −1.
⎧
⎪3u1 − u2 + 2u3 = 0,
⎨
5u1 − 2u2 + 3u3 = 0,
⎪
⎩
−u1 − u3 = 0.
Найдем нетривиальное
u1 = −u3 , u2 = −u3 .
⎡ решение:
⎤
−1
⎢ ⎥
⎢
Собственный вектор: ⎣−1⎥
⎦.
1
4) Характеристическое уравнение имеет вид: −(λ − 2)3 = 0.
Собственное значение: λ = 2.
Найдем
собственный вектор для λ = 2:
⎧
⎪−2u1 + u2 = 0,
⎨
−4u1 + 2u2 = 0,
⎪
⎩
−2u1 + u2 = 0,
тогда u = c1 [1/2, 1, 0]T + c2 [0, 0, 1]T .
Собственные векторы: [1, 2, 0]T , [0, 0, 1]T .
5) Характеристическое уравнение: −λ3 + 3λ2 − 3λ + 1 = 0.
Собственное значение λ = 1 имеет кратность, равную трем.
261
262
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
⎧
⎪
⎨−3u2 + 3u3 = 0,
−2u1 − 7u2 + 13u3 = 0,
⎪
⎩
−u1 − 4u2 + 7u3 = 0,
следовательно,
u2 = u3 , u1 = 3u3 .
⎡ ⎤
3u
⎢ 3⎥
⎢ u3 ⎥, u3 ∈ R.
⎣ ⎦
u3
⎡ ⎤
3
⎢ ⎥
⎢
Собственный вектор: ⎣1⎥
⎦.
1
5.19. Решение.
Составим характеристическое уравнение:
⎡
4−λ
15
−3
⎢
⎢
det ⎣ 8
−3 − λ
3
0
−15
7−λ
⎤
⎥
⎥ = 0.
⎦
Найдем характеристический полином, выполняя разложение определителя по первому столбцу:
p(λ) = (4 − λ)((−3 − λ)(7 − λ) + 45) − 8(15(7 − λ) − 45),
p(λ) = λ3 − 8λ2 − 80λ + 384.
Найдем собственные значения: λ1 = 12, λ2 = −8, λ3 = 4.
Составим собственные
векторы.
⎧
⎪
⎨−8x1 + 15x2 − 3x3 = 0,
⇒ a1 = c(3, 1, −3).
1) Для λ1 : 8x1 − 15x2 + 3x3 = 0,
⎪
⎩
−15x2 − 5x3 = 0
2)
⎧ Для λ2 :
⎪
⎨12x1 + 15x2 − 3x3 = 0,
⇒ a2 = c(−1, 1, 1).
8x1 + 5x2 + 3x3 = 0,
⎪
⎩
−15x2 + 15x3 = 0
3)
⎧ Для λ3 :
⎪
⎨15x2 − 3x3 = 0,
8x1 − 7x2 + 3x3 = 0, ⇒ a3 = c(−1, 1, 5).
⎪
⎩
−15x2 + 3x3 = 0
Запишем матрицу перехода и обратную к ней:
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
⎡
3
−1 −1
⎤
⎡
263
⎤
1
1
0
⎢
⎥
⎢
⎥
⎥, P −1 = 1 ⎢−2 3 −1⎥.
P =⎢
1
1
1
⎦
⎣
⎦
4⎣
1 0 1
−3 1 5
В итоге, диагонализованная матрица равна
⎡
⎤
⎡
⎤
12 0 0
−3 −1 −1
⎢
⎥
⎢
⎥
⎥
⎢
⎥
B = P −1 AP = ⎢
⎣ 0 −8 0⎦ , где P = ⎣−1 1 1 ⎦ .
0 0 4
3 1 5
5.20. Решение.
Характеристическое уравнение имеет вид:
⎡
⎤
4−λ
1
4
⎢
⎥
⎥ = 0.
|A − λI| = ⎢
3−λ
6
⎣ 6
⎦
−11 −5 −11 − λ
Вычислим характеристический полином:
p(λ) = (4 − λ)((3 − λ)(−11 − λ) + 30) − (6(−11 − λ) + 30) +
+ 4(−30 − (3 − λ) · (−11)),
p(λ) = −λ3 − 4λ2 − 3λ.
Собственные значения: λ1 = −3, λ2 = −1, λ3 = 0.
Составим собственные векторы.
Для
⎧ λ1 :
⎪
⎨7x1 + x2 + 4x3 = 0,
⇒ a1 = c(1, 1, −2).
6x1 + 6x2 + 6x3 = 0,
⎪
⎩
−11x1 − 5x2 − 8x3 = 0
Для
⎧ λ2 :
⎪
⎨5x1 + x2 + 4x3 = 0,
⇒ a2 = c(5, 3, −7).
6x1 + 4x2 + 6x3 = 0,
⎪
⎩
−11x1 − 5x2 − 10x3 = 0
⎧
⎪
⎨4x1 + x2 + 4x3 = 0,
Для λ3 : 6x1 + 3x2 + 6x3 = 0,
⇒ a3 = c(−1, 0, 1).
⎪
⎩
−11x1 − 5x2 − 11x3 = 0
⎡
⎤
1 5 −1
⎢
⎥
⎢
Матрица перехода P = ⎣ 1 3 0 ⎥
⎦,
−2 −7
1
264
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
⎡
−3 −2 −3
⎢
обратная к ней матрица имеет вид P −1 = ⎢
⎣1
1
Диагонализованная матрица:
⎡
−3
⎢
B = P −1 AP = ⎢
⎣0
0
1
3
⎤
⎥
1⎥
⎦.
2
⎤
⎡
⎤
0
1 5 −1
⎥
⎢
⎥
⎢
⎥
−1 0⎥
⎦ , где P = ⎣ 1 3 0 ⎦ .
0 0
−2 −7 1
0
2) Запишем характеристическое уравнение:
⎡
⎤
−23 − λ −16
−28
⎢
⎥
⎥ = 0,
A − λI = ⎢
58
39
−
λ
64
⎣
⎦
−11
−7 −10 − λ
p(λ) = (−23 − λ)((39 − λ)(−10 − λ) + 64 · 7) + 16(58(−10 − λ) +
+ 11 · 64) − 28(−7 · 58 + 11(39 − λ)),
p(λ) = −λ3 + 6λ2 − 11λ + 6.
Собственные значения: λ1 = 3, λ2 = 2, λ3 = 1.
Составим собственные векторы.
Для
⎧ λ1 :
⎪
⎨−26x1 − 16x2 − 28x3 = 0,
⇒ a1 = c(2, −5, 1).
58x1 + 36x2 + 64x3 = 0,
⎪
⎩
−11x1 − 7x2 − 13x3 = 0
Для
⎧ λ2 :
⎪
⎨−25x1 − 16x2 − 28x3 = 0,
⇒ a2 = c(4, −8, 1).
58x1 + 37x2 + 64x3 = 0,
⎪
⎩
−11x1 − 7x2 − 12x3 = 0
Для λ3 :
⎧
⎪
⎨−24x1 − 16x2 − 28x3 = 0,
⇒ a3 = c(5, −11, 2).
58x1 + 38x2 + 64x3 = 0,
⎪
⎩−11x − 7x − 11x = 0
1
2
3
⎡
⎤
2 4
5
⎢
⎥
⎢
Матрица перехода P = ⎣−5 −8 −11⎥
⎦,
1
1
2
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
⎡
−5 −3 −4
265
⎤
⎢
⎥
⎥.
обратная к ней матрица P −1 = ⎢
−1
−1
−3
⎣
⎦
3 2 4
Запишем диагонализованную матрицу:
⎡
⎤
⎡
⎤
3 0 0
2 4
5
⎢
⎥
⎢
⎥
⎥ , где P = ⎢−5 −8 −11⎥ .
B = P −1 AP = ⎢
0
2
0
⎣
⎦
⎣
⎦
0 0 1
1 1
2
5.21. Ответ:
Характеристический полином имеет вид p(λ) = λ3 − 3aλ2 + 3a2 λ −
−λ + (a − a3 ), его корни равны λ1 = a − 1, λ2 = a, λ3 = a + 1.
Диагонализованная матрица равна
⎡
⎤
⎡
⎤
a+1 0
0
−1 1 0
⎢
⎥
⎢
⎥
⎢
⎥
B = P −1 AP = ⎢
a
0 ⎥
⎣ 0
⎦ , где P = ⎣ 1 −1 −1⎦ .
0
0 a−1
0
1
1
5.22. Решение.
Левую часть характеристического уравнения det(Ω − λI) = 0 запишем, разложив определитель по первому столбцу:
0 −λ 1 0 . . . 0
0 −λ 1 . . . 0
0 det(Ω − λI) = . . . . . . . . . . . . . . . . . . . . . . . . =
0
0
0
.
.
.
−λ
1
ω
0 0 . . . 0 −λ
1 0 . . . 0 0
−λ 1 0 . . . 0 −λ 1 . . . 0 0
0 −λ 1 . . . 0 = . . . . . . . . . . . . . . . . . . . − (−1)n . . . . . . . . . . . . . . . . . =
0 0 . . . 1 0
0
0
0
.
.
.
1
0 0 . . . −λ 1
ω
0 0 . . . −λ
= − λ(−λ)n−1 − (−1)n ω = (−λ)n − (−1)n ω.
В итоге, характеристическое уравнение для матрицы Ω имеет вид
(−1)n (λn − ω) = 0 или (λn − ω) = 0.
266
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
5.23. Решение.
Согласно теореме Кэли – Гамильтона, при подстановке матрицы в ее
характеристическое уравнение получается тождество. Как показано в
упр. 5.22, характеристическое уравнение для Ω имеет вид (λn − ω) = 0.
Значит, справедливо равенство
Ωn − ωI = O, или Ωn = ωI,
где, как обычно, O — нулевая матрица размера n × n, I — единичная
матрица того же размера.
5.24. Решение. Обозначим A =
1
ϕ/n
.
−ϕ/n 1
Собственные значения этой матрицы равны λ1,2 = 1 ± iϕ/n, соответствующие им собственные векторы равны [1, i]T и [1, −i]T .
Вычислим степень An , предварительно приведя матрицу к диагональному виду A :
−1 1
ϕ/n
1
1
1
1
1
+
iϕ/n
0
A =
=
,
i −i
−ϕ/n 1
i −i
0
1 − ϕ/n
следовательно, по теореме о степени матрицы специального вида на с. 75
1
1
1
1
=
(A )n
An =
i −i
i −i
−1
−1 0
(1 + iϕ/n)n
1 1
1 1
.
=
0
(1 − ϕ/n)n i −i
i −i
После несложных вычислений получим
n
n
n
n
+
(1
−
ia/n)
i(−(1
+
ia/n)
+
(1
−
ia/n)
)
(1
+
ia/n)
1
.
An =
2 i((1 + ia/n)n − (1 − ia/n)n )
(1 + ia/n)n + (1 − ia/n)n
Пользуясь известным из математического анализа соотношением [80]
lim (1 + t/n)n = et ,
n→∞
справедливым для всех t ∈ C, выполняем предельный переход:
ia/n
−ia/n
ia/n
−ia/n
+
e
e
−
e
e
1
lim An =
.
n→∞
2 e−ia/n − eia/n eia/n + e−ia/n
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
267
Представляя экспоненту от мнимого числа по формуле Эйлера cos z+
+i sin z = eiz , приходим к окончательному ответу:
n 1
ϕ/n
cos ϕ sin ϕ
lim
=
.
n→∞ −ϕ/n
1
− sin ϕ cos ϕ
5.25. Ответ:
⎡
−2i 0 0
⎢
Z = P −1 ZP = ⎢
⎣ 0
0
⎤
⎡
−2 −2i −i
⎥
⎢
⎢0
,
где
P
=
i 0⎥
⎦
⎣
0 1
1
1−i
2
⎤
⎥
0⎥
⎦.
1
5.26. Решение.
Как известно, у подобных матриц следы совпадают (см. упр. 5.17).
Следовательно, сумма собственных значений матрицы равна следу этой
матрицы:
tr Y = λ1 + λ2 + λ3 =
3
yii = 910 + (68 − 1070i) + (68 + 1070i) = 1046.
i=1
Третье собственное значение равно
λ3 = 1046 − (λ1 + λ2 ) = 1046 − ((11 + 57i) + (11 − 57i)) = 1024.
5.27. Доказательство.
Пусть A — произвольная эрмитова матрица размера n × n, имеющая
собственный вектор b, которому отвечает собственное значение λ0 . Это
означает, что выполняется равенство
Ab = λ0 b.
(5.64)
Рассмотрим выражение bH Ab. Оно равно вещественному числу, т. к.
по теореме об эрмитовом сопряжении произведения на с. 195
(bH Ab)H = bH AH (bH )H = bH Ab.
(5.65)
Согласно (5.64), выполняется равенство
bH Ab = λ0 bH b = λ0 (|b1 |2 + |b2 |2 + . . . + |bn |2 ),
где b1 , b2 , . . . , bn — компоненты вектора b.
(5.66)
268
ГЛАВА 5. ВЕКТОРНЫЕ ПРОСТРАНСТВА
Сравнивая (5.65) и (5.66), получаем, что λ0 ∈ R.
5.28. Доказательство.
Пусть U — произвольная унитарная матрица, имеющая собственный
вектор b, которому отвечает собственное значение λ0 . Это означает, что
выполняется равенство
(5.67)
U b = λ0 b.
Рассмотрим выражение (U b)H (U b). В силу (5.67) это выражение можно представить в виде:
(U b)H (U b) = (λ0 b)H (λ0 b) = (λ∗0 bH )(λ0 b) = λ∗0 λ0 bH b = |λ0 |2 bH b. (5.68)
Заметим, что в преобразованиях было использовано свойство 3) операции эрмитового сопряжения (см. с. 195).
С другой стороны, опираясь на теорему об эрмитовом сопряжении
произведения на с. 195 и на свойство унитарности U H U = I, получим:
(U b)H (U b) = (bH U H )(U b) = bH (U H U )b = bH Ib = bH b.
(5.69)
Сравнивая (5.68) и (5.69), приходим к выводу: |λ0 |2 = 1.
Следовательно, комплексное число λ0 расположено на комплексной
плоскости на расстоянии ρ = 1 от начала координат. Геометрическое место всех таких точек λ0 есть окружность единичного радиуса с центром
в начале координат, что и требовалось доказать.
5.29. Ответ:
для σ1 : λ1,2
для σ2 : λ1,2
для σ3 : λ1,2
1
1
= ±1, собственные векторы b1,2 = √
;
2 ±1
1
1
= ±1, собственные векторы b1,2 = √
;
2 ±i
1
0
= ±1, собственные векторы b1 =
и b2 =
.
0
1
Глава 6
Векторы в трехмерном
пространстве
−→
Геометрическим вектором называется направленный отрезок AB
с началом в точке A и концом в точке B. В дальнейшем слово «геометрический» в этом определении будем для краткости опускать.
Нулевым называют вектор, начало и конец которого совпадают.
−→
Длину отрезка AB называют длиной, или модулем, вектора AB и
−→
обозначают |AB|.
Векторы, лежащие на параллельных прямых, называют коллинеарными.
Единичным называют вектор, модуль которого равен единице.
Вектор b называют произведением числа α, α = 0, на вектор a, если
выполняются условия:
1) |b| = abs(α)|a|;
2) направление векторов a и b совпадает, если α > 0, и эти векторы
противоположно направлены, если α < 0.
Произведение 0 на a равно по определению нулевому вектору.
−→ −−→
Два вектора AB и CD считают равными, если они коллинеарны,
имеют одинаковые модули и направлены в одну сторону.
Вектор
−→
AB
(6.1)
ε = −→
|AB|
−→
называется ортом вектора AB. Это единичный вектор, по направлению
−→
совпадающий с вектором AB.
При определении суммы векторов следует использовать правило параллелограмма (рис. 6.1).
Пусть в пространстве заданы прямая L и точка A. Проведем через
270
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
a
c=a+b
b
Рис. 6.1. Определение вектора c как суммы векторов a и b (правило
параллелограмма)
точку A плоскость π, ортогональную прямой L. Точка пересечения плоскости π и прямой L называется проекцией точки A на прямую L.
−→
Рассмотрим вектор AB и прямую L в пространстве. Пусть A и B есть проекции точек A и B на прямую L соответственно. Тогда век−−→
−→
тор A B называют проекцией вектора AB на прямую L и обозначают
−→
PrL AB.
−→
−→
Числовая проекция вектора AB на прямую L равна модулю |AB|,
−→
умноженному на косинус угла α между вектором AB и прямой L, т. е.
−→
−→
PrL AB = |AB| cos α.
Числовые проекции векторов обладают следующими свойствами:
6.1.
PrL (a + b) = PrL a + PrL b;
(6.2)
PrL (αa) = αPrL a.
(6.3)
Декартова система координат
Декартовой1 системой координат называют систему, состоящую из
начальной точки O, трех взаимно перпендикулярных осей Ox, Oy, Oz,
которые пересекаются в точке O, и масштабного единичного отрезка.
−→
Пусть A — произвольная точка в пространстве. Вектор OA называют
−→
радиус-вектором точки A. Числовую проекцию вектора OA на ось
Ox обозначают через x и называют абсциссой, на ось Oy — через y и
1
Декарт (René Descartes) (1596–1650) — французский философ, математик, физик, физиолог.
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
271
z
A
k
O
j
y
i
x
Рис. 6.2. Декартова система координат
называют ординатой и на ось Oz — через z и называют аппликатой
точки A [46, 8].
У равных векторов соответствующие координаты совпадают.
Вещественные числа x, y, z являются координатами точки A и радиус−→
−→
вектора OA, что можно записать как A(x, y, z) и OA = (x, y, z).
Ортами (базисными векторами) декартовой системы координат
называют единичные векторы i, j, k (см. рис. 6.2). В координатном
представлении они имеют следующий вид: i = (1, 0, 0), j = (0, 1, 0) и
k = (0, 0, 1).
−→
Произвольный вектор AB = (x, y, z) можно представить в виде разложения по базису декартовой системы координат:
−→
AB = xi + yj + zk.
(6.4)
Линейные операции над векторами, т. е. сложение векторов и умножение вектора на число производятся, как говорят, покомпонентно или
покоординатно. Это означает, что если a = (ax , ay , az ), b = (bx , by , bz ) и
c ∈ R, то
a + b = (ax + bx , ay + by , az + bz ),
ca = (cax , cay , caz ).
(6.5)
С помощью ортов системы координат полученные равенства можно записать как
a+b = (ax +bx )i+(ay +by )j +(az +bz )k,
ca = cax i+cay j +caz k. (6.6)
Проиллюстрируем использование введенных определений на следующем примере.
272
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
Пример 6.1. Для векторов v 1 = (−2, −1, 7), v 2 = (0, 4, −6) и скаляра
t = 3 имеем:
v 1 + v 2 = (−2 + 0, −1 + 4, 7 + (−6)) = (−2, 3, 1) = −2i + 3j + k,
tv 1 = (3 · (−2), 3 · (−1), 3 · 7) = (−6, −3, 21) = −6i − 3j + 21k.
6.2.
Скалярное произведение векторов
Напомним (см. с. 237), что скалярное произведение двух векторов
a = (xa , ya , za ) и b = (xb , yb , zb ) обозначается как a · b и определяется
через их координаты следующим образом:
a · b = x a x b + ya y b + z a z b .
(6.7)
Нетрудно проверить, что для скалярных произведений базисных векторов справедлива серия равенств:
i · j = i · k = j · k = 0 и i · i = j · j = k · k = 1.
(6.8)
Теорема 6.1. Скалярное произведение двух векторов a и b равно
произведению модулей этих векторов на косинус угла α между ними.
Понятия проекции вектора на прямую и скалярного произведения
векторов тесно связаны. В самом деле, поскольку, с одной стороны, проекция вектора a на прямую, содержащую вектор b, равна Prb a = |a|cos α,
с другой стороны, Pra b = |b| cos α, то можно записать:
a · b = |a||b| cos α = |a| Pra b = |b| Prb a.
(6.9)
Если a · b = 0, но a = 0 и b = 0, то такие векторы называют ортогональными, так как угол между ними равен π/2. Напомним (см. с. 239),
что для обозначения ортогональности векторов применяют запись вида
a ⊥ b.
Пример 6.2. Вычислим скалярное произведение векторов a = (3, 2, 1)
и b = (0, 2, 1).
Решение.
a · b = 3 · 0 + 2 · 2 + 1 · 1 = 5.
Длина |a| вектора a = (xa , ya , za ) вычисляется по формуле
/
|a| = x2a + ya2 + za2 .
(6.10)
(6.11)
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
273
Пример 6.3. Определим длину
/ вектора a = (5, −3, −1).
√
2 + (−3)2 + (−1)2 =
Решение.
Длина
|a|
равна
5
25 + 9 + 1 =
√
= 35.
Расстояние между точками A(xa , ya , za ) и B(xb , yb , zb ) вычисляется по
формуле:
/
(6.12)
AB = (xa − xb )2 + (ya − yb )2 + (za − zb )2 .
Пример 6.4. Найдем расстояние между точками A(5, 3, 2) и B(0, 3, 2).
Решение.
/
(6.13)
AB = (5 − 0)2 + (3 − 3)2 + (2 − 2)2 = 5.
Определим угол между двумя произвольными векторами трехмерного векторного пространства.
Пусть даны векторы a = (xa , ya , za ) и b = (xb , yb , zb ). Представим скалярное произведение a · b двумя способами, а именно, по формулам (6.7)
и (6.9):
(6.14)
a · b = x a x b + ya y b + z a z b ,
a · b = |a||b| cos α.
(6.15)
Отсюда можно сделать вывод, что косинус угла α равен
xa x b + y a y b + z a z b
/
.
cos α = /
2
xa + ya2 + za2 x2b + yb2 + zb2
(6.16)
Ясно, что
&
α = arccos /
'
xa x b + y a y b + z a z b
/
.
x2a + ya2 + za2 x2b + yb2 + zb2
(6.17)
Пример 6.5. Найдем угол между векторами a = (1, 2, 3) и b = (0, 2, 1).
Решение. Используя формулу (6.17), получим:
& 1·0+2·2+3·1 '
7
√
= arccos √ .
(6.18)
α = arccos √
1+4+9· 0+4+1
70
Пример 6.6. Пусть даны два вектора: a = (5, 4, 1) и b = (2, −2, −2).
Являются ли эти векторы коллинеарными или взаимноортогональными?
Решение.
Если векторы коллинеарны, то существует такое вещественное число
λ, что выполняется условие a = λb. Отсюда следует:
ya
za
xa
=
= .
(6.19)
xb
yb
zb
274
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
5
4
1
=
, то векторы a и b
Но так как имеют место неравенства =
2
−2
−2
неколлинеарны.
Для проверки взаимной ортогональности векторов найдем скалярное
произведение a · b:
a · b = 5 · 2 − 4 · 2 − 1 · 2 = 0.
(6.20)
Значит, векторы a и b взаимноортогональны.
6.3.
Векторное произведение векторов
Векторным произведением двух векторов, заданных в декартовой системе координат как a = (xa , ya , za ) и b = (xb , yb , zb ), называется
вектор, обозначаемый a × b или [a, b] и определяемый согласно правилу:
i j k
a×b = xa ya za = (ya ·zb −za ·yb )i+(za ·xb −xa ·zb )j +(xa ·yb −xb ·ya )k.
xb yb z b (6.21)
6.3.1.
Свойства векторного произведения
Для произвольных векторов трехмерного линейного пространства R3
выполняются следующие свойства.
Свойство 1.
|a × b| = |a||b| sin α,
(6.22)
где α — угол между a и b.
Доказательство. Докажем, что выполняется равенство:
|a × b|2 = |a|2 |b|2 sin2 α.
(6.23)
Выразим |a × b|2 через координаты исходных векторов.
|a × b|2 = (ya zb − za yb )2 + (za xb − xa zb )2 + (xa yb − xb ya )2 = ya2 zb2 +
+za2 yb2 + za2 x2b + x2a zb2 + x2a yb2 + x2b ya2 − 2ya zb za yb − 2za xb xa zb − 2xa yb xb ya .
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
275
С другой стороны, правую часть равенства (6.23) можно представить
в виде:
|a|2 |b|2 sin2 α = |a|2 |b|2 (1 − cos2 α) = (x2a + ya2 + za2 )(x2b + yb2 + zb2 )−
−(xa xb + ya yb + za zb )2 = x2a x2b + x2a yb2 + x2a zb2 + ya2 x2b + ya2 yb2 + ya2 zb2 + za2 x2b +
+za2 yb2 + za2 zb2 − x2a x2b − ya2 yb2 − za2 zb2 − 2xa xb ya yb − 2xa xb za zb − 2ya yb za zb =
= ya2 zb2 +za2 yb2 +za2 x2b +x2a zb2 +x2a yb2 +x2b ya2 −2ya zb za yb −2za xb xa zb −2xa yb xb ya .
(6.24)
Из соотношения |a × b|2 = |a|2 |b|2 sin2 α окончательно приходим к
выводу, что |a × b| = |a||b| sin α.
Отсюда следует: если a и b коллинеарны, то a × b = 0 (т. к. sin 0 = 0
и sin π = 0).
Свойство 2.
Если векторы a и b не коллинеарны, то вектор c = a × b ортогонален
каждому из векторов a и b.
Доказательство. Раскроем скалярное произведение векторов с учетом их координат:
(a × b) · a = ya zb xa − za yb xa − xa zb ya + za xb ya + xa yb za − ya xb za = 0. (6.25)
Аналогично (6.25) получим, что (a × b) · b = 0.
Следовательно, вектор c ортогонален и вектору a, и вектору b.
Свойство 3.
a × b = −b × a.
(6.26)
a × (b + c) = a × b + a × c,
(a + b) × c = a × c + b × c.
(6.27)
(6.28)
Свойство 4.
Пример 6.7. Даны векторы a = (3, −1, −2) и b = (1, 2, −1). Найдем
координаты вектора (2a − b) × (2a + b).
Решение. Определим координаты новых векторов: 2a−b = (5, −4, −3),
2a + b = (7, 0, −5). Тогда искомый вектор будет равен
i j k 5 −4 −3 = 20i + 4j + 28k.
(6.29)
7 0 −5
276
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
Получаем ответ: (20, 4, 28).
Пример 6.8. Даны точки A(1, 2, 0), B(3, 0, −3) и C(5, 2, 6). Вычислим
площадь SΔABC треугольника ABC (см. рис. 6.3).
B
A
D
C
Рис. 6.3. К вычислению площади треугольника ABC (пример 6.8)
Площадь треугольника ABC представляет собой площадь половины
−→
−→
параллелограмма, образованного векторами AB = (2, −2, −3) и AC =
= (4, 0, 6). Поэтому
1
1 −→ −→
SΔABC = SABDC = |AB × AC|.
2
2
Далее,
i j k −→ −→ AB × AC = 2 −2 −3 = −12i − 24j + 8k.
4 0 6 Отсюда
SΔABC =
6.4.
1/ 2
12 + 242 + 82 = 14.
2
(6.30)
(6.31)
(6.32)
Смешанное произведение векторов
Смешанным произведением векторов a, b и c называется число
(a, b, c), получаемое как результат вычисления выражения (a × b) · c.
Сначала векторы a и b перемножают векторно, а затем получившийся
вектор умножают на c скалярно.
Легко проверяется формула, выражающая смешанное произведение
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
277
векторов через их координаты:
(a, b, c) ≡ ((a × b) · c) =
xa ya za = (ya zb − za yb )xc + (za xb − xa zb )yc + (xa yb − ya xb )zc = xb yb zb .
xc yc z c (6.33)
Заметим, что для смешанного произведения (a × b) · c применяют
также обозначение (abc).
6.4.1.
Свойства смешанного произведения
Свойство 1.
(a × b) · c = a · (b × c) = (c × a) · b.
(6.34)
abs((a × b) · c) = Vn ,
(6.35)
Свойство 2.
где Vn — объем параллелепипеда, образованного векторами a, b и c
(рис. 6.4).
D
C
B
A
c
C
D
B
a
b
A
Рис. 6.4. К вычислению объема параллелепипеда
Доказательство. По определению числовой проекции вектора c на
прямую, задаваемую вектором a × b, справедливо равенство:
(a × b) · c = |a × b| Pra×b c,
(6.36)
278
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
где |a × b| = S — площадь параллелограмма, лежащего в основании
параллелепипеда.
Вектор a × b ортогонален основанию параллелепипеда, поэтому
Pra×b c совпадает с высотой параллелепипеда h.
Таким образом,
abs((a × b) · c) = S · h,
(6.37)
что и требовалось доказать.
Замечание. Так как тетраэдр ABCA составляет одну шестую часть
объема параллелепипеда, то его объем равен
1
1
VABCA = Vn = abs((a × b) · c).
6
6
(6.38)
Три вектора называют компланарными, если все они параллельны
одной и той же плоскости.
Свойство 3.
Векторы a, b и c компланарны тогда и только тогда, когда (a, b, c) =
= 0.
Пример 6.9. Пусть даны вершины тетраэдра A(2, −1, 1), B(5, 5, 4),
C(3, 2, −1) и D(4, 1, 3). Вычислим его объем.
−→
−→
−−→
Решение. Составим векторы AB = (3, 6, 3), AC = (1, 3, −2) и AD =
= (2, 2, 2). Тогда объем тетраэдра ABCD равен:
⎡
⎤
3 6 3
⎢
⎥
−→ −→ −−→
1
1
⎢
VABCD = abs(AB × AC) · AD) = abs det ⎣1 3 −2⎥
⎦=
6
6
2 2 2
⎡
⎤
1 2 1
⎢
⎥
1
(6.39)
= · 3 · 2 · abs det ⎢
1 3 −2⎥
⎣
⎦ = abs(−3) = 3.
6
1 1 1
Пример 6.10. Установим, компланарны ли векторы a = (2, −1, 2),
b = (1, 2, −3), c = (3, −4, 7).
Решение. Найдем смешанное произведение заданных векторов:
2 −1 2 (a, b, c) = 1 2 −3 = 2 · (14 − 12) + 1 · (7 + 9) + 2 · (−4 − 6) = 0. (6.40)
3 −4 7 Следовательно, векторы a, b и c компланарны.
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
6.5.
279
Двойное векторное произведение
Имея в распоряжении три вектора, например, a, b и c, применим
операцию векторного произведения сначала к b и c, а затем умножим
векторным образом a и b×c. В результате получим двойное векторное
произведение a × (b × c).
Теорема 6.2. Для произвольных векторов трехмерного векторного
пространства a, b и c справедливо тождество
a × (b × c) ≡ b(a · c) − c(a · b).
(6.41)
Доказательство этой теоремы см. в упр. 6.12.
Примечание. Соотношение (6.41) называется также тождеством
Лагранжа.
Следствие. Для операции двойного векторного произведения имеет
место тождество Якоби
a × (b × c) + c × (a × b) + b × (c × a) ≡ 0.
(6.42)
Доказательство. Для каждого из трех слагаемых суммы воспользуемся разложением (6.41):
a × (b × c) = b(a · c) − c(a · b),
b × (c × a) = c(b · a) − a(b · c),
c × (a × b) = a(c · b) − b(c · a).
(6.43)
(6.44)
(6.45)
Вычисление суммы трех векторных произведений (6.43)–(6.45) после
приведения подобных слагаемых приводит к нулю. Следствие доказано.
Контрольные вопросы к главе «Векторы
в трехмерном пространстве»
1. Дайте определение геометрического вектора.
2. Что такое нулевой вектор, единичный вектор?
3. Какие векторы называются коллинеарными?
4. В чем состоит условие равенства векторов?
5. Сформулируйте правило параллелограмма сложения векторов.
280
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
6. Как определяется проекция вектора b на вектор a?
7. Что такое декартова система координат?
8. Перечислите орты декартовой системы координат. Как с их помощью выполнить разложение произвольного вектора по декартовому базису?
9. Дайте определение скалярного произведения векторов.
10. Какие векторы называются ортогональными?
11. Как найти расстояние между двумя точками, заданными своими
декартовыми координатами?
12. Дайте определение векторного произведения векторов.
13. Перечислите свойства векторного произведения.
14. Дайте определение смешанного произведения векторов.
15. Перечислите свойства смешанного произведения.
16. Какие три вектора называются компланарными?
17. Что такое двойное векторное произведение?
18. Запишите тождество Лагранжа для двойного векторного произведения.
19. Запишите тождество Якоби.
Задачи для самостоятельного решения
6.1. Вычислите скалярное и векторное произведения векторов c1 =
= 2a − b и c2 = −a + 3b, если:
а) a = (−2, 1, 1), b = (3, −2, 4);
б) a = (2, 1, −2), b = (−1, 0, −2).
6.2. Заданы вершины треугольника ABC. Вычислите его площадь и
косинус внутреннего угла при вершине B:
а) A(2, 1, 0), B(3, 0, 3), C(2, −3, 7);
б) A(4, −3, 2), B(−1, 4, 3), C(6, 3, −2).
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
281
6.3. Определите, компланарны ли векторы a, b, c:
а) a = (1, 1, 1), b = (2, 3, 0), c = (3, −1, −1);
б) a = (−1, 0, −2), b = (0, 0, −1), c = (−1, 0, 3).
6.4. Докажите, что точки A(1, −1, 1), B(1, 3, 1), C(4, 3, 1) и D(4, −1, 1)
являются вершинами прямоугольника. Вычислите длину его диагоналей.
6.5. Вычислите координаты вектора c, ортогонального векторам a =
= 2j − k и√b = −i + 2j − 3k и образующего тупой угол с осью Oy,
если |c| = 7.
6.6. Найдите угол между векторами a + b и a − b, если a = 3i − j + 2k
и b = i + j − k.
6.7. Векторы a и b образуют угол π/3. Найдите длину вектора a − 2b,
если |a| = 2, |b| = 1.
6.8. При каком значении вещественного параметра d векторы
a = (12, 2, d) и b = (−3, 17d, −1) ортогональны?
6.9. При каком значении вещественного параметра κ векторы трехмерного евклидова векторного пространства t1 = a−10b и t2 = a+κb
будут ортогональными, если |a| = 5, |b| = 3, а угол ϕ между векπ
торами a и b равен ?
6
6.10. При каком значении вещественного параметра κ векторы трехмерного евклидова векторного пространства t1 = 2a+κb и t2 = b−2a
будут ортогональными, если |a| = 1, |b| = 3/2, а угол ϕ между век2π
торами a и b равен
?
3
6.11. Векторы a и b имеют в декартовом базисе координаты a = (a1 , a2 , 0)
и b = (b1 , b2 , 0). Найдите синус угла между этими векторами.
6.12. Докажите теорему о двойном векторном произведении (6.41).
6.13. Докажите тождества, справедливые для произвольных векторов a,
b, c, d.
1) (a × b) · (c × d) ≡ (a · c)(b · d) − (a · d)(b · c);
2) (a × b) × (c × d) ≡ c(abd) − d(abc);
3) a × (b × (c × d)) ≡ (b · d)(a × c) − (b · c)(a × d);
4) (((a × b) × (b × c))((b × c) × (c × a))((c × a) × (a × b))) ≡ (abc)4 .
282
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
6.14. Докажите тождество, справедливое для произвольных векторов a,
b, c, d, e, f :
(a × b) · ((c × d) × (e × f )) ≡ (abd)(cef ) − (abc)(def ).
∗ 6.15. Упростите векторное выражение, зависящее от натурального параметра n:
f n = (a × . . . × (a × (a × b)) . . .) .
!"
#
n произведений
6.16. Докажите, что для p1 , p2 , p3 , p4 , p5 ∈ R3 выполняется равенство:
(p p p ) (p p p )
1 2 5 (p1 p2 p3 )(p1 p4 p5 ) = 1 2 4
.
(p1 p3 p4 ) (p1 p3 p5 )
∗ 6.17. Решите систему линейных уравнений, представленную в векторном
виде, относительно неизвестных величин x1 , x2 , x3 :
α · x = γ,
α × x + β = 0,
где x = (x1 , x2 , x3 ), векторы α = 0, β и скаляр γ не зависят от x1 ,
x2 , x 3 .
∗ 6.18. Решите систему линейных уравнений, представленную в векторном
виде, относительно неизвестных величин x1 , x2 , x3 :
α · x = c1 ,
β · x = c2 ,
γ · x = c3 ,
где x = (x1 , x2 , x3 ), векторы α, β, γ и константы c1 , c2 , c3 не зависят
от x1 , x2 , x3 и (α, β, γ) = 0.
∗ 6.19. Решите систему уравнений относительно неизвестных векторов x
и y:
π × x + ρ × y = σ,
ρ × x − π × y = τ,
где π, ρ, σ, τ ∈ Rn , причем векторы π и ρ не равны нулевому
вектору одновременно.
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
283
Ответы и решения к главе «Векторы
в трехмерном пространстве»
6.1. Решение.
