Министерство образования и науки
Российской Федерации
Санкт-Петербургский государственный
архитектурно-строительный университет
А. А. ЛУКАШЕВИЧ
ТЕОРИЯ РАСЧЕТА
ПЛАСТИН И ОБОЛОЧЕК
Учебное пособие
Санкт-Петербург
2017
1
УДК 624.04
Рецензенты: д-р техн. наук, профессор А. М. Уздин (Петербургский
государственный университет путей сообщения Императора Александра I);
д-р техн. наук, профессор Л. М. Каган-Розенцвейг (СПбГАСУ)
Лукашевич, А. А.
Теория расчета пластин и оболочек: учеб. пособие / А. А. Лукашевич; СПбГАСУ. – СПб., 2017. – 127 с.
ISBN
Изложены основы теории изгиба пластин и оболочек, а также численно-аналитические и численные методы их расчета. Приводятся основные положения технических теорий изгиба пластин и оболочек, классификация
приближенных методов расчета тонкостенных конструкций. Рассматриваются методы решения краевой задачи для дифференциального уравнения изгиба
пластин в частности, метод конечных разностей и метод Бубнова – Галеркина. Приводятся вариационные постановки для задач изгиба пластин и оболочек и основные методы их решения – вариационно-разностный метод, метод
Ритца – Тимошенко, метод конечных элементов. Изложение материала сопровождается примерами расчетов.
Предназначено для магистрантов и студентов строительных специальностей.
Табл. 4. Ил. 46. Библиогр.: 16 назв.
Рекомендовано Учебно-методическим советом СПбГАСУ в качестве
учебного пособия.
ISBN
© А. А. Лукашевич, 2017
Санкт-Петербургский государственный
архитектурно-строительный университет, 2017
2
ВВЕДЕНИЕ
Одним из важных элементов зданий и сооружений являются
различного рода тонкостенные конструкции, в том числе изгибаемые пластины и оболочки. Присущие этим конструкциям легкость
и рациональность форм сочетаются с их высокой несущей способностью, экономичностью и хорошей технологичностью.
В настоящем учебном пособии изложены теоретические основы задачи изгиба пластин и оболочек, а также практические методы
их решения.
В первой главе приведены основные уравнения теории упругости, на базе которых ведутся дальнейшие теоретические обоснования методов расчета рассматриваемых тонкостенных конструкций. Даются общие понятия и определения изгибаемых пластин,
как вида конструкций; приведены основные уравнения технической
теории изгиба тонких пластин. Рассмотрены примеры аналитического решения некоторых частных задач изгиба пластин.
Во второй главе дана классификация приближенных методов
расчета тонкостенных конструкций, рассмотрены характерные методы решения краевой задачи для дифференциального уравнения
изгиба пластин, в частности, метод конечных разностей и метод
Бубнова – Галеркина.
В третьей главе сформулирована вариационная задача изгиба
пластин, рассмотрены численно-аналитические и численные методы ее решения. Изложены основы вариационно-разностного метода, метода Ритца – Тимошенко, а также рассмотрен наиболее эффективный в настоящее время метод конечных элементов.
Четвертая глава посвящена расчету тонких оболочек. Глава
содержит общие положения теории тонких оболочек, а также основные соотношения и разрешающие уравнения для пологой оболочки. Рассмотрены численные методы расчета оболочек, в частности, вариационно-разностный метод и метод конечных элементов.
Изложение материала сопровождается примерами расчета,
иллюстрирующими рассмотренные приближенные методы решения прикладных задач изгиба пластин и оболочек.
3
Глава 1. ОСНОВЫ ТЕОРИИ РАСЧЕТА
ИЗГИБАЕМЫХ ПЛАСТИН
1.1. Некоторые сведения из теории упругости
1.1.1. Основные уравнения теории упругости
Дифференциальные уравнения равновесия элемента сплошного тела (уравнения Навье):
x xy xz
g x 0;
x
y
z
yx y yz
g y 0;
x
y
z
zx zy z
g z 0.
x
y
z
(1.1)
Здесь x , y , z , xy , xz , yx , yz , zx , zy – компоненты тензора напряжений; g x , g y , g z – компоненты объемных сил.
Закон парности касательных напряжений:
xy yx , yz zy , zx xz .
(1.2)
Линейные геометрические соотношения между деформациями и перемещениями (уравнения Коши):
x
xy
u
v
w
; y ; z
;
x
y
z
u v
v w
w u
; yz
; zx
.
y x
z y
x z
(1.3)
Здесь x , y , z , xy , yz , zx – компоненты тензора деформаций;
u, v, w – компоненты вектора перемещений. Соотношения (1.3)
действительны в предположении малости перемещений по сравнению с характерными размерами тела.
Далее представлены физические соотношения между деформациями и напряжениями (обобщенный закон Гука).
4
Закон Гука в прямой форме:
xy
1
x x ( y z ) ; xy
;
E
G
yz
1
y y ( z x ) ; yz
;
E
G
1
z z ( x y ) ; zx zx .
E
G
(1.4)
Закон Гука в обратной форме:
x 2G x ; xy G xy ;
y 2G y ; yz G yz ;
(1.5)
z 2G z ; zx G zx .
Здесь E – модуль упругости; ν – коэффициент Пуассона; G – модуль сдвига; λ – коэффициент Ламе; θ – объемная деформация.
G
E
E
;
; x y z.
2 (1 )
(1 ) (1 2)
(1.6)
Соотношения (1.4), (1.5) справедливы в предположении линейноупругого поведения материала.
При решении конкретных задач уравнения (1.1) – (1.5) дополняются граничными условиями.
Кинематические условия на участке поверхности Sp:
u us ; v vs ; w ws .
(1.7)
Статические граничные условия (условия Коши):
pnx x cnx xy cny xz cnz ;
pny yx сnx y сny yz сnz ;
pnz zx сnx zy сny z сnz .
(1.8)
Здесь pnx , pny , pnz – компоненты поверхностной нагрузки на участке поверхности тела Sp с нормалью n; сnx , сny , сnz – направляющие косинусы нормали к поверхности тела
сnx cos(n, x); сny cos(n, y); сnz cos(n, z ).
5
1.1.2. Общие подходы к решению задач теории упругости
Перечисленные выше уравнения теории упругости содержат
15 неизвестных функций: шесть компонент напряжений
шесть
компонент
деформаций
x , y , z , xy , yz , zx ;
x , y , z , xy , yz , zx и три компоненты перемещений u, v, w .
Для отыскания этих функций располагаем 15 уравнениями:
тремя дифференциальными уравнениями равновесия (1.1); шестью
геометрическими уравнениями (1.3) и шестью физическими уравнениями (1.4) или (1.5). При этом требуется выполнение граничных
условий на поверхности тела (1.7), (1.8). Таким образом, с математической точки зрения задача может быть решена и сводится к интегрированию указанных 15 уравнений при удовлетворении заданным граничным условиям.
Различают следующие основные постановки задач теории упругости (и соответственно способы их решения):
1. В перемещениях – в качестве основных неизвестных выступают перемещения u, v, w .
2. В напряжениях – в качестве основных неизвестных принимаются напряжения x , y , z , xy , yz , zx .
3. В смешанной форме – в качестве основных неизвестных
выступают и перемещения, и напряжения.
При решении задачи теории упругости в перемещениях необходимо преобразовать уравнения равновесия (1.1), заменив в них
компоненты напряжений на перемещения. Такая замена осуществляется подстановкой в эти уравнения компонент напряжений, выраженных с помощью закона Гука (1.5) и геометрических соотношений Коши (1.3) через перемещения u, v, w .
В результате получим систему разрешающих уравнений в перемещениях
( G )
G 2u g x 0;
x
( G )
G 2v g y 0;
(1.9)
y
( G )
G 2 w g z 0.
z
6
Уравнения (1.9) называются уравнениями Ламе. Здесь
u v w
– объемная деформация, выраженная через ком
x y z
2
2
2
2
поненты перемещений; 2 2 2 – оператор Лапласа.
x y z
Таким образом, уравнения для определения перемещений
объединяют статические, геометрические и физические соотношения теории упругости. Соответственно статические граничные условия (1.8) также должны быть выражены через перемещения.
Решая уравнения (1.9) при удовлетворении граничным условиям, получаем искомые функции перемещений u ( x, y, z ) , v ( x, y, z ) ,
w ( x, y, z ) . По найденным перемещениям из соотношений Коши
(1.3) определяются деформации, а затем из формул закона Гука в
обратной форме (1.5) – напряжения.
При решении задачи в напряжениях одних только уравнений
равновесия (1.1), записанных в напряжениях, недостаточно. Дополнительные уравнения можно получить, исключив из геометрических соотношений Коши (1.3) компоненты вектора перемещений.
Полученные уравнения носят название уравнений неразрывности
деформаций (уравнения Сен-Венана)
2
2
2 x y xy
2
;
xy
y 2
x
2 y
2
2 z yz
2
;
yz
z 2
y
2 z 2 x 2 zx
2
;
zx
x 2
z
2 x
zx xy yz
2
;
x y
z
x
yz
2 y
xy yz zx
2
;
y z
x
y
zx
(1.10)
yz zx xy
2 z
2
.
z x
y
z
xy
Физический смысл уравнений Сен-Венана – условия сплошности деформируемого тела; в математическом смысле они выражают условия интегрируемости соотношений Коши (1.3) при данных компонентах деформаций.
Если в уравнениях (1.10) деформации выразить через напряжения с помощью закона Гука (1.4) с учетом уравнений равновесия
(1.1), то в результате получим шесть уравнений, связывающих компоненты напряжений (уравнения Бельтрами – Мичелла)
7
2 S1
(1 ) x 2 0;
x
2 S1
(1 ) xy
0;
xy
2 S1
(1 ) y 2 0;
y
2 S1
(1 ) yz
0;
yz
2 S1
(1 ) z 2 0;
z
2 S1
(1 ) zx
0.
zx
2
2
2
2
2
(1.11)
2
Здесь S1 x y z – первый инвариант тензора напряжений.
Таким образом, для решения задачи теории упругости в напряжениях приходится интегрировать девять уравнений (1.1) и
(1.11), при этом должны удовлетворяться статические граничные
условия (1.8). Наличие трех «лишних» уравнений (лишние − потому, что неизвестных функций напряжений всего шесть) необходимо для получения однозначного решения. Полученные напряжения
подставляются в формулы закона Гука (1.4) и находятся компоненты деформаций, далее путем интегрирования уравнений Коши (1.3)
определяются перемещения.
При решении задачи теории упругости в смешанной форме
разрешающие уравнения составляются частично относительно перемещений, а частично относительно напряжений. Такой прием,
например, используется при решении задач расчета оболочек [1].
Перечисленные способы применимы к решению так называемой прямой задачи теории упругости, когда заданы действующие
на тело нагрузки в виде объемных ( g x , g y , g z ) и поверхностных
( pnx , pny , pnz ) сил. Требуется определить упругие перемещения,
напряжения и относительные деформации во всех точках рассматриваемого тела (т. е. его напряжено-деформированное состояние).
Прямая задача представляет наибольший практический интерес в
теории расчета конструкций и сооружений.
При решении обратной задачи задаются функциями перемещений или напряжений, удовлетворяющими дифференциальным
уравнениям Сен-Венана (1.10) в первом случае и уравнениям
Бельтрами – Мичелла (1.11) – во втором. Требуется найти остальные неизвестные компоненты напряженно-деформированного состояния, в том числе объемные силы и условия на поверхности.
8
Решение обратной задачи значительно проще, чем прямой, так
как нет необходимости интегрировать систему дифференциальных
уравнений в частных производных; все сводится к несложным математическим операциям (в частности, к дифференцированию или
интегрированию функций).
Так, если заданы функции распределения перемещений
u ( x, y, z ) , v ( x, y, z ) , w ( x, y, z ) , то простым дифференцированием из
уравнений Коши (1.3) определяются деформации, а затем при помощи закона Гука в обратной форме (1.5) – напряжения. Уравнения
совместности деформаций при этом всегда выполняются. Объемные силы находят из дифференциальных уравнений Навье (1.1), а
поверхностные – из уравнений (1.8).