а) Запишем векторы c1 и c2 в координатном виде:
c1 = 2(−2, 1, 1)−(3, −2, 4) = (−7, 4, −2), c2 = −(−2, 1, 1)+3(3, −2, 4) =
= (11, −7, 11).
Скалярное произведение равно c1 ·c2 = −7·11+4·(−7)−2·11 = −127.
Векторное произведение равно
i j k
c1 × c2 = −7 4 −2 = 30i + 55j + 5k = (30, 55, 5).
11 −7 11 б) Запишем векторы c1 и c2 : c1 = (5, 2, −2), c2 = (−5, −1, −4).
Их скалярное произведение равно c1 ·c2 = 5·(−5)+2·(−1)−2·(−4) =
= −19.
Векторное произведение:
i j k
c1 × c2 = 5 2 −2 = −10i + 30j + 5k = (−10, 30, 5).
−5 −1 −4
6.2. Решение.
−→ −−→
а) Вычислим координаты векторов BA и BC:
−→
BA = (2 − 3, 1 − 0, 0 − 3) = (−1, 1, −3),
−−→
BC = (2 − 3, −3 − 0, 7 − 3) = (−1, −3, 4).
Далее определим косинус угла ϕ при вершине B:
−→ −−→
−1 · (−1) + 1 · (−3) + (−3) · 4
BA · BC
/
=
cos ϕ = −→ −−→ = /
(−1)2 + 12 + (−3)2 · (−1)2 + (−3)2 + 42
|BA| · |BC|
14
= −√
.
286
Вычислить площадь можно двумя способами.
Первый способ
284
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
−→ −−→
Векторное произведение BA и BC определяется как
i j k
−→ −−→ BA× BC = −1 1 −3 = (4−9)i−(−4−3)j +(3+1)k = −5i+7j +4k.
−1 −3 4 Подставляем полученные значения координат в формулу для площади
треугольника:
1 −→ −−→
1/
3√
S = |BA × BC| =
(−5)2 + 72 + 42 =
10.
2
2
2
Второй способ
Согласно основному тригонометрическому тождеству (см. Приложение B, формула (B.1)) имеем:
0
√
/
142
3 10
2
=√
sin ϕ = 1 − cos ϕ = 1 −
.
286
286
Подставляем значения координат в формулу площади:
1 −→ −−→
S = |BA| · |BC| · sin ϕ =
2
√
/
3 10 3 √
1/
2
2
2
2
2
2
=
(−1) + 1 + (−3) · (−1) + (−3) + 4 · √
10.
=
2
286 2
Разумеется, оба способа вычисления площади треугольника приводят
к одинаковому ответу:
14
3√
10.
cos ϕ = − √
, S=
2
286
−→ −−→
б) Координаты векторов BA и BC равны
−→
−−→
BA = (5, −7, −1), BC = (7, −1, −5).
Вычислим косинус угла ϕ между этими векторами:
−→ −−→
(BA · BC)
47
5 · 7 + (−7) · (−1) + (−5) · (−1)
/
cos ϕ = −→ −−→ = /
= .
2
2
2
2
2
2
75
5 + (−7) + (−1) · 7 + (−1) + (−5)
|BA| · |BC|
−→ −−→
Далее вычислим векторное произведение BA и BC:
i j k −→ −−→ BA × BC = 5 −7 −1 = 34i + 18j + 44k.
6 −1 −5
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
285
Подставляем значения координат в формулу площади:
√
1 −→ −−→
1 /
S = |BA × BC| = · 342 + 182 + 442 = 854.
2
2
Окончательно получаем:
cos ϕ =
47
,
75
S=
√
854.
6.3. Решение.
а) Поскольку определитель, составленный из координат векторов, не
равен нулю:
1
1
1
2 3 0 = −12,
3 −1 −1
то векторы a, b и c не компланарны.
б) Определитель, составленный из координат векторов, равен нулю:
−1 0 −2
0 0 1 = 0,
−1 0 3 следовательно, эти векторы компланарны.
6.4. Решение.
Заметим, что точки A, B, C и D лежат в одной плоскости, поскольку
аппликата у всех этих точек равна z = 1.
Докажем, что эти четыре точки являются вершинами параллелограмма. Для этого докажем следующие равенства:
−→
−−→
|AB| = |CD|,
−−→
−−→
|BC| = |AD|.
.
Определяем координаты введенных в рассмотрение векторов:
−→
AB = (1 − 1, 3 − (−1), 1 − 1) = (0, 4, 0),
−−→
CD = (4 − 4, −1 − 3, 1 − 1) = (0, −4, 0),
−−→
BC = (4 − 1, 3 − 3, 1 − 1) = (3, 0, 0),
−−→
AD = (4 − 1, −1 − (−1), 1 − 1) = (3, 0, 0).
286
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
Следовательно,
⎧ −→
√
⎪
|AB| = 02 + 42 + 02 = 4,
⎪
⎪
√
⎪
−→
⎨ |−
CD| = 02 + 42 + 02 = 4,
√
−−→
⎪
32 + 02 + 02 = 3,
|
BC|
=
⎪
⎪
√
⎪
−
−
→
⎩
|AD| = 32 + 02 + 02 = 3;
−→
−−→
|AB| = |CD|,
⇒ −−→
−−→
|BC| = |AD|.
π
Если один из углов параллелограмма будет равен , то все остальные
2
π
углы также будут равны .
2
−→ −−→
Покажем, что скалярное произведение векторов AB и AD равно нулю:
−→ −−→
−→ −−→
AB · AD = 0 · 3 + 4 · 0 + 0 · 0 = 0 ⇒ AB ⊥ AD.
Следовательно, ABCD — прямоугольник. Найдем его диагонали с помощью теоремы Пифагора:
/
/
AC = AB 2 + BC 2 = 42 + 32 = 5.
Ясно, что AC = BD, т. к. у прямоугольника диагонали равны.
В итоге получаем: AC = BD = 5.
6.5. Решение.
Пусть c = (cx , cy , cz ), где cx , cy , cz — неизвестные координаты вектора.
Условие ортогональности a и c имеет вид: a · c = 0, или 2cy − cz = 0.
Далее, условие ортогональности
b и c: b · c = 0, или −cx + 2cy − 3cz = 0.
√
вектора равна квадратному корню из суммы
Поскольку |c| = 7 и длина 2
√
квадратов его координат, то c2x + c2y + c2z = 7, что можно записать как
c2x + c2y + c2z = 7.
Получаем систему из трех уравнений
cy , c z :
⎧
⎪
2cy − cz
⎪
⎨
−cx + 2cy − 3cz
⎪
⎪
⎩
c2 + c2 + c2
x
y
z
относительно переменных cx ,
= 0,
= 0,
= 7.
Выберем в качестве независимой переменной cy и выразим через нее
две другие переменные системы: cz = 2cy и cx = 2cy −3cz = 2cy −3(2cy ) =
= −4cy . Следовательно, c = (−4c√y , cy , 2cy ) = cy (−4, 1,/2), где cy ∈ R.
Длина вектора√c равна |c| = 7, поэтому abs(cy ) (−4)2 + 12 + 22 =
√
7
1
1
= 7, abs(cy ) = √ = √ , и cy = ± √ .
21
3
3
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
287
Согласно условию, вектор c образует тупой угол с осью Oy, т. е.
cos ϕ < 0, где ϕ — угол между векторами c и j. Поскольку
cos ϕ =
c·j
cy
= √ < 0,
|c||j|
7
1
то cy = − √ .
3
1
Окончательно получаем: c = √ (4, −1, −2).
3
6.6. Решение.
Запишем векторы a и b в координатном виде:
a = (3, −1, 2),
b = (1, 1, −1).
Тогда сумма и разность этих векторов равны
a + b = (3 + 1, −1 + 1, 2 + (−1)) = (4, 0, 1),
a − b = (3 − 1, −1 − 1, 2 − (−1)) = (2, −2, 3).
Воспользуемся формулой косинуса угла α между векторами:
cos α =
(a · b)
.
|a| · |b|
После несложных вычислений получим:
cos α =
4 · 2 + 0 · (−2) + 1 · 3
11
(a + b) · (a − b)
/
=√
= .
|a + b| · |a − b|
17
42 + 02 + 12 · 22 + (−2)2 + 32
Следовательно, α = arccos
11
.
17
6.7. Решение.
Вычислим |a − 2b|2 :
|a−2b|2 = (a−2b)·(a−2b) = a·a−4a·b+4b·b = |a|2 −4|a||b| cos ϕ+4|b|2 ,
где ϕ = π/3 — угол между векторами a и b. Подставив числовые значения, получим: |a − 2b|2 = 1, следовательно, |a − 2b| = 1.
288
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
6.8. Решение.
Как известно, необходимым и достаточным условием ортогональности двух векторов является равенство нулю их скалярного произведения:
a · b = 0. Подставляем значения координат из условия:
12 · (−3) + 2 · 17d − 1 · d = 0,
12
d= .
11
Следовательно, векторы a и b являются ортогональными при значении
12
параметра d = .
11
6.9. Решение.
Для того чтобы векторы были ортогональными, необходимо, чтобы
их скалярное произведение было равно нулю: t1 · t2 = 0,
(a − 10b) · (a + κb) = 0,
a · a + κa · b − 10a · b − 10κb · b = 0.
√
10 3 − 10
Отсюда находим: κ = √
.
3 3 − 36
6.10. Решение.
Необходимое условие ортогональности векторов: t1 · t2 = 0 или
(2a + κb) · (b − 2a) = 0,
2ab − 4|a|2 + κ|b|2 − 2κab = 0.
3
9κ 3κ
= 0,
+
Подставляем числовые значения из условия: − − 4 +
2
4
2
22
следовательно, κ = .
15
6.11. Ответ: sin ϕ = /
6.15. Ответ:
f n = (−1)n/2 an−2
a 1 b 2 − a2 b 1
/
.
+ b21 a22 + b22
a21
a(a × b),
a2 b − (a · b)a,
если n нечетно,
если n четно.
ГЛАВА 6. ВЕКТОРЫ В ТРЕХМЕРНОМ ПРОСТРАНСТВЕ
289
6.17. Ответ:
γ
1
x = 2 α + 2 α × β.
α
a
6.18. Ответ:
&
'
1
c1 (β × γ) + c2 (γ × α) + c3 (α × β) .
x=
(α, β, γ)
6.19. Решение.
Умножим первое уравнение системы на вектор ρ скалярно справа,
второе уравнение умножим на вектор π скалярно справа. Вычитая одно
уравнение из другого, находим:
x=−
π×σ+ρ×τ
+ γ1 π + γ2 ρ,
π 2 + ρ2
где γ1 , γ2 — вещественные числа.
Подставив полученное выражение в первое уравнение системы, найдем y:
π×τ −ρ×σ
+ γ2 π − γ1 ρ.
y=
π 2 + ρ2
Глава 7
Уравнение прямой на плоскости
7.1.
Уравнение прямой с угловым
коэффициентом
Рассмотрим декартову систему координат на плоскости.
Пусть прямая L пересекает ось Oy в точке B с координатами (0, b)
и образует с осью Ox угол α (см. рис. 7.1). Для определенности будем
π
предполагать, что угол α < .
2
y
A(x, y) L
B(0, b)
C
α
O
x
Рис. 7.1. Прямая L на плоскости xOy
Возьмем на прямой произвольную точку A c координатами (x, y).
Далее опустим из точки A перпендикуляр на ось Ox, а из точки B —
перпендикуляр на ось Oy. Рассмотрим полученный треугольник ABC.
Очевидно, что BC = x, AC = y − b, ∠ABC = α. Так как AC = BC tg α,
получим y − b = x · tg α или y = tg α · x + b.
Powered by TCPDF (www.tcpdf.org)
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
291
Обозначим тангенс угла α через k. Величину k = tg α называют угловым коэффициентом прямой на плоскости. В итоге приходим к
уравнению прямой вида
y = kx + b.
(7.1)
Оно носит название уравнение прямой с угловым коэффициентом.
Примечание. Для прямых вида y = const угловой коэффициент равен
нулю, для прямых вида x = const угловой коэффициент не определен.
7.2.
Общее уравнение прямой
Общее уравнение прямой на плоскости имеет вид:
Ax + By + C = 0.
(7.2)
Вещественные числа A, B и C называются коэффициенты уравнения прямой.
Величины A и B не могут одновременно равняться нулю, так как в
этом случае если C = 0, то этому уравнению будут удовлетворять все
точки плоскости. Если же C = 0, то данному уравнению не удовлетворяет ни одна точка
плоскости.
A
Вектор n =
называется нормальным вектором прямой, или
B
нормалью. Нормальный вектор ортогонален соответствующей прямой
(см. рис. 7.2).
y
n
O
x
Рис. 7.2. Построение n — нормального вектора к прямой
292
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
Пусть выполняется неравенство B = 0. В этом случае слагаемое By
можно перенести вправо и разделить обе части уравнения на −B = 0.
В результате получим:
Ax + C = −By
(7.3)
или
C
A
(7.4)
x − = y.
B
B
C
A
Введем обозначения − = k и − = b, тогда придем к уравнению
B
B
y = kx + b, которое является уравнением прямой с угловым коэффициентом (см. (7.1)).
−
7.3.
Уравнение прямой с угловым
коэффициентом, проходящей через
заданную точку
Рассмотрим уравнение прямой с угловым коэффициентом:
y = kx + b.
(7.5)
Пусть эта прямая проходит через точку с координатами (x0 , y0 ). Подставим эти координаты в уравнение:
y0 = kx0 + b.
(7.6)
Вычтем из уравнения (7.5) уравнение (7.6). Получим искомое уравнение прямой с угловым коэффициентом, проходящей через заданную точку:
(7.7)
(y − y0 ) = k(x − x0 ).
Пример 7.1. Найдем уравнение прямой с угловым коэффициентом
k = 2, проходящей через точку T (1, 5).
Решение. Воспользуемся формулой (7.7). Тогда имеем:
(y − 5) = 2(x − 1),
(7.8)
y = 2x + 3.
(7.9)
или
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
7.4.
293
Уравнение прямой, проходящей через
две заданные точки
Найдем уравнение прямой, проходящей через две заданные точки
T1 (x1 , y1 ) и T2 (x2 , y2 ) при условии x1 = x2 и y1 = y2 . Для этого запишем уравнение прямой в виде (7.7), предполагая, что она проходит через
точку T1 :
y − y1 = k(x − x1 ).
(7.10)
Так как данная прямая проходит и через точку T2 , то ее координаты
подставим в уравнение (7.10):
y2 − y1 = k(x2 − x1 ).
(7.11)
Разделим уравнение (7.10) на (7.11). Получим
y − y1
x − x1
=
.
y2 − y1
x2 − x1
(7.12)
Это и есть уравнение прямой, проходящей через две заданные
точки.
Примечание. Формула (7.12) неприменима в случае равенства абсцисс или равенства ординат исходных точек T1 и T2 . Если x1 = x2 , то
уравнение прямой T1 T2 имеет вид x = x1 . Если выполняется условие
y1 = y2 , то уравнение этой прямой имеет вид y = y1 .
Пример 7.2. Найдем уравнение прямой, проходящей через точки
T1 (a, b) и T2 (b, a), где a, b ∈ R, причем a = b.
Решение. Воспользуемся формулой (7.12). Поставим в нее координаты точек x1 = a, y1 = b, x2 = b, y2 = a:
y−b x−a
=
.
a−b
b−a
(7.13)
После простых преобразований получим уравнение прямой:
y − b = −(x − a),
(7.14)
x + y − a − b = 0.
(7.15)
294
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
y
α
α2
α1
x
O
Рис. 7.3. Определение угла α между двумя прямыми
7.5.
Угол между двумя прямыми
Рассмотрим две прямые, заданные уравнениями y = k1 x + b1 и y =
= k2 x + b2 (см. рис. 7.3).
Под углом α между прямыми будем понимать угол, на который нужно повернуть одну из этих прямых вокруг точки их пересечения против
часовой стрелки до первого совмещения с другой прямой.
Из рис. 7.3 видно, что угол α между прямыми равен α1 −α2 . При этом
выполняются равенства tg α1 = k1 и tg α2 = k2 . В этом случае на основании формулы тангенса разности двух аргументов (см. формулу (B.14)
в Приложении B) можно записать:
tg α = tg(α1 − α2 ) =
tg α1 − tg α2
k 1 − k2
=
.
1 + tg α1 · tg α2
1 + k 1 k2
Отсюда
α = arctg
k1 − k2
.
1 + k 1 k2
(7.16)
(7.17)
Поменяв местами параметры k1 и k2 , получим тангенс смежного
угла ϕ
4 = π − ϕ.
Из полученной формулы (7.17) вытекают два следствия.
а) Прямые с угловыми коэффициентами k1 и k2 ортогональны, если
1
выполняется условие 1 + k1 k2 = 0, что эквивалентно k2 = − .
k1
б) Прямые параллельны, если k1 = k2 .
Рассмотрим прямые, заданные уравнениями в общем виде:
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
A1 x + B1 y + C1 = 0 и A2 x + B2 y + C2 = 0.
A1
A2
и k2 = − . Следовательно,
Тогда k1 = −
B1
B2
tg α =
A2 B1 − A1 B2
.
A1 A 2 + B 1 B 2
295
(7.18)
(7.19)
Из (7.19) непосредственно следует, что прямые, заданные уравнениями (7.18), ортогональны при A1 A2 + B1 B2 = 0 и параллельны при
A2 B1 − A1 B2 = 0.
Пример 7.3. Дана прямая 2x−5y+1 = 0. Составим уравнение прямой,
проходящей через точку T0 (3, 3):
а) параллельно данной прямой;
б) перпендикулярно к данной прямой.
Решение.
A
2
2
= .
а) Определим угловой коэффициент k0 = − = −
B
(−5) 5
Запишем уравнение прямой, проходящей через данную точку с заданным угловым коэффициентом k1 = k0 :
y − y0 = k1 (x − x0 ),
(7.20)
2
y − 3 = (x − 3).
(7.21)
5
Таким образом, искомая прямая имеет вид: 2x − 5y + 9 = 0.
б) Найдем угловой коэффициент прямой, перпендикулярной к дан1
5
ной: k2 = − = − .
k0
2
Запишем уравнение прямой, проходящей через данную точку с заданным угловым коэффициентом k2 :
y − y0 = k2 (x − x0 ),
5
y − 3 = − (x − 3).
2
Получаем уравнение прямой: 5x + 2y − 21 = 0.
7.6.
(7.22)
(7.23)
Уравнение прямой в отрезках
Рассмотрим уравнение прямой Ax + By + C = 0, где величины A, B
и C не равны нулю.
296
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
Проведем следующее его преобразование:
−
A
B
x − y = 1.
C
C
(7.24)
C
C
Введем обозначения: a = − и b = − .
A
B
В результате получим уравнение:
x y
+ = 1,
a b
(7.25)
которое и является уравнением прямой в отрезках (intercept equation
of a straight line).
Очевидно, что заданная прямая проходит через точки с координатами (a, 0) и (0, b). Она представлена на рис. 7.4.
y
b
a
x
O
Рис. 7.4. Прямая, проходящая через точки (a, 0) и (0, b)
Таким образом, эта прямая отсекает на осях координат отрезки длиной abs(a) и abs(b).
7.7.
Нормальное уравнение прямой
Рассмотрим произвольную прямую L. Проведем через начало координат O прямую, перпендикулярную L, и обозначим буквой P точку
пересечения указанных прямых.
На прямой OP возьмем единичный вектор n, направление которого
−→
совпадает с направлением вектора OP .
−→
Пусть p = |OP |, а угол θ — это угол между вектором n и осью Ox
(см. рис. 7.5).
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
297
y
P
n
T (x, y)
θ
O
L
x
Рис. 7.5. К выводу нормального уравнения прямой
Так как n — единичный вектор, то его координаты равны проекциям
этого вектора на оси координат:
n = (cos θ, sin θ).
(7.26)
Произвольная точка T (x, y) лежит на рассматриваемой прямой L то−→
гда и только тогда, когда проекция вектора OT на ось, определяемую
вектором n, равна p:
−→
Prn OT = p.
(7.27)
Как известно,
−→
−→ OT · n −→
= OT · n.
(7.28)
Prn OT =
|n|
−→
Имея в виду, что OT = (x, y), а вектор n определяется равенством
(7.26), получим следующее выражение для их скалярного произведения:
−→
OT · n = x cos θ + y sin θ.
(7.29)
Из рассуждений, приведенных выше, следует, что точка T (x, y) лежит на прямой L тогда и только тогда, когда координаты этой точки
удовлетворяют соотношению:
x cos θ + y sin θ − p = 0.
(7.30)
Это уравнение называется нормальным уравнением прямой L,
или нормальной формой Гессе1 .
1
Гессе (Ludwig Otto Hesse) (1811–1874) — немецкий математик
298
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
Пусть прямая L задана общим уравнением
Ax + By + C = 0,
(7.31)
где C = 0.
Для того чтобы преобразовать общее уравнение прямой к нормальному виду, обе части уравнения умножим на так называемый нормирующий множитель
μ = −√
1
sgn(C),
A2 + B 2
где sgn(C) — знак коэффициента C,
⎧
⎪
⎨+1,
sgn(C) =
0,
⎪
⎩
−1,
(7.32)
определяемый по правилу:
если C > 0,
если C = 0,
если C < 0.
(7.33)
В результате новые коэффициенты при x и y (а именно, μA и μB)
будут удовлетворять условию
(μA)2 + (μB)2 = 1.
(7.34)
Если подобрать угол θ так, чтобы cos θ = μA и sin θ = μB, а p =
= −abs(μC), то получим нормальное уравнение прямой.
Примечание. Если выполняется условие C = 0, то прямая проходит
через начало координат и нормирующий множитель можно взять с про1
.
извольным знаком: μ = ± √
2
A + B2
Введем понятие отклонения произвольной точки T (x, y) от данной
прямой L. Пусть число d обозначает расстояние от точки T до данной
прямой.
Назовем отклонением δ точки T от прямой L число +d в случае, когда
точка T и начало координат O лежат по разные стороны от прямой L,
и число ( − d) в случае, когда точки T и O лежат по одну сторону от L.
Покажем, что левая часть нормального уравнения прямой равна отклонению точки T (x, y) от этой прямой.
Пусть Q — проекция точки T на ось, определяемую вектором n.
Отклонение δ точки T от прямой L равно P Q.
Из рис. 7.6 видно, что
δ = P Q = OQ − OP = OQ − p.
(7.35)
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
299
y
L
Q
P
T (x, y)
n
O
x
Рис. 7.6. Отклонение δ = P Q точки T от прямой L
−→
Но OQ = Prn OT = x cos θ + y sin θ. Итак,
OQ = x cos θ + y sin θ.
(7.36)
Сопоставляя полученные формулы (7.35) и (7.36), получим
δ = x cos θ + y sin θ − p.
(7.37)
Это приводит нас к следующему правилу: для нахождения отклонения
δ точки T (x0 , y0 ) от прямой L следует в левую часть нормального уравнения прямой подставить вместо x и y координаты x0 и y0 точки T .
Расстояние от точки T до прямой L равно модулю отклонения.
Пример 7.4. Вычислим расстояние от точки T (5, 4) до прямой, проходящей через точки A(1, −2) и B(0, 3).
Решение. Запишем уравнение прямой, проходящей через точки A и
B:
x−1 y+2
или 5x + y − 3 = 0.
(7.38)
=
−1
5
1
Умножив полученное равенство на μ = √ , приведем это уравнение
26
к нормальному виду:
5x
y
3
√ + √ − √ = 0.
26
26
26
Тогда расстояние d от точки T до прямой будет равно
√
5·5
4
3
26
= √ = 26.
d = abs √ + √ − √
26
26
26
26
(7.39)
(7.40)
300
7.8.
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
Отрезки прямых
Отрезком (line segment) M1 M2 называется часть прямой, расположенная между двумя ее точками M1 (x1 , y1 ) и M2 (x2 , y2 ). Точки M1 (x1 , y1 )
и M2 (x2 , y2 ) являются концами (endpoints) отрезка [38].
Множество точек, принадлежащих отрезку, задается следующим образом:
M1 M2 = {(x, y) : x = (1 − t)x1 + tx2 , y = (1 − t)y1 + ty2 , t ∈ [0, 1]}. (7.41)
Существует эквивалентный способ записи M1 M2 :
M1 M2 = {(x, y) : x = x1 + (x2 − x1 )t, y = y1 + (y2 − y1 )t, t ∈ [0, 1]}. (7.42)
О переменной 0 t 1 в формулах (7.41) и (7.42) говорят как о
параметре отрезка.
Пример 7.5. Напишем программу на Python, которая по координатам
концов отрезка определяет, в каких координатных четвертях он расположен. Например, отрезок L1 L2 , соединяющий точки L1 (−1, −2) и L2 (4, 1),
лежит в I, III и IV четвертях. Еще один пример: отрезок, соединяющий
точки M1 (−1, −2) и M2 (−1, −2), целиком принадлежит II четверти (см.
рис. 7.7, где изображены отрезки L1 L2 и M1 M2 и отмечены номера каждой из координатных четвертей).
Решение.
Для представления точки декартовой плоскости в программе на языке Python создадим класс Point, состоящий из двух полей — x и y, представляющих собой координаты этой точки.
Таким образом, отрезок определяется граничными точками, обозначим их через P1 и P2 .
Основную вычислительную работу выполняет функция get_quadrants(p1, p2). Она возвращает список, содержащий номера четвертей,
в которых расположен отрезок P1 P2 .
Вспомогательная функция get_quadrant(p) используется для определения номера четверти, которой принадлежит единственный аргумент — точка p. Эта функция возвращает целое число из множества
{0, 1, 2, 3, 4}. Значение get_quadrant(p) будет равно нулю тогда и только тогда, когда p лежит на координатной оси Ox или Oy и, следовательно, не принадлежит ни одной из четвертей плоскости.
Выполнение функции get_quadrants(p1, p2) начинается с проверки, лежат ли точки p1 и p2 в смежных четвертях, т. е. образующих
неупорядоченные пары 1–2, 2–3, 3–4, 4–1. В ходе этой проверки переменным p1_quad и p2_quad будут присвоены номера четвертей, которым
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
301
y
II
I
M1
M2
L2
x
O
L1
III
IV
Рис. 7.7. К примеру 7.5. Отрезок L1 L2 лежит в I, III и IV четвертях, а
отрезок M1 M2 целиком принадлежит II четверти
принадлежат точки p1 и p2 соответственно. Поскольку номера смежных
четвертей отличаются на единицу по модулю два, то значение логической
переменной
is_adjacent = abs(p1_quad - p2_quad) % 2 == 1
равное false, служит достаточным признаком смежности.
Далее выполняются следующие действия. Если точки p1 и p2 лежат в смежных четвертях, то в итоговый список записываются значения p1_quad и p2_quad, после чего функция get_quadrants() завершает
свою работу.
В противном случае осуществляется проверка равенства чисел p1_quad и p2_quad. Если оно справедливо, то весь отрезок лежит в четверти
с номером p1_quad и функция get_quadrants() заканчивает работу.
Остается заключительный случай противоположных четвертей, т. е.
пар 1–3 или 2–4. Прямая, проведенная через точки p1 и p2, пересекает
ось ординат в точке с координатами (0, b), где
b = (p1.y * p2.x - p1.x * p2.y)/(p2.x - p1.x).
(7.43)
Если p1_quad = 1 или p1_quad = 3, то при b > 0 необходимо в итоговый
список дополнительно записать вторую четверть, при b < 0 — четвер-
302
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
тую. Иначе (в случае p1_quad ∈ {2, 4}) при b > 0 необходимо в этот
список дополнительно записать первую четверть, при b < 0 — третью.
Таким образом исчерпаны все возможные случаи расположения отрезка P1 P2 относительно координатных осей при условии, что ни один
из концов отрезка не лежит на координатной оси.
В Листинге 7.1 приведен текст программы, определяющей по координатам концов отрезка, в каких координатных четвертях он расположен.
Листинг 7.1
1 class Point :
2
def __init__ ( self , x , y ):
3
self . x = x
4
self . y = y
5
6
7 def get_quadrant ( p ):
8
if p . x > 0 and p . y > 0:
9
return 1
10
elif p . x < 0 and p . y > 0:
11
return 2
12
elif p . x < 0 and p . y < 0:
13
return 3
14
elif p . x > 0 and p . y < 0:
15
return 4
16
else :
17
return 0
18
19
20 def get_quadrants ( p1 , p2 ):
21
p1_quad = get_quadrant ( p1 )
22
p2_quad = get_quadrant ( p2 )
23
24
is_adjacent = abs ( p1_quad - p2_quad ) % 2 == 1
25
26
if is_adjacent :
27
return [ p1_quad , p2_quad ]
28
elif p1_quad == p2_quad :
29
return [ p1_quad ]
30
else :
31
b = ( p1 . y * p2 . x - p1 . x * p2 . y ) \
32
/ ( p2 . x - p1 . x )
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
33
34
35
36
37
38
39
40
41
if b == 0:
return [ p1_quad , p2_quad ]
elif p1_quad == 1 or p2_quad == 3:
quadrant = 2 if b > 0 else 4
return [ p1_quad , p2_quad , quadrant ]
else :
quadrant = 1 if b > 0 else 3
return [ p1_quad , p2_quad , quadrant ]
303
Самый общий случай, когда P1 или P2 могут принадлежать осям координат, рассмотрен в упражнении 7.30. В решении этого упражнения
приводится функция get_quadrants_general(), свободная от указанного ограничения.
Контрольные вопросы к главе «Уравнение
прямой на плоскости»
1. Как определяется угловой коэффициент прямой на плоскости?
2. Запишите уравнение прямой с угловым коэффициентом.
3. Какой вид имеет общее уравнение прямой на плоскости?
4. Что такое нормаль к прямой?
5. Как выглядит уравнение с угловым коэффициентом для прямой,
проходящей через заданную точку.
6. Запишите уравнение прямой, проходящей через две заданные точки.
7. Как вычислить угол между двумя прямыми?
8. Запишите уравнение прямой в отрезках.
9. Дайте определение отклонения произвольной точки от данной прямой.
10. Для решения какой задачи удобно использовать нормальное уравнение прямой?
11. Как с помощью параметра задать множество точек отрезка M1 M2 ?
304
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
Задачи для самостоятельного решения
7.1. Определите точку пересечения прямых 2x−3y+4 = 0 и 4x+y−6 =
= 0.
7.2. Стороны треугольника лежат на прямых 5x − y + 12 = 0, x + y +
+3 = 0 и 4x + 3y − 6 = 0. Определите координаты вершин этого
треугольника.
7.3. Координаты вершин треугольника равны (5, −4), (6, −6) и (−15, 4).
Определите уравнения его сторон.
7.4. Покажите, что площадь треугольника с вершинами (x1 , y1 ), (x2 , y2 )
и (x3 , y3 ) равна
x1 y1 1
1
(7.44)
S = abs x2 y2 1 .
2
x3 y3 1
7.5. Стороны треугольника лежат на прямых x+y+1 = 0, x+2y−3 = 0
и 4x − 3y − 2 = 0. Вычислите площадь этого треугольника.
7.6. Медианой треугольника называется отрезок, соединяющий его
вершину с серединой противоположной стороны. Составьте уравнения прямых, на которых лежат медианы треугольника ABC, если
A(1, 2), B(4, −3), C(6, 6).
7.7. Вычислите расстояние от точки T (1, 7) до прямой, проходящей через точки A(−3, −20) и B(4, 17).
7.8. Вычислите расстояние от начала координат до прямой, заданной
x − x0 y − y0
+
= 0, где x0 , y0 — вещественные числа,
уравнением
x0
y0
не равные нулю.
7.9. Одна из сторон квадрата лежит на прямой x + 3y + 10 = 0. Определите площадь этого квадрата, если координаты одной из его вершин (−4, −4).
7.10. В какой точке пересекаются прямые, заданные уравнениями x/a +
+y/b = 1 и x/b + y/a = 1, где a, b = 0?
7.11. Определите угол между прямыми 3x+5y−10 = 0 и −2x+y+4 = 0.
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
305
7.12. Определите, при каких значениях параметров λ и μ прямые λx +
+6y − 2 = 0 и 2x + 3y − μ = 0:
1) имеют ровно одну общую точку;
2) совпадают;
3) параллельны.
7.13. Вычислите расстояние между параллельными прямыми, заданными уравнениями Ax + By + C = 0 и Ax + By + C = 0, где C = C .
∗ 7.14. При каком условии прямые A1 x+B1 y +C1 = 0, A2 x+B2 y +C2 = 0,
. . . , An x + Bn y + Cn = 0 пересекаются в одной точке?
7.15. Прямая L проходит через точку T (x0 , y0 ) под углом α к оси абсцисс.
Запишите уравнение прямой L∗ , проходящей через ту же точку T0
под углом Δα к прямой L.
∗ 7.16. Стороны треугольника заданы уравнениями Ai x + Bi y + Ci = 0,
где i = 1, 2, 3. Найдите уравнение
а) медианы,
б) высоты,
в) биссектрисы,
проведенной к третьей стороне.
7.17. Вычислите площадь треугольника, отсекаемого прямой Ax + By +
+C = 0 от координатного угла.
7.18. Найдите уравнение прямой, проходящей через точку T (x0 , y0 ) и отсекающей от координатного угла треугольник с площадью, равной
S. Величины x0 и y0 положительны.
7.19. Пусть некоторая прямая, проходящая через точку T (x0 , y0 ), отсекает от координатного угла прямоугольный треугольник. Чему равна
наименьшая площадь такого треугольника? Величины x0 и y0 положительны.
∗ 7.20. Стороны треугольника заданы уравнениями αi x + βi y + γi = 0,
где i = 1, 2, 3. Покажите, что площадь этого треугольника можно
вычислить по формуле
S=
Δ2
1
,
2 abs(Δ1 Δ2 Δ3 )
(7.45)
306
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
α1 β1 γ1 где Δ = α2 β2 γ2 , Δi — алгебраические дополнения элементов
α3 β3 γ3 γi , i ∈ {1, 2, 3}.
7.21. Докажите, что точки T1 (−2, −8), T2 (18, 2) и T3 (3, −11/2) лежат на
одной прямой.
7.22. Для каких значений вещественного параметра a точки T1 (0, 1),
T2 (a, 2) и T3 (3, a) лежат на одной прямой?
7.23. Даны координаты вершин треугольника: A(1,−1),B(2,4),C(−8,−1).
Составьте уравнение прямой, проходящей через вершину A параллельно стороне BC.
7.24. Даны координаты вершин треугольника: A(−2,0),B(2,3),C(−1,−1).
Составьте уравнение прямой, проходящей через вершину B параллельно стороне AC.
7.25. Про точку N известно, что она лежит на оси ординат
√ и расстояние
от этой точки до N (−2, −5/2) равняется d = 2 2. Определите
координаты точки N .
7.26. Известно, что площадь треугольника равна S = 6 и две его вершины имеют координаты (1, 1) и (−2, −3). Определите координаты
третьей вершины треугольника, если эта вершина лежит на оси
абсцисс.
7.27. Известно, что площадь треугольника равна S = 10 и две его вершины имеют координаты (−2, 3) и (−7, −1). Определите координаты
третьей вершины треугольника, если эта вершина лежит на оси
ординат.
7.28. Найдите проекцию точки (2, −13) на прямую, проходящую через
точки (0, 2) и (2, −8).
7.29. Найдите проекцию точки (a, a) на прямую, проходящую через точки (1, 2a) и (2, 3a), если a — произвольное вещественное число.
7.30. Составьте программу на Python, которая по координатам концов
отрезка определяет, в каких координатных четвертях он расположен. В отличие от решения примера 7.5 на с. 300, рассмотрите полный набор возможных случаев, в том числе и такой, когда концы
отрезка могут принадлежать осям координат.
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
307
Ответы и решения к главе «Уравнение
прямой на плоскости»
7.1. Ответ: (1, 2).
7.2. Ответ: (−5/2, −1/2), (−30/19, 78/19), (15, −18).
7.3. Решение.
Воспользуемся уравнением прямой, проходящей через две заданные
точки (7.12):
x − x1
y − y1
=
.
y2 − y1
x2 − x1
Подставляя координаты точек из условия задачи, получаем уравнения
сторон треугольника:
2x + y − 6 = 0,
2x + 5y + 10 = 0,
10x + 21y + 66 = 0.
7.4. Решение.
Обозначим вершины треугольника (x1 , y1 ), (x2 , y2 ) и (x3 , y3 ) через A1 ,
A2 и A3 соответственно.
Как известно (см. с. 276), площадь произвольного треугольника может быть представлена как половина модуля векторного произведения
−−−→ −−−→
A1 A2 × A1 A3 :
1 −−−→ −−−→
1 x2 − x1 y2 − y1 S = |A1 A2 × A1 A3 | = .
2
2 x3 − x1 y3 − y1 Это выражение можно переписать в эквивалентном виде:
x1 y1 1
1
S = abs x2 y2 1 .
2
x3 y3 1
Таким образом, формула (7.44) доказана. Из нее следует, что необходимым и достаточным условием принадлежности трех точек одной прямой является равенство нулю соответствующего определителя третьего порядка.
308
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
7.5. Решение.
Решая системы уравнений
x + y + 1 = 0,
x + y + 1 = 0,
x + 2y − 3 = 0;
4x − 3y − 2 = 0;
x + 2y − 3 = 0,
4x − 3y − 2 = 0,
находим координаты вершин треугольника: (−5, 4), (−1/7, −6/7),
(13/11, 10/11). Как показано в упр. 7.4, площадь произвольного треугольника A1 A2 A3 , координаты вершин которого есть (x1 , y1 ), (x2 , y2 )
и (x3 , y3 ) соответственно, равна
x1 y1 1
1
S = abs x2 y2 1 .
2
x3 y3 1
В нашем случае
4
1
−5
1 & 1156 ' 578
1
S = abs −1/7 −6/7 1 = abs
=
.
2
77
77
2
13/11 10/11 1
Примечание. Решение задачи о нахождении площади треугольника
по уравнениям его сторон см. в упр. 7.20.
7.6. Решение.
Абсцисса и ордината середины отрезка с концами (x1 , y1 ) и (x2 , y2 )
определяются по формулам xm = (x1 + x2 )/2, xm = (y1 + y2 )/2 соответственно.
Находим середины сторон: (5/2, −1/2), (7/2, 4), (5, 3/2).
Далее применяем формулу (7.12) и получаем следующие уравнения
медиан треугольника ABC:
x + 8y − 17 = 0,
14x + y − 53 = 0,
13x − 7y − 36 = 0.
7.7. Решение.
Общее уравнение прямой, проходящей через точки (−3, −20) и (4, 17),
имеет вид 37x − 7y − 29 = 0.
Получим нормальное уравнение этой прямой. Нормирующий множитель (7.32) равен
μ = −√
1
372 + 72
sgn(−29) = √
1
.
1418
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
309
Итак, уравнение в нормальной форме:
√
37
7
29
x− √
y−√
= 0,
1418
1418
1418
и отклонение точки T (1, 7) от прямой равно
δ=√
7
29
41
37
·1− √
·7− √
= −√
.
1418
1418
1418
1418
Следовательно, искомое расстояние равно √
41
.
1418
7.8. Решение.
Приведем уравнение прямой к нормальной форме.
Нормирующий множитель равен
1
1
sgn(−2x0 y0 ) = / 2
sgn(x0 y0 ),
μ = −/ 2
2
x0 + y0
x0 + y02
следовательно, уравнение прямой может быть записано в виде:
&
'
x
y
xy
/ 0
/ 0
/ 0 0
x
+
y
−
2
sgn(x0 y0 ) = 0.
x20 + y02
x20 + y02
x20 + y02
Вычисляем отклонение от начала координат (0, 0):
δ = −2 /
x0 y0
x20 + y02
sgn(x0 y0 ).
Расстояние от начала координат до прямой равно абсолютной вели2 abs(x0 y0 )
чине отклонения: / 2
.
x0 + y02
7.9. Решение.
1
3
10
Отклонение от точки (−4, −4) до прямой − √ x − √ y − √ = 0
10
10
10
0
2
.
равно δ = −3
5
0
2
, оно
Значит, расстояние от точки до этой прямой равно d = 3
5
совпадает с длиной стороны квадрата.
Площадь квадрата S = d2 = 18/5.
310
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
7.10. Решение.
Система уравнений
x/a + y/b = 1,
x/b + y/a = 1,
при a, b = 0 имеет единственное решение x = y = ab/(a + b).
& ab
ab '
.
,
Следовательно, прямые пересекаются в точке
a+b a+b
7.11. Решение.
Возьмем формулу (7.19) для определения тангенса угла между прямыми, заданными в общей форме. Подставляем в нее значения A1 = 3,
B1 = 5, A2 = −2 и B2 = 1 и получаем:
tg α =
A2 B1 − A1 B2
= 13.
A1 A2 + B 1 B 2
Следовательно, угол между прямыми α = arctg 13.
7.12. Решение.
Рассмотрим систему уравнений
λx + 6y = 2,
2x + 3y = μ.
Методом окаймляющих миноров (см. с. 83) находим ранги матрицы
системы и расширенной матрицы:
λ 6
1, если λ = 4,
rk
=
2, если λ = 4;
2 3
rk
λ 6 2
2 3 μ
= rk
1 6
2
0 0 μ−4
=
1, если μ = 1,
2, если μ = 1.
Следовательно:
а) при λ = 4, μ = 1 система имеет единственное решение, и прямые
пересекаются ровно в одной точке;
б) при λ = 4, μ = 1 система имеет бесконечное множество решений,
и прямые совпадают;
в) при λ = 4, μ = 1 система не имеет решений, и прямые параллельны.
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
311
7.13. Решение.
Определим отклонение каждой из прямых от начала координат:
δ1 = − √
1
1
Csgn(C), δ2 = − √
C sgn(C ).
2
2
2
2
A +B
A +B
Тогда, как легко видеть, расстояние d между параллельными плоскостями будет равно абсолютной величине разности отклонений:
d = abs(δ1 − δ2 ) = abs − √
1
1
Csgn(C) + √
C sgn(C ) =
A2 + B 2
A2 + B 2
abs(C − C)
= √
.
A2 + B 2
7.14. Ответ: критерием пересечения n прямых в одной точке является равенство рангов двух матриц:
⎡
⎤ ⎡
⎤
A1 B1
A1 B 1 C1
⎢
⎥ ⎢
⎥
⎢ A2 B2 ⎥ ⎢ A2 B2 C2 ⎥
⎥ и ⎢
⎥
⎢
⎢. . . . . . .⎥ ⎢. . . . . . . . . . .⎥ .
⎣
⎦ ⎣
⎦
An Bn
An B n C n
7.15. Решение.
Уравнение прямой L∗ , проходящей через точку T (x0 , y0 ), имеет вид
y − y0 = k(x − x0 ). В этом уравнении k — неизвестный угловой коэффициент.
Для определения величины k воспользуемся ее свойством: k = tg α∗ ,
где α∗ — угол наклона L∗ по отношению к оси абсцисс.
Поскольку L∗ проходит под углом Δα к прямой L, то возникают два
варианта: α∗ = α − Δα и α∗ = α + Δα. Запишем эти уравнения в виде
единого равенства:
α∗ = α ± Δα.
По формулам тангенса суммы и разности двух углов (B.13) и (B.14)
на с. 426 имеем:
k = tg(α ± Δα) =
tg α ± tg Δα
.
1 ∓ tg Δα tg α
Окончательно получаем уравнение прямой L∗ :
y − y0 =
tg α ± tg Δα
(x − x0 ).
1 ∓ tg Δα tg α
312
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
7.16. Ответ:
A B A B 2 2
3 3
а) (A1 x + B1 y + C1 ) = (A2 x + B2 y + C2 ) ;
A3 B 3 A1 B 1 б) (A1 x + B1 y + C1 )(A2 A3 + B2 B3 ) = (A2 x + B2 y + C2 )(A1 A3 + B1 B3 );
A1 x + B 1 y + C 1
A2 x + B2 y + C2
/
/
в)
=
−s
,
2 + B2
2 + B2
A
A
1
2
1
2
+
*
A B A B 1 1 2 2
где s = sgn .
A3 B3 A3 B3 7.17. Решение.
Обозначим точки пересечения прямой Ax + By + C = 0 с осями
C
C
координат через P (x0 , 0) и Q(0, y0 ), где x0 = − , y0 = − . Координаты
A
B
x0 и y0 по абсолютной величине равны длинам катетов прямоугольного
треугольника P OQ, лежащим на осях Ox и Oy соответственно. Площадь
этого треугольника равна половине произведения катетов:
1 & C '& C '
C2
1
−
−
=
.
S = x0 y0 =
2
2
A
B
2AB
7.18. Решение.
Запишем уравнение прямой, проходящей через точку (x0 , y0 ): y −y0 =
= k(x − x0 ), где k < ∞ — угловой коэффициент.
Случай k → ∞ не требует отдельного рассмотрения, поскольку тогда
прямая не будет отсекать от координатного угла треугольник.
Найдем координаты точек пересечения прямой с осями координат:
y0
с осью Ox: y = 0, −y0 = k(x∗ − x0 ), x∗ = x0 − , причем abs(x∗ ) —
k
длина катета, лежащего на оси Ox;
c осью Oy: x = 0, y ∗ − y0 = −kx0 , y ∗ = y0 − kx0 , причем abs(y ∗ ) —
длина катета, лежащего на оси Oy.
Площадь такого треугольника равна половине произведения катетов:
y0 1 (y0 − kx0 )2 1
1
(y0 − kx0 ) = abs
.
S = abs(x∗ y ∗ ), S = x0 −
2
2
k
2
−k
Выразим величину k:
k 2 x20 − 2k(x0 y0 − S) + y02 = 0. Решение этого квадратного уравнения
приводит к двум возможным
значениям k:
/
x0 y0 − S ± S(S − 2x0 y0 )
.
k1,2 =
x20
Получаем искомое уравнение прямой:
+
*
/
x0 y0 − S ± S(S − 2x0 y0 )
y − y0 =
(x − x0 ).
x20
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
313
7.19. Решение.
Как показано в предыдущем упражнении, площадь треугольника S
зависит от углового коэффициента прямой k следующим образом: S(k) =
1 & (y0 − kx0 )2 '
= abs
.
2
−k
Для точек T (x0 , y0 ), координаты которых x0 и y0 положительны, выполняется равенство k < 0, т. е. прямая в этом случае образует тупой
угол с осью Ox.
Для определения минимального значения функции вычислим точки,
d S(k) y02 − k 2 x20
=
.
в которых равна нулю производная
dk
k2
y
0
Условию k < 0 отвечает значение k ∗ = − . Точка k ∗ является точx0
d2 S(k ∗ )
2y 2
кой минимума, поскольку вторая производная
= − ∗ 0 3 > 0.
dk
(k )
Таким образом, наименьшее возможное значение площади треугольника равно
Smin = S(k ∗ ) = 2x0 y0 .
7.20. Решение.
Вычислим координаты точек пересечения пар прямых. Учитывая,
что площадь треугольника выражается в виде половины модуля векторного произведения векторов, образующих две стороны, получим:
α3 γ1 − α1 γ3 '
β1 γ2 − β2 γ1 & α2 γ3 − α3 γ2
+
−
α1 β2 − α2 β1 α3 β2 − α2 β3 α1 β3 − α3 β1
β2 γ3 − β3 γ2 & α3 γ1 − α1 γ3
α1 γ2 − α2 γ1 '
+
−
+
α2 β3 − α3 β2 α1 β3 − α3 β1 α2 β1 − α1 β2
β3 γ1 − β1 γ3 & α1 γ2 − α2 γ1
α2 γ3 − α3 γ2 '
+
−
.
α3 β1 − α1 β3 α2 β1 − α1 β2 α3 β2 − α2 β3
S=
Приведем дроби к общему знаменателю. После простых, но несколько
громоздких алгебраических преобразований приходим к формуле
S=
(α1 (β2 γ3 − β3 γ2 ) + α2 (β3 γ1 − β1 γ3 ) + α3 (β1 γ2 − β2 γ1 ))2
.
(α1 β2 − α2 β1 )(α2 β3 − α3 β2 )(α3 β1 − α1 β3 )
Как несложно видеть, полученное выражение может быть представлено как
Δ2
1
,
S=
2 abs(Δ1 Δ2 Δ3 )
314
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
α1 β1 γ1 где Δ = α2 β2 γ2 , Δi — алгебраические дополнения элементов γi ,
α3 β3 γ3 i ∈ {1, 2, 3}.
7.21. Решение.
Проведем через точки T1 и T2 прямую (см. формулу (7.12)). Угловой
коэффициент этой прямой k = 1/2. Далее, прямая T1 T3 имеет угловой
коэффициент k = 1/2. Поскольку k = k , то точки T1 , T2 и T3 лежат на
одной прямой.
7.22. Решение.
Первый способ
Пусть уравнение прямой, проходящей через три точки T1 , T2 и T3 ,
имеет вид y = kx + b. Подставив координаты каждой из этих точек в
уравнение прямой, получим систему относительно неизвестных величин
k и⎧
b:
⎪
b = 1,
⎪
⎨
ak + b = 2,
⎪
⎪
⎩ 3k + b = a.
Условие определенности этой системы (т. е. единственности ее решения) приводит к квадратному уравнению a2 − a − 3 = 0.
Следовательно, точки T1 , T2 и T3 лежат на одной прямой при двух
√
√
1
1
значениях параметра a: a1 = (1 + 13) и a2 = (1 − 13).
2
2
Второй способ
Воспользуемся следствием формулы (7.44) из упр. 7.4: критерием
принадлежности трех точек одной прямой является равенство нулю определителя третьего порядка:
0 1 1
a 2 1 = 0.
3 a 1
√
1
Полученное уравнение имеет два корня: a1,2 = (1 ± 13).
2
Примечание. Необходимым и достаточным условием того, что три
точки T1 , T2 и T3 лежат на одной прямой, является коллинеарность век−−→ −−→
торов T1 T2 и T1 T3 . В силу этого существует еще один способ решения
этого упражнения, основанный на проверке равенства нулю векторного
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
315
−−→ −−→
произведения T1 T2 × T1 T3 . Конечно, разные способы решения приводят
к одинаковому ответу.
7.23. Решение.
Угловой коэффициент искомой прямой совпадает с угловым коэф1
фициентом прямой BC. Уравнение прямой BC имеет вид y = x + 3
2
(см. формулу (7.12)). Далее воспользуемся формулой (7.10) для прямой,
проходящей через заданную точку:
y − y1 = k(x − x1 ),
(7.46)
1
где k = , x1 = 1, y1 = −1.
2
Подставляя численные значения, получаем уравнение прямой, проходящей через вершину A параллельно стороне BC: x − 2y − 3 = 0.
7.24. Ответ. x + y − 5 = 0.
7.25. Решение.
Поскольку точка N лежит на оси ординат, то ее координаты равны
(0, y), где y — неизвестная величина. Расстояние d между точками N и
N равно
/
/
d = (0 − (−2))2 + (y − (−5/2))2 = 4 + (y + 5/2)2 .
Таким образом, получаем уравнение относительно переменной y:
/
√
(0 − (−2))2 + (y − (−5/2))2 = 2 2,
которое имеет решения y1 = −1/2 и y2 = −9/2. Следовательно, координаты точки N равны (0, −1/2) или (0, −9/2).
7.26. Решение.
По формуле площади треугольника, выраженной через координаты
его вершин (1, 1), (−2, −3) и (x, 0) (см. (7.44) на с. 304), получим: S =
= abs(4x − 1).
Согласно условию задачи, S = 6, отсюда abs(4x − 1) = 13/4.
Следовательно, координаты третьей вершины треугольника равны
(−5/4, 0) или (7/4, 0).
7.27. Решение.
Координаты третьей вершины: (0, y).
316
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
Площадь треугольника равна
−2 3 1
1
1
S = abs −7 −1 1 = abs(23 − 5y) = 10,
2
2
0 y 1
отсюда y = 13/5 или y = 33/5.
Координаты третьей вершины треугольника равны (0, 13/5) или
(0, 33/5).
7.28. Решение.
Пусть A(0, 2), B(2, −8). Искомая проекция точки K(2, −13).
Проекция точки есть основание перпендикуляра, построенного к прямой AB. Тогда выполняется свойство ортогональности для прямой AB
и перпендикуляра из точки K: k1 · k2 = −1.
Запишем систему уравнений относительно коэффициентов k1 и b1 для
прямой
AB:
2 = b1 ,
8 = 2k1 + b1 ,
Из этой системы получим, что b1 = 2, k1 = −5. Тогда k2 = 1/5.
Подставим k2 в уравнение прямой для перпендикуляра из точки K:
−13 = 2 · 1/5 + b2 , отсюда b2 = −67/5.
Вычисляем координаты точки (x0 , y0 ), в которой пересекаются прямые:
1/5x0 − 67/5 = −5x0 + 2, x0 = 77/26, y0 = −333/26.
7.29. Решение.
Пусть A(1, 2a), B(2, 3a), K(a, a).
Проекция точки есть основание перпендикуляра к прямой AB. Тогда
выполняется равенство для прямой AB и перпендикуляра из точки K:
k1 · k2 = −1.
Запишем систему уравнений относительно коэффициентов k1 и b1 для
прямой
AB:
2a = k1 + b1 ,
3a = 2k1 + b1 .
Из этой системы получим, что b1 = a, k1 = a. Тогда k2 = −1/a.
Подставим k2 в уравнение прямой для перпендикуляра, проведенного
из точки K:
a = a(−1/a) + b2 , отсюда b2 = a + 1.
Координата проекции точки K удовлетворяет уравнению:
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
317
ax0 + a = −1/ax0 + b2 , ax0 + a = −x0 /a + a + 1, x0 (a + 1/a) = 1,
a
.
x0 = 2
a +1
a
1
+a+1=a+ 2
.
Выразим ординату проекции: y0 = − 2
a+ 1
a + 1
a
a
,a + 2
.
Искомая проекция имеет координаты
2
a +1
a +1
7.30. Решение.
Предлагаемое решение, в общем, повторяет подход, рассмотренный в
примере 7.5. Отметим, что для изучения полного набора возможных случаев взаиморасположения концов отрезков и координатных осей дополнительно используется целочисленная переменная neighbour. Она играет важную роль при расположении отрезка, проиллюстрированном на
рис. 7.8. Здесь один из концов отрезка, а именно P2 , расположен на оси
координат, и в переменную neighbour будет записан номер четверти, в
которой лежат точки отрезка из малой окрестности P2 .
y
II
I
P2
x
O
P1
III
IV
Рис. 7.8. К упр. 7.30. Отрезок P1 P2 лежит во второй и третьей четвертях,
get_quadrant(p1) = 3, get_quadrant(p2) = 0, neighbour = 2
После выполнения всех проверок в ответ будут записаны номера тех
координатных четвертей, в которые попадают точки отрезка.
class Point:
318
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
def __init__(self, x, y):
self.x = x
self.y = y
def get_quadrant(p):
if p.x > 0 and p.y >
return 1
elif p.x < 0 and p.y
return 2
elif p.x < 0 and p.y
return 3
elif p.x > 0 and p.y
return 4
else:
return 0
0:
> 0:
< 0:
< 0:
def get_quadrants_general(p1, p2):
p1_quad = get_quadrant(p1)
p2_quad = get_quadrant(p2)
is_adjacent = abs(p1_quad - p2_quad) % 2 == 1
if p1_quad == 0 and p2_quad == 0:
mid = Point((p1.x + p2.x) / 2, (p1.y + p2.y) / 2)
mid_quad = get_quadrant(mid)
return [] if mid_quad == 0 else [mid_quad]
elif p1_quad == 0:
if p1.x * p2.x < 0:
neighbour = 3 - p2_quad \
if p2_quad <= 2 else 7 - p2_quad
return [p2_quad, neighbour]
if p1.y * p2.y < 0:
neighbour = 5 - p2_quad
return [p2_quad, neighbour]
ГЛАВА 7. УРАВНЕНИЕ ПРЯМОЙ НА ПЛОСКОСТИ
return [p2_quad]
elif p2_quad == 0:
if p1.x * p2.x < 0:
neighbour = 3 - p1_quad if p1_quad <= 2 \
else 7 - p1_quad
return [p1_quad, neighbour]
if p1.y * p2.y < 0:
neighbour = 7 - p1_quad
return [p1_quad, neighbour]
return [p1_quad]
elif is_adjacent:
return [p1_quad, p2_quad]
elif p1_quad == p2_quad:
return [p1_quad]
else:
b = (p1.y * p2.x - p1.x * p2.y) \
/ (p2.x - p1.x)
if b == 0:
return [p1_quad, p2_quad]
elif p1_quad == 1 or p2_quad == 3:
quadrant = 2 if b > 0 else 4
return [p1_quad, p2_quad, quadrant]
else:
quadrant = 1 if b > 0 else 3
return [p1_quad, p2_quad, quadrant]
319
Глава 8
Уравнение плоскости
в пространстве
8.1.
Уравнение плоскости, ортогональной
заданному вектору и проходящей через
заданную точку
Пусть известно, что плоскость π ортогональна вектору n = (A, B, C)
и проходит через точку T0 (x0 , y0 , z0 ). Возьмем произвольную точку T (x, y,
−−→
z) на плоскости π. Вектор T0 T принадлежит плоскости π. Из условия ортогональности вектора n плоскости π следует, что вектор
−−→
T0 T = (x − x0 , y − y0 , z − z0 )
(8.1)
ортогонален вектору n.
Опираясь на свойство скалярного произведения ортогональных векторов, можно записать:
−−→
(8.2)
n · T0 T = 0.
Это уравнение называется векторным уравнением плоскости [38].
Переписанное в координатном виде
A(x − x0 ) + B(y − y0 ) + C(z − z0 ) = 0,
(8.3)
такое уравнение называется уравнением плоскости, ортогональной
вектору n = (A, B, C) и проходящей через точку T0 (x0 , y0 , z0 ).
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
8.2.
321
Общее уравнение плоскости
Уравнение первой степени
Ax + By + Cz + D = 0,
(8.4)
в котором A, B, C и D — произвольные вещественные постоянные, такие, что из коэффициентов A, B и C хотя бы один отличен от нуля,
называется общим уравнением плоскости.
Общее уравнение (8.4) называется полным, если все его коэффициенты отличны от нуля. Если хотя бы один из указанных коэффициентов
равен нулю, то уравнение называется неполным.
Рассмотрим возможные виды неполных уравнений.
1) Если D = 0, то уравнение Ax + By + Cz = 0 определяет плоскость,
проходящую через начало координат.
2) Если A = 0, то уравнение By + Cz + D = 0 определяет плоскость,
параллельную оси Ox, так как нормальный вектор этой плоскости n =
= (0, B, C) перпендикулярен оси Ox.
3) Если B = 0, то уравнение Ax + Cz + D = 0 определяет плоскость,
параллельную оси Oy, так как ее нормальный вектор n = (A, 0, C) перпендикулярен оси Oy.
4) Если C = 0, то уравнение Ax + By + D = 0 определяет плоскость,
параллельную оси Oz, так как этой оси перпендикулярен нормальный
вектор с координатами (A, B, 0).
5) Если A = B = 0, то уравнение Cz + D = 0 определяет плоскость,
параллельную координатной плоскости xOy.
6) Если A = 0 и C = 0, то уравнение By + D = 0 определяет плоскость, параллельную координатной плоскости xOz.
7) Если B = 0 и C = 0, то уравнение Ax + D = 0 определяет плоскость, параллельную координатной плоскости yOz.
8) Если A = 0, B = 0 и D = 0, то уравнение плоскости Cz = 0
определяет координатную плоскость xOy.
9) Если A = 0, C = 0 и D = 0, то уравнение плоскости By = 0
определяет координатную плоскость xOz.
10) Если B = 0, C = 0 и D = 0, то уравнение плоскости Ax = 0
определяет координатную плоскость yOz.
8.3.
Уравнение плоскости в отрезках
Рассмотрим общее уравнение плоскости Ax + By + Cz + D = 0.
322
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
Пусть все коэффициенты A, B, C и D отличны от нуля. Тогда это
уравнение может быть записано в виде:
y
z
x
= 1.
(8.5)
+
+
(−D/A) (−D/B) (−D/C)
D
D
D
Введем обозначения: a = − , b = − , c = − . Тогда уравнение (8.5)
A
B
C
будет приведено к следующему виду:
x y z
+ + = 1.
(8.6)
a b c
Это и будет уравнением плоскости в отрезках.
В уравнении (8.6) числа a, b и c имеют простой геометрический смысл:
по модулю они равны длинам отрезков, которые плоскость отсекает на
координатных осях Ox, Oy и Oz соответственно (см. рис. 8.1). Плоскость
проходит через точки (a, 0, 0), (0, b, 0), (0, 0, c).
z
c
b
x
a
y
Рис. 8.1. Отрезки, отсекаемые плоскостью на осях координат
8.4.
Нормальное уравнение плоскости
Рассмотрим плоскость, изображенную на рис. 8.2.
−→
Пусть p — длина вектора OP , α, β, γ — углы между единичным вектором n и координатными осями, Q — произвольная точка на плоскости
с координатами (x, y, z).
−→
Очевидно, что проекция вектора OQ на направление n равна p:
−→
Prn OQ = p,
(8.7)
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
323
z
y
n
P
Q(x, y, z)
O
x
Рис. 8.2. К выводу нормального уравнения плоскости
−→
−→ OQ · n
,
Prn OQ =
|n|
|n| = 1.
(8.8)
Следовательно:
−→
OQ · n = x cos α + y cos β + z cos γ = p.
(8.9)
Получено нормальное уравнение плоскости. Величины cos α, cos β,
cos γ называются направляющими косинусами вектора n.
Возьмем общее уравнение плоскости
Ax + By + Cz + D = 0,
(8.10)
где D = 0.
Нормирующий множитель вычисляется по формуле:
μ = −√
1
sgn(D)
A2 + B 2 + C 2
(8.11)
(ср. с формулой (7.32)).
Если умножить (8.10) на нормирующий множитель μ, то в результате
получится нормальное уравнение плоскости:
μ(Ax + By + Cz + D) = 0.
(8.12)
Примечание. Если выполняется условие D = 0, то плоскость проходит через начало координат и нормирующий множитель можно взять с
1
.
произвольным знаком: μ = ± √
A2 + B 2 + C 2
324
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
8.5.
Уравнение плоскости, проходящей
через заданную точку параллельно
двум заданным векторам
Пусть плоскость π параллельна векторам a1 = (k1 , l1 , m1 ) и a2 =
= (k2 , l2 , m2 ) и проходит через точку T0 (x0 , y0 , z0 ). Далее, пусть T (x, y, z)—
−−→
произвольная точка плоскости. Тогда векторы a1 , a2 и T0 T компланарны. Следовательно,
−−→
(8.13)
(T0 T × a1 ) · a2 = 0,
x − x 0 y − y 0 z − z 0 k1
(8.14)
l1
m1 = 0
k2
l2
m2 или
l m k m k l 1
1
1
1
1 1
(x − x0 ) − (y − y0 ) + (z − z0 ) = 0.
l 2 m2 k2 m 2 k2 l 2 (8.15)
После раскрытия определителей второго порядка вводим соответствующие обозначения и получаем общее уравнение плоскости.
8.6.
Уравнение плоскости, проходящей
через три заданные точки
Пусть даны следующие точки:T1 (x1 , y1 , z1 ), T2 (x2 , y2 , z2 ) и T3 (x3 , y3 , z3 ).
−−→ −−→
Возьмем произвольную точку T (x, y, z) и построим векторы T1 T , T1 T2 и
−−→
T1 T3 . Они компланарны, следовательно:
x − x1 y − y 1 z − z 1 x2 − x1 y2 − y1 z2 − z1 = 0.
(8.16)
x 3 − x 1 y 3 − y 1 z 3 − z 1 Полученное уравнение, выражающее равенство нулю определителя,
является уравнением плоскости, проходящей через три заданные точки.
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
8.7.
325
Угол между двумя плоскостями
Рассмотрим плоскости, заданные уравнениями:
A1 x + B1 y + C1 z + D1 = 0,
(8.17)
A2 x + B2 y + C2 z + D2 = 0.
(8.18)
Для данных плоскостей построим нормальные векторы n1 = (A1 , B1 ,
C1 ) и n2 = (A2 , B2 , C2 ). Следовательно, угол ω между плоскостями будет
определяться из соотношения:
cos ω =
A1 A2 + B1 B2 + C1 C2
n1 · n2
/
=/ 2
.
|n1 ||n2 |
A1 + B12 + C12 A22 + B22 + C22
(8.19)
Если n1 · n2 = 0, то векторы n1 и n2 ортогональны. Отсюда
A 1 A2 + B 1 B 2 + C 1 C 2 = 0
(8.20)
есть условие ортогональности плоскостей.
A1
B1
C1
Если же выполняются равенства
=
=
, то векторы n1 и n2
A2
B2
C2
коллинеарны, и это будет условием параллельности плоскостей.
8.8.
Расстояние от точки до плоскости
Понятие отклонения точки T0 (x0 , y0 , z0 ) от плоскости Ax + By +
+Cz + D = 0 вводится аналогично соотношению (7.37):
δ = −sgn(D)
Ax0 + By0 + Cz0 + D
√
.
A2 + B 2 + C 2
(8.21)
Расстояние d от точки T0 до плоскости определяется как абсолютная величина отклонения d = abs(δ).
Если плоскость задана в нормальном виде, то расстояние d определяется как:
d = abs(cos α · x0 + cos β · y0 + cos γ · z0 − p),
где cos α, cos β, cos γ — направляющие косинусы.
(8.22)
326
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
8.9.
Пучок плоскостей
Пусть две плоскости заданы уравнениями:
A1 x + B1 y + C1 z + D1 = 0,
A2 x + B2 y + C2 z + D2 = 0.
(8.23)
Если эти плоскости не параллельны и не совпадают, то они пересекаются
по какой-либо прямой.
Очевидно, что для любых вещественных констант λ и μ плоскость,
определяемая уравнением
λ(A1 x + B1 y + C1 z + D1 ) + μ(A2 x + B2 y + C2 z + D2 ) = 0,
(8.24)
также будет проходить через эту прямую, т. к. все точки, подчиняющиеся
уравнениям (8.23), удовлетворяют и уравнению (8.24). Это же уравнение
задает все плоскости, проходящие через общую прямую.
Совокупность плоскостей, проходящих через одну и ту же прямую,
называется пучком плоскостей (pencil of planes).
Пример 8.1. Найдем уравнение плоскости, проходящей через точку
T (4, −1, 2) и прямую, которая является пересечением плоскостей x+3y−
−z − 5 = 0 и −2x + y + z + 4 = 0.
Решение. Запишем уравнение пучка плоскостей и подберем λ и μ так,
чтобы необходимая плоскость проходила через точку T :
λ(x + 3y − z − 5) + μ(−2x + y + z + 4) = 0,
λ(4 + 3 · (−1) − 2 − 5) + μ(−2 · 4 + (−1) + 2 + 4) = 0,
(8.25)
(8.26)
− 6λ − 3μ = 0,
(8.27)
2λ + μ = 0.
(8.28)
Например, возьмем значения λ = 1 и μ = −2. В этом случае получаем
ответ:
(x + 3y − z − 5) + (−2)(−2x + y + z + 4) = 0, или
5x + y − 3z − 13 = 0.
(8.29)
(8.30)
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
327
Контрольные вопросы к главе «Уравнение
плоскости в пространстве»
1. Запишите уравнение плоскости, ортогональной заданному вектору
и проходящей через заданную точку.
2. Как определяется общее уравнение плоскости?
3. Запишите уравнение плоскости в отрезках.
4. Для решения какой задачи удобно использовать нормальное уравнение плоскости?
5. Как вычислить направляющие косинусы вектора a?
6. Запишите уравнение плоскости, проходящей через заданную точку
параллельно двум заданным векторам.
7. Запишите уравнение плоскости, проходящей через три заданные
точки.
8. Как вычислить угол между двумя плоскостями?
9. Дайте определение отклонения произвольной точки от данной плоскости.
10. Что такое пучок плоскостей?
Задачи для самостоятельного решения
8.1. Составьте уравнение плоскости, проходящей через начало координат, если она имеет нормальный вектор n = (1, 2, −3).
8.2. Составьте уравнение плоскости, проходящей через точку T (−1, 0, 2)
и обладающей нормальным вектором n = (−3, −2, 0).
8.3. Найдите уравнение плоскости, проходящей через точки T1 (2, −1, 0)
и T2 (−5, 1, 1) параллельно вектору a = (0, −1, −7).
8.4. Найдите уравнение плоскости, проходящей через точку T0 (2, −1, 0)
параллельно векторам a1 = (3, 5, −8) и a2 = (4, 6, −7).
8.5. Найдите уравнение плоскости, проходящей через точку T0 (1/2, 1/2,
1/2) параллельно векторам a1 = (0, 1, −1) и a2 = (1, 1, 10).
328
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
8.6. Найдите длины отрезков, отсекаемых плоскостью 3x+4y+5z−12 =
= 0 на координатных осях.
8.7. Чему равно расстояние от точки A(1, 2, 9) до плоскости x+y −2z −
−17 = 0?
8.8. Пересекает ли плоскость −2x + 2y − z − 1 = 0 отрезок P1 P2 , если
координаты концов отрезка следующие: P1 (−5, −5, −5), P2 (8, 8, 8)?
8.9. Вычислите расстояние между параллельными плоскостями, заданными уравнениями Ax + By + Cz + D = 0 и Ax + By + Cz + D = 0,
где D = D .
∗ 8.10. При каком условии три плоскости A1 x + B1 y + C1 z + D1 = 0, A2 x +
+B2 y + C2 z + D2 = 0 и A3 x + B3 y + C3 z + D3 = 0 пересекаются
ровно в одной точке? Определите координаты этой точки.
8.11. Вычислите объем тетраэдра, отсекаемого плоскостью Ax + By +
+Cz + D = 0 от координатного угла.
8.12. На оси Oz найдите точки, равноудаленные от двух плоскостей x −
−y + z − 10 = 0 и x + y − z + 8 = 0.
∗ 8.13. Вычислите объем тетраэдра, вершины которого находятся в точках
с координатами (x1 , y1 , z1 ), (x2 , y2 , z2 ), (x3 , y3 , z3 ) и (x4 , y4 , z4 ).
Ответы и решения к главе «Уравнение
плоскости в пространстве»
8.1. Решение.
Воспользуемся формулой (8.3), выражающей уравнение плоскости,
проходящей через точку A0 (x0 , y0 , z0 ) перпендикулярно вектору n =
= (n1 , n2 , n3 ):
n1 (x − x0 ) + n2 (y − y0 ) + n3 (z − z0 ) = 0.
Подставим координаты точки O(0, 0, 0): (x−0)+2(y−0)−3(z−0) = 0.
Значит, уравнение искомой плоскости имеет вид x + 2y − 3z = 0.
8.2. Решение.
Подставим в формулу (8.3) координаты точки T (−1, 0, 2) и вектора
n = (−3, −2, 0), получим уравнение плоскости:
(−3)(x − (−1)) + (−2)(y − 0) + 0(z − 2) = 0,
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
329
или
3x + 2y + 3 = 0.
8.3. Решение.
Выберем произвольную точку T (x, y, z) на искомой плоскости. Со−−→ −−→
гласно условию задачи векторы T1 T , T1 T2 и a являются компланарными,
следовательно, их смешанное произведение равно нулю:
−−→ −−→
(T1 T , T1 T2 , a) = 0.
Воспользуемся формулой (6.33):
x − 2 y + 1 z −−→ −−→
(T1 T , T1 T2 , a) = −7
2
1 = −13x − 49y + 7z − 23 = 0.
0
−1 7
Значит, уравнение плоскости, проходящей через точки T1 и T2 параллельно вектору a можно представить в виде 13x + 49y − 7z + 23 = 0.
8.4. Решение.
Рассмотрим произвольную точку T (x, y, z) на искомой плоскости.
−−→
Смешанное произведение (a1 , a2 , T1 T ) равно нулю в силу компланарности этих трех векторов.
Вычислив смешанное произведение, получим
5
−8
3
−−→
(a1 , a2 , T0 T ) = 4
6
−7 = 13x − 11y − 2z − 37 = 0.
x − 2 y + 1 z Значит, уравнение плоскости, проходящей через точку T0 параллельно
векторам a1 и a2 , можно представить в виде 13x − 11y − 2z − 37 = 0.
8.5. Решение.
Используя вспомогательную точку T с координатами T (x, y, z), аналогично решению предыдущей задачи получаем:
−−→
(a1 , a2 , T0 T ) = 0,
0
1
−1 1
1
10 = 11x − y − z − 9 = 0.
2
1
1
1
x −
y−
z− 2
2
2
330
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
В итоге уравнение плоскости, проходящей через точку T0 параллельно
векторам a1 и a2 , имеет вид 22x − 2y − 2z − 9 = 0.
8.6. Решение.
Пусть задано общее уравнение плоскости Ax + By + Cz + D = 0,
причем D = 0. Перейдем к уравнению плоскости в отрезках, поделив
обе части уравнения на −D:
−
B
C
A
x − y − z = 1.
D
D
D
D
D
D
Величины a = − , b = − и c = − по модулю равны длинам отрезA
B
C
ков, отсекаемым плоскостью на координатных осях Ox, Oy и Oz соответственно (см. формулу (8.6)).