Если заданы напряжения, то относительные деформации определяются при помощи уравнений (1.4), а перемещения – интегрированием уравнений Коши (1.3). Объемные и поверхностные силы получают так же, как и в первом случае.
Для решения отдельных задач теории упругости нередко применяют полуобратный метод Сен-Венана. Суть его состоит в следующем. На основе результатов решения подобных или элементарных задач (или на основе экспериментальных данных) задают
какую-то часть искомых функций, удовлетворяющих основным
уравнениям теории упругости и физическому смыслу рассматриваемой задачи. Если эти «угаданные» функции подставить в разрешающую систему уравнений, то задача существенно упростится за
счет уменьшения числа искомых неизвестных. Решая такую упрощенную задачу, доопределяют неизвестную часть решения.
В заключение отметим, что решение любой задачи теории упругости предполагает удовлетворение уравнений равновесия, выполнение граничных условий и условий неразрывности деформаций. В плане определения компонент напряжений и деформаций
решение задачи является единственным (на основании доказанной
в теории упругости теоремы о единственности решения) и не зависит, каким способом оно получено. При этом компоненты вектора
перемещения определяются с точностью до жесткого смещения упругого тела.
9
1.2. Разрешающие уравнения изгиба тонких пластин
1.2.1. Общие положения и классификация пластин
Пластиной или плитой называется призматическое тело, ограниченное двумя параллельными плоскостями, расстояние между
которыми (толщина h) мало по сравнению с другими характерными размерами (a, b).
Плоскость, равноудаленная от нижней и верхней поверхностей пластины, называется срединной плоскостью. Со срединной
плоскостью совпадает одна из координатных плоскостей декартовой системы координат (x, y), ось z обычно направляется вниз. Линию, ограничивающую срединную плоскость пластины, называют
контуром пластины (рис. 1.1).
x
b
z
h
y
a
h/2
Рис. 1.1. Изгибаемая пластина
Изгиб пластины вызывается нагрузкой, приложенной перпендикулярно срединной плоскости. В деформированном состоянии
срединную плоскость называют срединной поверхностью изогнутой пластины. В теории изгиба пластин срединная поверхность
играет такую же важную роль, как в сопротивлении материалов
нейтральный слой при поперечном изгибе балок. Компоненты перемещения точек срединной поверхности в направлении оси z называются прогибами пластины и обозначаются w.
Пластины имеют широкое применение в строительстве в виде
настилов, панелей, плит перекрытия и т. д. Это объясняется тем,
что присущие тонкостенным конструкциям легкость и рациональность форм сочетаются с их высокой несущей способностью, экономичностью и хорошей технологичностью.
10
Самый распространенный вид пластин – это так называемые
тонкие пластины, у которых отношение толщины к наименьшему
характерному размеру 1/100 ≤ h/b ≤ 1/5. При h/b > 1/5 пластина относится к толстым плитам, которые должны рассчитываться уже
как массивные тела. При h/b < 1/100 пластина превращается в мембрану, которая может работать только при закрепленных по контуру краях. Ее сопротивление на изгиб оказывается ничтожно малым,
а основную роль в восприятии нагрузки играют усилия растяжения
и сдвига в срединной поверхности.
В зависимости от отношения максимального прогиба к толщине пластины (w/h) роль изгибающих и мембранных усилий в
тонкой пластине может быть различной. Поэтому тонкие пластины
разделяют на следующие классы:
1) жесткие пластины (w/h ≤ 1/4), в которых основную роль
играют изгибные силовые факторы (деформациями в срединной
поверхности и мембранными усилиями здесь можно пренебречь), а
зависимость между прогибами и нагрузкой линейна;
2) гибкие пластины (1/4 < w/h ≤ 4), в которых необходимо
учитывать как изгибные, так и мембранные деформации;
3) абсолютно гибкие пластины (w/h > 4), в которых доминируют мембранные деформации, зависимость между прогибами и
нагрузкой является нелинейной.
Деление пластин на жесткие, гибкие и абсолютно гибкие в
значительной степени условно. Поведение пластины под нагрузкой
определяется не только ее геометрическими параметрами. Величины упругих деформаций также существенно зависят от механических свойств материала, условий закрепления пластины, вида нагрузки (статическая или динамическая).
В дальнейшем будем рассматривать только тонкие жесткие
пластины, которые являются расчетными схемами плит перекрытия, дорожных и мостовых плит, плит для эстакад и складчатых
конструкций, фундаментных плит под здания и сооружения и т. п.
При расчете тонких жестких пластин обычно используют так
называемую техническую теорию изгиба пластин, в основе которой лежат гипотезы, предложенные Г. Кирхгофом.
1. Гипотеза прямых нормалей: отрезок нормали к срединной
плоскости пластины остается прямым и нормальным к изогнутой
срединной поверхности, при этом длина его не меняется. Таким об11
разом, предполагается, что сдвиги в плоскостях yz и zx отсутствуют (т. е. γyz = 0, γzx = 0), линейная деформация в направлении оси z
также отсутствует (εz = 0). Данная гипотеза аналогична гипотезе
плоских сечений в теории изгиба балок.
2. Гипотеза о недеформируемости срединной плоскости: в
срединной плоскости отсутствуют деформации растяжения, сжатия
и сдвига, т. е. при изгибе пластины эта плоскость остается нейтральной и ее перемещения u0 = v0 = 0.
3. Гипотеза о ненадавливании слоев: давлением слоев, параллельных срединной плоскости в направлении оси z, пренебрегают
(т. е. полагаем σz = 0).
Гипотезы Кирхгофа являются обобщением гипотезы плоских
сечений, принятой в сопротивлении материалов. Кроме того, при
использовании технической теории изгиба материал пластины считается линейно-упругим и действуют указанные выше ограничения
по прогибам (w/h ≤ 1/4) и по толщине пластины (1/100 ≤ h/b ≤ 1/5).
Однако в связи с тем, что расчет толстых плит существенно сложнее, в ряде случаев по технической теории допускается рассчитывать пластины с отношением h/b до 1/3.
При решении задачи изгиба пластины за основную неизвестную функцию принимается функция прогибов w = w (x, y). Выразив
через прогиб все остальные неизвестные величины, получим разрешающее уравнение относительно неизвестных w. После его решения остальные компоненты напряженно-деформированного состояния пластины определяются с помощью соответствующих
выражений через прогибы w. Таков общий путь решения задачи изгиба пластин.
1.2.2. Перемещения и деформации в пластине
Согласно первой гипотезе Кирхгофа линейная деформация
w
z
0 , отсюда следует, что прогибы пластины w не зависят от
z
координаты z, т. е. w = w (x, y). Это означает, что перемещения всех
точек одной нормали вдоль оси z одинаковы и соответствуют перемещениям точки на срединной плоскости. Следовательно, достаточно определить прогибы срединной плоскости пластины, чтобы
знать перемещения всех ее точек.
12
v w
w u
0 ; zx
0 , отсюz y
x z
w
u
w v
да получаем
. Интегрируя эти уравнения по z
;
y
z
x z
и используя условия u0 = v0 = 0 для срединной плоскости (согласно
w
w
второй гипотезе), получаем u z
; v z
. Подставляя эти
y
x
зависимости в уравнения Коши (1.3), имеем:
По той же гипотезе yz
u
2w
v
2w
u v
2w
x
z 2 ; y
z 2 ; xy
2 z
. (1.12)
x
x
y
y
y x
x y
Как видно, деформации произвольного горизонтального слоя
пластины в направлении оси z меняются по линейному закону и
зависят от трех характерных величин:
1
2w
1
2w
2w
x
2 ; y
2 ;
.
x
x
y
y
x y
(1.13)
Величины x , y составляют кривизны элемента dx × dy изогнутой срединной поверхности пластины; – кривизна кручения данного элемента; x , y – радиусы кривизны элемента срединной поверхности соответственно вдоль оси x либо y.
Таким образом, все перемещения и деформации пластины
оказываются выраженными через одну функцию прогибов ее срединной плоскости w (x, y).
1.2.3. Напряжения и усилия в пластине
Запишем формулы закона Гука (1.4) для линейных деформаций с учетом σz = 0 (согласно третьей гипотезе Кирхгофа):
x
1
1
( x y ) ; y ( y x ) .
E
E
Сложим эти равенства, поочередно умножив каждое из них на коэффициент Пуассона ν:
x y (1 2 ) x / E ;
y x (1 2 ) y / E ,
13
отсюда
x Е1 ( x y ) ; y Е1 ( y x ), где E1 E /(1 2 ) .
С учетом зависимостей (1.12) получаем выражения нормальных напряжений через функцию прогибов w:
2w
2w
x Е1 2 2 z Е1 ( x y ) z ;
y
x
(1.14)
w
w
y Е1 2 2 z Е1 ( y x ) z .
x
y
2
2
Касательное напряжение получим из закона Гука в обратной
форме (1.5) с учетом (1.6) и (1.12):
xy yx
E
2w
xy Е1 (1 )
z Е1 (1 ) z . (1.15)
2 (1 )
x y
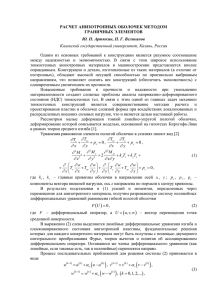
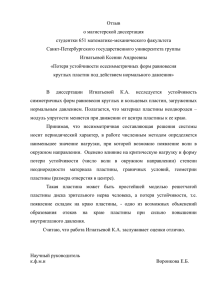
Таким образом, по толщине пластины напряжения σx, σy, τ
изменяются по линейному закону, обращаясь в нуль в точках срединной плоскости. Распределение указанных напряжений по высоте элемента пластины с размерами dx ×dy показано на рис. 1.2.
а)
б)
dx
dx
dy
dy
Mx∙dy
h/2
x
h/2 dz z
y My∙dx
σx
σy
z
H∙dy
h/2
x
h/2
H∙dx
y
z
τxy = τyx = τ
Рис. 1.2. Распределение напряжений по толщине пластины:
а – нормальные напряжения; б – касательные напряжения
Рассмотрим, какие усилия соответствуют напряжениям (1.14),
(1.15) в сечениях пластины, нормальных к ее срединной плоскости
(см. рис. 1.2). Обратимся вначале к площадке с нормалью, парал14
лельной оси x. Напряжения σx на грани элемента h×dy приводятся к
изгибающему моменту Mx ∙ dy:
E1h3
М x dy ( x dz dy ) z Е1 ( x y ) dy z dz
( x y ) dy ,
12
h / 2
h / 2
h/2
h/2
2
где величина Mx называется интенсивностью изгибающего момента, соответствующего напряжению σx. По размерности это момент, деленный на единицу длины сечения (погонный изгибающий
момент), его размерность кН∙м/м, т. е. Mx выражается в единицах
силы. В дальнейшем интенсивность изгибающего момента Mx будем называть просто моментом Mx в данной точке сечения пластины. То же относится и к другим внутренним усилиям.
Соответственно, напряжения τ на площадке h×dy приводятся
к крутящему моменту H ∙ dy:
E1 (1 )h3
H dy ( dz dy ) z Е1 (1 ) dy z dz
dy .
12
h / 2
h / 2
h/2
h/2
2
Здесь величина H является интенсивностью крутящего момента.
Аналогично находим моменты My ∙ dx и H ∙ dx. Подставив выражения кривизн (1.13), получим следующие соотношения для моментов в сечениях пластины, перпендикулярных к ее срединной
плоскости:
2w
2w
М x D ( x y ) D 2 2 ;
y
x
2w
2w
М y D ( y x ) D 2 2 ;
x
y
2w
H D (1 ) D (1 )
.
x y
(1.16)
E1h 3
E h3
Величина D
называется цилиндрической жест12 12 (1 2 )
костью пластины. Эта величина является физико-геометрической
характеристикой пластины при ее изгибе и играет ту же роль, что и
жесткость сечения EI при изгибе балок. Отметим также, что ввиду
парности касательных напряжений крутящий момент H на перпендикулярных гранях элемента пластины одинаков.