Подставив значения коэффициентов A = 3, B = 4, C = 5, D = −12,
12
получим: a = 4, b = 3, c = .
5
8.7. Решение.
Запишем уравнение плоскости в нормальной форме:
1
1
/
(x + y − 2z − 17) = √ (x + y − 2z − 17) = 0.
2
2
2
6
1 + 1 + (−2)
Подставим координаты точки из условия задачи в нормальное уравнение
и найдем расстояние от этой точки до плоскости:
1
32
d = abs √ (1 + 2 − 18 − 17) = √ .
6
6
8.8. Решение.
Плоскость делит пространство на две части: −2x + 2y − z − 1 > 0 и
−2x + 2y − z − 1 < 0. Если два конца отрезка находятся в разных частях
пространства, то, очевидно, отрезок пересекает плоскость. Подставим
координаты точек из условия задачи:
−2 · (−5) + 2 · (−5) − (−5) − 1 = 4 > 0,
−2 · 8 + 2 · 8 − 8 − 1 = −9 < 0.
Следовательно, точки P1 и P2 находятся по разные стороны от плоскости,
и отрезок P1 P2 пересекает плоскость −2x + 2y − z − 1 = 0.
Powered by TCPDF (www.tcpdf.org)
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
331
8.9. Решение.
Определим отклонение каждой из плоскостей от начала координат:
1
1
δ1 = − √
Dsgn(D), δ2 = − √
D sgn(D ).
2
2
2
2
2
2
A +B +C
A +B +C
Тогда расстояние d между параллельными плоскостями будет равно
абсолютной величине разности отклонений:
d = abs(δ1 − δ2 ) =
1
1
Dsgn(D) + √
D sgn(D ) =
= abs − √
A2 + B 2 + C 2
A2 + B 2 + C 2
abs(D − D)
=√
.
A2 + B 2 + C 2
8.10. Ответ:
Условием пересечения трех плоскостей в одной точке является отличие от нуля определителя:
A
B
C
1 1 1
Δ1 = A2 B2 C2 = 0.
A3 B3 C3 Координаты (xP , yP , zP ) точки пересечения этих плоскостей равны
D1 B1 C1 A1 D1 C1 A1 B1 D1 1
1
1
xP = − D2 B2 C2 , yP = − A2 D2 C2 , zP = − A2 B2 D2 .
Δ
Δ
Δ
D3 B3 C3 A3 D3 C3 A 3 B 3 D3 Заметим,
⎡ что если⎤Δ = 0 и хотя бы один минор второго порядка
A B C
⎢ 1 1 1⎥
⎢
матрицы ⎣A2 B2 C2 ⎥
⎦ отличен от нуля, то все плоскости параллельны
A3 B 3 C 3
одной прямой. Если же все миноры второго порядка нулевые, то плоскости имеют общую прямую.
8.11. Решение.
Перейдем к уравнению плоскости в отрезках:
B
C
A
x − y − z = 1,
D
D
D
D
D
D
− = a, − = b, − = c,
A
B
C
−
332
ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
где a, b и c по абсолютной величине равны длинам отрезков, отсекаемых
на координатных осях плоскостью и совпадающих с ребрами тетраэдра.
Объем тетраэдра Vtetr и объем параллелепипеда Vpar связаны следующим
соотношением:
1
Vtetr = Vpar , где Vpar = abs(abc).
6
Подставляем значения a, b и c:
3 D
1
.
Vtetr = abs
6
ABC
8.12. Решение.
Находим нормальные уравнения плоскостей:
1
√ (x − y + z − 10) = 0,
3
1
− √ (x + y − z + 8) = 0.
3
Координаты точки, расположенной на оси Oz, равны (0, 0, z0 ), где z0 ∈ R.
Чтобы найти расстояние от этой точки до плоскости, подставим координаты в уравнение (8.22):
⎧
abs(z0 − 10)
⎪
⎪
√
= d1 ,
⎨
3
abs(−z0 + 8)
⎪
⎪
√
= d2 .
⎩
3
Приравняем расстояния:
abs(z0 − 10) = abs(−z0 + 8) ⇒ z0 = 9.
Итак, условию задачи удовлетворяет точка с координатами (0, 0, 9).
8.13. Решение.
Обозначим вершины тетраэдра (xi , yi , zi ) через Ai соответственно
(i = 1, 2, 3, 4). Объем тетраэдра равен одной шестой части абсолютной
−−−→ −−−→ −−−→
величины смешанного произведения (A1 A2 , A1 A3 , A1 A4 ):
x2 − x1 y2 − y1 z2 − z1 −−−→ −−−→ −−−→
1
1
V = abs(A1 A2 , A1 A3 , A1 A4 ) = abs x3 − x1 y3 − y1 z3 − z1 .
6
6
x 4 − x 1 y 4 − y 1 z 4 − z 1 ГЛАВА 8. УРАВНЕНИЕ ПЛОСКОСТИ В ПРОСТРАНСТВЕ
333
Заметим, что это выражение можно переписать в эквивалентном виде:
x y z 1
1 1 1 x2 y2 z2 1
1
.
V = abs 6
y
z
1
x
3 3 3 x4 y4 z4 1
Глава 9
Уравнение прямой
в пространстве
9.1.
Уравнение прямой, проходящей через
заданную точку параллельно
заданному вектору
Пусть прямая L проходит через точку T0 (x0 , y0 , z0 ) параллельно вектору a = (k, l, m). Возьмем произвольную точку T (x, y, z) на прямой и
−−→
составим вектор T0 T = (x − x0 , y − y0 , z − z0 ), параллельный прямой L и
коллинеарный вектору a. Тогда можно записать уравнение
x − x0
y − y0
z − z0
=
=
.
k
l
m
(9.1)
Это соотношение называется каноническим уравнением прямой,
проходящей через заданную точку параллельно заданному вектору, а вектор a = (k, l, m) — направляющим вектором.
Из канонического уравнения (9.1) можно легко вывести параметрическое уравнение такой прямой:
⎧
⎪
⎪
⎨ x − x0 = ku,
(9.2)
y − y0 = lu,
⎪
⎪
⎩ z − z0 = mu,
где u ∈ R — параметр прямой.
Пример 9.1. Найдем уравнение прямой, которая проходит через точку T (3, −1, 0) перпендикулярно плоскости x − 4y + 7z − 10 = 0.
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
335
Решение. Нормальный вектор плоскости n = (1, −4, 7) в этом случае
будет совпадать с направляющим вектором для прямой:
x−3 y+1 z
=
= .
1
−4
7
(9.3)
Пример 9.2. Найдем каноническое уравнение прямой, которая является пересечением плоскостей, определяемых уравнениями −x − y + z +
+2 = 0 и 2x + 4y − z = 0.
Решение. Прямая ортогональна нормальным векторам каждой из
плоскостей: n1 = (−1, −1, 1), n2 = (2, 4, −1). Следовательно, в качестве
направляющего вектора прямой можно взять a = n1 × n2 .
i j k
a = −1 −1 1 = −3i + j − 2k, a = (−3, 1, −2).
(9.4)
2 4 −1
В качестве координат точки, лежащей на прямой, выбираем любое
решение системы
−x − y + z + 2 = 0,
(9.5)
2x + 4y − z = 0.
Пусть z = 0, тогда
−x − y = −2,
2x + 4y = 0,
⇒ x = 4, y = −2.
(9.6)
В силу этого точка T (4, −2, 0) лежит на прямой.
Следовательно, уравнение искомой прямой имеет вид:
z
x−4 y+2
.
=
=
−3
1
−2
(9.7)
9.2.
Уравнение прямой, проходящей через
две заданные точки
Пусть прямая L проходит через точки T1 (x1 , y1 , z1 ) и T2 (x2 , y2 , z2 ).
−−→
Тогда вектор a = T1 T2 = (x2 − x1 , y2 − y1 , z2 − z1 ) параллелен прямой L,
336
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
и уравнение прямой, проходящей через две заданные точки, в
каноническом виде выглядит следующим образом:
x − x1
y − y1
z − z1
=
=
.
x2 − x1
y2 − y1
z2 − z1
(9.8)
Пример 9.3. Прямая, проходящая через две точки с координатами
(11, 2, −6) и (13, 0, 7), представляется уравнением:
x − 11 y − 2 z + 6
.
=
=
2
−2
13
(9.9)
9.3.
Угол между двумя прямыми
Рассмотрим две прямые
x − x1
y − y1
z − z1
=
=
,
k1
l1
m1
(9.10)
x − x2
y − y2
z − z2
=
=
.
(9.11)
k2
l2
m2
Угол между двумя прямыми ω будет равен углу, образованному
направляющими векторами a1 = (k1 , l1 , m1 ) и a2 = (k2 , l2 , m2 ):
ω = arccos
(a1 · a2 )
k 1 k2 + l 1 l 2 + m 1 m 2
/
= arccos / 2
.
|a1 ||a2 |
k1 + l12 + m21 k22 + l22 + m22
(9.12)
Пример 9.4. Даны прямые:
x−4 y+5 z+1
,
=
=
6
3
−1
(9.13)
x−2 y+6 z+2
.
(9.14)
=
=
2
1
−1
Покажем, что эти прямые компланарны и найдем угол между ними.
Решение.
Необходимым и достаточным условием компланарности прямых яв−−→
ляется равенство нулю смешанного произведения (a1 , a2 , T1 T2 ), где a1 =
= (6, 3, −1), a2 = (2, 1, −1) — направляющие векторы прямых, а точки
T1 и T2 имеют координаты T1 (4, −5, −1), T2 (2, −6, −2).
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
337
−−→
Вычислим (a1 , a2 , T1 T2 ):
6 3 −1
−−→
(a1 , a2 , T1 T2 ) = 2 1 −1 = 0.
−2 −1 −1
(9.15)
Следовательно, прямые компланарны. Угол ω между ними определяется из условия
cos ω = /
8
6 · 2 + 3 · 1 + (−1) · (−1)
/
=√ .
69
62 + 32 + (−1)2 22 + 12 + (−1)2
(9.16)
В результате получаем угол между двумя прямыми
8
ω = arccos √ .
69
(9.17)
9.4.
Угол между прямой и плоскостью
Пусть прямая L и плоскость π пересекаются в некоторой точке и
пусть заданы векторы n = (A, B, C) — нормальный вектор плоскости π,
a = (k, l, m) — направляющий вектор (рис. 9.1).
a
n
T
β
α
π
L
Рис. 9.1. Угол α между прямой и плоскостью
338
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
Если прямая и плоскость образуют угол α, а векторы n и a — угол
π
β, то α + β = . Тогда:
2
&π
'
(n · a)
, cos β = cos
− α = sin α,
(9.18)
cos β =
|n||a|
2
и угол α между прямой и плоскостью определяется из условия:
sin α =
Ak + Bl + Cm
(n · a)
√
=√
.
|n||a|
A2 + B 2 + C 2 k 2 + l 2 + m 2
(9.19)
Условие параллельности прямой L и плоскости π (включающее принадлежность L и π):
Ak + Bl + Cm = 0.
(9.20)
Условие перпендикулярности прямой L и плоскости π:
C
A B
=
= .
k
l
m
c
a
(Здесь равенства вида = понимаются в смысле ad = bc.)
b
d
Получим условие принадлежности прямой
x − x1
y − y1
z − z1
=
=
k
l
m
(9.21)
(9.22)
плоскости Ax + By + Cz + D = 0.
Для этого необходимо и достаточно, чтобы точка T1 (x1 , y1 , z1 ) лежала
на плоскости, и векторы n = (A, B, C) и a = (k, l, m) были перпендикулярны друг другу. В силу этого условие принадлежности прямой
плоскости заключается в выполнении равенств:
Ax1 + By1 + Cz1 + D = 0,
(9.23)
Ak + Bl + Cm = 0.
9.5.
Условие принадлежности двух прямых
одной плоскости
Две прямые:
L1 :
x − x1
y − y1
z − z1
=
=
, проходящая через точку T1 (x1 , y1 , z1 ), и
k1
l1
m1
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
339
x − x2
y − y2
z − z2
=
=
, проходящая через точку T2 (x2 , y2 , z2 ),
k2
l2
m2
в пространстве могут:
1) пересекаться;
2) быть параллельными;
3) скрещиваться.
В первых двух случаях они лежат в одной плоскости. Две прямые,
которые не пересекаются и не параллельны, называются скрещивающимися.
Необходимое и достаточное условие принадлежности прямых L1
и L2 одной плоскости заключается в компланарности векторов a1 =
−−→
= (k1 , l1 , m1 ), a2 = (k2 , l2 , m2 ) и T1 T2 = (x2 − x1 , y2 − y1 , z2 − z1 ), т. е.
должно выполняться равенство нулю определителя:
x2 − x1 y2 − y1 z2 − z1 k1
(9.24)
l1
m1 = 0.
k2
l2
m2 L2 :
Условие параллельности двух прямых:
k1
l1
m1
= =
.
k2
l2
m2
(9.25)
Для пересечения прямых достаточно, чтобы нарушалось хотя бы
одно из равенств (9.25) при выполнении условия (9.24).
Пример 9.5. Найдем уравнение плоскости, проходящей через прямую
x−4 y−8 z+1
=
=
−8
−1
3
(9.26)
и ортогональной плоскости −3x + y + z + 3 = 0.
Решение.
Направляющий вектор данной прямой a = (−8, −1, 3), нормальный
вектор к плоскости n = (−3, 1, 1).
Точка T0 (4, 8, −1) принадлежит искомой плоскости, так как лежит
на прямой (см. рис. 9.2).
Запишем уравнение плоскости, проходящей через точку T и парал−−→
лельной двум векторам a и n (векторы a, n и T0 T компланарны):
x − 4 y − 8 z + 1
−8
= 0,
(9.27)
−1
3
−3
1
1 340
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
T0
T
a
−−→
Рис. 9.2. К примеру 9.5. Взаимное расположение векторов a и T0 T
отсюда:
− 4(x − 4) − (y − 8) − 11(z + 1) = 0.
(9.28)
Таким образом, получаем искомое уравнение плоскости:
4x + y + 11z − 13 = 0.
(9.29)
Пример 9.6. Найдем уравнение плоскости, проходящей через две параллельные прямые:
y − V1
z − W1 x − U2
y − V2
z − W2
x − U1
=
=
=
=
,
,
k
l
m
k
l
m
(9.30)
причем выполняется хотя бы одно из неравенств U1 = U2 , V1 = V2 , W1 =
= W2 .
Решение.
Искомая плоскость проходит через точкиT1 (U1 ,V1 ,W1 ) и T2 (U2 ,V2 ,W2 )
и параллельна направляющему вектору a = (k, l, m). С другой стороны,
−−→
эта плоскость параллельна вектору T1 T2 = (U2 − U1 , V2 − V2 , W2 − W1 ).
Пусть T (x, y, z) — текущая точка плоскости.
−−→
−−→
Запишем условие компланарности векторов T1 T , a и T1 T2 :
x − U1 y − V1 z − W1 k
(9.31)
l
m = 0.
U2 − U1 V2 − V1 W2 − W1 Соотношение (9.31) задает уравнение плоскости, проходящей через
две параллельные прямые.
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
341
Контрольные вопросы к главе «Уравнение
прямой в пространстве»
1. Запишите уравнение прямой, проходящей через заданную точку
параллельно заданному вектору.
2. Как выглядит уравнение прямой в пространстве, проходящей через
две заданные точки?
3. Запишите формулу для вычисления угла между прямыми в пространстве.
4. Как вычислить угол между прямой и плоскостью?
5. Сформулируйте условие параллельности прямой и плоскости.
6. Запишите условие перпендикулярности прямой и плоскости.
7. Какие прямые называются скрещивающимися?
8. Как выглядит условие параллельности двух прямых в пространстве?
Задачи для самостоятельного решения
9.1. Найдите точки пересечения прямой, заданной уравнениями
2x + 4y + z + 9 = 0,
4x − 6y − 2z + 1 = 0,
с координатными плоскостями.
9.2. Найдите уравнение плоскости, проходящей через две параллельные
прямые:
z−1 x y+1 z+1
x−2 y
,
.
= =
=
=
2
3
−3
4
6
−6
9.3. Найдите координаты основания перпендикуляра, опущенного из
точки T (0, 2, −4) на плоскость x + y − z + 3 = 0.
9.4. Установите, являются ли плоскость 8x − 3z + 11 = 0 и прямая
z−1
x−2 y
параллельными?
= =
2
3
8
342
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
9.5. Установите, являются ли плоскость x + 2y − z − 2 = 0 и прямая
x−1 y+1
z
параллельными?
=
=
3
3
−1
9.6. Запишите необходимое и достаточное условие перпендикулярности
y − y0
z − z0
x − x0
=
=
.
плоскости Ax+By+Cz+D = 0 и прямой
k
l
m
x − x0
y − y0
9.7. Докажите, что условие принадлежности прямой
=
=
k
l
z − z0
=
плоскости Ax + By + Cz + D = 0 имеет вид
m
Ax0 + By0 + Cz0 + D = 0,
(9.32)
Ak + Bl + Cm = 0.
∗ 9.8. Покажите, что расстояние от точки T0 (x0 , y0 , z0 ) до прямой
y − y1
z − z1
=
=
можно вычислить по формуле
l
m
1
F12 + F22 + F32
,
d=
k 2 + l 2 + m2
x − x1
=
k
где введены обозначения:
l
m
k
m k l F1 = , F2 = , F3 = .
y1 − y0 z1 − z0 z1 − z0 x1 − x0 x1 − x0 y1 − y0 9.9. Найдите острый угол между прямыми, заданными уравнениями
x+1 y−9 z+2 x y+1 z+4
и =
.
=
=
=
2
−5
2
3
−6
3
9.10. Найдите тупой угол между прямыми
x−3 y−9 z
=
= .
−3
3
5
x+1
y−9
z+2
и
=
=
−1
−5
7
9.11. Найдите уравнение плоскости, проходящей через прямую
z + 10
x − 10 y
= =
−7
3
−1
(9.33)
x+1 y+2 z−6
.
=
=
2
4
8
(9.34)
параллельно прямой
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
∗ 9.12. Вычислите расстояние между скрещивающимися
y − y1
z − z1
x − x2
y − y2
z − z2
x − x1
=
=
и
=
=
.
k1
l1
m1
k2
l2
m2
343
прямыми
Ответы и решения к главе «Уравнение
прямой в пространстве»
9.1. Ответ:
&
−
'
17 ' &
19
29 17 ' & 19
, − , 0 , − , 0, − , , 0, − , 29 .
14 14
8
4
2
9.2. Ответ: 9x − 10y − 4z − 14 = 0.
9.3. Решение.
Запишем уравнение прямой, проходящей через точку T перпендикулярно плоскости:
x y−2 z+4
=
=
.
(9.35)
1
1
−1
Представим уравнение этой прямой в параметрическом виде:
x = u, y = u + 2, z = −u − 4,
(9.36)
где u ∈ R.
Подставим эти координаты в уравнение плоскости:
u + (u + 2) − (−u − 4) + 3 = 0,
(9.37)
отсюда получаем u = −3.
Зная u, найдем координаты точки пересечения прямой и плоскости:
x = −3, y = −1, z = −1.
(9.38)
Итак, точка пересечения перпендикуляра, опущенного из точки T на
плоскость, имеет координаты (−3, −1, −1).
9.4. Решение.
x − x0
y − y0
z − z0
Условие параллельности прямой
=
=
и плосk
l
m
кости Ax + By + Cz + D = 0 сводится к выполнению равенства Ak +
+Bl + Cm = 0, отражающего ортогональность направляющего вектора
τ = (k, l, m) и нормали к плоскости n = (A, B, C).
Согласно условию задачи, τ = (2, 3, 8), n = (8, 0, −3).
Поскольку выполняется равенство нулю скалярного произведения
(τ · n) = 0, то прямая и плоскость параллельны.
344
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
9.5. Ответ: нет, плоскость x + 2y − z − 2 = 0 и прямая
y+1
z
=
не являются параллельными.
=
3
−1
x−1
=
3
9.6. Решение.
Нормальный вектор плоскости Ax + By + Cz + D = 0 имеет коордиx − x0
наты (A, B, C). В то же время, направляющий вектор прямой
=
k
y − y0
z − z0
=
=
равен (k, l, m).
l
m
Для того чтобы прямая была перпендикулярна плоскости, необходимо и достаточно, чтобы нормальный вектор плоскости был коллинеарен
направляющему вектору прямой:
C
A B
=
= .
k
l
m
9.7. Доказательство.
В самом деле, первое из уравнений(9.32) означает, что точка(x0 ,y0 ,z0 ),
через которую проходит прямая, принадлежит плоскости. Второе уравнение отражает факт параллельности прямой и плоскости (см. упр. 9.4).
9.8. Доказательство.
Из уравнения прямой находим координаты ее направляющего вектора s = (l, m, n). Обозначим точку (x1 , y1 , z1 ), лежащую на этой прямой,
через T1 (x1 , y1 , z1 ).
Из свойств векторного произведения известно, что модуль векторного
произведения векторов равен площади параллелограмма, построенного
на этих векторах:
−−→
S = |T0 T1 × s|.
С другой стороны, площадь параллелограмма равна произведению
его стороны на высоту, проведенную к этой стороне: S = |s|d.
В нашем случае высота параллелограмма равна расстоянию d от точки до плоскости, а его сторона равна модулю направляющего вектора |s|.
Приравняв выражения для площади, несложно получить формулу
расстояния от точки до прямой:
−−→
|T0 T1 × s|
.
d=
|s|
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
345
Отсюда найдем
j
k i
−−→
T0 T1 × s = x1 − x0 y1 − y0 z1 − z0 =
k
l
m = (m(y1 − y0 ) − l(z1 − z0 ))i +
+ (k(z1 − z0 ) − m(x1 − x0 ))j +
+ (l(x1 − x0 ) − k(y1 − y0 ))k,
Таким образом,
−−→
|T0 T1 × s| =
5
2 2 2
6
m
k
6 l
k l m 7
= +
+
,
z1 − z0 x1 − x0 x1 − x0 y1 − y0 y1 − y0 z1 − z0 где
|s| =
/
k 2 + l 2 + m2 .
Следовательно,
5
2 2 2
6
m
k
6 l
m
k
l
7
+
+
y1 − y0 z1 − z0 z1 − z0 x1 − x0 x1 − x0 y1 − y0 √
.
d=
k 2 + l 2 + m2
9.9. Решение.
Прямые заданы в каноническом виде.
Определим угол α между их направляющими векторами a = (2, −5,
2) и b = (3, −6, 3):
(a · b)
;
cos α =
|a| · |b|
2 · 3 + (−5) · (−6) + 2 · 3
14
/
cos α = /
= √ .
3 22
22 + (−5)2 + 22 · 32 + (−6)2 + 32
14
Искомый угол α = arccos( √ ).
3 22
346
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
9.10. Решение.
Найдем угол α между направляющими векторами a = (−1, −5, 7) и
b = (−3, 3, 5) заданных прямых:
cos α =
a·b
.
|a||b|
Подставляем сюда числовые значения из условия задачи и получаем:
(−1) · (−3) + (−5) · 3 + 7 · 5
23
/
= √
.
5 129
(−1)2 + (−5)2 + 72 (−3)2 + 32 + 52
23
Следовательно, искомый угол равен π − α = π − arccos √
.
5 129
cos α = /
9.11. Решение.
Искомая плоскость параллельна направляющим векторам a1 = (−7, 3,
−1) и a2 = (2, 4, 8) и проходит через точку T0 (10, 0, −10), лежащую на
−−→
первой прямой. Таким образом, векторы a1 , a2 и T0 T компланарны.
Разлагая определитель, выражающий смешанное произведение
−−→
(T0 T , a1 , a2 ), например, по первой строке, получим:
x − 10 y z + 10
−7 3 −1 = 28(x − 10) + 54y − 34(z + 10) = 0,
2
4
8 и в итоге получаем:
14x + 27y − 17z − 310 = 0.
9.12. Решение.
Введем обозначения T1 (x1 , y1 , z1 ), T2 (x2 , y2 , z2 ), a1 = (k1 , l1 , m1 ), a2 =
= (k2 , l2 , m2 ).
−−→
Рассмотрим параллелограмм, построенный на векторах T1 T2 , a1 и a2 ,
и вычислим его объем V .
С одной стороны, объем V равен произведению модуля векторного
произведения |a1 × a2 | и высоты параллелограмма. С другой стороны,
−−→
V = abs(T1 T2 , a1 , a2 ).
Поскольку искомое расстояние d между скрещивающимися прямыми
равно высоте, то
−−→
abs(T1 T2 , a1 , a2 )
, или
d=
|a1 × a2 |
ГЛАВА 9. УРАВНЕНИЕ ПРЯМОЙ В ПРОСТРАНСТВЕ
x2 − x1 y2 − y1 z2 − z1 abs k1
l1
m1 k2
l2
m2 d = 5
2 .
6
l m 2 m k 2
6k1 l1 1
1 1
1
7
+
+
k2 l 2 m 2 k2 l 2 m 2 347
Глава 10
Билинейные и квадратичные
формы
10.1.
Билинейные формы
Пусть в n-мерном векторном пространстве Ln задан базис B = (e1 , e2 ,
. . . , en ). Рассмотрим два вектора, принадлежащих пространству Ln :
x=
n
xi e i ,
y=
i=1
n
yi e i ,
(10.1)
i=1
где xi , yi ∈ R для всех i = 1, 2, . . . , n.
Линейная комбинация всевозможных произведений проекций векторов x и y на базисные орты
n
aij xi yj ,
(10.2)
i,j=1
где aij — произвольные вещественные числа, называется билинейной
формой A(x, y), определенной на базисе B. Матрица A = (aij ), где
1 i, j n, называется матрицей билинейной формы. Как легко
видеть, произвольную билинейную форму можно записать с помощью
операции матричного умножения как
A(x, y) = xT A y.
(10.3)
Выполняются следующие свойства линейности формы по каждому из ее аргументов:
∀x, y, z ∈ Ln и ∀α ∈ R
1. A(x + y, z) = A(x, z) + A(y, z);
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
349
2. A(αx, z) = αA(x, z);
3. A(x, y + z) = A(x, y) + A(x, z);
4. A(x, αz) = αA(x, z).
Билинейная форма называется симметричной, если для любых x,
y ∈ Ln выполняется условие A(x, y) = A(y, x).
Билинейная форма называется положительно определенной, если ∀x ∈ Ln , x = 0, выполняется неравенство A(x, x) > 0.
Пример 10.1. Рассмотрим векторы x = (x1 , x2 , x3 ) и y = (y1 , y2 , y3 )
некоторого трехмерного векторного пространства и билинейную форму
A(x, y) = x1 y1 + 3x2 y2 + 8x3 y3 , определенную на базисе данного пространства. Матрица A билинейной формы в таком случае будет иметь
следующий диагональный вид:
⎡
⎤
1 0 0
⎢
⎥
⎥
A=⎢
(10.4)
⎣ 0 3 0⎦ .
0 0 8
Представим A в матричной записи:
⎡
⎤⎡ ⎤
1 0 0
y
⎢
⎥ ⎢ 1⎥
T
⎥⎢ ⎥
A(x, y) = x A y = [x1 , x2 , x3 ] ⎢
⎣ 0 3 0 ⎦ ⎣y 2 ⎦ =
0 0 8 y3
⎡ ⎤
y
⎢ 1⎥
⎢
= [x1 , 3x2 , 8x3 ] ⎣y2 ⎥
⎦ = x1 y1 + 3x2 y2 + 8x3 y3 . (10.5)
y3
Нетрудно показать, что данная форма обладает свойствами симметричности и положительной определенности:
A(x, y) = x1 y1 + 3x2 y2 + 8x3 y3 = y1 x1 + 3y2 x2 + 8y3 x3 =
= A(y, x) ⇒ форма симметрична; (10.6)
A(x, x) = x21 + 3x22 + 8x23 0 для всех ненулевых векторов x ⇒
⇒ A(x, y) — положительно определенная форма. (10.7)
350
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
Пример 10.2. M(x, y) = x1 y1 −x2 y2 −x3 y3 −x4 y4 — билинейная форма
на R4 . Как легко заметить, она является симметричной, но не является положительно определенной. Заметим, что данная форма определяет метрику пространства-времени в специальной теории относительности [17].
10.2.
Квадратичные формы
Квадратичной формой будем называть выражение
ω(x) = A(x, x),
(10.8)
где A(x, x) — некоторая билинейная форма. Название «квадратичная
форма» связано с выполнением для данного выражения свойства однородности второй степени по аргументу формы: ∀α ∈ R справедливо
равенство
(10.9)
ω(αx) = α2 ω(x).
Пример 10.3. На основе билинейной формы M(x, y), определенной
в примере 10.2, можно построить квадратичную форму
μ(x) = M(x, x) = x21 − x22 − x23 − x24 ,
(10.10)
которая зависит от четырех переменных: x1 , x2 , x3 , x4 .
Если в n-мерном линейном векторном пространстве Ln задан базис и
выбран вектор x = [x1 , x2 , . . . , xn ]T , то
T
ω(x) = x A x =
n
aij xi xj ,
(10.11)
i,j=1
что позволяет трактовать квадратичную форму как функцию, заданную
на множестве всех возможных векторов x.
Матрицу A = (aij ) называют матрицей квадратичной формы
ω(x). Эту матрицу можно считать симметричной, поскольку выражение
вида aij xi xj + aji xj xi за счет коммутативности умножения вещественных
чисел всегда можно представить как
aij xi xj + 4
aji xj xi ,
aij xi xj + aji xj xi ≡ 4
aji = (aij + aji )/2.
где введено обозначение 4
aij = 4
(10.12)
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
351
Итак, произвольную квадратичную форму в некотором базисе можно
задать в матричном виде:
(10.13)
xT A x,
где x = (x1 , x2 , . . . , xn ) — столбец, составленный из переменных, причем
матрица A квадратичной формы всегда допускает запись в симметричном виде: aji = aij для всех i, j = 1, . . . , n.
Симметричная билинейная форма A(x, y) называется полярной к
квадратичной форме ω(x) = A(x, x). Для полярной формы справедлива
формула:
9
18
(10.14)
A(x, y) = ω(x + y) − ω(x) − ω(y) .
2
Пример 10.4. Найдем билинейную форму, полярную к ω(x) = x1 x2 +
+ x2 x3 + x1 x3 .
Решение.
Согласно определению полярной формы (10.14) получаем:
A(x, y) =
18
(x1 + y1 )(x2 + y2 ) + (x2 + y2 )(x3 + y3 ) + (x1 + y1 )(x3 + y3 )−
2
9
− (x1 x2 + x2 x3 + x1 x3 ) − (y1 y2 + y2 y3 + y1 y3 ) . (10.15)
После алгебраических преобразований находим выражение для искомой
билинейной формы:
1
A(x, y) = (x1 y2 + x1 y3 + x2 y1 + x2 y3 + x3 y1 + x3 y2 ).
2
(10.16)
При переходе к новому базису, т. е. при невырожденной замене переменных x1 , x2 , . . . , xn с матрицей замены C, матрица A квадратичной
формы в новом базисе примет вид:
A = C T A C.
(10.17)
Известно, что при замене базиса ранг матрицы квадратичной формы
не изменяется.
Ранг матрицы квадратичной формы называют рангом квадратичной формы. Если эта матрица имеет ранг, равный размерности линейного пространства, т. е. числу переменных n, то квадратичную форму
называют невырожденной, а если ранг меньше n, то ее называют вырожденной.
Пример 10.5. Найдем матрицу следующей квадратичной формы от
трех переменных:
ω(x) = 3x21 + 2x1 x2 − 5x1 x3 − x22 + x23 .
(10.18)
352
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
Решение.
Диагональные элементы aii матрицы квадратичной формы ω(x) определяются как коэффициенты при квадратичных слагаемых x2i , а недиагональные aij , где i = j, в два раза меньше соответствующих коэффициентов при слагаемых вида xi xj :
⎡
⎤
3
1 −5/2
⎢
⎥
⎢
A=⎣ 1
(10.19)
−1
0 ⎥
⎦.
−5/2
0
1
Воспользовавшись любым из известных методов вычисления ранга
матрицы, например, методом приведения к ступенчатому виду, находим
rk A = 3. Так как ранг матрицы A равен числу переменных, то данная
квадратичная форма является невырожденной.
В матричной записи квадратичная форма может быть представлена
в виде:
⎡
⎤⎡ ⎤
3
1 −5/2
x
⎢
⎥ ⎢ 1⎥
⎢
⎥
⎢
(10.20)
ω(x) = [x1 , x2 , x3 ] ⎣ 1
−1
0 ⎦ ⎣ x2 ⎥
⎦.
−5/2
0
1
x3
10.3.
Приведение квадратичной формы
к каноническому виду
Если в некотором базисе матрица квадратичной формы принимает
диагональный вид
⎤
⎡
0
λ1 0 0 . . . 0
⎥
⎢
⎥
⎢ 0 λ2 0 . . . 0
0
⎥
⎢
⎥
⎢
(10.21)
Λ = ⎢. . . . . . . . . . . . . . . . . . . . . . . ⎥ ,
⎥
⎢
⎢ 0 0 0 . . . λn−1 0 ⎥
⎦
⎣
0 0 0 . . . 0 λn
то, как несложно видеть, квадратичная форма образована линейной комбинацией квадратов переменных x1 , x2 , . . . , xn :
ω(x) = λ1 x21 + λ2 x22 + . . . + λn x2n .
(10.22)
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
353
Перекрестные слагаемые вида xi xj для i = j в этом случае не входят в
выражение для ω(x).
Среди коэффициентов λi , где i = 1, 2, . . . , n, могут быть положительные, отрицательные или равные нулю числа.
Теорема 10.1. Для каждой квадратичной формы существует базис, в котором она имеет канонический вид :
ω(x) =
n
λi x2i .
(10.23)
i=1
Следует обратить внимание на то, что канонический базис определен
неоднозначно.
10.3.1.
Метод Лагранжа выделения полных
квадратов
В приложениях часто встречается задача приведения квадратичной
формы к диагональному виду. Для решения этой задачи предложено
несколько методов.
Метод Лагранжа приведения квадратичной формы к каноническому виду заключается в следующем.
n
aij xi xj , определенная
Пусть задана квадратичная форма ω(x) =
i,j=1
на базисе пространства Ln .
В зависимости от наличия в сумме слагаемых вида aii x2i рассмотрим
два случая.
1) Хотя бы один из коэффициентов att при квадратичных слагаемых
не равен нулю.
Основная идея метода состоит в выделении полного квадрата путем
объединения всех слагаемых, содержащих переменную xt . Полученный
полный квадрат служит основой для замены переменных, исключающей
линейные по xt члены. Если в форме остались перекрестные слагаемые
вида xi xj , то возвращаемся к началу процедуры. В противном случае
форма содержит только квадратичные слагаемые, и приведение к диагональному виду завершено.
Как видим, без ограничения общности можно полагать a11 = 0.
Рассмотрим первый шаг метода Лагранжа более детально.
Обозначим через S сумму всех слагаемых, содержащих x1 :
S = a11 x21 + 2a12 x1 x2 + . . . + 2a1n x1 xn
(10.24)
354
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
и дополним S до полного квадрата. Получим:
&
a12
a1n '2
x2 + . . . +
xn − R,
S = a11 x1 +
a11
a11
где выражение R не содержит в своей записи x1 .
Далее сделаем замену переменных
⎧
⎨x = x1 + a12 x2 + . . . + a1n xn ,
1
a11
a11
⎩x = x для i = 2, . . . , n.
i
(10.25)
(10.26)
i
Тогда квадратичная форма в новом базисе примет вид:
n
ω(x) = a11 (x1 )2 +
aij xi xj .
(10.27)
i,j=2
В дальнейшем таким же способом можно поступить с переменными
x2 , x3 и т. д. и, в итоге, исключить все слагаемые вида xi xj для i = j.
2) Все коэффициенты aii = 0.
В этом случае выберем aij = 0 для некоторых i = j и сделаем замену
переменных:
⎧
⎪
⎨ xi = x i + x j ,
(10.28)
xj = xi − xj ,
⎪
⎩ = x для k = i, j.
xk
k
В результате каждое произведение xi xj будет представлено в виде
линейной комбинации квадратичных слагаемых xi xj = (xi )2 − (xj )2 и
мы придем к первому случаю.
После выполнения шага 1) и, при необходимости, шага 2) приведение
квадратичной формы к диагональному виду будет закончено.
Пример 10.6. Методом Лагранжа приведем к каноническому виду
форму
(10.29)
ω(x) = 2x1 x2 − 6x1 x3 − x22 + 5x23 .
Решение.
Соберем слагаемые, содержащие x2 :
−x22 + 2x1 x2 −6x1 x3 + 5x23 = − (x22 − 2x1 x2 + x21 ) + x21 − 6x1 x3 + 5x23 =
!"
#
!"
# !" #
S
=
полный квадрат
−(x1 − x2 )2 + x21
−R
− 6x1 x3 + 5x23 . (10.30)
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
Сделаем замену переменных:
⎧
⎪
⎨y1 = x1 ,
y2 = x 1 − x2 ,
⎪
⎩ =x .
y3
3
355
(10.31)
В результате получим форму
ω(y) = −y22 + y12 − 6y1 y3 + 5y32 .
(10.32)
Теперь соберем слагаемые, содержащие y1 , и дополним их до полного
квадрата.
ω(y) = −y22 + (y12 − 6y1 y3 + 9y32 ) − 9y32 + 5y32 =
= −y22 + (y1 − 3y3 )2 − 4y32 . (10.33)
Сделаем вторую замену переменных:
⎧
⎪
⎨z1 = y1 − 3y3 ,
z2 = y 2 ,
⎪
⎩
z3 = y 3 .
(10.34)
Окончательно получаем ω(z) = z12 − z22 − 4z32 .
Пример 10.7. Методом Лагранжа приведем к каноническому виду
форму
(10.35)
ω(x) = x1 x2 + x1 x3 + x2 x3 .
Решение.
Так как слагаемые вида x2i в данном выражении отсутствуют, то делаем замену переменных
⎧
⎪
⎨ x 1 = x 1 + x2 ,
(10.36)
x2 = x1 − x2 ,
⎪
⎩ x = x ,
3
3
в результате чего получаем:
ω(x ) = [(x1 )2 + 2x1 x3 + (x3 )2 ] − (x2 )2 − (x3 )2 =
= (x1 + x3 )2 − (x2 )2 − (x3 )2 .
Новая замена
⎧
⎪
⎨y1 = x1 + x3 ,
y2 = x2 ,
⎪
⎩ = x
y3
3
(10.37)
(10.38)
(10.39)
356
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
в итоге приводит к форме
ω(y) = y12 − y22 − y32 ,
1
1
где y1 = (x1 + x2 ) + x3 , y2 = (x1 − x2 ), y3 = x3 .
2
2
10.3.2.
(10.40)
Метод Якоби
Пусть отличны от нуля следующие определители, составленные из
элементов матрицы A = (aij ) квадратичной формы ω(x):
a a 11 12 (10.41)
Δ1 = a11 , Δ2 = , ...,
a21 a22 a a . . . a 1n 11 12
a21 a22 . . . a2n (10.42)
Δn = .
.. . . . .. .
.
.
.
.
an1 an2 . . . ann Тогда существует базис B = (e1 , e2 , . . . , en ), в котором ω(x) представляется в виде:
Δn 2
Δ1 2 Δ 2 2
z1 +
z2 + · · · +
z ,
(10.43)
ω(z) =
Δ0
Δ1
Δn−1 n
где через zi , i = 1, 2, . . . , n, обозначены координаты вектора x в новом
базисе B и для единообразия обозначений принято Δ0 = 1. В этом заключается метод Якоби приведения квадратичной формы к каноническому виду.
По сравнению с методом Лагранжа метод Якоби имеет то преимущество, что переход к базису B происходит непосредственно, без промежуточных шагов.
Переход от базиса (e1 ,e2 ,. . . ,en ) к каноническому базису (c1 ,c2 ,. . . ,cn )
осуществляется по формулам
ci =
i
ηij ej ,
i = 1, 2, . . . , n,
(10.44)
j=1
ηij = (−1)i+j
Δi−1,j
,
Δi−1
(10.45)
где Δi−1,j — минор матрицы, формируемой теми элементами из (aij ),
которые находятся на пересечении строк с номерами k = 1, 2, . . . , i − 1 и
столбцов с номерами k = 1, 2, . . . , j − 1, j + 1, . . . , i.
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
357
Заметим, что введенные определители Δ1 , Δ2 , . . . , Δn носят название
угловых миноров матрицы квадратичной формы.
Рангом квадратичной формы является число ненулевых коэффициентов λi = 0.
Введем следующие обозначения:
n+ — количество положительных коэффициентов λi > 0,
n− — количество отрицательных коэффициентов λi < 0,
n0 — количество коэффициентов, равных нулю, λi = 0.
Упорядоченный набор целых неотрицательных чисел (n+ , n− , n0 ) называется сигнатурой квадратичной формы.
Квадратичная форма ω(x) называется положительно определенной, если для любого ненулевого x выполняется неравенство
ω(x) > 0,
(10.46)
и отрицательно определенной, если выполняется ω(x) < 0.
Квадратичная форма ω(x) называется знакопеременной, если существуют такие x1 и x2 , что имеют место неравенства
ω(x1 ) > 0,
ω(x2 ) < 0.
(10.47)
Критерий Сильвестра1 .
Для положительной определенности квадратичной формы ω(x) необходимо и достаточно, чтобы все главные миноры ее матрицы были
положительны: Δ1 > 0, Δ2 > 0, . . . , Δn > 0.
Для отрицательной определенности квадратичной формы ω(x) необходимо и достаточно, чтобы знаки угловых миноров ее матрицы чередовались, причем Δ1 < 0.
Закон инерции. Количество слагаемых с положительными (отрицательными) коэффициентами квадратичной формы, приведенной к
каноническому виду, не зависит от способа приведения формы к этому
виду.
Контрольные вопросы к главе «Билинейные
и квадратичные формы»
1. Дайте определение билинейной формы.
2. Перечислите свойства линейности билинейных форм.
1
Сильвестр (James Joseph Sylvester) (1814–1897) — английский математик.
358
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
3. Какие билинейные формы называются симметричными, положительно определенными?
4. Дайте определение квадратичной формы.
5. Объясните, почему матрицу произвольной квадратичной формы
всегда можно считать симметричной.
6. Какая билинейная форма называется полярной к квадратичной
форме?
7. Как определяется ранг квадратичной формы?
8. В чем состоит разница между вырожденными и невырожденными
квадратичными формами?
9. Расскажите о методах приведения квадратичных форм к диагональному виду: методе Лагранжа и методе Якоби.
10. Как определяются угловые миноры матрицы квадратичной формы?
11. Сформулируйте критерий Сильвестра.
12. В чем состоит закон инерции квадратичных форм?
Задачи для самостоятельного решения
10.1. Какие из следующих функций F (x, y) от векторов x = (x1 , x2 ) ∈
∈ R2 и y = (y1 , y2 ) ∈ R2 являются билинейными формами?
1) F (x, y) = x1 y1 + x2 y2 ;
√
2) F (x, y) = 2;
3) F (x, y) = (x1 − y1 )2 − (x2 − y2 )2 ;
4) F (x, y) = 4x2 y2 .
10.2. Найдите билинейную форму, полярную к форме:
1) x21 − 2x1 x2 + 3x1 x3 + 7x23 ;
2) −2x21 + 3x1 x3 + x2 x3 ;
3) 3x1 x3 + x22 ;
4) x21 + 4x1 x2 + 4x1 x3 − 4x22 − 2x2 x3 − x23 .
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
359
10.3. Приведите к каноническому виду квадратичную форму от трех переменных:
1) x21 + 2x1 x2 + 4x1 x3 − 4x23 ;
2) x1 x2 + x1 x3 − 6x2 x3 ;
3) −2x21 − 7x1 x3 ;
4) x21 − 4x1 x2 + 12x1 x3 − x22 + 4x2 x3 + 3x23 .
10.4. Приведите к каноническому виду квадратичную форму от четырех
переменных:
1) x21 + 2x1 x2 + 2x1 x3 + 2x1 x4 + 3x22 + 6x2 x3 + 8x2 x4 + x23 + 2x3 x4 + x24 ;
2) x1 x2 + x1 x4 + x2 x3 + x3 x4 ;
3) −5x21 + 2x1 x4 + 3x22 + x2 x3 − 2x2 x4 − x23 + 2x3 x4 + x24 ;
4) x21 + x1 x2 + x1 x3 + x1 x4 + x22 + x2 x3 + x2 x4 + x23 + x3 x4 + x24 .
10.5. Какие из следующих квадратичных форм являются положительно определенными, отрицательно определенными, знакопеременными?
1) x21 + x1 x2 + x22 ;
2) x21 − 9x1 x2 + x22 ;
3) x1 x2 + 2x1 x4 + 3x2 x3 + 4x3 x4 ;
4) x1 x2 + x3 x4 .
∗ 10.6. При каких значениях вещественного параметра a квадратичная
форма
(10.48)
ω(x) = ax21 + 2x1 x2 + (10 − a)x22
является положительно определенной, отрицательно определенной?
∗ 10.7. Покажите, что форма
деленной.
n
xi xj
является положительно опреi,j=1 i + j − 1
Ответы и решения к главе «Билинейные и
квадратичные формы»
10.1. Ответ:
Функции из пунктов 1) и 4) являются билинейными формами.
360
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
10.2. Решение.
Воспользуемся формулой (10.14) для полярной формы:
1)
9
18
A(x, y) = ω(x + y) − ω(x) − ω(y) =
2
18
= (x1 +y1 )2 −2(x1 +y1 )(x2 +y2 )+3(x1 +y1 )(x3 +y3 )+7(x3 + y3 )2−
2
9
− (x21 − 2x1 x2 + 3x1 x3 + 7x23 ) − (y12 − 2y1 y2 + 3y1 y3 + 7y32 ) =
3
3
= x1 y1 − x1 y2 + x1 y3 − x2 y1 + x3 y1 + 7x3 y3 ;
2
2
2)
18
− 2(x1 + y1 )2 + 3(x1 + y1 )(x3 + y3 ) + (x2 + y2 )(x3 + y3 )−
A(x, y) =
2
9
− (−2x21 + 3x1 x3 + x2 x3 ) − (−2y12 + 3y1 y3 + y2 y3 ) =
3
1
3
1
= −2x1 y1 + x1 y3 + x2 y3 + x3 y1 + x3 y2 ;
2
2
2
2
3)
18
A(x, y) = 3(x1 + y1 )(x3 + y3 ) + (x2 + y2 )2 −
2
9
− (3x1 x3 + x22 ) − (3y1 y3 + y22 ) =
3
3
= x 1 y 3 + x2 y 2 + x 3 y 1 ;
2
2
4)
18
A(x, y) = (x1 + y1 )(x1 + y1 )+4(x1 + y1 )(x2 + y2 )+4(x1 + y1 )(x3 + y3 )−
2
− 4(x2 + y2 )2 − 2(x2 + y2 )(x3 + y3 ) − (x3 + y3 )(x3 + y3 )−
− (x21 + 4x1 x2 + 4x1 x3 − 4x22 − 2x2 x3 − x23 )−
9
− (y12 + 4y1 y2 + 4y1 y3 − 4y22 − 2y2 y3 − y32 ) =
= x1 y1 + 2x1 y2 + 2x1 y3 + 2x2 y1 − x2 y3 − 4x2 y2 + 2x3 y1 −
− x3 y2 − x3 y3 .
10.3. Решение.
1) Преобразуем выражение:
x21 + 2x1 x2 + 4x1 x3 − 4x23 =
= x21 + 2x1 (x2 + 2x3 ) + (x2 + 2x3 )2 − (x2 + 2x3 )2 − 4x23 =
= (x1 + x2 + 2x3 )2 − (x2 + 2x3 )2 − (2x3 )2 .
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
361
Сделаем замену переменных:
⎧
⎪
⎨y1 = x1 + x2 + 2x3 ,
y2 = x2 + 2x3 ,
⎪
⎩
y3 = 2x3 .
Получим квадратичную форму в каноническом виде:
y12 − y22 − y32 .
2) Сделаем замену переменных:
⎧
⎪
⎨x1 = x1 + x2 ,
x2 = x1 − x2 ,
⎪
⎩
x3 = x3 .
Преобразуем выражение:
x1 x2 + x1 x3 − 6x2 x3 =
= (x1 + x2 )(x1 − x2 ) + (x1 + x2 )x3 − 6(x1 − x2 )x3 =
= (x1 )2 − (x2 )2 + x1 x3 + x2 x3 − 6x1 x3 + 6x2 x3 =
= (x1 )2 − (x2 )2 − 5x1 x3 + 7x2 x3 =
2 2
5 5 2
= (x1 ) − 5x1 x3 +
x
x
−
+ 7x2 x3 − (x2 )2 =
2 3
2 3
2
2
5 5 2
= x1 − x3 + 7x2 x3 − (x2 ) −
x
=
2
2 3
2 2 2 2
5 7 5 7 = x 1 − x3 − x 2 − x3 −
x
−
x
=
2
2
2 3
2 3
2 2
5 7 = x1 − x3 − x2 − x3 + 6(x3 )2 .
2
2
Сделаем замену переменных:
⎧
5 1
⎪
⎪
⎪y1 = x1 − 2 x3 = 2 (x1 + x2 − 5x3 ),
⎨
7
1
y2 = x2 − x3 = (x1 − x2 − 7x3 ),
⎪
⎪
2
2
⎪
⎩y = √6x .
3
3
Получим квадратичную форму в каноническом виде:
y12 − y22 + y32 .
362
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
3) Преобразуем выражение:
− 2x21 − 7x1 x3 =
* √
+2 * √
+2
&√ '2
7 2
7 2
=−
x3 +
x3 =
2x1 − 7x1 x3 −
4
4
*
+2 * √
+2
√
√
7 2
7 2
=
x3 +
x3 .
2x1 +
4
4
Сделаем замену переменных:
√
⎧
√
7
2
⎪
⎨y1 = 2x1 +
x3 ,
4
√
⎪
⎩y = 7 2 x .
2
3
4
Получим квадратичную форму в каноническом виде:
−y12 + y22 .
4) Преобразуем выражение:
x21 − 4x1 x2 + 12x1 x3 − x22 + 4x2 x3 + 3x23 =
= x21 − 4x1 (x2 − 3x3 ) + (2x2 − 6x3 )2 −
− (2x2 − 6x3 )2 − x22 + 4x2 x3 + 3x23 =
= (x1 − 2x2 + 6x3 )2 − 4x22 + 24x2 x3 − 36x23 − x22 + 4x2 x3 + 3x23 =
= (x1 − 2x2 + 6x3 )2 − 5x22 + 28x2 x3 − 33x23 =
&√ '2
= (x1 − 2x2 + 6x3 )2 −
5x2 + 28x2 x3 −
* √
+2 * √
+2
14 5
14 5
−
x3 +
x3 − 33x23 =
5
5
+2
*
√
√
5
14
31
= (x1 − 2x2 + 6x3 )2 −
x3 + x23 .
5x2 −
5
5
Сделаем замену переменных:
⎧
y1 = x1 −2x2 + 6x3 ,
⎪
⎪
⎪
⎪
√
14
⎨
y 2 = 5 x 2 − x3 ,
5
0
⎪
⎪
⎪
⎪
⎩y3 = 31 x3 .
5
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
363
Получим квадратичную форму в каноническом виде:
y12 − y22 + y32 .
10.4. Решение.
1) Преобразуем выражение:
x21 + 2x1 x2 + 2x1 x3 + 2x1 x4 + 3x22 + 6x2 x3 + 8x2 x4 + x23 + 2x3 x4 + x24 =
= x21 + 2x1 (x2 + x3 + x4 ) + (x2 + x3 + x4 )2 − (x2 + x3 + x4 )2 +
+ 3x22 + 6x2 x3 + 8x2 x4 + x23 + 2x3 x4 + x24 =
= (x1 + x2 + x3 + x4 )2 − x22 − 2x2 x3 − 2x2 x4 − x23 − 2x3 x4 − x24 +
+ 3x22 + 6x2 x3 + 8x2 x4 + x23 + 2x3 x4 + x24 =
= (x1 + x2 + x3 + x4 )2 + 2x22 + 4x2 x3 + 6x2 x4 =
&√ '2
= (x1 + x2 + x3 + x4 )2 +
2x2 + 2x2 (2x3 + 3x4 )+
1
1
+ (2x3 + 3x4 )2 − (2x3 + 3x4 )2 =
2
* 2
+2
√
√
√
2
3
= (x1 + x2 + x3 + x4 )2 +
2x2 + 2x3 +
x4 −
2
*
+2
√
√
3 2
−
2x3 +
x4 .
2
Сделаем замену переменных:
⎧
⎪
y 1 = x 1 + x2 + x 3 + x4 ,
⎪
⎪
√
⎪
⎨
√
√
3 2
x4 ,
y2 = 2x2 + 2x3 +
2
√
⎪
⎪
√
⎪
⎪
⎩y3 = 2x3 + 3 2 x4 .
2
Получим квадратичную форму в каноническом виде:
y12 + y22 − y32 .
2) Сделаем замену переменных:
⎧
x = x1 + x2 ,
⎪
⎪
⎪ 1
⎨
x2 = x1 − x2 ,
⎪
x3 = x3 + x4 ,
⎪
⎪
⎩
x4 = x3 − x4 .
364
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
Преобразуем выражение:
x 1 x 2 + x1 x 4 + x2 x 3 + x3 x 4 =
= (x1 + x2 )(x1 − x2 ) + (x1 + x2 )(x3 − x4 )+
+ (x1 − x2 )(x3 + x4 ) + (x3 + x4 )(x3 − x4 ) =
= (x1 )2 − (x2 )2 + 2x1 x3 − 2x2 x4 + (x3 )2 − (x4 )2 =
= (x1 )2 + 2x1 x3 + (x3 )2 − (x2 )2 − 2x2 x4 − (x4 )2 =
= (x1 + x3 )2 − (x2 + x4 )2 .
Сделаем замену переменных:
⎧
1
⎪
⎪
y1 = x1 + x3 = (x1 + x2 + x3 + x4 ),
⎪
⎪
2
⎪
⎨
⎪
⎪
⎪
⎪
1
⎪
⎩y2 = x2 + x4 = (x1 − x2 + x3 − x4 ).
2
Получим квадратичную форму в каноническом виде:
y12 − y22 .
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
365
3) Преобразуем выражение:
− 5x21 + 2x1 x4 + 3x22 + x2 x3 − 2x2 x4 − x23 + 2x3 x4 + x24 =
= x24 + 2x4 (x1 − x2 + x3 ) + (x1 − x2 + x3 )2 −
− (x1 − x2 + x3 )2 − 5x21 + 3x22 + x2 x3 − x23 =
= (x1 − x2 + x3 + x4 )2 − 6x21 + 2x1 x2 + 2x22 − 2x1 x3 + 3x2 x3 − 2x23 =
*√
+2
&√ '2
6
= (x1 − x2 + x3 + x4 )2 −
(x2 − x3 ) +
6x1 + 2x1 (x2 − x3 ) −
6
*√
+2
6
+
(x2 − x3 ) + 2x22 + 3x2 x3 − 2x23 =
6
*
+2
√
√
6
2
= (x1 − x2 + x3 + x4 ) −
(x2 − x3 ) +
6x1 −
6
11
8
13
+ x22 + x2 x3 − x23 =
6
3*
6
+2
√
√
6
= (x1 − x2 + x3 + x4 )2 −
(x2 − x3 ) +
6x1 −
6
*0
+2
* √
+2 * √
+2
13
8 78
8 78
11
8
+
x2 + x 2 x 3 +
x3 −
x3 − x23 =
6
3
78
78
6
*
+
√
2
√
6
2
= (x1 − x2 + x3 + x4 ) −
(x2 − x3 ) +
6x1 −
6
*0
+ 2 *0
+2
√
13
69
8 78
+
x2 +
x3 −
x3 .
6
78
26
Сделаем замену переменных:
⎧
⎪
y = x 1 − x 2 + x3 + x4 ,
⎪
√
⎪ 1
⎪
√
⎪
6
⎪
⎪
(x2 − x3 ),
⎪
⎨y2 = 06x1 − 6 √
13
8 78
⎪
y
x
x3 ,
=
+
3
2
⎪
⎪
6
78
⎪
0
⎪
⎪
⎪
69
⎪
⎩ y4 =
x3 .
26
Получим квадратичную форму в каноническом виде:
y12 − y22 + y32 − y42 .
366
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
4) Преобразуем выражение:
x21 + x1 x2 + x1 x3 + x1 x4 + x22 + x2 x3 + x2 x4 + x23 + x3 x4 + x24 =
1
1
= x21 + x1 (x2 + x3 + x4 ) + (x2 + x3 + x4 )2 − (x2 + x3 + x4 )2 +
2
2
+ x22 + x2 x3 + x2 x4 + x23 + x3 x4 + x24 =
=
1
x1 + (x2 + x3 + x4 )
2
2
1
3
1
+ x22 + x2 x3 + x2 x4 +
4
2
2
3
1
3
+ x23 + x3 x4 + x24 =
4
2
4
+2
2 * √
3
1
x2 +
= x1 + (x2 + x3 + x4 ) +
2
2
1
+ x2 (x3 + x4 ) +
2
*√
3
(x3 + x4 )
6
+2
=
+2
√
2 * √
3
3
1
= x1 + (x2 + x3 + x4 ) +
x2 +
(x3 + x4 ) +
2
2
6
1
2
2
+ x23 + x3 x4 + x24 =
3
3
3
*
+2
√
√
2
3
3
1
x2 +
(x3 + x4 ) +
= x1 + (x2 + x3 + x4 ) +
2
2
6
*0
+
=
2
x3
3
+2
1
+ x3 x4 +
3
1
x1 + (x2 + x3 + x4 )
2
*√
6
x4
12
*√
+2
−
6
x4
12
+2
2
+ x24 =
3
*√
2
+
+2
√
3
3
x2 +
(x3 + x4 ) +
2
6
*0
+
+2 * √
+2
√
2
6
10
x3 +
x4 +
x4 .
3
12
4
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
367
Сделаем замену переменных:
⎧
1
⎪
⎪
y1 = x1 + (x2 + x3 + x4 ),
⎪
⎪
√ 2 √
⎪
⎪
⎪
3
3
⎪
⎪
x2 +
(x3 + x4 ),
⎨ y2 =
2
6
0
√
⎪
⎪y3 = 2 x3 + 6 x4 ,
⎪
⎪
12
⎪
√3
⎪
⎪
⎪
10
⎪
⎩ y4 =
x4 .
4
Получим квадратичную форму в каноническом виде:
y12 + y22 + y32 + y42 .
10.5. Решение.
1) Запишем матрицу квадратичной формы:
⎤
⎡
1
⎢1 2⎥
⎥
⎢
⎣1 ⎦ .
1
2
Воспользуемся критерием Сильвестра. Для этого вычислим угловые миноры:
1
1 2
2
1
> 0.
=1−
1 = 1 > 0, 2
1 1
2
Следовательно, форма является положительно определенной.
2) Запишем матрицу квадратичной формы:
⎤
⎡
9
⎢ 1 −2⎥
⎥.
⎢
⎦
⎣ 9
−
1
2
Воспользуемся критерием Сильвестра. Для этого вычислим угловые миноры:
9
1 − 2
9
2 < 0.
=1−
1 = 1 > 0, 2
9
1 −
2
368
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
Следовательно, форма является знакопеременной.
3) Допустим, что x3 = x4 = 0. В таком случае в квадратичной форме останется только одно ненулевое слагаемое x1 x2 . Очевидно, что это
слагаемое может принимать как положительные, так и отрицательные
значения. Следовательно, форма знакопеременная.
4) Допустим, что x3 = 0. В таком случае в квадратичной форме останется только одно ненулевое слагаемое x1 x2 . Очевидно, что это слагаемое
может быть как положительным, так и отрицательным. Следовательно,
форма является знакопеременной.
10.6. Решение.
Запишем матрицу квадратичной формы:
a
1
.
1 10 − a
Воспользуемся критерием Сильвестра. Для этого вычислим угловые миноры:
a
1 a = a; = a(10 − a) − 1.
1 10 − a
Для того чтобы форма была положительно определенной, необходимо и
достаточно, чтобы оба определителя были положительными:
a > 0,
a > 0,
⇒
⇒
a(10 − a) − 1 > 0;
a2 − 10a + 1 < 0;
⇒
a > 0,
√
√ a ∈ 5 − 2 6, 5 + 2 6 .
Для того чтобы форма была отрицательно определенной, необходимо и
достаточно, чтобы угловой минор первого порядка был отрицательным,
а второго — положительным:
a < 0,
√ √
a ∈ 5 − 2 6, 5 + 2 6 .
Данная система несовместна, следовательно, форма не может быть отрицательно определенной ни при каких значениях a.
Рассмотрим случаи, когда угловые миноры равны нулю:
a = 0,
ω(x) = 2x1 x2 + 10x22 ;
ГЛАВА 10. БИЛИНЕЙНЫЕ И КВАДРАТИЧНЫЕ ФОРМЫ
369
ω(x) может принимать отрицательное значение, например, при x1 =
= −10, x2 = 1;
√
a = 5 − 2 6,
&
&
√ ' 2
√ ' 2
ω(x) = 5 − 2 6 x1 + 2x1 x2 + 5 + 2 6 x2 =
2
2
2
2
√
√
=
5 − 2 6x1 + 2x1 x2 +
5 + 2 6x2 =
2
2
2
√
√
=
5 − 2 6x1 + 5 + 2 6x2
Ясно, что ∀x = 0√выполняется неравенство ω(x) > 0.
При a = 5 + 2 6 рассуждения проводятся аналогичным образом.
Получаем окончательный
ответ:
является положительно опре√ форма
√
9
8
деленной при a ∈ 5 − 2 6, 5 + 2 6 .
10.7. Решение.
Преобразуем выражение, введя интегрирование по вспомогательной
переменной t:
:1 & n :1
n
'2
xi xj
i+j−2
xi xj t
dt =
xi ti−1 dt.
=
i + j − 1 i,j=1
i,j=1
i=1
n
0
Как легко видеть, выражение
0
&
n
i=1
xi ti−1
'2
всегда больше нуля при нену-
левых значениях x1 , x2 , . . . , xn и t > 0.
Исходная квадратичная форма является положительно определенной, поскольку является интегралом от положительно определенной формы.
Глава 11
Кривые второго порядка
Общее уравнение кривой второго порядка имеет вид
Ax2 + 2Bxy + Cy 2 + 2Dx + 2Ey + F = 0,
(11.1)
где вещественные коэффициенты A, B, C не равны нулю одновременно.
Выражение Ax2 + 2Bxy + Cy 2 называется квадратичной частью
уравнения этой кривой, 2Dx + 2Ey — линейной частью, а F — свободным членом.
В так называемой канонической системе координат уравнение
кривой второго порядка приобретает наиболее простой канонический
вид [38].
Рассмотрим классификацию кривых второго порядка на основе их
канонического вида.
11.1.
Эллипс
Эллипсом называется кривая второго порядка, которая в некоторой
декартовой прямоугольной системе координат определяется уравнением
x2 y 2
+
= 1,
a2 b 2
(11.2)
где a b > 0. О числах a и b говорят как о большой и малой полуосях
эллипса соответственно.
Точки
√ (±a, 0) и (0, ±b) называются вершинами эллипса, а (±c, 0),
где c = a2 − b2 , — его фокусами. Будем обозначать фокусы через F1
и F2 . На рис. 11.1 схематично изображен эллипс в канонической системе
координат.
При равенстве констант a = b эллипс вырождается в окружность.
Powered by TCPDF (www.tcpdf.org)
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
371
y
b
−a
F2
F1
−c
c
a
x
−b
Рис. 11.1. Эллипс
x2 y 2
+
= 1. Директрисы x = ±a/ε изображены
a2 b2
пунктирными линиями
С геометрической точки зрения эллипс есть множество точек плоскости, для каждой из которых сумма расстояний до двух данных точек F1
и F2 (фокусов) постоянна и равна 2a > F1 F2 . Фокусное расстояние,
т. е. расстояние между F1 и F2 , равно 2c.
Неотрицательное число ε = c/a < 1 определяет меру «сжатия» эллипса по оси абсцисс и называется эксцентриситетом. Чем больше значение ε, тем более выражено «сжатие» (см.
√ рис. 11.2). Как легко видеть,
эксцентриситет окружности равен ε = a2 − b2 /a = 0. В связи с этим
можно сказать, что эллипс получается из окружности сжатием ее по оси
Ox, при котором ординаты всех ее точек уменьшаются в одном и том же
отношении b/a.
Теорема 11.1. Расстояние от произвольной точки P (x, y), принадлежащей эллипсу, до каждого из фокусов равно
r1 = P F1 = a − εx,
r2 = P F2 = a + εx.
(11.3)
У эллипса есть две директрисы — прямые вида x = ±a/ε. На
рис. 11.1 они изображены пунктиром. Для окружности директрисы не
определены. Директрису и фокус, которые лежат по одну сторону от оси
Oy, будем считать соответствующими друг другу.
Теорема 11.2. Для любой точки, принадлежащей эллипсу, отношение ее расстояния до фокуса к расстоянию до соответствующей директрисы равно эксцентриситету эллипса.
372
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
a
y
a
x
Рис. 11.2. Эллипсы с различными эксцентриситетами: ε = 0 (сплошная
линия), ε = 0.7 (пунктирная линия), ε = 0.9 (штрих-пунктирная линия)
Рассмотрим взаимное расположение эллипса и прямой. Произвольная прямая либо не пересекает эллипс, либо пересекает его в одной или
двух точках. В случае наличия единственной общей точки такая прямая
является касательной. Через любую точку на эллипсе проходит ровно
одна касательная.
Уравнение касательной к эллипсу в точке P0 (x0 , y0 ) имеет вид:
xx0 yy0
+ 2 = 1.
a2
b
(11.4)
Эллипс обладает следующим оптическим свойством: световые лучи, исходящие из одного фокуса, после зеркального отражения от эллипса пройдут через другой фокус, т. е. сфокусируются в нем. Этим
объясняется происхождение термина «фокус», пришедшего из оптики.
Пример 11.1. Найдем точки пересечения с осями координат касатель√
x2 y 2
ной, проведенной к эллипсу + = 1 в точке с координатами (3/2, 3).
9 4
Решение.
Обозначим точку касания через P0 и проверим, что она принадлежит
эллипсу:
√
(3/2)2 ( 3)2
= 1, или 1 = 1 — верно.
(11.5)
+
9
4
Учитывая, что полуоси эллипса равны a = 3 и b = 2, подставим
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
373
координаты P0 (x0 , y0 ) в уравнение касательной (11.4):
√
(3/2)x
3y
= 1.
+
9
4
(11.6)
√
Следовательно, общее уравнение прямой имеет вид 2x + 3 3y − 12 = 0
(см. рис. 11.3).
√ Точки пересечения этой прямой с осями координат суть
(6, 0) и (0, 4/ 3).
√
2x + 3 3y − 12 = 0
y
2
P0
−3
3
x
−2
x2 y 2
+
= 1 и касательная к нему в
9
4
√
точке P0 (3/2, 3)
Рис. 11.3. К примеру 11.1. Эллипс
Представление об эллипсе как о подвергнутой сжатию окружности
приводит к альтернативному способу задания эллипса в параметрическом виде.
Проведем преобразование координат согласно формулам
x = x,
b
y = y.
a
(11.7)
Окружность x2 + y 2 = a2 после такого преобразования перейдет в
(x )2 (y )2
новой системе координат в эллипс 2 + 2 = 1. Как известно, наприa
b
мер, из курса математического анализа [80], любая окружность может
быть задана в параметрической форме как
x = a cos t,
(11.8)
y = a sin t,
374
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
где вещественное число t принимает значения, принадлежащие промежутку [0, 2π).
Из (11.7) следует, что параметрическое представление эллипса с полуосями a и b будет иметь вид:
x = a cos t,
где 0 t < 2π.
(11.9)
y = b sin t,
Параметр t называют аномалией эксцентриситета.
11.2.
Гипербола
Гиперболой называется кривая второго порядка, которая в некоторой декартовой прямоугольной системе координат определяется уравнением
x2 y 2
−
= 1,
(11.10)
a2 b2
где a, b > 0 (см. рис. 11.4). Числа a и b называются вещественной и
мнимой полуосями гиперболы соответственно.
y
F2−a
−c
a F1
c
x
x2
y2
b
−
= 1. Асимптоты y = ± x изображены
2
2
a
b
a
a
тонкими сплошными линиями, директрисы x = ± — пунктирными
ε
Рис. 11.4. Гипербола
В отличие от эллипса, представляющего собой связную кривую, гипербола состоит из двух компонент связности: левой и правой ветви.
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
375
Вершинами гиперболы называются точки (±a, 0).√Фокусами гиперболы называются точки F1 (−c, 0) и F2 (c, 0), где c = a2 + b2 .
b
У гиперболы существуют асимптоты y = ± x, определяющие ход
a
кривой для бесконечно больших значений координат.
Гипербола содержит те и только те точки декартовой плоскости, модуль разности расстояний каждой из которых до двух данных точек F1
и F2 (фокусов) постоянен и равен 2a < F1 F2 . Фокусное расстояние равно
2c.
Для гиперболы также вводится понятие эксцентриситета ε = c/a >
> 1.
Теорема 11.3. Расстояния r1 , r2 от произвольной точки P (x, y)
гиперболы до каждого из фокусов равны
r1 = P F1 = abs(a − εx),
r2 = P F2 = abs(a + εx).
(11.11)
Директрисы гиперболы задаются в канонической системе коордиa
a
нат уравнениями x = и x = − (см. рис. 11.4, на котором директрисы
ε
ε
изображены пунктирными линиями). Будем считать директрису и фокус, лежащие по одну сторону от оси Oy, соответствующими друг другу.
Теорема 11.4. Для произвольной точки, лежащей на гиперболе,
отношение ее расстояния до фокуса к расстоянию до соответствующей директрисы равно эксцентриситету гиперболы.
Уравнение касательной к гиперболе в точке P0 (x0 , y0 ) имеет вид:
xx0 yy0
− 2 = 1.
a2
b
(11.12)
Оптическое свойство гиперболы: свет от источника, находящегося в одном из фокусов гиперболы, отражается второй ветвью гиперболы
таким образом, что продолжения отраженных лучей пересекаются во
втором фокусе.
Как для эллипса, так и для гиперболы в канонической системе координат начало координат O(0, 0) является центром симметрии кривой,
поэтому эллипс и гипербола принадлежат классу центральных кривых.
В заключение раздела, посвященному гиперболе, приведем ее представление в параметрическом виде:
x = ±a ch t,
(11.13)
y = b sh t,
376
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
где t ∈ R, ch x = (ex + e−x )/2 — гиперболический косинус, sh x = (ex −
e−x )/2 — гиперболический синус. В первом уравнении этой системы знак
«+» соответствует правой ветви гиперболы, знак «−» — левой ветви.
11.3.
Парабола
Парабола есть нецентральная кривая второго порядка, определяемая
каноническим уравнением в декартовой системе координат
y 2 = 2px,
(11.14)
где p > 0 — фокальный параметр параболы, или просто параметр.
Вершиной параболы является начало координат (0, 0), фокусом —
точка F (p/2, 0). Директрисой параболы называется прямая, задаваемая уравнением x = −p/2 (рис. 11.5).
y
F
−p/2
p/2
x
Рис. 11.5. Парабола y 2 = 2px. Директриса x = −p/2 изображена
пунктирной линией
С геометрической точки зрения парабола есть множество таких точек плоскости, для каждой из которых расстояние до фокуса F равно
расстоянию до директрисы. Расстояние от фокуса до директрисы равно
параметру.
Теорема 11.5. Расстояние от точки P (x, y), лежащей на параболе,
до ее фокуса равно
r = x + p/2.
(11.15)
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
377
Параболе приписывают эксцентриситет, равный единице.
Для параболы аналог теорем 11.2 и 11.4 повторяет ее геометрическое
свойство, что позволяет сформулировать следующее обобщенное утверждение.
Теорема 11.6. Для произвольной точки, лежащей на эллипсе, гиперболе или параболе, отношение расстояния от этой точки до фокуса
к расстоянию до соответствующей директрисы (до единственной директрисы в случае параболы) равно эксцентриситету кривой.
Уравнение касательной к параболе в точке P0 (x0 , y0 ) имеет вид:
yy0 = p(x + x0 ).
(11.16)
Оптическое свойство параболы: световые лучи, исходящие из фокуса, после зеркального отражения от параболы будут направлены параллельно ее оси симметрии. Заметим, что это свойство параболы лежит в основе устройства параболических зеркал и параболических антенн [11].
11.4.
Вырожденные кривые
К вырожденным кривым второго порядка относятся те кривые, канонический вид которых отличен от уравнения эллипса, параболы или
гиперболы. Существуют следующие варианты таких кривых: мнимый
эллипс, пара пересекающихся прямых, пара мнимых пересекающихся
прямых, пара параллельных прямых, пара мнимых параллельных прямых, пара совпадающих прямых. Таким образом, невырожденные кривые второго порядка — это эллипс, гипербола и парабола (и только они).
11.4.1.