15
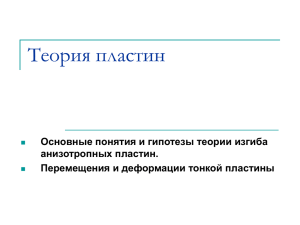
На рис. 1.3, а показаны положительные значения изгибающих
и крутящих моментов, причем положительные направления усилий
совпадают с направлением действия соответствующих положительных составляющих напряжений.
а)
б)
dx
dy
dy
H
Qx
Mx
y x
h/2
H
h/2
My
y
dx
Qy
τxz
h/2
h/2
y
x
τyz
Qx
z
Qy
y
z
Рис. 1.3. Усилия и напряжения в пластине:
а – изгибающие и крутящие моменты; б – поперечные силы и напряжения
Изгибающие моменты Mx и My создают искривление элемента
пластины с кривизнами x и y . Крутящие моменты H создают
деформацию сдвига горизонтальных слоев элемента, изменяющуюся по толщине пластины по линейному закону.
Выразив кривизны в (1.16) через погонные моменты и подставив в формулы для напряжений (1.14), (1.15), получим:
x Е1 ( x y ) z E1
Mx
12 M x
z
z;
D
h3
y Е1 ( y x ) z E1
My
Е1 (1 ) z E1
D
z
12 M y
h3
z;
(1.17)
H
12 H
z 3 z.
D
h
Как видно, формулы для нормальных напряжений совпадают
с формулами сопротивления материалов при изгибе балки прямоугольного сечения высотой h и шириной, равной единице.
Максимальные значения напряжений возникают при z h 2 :
x max
16
6M y
6M x
6H
;
;
.
y max
max
h2
h2
h2
(1.18)
Кроме моментов в сечениях пластины действуют поперечные
силы, интенсивности которых обозначим Qx и Qy. Им отвечают касательные напряжения τxz и τyz, величины которых малы по сравнению с величинами напряжений x, y, xy (распределение касательных напряжений τxz, τyz по толщине пластины соответствует закону
квадратной параболы – рис. 1.3, б).
Как уже упоминалось, моменты Mx, My и H, а также усилия Qx
и Qy положительны, если для точки пластины с координатой z > 0
они дают положительные напряжения. Индексы при усилиях соответствуют нормали к сечению, в котором действуют эти усилия.
1.2.4. Дифференциальное уравнение изгиба пластины
Таким образом, внутренние усилия и напряжения в пластине
однозначно выражены через прогибы ее срединной плоскости. После того, как перемещения w будут определены, все остальные результаты могут быть получены при помощи операций дифференцирования. Другими словами, функция прогибов w (x, y) полностью
определяет напряженно-деформированное состояние пластины.
Для отыскания этой неизвестной функции необходимо составить
разрешающее уравнение относительно прогибов w.
Рассмотрим равновесие элемента пластины размерами dx×dy
под действием приложенной к нему (перпендикулярно к срединной
плоскости) поверхностной нагрузки q и погонных внутренних
усилий на границах элемента (рис. 1.4).
H
H
x
My
q
0
Mx
M y
z
H
M y
y
H
dx
x
M x
M x
dx
x
Qy
H
dy
dx
Qx
dx
x
q
dy
y
Qx
x
H
dy
y
0
z
Qx
Qy
Qy
y
dy
y
dy
dx
Рис. 1.4. Элемент срединной плоскости пластины
17
Учитываем, что при переходе от одной грани элемента к другой грани, отстоящей на бесконечно малое расстояние dx или dy,
внутренние усилия получают также бесконечно малые приращения
M x
на величину частного дифференциала, например M x
dx .
x
При этом все погонные усилия следует умножать на длину грани,
по которой они действуют.
Спроецируем все силы, приложенные к элементу, на ось z:
(Qx
Qy
Qx
dx) dy Qx dy (Qy
dy ) dx Qy dx q dx dy 0.
x
y
После приведения подобных членов получим
Qx Q y
q.
x
y
(1.19)
Аналогично из уравнений моментов всех сил относительно
осей y и x, пренебрегая величинами более высокого порядка малости, получаем:
M y H
M x H
Qx ;
Qy .
(1.20)
x
y
y
x
Таким образом, уравнения (1.19), (1.20) полностью определяют равновесие элемента пластины. Исключим из этих уравнений
поперечные силы Qx и Qy: определив их из уравнений (1.20) и подставив в уравнение (19), будем иметь
2
2М x
2H М y
2
q.
x 2
x y
y2
Подставив в это уравнение выражения моментов через функцию прогибов (1.16) и упростив, получим
4w
q
4w
4w
D 4 2 2 2 4 q или 4 w .
D
x y
y
x
18
(1.21)
2
2
2
Здесь w w 2 ( w) 2 ( 2 w) – бигармонический
x
y
2w 2w
2
оператор Лапласа; w
2 – обычный (гармонический)
2
x
y
оператор Лапласа от функции прогибов w (x, y) пластины.
Уравнение (1.21) представляет собой дифференциальное
уравнение изогнутой срединной поверхности пластины, его называют также уравнением Софи Жермен – Лагранжа (или просто
уравнением Софи Жермен). Данное уравнение играет фундаментальную роль в теории изгиба пластин.
После нахождения из уравнения (1.21) функции прогибов w (x, y)
по приведенным ранее формулам можно определить все компоненты напряженно-деформированного состояния в произвольной точке
пластины. Вместе с тем решение дифференциального уравнения
приводит к появлению постоянных интегрирования, определяемых
из условий на контуре пластины – граничных условий.
4
2
2
1.2.5. Формулировка граничных условий
В зависимости от характера закрепления краев на контуре
пластины могут быть заданы прогибы и углы поворота срединной
плоскости, изгибающие и крутящие моменты, а также поперечные
силы. Граничные условия, при которых на каком-либо участке контура задаются перемещения (т. е. прогибы и углы поворота), называются геометрическими. Граничные условия, при которых на
участке контура задаются усилия (т. е. моменты и силы), называются статическими. Если же на одном участке контура заданы одновременно и перемещения и усилия, то такие граничные условия называются смешанными.
Уравнение Софи Жермен является дифференциальным уравнением четвертого порядка. Поскольку прогибы являются функцией двух переменных (x, y), при интегрировании уравнения (1.21)
для прямоугольной пластины появляется необходимость учета
восьми граничных условий – по два условия на каждом краю.
Сформулируем граничные условия для различных случаев закрепления краев прямоугольной пластины. На рис. 1.5 изображена
19
пластина, у которой край y = 0 жестко заделан, края x = 0 и x = a
шарнирно оперты, а край y = b свободен от закреплений.
0
x
b
a
y
Рис. 1.5. Прямоугольная пластина с различными закреплениями краев
Заделанный (или защемленный) край. В этом случае на соответствующем участке контура пластины отсутствуют прогибы и
невозможен поворот краевого сечения в направлении, перпендикулярном к этому краю. Таким образом, для края y = 0 имеем
w0
y
;
y0
w
0
y
y0
.
(1.22)
Эти условия аналогичны условиям заделки изгибаемой балки.
Шарнирно опертый край. Здесь отсутствуют прогибы и изгибающие моменты в направлении, перпендикулярном к этому
краю, т. е. при x = 0 и x = a имеем w = 0 и Mx = 0. Выразив момент
Mx через прогиб (1.16) и учитывая, что вдоль рассматриваемых
w 2 w
0 , в итоге получим
краев изгиба нет, т. е.
y y 2
w0
x 0, a
;
2w
0
x 2
x 0, a
.
(1.23)
Условия (1.23) справедливы для опирания краев пластины на жесткие шарнирные опоры. Также отметим, что если к какому-либо
шарнирно опертому краю будет приложен внешний распределенный момент mx, то второе условие из (1.23) нужно записать в слеmx
2w
дующем виде:
.
D
x 2
20
Свободный край. В отсутствие на этом участке контура внешних силовых факторов (погонных нагрузок) все погонные внутренние усилия также должны быть равны нулю. Так, для края y = b
My 0
y b
; Qy 0
y b
; H 0
y b
(1.24)
.
Таким образом, вместо двух необходимых условий здесь появляются три условия. Однако при использовании приближенной
теории Кирхгофа в общем случае нельзя одновременно удовлетворить двум последним условиям (1.24) [1]. Это противоречие можно
устранить, заменив поперечную силу Qy и крутящий момент H одной вертикальной обобщенной силой, статически им эквивалентной
и отвечающей прогибу w, как обобщенному перемещению:
Vy Qy Qy ,
(1.25)
где ∆Qy – дополнительная поперечная сила, статически эквивалентная крутящему моменту H. Тогда, как и в предыдущих случаях
опирания, для свободного края возможно удовлетворить не трем, а
только двум силовым условиям, соответствующим только двум независимым перемещениям на кромке пластины.
H∙dx
a)
B
C
x
dx
H
б)
H
H
dx
x
B
C
x
H
в)
в
H
B
H
x
dx
dx
H
H
dx
x
H
C
x
Рис. 1.6. Представление крутящих моментов на грани пластины
21
Рассмотрим действие крутящих моментов, распределенных
вдоль грани ВС, на свободном краю y = b (рис. 1.6, а). На элементарном участке dx действует крутящий момент, равный H ∙ dx, коH dx
торый можно представить в виде пары сил H
с плечом dx.
dx
На соседнем участке dx эта пара сил получит приращение dH и буH
дет равна H
dx с таким же плечом dx (рис. 1.6, б).
x
При таком представлении действие крутящих моментов можно заменить вертикальной распределенной нагрузкой интенсивноH
стью
и сосредоточенными силами H, возникающими в углах
x
B и C (рис. 1.6, в). Суммируя эту нагрузку согласно (1.25) с поперечной силой Qy, получим следующие два условия для свободного
края y = b:
H
M y 0 y b ; Qy
0 y b.
(1.26)
x
Выразив усилия через функцию прогибов, запишем граничные
условия (1.26) в таком виде:
2w
2w
2 0
y2
x
y b
;
2w
2w
(2 ) 2 0
y y 2
x
y b
.
(1.27)
В случае же, если свободный край будет задан на гранях пластины, перпендикулярных оси x, по аналогии с (1.27) граничные
условия для x = 0, x = a запишутся так:
2w
2w
2 0
x 2
y
x 0, a
;
2w
2w
(2 ) 2 0
x x 2
y
x 0, a
.
(1.28)
Конечно, при этом граничные условия на свободной грани будут удовлетворяться приближенно. Но на основании принципа СенВенана замена поперечной силы и крутящего момента статически
им эквивалентной обобщенной поперечной силой вызовет лишь
местные напряжения вблизи рассматриваемого свободного края
пластины [1, 12].
22
1.3. Решение задач изгиба прямоугольных пластин
1.3.1. Элементарные случаи изгиба пластин
Таким образом, расчет тонких упругих пластин сводится к
решению краевой задачи для дифференциального уравнения изогнутой поверхности пластины
4w
4w
4w
q
2
,
4
2
2
4
x
x y
y
D
(1.29)
где w = w (x, y) – функция прогибов срединной плоскости пластины;
q = q (x, y) – распределенная поверхностная нагрузка, перпендикулярная срединной плоскости пластины.
Краевой задачей называется задача нахождения такого решения дифференциального уравнения, которое удовлетворяет определенным условиям на границах (краях) рассматриваемой области.
Точное ее решение в аналитической форме возможно лишь в некоторых частных случаях геометрии пластины, ее нагружения и условий закрепления. Вместе с тем точные аналитические решения задач являются своеобразным эталоном, с которым можно сравнивать
решения, полученные различными приближенными методами.
Рассмотрим некоторые простые случаи изгиба пластин,
имеющие важное значение для понимания особенностей их работы.
При этом решение данных задач не вызывает особых затруднения.