Мнимый эллипс
Мнимый эллипс описывается в канонической системе координат уравнением
x2 y 2
+
= −1,
(11.17)
a2 b2
где a b > 0.
Поскольку сумма квадратов вещественных чисел не может равняться отрицательному числу, то данная кривая не содержит ни одной точки. Термин «мнимый эллипс»
связан с тем, что при замене переменных
√
x = ix, y = iy, где i = −1, в новых координатах получим уравнение
эллипса (11.2).
378
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
11.4.2.
Пара пересекающихся прямых
Уравнению вида
x2 y 2
−
=0
a2 b 2
(11.18)
соответствует пара пересекающихся прямых. Точкой их пересечения является начало координат.
Записав уравнение (11.18) в виде
&x
a
−
y ' &x y '
+
= 0,
b
a b
(11.19)
делаем вывод, что ему удовлетворяют все точки двух пересекающихся в
начале координат прямых y = bx/a и y = −bx/a.
11.4.3.
Пара мнимых пересекающихся прямых
Пара мнимых пересекающихся прямых описывается уравнением
x2 y 2
+
= 0.
a2 b 2
(11.20)
Сумма квадратов равна нулю тогда и только тогда, когда каждое из
x
y
слагаемых равно нулю: = 0 и = 0, т. е. x = y = 0. Это условие задает
a
b
единственную точку, совпадающую с началом координат.
11.4.4.
Пара параллельных прямых
Уравнение
x2 − a2 = 0, где a = 0,
(11.21)
определяет две параллельные вертикальные прямые x = a и x = −a.
11.4.5.
Пара мнимых параллельных прямых
Кривая второго порядка, задаваемая в канонический системе координат уравнением
(11.22)
x2 + a2 = 0
при условии a = 0, не содержит вещественных точек.
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
11.4.6.
379
Пара совпадающих прямых
Наконец, заключительный вариант уравнения, к которому может
быть приведено общее уравнение кривой второго порядка, имеет вид
x2 = 0.
(11.23)
Данному уравнению удовлетворяют координаты всех точек, лежащих
на оси ординат.
В итоге, на основе канонического вида кривых второго порядка их
разделяют на девять указанных выше классов, важнейшими из которых
для практического использования являются эллипс, гипербола и парабола.
11.5.
Алгоритм вычисления координат
точек касания кривой второго порядка
и прямой
Рассмотрим невырожденную кривую второго порядка, например, элx2 y 2
липс 2 + 2 = 1, и произвольную точку декартовой плоскости P1 (x1 , y1 ).
a
b
Приведем алгоритм, вычисляющий координаты точек касания указанной кривой и прямых, проходящих через P1 (см. рис. 11.6).
y
P1
T2
b
−a
T1
a
x
−b
Рис. 11.6. Касательные к эллипсу
x2 y 2
+ = 1, проведенные из точки P1
a2 b 2
380
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Начнем с вывода аналитических соотношений для координат искомых точек. Обозначим точки касания через T1 (xt1 , yt1 ) и T2 (xt2 , yt2 ). В главе 7 «Уравнение прямой на плоскости» показано, что уравнение семейства прямых, проходящих через заданную точку P (x1 , y1 ), можно записать в виде y − y1 = k(x − x1 ), где k < ∞ — угловой коэффициент.
Случай вертикальной касательной будет рассмотрен ниже отдельно.
Известно, что касательная к эллипсу пересекает его ровно в одной
точке (см. с. 371). Следовательно, неизвестный угловой коэффициент k
принимает такое значение, что нелинейная система уравнений
⎧
⎨y − y1 = k(x − x1 ),
2
2
(11.24)
⎩x + y = 1
2
2
a
b
имеет единственное решение. Подставив первое уравнение этой системы
во второе, получим квадратное уравнение
(a2 k 2 + b2 )x2 − 2a2 k(kx1 − y1 )x + a2 (kx1 − y1 )2 − a2 b2 = 0.
(11.25)
Необходимым и достаточным условием того, что квадратное уравнение имеет единственный корень, является равенство нулю дискриминанта
D = a4 k 2 (kx1 − y1 )2 + a2 (a2 k 2 + b2 )(b2 − (kx1 − y1 )2 ) =
= a2 b2 (a2 k 2 + b2 − (kx1 − y1 )2 ) = 0. (11.26)
Решение уравнения D = 0 относительно переменной k дает возможность записать значения углового коэффициента:
/
x1 y1 ± b2 x21 + a2 y12 − a2 b2
.
(11.27)
k=
x21 − a2
Далее рассмотрим три случая в зависимости от взаиморасположения
точки P1 и эллипса.
x2
y2
1) Точка P1 лежит внутри эллипса, т. е. 21 + 21 < 1. Подкоренное
a
b
выражение x21 b2 + y12 a2 − a2 b2 в (11.27) отрицательно, и вещественных k в
таком случае нет. Следовательно, через точку P1 , находящуюся внутри
эллипса, касательную провести нельзя.
x2
y2
2) Точка P1 лежит на эллипсе, т. е. 21 + 21 = 1. Тогда у уравнеa
b xy
1 1
ния (11.26) имеется единственный корень k = 2
, и P1 является
x 1 − a2
точкой касания.
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
381
x2 y 2
3) Точка P1 лежит вне эллипса, 21 + 21 > 1. В этом случае имеется
a
b
два возможных значения k, отвечающих двум касательным. Координаты
точек касания найдем, подставив (11.27) в уравнение (11.25):
xt1,2 =
a2 k(kx1 − y1 )
,
b2 + a2 k 2
yt1,2 = −
b2 (kx1 − y1 )
.
b2 + a2 k 2
(11.28)
Рассмотрим теперь особый случай, когда x1 = ±a, и одна из касательных вертикальна (см. рис. 11.7).
y
P1
b
−a
a
x
−b
x2 y 2
+ 2 = 1 в случае, когда одна из
a2
b
них вертикальна
Рис. 11.7. Касательные к эллипсу
При этом одна из точек касания имеет координаты (a, 0) или (−a, 0), а
вторая рассчитывается исходя из уравнения D = 0, приводящего к усло& b2 − y 2 2b2 y '
y 2 − b2
1
1
вию k = ± 1
и, как следствие, к координатам ± a 2
,
,
2ay1
b + y12 b2 + y12
если y1 = 0, и к уравнению x = ±a, если y1 = 0.
В итоге, сформулируем алгоритм определения координат точек касания прямой и эллипса.
x2 y 2
I) Если 21 + 21 < 1, то точек касания нет.
a
b
x21 y12
II) Если 2 + 2 = 1, то есть единственная точка касания (x1 , y1 ).
a
b
III) Если x1 = ±a, то есть две точки касания
&
b2 − y12 2b2 y1 '
,
.
(x1 , 0) и ± a 2
b + y12 b2 + y12
382
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Во всех других случаях вычисляются k1 и k2 по формулам:
/
/
x1 y1 + b2 x21 + a2 y12 − a2 b2
x1 y1 − b2 x21 + a2 y12 − a2 b2
k1 =
, k2 =
,
x21 − a2
x21 − a2
(11.29)
и искомые точки касания будут иметь координаты:
2
2
a k1 (k1 x1 − y1 ) b2 (k1 x1 − y1 )
a k2 (k2 x1 − y1 ) b2 (k2 x1 − y1 )
,− 2
,
,− 2
.
b2 + a2 k12
b + a2 k12
b2 + a2 k22
b + a2 k22
(11.30)
Пример 11.2. Применим представленный выше алгоритм для значений параметров
a =8, b = 5 и P1 (6, 5). Получим координаты двух точек
192 7
касания: T1
,
и T2 (0, 5).
25 5
Контрольные вопросы к главе «Кривые
второго порядка»
1. Запишите общее уравнение кривой второго порядка.
2. Какая кривая называется эллипсом?
3. Что такое эксцентриситет эллипса?
4. Дайте определение директрис эллипса.
5. Расскажите про оптическое свойство эллипса.
6. Какая кривая называется гиперболой?
7. Чему равен эксцентриситет гиперболы?
8. Дайте определение директрис гиперболы.
9. Расскажите про оптическое свойство гиперболы.
10. Какая кривая называется параболой?
11. Чему равен эксцентриситет параболы?
12. Как определяется директриса параболы?
13. Расскажите про оптическое свойство параболы.
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
383
14. Запишите уравнение касательной к эллипсу, к гиперболе, к параболе.
15. Какие кривые второго порядка относят к вырожденным?
Задачи для самостоятельного решения
y2
x2
+
= 1 вычислите эксцентриситет и запишите
18
9
уравнения директрис.
11.1. Для эллипса
11.2. Найдите кратчайшее расстояние от эллипса
x2 y 2
+ = 1 до прямой:
4
3
1) x + 2y − 5 = 0;
2) 2x + y − 5 = 0.
11.3. Дан эллипс x2 + 4y 2 = 5. Найдите уравнение прямой, которая касается этого эллипса в точке с координатами x = 1, y = −1.
11.4. Найдите угол между касательными, проведенными из точки (−8, 2)
x2 y 2
+
= 1.
к эллипсу
24 12
∗ 11.5. Из каких точек декартовой координатной плоскости эллипс
+
y2
= 1 виден под прямым углом?
b2
x2
+
a2
11.6. У равносторонней гиперболы полуоси равны: a = b. Найдите
эксцентриситет равносторонней гиперболы.
11.7. Найдите угол между асимптотами гиперболы
x2 y 2
−
= 1.
a2 b 2
11.8. Найдите расстояние от точки (4, 0) до кривой y 2 − 2x = 0.
11.9. Напишите уравнение касательной к параболе y 2 = 5x в точке, ближайшей к точке M0 (2, 1/2).
11.10. Представление гиперболы в параметрической форме вида (11.13)
обладает тем недостатком, что ее левая и правая ветви описываются разными выражениями, отличающимися знаком. Найдите параметрическое задание гиперболы, не обладающее указанным недостатком.
384
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
∗ 11.11. Пусть известно, что прямая Ax + By + C = 0 касается эллипса,
фокусное расстояние которого равно 2c. Составьте уравнение этого
эллипса.
11.12. Определите, в каких точках пересекаются прямая −3x + 3y − 2 = 0
x2 y 2
= 1.
+
и эллипс
2
4
√
11.13. В каких точках пересекаются прямая x − 3y − 2 + 3 3 = 0 и гипербола x2 − y 2 = 1?
√
11.14. В каких точках пересекаются прямая x + y − 5 5 = 0 и парабола
y 2 = 6x?
11.15. Эксцентриситет орбиты планеты Меркурий равен 0,2, большая полуось равна 0,39 астрономических единиц (а. е.). Вычислите наибольшее и наименьшее расстояние планеты от Солнца.
11.16. Эксцентриситет земной орбиты равен 0,017, большая полуось составляет одну астрономическую единицу. Чему равно наибольшее
и наименьшее расстояние от Земли до Солнца?
11.17. Пусть известно, что эксцентриситет эллипса ε = 1/2. В канонической системе координат одна из его директрис задается уравнением
x = 12. Вычислите расстояние в этой системе координат от точки
M1 эллипса с абсциссой, равной −1, до фокуса, одностороннего с
данной директрисой.
11.18. Пусть известно, что эксцентриситет гиперболы ε = 3/2. В канонической системе координат одна из ее директрис задается уравнением x = −4. Вычислите расстояние от точки N1 гиперболы с
ординатой, равной 9, до фокуса, одностороннего с данной директрисой.
∗ 11.19. Найдите площадь области, ограниченной эллипсом
x2 y 2
+ 2 =1и
a2
b
x2 y 2
−
= 1 (см. рис. 11.8, где указанная
α2 β 2
область выделена заливкой).
правой ветвью гиперболы
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
385
y
b
∗
−a
−α
α
M (xm , ym )
a
x
−b
Рис. 11.8. Область, ограниченная эллипсом и правой ветвью гиперболы
Ответы и решения к главе «Кривые второго
порядка»
11.1. Решение.
√
Полуоси эллипса равны a = 18 и b = 3. Вычислим эксцентриситет
эллипса:
√
√
a2 − b2
18 − 9
c
1
= √
=√ .
ε= =
a
a
18
2
Запишем уравнения директрис:
a
x = ± или x = ±6.
ε
11.2. Решение.
1) Найдем уравнения двух прямых, касательных к эллипсу и параллельных прямой x+2y−5 = 0. Для этого запишем уравнение касательной
к эллипсу:
x 0 x y0 y
+ 2 = 1,
a2
b
где (x0 , y0 ) — точка касания, a2 = 4, b2 = 3. Таким образом, уравнение
касательной принимает вид:
y=−
3
3x0 x
+ .
4y0
y0
1
Угловой коэффициент прямой x + 2y − 5 = 0 равен k = − . Как
2
известно, у параллельных прямых угловые коэффициенты совпадают.
386
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
3x0 x
1
= − . Кроме того, точка
4y0
2
(x0 , y0 ) принадлежит эллипсу. В результате получаем систему уравнений:
⎧
3x
1
⎪
⎨− 0 = − ,
4y0
2
2
2
y
x
⎪
⎩ 0 + 0 = 1.
4
3
Следовательно, выполняется равенство −
Множество ее решений имеет вид {(1, 3/2) , (−1, −3/2)}.
Получаем уравнения касательных:
x + 2y − 2 = 0,
x + 2y + 2 = 0.
Заметим, что первая из них расположена ближе к исходной прямой,
так как выполняется неравенство abs((−2) − (−5)) < abs(2 − (−5)) (см.
упр. 7.13).
Осталось только найти расстояние от точки (1, 3/2) до прямой x +
+2y − 5 = 0.
Воспользуемся формулой (7.37):
3
√
5
abs(Ax0 + By0 + C) abs(1 · 1 + 2 · 2 − 5)
√
√
.
=
=
d = abs(δ) =
5
A2 + B 2
12 + 22
y2
x2
= 1 до прямой
+
Итак, кратчайшее расстояние от эллипса
4
3
√
5
x + 2y − 5 = 0 равно
.
5
2) Найдем уравнения двух прямых, касательных к данному эллипсу и параллельных прямой 2x + y − 5 = 0. Аналогично предыдущему
пункту данного упражнения, получаем систему уравнений относительно
неизвестных координат точки касания x0 и y0 :
⎧
3x
⎪
⎨− 0 = −2,
4y0
2
2
x
⎪
⎩ 0 + y0 = 1.
4
3
;
<
8
3
8
3
√ ,√
Получаем множество решений
, −√ , −√
. Опре19 19
19
19
деляем уравнения касательных:
√
√
y = −2x + 19, y = −2x − 19.
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
387
Заметим, что первая из√них ближе к исходной
√ прямой, так как выпол<
abs(
19 − (−5)) (см. упр. 7.13).
няется неравенство abs(− 19 − (−5))
8
3
Расстояние от точки √ , √
до прямой 2x + y − 5 = 0 находим
19 19
по формуле (7.37):
3
8
√
√
abs(2 · √ + 1 · √ − 5)
5 5 − 95
abs(Ax0 + By0 + C)
19
19
√
√
=
=
.
d=
5
A2 + B 2
22 + 1 2
x2 y 2
= 1 до прямой
+
В итоге, кратчайшее расстояние от эллипса
4
3
√
1√
2x + y − 5 = 0 равно 5 −
95.
5
11.3. Решение.
Воспользуемся уравнением касательной к эллипсу (11.4):
xx0 yy0
+ 2 = 1.
a2
b
5
В нашем случае a2 = 5, b2 = , x0 = 1, y0 = −1, и уравнение касательной
4
x · 1 y · (−1)
+
= 1, или x − 4y − 5 = 0.
принимает вид
5
5/4
11.4. Решение.
Согласно условию задачи, через точку (−8, 2) проходят обе касательные к эллипсу.
Как показано в разделе 11.5 (формула (11.27)), угловые коэффициенты касательных k1 и k2 вычисляются по формуле
/
x1 y1 ± b2 x21 + a2 y12 − a2 b2
k1,2 =
.
x21 − a2
Получаем: k1 = 1/5, k2 = −1.
На основании (7.17) находим угол между прямыми.
ϕ = arctg
3
k1 − k2
1/5 − (−1)
= .
= arctg
1 + k 1 k2
1 + (1/5)(−1) 2
3
Следовательно, угол между касательными к эллипсу равен ϕ = arctg .
2
388
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
11.5. Решение.
Поскольку эллипс из некоторой точки M (x, y) виден под прямым углом, то угол между касательными, проведенными из M к эллипсу, равен
π/2. На основании формулы (11.27) (см. с. 380) угловые коэффициенты
касательных k1 и k2 равны
/
x1 y1 ± b2 x21 + a2 y12 − a2 b2
k1,2 =
.
x21 − a2
Вычислим угол ϕ между касательными, используя уравнение (7.17):
tg ϕ =
k1 − k2
,
1 + k 1 k2
следовательно,
/
2 b2 x21 + a2 y12 − a2 b2
k1 − k2
= arctg
.
ϕ = arctg
1 + k 1 k2
x21 + y12 − a2 − b2
Из полученного уравнения вытекает, что угол ϕ = π/2, если знаменатель
дроби под знаком арктангенса равен нулю: x21 + y12 − a2 − b2 = 0.
x2 y 2
В итоге, эллипс 2 + 2 = 1 виден под прямым углом из всех точек
a
b
плоскости, удовлетворяющих уравнению
x2 + y 2 = a2 + b2 .
Такие
точки, как несложно заметить, образуют окружность радиуса
√
a2 + b2 .
11.6. Решение.
√
c
Эксцентриситет гиперболы равен ε = , где c = b2 + a2 — половина
a
межфокусного расстояния, a, b — полуоси гиперболы.
Если a = b, то
√
√
b2 + a2
a2 + a2 √
=
= 2.
ε=
a
a
Таким√
образом получено, что эксцентриситет равносторонней гиперболы
равен 2.
11.7. Решение.
x2 y 2
− 2 = 1, как известно (см. с. 375), опреa2
b
b
деляются уравнениями y = ± x. Угловые коэффициенты наклона этих
a
Асимптоты гиперболы
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
389
b
прямых равны ± . Следовательно, тангенс половины угла α между асимпa
b
тотами равен tg(α/2) = . Выражаем из полученного соотношения исa
комый угол:
b
α = 2 arctg .
a
Заметим, что у равносторонней гиперболы (см. упр. 11.6) угол между
асимптотами равен π/2.
11.8. Решение.
Для того чтобы найти расстояние от точки (x0 , y0 ) до кривой y 2 −
−2x = 0, определим наименьшее значение функций
/
d1 (x) = (x − x0 )2 + (f1 (x) − y0 )2 и
/
d2 (x) = (x − x0 )2 + (f2 (x) − y0 )2 ,
√
где x0 = 4, y0 = 0, и через f1,2 (x) = ± 2x обозначены две ветви параболы y 2 − 2x = 0.
/
Рассмотрим сначала функцию d1 (x): d1 (x) = (x − 4)2 + 2x. Ее проx−3
изводная равна d1 (x) = /
. Точка, подозрительная на экс(x − 4)2 + 2x
тремум, является решением уравнения d1 (x) /
= 0, или x − 3 = 0.
√ Это
точка минимума. Следовательно, min d1 (x) = (3 − 4)2 + 2 · 3 = 7.
Аналогичным
образом находим наименьшее значение функции d2 (x):
√
min d2 (x) = 7.
√ В итоге получаем, что расстояние от точки (4, 0) до параболы равно
7.
√
11.9. Ответ: 5x − 2 10y + 10 = 0.
11.10. Ответ:
a
,
cos t
y = b tg t,
x=
где t ∈ (0, 2π).
11.11. Решение.
Обозначим точку касания через P (x0 , y0 ). Уравнение касательной к
эллипсу в этой точке имеет вид:
xx0 yy0
+ 2 = 1,
a2
b
390
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
где a и b — больша́я и малая полуоси эллипса соответственно. С другой
стороны, согласно условию задачи, общее уравнение прямой имеет вид
Ax + By + C = 0, и его можно переписать как
& B'
& A'
x+ −
y = 1.
−
C
C
A y0
B
x0
=− , 2 =− ,
2
C b
C
a
следовательно, координаты точки касания P равны −Aa2 /C, −Bb2 /C .
x2
Ясно, что координаты точки P удовлетворяют уравнению эллипса 20 +
a
y02
2
+ 2 = 1. Кроме того, из определения фокуса следует равенство a −b2 =
b
= c2 , где c — фокальный параметр. Отсюда получаем систему уравнений
относительно параметров a, b:
⎧ &
Aa2 '2 1 & Bb2 '2
⎨1
−
+ 2 −
= 1,
a2
C
b
C
⎩a2 − b2 = c2 ,
Сравнивая уравнения (11.5.) и (11.5.), получим:
⎧ 2 2
b2 B 2
⎨a A
+
= 1,
C2
C2
⎩a2 − b2 = c2 .
& C 2 − c2 A2 '1/2
& C 2 − c2 B 2 '1/2
,
b
=
.
Решение этой системы: a =
A2 + B 2
A2 + B 2
Таким образом, искомое уравнение эллипса имеет вид:
или
A2 + B 2 2
A2 + B 2 2
x
+
y = 1.
C 2 − c2 B 2
C 2 − c2 A2
11.12. Решение.
2
Выразим y из уравнения прямой: y = x + .
3
Подставляем y в уравнение эллипса:
x2 1 4 4
+ ( + · x + x2 ) = 1,
2
4 9 3
14
4
8
; x2 = − ,
или 27x2 + 12x − 32 = 0, отсюда получаем x1 = , y1 =
9
9
3
2
y2 = − .
3
Итак, точки пересечения прямой и эллипса: (8/9, 14/9), (−4/3, −2/3).
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
391
11.13. Решение.
√
Выразим переменную x: x = 3y + 2 − 3 3.
Для того чтобы найти точки, в которых пересекаются прямая и гипербола, подставим полученное выражение для x в уравнение гиперболы:
√
√
9y 2 + 6y(2 − 3 3) + 31 − 12 3 − y 2 − 1 = 0,
или
√
√
8y 2 + y(12 − 18 3) + 30 − 12 3 = 0,
√
√
√
5 3−6
3 3 − 10
отсюда: y1 =
, x1 =
; y2 = 3, x2 = 2.
4
4
& 3√3 − 10 5√3 − 6 '
Таким образом, искомые точки пересечения:
,
,
4
4
√
(2, 3).
11.14. Решение.
Для того чтобы найти точки пересечения прямой и параболы, решим
систему уравнений:
√
√
√
x + y − 5 5 = 0,
x = −y + 5 5,
√ ⇒ y 2 + 6y − 30 5 = 0,
⇒
2
2
y = 6x
y = −6y + 30 5
Полученное квадратное уравнение имеет корни
2
√
y1,2 = −3 ± 9 + 30 5.
√
Подставим значения y1,2 в уравнение прямой x + y − 5 5 = 0. Получим:
2
√
√
x1,2 = 3 ∓ 9 + 30 5 + 5 5.
Таким образом,
точек пересечения:
/ координаты
/
√
√
√
M1 (3 − /9 + 30 5 + 5 5, −3 + /9 + 30 5),
√
√
√
M2 (3 + 9 + 30 5 + 5 5, −3 − 9 + 30 5).
11.15. Решение.
Согласно первому закону Кеплера1 , все планеты Солнечной системы
движутся по эллипсам, в одном из фокусов которых находится Солнце [40, 11]. Наиболее близкая к Солнцу точка орбиты P называется перигелием, а наиболее удаленная от Солнца точка орбиты A — афелием.
1
Кеплер (Johannes Kepler) (1571–1630) — немецкий математик и астроном.
392
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Чтобы вычислить эти величины для планеты Меркурий, введем обозначения: F1 (c, 0) — координаты Солнца, P (a, 0) — координаты перигелия орбиты, A(−a, 0) — координаты афелия орбиты, O(0, 0) — центр
симметрии эллипса. Здесь a — большая полуось, c — фокальный параметр.
Тогда:
ra = AF1 — наибольшее расстояние Меркурия от Солнца,
rp = P F1 — наименьшее расстояние Меркурия от Солнца,
c = OF1 .
Из геометрических соображений получаем:
a = rp + c,
a = ra − c;
⇒
rp = a − c,
ra = a + c;
Эксцентриситет эллипса ε вычислим по формуле:
√
a2 − b 2
ε=
,
a
√
где a2 − b2 = c,
c
ε = ⇒ c = aε.
a
Отсюда:
rp = a − aε,
ra = a + aε;
rp = a(1 − ε),
ra = a(1 + ε).
Подставим числовые значения из условия задачи:
rp = 0,39 · (1 − 0,2) ⇒ rp = 0,312 (а. е.),
ra = 0,39 · (1 + 0,2) ⇒ ra = 0,468 (а. е.).
Итак, наибольшее расстояние от Меркурия до Солнца равно 0,468 а. е.,
наименьшее — 0,312 а. е.
11.16. Решение.
Обозначим точки F1 (c, 0) — координаты Солнца, P (a, 0) — координаты перигелия орбиты, A(−a, 0) — координаты афелия орбиты, O(0, 0) —
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
393
центр симметрии эллипса. Здесь a — большая полуось, c — фокальный
параметр земной орбиты. Тогда (см. предыдущее упр.):
ra = AF1 ,
rp = P F 1 , ⇒
c = OF1 ;
rp = a(1 − ε),
ra = a(1 + ε);
где ε = 0,017 — эксцентриситет орбиты Земли, a = 1 а. е.
Проводим необходимые вычисления:
rp = 1 · (1 − 0,017) ⇒ rp = 0,983 (а. е.),
ra = 1 · (1 + 0,017) ⇒ ra = 1,017 (а. е.).
В итоге получаем, что наибольшее расстояние от Земли до Солнца равно
1,017 а. е., наименьшее расстояние равно 0,983 а. е.
11.17. Решение.
Точка M1 имеет координаты (−1, y1 ) и находится слева от оси Oy,
а фокус — справа. Искомое расстояние равно длине гипотенузы r треугольника с вершинами F1 (c, 0), M1 (−1, y1 ) и L(−1, 0).
По теореме Пифагора:
/
r = (c + 1)2 + y 2 .
a
Используя определение директрисы эллипса x = ± , находим:
ε
a
xd = ,
ε
⇒
a = εxd ,
где согласно условию задачи xd = 12.
Выразим фокальный параметр c эллипса:
c = aε = ε2 xd .
Координату y1 определим, воспользовавшись уравнением эллипса
(−1)2 y12
+ 2 = 1:
a2
b
b/ 2
y1 = ±
a − 1.
a
394
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
Поскольку для эллипса справедливо соотношение b2 = a2 −c2 = a2 (1−
−ε ), то
/
y1 = ± (1 − ε2 )(a2 − 1).
2
Следовательно, длина гипотенузы F1 M1 треугольника F1 LM1 равна
2
/
r = (c + 1)2 + y12 = (aε + 1)2 + (1 − ε2 )(a2 − 1) = a + ε = ε(xd + 1).
Подставляем сюда числовые значения из условия и получаем оконча13
тельный ответ: r = .
2
11.18. Решение.
Искомое расстояние равно длине гипотенузы треугольника с вершинами F2 (−c, 0), N1 (x1 , y1 ) и L(x1 , 0), где согласно условию задачи y1 = 9.
В зависимости от того, на правой или на левой ветви гиперболы расположена точка N1 (x1 , y1 ), получаем два возможных значения r:
2
r = (x1 ± c)2 + y12 .
По определению директрисы гиперболы x = ±
a
имеем:
ε
a = ε abs(xd ), где xd = −3.
Параметр c гиперболы равен
c = aε = ε2 abs(xd ).
Поскольку
(−1)2 y12
− 2 = 1 и c2 = a2 − b2 , то
a2
b
x21
− 1 = (a ± εx1 )2 = ε2 (abs(xd ) ± x1 )2 ,
2
a
0
y12
a/ 2
y 1 + b2 =
+ ε2 x2d . Подставив значения из условия,
где x1 =
2−1
b
ε
0
0
14
14
получим: r = 9
+ 6 или r = 9
− 6.
5
5
r2 = (x1 ± c)2 + b2
11.19. Решение.
Обозначим область, ограниченную эллипсом и гиперболой, через D.
В силу свойств симметрии эллипса и гиперболы искомая площадь выражается как удвоенная площадь области D0 :
S(D) = 2S(D0 ).
ГЛАВА 11. КРИВЫЕ ВТОРОГО ПОРЯДКА
395
На рис. 11.8 область D0 отмечена символом «∗».
Уравнение части эллипса, лежащей в первой координатной четверти,
b√ 2
a − x2 , где 0 < x < a.
имеет вид yell =
a
Уравнение части правой ветви гиперболы, расположенной выше оси
β√ 2
α − x2 , где x > α.
абсцисс: yhyp =
α
Пусть xM — абсцисса точки M пересечения кривых yell и yhyp , лежащей в первой четверти.
Заметим, что при выполнении условия a α такая точка всегда
существует. В противном случае, когда a < α, область D пуста, и S(D) =
= 0.
Итак, при условии a α справедливо равенство:
: xM
: a
yhyp (x) dx +
yell (x) dx.
(11.31)
S(D0 ) =
α
xM
Вычислим координату xM :
2
2
b
β
a2 − x2M =
x2M − a2 .
a
α
Решение этого уравнения, удовлетворяющее условиям x > 0, y > 0,
имеет вид:
1
b2 + β 2
.
xM = aα
a2 β 2 + b2 α2
yell (xM ) = yhyp (xM ) ⇒
Подстановка xM в формулу (11.31) для S(D0 ) дает:
1
(
β a2 + α 2
1
−
S(D0 ) = ab arctg
2
α b2 + β 2
1
)
1 2
a − α2
b2 + β 2
+a
.
− αβ ln b
a2 β 2 + α2 b2
a2 β 2 + α 2 b 2
Окончательно получаем площадь области, ограниченной эллипсом и
правой ветвью гиперболы:
⎧
⎪
0, если a α,
⎪
⎪
⎪
⎪
1
⎪
⎪
⎪
⎨
β a2 + α2
S(D) = ab arctg α b2 + β 2 −
⎪
1
* 1
+
⎪
⎪
⎪
⎪
a2 − α2
b2 + β 2
⎪
⎪
⎪
⎩ − αβ ln b a2 β 2 + α2 b2 + a a2 β 2 + α2 b2 , если a > α.
Глава 12
Эллиптические кривые
Эллиптическая кривая — это плоская кривая, не имеющая особых
точек, определяемая уравнением вида
y 2 = x3 + ax + b,
(12.1)
где a и b — вещественные числа. Требование отсутствия особых точек
означает, что кривая не должна иметь самопересечений и точек возврата1 . Это условие будет выполняться тогда и только тогда, когда отличен
от нуля дискриминант уравнения:
Δ = −16(4a3 + 27b2 ) = 0.
(12.2)
Разумеется, постоянный множитель 16 не влияет на знак дискриминанта,
этот множитель вводится для удобства исследования дальнейших, более
глубоких свойств кривой.
Название «эллиптическая кривая» восходит к задаче о вычислении
длины дуги эллипса, приводящей к вычислению определенного интеграла вида
: x2
R(x)
√
dx
(12.3)
x3 + ax + b
x1
для некоторой рациональной функции R(x) [37, 54]. Морфологическое
сходство терминов «эллипс» и «эллиптическая кривая» обусловлено историческими причинами. Подчеркнем, что эти термины относятся к разным математическим понятиям.
В качестве области применения эллиптических кривых следует упомянуть доказательство великой теоремы Ферма2 и открытие нового быстро развивающегося направления в науке о методах передачи конфиденциальных данных — криптографии эллиптических кривых (elliptic-curve
1
Пример точки самопересечения см. на рис. 12.6 на с. 418. Пример точки возврата приведен на
рис. 12.1,e на с. 398.
2
Ферма (Pierre de Fermat) (1601–1665) — французский математик и юрист.
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
397
cryptography). Известны и другие применения таких кривых в математике и смежных областях, в частности, в теории чисел [43, 53].
В зависимости от знака дискриминанта, эллиптическая кривая образована одной или двумя компонентами связности:
• если Δ > 0, то график кривой состоит из двух компонент связности;
• если Δ < 0, то график кривой состоит из одной компоненты связности.
Примечание. При выполнении условий Δ = 0 и a = 0 на кривой
возникает точка самопересечения, а если имеют место равенства a = b =
= 0 — возникает точка возврата.
Пример 12.1. На рис. 12.1 изображены несколько эллиптических кривых для значений параметров a ∈ {−4, 0, 4}, b ∈ {−2, 0, 2}. Заметим,
что при a = b = 0 получается уравнение y 2 = x3 , для которого Δ = 0,
следовательно, такая кривая не принадлежит классу эллиптических. На
рис. 12.1 она расположена на панели e) и изображена пунктиром.
12.1.
Операция сложения точек
эллиптической кривой
Зафиксировав две точки, расположенные на произвольной эллиптической кривой Γ = {(x, y) ∈ R2 : y 2 = x3 + ax + b}, можно ввести правило
для построения третьей точки. Такую операцию будем называть «сложением» точек на эллиптической кривой.
Для того чтобы выполнить операцию сложения точек, декартову плоскость R2 следует расширить с помощью введения бесконечно удаленной точки ∞. Как будет ясно из дальнейшего рассмотрения, точка ∞
обладает свойствами нулевого элемента в множестве R2 ∪ {∞} с определенной на нем операцией сложения точек. В связи с этим для бесконечно
удаленной точки также используется обозначение O ≡ ∞.
Будем предполагать, что любая эллиптическая кривая проходит через точку O. Можно сказать, что в этой точке пересекаются все вертикальные прямые.
Итак, пусть задана эллиптическая кривая
Γ = {(x, y) ∈ R2 : y 2 = x3 + ax + b} ∪ {O}.
(12.4)
398
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
y
a)
b)
y
x
x
y 2 = x3 − 4x − 2
d)
y 2 = x3 − 4x
y
e)
f)
x
y 2 = x3
y
y
x
y 2 = x3 − 2
h)
y 2 = x3 + 2
y
x
y 2 = x3 + 4x − 2
x
y 2 = x3 − 4x + 2
y
x
g)
y
c)
i)
y
x
y 2 = x3 + 4x
x
y 2 = x3 + 4x + 2
Рис. 12.1. Эллиптические кривые для значений параметров a ∈
∈ {−4, 0, 4}, b ∈ {−2, 0, 2}. Прямоугольная сетка на панелях a)–i ) выполнена с шагом, равным 2. На панели e) точка (0, 0) является точкой
возврата для кривой y 2 = x3
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
399
Основная идея определения суммы A ⊕ B двух точек A = (xA , yA ) и
B = (xB , yB ) на эллиптической кривой заключается в вычислении координат точки пересечения прямой AB с Γ:
C = A ⊕ B = {(xC , yC ) : C ∈ AB и C ∈ Γ}
(12.5)
и последующего отражения C относительно оси Ox: C → C. Точка
C считается суммой точек A и B, формальному определению операции
такого суммирования будет посвящена оставшаяся часть этого раздела.
При этом полагаем, что
1) вертикальные линии вида x = const проходят через бесконечно
удаленную точку;
2) если прямая AB касается кривой Γ, то точка касания учитывается
дважды.
Точкой на эллиптической кривой, противоположной точке A =
= (xA , yA ), называется точка −A = (xA , −yA ), полученная в результате отражения исходной точки относительно оси абсцисс. Как несложно
видеть, A ∈ Γ ⇒ −A ∈ Γ в силу квадратичной зависимости алгебраического уравнения, определяющего Γ, от переменной y.
Для бесконечно удаленной точки вводится особое правило: −∞ = ∞,
другими словами, точка ∞ считается противоположной самой себе.
Перейдем к правилу вычисления координат точки A ⊕ B. Для этого
рассмотрим четыре случая:
1) сложение точки с O;
2) сложение двух различных точек, причем A = −B;
3) сложение двух противоположных точек A и −A;
4) удвоение точки, т. е. вычисление суммы вида A ⊕ A.
12.1.1.
Сложение точки с O
Определим сумму произвольной точки A(xA , yA ) расширенной декартовой плоскости и точки O как
A ⊕ O = O ⊕ A = A.
(12.6)
Это означает, что прибавление точки O не изменяет значений координат
исходной точки. Как уже указывалось выше, данный факт позволяет
считать бесконечно удаленную точку нулевым элементом в множестве
R2 ∪ {∞} с определенной на нем операцией сложения.
400
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
12.1.2.
Сложение двух различных точек
Для вычисления суммы A ⊕ B при условии A = −B следует найти точку пересечения прямой AB с заданной эллиптической кривой Γ.
Обозначим соответствующую точку пересечения через C . Далее находим противоположную к C точку C = −C , выполняя отражение точки
C относительно оси Ox. Таким образом, координаты точек C и C связаны соотношениями xC = xC , yC = −yC .
Суммой точек A и B является точка C, построенная вышеизложенным образом:
C = A ⊕ B.
(12.7)
На рис. 12.2 изображен геометрический способ построения точки A ⊕
B.
y
−C
B
x
A
C =A⊕B
Рис. 12.2. Сложение двух различных точек A и B на эллиптической
кривой
Решение системы
⎧
⎨(−yC )2 = x3C + axC + b,
yB − y A
⎩(−yC ) − yA =
(xC − xA )
xB − xA
(12.8)
сводится к решению уравнения третьей степени с вещественными коэффициентами. Конечно, корни произвольного уравнения такого рода могут быть получены с помощью известных формул Кардано [62], однако
в данном случае удается провести вычисления более простым способом.
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
401
Используя формулы Виета (см. упр. 4.31), можно показать, что искомые координаты точки C определяются по формулам:
xC = κ 2 − xA − xB ,
yC = −yA + κ(xA − xC ),
где введено обозначение κ =
клона прямой AB.
12.1.3.
(12.9)
yB − yA
для коэффициента углового наxB − xA
Сложение двух противоположных точек
Перейдем к рассмотрению случая, когда слагаемые в сумме точек
представляют собой противоположные точки, например, A и −A.
Проведем прямую, проходящую через две противоположные точки.
Как можно видеть из рисунка 12.3, такая прямая будет расположена
вертикально, а третья точка, общая для эллиптической кривой и построенной прямой, может находиться только на бесконечности. На основании этого факта сумма противоположных точек определяется как
A ⊕ (−A) = ∞. Рисунок 12.3 иллюстрирует сформулированное правило.
y
O = A ⊕ (−A)
A
x
−A
Рис. 12.3. Сложение двух противоположных точек A и −A
402
12.1.4.
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
Удвоение точки
Вычисление суммы точек вида A ⊕ A, т. е. удвоение точки, потребует операции предельного перехода:
A ⊕ A = lim A ⊕ B.
B→A
(12.10)
Геометрически это означает, что мы проводим прямую через две различные точки A(xA , yA ) и B(xB , yB ) эллиптической кривой, причем вторая из этих точек лежит в малой окрестности первой:
A ⊕ B.
lim A ⊕ B = x lim
→x ,
B→A
B
A
(12.11)
yB →yA
Как видно из рис. 12.4, этот случай соответствует проведению касательной в точке A к эллиптической кривой.
Предположим, что касательная пересекает кривую в точке −C. Заметим, что если ордината точки A равна нулю, то указанная касательная
будет расположена вертикально. На основании предыдущего случая, изложенного в разделе 12.1.3, получаем: −C = ∞, A ⊕ A = A ⊕ (−A) = O.
Для всех остальных значений ординаты yA = 0 в результате операции
отражения точки −C относительно горизонтальной оси будет построена
точка C = A ⊕ A.
Выпишем соответствующие аналитические соотношения:
xC = κ 2 − 2xA ,
(12.12)
yC = −yA + κ(xA − xC ),
3x2A + a
равна тангенсу угла наклона касательной по
2yA
отношению к горизонтальной оси.
Два других случая удвоения точки, рассмотренные выше, проиллюстрированы на рис. 12.4 a), b).
Анализ сформулированной процедуры сложения приводит к критерию равенства O суммы трех точек.
Теорема 12.1. Сумма трех точек равна O тогда и только тогда,
когда они лежат на одной прямой.
Пример 12.2. Вычислите сумму (−2, −1) ⊕ (0, 1) двух точек на эллиптической кривой, определенной уравнением y 2 = x3 − 4x + 1.
Решение.
Обозначим A = (−2, −1), B = (0, 1) и C = A ⊕ B. Проверим, что
точки A и B лежат на кривой y 2 = x3 − 4x + 1.
где величина κ =
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
403
y
a)
y
O=A ⊕ A
b)
A
−C
A
x
x
A⊕A
Рис. 12.4. Удвоение точки A. На панели a) схематично изображен случай
yA = 0, на панели b) — случай yA = 0
В самом деле,
A : (−1)2 = (−2)3 − 4 · (−2) + 1, или 1 = 1 — верно,
B : 12 = 03 − 4 · 0 + 1, или 1 = 1 — верно.
(12.13)
(12.14)
По определению, для вычисления суммы A ⊕ B следует найти точку
пересечения прямой AB с заданной эллиптической кривой, после чего
отразить точку пересечения относительно оси Ox.
Запишем уравнение прямой, проходящей через две точки (см. уравнение (7.12) на с. 293):
y − yA =
yB − y A
(x − xA ),
xB − xA
(12.15)
где (xA , yA ) и (xB , yB ) — координаты исходных точек.
Подставив численные значения координат в уравнение (12.15), приходим к уравнению прямой y = x + 1. Прямая, задаваемая этим уравнением, пересекает эллиптическую кривую y 2 = x3 − 4x + 1 в точке с
абсциссой xC , для которой выполняется равенство
или
(xC + 1)2 = x3C − 4xC + 1
(12.16)
x3C − x2C − 6xC = 0.
(12.17)
Полученное кубическое уравнение, как легко видеть, имеет корни
(xC )1 = −2,
(xC )2 = 0,
(xC )3 = 3.
(12.18)
404
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
Первые два значения отвечают абсциссам исходных точек A и B,
значение xC = 3 является абсциссой точки пересечения прямой AB и
эллиптической кривой. Обозначим эту точку как C : xC = 3.
Подставив xC в уравнение y = x + 1, получим yC = 4 — ординату
точки C .
Координаты искомой точки C = A ⊕ B равны:
xC = x C ,
(12.19)
yC = −yC .
В итоге xC = 3, yC = −4, следовательно, на кривой y 2 = x3 − 4x + 1
выполняется равенство
(−2, −1) ⊕ (0, 1) = (3, −4).
(12.20)
Заметим, что использование соотношений (12.9) также приводит к
искомому результату.
Пример 12.3. Вычислите сумму (−2, 3) ⊕ (3, −3) двух точек на эллиптической кривой, заданной уравнением y 2 = x3 − 7x + 3.
Решение.
Проверим, что точки (−2, 3) и (3, −3) действительно принадлежат
кривой.
Первая точка: 32 = (−2)3 − 7(−2) + 3, или 9 = 9, — верно;
вторая точка: (−3)2 = 33 − 7 · 3 + 3, или 9 = 9, — верно.
Для вычисления суммы воспользуемся формулами (12.9), в которые
следует подставить значения xA = −2, yA = 3, xB = 3, yB = −3:
6
−3 − 3
=− ,
3 − (−2)
5
2
6
11
xC = −
− (−2) − 3 = ,
5
25
6
11
9
−2 −
=−
.
yC = − 3 + −
5
25
125
κ=
(12.21)
(12.22)
(12.23)
способом получено равенство (−2,3)⊕(3,−3) =
Итак, алгебраическим
11
9
=
,−
.
25 125
Для сумм точек вида C = A ⊕ A ⊕ A
!"⊕ · · · ⊕ A# используется обоn раз
значение C = n A.
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
405
Для n < 0 точка n A определяется как противоположный элемент к
(−n) A.
Умножение на нуль дает в результате бесконечно удаленную точку
O.
Таким образом, точка n A, являющаяся суммой n точек A, определена
для всех целых n в соответствии со следующим правилом:
⎧
⎪
⎪
!"⊕ · · · ⊕ A#, если n > 0,
⎪A ⊕ A ⊕ A
⎨
n раз
(12.24)
nA =
O,
если n = 0,
⎪
⎪
⎪
⎩ −|n|A,
если n < 0.
Пример 12.4. Вычислите сумму четырех точек 4(5, 11) на эллиптической кривой, определенной уравнением y 2 = x3 − 2x + 6.
Решение.
Проверим, что точка (5, 11) принадлежит эллиптической кривой:
112 = 53 − 2 · 5 + 6, или 121 = 121, — верно.
(12.25)
Воспользуемся равенством
4(5, 11) = (5, 11) + (5, 11) + (5, 11) + (5, 11) = 2(5, 11) + 2(5, 11). (12.26)
По формулам удвоения (12.12) получаем:
κ=
73
,
22
2(5, 11) = (489/484, 23835/10648).
(12.27)
Применяя формулу удвоения повторно и используя для вычислений
программу на Python, приходим к окончательному ответу:
4(5, 11) = (− 2 160 508 643 999/1 099 855 587 600,
− 1 767 794 172 358 992 751/1 153 462 548 939 624 000). (12.28)
Как видно из рассмотренного примера, арифметические операции
над точками эллиптических кривых во многих случаях очень трудоемки
и результат практически невозможно получить без применения вычислительных систем.
Теорема 12.2. Операция сложения точек, определенная на эллиптической кривой Γ над множеством R2 ∪ {O}, обладает следующими
свойствами:
1. A ⊕ O = O ⊕ A = A ∀A ∈ Γ;
406
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
2. A ⊕ (−A) = O ∀A ∈ Γ;
3. A ⊕ B = B ⊕ A ∀A, B ∈ Γ;
4. (A ⊕ B) ⊕ C = A ⊕ (B ⊕ C) ∀A, B, C ∈ Γ.
Результат операции «⊕» принадлежит тому же множеству R2 ∪
∪{O}.
Другими словами, операция «⊕» является коммутативной и ассоциативной. Роль обратного элемента к A выполняет −A, роль нуля (нейтрального элемента) выполняет точка O = ∞.
12.2.
Эллиптические кривые
с рациональными точками
В предыдущих разделах данной главы в качестве универсального
множества рассматривалась декартова плоскость, дополненная бесконечно удаленной точкой ∞:
U = R2 ∪ {O}.
(12.29)
Напомним, что универсальное множество по определению содержит весь
набор значений, которые могут принимать переменные в конкретной задаче [62]. Для криптографии и теории чисел более значимыми являются
свойства эллиптических кривых над множеством точек с рациональными координатами Q2 ∪ {∞}, где Q = {p/q : p, q ∈ Z, q = 0} — множество
рациональных чисел. Как и в случае стандартной декартовой плоскости,
вводится дополнительная точка ∞, она считается рациональной.
Итак, зафиксируем в качестве универсального множества
U = Q2 ∪ {∞}.
(12.30)
Операция сложения точек определяется по тому же самому правилу,
что и в предыдущем разделе. Сформулируем это правило в виде алгоритма.
Алгоритм сложения точек на эллиптической кривой.
Сумма двух точек A(xA , yA ) и B(xB , yB ) на эллиптической кривой
Ξ = {(x, y) ∈ Q2 : y 2 = x3 + ax + b} ∪ {O}
(12.31)
есть точка C(xC , yC ), координаты которой находят по следующему
правилу.
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
407
1. Если A = O, то C = A ⊕ B = B.
2. Если B = O, то C = A ⊕ B = A.
3. Если xA = xB и yA = −yB , то C = A ⊕ B = O.
4. В других случаях вычисляют параметр κ:
⎧y − y
B
A
⎪
⎪
⎨ xB − xA , если A = B,
κ=
⎪
3x2 + a
⎪
⎩ A
, если A = B,
2yA
(12.32)
и координаты точки C будут равны
xC = κ 2 − xA − xB ,
yC = κ(xA − xC ) − yA .
(12.33)
(12.34)
Процедура сложения точек здесь определена корректно, поскольку
она не выводит результат за пределы расширенного множества рациональных точек. В самом деле, все обычные арифметические операции —
сложение, вычитание, умножение и деление — выполняются в алгоритме
над рациональными операндами, что в итоге приводит к рациональным
числам. Деление на нуль в алгоритме произойти не может в силу предварительной обработки исключительного случая B = −A. Следовательно,
имеет место теорема, аналогичная теореме 12.2.
Теорема 12.3. Операция сложения точек, определенная на эллиптической кривой Ξ над множеством Q2 ∪ {O}, обладает следующими
свойствами:
1. A ⊕ O = O ⊕ A = A ∀A ∈ Ξ;
2. A ⊕ (−A) = O ∀A ∈ Ξ;
3. A ⊕ B = B ⊕ A ∀A, B ∈ Ξ;
4. (A ⊕ B) ⊕ C = A ⊕ (B ⊕ C) ∀A, B, C ∈ Ξ.
Результат операции «⊕» принадлежит тому же расширенному множеству точек с рациональными координатами.
Как можно видеть, сложение рациональных точек на произвольной
эллиптической кривой обладает всеми свойствами обычной операции сложения рациональных чисел.
408
12.3.
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
Реализация алгоритма сложения
Рассмотрим программную реализацию алгоритма сложения рациональных точек эллиптической кривой. Входными данными для программы являются координаты точек A и B, в результирующий файл выводятся координаты суммы A ⊕ B над множеством Q2 ∪ {O}.
Листинг 12.1
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
class RationalFraction ( object ):
def __init__ ( self , n , d ):
self . n = n
self . d = d
def __eq__ ( self , other ):
return self . n == other . n and \
self . d == other . d
def __neg__ ( self ):
return RationalFraction ( - self .n , self . d )
class RationalPoint ( object ):
def __init__ ( self , x , y ):
self . x = x
self . y = y
def __eq__ ( self , other ):
return self . x == other . x and \
self . y == other . y
# Denominators of coordinates of the point
# at infinity are equated to zero
O = RationalPoint ( RationalFraction (1 , 0) , \
RationalFraction (1 , 0))
# Parameter a of an elliptic curve
a = RationalFraction ( -4 , 1)
def add ( p1 , p2 ):
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
409
if p1 . x . d == 0 or p1 . y . d == 0:
return p2
elif p2 . x . d == 0 or p2 . y . d == 0:
return p1
elif p1 . x == p2 . x and p1 . y == ( - p2 . y ):
return O
else :
k = RationalFraction (0 , 0)
c = RationalPoint ( RationalFraction (0 ,0) ,\
RationalFraction (0 ,0))
if p1 == p2 :
k . n = p1 . y . d * \
(3 * p1 . x . n * p1 . x . n * a . d + \
a . n * p1 . x . d * p1 . x . d )
k . d = 2 * p1 . y . n * p1 . x . d * \
p1 . x . d * a . d
if k . d < 0:
k . n = -k . n
k . d = -k . d
c.x.n = \
( k . n * k . n * p1 . x . d * p2 . x . d - \
p1 . x . n * k . d * k . d * p2 . x . d - \
p2 . x . n * k . d * k . d * p1 . x . d )
c . x . d = k . d * k . d * p1 . x . d * p2 . x . d
c.y.n = \
k . n * p1 . y . d * \
( p1 . x . n * c . x . d - c . x . n * p1 . x . d ) - \
k . d * p1 . x . d * c . x . d * p1 . y . n
c . y . d = k . d * p1 . x . d * c . x . d * p1 . y . d
fraction_reduce ( c . x )
fraction_reduce ( c . y )
if c . x . d < 0:
c . x . n = -c . x . n
c . x . d = -c . x . d
410
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
75
if c . y . d < 0:
76
c . y . n = -c . y . n
77
c . y . d = -c . y . d
78
79
else :
80
# Points are different
81
k . n = p1 . x . d * p2 . x . d * \
82
( p2 . y . n * p1 . y . d - p1 . y . n * p2 . y . d )
83
k . d = p1 . y . d * p2 . y . d * \
84
( p2 . x . n * p1 . x . d - p1 . x . n * p2 . x . d )
85
86
if k . d < 0:
87
k . n = -k . n
88
k . d = -k . d
89
90
c.x.n = \
91
( k . n * k . n * p1 . x . d * p2 . x . d - \
92
p1 . x . n * k . d * k . d * p2 . x . d - \
93
p2 . x . n * k . d * k . d * p1 . x . d )
94
c . x . d = k . d * k . d * p1 . x . d * p2 . x . d
95
96
c . y . n = k . n * p1 . y . d * \
97
( p1 . x . n * c . x . d - c . x . n * p1 . x . d ) - \
98
k . d * p1 . x . d * c . x . d * p1 . y . n
99
c . y . d = k . d * p1 . x . d * c . x . d * p1 . y . d
100
101
fraction_reduce ( c . x )
102
fraction_reduce ( c . y )
103
104
if c . x . d < 0:
105
c . x . n = -c . x . n
106
c . x . d = -c . x . d
107
108
if c . y . d < 0:
109
c . y . n = -c . y . n
110
c . y . d = -c . y . d
111
112
return c
113
114
115 def gcd (a , b ):
Powered by TCPDF (www.tcpdf.org)
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
411
r = 0
# Euclid ’s algorithm
while b != 0:
r = a % b
a = b
b = r
return a
def fraction_reduce ( fraction ):
temp = gcd ( fraction .n , fraction . d )
fraction . n //= temp
fraction . d //= temp
p1 = RationalPoint ( RationalFraction (0 ,
RationalFraction (0 ,
p2 = RationalPoint ( RationalFraction (0 ,
RationalFraction (0 ,
0) , \
0))
0) , \
0))
with open ( ’ input . txt ’) as file :
p1 . x .n , p1 . x .d , p1 . y .n , p1 . y . d = \
[ int ( num ) for num in next ( file ). split ()]
p2 . x .n , p2 . x .d , p2 . y .n , p2 . y . d = \
[ int ( num ) for num in next ( file ). split ()]
result = add ( p1 , p2 )
with open ( ’ output . txt ’ , ’w + ’) as file :
output = ’ (% d / %d , % d / % d ) ’ % \
( result . x .n , result . x .d , \
result . y .n , result . y . d )
file . write ( output )
Для работы с рациональными дробями в программе реализован класс
RationalFraction, состоящий из двух полей — числителя и знаменателя
412
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
дроби.
Произвольная рациональная точка плоскости характеризуется своими абсциссой и ординатой. Каждая из этих координат представляет
собой рациональную дробь, поэтому в описании класса RationalPoint
присутствуют два поля, хранящие объекты RationalFraction.
Таким образом, рациональная точка эллиптической кривой в программе представлена классом, содержащим в своем составе объекты других классов.
Например, точка P1 (3, −2) декартовой плоскости может быть запи&3 2'
сана в виде
,−
= RationalPoint(RationalFraction(3, 1), и в
1 1
памяти компьютера представлена как
p1 = {{3, 1}, {−2, 1}}.
Обращение к полям выполняется следующим образом:
• p1.x.n — числитель абсциссы точки P1 ;
• p1.x.d — знаменатель абсциссы точки P1 ;
• p1.y.n — числитель ординаты точки P1 ;
• p1.y.d — знаменатель ординаты точки P1 .
Знаком дроби будем считать знак ее числителя, сохраняя в промежуточных вычислениях знак знаменателя положительным.
Отдельно следует обсудить вопрос о представлении бесконечно удаленной точки O. В данной реализации она вводится как объект
O = RationalPoint(RationalFraction(1, 0),
RationalFraction(1, 0))
т. е. знаменатели ее координат приравнены к нулю.
Основная процедура, выполняющая сложение точек, носит название
add() и работает следующим образом. В ее коде непосредственно отражен алгоритм, представленный на с. 406, причем арифметические операции над рациональными дробями выполняются по отдельности для
числителя и знаменателя.
В частности, сложение двух дробей представлено в виде:
p1.x.n p2.x.n p1.x.n*p2.x.d + p2.x.n*p1.x.d
+
=
.
p1.x.d p2.x.d
p1.x.d*p2.x.d
(12.35)
Аналогичным образом в программе реализованы вычитание, умножение и деление. После вычисления такого рода арифметических операций
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
413
в результате может получиться сократимая дробь. Например, суммиро2 1
вание + выполняется таким образом:
3 3
2 1 2·3+1·3 9
+ =
= .
3 3
3·3
9
(12.36)
В связи с этим перед возвращением результата функция add() осуществляет деление числителя и знаменателя дроби на их наибольший
общий делитель (greatest common divisor, gcd). Для этого производится
вызов вспомогательной функции fraction_reduce().
Вычисление наибольшего общего делителя двух целых чисел основано на широко известном классическом алгоритме Евклида3 [54].
На заключительном этапе работы программа выводит сумму двух
рациональных точек в виде
( c.x.n / c.x.d, c.y.n / c.y.d )
где c.x.n — числитель абсциссы результата, c.x.d — знаменатель абсциссы результата и т. д.
Контрольные вопросы к главе
«Эллиптические кривые»
1. Дайте определение эллиптической кривой.
2. Как вычислить дискриминант уравнения эллиптической кривой?
3. Объясните, как по знаку дискриминанта эллиптической кривой
установить количество компонент связности ее графика.
4. Перечислите свойства бесконечно удаленной точки O.
5. Расскажите, как вычислить сумму точек A ⊕ B на эллиптической
кривой.
6. Как, зная координаты некоторой точки на эллиптической кривой,
найти координаты противоположной точки?
7. Сформулируйте необходимое и достаточное условие равенства O
суммы трех точек на эллиптической кривой.
8. Дайте определение суммы n точек на эллиптической кривой, где
n — целое число.
3
Евклид (Εὐκλείδης) (ок. 325 г. до н. э. — до 265 г. до н. э.) — древнегреческий математик.
414
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
9. Перечислите свойства операции сложения точек на эллиптической
кривой.
Задачи для самостоятельного решения
12.1. Какие из перечисленных ниже уравнений задают эллиптические
кривые на расширенной декартовой плоскости R2 ∪ {O}?
1) y 2 = x2 − x + 1;
2) y 2 = x3 + x + 1;
3) y 2 = x + 1;
4) y 2 = x3 ;
5) y 2 = x3 + 3x + 2;
6) y 2 = x3 − 3x + 2;
7) y 2 = x3 − 15x/27;
8) y 2 = x4 + x3 .
Если кривая относится к классу эллиптических, то вычислите ее
дискриминант и постройте график.
12.2. Изобразите график кривой S = {(x, y) : y 2 = x3 − 12x + 16} и
поясните, почему она не относится к классу эллиптических.
12.3. Вычислите дискриминант для каждой из следующих эллиптических кривых:
1) y 2 = x3 − 2x + 3;
2) y 2 = x3 − x − 1;
3) y 2 = x3 + 4x;
4) y 2 = x3 − 10x + 8.
Сколько компонент связности содержит график каждой из них?
∗ 12.4. Докажите, что формулу удвоения для вычисления абсциссы точки 2A на кривой y 2 = x3 + ax + b можно представить в следующем
виде:
x2A =
3x2A + a
2yA
2
− 2xA =
x4A − 2ax2A − 8bxA + a2
.
4x3A + 4axA + 4b
(12.37)
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
415
12.5. Проверьте, что точки (−2, 5), (−1, −5) и (103, 1045) принадлежат
эллиптической кривой y 2 = x3 − 7x + 19.
12.6. Проверьте, что на кривой y 2 = x3 + 15 выполняется равенство
2(1, 4) = (−119/64, −1499/512).
12.7. Вычислите следующие суммы точек на эллиптических кривых над
множеством Q2 :
1) (−3, 3) ⊕ (1, 3) на кривой y 2 = x3 − 7x + 15;
2) (1, 4) ⊕ (1, 4) на кривой y 2 = x3 + x + 14.
12.8. Проверьте выполнение равенств на эллиптической кривой y 2 = x3 −
−7x + 10:
1) (5, 10) ⊕ (9, 26) = (2, 2);
2) (5, 10) ⊕ (2, −2) = (9, −26);
3) (5, 10) ⊕ (2, 2) = (1/9, 82/27);
4) (5, −10) ⊕ (1, −2) = (−2, −4).
12.9. Вычислите сумму точек
(−2, −4) ⊕ (1, 2) ⊕ (2, 2) ⊕ (−3, 2)
на кривой y 2 = x3 − 7x + 10.
12.10. Проведите удвоение точки (5, 12) на кривой y 2 = x3 + x + 14.
12.11. Вычислите сумму точек
1) 2(7, 19) на кривой y 2 = x3 + x + 11;
2) 3(1, 4) на кривой y 2 = x3 + x + 14.
∗ 12.12. Вычислите сумму точек
2(2, 4) ⊕ 2(33, 190) ⊕ (1, 2)
на кривой y 2 = x3 + 5x − 2.
∗ 12.13. Вычислите сумму точек
(6, 16) ⊕ (−1, −2) ⊕ (−2)(9, −28)
на кривой y 2 = x3 + 5x + 10.
12.14. Напишите функцию, проверяющую принадлежность рациональной
точки P (x, y) эллиптической кривой y 2 = x3 + ax + b.
416
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
Ответы и решения к главе «Эллиптические
кривые»
12.1. Решение.
Эллиптическая кривая, как известно, определяется соотношением
y 2 = x3 + ax + b
для некоторых a, b ∈ R при условии 4a3 + 27b2 = 0 (см. с. 396). Опираясь
на данное определение, получаем:
1) y 2 = x2 − x + 1 не является эллиптической кривой, поскольку в
правой части отсутствует слагаемое x3 ;
2) y 2 = x3 + x + 1 является эллиптической кривой, соответствующие
значения параметров равны a = 1, b = 1, дискриминант Δ = −16(4a3 +
+27b2 ) = −496;
3) y 2 = x + 1 не является эллиптической кривой, т. к. отсутствует
кубическое слагаемое x3 ;
4) y 2 = x3 не является эллиптической кривой, т. к. a = 0, b = 0 и
выполняется равенство 4a3 + 27b2 = 0;
5) y 2 = x3 + 3x + 2 удовлетворяет определению эллиптической кривой
с параметрами a = 3 и b = 2, дискриминант Δ = −3456;
6) y 2 = x3 − 3x + 2 не является эллиптической кривой, поскольку
a = −3, b = 2 и 4a3 + 27b2 = 0;
7) y 2 = x3 −5x/27 удовлетворяет определению эллиптической кривой,
a = −5/27 и b = 0, Δ = 8000/19683;
8) в уравнении y 2 = x4 +x3 присутствует слагаемое четвертой степени
x4 , следовательно, соответствующая кривая не принадлежит к классу
эллиптических.
12.2. Решение.
График кривой S представлен на рис. 12.6. Кривая S не является эллиптической, т. к. не выполняется условие отличия от нуля ее дискриминанта: Δ = −16(4a3 +27b2 ) = −16(4(−12)3 +27·162 ) = 0. Геометрическое
отражение этого факта — наличие на графике точки самопересечения c
координатами (−2, 0).
12.3. Решение.
Используя формулу Δ = −16(4a3 + 27b2 ), получаем:
1) Δ = −3376, график кривой имеет одну компоненты связности;
2) Δ = −368, одна компонента связности;
3) Δ = −4096, одна компонента связности;
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
y
a)
417
y
b)
x
x
y 2 = x3 + x + 1
y 2 = x3 + 3x + 2
y
c)
x
y 2 = x3 − 15x/27
Рис. 12.5. Эллиптические кривые к упр. 12.1. Прямоугольная сетка на
панелях a)–c) выполнена
с шагом, равным 2
4) Δ = 36352, график состоит из двух компонент связности.
12.4. Решение.
Раскрывая скобки в выражении
3x2A + a
2yA
2
− 2xA и приводя подоб-
418
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
y
x
y 2 = x3 − 12x + 16
Рис. 12.6. Кривая S к упр. 12.2. Прямоугольная сетка выполнена с шагом, равным 2. Точка (2, 0) является точкой самопересечения для кривой
y 2 = x3 − 12x + 16
ные слагаемые, приходим к формуле для x2A :
x2A =
=
=
=
2
9x4A + 6ax2A + a2
− 2xA =
4yA2
9x4A + 6ax2A + a2 − 8xA yA2
=
4yA2
9x4A + 6ax2A + a2 − 8xA (x3A + axA + b)
=
4(x3A + axA + b)2
x4A − 2ax2A − 8bxA + a2
.
4x3A + 4axA + 4b
В алгебраических преобразованиях было использовано равенство yA2 =
= x3A + axA + b, справедливое для координат всех точек эллиптической
кривой.
Таким образом, альтернативный вариант формулы удвоения доказан.
12.5. Решение.
Подставим координаты каждой из точек в уравнение кривой y 2 =
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
419
= x3 − 7x + 19:
52 = (−2)3 − 7(−2) + 19, или 25 = 25;
(−5)2 = (−1)3 − 7(−1) + 19, или 25 = 25;
10452 = 1033 − 7(103) + 19, или 1 092 025 = 1 092 025.
Во всех трех случаях получены верные равенства, поэтому рассмотренные точки действительно принадлежат эллиптической кривой y 2 =
= x3 − 7x + 19.
12.6. Решение.
Воспользуемся формулой удвоения (12.12). Подставим в нее числовые
значения из условия задачи a = 0, b = 15, xA = 1 и yA = 4. Тогда
получим:
⎧
2
2
3
3 · 12 + 0
119
⎪
⎪
⎨x2A =
−2·1=
−2=−
,
2 · 4
64
8
3
119
1499
⎪
⎪
⎩y2A = −4 +
1− −
=−
.
8
64
512
Следовательно, равенство 2(1, 4) = (−119/64, −1499/512) действительно
выполняется на кривой y 2 = x3 + 15.
12.7. Ответ:
1) (2, −3);
2) (−7/4, −21/8).
12.9. Ответ: (−2, −4).
12.10. Ответ: (1/36, 809/216).
12.11. Ответ:
1) (422/361, 25449/6859);
2) (793/121, −23132/1331).
12.12. Ответ: (33, 190).
12.13. Ответ: O.
12.14. Решение.
Будем предполагать, что рациональная точка P (x, y) представляется в памяти вычислительной системы как объект класса RationalPoint,
описание которого приведено в Листинге 12.1 (строки 14–21 программного кода).
420
ГЛАВА 12. ЭЛЛИПТИЧЕСКИЕ КРИВЫЕ
Приведем реализацию функции is_point(), возвращающей значение
True или False в зависимости от принадлежности точки P (x, y) эллиптической кривой y 2 = x3 + ax + b.
def is_point(p):
# Point at infinity
if p.x.d == 0 and p.y.d == 0:
return True
elif p.x.d == 0 or p.y.d == 0:
raise ValueError("Zero denomitator of a coordinate")
# Checking the condition y * y = x * x * x + a * x + b
temp1 = a.d * b.d * p.x.n * p.x.n * p.x.n + \
a.n * b.d * p.x.n * p.x.d * p.x.d + \
a.d * b.n * p.x.d * p.x.d * p.x.d
temp2 = a.d * b.d * p.x.d * p.x.d * p.x.d
temp3 = temp2 * p.y.n * p.y.n - temp1 * p.y.d * p.y.d
return temp3 == 0
Приложение A
Основные операторы
в Python и C
Для записи алгоритмов в этой книге используется язык Python [73,
77]. Разумеется, при необходимости все представленные в тексте алгоритмы можно переписать с использованием любого другого языка программирования. В настоящем приложении приводится таблица соответствий между основными конструкциями Python версии 3 и их аналогами
в языке C (см. табл. A.1).
Оба этих языка относятся к языкам программирования высокого уровня, хотя уровень абстракций в Python считается более высоким по сравнению с языком C [65]. Это влечет, как правило, меньшую скорость работы программы на Python.
Одно из важных отличий синтаксиса этих двух языков заключается
в том, что команды в языке C заканчиваются точкой с запятой, а в
Python точку с запятой в конце команды ставить не обязательно. Другое
существенное отличие связано с выделением блока операторов: в C для
этого используются фигурные скобки, в Python — отступ, состоящий
ровно из четырех пробелов.
Создание нового класса в Python можно осуществить следующим образом:
class Point:
def __init__(self, x, y):
self.x = x
self.y = y
Такой класс был использован в главе 7 для описания точки декартовой плоскости. Данный класс содержит поля x и y, представляющие координаты точки. Также в этом классе присутствует конструктор класса,
который вызывается при создании объекта и служит для инициализации его полей. Для обращения к полям можно использовать ключевое
422
ПРИЛОЖЕНИЕ А
self, которое представляет текущий экземпляр класса, автоматически
передаваемый как аргумент в каждый метод этого класса.
Язык С, в отличие от Python, не является объектно-ориентированным,
и вместо классов в C используются структуры [7, 60].
Т а б л и ц а A.1
Соответствия между основными операторами Python и C
Команда или
операция
Python
C
присваивание x = y
x = y;
переменные
целого типа
int m = 10, n = -17;
m, n = 10, -17
переменные v = 0.005
вещественно- w = -1.4
го типа
float v = 0.005;
double w = -1.4;
переменные
логического
типа
u = True
v = False
u = 1;
v = 0;
строковые
переменные
s = "Текст строки"
const char* s = "Текст
строки";
массивы
arr = [1, 2, 3]
int arr[3] = {1, 2, 3};
arr[2] = 7
arr[2] = 7;
сравнение пе- x == y
ременных
x != y
x == y;
x != y;
логические
операции
(!A) && (B || C);
(not A) and (B or C)
арифметиm/n
ческое деление
(double)m/n
целочисленное деление
m/n
m//n
комментарии # комментарий
// комментарий
""" Текст многострочного /* Текст многострочного
комментария """
комментария */
ПРИЛОЖЕНИЕ А
423
Продолжение табл. A.1
условный
оператор
if a == b:
# Код1
elif a == c:
# Код2
else:
# Код3
if (a == b) {
// Код1
}
else if (a == c) {
// Код2
}
else {
// Код3
}
трехместный maxv = a if a>=b else b maxv = (a>=b) ? a : b;
оператор
цикл for
for i in range(n):
# Код
for(int i=0; i<n; i++) {
# Код
}
цикл while
while a == b:
# Код
while (a == b) {
// Код
}
функции
def sm(a, b):
s = a + b
return s
int sm(int a, int b) {
int s = a + b;
return s;
}
обмен значе- a, b = b, a
ний двух переменных
int c = a;
a = b;
b = c;
Перечислим еще несколько особенностей Python, нашедших отражение в листингах программ.
В Python существует способ генерации списков (в том числе многомерных):
• создание списка из n чисел, заполненного значениями
от 0 до n - 1:
V = [ i for i in range(n) ]
• создание двумерного списка (матрицы), заполненного нулями:
A = [[ 0 for j in range(n) ] \
for i in range(n) ]
424
ПРИЛОЖЕНИЕ А
По аналогии со многими другими языками Python предоставляет
средства для работы с исключениями, которые полезны для обработки
ошибочных ситуаций. Так, для того чтобы сгенерировать исключение,
используется ключевое слово raise:
raise Exception("Exception message")
Для того чтобы обработать исключение, используется конструкция
try-except:
try:
a = 5
b = 0
c = a / b
except ZeroDivisionError as e:
print(e)
После выполнения этого участка кода в консоль будет выведено сообщение:
division by zero
Приложение B
Тригонометрические формулы
В формулах данного приложения, если не оговорено иное, a, b ∈ R,
k, k ∈ Z.
(B.1)
sin2 a + cos2 a = 1;
π
sin a
, a = + πk;
cos a
2
cos a
ctg a =
, a = πk;
sin a
π
1
1 + tg2 a =
, a = + πk;
2
cos a
2
1
1 + ctg2 a =
, a = πk;
sin2 a
tg a =
sin 2a = 2 sin a cos a,
cos 2a = cos2 a − sin2 a;
π πk
π
2 tg a
, a = +
, a = + πk ;
tg 2a =
2
1 − tg a
4
2
2
a
a 1 + cos a
−
cos
a
1
sin2 =
,
cos2 =
;
2
2
2
2
sin(a + b) = sin a cos b + cos a sin b;
sin(a − b) = sin a cos b − cos a sin b;
cos(a + b) = cos a cos b − sin a sin b;
cos(a − b) = cos a cos b + sin a sin b;
(B.2)
(B.3)
(B.4)
(B.5)
(B.6)
(B.7)
(B.8)
(B.9)
(B.10)
(B.11)
(B.12)
426
ПРИЛОЖЕНИЕ B
tg a + tg b
, a, b, a + b =
1 − tg a tg b
tg a − tg b
tg(a − b) =
, a, b, a − b =
1 + tg a tg b
tg(a + b) =
&a + b'
π
+ πk;
2
π
+ πk;
2
&a − b'
;
2
2
&a − b'
&a + b'
sin
;
sin a − sin b = 2 cos
2
2
&a − b'
&a + b'
cos
;
cos a + cos b = 2 cos
2
2
&a − b'
&a + b'
sin
;
cos a − cos b = −2 sin
2
2
sin a + sin b =
2 sin
sin(a ± b)
,
cos a cos b
sin(b ± a)
ctg a ± ctg b =
,
sin a sin b
tg a ± tg b =
cos
a, b =
π
+ πk;
2
a, b = πk;
1
(cos(a − b) − cos(a + b));
2
1
cos a cos b = (cos(a − b) + cos(a + b));
2
1
sin a cos b = (sin(a − b) + sin(a + b)).
2
sin a sin b =
(B.13)
(B.14)
(B.15)
(B.16)
(B.17)
(B.18)
(B.19)
(B.20)
(B.21)
(B.22)
(B.23)
Приложение C
Греческий алфавит
A, α
B, β
Γ, γ
Δ, δ
E, ε
Z, ζ
H, η
Θ, θ
I, ι
K, κ
Λ, λ
M, μ
альфа
бета
гамма
дельта
эпсилон
дзета
эта
тета
йота
каппа
лямбда
мю
N, ν
Ξ, ξ
O, o
Π, π
P, ρ
Σ, σ
T, τ
Υ, υ
Φ, ϕ
X, χ
Ψ, ψ
Ω, ω
ню
кси
омикрон
пи
ро
сигма
тау
ипсилон
фи
хи
пси
омега
Список литературы
1. Андерсон, Д. Дискретная математика и комбинаторика / Дж. Андерсон. — Москва ; Санкт-Петербург ; Киев : Вильямс, 2004. — 960 с.