1. Цилиндрический изгиб пластины
Представим себе бесконечно длинную в направлении оси y
пластину (рис. 1.7), нагрузка q на которую постоянна вдоль этой же
оси и изменяется только по оси x, т. е. q = q (x). Очевидно, что все
полоски единичной ширины, выделенные из этой пластины вдоль
оси x, будут изгибаться одинаково, следовательно, в целом пластина окажется изогнутой по цилиндрической поверхности w = w (x).
0
y
a
1
x
q0
Рис. 1.7. Цилиндрический изгиб пластины
23
Поскольку функция прогибов в этом случае не зависит от y,
полагаем в (1.29) производные по y равными нулю. В результате
дифференциальное уравнение изгиба примет следующий вид:
d 4 w ( x) q ( x)
.
d x4
D
(1.30)
Здесь используется обыкновенная (а не частная) производная,
поскольку w зависит только от одного аргумента x. Уравнение
(1.30), описывающее цилиндрический изгиб пластины, совпадает с
уравнением изгиба балки, у которой жесткость сечения на изгиб EI
равна цилиндрической жесткости пластины D (EI = D). Отсюда величина D получила наименование цилиндрической жесткости.
Интегрирование дифференциального уравнения цилиндрического изгиба пластины при любом законе поперечной нагрузки q (x)
не вызывает особых сложностей, поэтому задача решается точно.
Пусть, например, q = q0 x/a (см. рис. 1.7), тогда после четырехкратного интегрирования уравнения (1.30) получим
q0 x 5
w C1 C2 x C3 x C4 x
,
120 a D
2
3
(1.31)
где С1, С2, С3, С4 – четыре постоянные интегрирования, определяемые из четырех граничных условий (по два условия для заделанного края x = 0 и шарнирно опертого края x = a):
w
w 0 x 0;
0
x
2w
; w 0 x a;
0
x0
x 2
xa
.
(1.32)
Подставив прогибы w (1.31) и их производные в граничные условия (1.32) и решив систему из четырех алгебраических уравнений,
7q0 a 2
9q a
находим С1 = С2 = 0, C3
, C4 0 . В результате полу240 D
240 D
чим следующее выражение для прогибов:
q0 a 4 x 2
x3
x5
7 9 3 2 5 .
w ( x)
240 D a 2
a
a
(1.33)
При цилиндрическом изгибе, когда производные по y равны
нулю, выражения для моментов (1.16) примут вид
24
2w
2w
М x D 2 ; М y D 2 М x ; H 0 .
x
x
(1.34)
С учетом (1.33) имеем следующую зависимость для момента:
q0 a 2
x
x3
7 27 20 3 .
M x ( x)
120
a
a
2. Чистый изгиб пластины
Рассмотрим прямоугольную пластину, свободную от закреплений и нагруженную по контуру распределенными моментами постоянной интенсивности m1 = const и m2 = const соответственно
(рис. 1.8, а). Начало координат поместим в центре пластины.
б)
а)
z
y
x
x
m1
y
m2
z
Рис. 1.8. Чистый изгиб пластины
Поскольку поперечная нагрузка отсутствует, имеем однородное дифференциальное уравнение изгиба
4w
4w
4w
2 2 2
0,
x 4
x y
y4
(1.35)
решение которого будем искать в виде
w 0,5 (C1x 2 C2 y 2 ) .
(1.36)
Постоянные интегрирования С1 и С2 найдем из граничных условий Mx = m1 и My = m2. Подставив (1.36) в (1.16), получим
2w
2w
М x D 2 2 D C1 C2 m1 ;
y
x
2w
2w
М y D 2 2 D C2 C1 m2 ;
x
y
2w
H D (1 )
0.
x y
25
Из решения первых двух уравнений находим
C1
m2 m1
m1 m2
; C2
.
2
D (1 )
D (1 2 )
Тогда выражение для прогибов (1.36), т. е. уравнение изогнутой
поверхности пластины (рис. 1.8, б), запишется в виде
w ( x, y )
1
2 D (1 2 )
( m m ) x 2 ( m m ) y 2 .
2
1
1
2
(1.37)
Во всех сечениях пластины, параллельных осям x и y, действуют только постоянные изгибающие моменты Mx = m1 и My = m2.
Другие внутренние усилия отсутствуют: H = Qx = Qy = 0.
Рассмотрим несколько частных случаев. Пусть m1 = m2 = m, тогда
w ( x, y )
m
x2 y2 .
2 D (1 )
Это уравнение параболоида вращения. Изогнутая поверхность в
этом случае представляет часть сферы, так как радиусы кривизны
одинаковы во все точках пластины.
Возьмем другой частный случай: m1 = m; m2 = 0. Уравнение
(1.37) примет следующий вид:
m
x 2 y 2 .
w ( x, y )
2
2 D (1 )
Поверхность, описываемая этим уравнением, имеет седлообразную
форму и называется гиперболическим параболоидом (горизонталями ее являются гиперболы). Благодаря влиянию коэффициента
Пуассона пластина изгибается не только в плоскости действия момента Mx = m, но получает и обратный выгиб в перпендикулярной
плоскости.
Наконец, примем m1 = m; m2 = –m. В этом случае уравнение
прогибов также имеет вид гиперболического параболоида:
w ( x, y )
m
x 2 y 2 .
2 D (1 )
Нетрудно показать, что при таком нагружении в косых сечениях
пластины, наклоненных к осям x и y на угол α = 45°, пластина испытывает деформацию чистого кручения, т. е. Hα = –m, Mα = 0.
26
1.3.2. Решение прямой и обратной задач изгиба пластин
Прямая задача изгиба пластины формулируется следующим
образом: заданы нагрузка и граничные условие; требуется определить прогибы пластины и действующие в ней внутренние усилия.
Решение прямой задачи затруднено необходимостью интегрировать
дифференциальное уравнение изгиба (1.29) и, главное, удовлетворять разнообразным граничным условиям.
Рассмотрим шарнирно опертую по контуру прямоугольную
пластину, нагруженную поперечной нагрузкой. Интенсивность
распределенной нагрузки зададим в виде тригонометрической
x
y
функции q q0 sin
(рис. 1.9). Решение задачи – функцию
sin
a
b
прогибов пластины w, удовлетворяющую заданной нагрузке и граничным условиям, будем искать в аналогичном виде.
q0
b/2
x
b/2
a/2
a/2
y
a/2
Рис. 1.9. Прямоугольная шарнирно опертая пластина
Дифференциальное уравнение изгиба пластины запишется в
таком виде:
4w
4w
4 w q0
x
y
2
sin
sin
.
(1.38)
D
a
b
x 4
x 2 y 2
y4
Граничные условия для шарнирно опертой по контуру пластины
w0
x 0, a
;
2w
0
x 2
x 0, a
;
w0
y 0, b
;
2w
0
y2
y 0, b
. (1.39)
Решение уравнения (1.38) зададим в форме его правой части:
w C sin
x
y
sin .
a
b
(1.40)
27
Функция прогибов, записанная в виде (1.40), соответствует
характеру деформации пластины и граничным условиям (1.39). Определим постоянную C, равную амплитуде прогиба в центре пластины. После подстановки функции прогиба (1.40) в уравнение
(1.38) и сокращения на тригонометрические множители получаем
2
2 2 q0
q0 a 4b 4
С 2 2 , отсюда С w0
.
4
2
2 2
a
b
D
D
(
a
b
)
В результате уравнение изогнутой поверхности пластины
(1.40) примет вид
q0 a 4b 4
x
y
w
sin
sin
.
a
b
D 4 (a 2 b 2 ) 2
Если интенсивность распределенной нагрузки задается в виде
2
2 2
m x
n y
m
n
, то С q0 D 4 2 2 и функция прогиба
q q0 sin
sin
b
a
b
a
w
q0
D m a n b
4
2
2
2
2 2
sin
m x
n y
sin
.
a
b
(1.41)
Имея функцию прогиба, можно определить все компоненты
напряженно-деформированного состояния в любой точке пластины.
Постановки обратной задачи изгиба пластины более разнообразны. Здесь могут быть заданы либо уравнение упругой поверхности пластины, либо распределение напряжений или деформаций.
Требуется найти все остальные неизвестные компоненты, определяющие напряженно-деформированное состояние пластины.
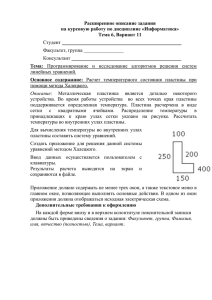
Рассмотрим прямоугольную пластину (рис. 1.10). Зададимся
уравнением изогнутой срединной поверхности пластины в виде
x
3y
, C = const; a = 2b; ν = 0,3.
w C sin
sin
a
b
0
x
b
a
y
Рис. 1.10. Прямоугольная пластина
28
Требуется:
1) установить, каким граничным условиям удовлетворяет заданное уравнение упругой поверхности w (x, y);
2) определить постоянный коэффициент С, используя дифференциальное уравнение изгиба пластины;
3) составить выражения для изгибающих моментов Mx, My и
крутящего момента H;
4) построить эпюры моментов (в долях от q0 и b) в сечениях,
параллельных осям x и y.
Решение
1. Составим выражения для углов поворота.
В направлении оси x:
w
x
3y
.
x
C cos sin
x
a
a
b
2w
0 , но x 0 , следовательно,
Так как при x = 0 имеем w 0;
x 2
по этой грани пластина шарнирно оперта. При x = a также имеем
2w
w 0;
0 , x 0 , т. е. и эта грань пластина шарнирно оперта.
x 2
В направлении оси y:
w
3
x
3y
y
C
sin
cos
.
y
b
a
b
2w
0 , y 0 , то по этой грани пластина
Так как при y = 0 w 0;
y2
шарнирно оперта. При y = b по тем причинам пластина также шарнирно оперта. Таким образом, по всем своим граням пластина является шарнирно опертой (рис. 1.11).
2. Составим дифференциальное уравнение изогнутой срединной поверхности пластины. Вычислим производные от функции
прогиба w (x, y). Для сокращения записи введем обозначения:
2w
2w
x
3 y
; Y
; wx 2 ; wy 2 ;
X
a
b
y
x
4w
4w
4w
IV
IV
wx 4 ; wy 4 ; wxy 2 2 .
x
y
x y
IV
29
Тогда получим:
2
9 2
wx C 2 sin X sin Y ; wy C 2 sin X sin Y ;
a
b
4
814
9 4
IV
IV
wx C 4 sin X sin Y ; wy C 4 sin X sin Y ; wxy C 2 2 sin X sin Y .
a
b
ab
IV
При этом функцию поперечной нагрузки будем задавать в
аналогичном виде:
x
3y
q q0 sin X sin Y q0 sin
sin
.
a
b
Подставим значения производных и выражение для нагрузки в
дифференциальное уравнение изгиба (1.29):
q
18 81
1
C 4 sin X sin Y 4 2 2 4 0 sin X sin Y .
D
ab b
a
q0 b 4
q0 b 4
Отсюда, подставив a = 2b, получим: C
.
85,56 D 4
8317 D
3. Выражения для моментов Mx, My и H будут следующими:
q0b 2
1
9
М x D wx wy D C sin X sin Y 2 2
sin X sin Y ;
286
b
a
2
q0b 2
9
1
М y D wy wx D C sin X sin Y 2 2
sin X sin Y ;
93,5
a
b
2
2
q0b 2
2w
2 3
H D (1 )
D (1 ) C
cosX cos Y
cosX cos Y .
x y
ab
803
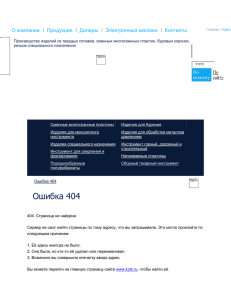
4. Покажем изменение интенсивности распределенной нагрузки q вдоль осей симметрии пластины. На оси симметрии x = a/2 получим q q0 sin (3y/b) , значения q вычисляем при y = 0; b/4; b/2;
3b/4; b. На оси симметрии y = b/2 имеем q q0 sin (x/a) , значения q
вычисляем при x = 0; a/4; a/2; 3a/4; a. Характер изменения поперечной нагрузки приводится на рис. 1.11.
5. Строим эпюры изгибающих моментов по осям симметрии
(x = a/2 и y = b/2), эпюры крутящих моментов по граням x = 0 и y = 0.
30
Подставляя абсциссу x = a/2 (при этом sin X = 1) в выражения
для Mx и My, а x = 0 (cos Y = 1) в выражение для H, получим
q0b 2
q0b 2
q0b 2
3y
3y
3y
Мx
sin
; Мy
sin
; H
cos
.
286
b
93,5
b
803
b
Результаты вычислений приведены в табл. 1.1 и 1.2.
Таблица 1.1
Вычисление ординат эпюр Mx, My и H в сечениях, параллельных оси y
y
sin(3πy/b)
cos(3πy/b)
Mx (q0 b2)
My (q0 b2)
H (q0 b2)
0
0
1
0
0
1,25 ∙ 10–3
b/4
0,707
–0,707
–2,47 ∙ 10–3
–7,56 ∙ 10–3
–0,88 ∙ 10–3
b/2
–1
0
3,5 ∙ 10–3
10,7 ∙ 10–3
0
3b/4
0,707
0,707
–2,47 ∙ 10–3
–7,56 ∙ 10–3
0,88 ∙ 10–3
b
0
–1
0
0
–1,25 ∙ 10–3
Подставляя y = b/2 (sin Y = –1) в выражения для Mx и My, а y = 0
(cos Y = 1) в выражение для H, получим:
q0b 2
q0b 2
q0b 2
x
x
x
Мx
sin ; М y
sin ; H
cos .
286
a
93,5
a
803
a
Таблица 1.2
Вычисление ординат эпюр Mx, My и H в сечениях, параллельных оси x
X
sin(πx/a)
cos(πx/a)
Mx (q0 b2)
My (q0 b2)
H (q0 b2)
0
0
1
0
0
1,25 ∙ 10–3
a/4
0,707
0,707
2,47 ∙ 10–3
7,56 ∙ 10–3
0,88 ∙ 10–3
a/2
1
0
3,5 ∙ 10–3
10,7 ∙ 10–3
0
3a/4
0,707
–0,707
2,47 ∙ 10–3
7,56 ∙ 10–3
–0,88 ∙ 10–3
a
0
–1
0
0
–1,25 ∙ 10–3
Эпюры Mx, My и H приведены на рис. 1.11.
31
q0
x
0,707q0
0,707q0
7,56
0
2,47
b/2
7,56
0,88
2,47
b/2
0,707q0
y
a/2
0
–3
10,7
2
–3
1,25
Mx (10 q0b ) My (10 q0b ) H (10–3q0b2)
a/2
a/2
2,47
0 0,88
3,5
0
0,707q0
1,25
0
2
Mx (10–3q0b2)
3,5
2,47
My (10–3q0b2)
7,56
1,25
0,88
10,7
7,56
H (10–3q0b2)
0,88
1,25
Рис. 1.11. Результаты решения обратной задачи изгиба пластины
1.3.3. О расчете ортотропных пластин и пластин
на упругом основании
Ортотропной пластиной в общем случае называется пластина, жесткостные свойства которой неодинаковы по направлениям
координатных осей x и y.
В частности, к таким пластинам относятся пластины, изготовленные из ортотропного материала, при этом закон Гука выражается следующими зависимостями:
x
xy
x
xy y ; y y yx x ; xy
,
Ex
Ey
Ey
Ex
Ex
где xy Ex yx E y . Если повторить все рассуждения, приведенные
для изотропных пластин, то вместо (1.16) придем к следующим соотношениям для моментов [1, 12, 16]:
2w
2w
М x D1 2 xy 2 ;
y
x
2w
2w
М y D2 2 yx 2 ;
x
y
32
2w
H D
.
x y
(1.42)
Здесь введены обозначения жесткостей:
E y h3
Ex h3
G h3
D1
; D2
; D
.
12 (1 xy yx )
12 (1 xy yx )
12
Дифференциальное уравнение изгиба, аналогичное уравнению
(1.29), будет иметь вид
4w
4w
4w
D1 4 2 D3 2 2 D2 4 q( x, y ) ,
x
x y
y
(1.43)
где D3 D1 xy 2D D2 yx 2D .
Для решения уравнения (1.43) применимы те же способы, что
и для решения задачи изгиба изотропных пластин. Так, при задании
поверхности прогибов в форме (1.41), постоянная
С
q0
m4
m2n2
n4
4
D1 4 2 D3 2 2 D2 4
ab
b
a
.
Заметим, что иногда для упрощения решения задачи приближенно принимают D3 D1 D2 . В этом случае, как можно установить, уравнение (1.43) приводится к обычному дифференциальному
уравнению для изотропной пластины
4w
4w
4w
q
2
,
D1
x 4
x 2 y12 y14
(1.44)
где приведенная переменная y1 y 4 D1 D2 . Решение этого уравнения производится так же, как для условной изотропной пластины, у
которой вместо длины стороны b принят размер b1 b 4 D1 D2 .
Рассмотрим теперь конструктивно ортотропную пластину.
Так называется изотропная пластина, усиленная ребрами жесткости
как в одном, так и в другом направлениях (рис. 1.12). Такая ребристая прямоугольная пластина, ребра которой параллельны её сторонам, проявляет в общем случае различные жесткостные характеристики в направлениях x и y. Ее расчет можно приближенно
выполнить как расчет условной ортотропной пластины с жесткостями D1, D2 и D3, входящими в уравнение (1.43).
33
x
s1
b
s1
s2 s2
a
a/2
y
a/2 Конструктивно
a/
Рис. 1.12.
ортотропная пластина
2
Пусть для ребер, параллельных оси x, жесткость на изгиб –
EI1, на кручение – GIкр1, а шаг расстановки этих ребер – s1. Соответственно для ребер, параллельных оси y, это будут EI2, GIкр2 и s2. Если изгибающие и крутящие моменты, возникающие в сечениях ребер, условно равномерно распределить по длине соответствующего
шага расстановки ребер, то указанные жесткости для ортотропной
пластины будут:
D1 D
E I1
EI
1 G I кр 1 G I кр 2
; D2 D 2 ; D3 D
,
s1
s2
2 s1
s2
где D – цилиндрическая жесткость непосредственно самой изотропной пластины, которая усиливается ребрами жесткости. При
отсутствии ребер уравнение (1.43) будет эквивалентно уравнению
(1.29), а при отсутствии самой пластины (D = 0) уравнение (1.43)
будет приближенно описывать изгиб системы перекрестных балок
(балочной клетки).
Заметим, что если ребра жесткости стоят несимметрично относительно срединной плоскости пластины (рис. 1.13), то расчет
такого рода ребристой пластины усложняется, так как в срединной
поверхности появляются мембранные усилия даже при малых прогибах. Но, упрощая задачу, нередко уравнение (1.43) применяют и
при несимметричном расположении ребер жесткости.
x
s1
b
s1
s2 s2
a
a/2
y
a/2
a/
Рис. 1.13. Пластина с несимметричным расположением ребер
2
34
Рассмотрим пластину, лежащую на сплошном деформируемом
основании (рис. 1.14). В этом случае при записи дифференциального уравнения изгиба необходимо учесть распределенную по площади пластины реакцию (отпор) основания интенсивностью r = r (x, y).
0
x
q (x,y)
q (x,y)
b
r (x,y)
a
y
Рис. 1.14. Пластина на упругодеформируемом основании
Тогда уравнение изгиба пластины запишется так:
qr
(1.45)
,
D
где q – интенсивность внешней распределенной нагрузки. В зависимости от свойств деформируемого основания связь между реакцией основания r и его деформированным состоянием может быть
различной. На практике очень часто используют известную модель
Винклера, согласно которой r (x, y) = kу ∙ w (x, y), где kу – коэффициент жесткости упругого основания (коэффициент постели).
Подставив значение r в (1.45) и перенеся член, содержащий
неизвестную функцию w, в левую часть, окончательно получим
дифференциальное уравнение изгиба пластины, лежащей на упругом винклеровском основании
kу
q
(1.46)
4w w .
D
D
Для решения уравнения (1.46) применяется любой из рассмотренных ранее способов. Например, для шарнирно опертой по конm x
n y
туру пластины при нагрузке в виде q q0 sin
получим
sin
a
b
q0
m x
n y
w
sin
sin
.
4
2
2
2
2 2
a
b
D m /a n /b k
4w
у
35
Контрольные вопросы
1. Какие группы уравнений составляют систему основных
уравнений теории упругости?
2. Какими условиями дополняются уравнения теории упругости при решении конкретных задач?
3. Укажите основные способы решения задач теории упругости.
4. Как может быть получена система разрешающих уравнений
теории упругости в перемещениях?
5. Какие уравнения требуется интегрировать при решении задач в напряжениях?
6. В чем заключается решение задачи теории упругости в
смешанной форме?
7. Какая задача называется прямой задачей теории упругости?
8. Какое тело называется пластиной, что понимается под срединной плоскостью?
9. Что называется срединной поверхностью изогнутой пластины и ее прогибом?
10. Приведите классификацию пластин по отношению ее
толщины к характерному размеру.
11. Как разделяются тонкие пластины по отношению максимального прогиба к ее толщине?
12. При каких толщинах и прогибах пластина считается тонкой и жесткой?
13. Перечислите гипотезы Кирхгофа, используемые в теории
расчета тонких пластин.
14. Изложите гипотезу прямой нормали. Что из нее следует?
15. Приведите гипотезу о недеформируемости срединной поверхности в ее плоскости.
16. Сформулируйте гипотезу о ненадавливании слоев. Что из
нее следует?
17. Какие дополнительные условия приняты в технической
теории изгиба пластин?
18. Какие перемещения и деформации учитываются при расчете тонких пластин?
19. Какие величины (и какой зависимостью) связывают уравнения Коши в пластине?
20. Что такое кривизны срединной поверхности пластины?
36
21. Какие компоненты напряжений учитываются при расчете
тонких пластин?
22. Какие внутренние усилия учитываются при расчете тонких
пластин? Какое у них правило знаков?
23. Запишите выражения для моментов в сечениях пластины
через функцию прогибов.
24. Приведите формулу цилиндрической жесткости пластины.
Что она характеризует?
25. Запишите формулы для определения напряжений в сечениях пластины.
26. Из каких условий может быть получено уравнение Софи
Жермен – Лагранжа?
27. Приведите уравнение Софи Жермен – Лагранжа. Как оно
еще называется?
28. Какие условия для пластины называются граничными?
Какого типа они бывают?
29. Перечислите основные типы закрепления краев прямоугольной пластины.
30. Запишите граничные условия для заделанного края пластины, какого типа эти условия?
31. Приведите граничные условия для шарнирно-опертого
края. Какого типа эти условия?
32. Сформулируйте граничные условия для свободного края
прямоугольной пластины.
33. Какого вида задача называется краевой задачей?
34. При каких условиях возникает цилиндрический изгиб пластины?
35. При каких условиях возникает чистый изгиб прямоугольной пластины?
36. Сформулируйте прямую задачу изгиба пластины.
37. Приведите постановку обратной задачи изгиба пластины.
38. Какая пластина называется ортотропной, конструктивно
ортотропной?
39. Запишите дифференциальное уравнение изгиба для ортотропной пластины.
40. Приведите уравнение Софи Жермен для пластины, лежащей на упругом основании.
37
Глава 2. МЕТОДЫ ПРИБЛИЖЕННОГО РЕШЕНИЯ
ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ИЗГИБА
Как уже отмечалось, решение уравнения изгиба пластины
(1.29) в аналитической форме возможно лишь в некоторых частных
случаях задания нагрузки и граничных условий. Точного решения
для большинства практических задач изгиба пластин до сих пор не
получено, поскольку интегрирование дифференциальных уравнений, к которым они приводятся, представляет большие математические трудности. Поэтому важное значение для инженерной практики имеют приближенные, но достаточно общие методы решения
задач прикладной механики деформируемого тела. В данном пособии рассматриваются приближенные методы, характерные для задач изгиба пластин, но с таким же успехом применяемые для расчета оболочек и других тонкостенных конструкций.