2. Берестецкий, В. Б. Теоретическая физикa / В. Б. Берестецкий,
Е. М. Лифшиц, Л. П. Питаевский. — 4-е изд. — Москва : ФИЗМАТЛИТ, 2006. — Т. IV. Квантовая электродинамика. — 720 с.
3. Введение в параллельные вычисления : Основы программирования
на языке Си с использованием интерфейса MPI / А. М. Сальников
[и др.]. — Москва : ИПУ РАН, 2009. — 123 с.
4. Воробьев, Н. Н. Числа Фибоначчи / Н. Н. Воробьев. — 4-е изд. —
Москва : Наука. Главная редакция физико-математической литературы, 1978. — 960 с. — (Популярные лекции по математике ; вып. 6).
5. Гантмахер, Ф. Р. Теория матриц / Ф. Р. Гантмахер. — 5-е изд. —
Москва : ФИЗМАТЛИТ, 2010. — 560 с.
6. Грэхем, Р. Конкретная математика : Математические основания информатики / Р. Грэхем, Д. Кнут, О. Паташник. — 2-е изд. — Москва :
Вильямс, 2015. — 784 с.
7. Дейтел, П. C для программистов с введением в C11 / П. Дейтел,
Х. Дейтел. — Москва : ДМК Пресс, 2014. — 544 с.
8. Дубровин, Б. А. Современная геометрия: методы и приложения. Т. 1.
Геометрия поверхностей, групп преобразований и полей / Б. А. Дубровин, С. П. Новиков, А. Т. Фоменко. — 6-е изд. — URSS, 2013. —
366 с.
9. Запрягаев, С. А. Введение в квантовые информационные системы :
учебное пособие / С. А. Запрягаев. — Воронеж: Издательский дом
ВГУ, 2015. — 219 с. — (Учебник Воронежского государственного университета).
СПИСОК ЛИТЕРАТУРЫ
429
10. Ильин, В. А. Линейная алгебра : учебник для вузов / В. А. Ильин,
Э. Г. Позняк. — 6-е изд. — Москва : ФИЗМАТЛИТ, 2010. — 280 с. —
(Курс высшей математики и математической физики).
11. Кононович, Э. В. Общий курс астрономии / Э. В. Кононович,
М. В. Мороз. — 4-е изд. — Москва : URSS, 2011. — 542 с. — (Классический университетский учебник).
12. Кострикин, А. И. Введение в алгебру : в 3 ч. / А. И. Кострикин. — 2-е
изд. — Москва : Московский центр непрерывного математического
образования, 2012. — 272 с.
13. Крупский, В. Н. Теория алгоритмов : учебное пособие для студ. вузов / В. Н. Крупский, В. Е. Плиско. — Москва : Академия, 2009. —
208 с. — (Прикладная математика и информатика).
14. Курант, Р. Что такое математика? Элементарный очерк идей и методов / Р. Курант, Г. Роббинс. — 6-е изд. — Москва : Московский центр
непрерывного математического образования, 2013. — 568 с.
15. Курош, А. Г. Курс высшей алгебры / А. Г. Курош. — 18-е изд. —
Санкт-Петербург : Лань, 2011. — 432 с.
16. Ландау, Л. Д. Теоретическая физика / Л. Д. Ландау, Е. М. Лифшиц. — 5-е изд. изд. — Москва : ФИЗМАТЛИТ, 2002. — Т. III. Квантовая механика (нерелятивистская теория). — 808 с.
17. Ландау, Л. Д. Теоретическая физика / Л. Д. Ландау, Е. М. Лифшиц. — 8-е изд. — Москва : ФИЗМАТЛИТ, 2003. — Т. II. Теория поля. — 536 с.
18. Магнус, Я. Р. Матричное дифференциальное исчисление с приложениями к статистике и эконометрике / Я. Р. Магнус, Х. Нейдеккер. —
Москва : ФИЗМАТЛИТ, 2002. — 495 с.
19. Марков, А. А. Теория алгорифмов / А. А. Марков, Н. М. Нагорный. — Москва : Наука. Главная редакция физико-математической
литературы, 1984. — 432 с. — (Математическая логика и основания
математики).
20. Математическая энциклопедия / Под ред. И. М. Виноградова. —
Москва : Советская энциклопедия, 1979. — Т. 2. Д–Коо. — 1104 стлб.
430
СПИСОК ЛИТЕРАТУРЫ
21. Новиков, Ф. А. Дискретная математика : учебник для вузов : стандарт третьего поколения / Ф. А. Новиков. — 3-е изд. — СанктПетербург : Питер, 2011. — 384 с.
22. Оре, О. Теория графов / О. Оре. — 2-е изд. — Москва : Едиториал
УРСС, 2009. — 352 с.
23. Основы линейной алгебры / А. Г. Буховец, П. В. Москалев, М. В. Горелова, Е. А. Агапова; Под ред. проф. А. Г. Буховца. — Воронеж :
ВГАУ, 2015. — 137 с.
24. Свешников, А. Г. Теория функций комплексной переменной : учебник
для вузов / А. Г. Свешников, А. Н. Тихонов. — 6-е изд. — Москва :
ФИЗМАТЛИТ, 2010. — 336 с. — (Курс высшей математики и математической физики).
25. Соминский, И. С. Метод математической индукции / И. С. Соминский. — 7-е изд. — Москва : Наука, 1965. — 56 с. — (Популярные лекции по математике ; вып. 3).
26. Стин, Э. Квантовые вычисления / Э. Стин. — Ижевск : НИЦ «Регулярная и хаотическая динамика», 2000. — 112 с.
27. Сэджвик, Р. Программирование на языке Python: учебный курс /
Р. Сэджвик, К. Уэйн, Р. Дондеро. — Москва, Санкт-Петербург, Киев :
Диалектика, 2017. — 736 с.
28. Трахтенброт, Б. А. Алгоритмы и машинное решение задач /
Б. А. Трахтенброт. — Москва : Государственное издательство технико-теоретической литературы, 1957. — 98 с. — (Популярные лекции
по математике ; вып. 26).
29. Уилсон, Р. Введение в теорию графов / Р. Уилсон. — Москва : Мир,
1977. — 208 с. — (Современная математика. Вводные курсы).
30. Хаггарти, Р. Дискретная математика для программистов / Р. Хаггарти. — 2-е изд. — Москва : Техносфера, 2012. — 400 с.
31. Харари, Ф. Теория графов / Ф. Харари. — 4-е изд. — Москва : Едиториал УРСС, 2015. — 304 с.
32. Шилов, Г. Е. Математический анализ (конечномерные линейные пространства) / Г. Е. Шилов. — Москва : Наука, 1969. — 432 с.
СПИСОК ЛИТЕРАТУРЫ
431
33. Arfken, G. B. Mathematical methods for physicists / G. B. Arfken,
H. J. Weber, F. E. Harris. — Sixth edition. — Elsevier Academic Press,
2005. — 1200 p.
34. Banchoff, T. Linear Algebra Through Geometry / T. Banchoff,
J. Wermer. — Second edition. — New York: Springer-Verlag, 1993. —
308 p.
35. Bertsekas, D. P. Parallel and Distributed Computation: Numerical
Methods / D. P. Bertsekas, J. N. Tsitsiklis. — Athena Scientific, 2015. —
735 p. — (Optimization and Neural Computation ; Book 7).
36. Billig, Y. Quantum Computing for High School Students / Y. Billig. —
2018. — 134 p.
37. Bix, R. Conics and Cubics: A Concrete Introduction to Algebraic
Curves / R. Bix. — Second edition. — Springer, 2006. — 346 p. —
(Undergraduate Texts in Mathematics).
38. Borsuk, K. Multidimensional analytic geometry / K. Borsuk. —
Warszawa: PWN, 1969. — 443 p. — (Monografie Matematyczne ; T. 50).
39. Bretscher, O. Linear Algebra with Applications / O. Bretscher. — Fifth
edition. — Pearson, 2013. — XVI, 508 p.
40. Carroll, B. W. An Introduction to Modern Astrophysics / B. W. Carroll,
D. A. Ostlie. — Second edition. — Pearson Addison-Wesley, 2007. —
1278 p.
41. Cheney, E. W. Introduction to Approximation Theory / E. W. Cheney. —
Second edition. — AMS Chelsea Publishing, 2000. — X, 259 p.
42. Chivers, I. Introduction to Programming with Fortran / I. Chivers,
J. Sleightholme. — Fourth edition. — Springer, 2018. — XXXII, 956 p.
43. Cohen, H. Number Theory / H. Cohen. — New York: Springer, 2007. —
Vol. I: Tools and Diophantine Equations. — XXXII, 650 p.
44. Cohn, P. M. Algebra. Volume 1 / P. M. Cohn. — Second edition. —
Chichester, New York, Brisbane [et al.]: John Wiley & Sons, 1982. —
XV, 410 p.
45. Cover, T. M. Elements of Information Theory / T. M. Cover,
J. A. Thomas. — Second edition. — Wiley-Interscience, 2006. — XXIV,
748 p.
432
СПИСОК ЛИТЕРАТУРЫ
46. Coxeter, H. S. M. Introduction to Geometry / H. S. M. Coxeter. — Second
edition. — New York [et al.]: Jonh Wiley & Sons, 1969. — 469 p.
47. D’Alberto, P. Adaptive Strassen’s matrix multiplication / P. D’Alberto,
A. Nicolau // Proceedings of the 21st annual international conference
on Supercomputing, ICS’07, June 18–20, Seattle, Washinton. — ACM,
2007. — P. 284–292.
48. Diestel, R. Graph Theory / R. Diestel. — Fifth edition. — Springer,
2017. — XVIII, 428 p. — (Graduate Texts in Mathematics ; vol. 173).
49. Gamelin, T. W. Complex Analysis / T. W. Gamelin. — Springer, 2001. —
XVIII, 478 p. — (Undergraduate Texts in Mathematics).
50. Golub, G. H. Matrix Computations / G. H. Golub, Ch. F. Van Loan. —
Fourth edition. — XXI, 756 p. — Baltimore: Johns Hopkins University
Press, 2013.
51. Halmos, P. R. Finite-Dimensional Vector Spaces / P. R. Halmos. —
Springer, 2011. — VIII, 202 p. — (Undergraduate Texts in Mathematics).
52. Handbook of Discrete and Combinatorial Mathematics / Ed. by
K. H. Rosen. — Second edition. — CRC Press, 2018. — XXIV, 1590 p. —
(Discrete Mathematics and Its Applications).
53. Handbook of Elliptic and Hyperelliptic Curve Cryptography / H. Cohen,
G. Frey, R. Avanzi [et al.]. — Boca Raton, London, New York,
Singapore: Chapman & Hall/CRC, 2006. — (Discrete Mathematics and
Its Applications).
54. Hardy, G. H. An Introduction to the Theory of Numbers / G. H. Hardy,
E. M. Wright, A. Wiles. — Sixth edition. — 658 p. — London: Oxford
University Press, 2008.
55. Higham, N. J. Functions of Matrices: Theory and Computation /
N. J. Higham. — USA: Society for Industrial and Applied Mathematics,
2008. — XX, 425 p.
56. Hungerford, T. W. Algebra / T. W. Hungerford. — Springer, 2011. —
XXIII, 502 p. — (Graduate Texts in Mathematics ; vol. 73).
57. Introduction to Algorithms / T. H. Cormen, C. E. Leiserson, R. L. Rivest,
C. Stein. — Third edition. — Cambridge, Massachusetts; London,
England: The MIT Press, 2009. — XX, 1292 p.
СПИСОК ЛИТЕРАТУРЫ
433
58. Ito, K. Enciclopedic Dictionary of Mathematics / K. Ito. — Second
edition. — Massachusetts Institute of Technology: The MIT Press;
Mathematical Society of Japan, 1987. — 2148 p.
59. Jeffrey, A. Handbook of Mathematical Formulas and Integrals /
A. Jeffrey, H. Dai. — Fourth edition. — Academic Press, 2008. — XLV,
541 p.
60. Kernighan, B. W. The C Programming Language / B. W. Kernighan,
D. M. Ritchie. — Third edition. — Englewood Cliffs, New Jersey: Prentice
Hall, 1988. — XII, 272 p.
61. Knuth, D. E. The Art of Computer Programming / D. E. Knuth. — Third
edition. — Reading, Massachusetts [et al.]: Addison-Wesley, 1997. —
Vol. 1. Fundamental Algorithms. — XX, 650 p.
62. Kurgalin, S. The Discrete Math Workbook : A Companion Manual for
Practical Study / S. Kurgalin, S. Borzunov. — Springer, 2018. — XIII,
485 p. — (Texts in Computer Science).
63. Kurgalin, S. A Practical Approach to High-Performance Computing /
S. Kurgalin, S. Borzunov. — Springer, 2019. — XI, 206 p.
64. Langtangen, H. P. A Primer on Scientific Programming with Python /
H. P. Langtangen. — Fourth edition. — Springer, 2014. — XXXI, 865 p. —
(Texts in Computational Science and Engineering ; vol. 6).
65. Martelli, A. Python in a Nutshell / A. Martelli, A. Ravenscroft,
S. Holden. — Third edition. — Beijing, Boston, Farnham [et al.]: O’Reilly,
2017. — XIV, 730 p.
66. McConnell, J. J. Analysis of Algorithms: An Active Learning Approach /
J. J. McConnell. — Second edition. — Jones and Bartlett Publishers,
2008. — XVIII, 451 p.
67. Miller, R. Algorithms Sequential and Parallel: A Unified Approach /
R. Miller, L. Boxer. — Third edition. — Cengage Learning, 2013. — XXXI,
417 p.
68. Mirsky, L. An Introduction to Linear Algebra / L. Mirsky. — Oxford:
Clarendon Press, 1955. — XII, 433 p.
69. Nielsen, M. A. Quantum Computation and Quantum Information /
M. A. Nielsen, I. L. Chuang. — 10th anniversary edition. — Cambridge
University Press, 2010. — XXXII, 676 p.
434
СПИСОК ЛИТЕРАТУРЫ
70. Numerical Recipes : The Art of Scientific Computing / W. H. Press,
S. A. Teukolsky, W. T. Vetterling, B. P. Flannery. — Third edition. —
Cambridge University Press, 2007. — XXII, 1235 p.
71. Ortega, J. M. Introduction to Parallel and Vector Solution of Linear
Systems / J. M. Ortega. — Springer, 1988. — XI, 305 p. — (Frontiers in
Computer Science).
72. Perez, F. Ipython: A system for interactive scientific computing /
F. Perez, B. E. Granger // Computing in Science & Engineering. —
2007. — Vol. 9. — P. 21–29.
73. The
Python
Tutorial.
—
2019.
https://docs.python.org/3/tutorial/index.html.
—
URL:
74. Rosen, K. H. Discrete Mathematics and Its Applications / K. H. Rosen. —
Eighth edition. — New York: McGraw-Hill, 2019. — XXI, 942 p.
75. Sedgewick, R. Algorithms in C. Part 5. Graph Algorithms /
R. Sedgewick. — Third edition. — Boston ; San Francisco ; New York
[et al.]: Addison-Wesley, 2001. — XVIII, 482 p.
76. Shafarevich, I. R. Linear Algebra and Geometry / I. R. Shafarevich,
A. O. Remizov. — Third edition. — Berlin: Springer, 2013. — XXI, 526 p.
77. Welcome to Python.org. — 2019. — URL: https://www.python.org/.
78. Williams, C. P. Explorations in Quantum Computing / C. P. Williams. —
Second edition. — Springer, 2011. — XXII, 717 p. — (Texts in Computer
Science).
79. Wirth, N. Pascal and Its Successors / N. Wirth. — Berlin, Heidelberg:
Springer-Verlag, 2002. — XX, 616 p.
80. Zorich, V. A. Mathematical Analysis I / V. A. Zorich. — Second
edition. — Springer, 2015. — XX, 720 p. — (Universitext).
Указатель имен
Абель . . . . . . . . . . . . . . . . . . . . . . 193
Адамар . . . . . . . . . . . . . . . . . . . . . 202
аль-Хорезми . . . . . . . . . . . . . . . . . 28
Арган . . . . . . . . . . . . . . . . . . . . . . 188
Буняковский . . . . . . . . . . . . . . . 247
Вандермонд . . . . . . . . . . . . . . . . . 86
Виет . . . . . . . . . . . . . . . . . . . . . . . . 211
Гамильтон . . . . . . . . . . . . . . . . . . 244
Гаусс . . . . . . . . . . . . . . . . . . . . . . . 145
Гессе . . . . . . . . . . . . . . . . . . . . . . . 297
Гильберт . . . . . . . . . . . . . . . . . . . . 90
Грам . . . . . . . . . . . . . . . . . . . . . . . 239
Декарт . . . . . . . . . . . . . . . . . . . . . 270
Дирак . . . . . . . . . . . . . . . . . . . . . . 197
Евклид . . . . . . . . . . . . . . . . . . . . . 413
Жордан . . . . . . . . . . . . . . . . . . . . 165
Капелли . . . . . . . . . . . . . . . . . . . . 144
Кардано . . . . . . . . . . . . . . . . . . . . 192
Каталан . . . . . . . . . . . . . . . . . . . . . 48
Кеплер . . . . . . . . . . . . . . . . . . . . . 391
Коши . . . . . . . . . . . . . . . . . . . . . . . 247
Крамер . . . . . . . . . . . . . . . . . . . . . 141
Кронекер . . . . . . . . . . . . . . . . . . . . 20
Кэли . . . . . . . . . . . . . . . . . . . . . . . 244
Лагранж . . . . . . . . . . . . . . . . . . . 210
Лаплас, де . . . . . . . . . . . . . . . . . . . 65
Минковский . . . . . . . . . . . . . . . . 238
Муавр . . . . . . . . . . . . . . . . . . . . . . 191
Ньютон . . . . . . . . . . . . . . . . . . . . .218
Паули . . . . . . . . . . . . . . . . . . . . . . 199
Пифагор . . . . . . . . . . . . . . . . . . . 248
Рой . . . . . . . . . . . . . . . . . . . . . . . . . . 38
Руффини . . . . . . . . . . . . . . . . . . . 193
Руше . . . . . . . . . . . . . . . . . . . . . . . 144
Сильвестр . . . . . . . . . . . . . . . . . . 357
Уоршелл . . . . . . . . . . . . . . . . . . . . .35
Ферма, де . . . . . . . . . . . . . . . . . . 396
Феррари . . . . . . . . . . . . . . . . . . . . 192
Фибоначчи . . . . . . . . . . . . . . . . . . 86
Хоар . . . . . . . . . . . . . . . . . . . . . . . . . 29
Шварц . . . . . . . . . . . . . . . . . . . . . 247
Шмидт . . . . . . . . . . . . . . . . . . . . . 239
Штрассен . . . . . . . . . . . . . . . . . . . 27
Эйлер . . . . . . . . . . . . . . . . . . . . . . 190
Якоби . . . . . . . . . . . . . . . . . . . . . . . 26
Предметный указатель
Numbers
(0,1)-матрица см. матрица, двоичная
C
C, язык программирования 18, 32
F
Fortran, язык программирования 32
J
Java, язык программирования 32
N
n-вектор см. вектор
n-мерное пространство 233
NumPy 35
P
Pascal, язык программирования 32
Python, язык программирования 18,
28, 32, 87, 88, 90, 150
S
spur см. след матрицы
О
O-символика 31
А
абсцисса 270
алгебраическая форма комплексного
числа см. комплексное число, алгебраическая форма
алгебраическое дополнение 65, 69
алгоритм 28
— Грама – Шмидта см. ортогонализация Грама – Шмидта
— Евклида 413
— Роя – Уоршелла см. алгоритм Уоршелла
— Уоршелла 35, 38, 39
— — модифицированный 49
— Штрассена 27
— вычисления определителя 88
— свойства 28
— — детерминированность 29
— — дискретность 28
— — массовость 29
— — направленность 29
— — элементарность шагов 28
— сложения точек на эллиптической
кривой 406
алфавит
— греческий 427
— латинский 17
анализ алгоритмов 30
аннулирующий полином см. полином,
аннулирующий
аномалия эксцентриситета 374
антисимметричная матрица см. матрица, антисимметричная
антиэрмитова матрица см. матрица,
антиэрмитова
аппликата 271
аргумент комплексного числа 189
— главное значение 189
асимптотическая сложность 30, 152,
199
— метода Гаусса 152
асимптоты гиперболы 375
ассоциативность сложения 23
ассоциативность умножения 25
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
437
Б
Г
база индукции 71
базис 235
базис векторного пространства 235
базисный минор см. минор, базисный
базовая операция 30
бесконечно удаленная точка 397
беспорядок 65
билинейная форма 348
— положительно определенная 349
— полярная 351
— свойства линейности 348
— симметричная 349
биссектриса треугольника 305
бит 197
блочная матрица см. матрица, блочная
гейт 198, 202
— Адамара 202
гипербола 374
— равносторонняя 383
главная диагональ матрицы 19
главное значение аргумента см. аргумент комплексного числа, главное
значение
граф 35
— ориентированный 35, 38
В
вековое уравнение 244
вековые движения 244
вектор 17, 232, 269
— единичный 269
— направляющий 334
— нормальный 291
— нулевой 232, 269
— противоположный 233
векторное произведение 274
— свойства 274
векторное уравнение плоскости 320
великая теорема Ферма см. теорема,
Ферма великая
вентиль см. гейт
верхняя треугольная матрица см. матрица, верхняя треугольная
вершина
— гиперболы 375
— параболы 376
— эллипса 370
вершина графа 35, 38
ветвь гиперболы 374, 383
вещественная часть комплексного числа см. комплексное число, вещественная часть
внутреннее произведение см. скалярное произведение
высокопроизводительные вычисления
35
высота треугольника 305
Д
двоичная матрица см. матрица, двоичная
двойное векторное произведение 279
декартова система координат 189
диагонализация матриц 245
диагональная матрица см. матрица,
диагональная
диаграмма Аргана 188
диаграмма графа 36
дизъюнкция 38
директриса
— гиперболы 375
— параболы 376
— эллипса 371
дискриминант уравнения эллиптической кривой 396
дистрибутивность умножения относительно сложения 25
длина вектора 238
длина маршрута 37
доказательство корректности алгоритма 29
дополнительный минор элемента 65
Е
единичная матрица см. матрица, единичная
единичный вектор см. вектор, единичный
З
закон инерции 357
438
И
измерение состояния 198
инверсия перестановки 64, 84
инцидентные вершины 36
К
каноническая система координат см.
система координат, каноническая
каноническая форма уравнения третьей степени 193
канонический базис 154
канонический вид квадратичной формы 353
канонический вид уравнения кривой
второго порядка 370
каноническое уравнение прямой 334
касательная 372, 379
— к гиперболе 375
— к параболе 377
— к эллипсу 372
квадратичная форма 350
— вырожденная 351
— знакопеременная 357
— невырожденная 351
— отрицательно определенная 357
— положительно определенная 357
квадратичная часть уравнения кривой
второго порядка 370
квантовомеханический оператор 201
квантовые компьютеры 197
квантовые схемы 202
класс функций O(g(n)) 31
коллинеарность векторов 237
коллинеарные векторы 269
коммутативность сложения 22
коммутатор 25
коммутирующие матрицы 25
компланарные векторы 278, 324
комплексная плоскость 188
комплексное число 187
— алгебраическая форма 188
— вещественная часть 187
— мнимая часть 187
— показательная форма 190
— сопряженное 188
— тригонометрическая форма 189
— чисто мнимое 188
композиция операторов 201
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
компоненты вектора 232
концы отрезка 300
концы ребра 36
конъюнкция 38
координаты вектора 232
корень из единицы 191
корень из комплексного числа 191
корректность алгоритма 29, 39
косоэрмитова матрица см. матрица, антиэрмитова
коэффициенты линейной комбинации
79
коэффициенты системы уравнений 139
коэффициенты уравнения прямой 291
кривые второго порядка 370
— вырожденные 377
— невырожденные 377
криптография 396
критерий Сильвестра 357
критерий совместности системы линейных уравнений 144
кросс-диагональ см. побочная диагональ матрицы
кубит 197
Л
линейная комбинация векторов 233
линейная комбинация строк 79
линейная часть уравнения кривой второго порядка 370
линейно зависимая система векторов
233
линейно независимая система векторов
233
логарифм от матрицы 77
М
маршрут 37
— тривиальный 37
массив 32
— двумерный 32
матрица 17, 32, 62, 187
— Гильберта 90
— антисимметричная 21
— антиэрмитова 214
— билинейной формы 348
— блочная 200
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
— верхняя треугольная 20, 69
— вещественная 18, 187
— двоичная 21, 37
— диагональная 19
— достижимости 35, 38
— единичная 19, 68
— квадратичной формы 350, 357
— квадратная 18, 19, 68
— — вырожденная 69
— — диагональная 71
— — невырожденная 69
— — неособенная см. матрица, квадратная, невырожденная
— — особенная см. матрица, квадратная, вырожденная
— комплексная 18, 187, 195
— краткая запись 17
— нижняя треугольная 20, 69
— нулевая 19
— обратная 69, 142
— присоединенная 69
— прямоугольная 18
— самосопряженная см. матрица, эрмитова
— симметричная 20
— смежности 37
— ступенчатая 80, 94, 145
— транспонированная 19
— унитарная 196
— функциональная 28
— эрмитова 196
— эрмитово-сопряженная 195
матрица системы векторов 235
матрица системы линейных уравнений
140
— расширенная 140
матрицы
— Дирака 199, 200
— Паули 199, 200
матричная алгебра 21
матричный вид системы линейных
уравнений 140
медиана треугольника 304, 305
метод
— Гаусса 145, 146, 150
— Гаусса – Жордана 165
— Кардано 192
— Крамера 141
— Лагранжа 353
439
— Якоби 356
— математической индукции 39, 71
— обратной матрицы 142
— окаймляющих миноров 83
— последовательного исключения неизвестных см. метод Гаусса
— элементарных преобразований 80
минор 78, 87, 146
— базисный 79
мнимая единица 188
мнимая часть комплексного числа см.
комплексное число, мнимая часть
многочлен см. полином
модуль вектора 269
модуль комплексного числа 189
мощность множества 36
Н
направляющие косинусы 323
направляющий вектор см. вектор, направляющий
неполная гамма-функция 88
неравенство
— Коши – Буняковского 247
— Коши – Шварца см. неравенство Коши – Буняковского
— Минковского см. неравенство треугольника
— треугольника 208, 238
нижняя треугольная матрица см. матрица, нижняя треугольная
норма вектора 238
нормаль см. вектор, нормальный
нормальная форма Гессе см. нормальное уравнение прямой
нормальное уравнение плоскости 323
нормальное уравнение прямой 297
нормальный вектор см. вектор, нормальный
нормирующий множитель 298
нотация Дирака 197
нулевая матрица см. матрица, нулевая
нулевое уравнение 145
нулевой вектор см. вектор, нулевой
О
обозначения матриц 18
440
обратная матрица см. матрица, обратная
обратный ход метода Гаусса 152
общее решение неоднородной системы
158
общее решение однородной системы
158
общее уравнение плоскости 321
— неполное 321
— полное 321
общее уравнение прямой 291
окружность 370
опорный элемент 152
определитель 62, 64, 141
— n-го порядка 64
— Вандермонда 86
— аксиоматическое определение 68
— второго порядка 62
— первого порядка 64
— разложение по столбцу 66
— разложение по строке 66
— третьего порядка 62
определитель системы векторов 235
оптическое свойство
— гиперболы 375
— параболы 377
— эллипса 372
орграф см. граф, ориентированный
ордината 271
орт 235, 269, 271
ортогонализация Грама – Шмидта 239
ортогональность векторов 237, 238, 272
ортонормированность векторов 239
основная теорема алгебры см. теорема,
основная алгебры
отклонение точки от плоскости 325
отклонение точки от прямой 298
отношение эквивалентности 240
отрезок 300
П
параллелепипед 277
параметр отрезка 300
параметр параболы см. фокальный параметр параболы
параметр прямой 334
параметрический вид
— эллипса 373
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
параметрическое уравнение прямой
334
перестановка 64
— тождественная 64
перестановочные матрицы см. коммутирующие матрицы
плоскость 290, 322
побочная диагональ матрицы 19
подобные матрицы 239
показательная форма комплексного
числа см. комплексное число, показательная форма
полином 64, 192
— аннулирующий 244
— от матрицы 75
полуось
— гиперболы
— — вещественная 374
— — мнимая 374
— эллипса
— — большая 370
— — малая 370
полярная система координат 189
последовательность Фибоначчи 86, 92
постусловие 29
правило треугольника 63
предикат 29, 72
предусловие 29
преобразование подобия 240
принцип математической индукции см.
метод математической индукции
проекция вектора на прямую 270
проекция на |0 и |1 205
проекция точки на прямую 270
произведение комплексных чисел 187
произведение матриц 23, 34
произведение матрицы на число 22
произведение числа и вектора 232
пространство
— n-мерное 233, 235
— двумерное 233
— одномерное 233
— трехмерное 233
противоположная точка на эллиптической кривой 399
противоположный вектор см. вектор,
противоположный
прямой ход метода Гаусса 152
путь 37
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
пучок плоскостей 326
Р
равенство матриц 21
равные векторы 232, 269
радиус-вектор 188, 270
разложение Лапласа 66
разложение вектора по базису 271
разложением вектора по базису 236
разность векторов 232
разность матриц 22
ранг квадратичной формы 351, 357
ранг матрицы 79
расстояние между точками 273
расстояние от точки до плоскости 325
расширенная матрица системы линейных уравнений см. матрица системы
линейных уравнений, расширенная
ребро графа 35
решение системы линейных уравнений
139, 235
— тривиальное 153
ряд 76
С
самосопряженная матрица см. матрица, эрмитова
свободные переменные 154
свободные члены 139
свободный член 370
свойства определителей 66
свойство единичной матрицы 25
свойство нулевой матрицы 25
сигнатура квадратичной формы 357
символ Кронекера 20
система координат
— декартова 270, 290
— каноническая 370
система линейных уравнений 139
— квадратная 139
— неоднородная 139, 158
— неопределенная 139
— несовместная 139
— однородная 139, 153, 241
— определенная 139
— прямоугольная 139
— совместная 139
441
скаляр 17
скалярное произведение 237, 272
— свойства 237
скрещивающиеся прямые 339
след матрицы 27, 51
— единичной 27
смежные вершины 36
смежный угол 294
смешанное произведение 276
— свойства 277
собственное значение 240
собственный вектор 240
сопряженное комплексное число см.
комплексное число, сопряженное
состояния вычислительного базиса 198
список 32
столбец матрицы 17, 65
столбцы матрицы
— линейно зависимые 80
— линейно независимые 80
строка матрицы 17, 65
— рабочая 80
строки матрицы
— линейно зависимые 79
— линейно независимые 79
ступенчатая матрица см. матрица, ступенчатая
сумма векторов 232, 269
сумма комплексных чисел 187
сумма матриц 21, 33
Т
теорема
— Абеля – Руффини 193
— Кронекера – Капелли 144, 235
— Лапласа 65
— Пифагора 248
— Руше – Капелли см. теорема Кронекера – Капелли
— Ферма великая 396
— о базисном миноре 80
— о степени матрицы 75
— основная алгебры 192
теорема Кэли – Гамильтона 244
теория графов 35
теория чисел 397
тетраэдр 278, 328
тождества Лагранжа 210
442
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
тождества Эйлера 216
тождество Якоби
— для векторов 279
— для коммутаторов 26
транспонирование 33, 42, 66
транспонированная матрица см. матрица, транспонированная
тригонометрическая форма комплексного числа см. комплексное число,
тригонометрическая форма
тройка Хоара 29
условие параллельности плоскостей
325
условие параллельности прямой и
плоскости 338
условие пересечения прямых 339
условие перпендикулярности прямой и
плоскости 338
условие принадлежности прямой плоскости 338
условие принадлежности прямых одной плоскости 339
У
Ф
угловой коэффициент прямой 291
угловой минор см. минор, угловой
угол между плоскостями 325
угол между прямой и плоскостью 338
угол между прямыми 294, 336
удвоение точки 402
умножение матрицы на число 33
унитарная матрица см. матрица, унитарная
управляемый NOT 206
управляемый фазовый элемент 206
уравнение кривой второго порядка 370
уравнение плоскости
— векторное см. векторное уравнение
плоскости
— нормальное см. нормальное уравнение плоскости
— общее см. общее уравнение плоскости
уравнение плоскости в отрезках 322
уравнение плоскости, ортогональной
вектору 320
уравнение плоскости, проходящей через три заданные точки 324
уравнение прямой в отрезках 296
уравнение прямой с угловым коэффициентом 291
уравнение прямой, проходящей через
две заданные точки 293, 336
уравнение с угловым коэффициентом
для прямой, проходящей через заданную точку 292
условие ортогональности плоскостей
325
условие параллельности двух прямых
339
фазовый элемент 205
фокальный параметр параболы 376
фокус
— гиперболы 375
— параболы 376
— эллипса 370
фокусное расстояние эллипса 371
формула
— Кардано 193
— Муавра 191
— Эйлера 190
— обращения произведения матриц 91
— удвоения 414
формулы Виета 211
формулы тригонометрические 425
фундаментальная система решений
154, 155
функция
— временной сложности 30
— дробно-рациональная 75
Х
характеристический полином 241
характеристическое уравнение 241
Ц
центральные кривые 375
Ч
числа Фибоначчи см. последовательность Фибоначчи
чисто мнимое комплексное число см.
комплексное число, чисто мнимое
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Ш
шаг индукции 71
Э
эволюция квантовой системы 198
экспонента от матрицы 76
эксцентриситет
— гиперболы 375
— эллипса 371
443
элемент π/8 205
элементарные преобразования 67, 80,
145
элементы матрицы 17
эллипс 370
эллиптическая кривая 396
эрмитова матрица см. матрица, эрмитова
эрмитово-сопряженная матрица см.
матрица, эрмитово-сопряженная
Сергей Викторович БОРЗУНОВ,
Сергей Дмитриевич КУРГАЛИН
АЛГЕБРА И ГЕОМЕТРИЯ
С ПРИМЕРАМИ НА PYTHON
Учебное пособие
Зав. редакцией литературы по информационным
технологиям и системам связи О. Е. Гайнутдинова
Корректор Т. А. Быченкова
Выпускающие Н. А. Крылова, О. В. Шилкова
ЛР № 065466 от 21.10.97
Гигиенический сертификат 78.01.10.953.П.1028
от 14.04.2016 г., выдан ЦГСЭН в СПб
Издательство «ЛАНЬ»
[email protected]; www.lanbook.com
196105, СанктПетербург, пр. Ю. Гагарина, д. 1, лит. А.
Тел./факс: (812) 3362509, 4129272.
Бесплатный звонок по России: 88007004071
ГДЕ КУПИТЬ
ДЛЯ ОРГАНИЗАЦИЙ:
Для того, чтобы заказать необходимые Вам книги, достаточно обратиться
в любую из торговых компаний Издательского Дома «ЛАНЬ»:
по России и зарубежью
«ЛАНЬТРЕЙД». 196105, СанктПетербург, пр. Ю. Гагарина, д. 1, лит. А.
тел.: (812) 4128578, 4121445, 4128582; тел./факс: (812) 4125493
email: [email protected]; ICQ: 446869967
www.lanbook.com
пункт меню «Где купить»
раздел «Прайслисты, каталоги»
в Москве и в Московской области
«ЛАНЬПРЕСС». 109387, Москва, ул. Летняя, д. 6
тел.: (499) 7227230, (495) 6474077; email: [email protected]
в Краснодаре и в Краснодарском крае
«ЛАНЬЮГ». 350901, Краснодар, ул. Жлобы, д. 1/1
тел.: (861) 2741035; email: [email protected]
ДЛЯ РОЗНИЧНЫХ ПОКУПАТЕЛЕЙ:
интернет5магазин
Издательство «Лань»: http://www.lanbook.com
магазин электронных книг
Global F5: http://globalf5.com/
Подписано в печать 08.07.20.
Бумага офсетная. Гарнитура Школьная. Формат 70×100 1/16.
Печать офсетная. Усл. п. л. 36,08. Тираж 30 экз.
Заказ № 59820.
Отпечатано в полном соответствии
с качеством предоставленного оригиналмакета
в АО «Т8 Издательские Технологии».
Powered by TCPDF (www.tcpdf.org)