В зависимости от подходов к решению задач можно выделить
основные классификации приближенных методов.
По типу разрешающих уравнений приближенные методы
можно разделить на две группы. Первую составляют так называемые
методы решения краевых задач для дифференциальных уравнений. Из числа этих методов здесь будут рассмотрены метод конечных разностей (МКР) и метод Бубнова – Галеркина (МБГ). Вторую
группу составляют прямые вариационные методы, основанные на
вариационных принципах механики, прежде всего на принципе
минимума потенциальной энергии (Лагранжа) и принципе минимума дополнительной работы (Кастильяно). К этим методам, в частности, относится метод Ритца – Тимошенко (МРТ), вариационноразностный метод (ВРМ), а также наиболее распространенный в
настоящее время метод конечных элементов (МКЭ).
По схеме построения приближенного решения задачи различают разностные и проекционные методы. В разностных методах
исходное уравнение представляется в конечно-разностной форме
(МКР, ВРМ), а в проекционных заменяется приближенным конечномерным уравнением, решение которого ищется при помощи так
называемых координатных (базисных) функций (МБГ, МРТ, МКЭ)
И, наконец, по виду представления искомого решения приближенные методы разделяются на численно-аналитические
(полуаналитические) и численные (сеточные). В первых из них
38
решение задачи ищется в аналитической форме с подлежащими определению числовыми значениями неизвестных коэффициентов
(МБГ, МРТ). В сеточных методах (МКР, ВРМ, МКЭ) решение
ищется в виде числовых значений искомой функции в некоторой
дискретной совокупности точек (узлах сетки).
Кроме того, приближенные методы могут реализовываться
как в форме метода перемещений (основными неизвестными
здесь являются перемещения – в виде искомых функций или числовых значения в узлах сетки), так и в форме метода сил (основными неизвестными являются усилия или напряжения). При расчете
сложных тонкостенных конструкций, в частности оболочек, нередко приближенное решение ищется в смешанной форме (основными неизвестными здесь являются и перемещения, и усилия).
2.1. Расчет пластин методом конечных разностей
Метод конечных разностей, или, как его еще называют, метод сеток, является одним из достаточно эффективных численных
методов решения краевых задач для дифференциальных уравнений.
Согласно этому методу вся область решения краевой задачи (срединная плоскость пластины, поверхность оболочки и т. п.) покрывается сеткой линий, точки пересечения которых называются узлами. За неизвестные в задаче принимаются числовые значения
искомой функции в узлах сетки (узловые неизвестные). При этом
производные, входящие в дифференциальное уравнение, заменяются приближенными выражениями в виде конечно-разностных отношений между соответствующими узловыми неизвестными (конечно-разностными операторами производных). Подставив эти
конечные разности в дифференциальное уравнение (получив, тем
самым, конечно-разностный оператор дифференциального уравнения), требуем его выполнения в каждом узле сетки.
Граничные условия краевой задачи также записывают через
конечно-разностные операторы, связывая в свою очередь разностными отношениями неизвестные в приграничных узлах сетки. В
конечном счете задача решения дифференциального уравнения при
выполнении граничных условий сводится к решению системы линейных алгебраических уравнений относительно узловых значений
искомой функции. Определив основные неизвестные, далее через
конечные разности определяют усилия и напряжения.
39
2.1.1. Конечно-разностный оператор дифференциального
уравнения изгиба
Рассмотрим построение конечно-разностных операторов (КРО)
для частных производных от функции прогибов пластины w (x, y).
На рассматриваемую область наложим сетку узлов с равными интервалами ∆x и ∆y соответственно по осям x и y (рис. 2.1). Таким
образом, с математической точки зрения мы переходим от непрерывной области к дискретной конечно-разностной сетке. На этой
сетке будем строить конечно-разностные выражения для производных и других членов, входящих в дифференциальное уравнение.
∆x
∆x
x
w
y
l
b
h
a
k
c
f
d
e
∆y
∆y
i
g
y
–1
2w
2x
–1
–2
1
1
k
–2
1
1
k
1
x
1
y
1
w
x y
1
1
2y
–1
2
1
2x
k
1
m
n
w
x
k
2w
2y
k
–1
1
4 x y
1
Рис. 2.1. Конечно-разностная сетка и операторные схемы
В предположении малости размеров шагов сетки ∆x и ∆y (хотя
это не совсем так) запишем первые производные от функции w для
узла k в конечно-разностной форме (при ∆x = const, ∆y = const):
w
x
40
k
wc wa
;
2 x
w
y
k
wd wb
.
2 y
(2.1)
Полученные операторы производных в схематичном виде
изображены на рис. 2.1 под сеткой узлов и сбоку. Они симметричны относительно узла k, поэтому соответствующие им выражения
называются центральными конечными разностями.
Правые и левые конечные разности для узла k запишутся так:
w
x
пр
k
w wk w
c
;
x
y
пр
k
w wk w
d
;
y
x
лев
k
w wa w
k
;
x
y
лев
k
wk wb
.
y
Вторые производные от функции w в узле k можно получить, применяя операторы первой производной к первым же производным:
2w
x 2
2w
y2
пр
k
1 w
x x
пр
k
1 w
y y
2w
x y
k
k
k
w
x
w
y
лев
k
лев
k
1 w
w
2 y x d x
w 2w w
k
c
a
;
2
x
w 2w w
k
d
b
;
2
y
(2.2)
we w f wg wh
.
4
x y
b
Соответствующие операторные схемы также приведены на рис. 2.1.
Складывая вторые производные, получим конечно-разностные
выражения для гармонического оператора Лапласа в узле k:
wa wb 2 (1 ) wk wc wd
2w
2w
wk
x2 k y2 k
2x
2
или
(2.3)
wa wb 2 (1 ) wk wc wd
2w
2w
wk
, (2.4)
x2 k y2 k
2y
2
2x
1 y
где 2 ; 2 .
y
x
2
Бигармонический оператор Лапласа 4 w для узла k можно
получить, дважды применив гармонический оператор 2 w , записанный в виде (2.3) и (2.4). Сначала, используя выражение (2.3),
представим оператор 4 w в следующем виде:
41
4w 2 2w
k
k
2 w 2 w 2(1 ) 2 w 2 w 2 w
a
b
k
c
d
x
2
.
Последовательно подставив сюда гармонические операторы
2 w , j a, b, k , c, d , выраженные с помощью (2.4), и приведя
j
подобные члены, получим
4w
k
wk (8 6 6) 4wa (1 ) 4wb (1 ) 4wc (1 )
2x 2y
4wd (1 ) 2we 2w f 2wg 2wh wi wl wm wn
x y
2
2
(2.5)
.
Разностная схема бигармонического оператора Лапласа изображена на рис. 2.2, а. В том случае, если используется квадратная сетка (∆x = ∆y = ∆, μ = η = 1), оператор (2.5) принимает вид (рис. 2.2, б)
4w
20wk 8 ( wa wb wc wd ) 2 ( we w f wg wh ) wi wl wm wn
4
k
а)
4
μ
k
η
2
–4(1+μ)
2
–4(1+η)
8+6(μ+η)
–4(1+η)
2
–4(1+μ)
2
∆x
μ
б)
4
η
∆y
1
k
1
2
–8
2
–8
20
–8
2
–8
2
1
1
∆
1
4
∆
Рис. 2.2. Бигармонический оператор Лапласа
42
1
x 2y
2
.
Некоторые, однако, вполне разрешимые сложности представляет построение бигармонического оператора в случае неравномерного шага сетки (∆x ≠ const, ∆y ≠ const), а также для косоугольной или полярной системы координат [1, 14].
В конечном счете, конечно-разностный оператор дифференциального уравнения изгиба пластины для произвольного узла k
запишется в виде
q
(2.6)
4 w k , k 1, ... , N ,
k
D
где N – общее число внутренних узлов сетки; qk – средняя интенсивность нагрузки, приходящейся на площадку ∆x×∆y, примыкающую к узлу k. Если в узле k приложена сосредоточенная сила Fk,
то она учитывается в виде дополнительной нагрузки qk Fk ( x y ) .
Оператор дифференциального уравнения для пластины, лежащей на упругом винклеровском основании (при действии распределенной нагрузки и сосредоточенных сил) запишется так:
4w
k
ky
D
wk
Fk
1
qk
, k 1, ... , N .
D
x y
(2.7)
Накладывая последовательно оператор (2.6) или (2.7) на все
узлы сетки, в которых определяются прогибы, получим систему
линейных алгебраических уравнений относительно узловых неизвестных wk. Однако при составлении уравнений для узлов, лежащих вблизи контура пластины, в них войдут неизвестные прогибы
и в законтурных узлах сетки. Поэтому для решения системы уравнений необходимо учесть граничные условия на краях пластины,
также записанные через конечные разности.
2.1.2. Учет граничных условий
Рассмотрим характерные случаи граничных условий, например для правого края прямоугольной пластины x = a.
Заделанный край (рис. 2.3, а). В этом случае для узла k на
контуре пластины в соответствии с (1.22) и (2.1) имеем:
wk 0;
w wa
w
c
0, отсюда wc wa .
x k
2 x
(2.8)
43
а)
б)
x=a
x=a
x
x
a
k
c
∆x
a
k
∆x
∆x
y
c
∆x
y
wa
1
–1
1
в)
wc
wa
wc
1
x=a
x
g
i
h
a
k
μν
c
–1
e
2 + 2μν
–1
μν
∆y
f
m
∆x
∆x
y
г)
wi
wa
wk
2–ν
η
η(2ν–6)
2–ν
μ
wc
wm
ν– 2
0
η(6–2ν) –ην
ν– 2
2 – ν μ(2ν–6) 2 – ν
0
ν – 2 μ(6–2ν) ν – 2
–μν
Рис. 2.3. Конечно-разностные операторы граничных условий
Шарнирно опертый край (рис. 2.3, б). В соответствии с (1.23)
и (2.2) для узла k имеем:
wk 0;
44
wa 2wk wc
2w
0 , отсюда wc wa .
x 2 k
2x
(2.9)
Таким образом, для заделанного и шарнирно-опертого края
пластины узловые неизвестные на контуре в законтурных узлах
можно исключить с помощью равенств (2.8) и (2.9).
Свободный край (рис. 2.3, в). На этом участке контура для узла k в соответствии с (1.28) имеем
2w
2w
2 0;
x 2
y k
2w
2w
(2 ) 2 0 .
x x 2
y k
(2.10)
Используя конечно-разностные выражения (2.2) и применив оператор первой производной (2.1) ко вторым производным, после приведения подобных членов и исключения величин ∆x и ∆y получим
2 (1 ) wk ( wa wc ) ( wb wd ) 0 ;
2 (3 ) ( wc wa ) (2 )( we w f wg wh ) wi wm 0 .
(2.11)
Соответствующие схемы операторов для граничных условий
(2.8), (2.9) и (2.11) изображены на рис. 2.3. Аналогично составляются конечно-разностные операторы для левого края пластины x = 0;
в этом случае приведенные операторные схемы развернутся на 180
градусов. Для верхнего и нижнего края соответствующие операторы развернутся на 90 градусов, кроме того в операторах для свободного края коэффициенты μ и η поменяются местами (рис. 2.3, г).
Как видим, в случае свободного края в расчет вводятся два
слоя вспомогательных законтурных узлов – столько же слоев,
сколько и при наложении оператора (2.6) на узлы незакрепленного
контура пластины. При этом каждому такому узлу на контуре отвечают два уравнения (2.11). В результате общее число дополнительных законтурных неизвестных будет равно общему числу дополнительных уравнений, выражающих граничные условия для всех
узлов на свободном крае пластины.
Эти дополнительные уравнения, составленные с помощью равенств (2.11), добавляются к уравнениям (2.6), выражающим дифференциальное уравнение изгиба пластины. В результате имеем
полную разрешающую систему линейных алгебраических уравнений, из решения которой находятся величины прогибов во всех узлах сетки, включая законтурные. Значения w в законтурных узлах в
дальнейшем используются при вычислении внутренних усилий в
узловых точках на контуре пластины.
45
2.1.3. Вычисление внутренних усилий и напряжений
После определения прогибов во всех узлах сетки, наложенной
на пластину, с помощью соответствующих конечно-разностных
операторов вычисляем значения изгибающих и крутящего моментов в этих узлах. Подставив в формулы (1.16) выражения вторых
производных (2.2) и приведя подобные члены, получим
Mx
k
D
2 (1 ) wk wa wс (wb wd );
2x
D
2 (1 ) wk wb wd ( wa wc );
2y
My
k
H
k
(2.12)
D (1 )
we w f wg wh .
4 x y
Схемы операторов для вычисления моментов приведены на рис. 2.4.
Mx
–μν
–1
k
My
–1
–1
2(1+μν)
–ην
D
2
x
∆x
–μν
∆y
k
2(1+ην)
–1
0
k
–1
D
2y
–1
1
H
–ην
∆y
∆x
D (1 )
4 x y
1
Рис. 2.4. Операторы внутренних усилий
Наибольшие значения напряжений, действующих на нижней и
верхней поверхностях пластины, определяем по формулам
x
46
6M y
6M x
6H
;
;
.
y
h2
h2
h2
(2.13)
2.1.4. Пример расчета изгибаемой пластины МКР
Рассмотрим пример расчета железобетонной плиты размерами a = 8 м, b = 6 м и толщиной h = 0,2 м, нагруженной равномерно
распределенной нагрузкой интенсивностью q = 30 кН/м2 и двумя сосредоточенными силами F = 120 кН. Края плиты, параллельные оси x –
шарнирно оперты, параллельные оси y – заделаны (рис. 2.5, а). Требуется определить прогибы в узлах наложенной на плиту сетки 4×4,
построить эпюры прогибов w и изгибающих моментов M x и M y
для средних сечений плиты (при x = a/2 и y = b/2), эпюру крутящих моментов H для граничного сечения y = 0.
а)
б)
2
P
O
P
S
2
1
2
3
T
3
4
3
2
S
2
1
2
1,771
2
–11,11
2
0,563 –6,25 22,04 –6,25 0,563
∆y
2
x
R
b/2 = 3 м
R
1
b/2 = 3 м
2
2
–11,11
2
1,771
a/2 = 4 м
a/2 = 4 м
y
F
∆x
q
∆x
F
∆x
∆x
Рис. 2.5. Конечно-разностная сетка для расчета плиты
Учитывая симметрию пластины с закреплениями и приложенной нагрузкой относительно осей x = a/2 и y = b/2, нумерацию узлов сетки выполним также симметрично относительно этих осей.
Величины шагов сетки ∆x = a/4 = 2 м; ∆y = b/4 = 1,5 м, тогда коэффициенты 2x 2y 1,778; 1 0,553.
47
Перенесем знаменатель 2x 2y из левой – в правую часть дифференциального уравнения изгиба (2.6) и, подставив в бигармонический оператор Лапласа (см. рис. 2.2, а) коэффициенты μ, η и ν,
запишем этот оператор в числовом виде (рис. 2.5, б).
Примем для железобетона: E = 3,2 ∙ 104 МПа = 3,2 ∙ 107 кН/м2,
ν = 0,15, тогда цилиндрическая жесткость плиты:
E h3
3,2 107 0,23
D
21,82 103 кН м .
2
2
12 (1 ) 12 (1 0,15 )
Подсчитаем величины, входящие теперь в правую часть уравнений (2.6):
q 2x 2y
D
F 2x 2y 120 2 1,5
30 2 2 1,52
3
12,37 10 м ;
16,5 103 м .
3
3
D x y 21,82 10
21,82 10
Запишем равенства, вытекающие из граничных условий рассматриваемой плиты. Во всех узлах на контуре плиты значения
прогибов равны нулю. Для законтурных узлов вдоль шарнирно
опертых сторон w1 = –w1; w2 = –w2, вдоль защемленных сторон w2
= w2, w3 = w3.
Используя оператор в виде (рис. 2.5, б), с учетом приведенных
выше равенств составляем уравнения (2.6) для внутренних узлов
сетки 1, 2, 3, 4.
Узел 1: 22,04 ∙ w1 – 6,25 (w2 + w2) – 11,11 ∙ w4 + 2 (w3 + w3) +
+ 1,78 (w1 – w1) = 12,37 ∙ 10–3.
Узел 2: 22,04 ∙ w2 – 6,25 ∙ w1 – 11,11 ∙ w3 + 2 ∙ w4 + 0,563 (w2 + w2) +
+ 1,78 (w2 – w2) = 12,37 ∙ 10–3.
Узел 3: 22,04 ∙ w3 – 6,25 ∙ w4 – 11,11 (w2 + w2) + 2 (w1 + w1) +
+ 0,563 (w3 + w3) = (12,37 ∙ 10–3 + 16,5 ∙ 10–3) = 28,87 ∙ 10–3.
Узел 4: 22,04 ∙ w4 – 6,25 (w3 + w3) – 11,11 (w1 + w1) + 2 (w2 +
+ w2 + w2 + w2) = 12,37 ∙ 10–3.
После преобразований получим следующую систему линейных алгебраических уравнений:
22,04 ∙ w1 – 12,5 ∙ w2 + 4 ∙ w3 – 11,11 ∙ w4 = 12,37 ∙ 10–3 ;
–6,25 ∙ w1 + 23,17 ∙ w2 – 11,11 ∙ w3 + 2 ∙ w4 = 12,37 ∙ 10–3 ;
48
4 ∙ w1 – 22,22 ∙ w2 + 23,17 ∙ w3 – 6,25 ∙ w4 = 28,87 ∙ 10–3 ;
– 22,22 ∙ w1 + 8 ∙ w2 – 12,5 ∙ w3 + 22,04 ∙ w4 = 12,37 ∙ 10–3 .
В матричной форме система уравнений имеет вид
12 ,5
4 ,0
11,11 w1 12 ,37
22 ,04
6 ,25
23 ,17 11,11 2 ,0 w2 12 ,37 3
10 .
4 ,0
22 ,22 23 ,17 6 ,25 w3 28 ,87
8 ,0
12 ,5 22 ,04 w4 12 ,37
22 ,22
Заметим, что матрицу коэффициентов можно сделать симметричной относительно главной диагонали, если второе уравнение
умножить на 2, а четвертое – разделить на 2.
Решив систему уравнений, получим вектор узловых перемещений рассматриваемой плиты
w1 8 ,04
8 ,04
w 5 ,79
5 ,79
2
3
10 м
мм .
w
8
,
48
8
,
48
3
w4 11,37
11,37
Числовое поле прогибов w в узлах сетки представлено на рис.
2.6, а. Поверхность изогнутой плиты изображена на рис. 2.6, б.
а)
б)
x
0
0
0
0
0
0
5,79
8,04
5,79 0
0
8,48
11,37
8,48 0
5,8
y
0
5,79
8,04
5,79 0
0
0
0
0
8,5
5,8
8,0
5,8
8,5
5,8
8,0 11,4
0
w, мм
Рис. 2.6. Значения прогибов в узлах сетки
49
С помощью конечно-разностных операторов внутренних усилий (2.12), (рис. 2.4) определяются изгибающие и крутящие моменты в узлах по сечениям плиты.
Вычислим значения множителей в этих операторах:
D 21,82 103
D 21,82 103
3
5,46 10 кН/м ; 2
9,7 103 кН/м ;
2
2
2
x
2
y
1,5
D (1 ) 21,82 103 (1 0,15)
1,55 103 кН/м ,
4 x y
4 2 1,5
и запишем операторы (см. рис. 2.4) в числовом виде (рис. 2.7).
Mx
–0,267
My
k
–1
–1
2,533
–1
k
–0,084
×5,46∙103
–0,267
–1
×9,7∙103
×1,55∙103
0
k
–0,084
–1
1
H
2,169
∆y
–1
∆x
1
Рис. 2.7. Операторы для вычисления моментов
Последовательно накладываем эти операторы на узлы сетки
для сечений, в которых требуется определить внутренние усилия.
Приведем вычисление изгибающих моментов Mx, My в узле 1 и крутящего момента H в узлах O, P и P’ (см. рис. 2.5, а).
Mx1 = 5,46 ∙ 103 (2,533 ∙ w1 – 1 (w2 + w2) – 0,267 (wO + w4) =
= 5,46 ∙ 103 (2,533 ∙ 8,04 – 1 ∙ 2 ∙ 5,79 – 0,267 ∙ 11,37) = 31,4 кН∙м/м.
My1 = 9,7 ∙ 103 (2,169 ∙ w1 – 0,084 (w2 + w2) – 1 (wO + w4) =
= 9,7∙103 (2,169 ∙ 8,04 – 0,084 ∙ 2 ∙ 5,79 – 1 ∙ 11,37) = 49,4 кН∙м/м.
HO = 1,55 ∙ 103 (w2 – w2 + w2 – w2) = 0.
50
HP = 1,55 ∙ 103 (w1 – wS – w1) = 1,55 (8,04 + 8,04) = 24,9 кН∙м/м.
HP = 1,55 ∙ 103 (wS – w1 + w1) = 1,55 ∙ 2 (–8,04) = –24,9 кН∙м/м.
Аналогично вычисляются изгибающие и крутящие моменты в
остальных узлах сетки. Числовые поля внутренних усилий Mx, My, H
представлены на рис. 2.8.
Mx, кН∙м/м
My, кН∙м/м
0
0
0
0
0
–63,1
23,8
31,4
23,8
–92,5
38,3
41,3
–63,1
23,8
0
0
0
0
0
–63,1
–9,5
32,9
49,3
32,9
–9,5
38,3
–92,5
–13,9
56,7
69,4
56,7
–13,9
31,4
23,8
–63,1
–9,5
32,9
49,3
32,9
–9,5
0
0
0
0
0
0
0
y
0
x
0
x
0
y
H, кН∙м/м
8,9
24,8
–24,8
0
–8,9
0
17,6
0
–17,6
0
0
17,6
0
–17,6
0
0
–17,6
17,6
0
–8,9
–24,8
24,8
8,9
0
0
x
y
Рис. 2.8. Значения внутренних усилий в узлах сетки
Значения опорных реакций в узлах по закрепленным сторонам
плиты можно найти, воспользовавшись уравнением (2.7) в виде
4 w k (qk Vk / x y ) D , отсюда Vk ( D 4 w k q) x y . Тогда
распределение реакций по краям, параллельным осям x и y:
Vy
k
Vk x ( D 4 w k qk ) y ; Vx
k
Vk y ( D 4 w k qk ) x .
51
Последовательно накладывая оператор (рис. 2.5, б) на узлы O,
P, R, вычисляем распределение опорной реакции Vy по верхнему
шарнирно-опертому краю плиты. С учетом граничных условий на
этом крае (w1 = –w1; w2 = –w2) получаем 4 w O , P , R 0 , тогда:
VyO = VyP = (0 – q/2) ∙ ∆y = –15 ∙ 1,5 = –22,5 кН/м;
VyR = (0 – q/4) ∙ ∆y = –7,5 ∙ 1,5 = –11,25 кН/м.
Знак минус говорит о том, что эта реакция, как внешняя для плиты
сила, направлена против оси z, т. е. вверх.
Результаты расчета, а именно эпюры прогибов и изгибающих
моментов Mx, My для средних сечений плиты, эпюра крутящих
моментов H в сечении по верхней шарнирно-опертой кромке
плиты, а также распределение опорных реакций V y по этому
краю приводятся на рис. 2.9.
Обратим внимание на то, что если эпюры прогибов, реакций и изгибающих моментов для симметрично нагруженной
плиты являются симметричными относительно осей симметрии, то эпюры крутящих моментов кососимметричны.
R
F
S
T
S
P
O
2
2
F
1
3
4
1
x
R
2
b/2
3
2
a/2
y
P
b/2
a/2
8,0
a/2
8,5
92,5
0
8,5
11,4
31,4
11,4
w, мм
0
31,4
41,3
8,0
Mx, кН∙м/м
w, мм
92,5
Mx, кН∙м/м
38,3
41,3
38,3
13,9
13,9
56,8
8,5
My, кН∙м/м
56,8
69,4
24,8
0
H, кН∙м/м
24,8
8,5
Vy, кН/м
11,25
11,25
22,5
22,5
Рис. 2.9. Результаты расчета плиты
52
49,3
69,4
49,3
My, кН∙м/м
2.2. Метод Бубнова – Галеркина
2.2.1. Основные положения метода Бубнова – Галеркина
Метод Бубнова – Галеркина (МБГ) относится к численноаналитическим проекционным методам решения краевых задач для
дифференциальных уравнений. Этот метод был предложен в 1913 г.
И. Г. Бубновым и независимо от него в 1915 г. Б. Г. Галеркиным.
В основе метода лежит понятие ортогональности функций.
Две функции f (x) и (x) называются ортогональными в интервале l1 х l2 (аналогично и в какой-либо многомерной области), если выполняется условие
l2
f ( x) ( x) dx 0.
l1
Если одна из функций, например f (x) , тождественно равна
нулю, то она будет ортогональна к любой функции i (x) . Например, функция f ( x) EIwIV q, являющаяся левой частью дифференциального уравнения изогнутой оси балки длиной l, тождественно равна нулю при всех значениях х, поэтому
( EIw
IV
q) i ( x) dx 0.
l
Если функцию прогибов w (x) приближенно искать в виде лиN
нейной комбинации wN i i ( x) , то выражение ( EIwNIV q) уже
i 1
не будет тождественно равно нулю, следовательно, не будет ортогонально любой функции. Тогда потребуем, чтобы оно было ортогонально по крайней мере к каждой из функций i (x) , составляющих wN , т. е. чтобы выполнялись условия
( EIwN q) i ( x) dx 0,
IV
i 1, 2, ... , N .
l
Таким образом, получим систему N линейных алгебраических
уравнений для определения N коэффициентов i , входящих в приближенное решение wN .
53
Функции i (x) называются базисными или координатными
функциями. Они должны быть заданы таким образом, чтобы удовлетворять условиям на границах области. Кроме того система базисных функций i ( x), i 1, 2, ... , N должна быть линейно независимой, т. е. ни одну из функций i (x) нельзя выразить линейной
комбинацией других функций этой же системы.
Приведенные рассуждения применимы и к функциям двух (и
более) переменных. Условие ортогональности функций f ( x, y) и
( x, y) в двумерной области Ω запишется так:
f ( x, у) ( x, y) dx dy
0.
Представим дифференциальное уравнение изгиба пластины
в следующем виде:
q
(2.14)
L( w)
0.
D
Здесь символом L обозначен дифференциальный оператор уравнения изгиба, т. е. L( w) 4 w .
Будем искать приближенное решение уравнения (2.14) в виде
N
wN j j ( x, y ) ,
(2.15)
j 1
где j − неизвестные коэффициенты, подлежащие определению;
j ( x, y ) − линейно независимые базисные функции, выбранные таким образом, чтобы аппроксимировать предполагаемые перемещения в направлении оси z и удовлетворять всем (кинематическим и
статическим) граничным условиям на контуре пластины [1].
Подставив (2.15) в уравнение (2.14), получим
N
[ j L ( j ) ]
j 1
q
0.
D
(2.16)
Потребуем, чтобы левая часть дифференциального уравнения
(2.16) была ортогональна каждой из базисных функций ряда
i ( x), i 1, 2, ... , N . Эти условия для прямоугольной пластины размерами a×b (0 х a, 0 y b) приводят к следующей системе
54
линейных алгебраических уравнений относительно искомых неизвестных j :
N
ab
1
[
L
(
)
dx
dy
]
j j i
D
j 1
00
ab
q ( x, y) i dx dy
0,
00
(2.17)
i 1, 2, ... , N .
Каждое i-е уравнение этой системы можно представить в виде
N
Ai j j
j 1
Bi или Ai1 1 Ai 2 2 ... Ai N N Bi ,
где коэффициенты при неизвестных j и свободные члены
ab
Ai j i L( j ) dx dy ;
00
1
Bi
D
ab
i q ( x, y) dx dy .
00
Если на пластину помимо распределенной нагрузки действует
система сосредоточенных сил Fk , k 1, 2, ... , nF , то
Bi Bi q Bi F
1
D
ab
1
q
(
x
,
y
)
(
x
,
y
)
dx
dy
i
D
00
nF
Fk i ( xk , yk ) .
k 1
В результате решения системы уравнений находим значения
коэффициентов j и тем самым приближенную функцию прогибов
wN ( x, y) . Если дифференциальное уравнение (2.14) нелинейное, то
и система уравнений относительно j будет также нелинейной.
В случае, если для задания приближенного решения используется одна базисной функции, т. е. w ( x, y) , то искомый коэффициент B A , где
ab
A L() dx dy ;
00
1
B
D
ab
1
q
(
x
,
y
)
dx
dy
D
00
nF
Fk ( xk , yk ) .
k 1
Хотя описание метода Бубнова – Галеркина приведено для
одно и двумерной области решения задач, он, естественно, применим и для трехмерных задач. Этот метод применим также и к системам дифференциальных уравнений.
55
В этой связи следует упомянуть о методах, родственных МБГ.
Это обобщенный метод Бубнова – Галеркина, метод Петрова – Галеркина, метод Канторовича – Власова, методы коллокаций в различных видах (внутренней, граничной, комбинированной коллокации), метод наименьших квадратов и т. д.
Так, в методе Петрова – Галеркина приближенное решение
задается через одну систему базисных функций, а условия ортогональности записываются по отношению к другой базисной системе.
Если две эти системы связаны между собой посредством линейного
оператора, то данный метод называется методом моментов.
В методах коллокаций неизвестные коэффициенты j в разложении приближенного решения (2.15) ищутся из условий, чтобы
это приближение удовлетворяло дифференциальному уравнению
(2.14) в заданных точках k (xk, yk), называемых узлами коллокации,
при этом сходимость метода зависит от выбора этих узлов.
Суть метода наименьших квадратов заключается в нахождении искомых коэффициентов j из условия минимизации (в заданных точках k) невязки решения уравнения (2.16) в форме наименьших квадратов:
2
N
q
( ) [ j L ( j ) ]
min ,
D
k 1 j 1
где nk – число точек коллокации (nk ≥ N).
Метод Канторовича – Власова позволяет свести двумерную
(а в общем случае и трехмерную) краевую задачу для дифференциальных уравнений в частных производных к краевой задаче для
системы обыкновенных дифференциальных уравнений. Для решения таких систем в современной вычислительной математике существует достаточно эффективных методов.
Имеются и другие методы, в которых задача более высокой
размерности сводится к задаче меньшей размерности, правда, как
правило, за счет увеличения числа дифференциальных уравнений.
Трудности в применении МБГ и других проекционных полуаналитических методов, в основном, связаны с подбором базисных
функций i , так как последние должны удовлетворять не только
всем кинематическим, но и (по возможности) статическим граничным условиям.
nk
56
2.2.2. Базисные функции
Базисные функции, как уже говорилось, должны представлять
собой предполагаемые прогибы пластины и удовлетворять краевым
условиям задачи. В качестве базисных функций обычно применяются тригонометрические и степенные функции.
Для прямоугольной пластины размерами a×b выбор базисных
функций упрощается тем, что они могут быть заданы в виде произведения двух функций от одного аргумента:
( x, y) 1 ( x) 2 (y) ,
где 1 ( x) должна удовлетворять граничным условиям на краях, параллельным оси y (при х = 0, a); 2 ( y ) − граничным условиям на
краях, параллельным оси х (при y = 0; b).
Рассмотрим пластину (рис. 2.10), защемленную по сторонам,
параллельных оси y (в этом случае заданы только кинематические
граничные условия) и шарнирно опертую по сторонам, параллельных оси x (смешанные граничные условия). Подберем для нее базисные функции, удовлетворяющие в первую очередь кинематическим и, по возможности, статическим граничным условиям.
w (0) = 0
w (0) = 0
x
0
b
w (b) = 0
w (b) = 0
a
y
y
x
w (0) = 0
w (0) = 0
w (a) = 0
w (a) = 0
Рис. 2.10. Прямоугольная пластина с граничными условиями
Подберем сначала функцию 1 ( x) , удовлетворяющую защемлению по краям х = 0, a. Здесь подойдет, например, тригонометрическая функция вида
57
x
1 ( x) 1 cos 2m ;
a
1 ( x)
2m
x
sin 2m ,
a
a
где m – целое положительное число. Действительно, подставив в
эту функцию и ее производную значения х = 0 и х = a, получим:
1 (0) 1 cos 0 (1 1) 0 ;
2m
sin 0 0 ;
a
2m
1 (a)
sin 2m 0 .
a
1 (0)
1 (a) 1 cos 2m (1 1) 0 ;
Теперь подберем функцию 2 ( y ) , удовлетворяющую шарнирному опиранию по краям y = 0; b. В этом случае наиболее подходящей является функция синуса
y
2 ( y ) sin m ;
b
m 2 2
y
2 ( y ) 2 sin m .
b
b
Проверим выполнение граничных условий при y = 0; b:
m
m 2 2
2 (0) sin 0 0 ; 2 (0)
cos 0 0 ; 2 (0) 2 sin 0 0 ;
b
b
m
m 2 2
2 (b) sin m 0 ; 2 (b)
cos m 0 ; 2 (b) 2 sin m 0 .
b
b
В итоге базисная функция тригонометрического вида для
приведенных граничных условий будет иметь вид
x
y
( x, y ) 1 cos 2m sin m .
a
b
В свою очередь приближенная функция прогибов пластины
w ( x, y) , при конечном числе членов в разложении (2.15) может быть
задана следующим образом:
w ( x, y )
N
N
m m ( x, y) m 1 cos 2m
m 1
m 1
x
y
sin m .
a
b
Например, при двух членах суммы в разложении
x
y
x
y
w ( x, y ) 1 cos 2 sin
1 cos 4 sin 2 .
a
b
a
b
58
Аналогично подберем базисную функцию степенного (полиномиального) вида. Для 1 ( x) зададимся следующим полиномом:
1 ( x) x 2 (a x) 2 ;
1 ( x) 2a 2 x 6ax 2 4 x3 .
Проверим выполнение граничных условий при х = 0; a:
1 (0) 0 (a 0) 2 0 ;
1 (0) 0 0 0 0 ;
1 (a) a 2 (a a) 2 0 ; 1 (a) 2a 3 6a 3 4a 3 0.
В качестве функции 2 ( y ) примем полином:
2 ( y) y (b 2 y 2 ) ;
2 ( y) 6 y .
Проверим выполнение граничных условий при y = 0; b:
2 (0) 0 (b 2 0 2 ) 0 ; 2 (0) b 2 0;
2 (b) b (b 2 b 2 ) 0 ;
2 (0) 0 ;
2 (b) 2b 2 0; 2 (b) 6b 0 .
В данном случае базисная функция ( x, y) 1 ( x) 2 ( y) будет
удовлетворять обоим кинематическим граничным условиям и одному (из двух) статическому. Это допустимо, так как при расчете
пластины на изгиб выполнение кинематических условий является
обязательным, а статических – необязательным (однако желательным для получения более точных результатов).
Полученная степенная базисная функция будет иметь вид:
( x, y) x 2 (a x) 2 y (b 2 y 2 ) .
Очевидно, что при взаимной замене условий закрепления по краям
пластины следует поменять местами величины (х, a) и (y, b).
Таким же образом могут быть получены базисные функции и
для других случаев закрепления краев прямоугольной пластины.
Некоторые тригонометрические и степенные функции 1 ( x) для
различных случаев закрепления краев, параллельных оси y (т. е.
при х = 0; a) приведены в табл. 2.1. Величина m – целое положительное число (m = 1, 2, 3, … , ∞).
Как можно видеть, приведенные в таблице функции удовлетворяют всем кинематическим и по большей части статическим
граничным условиям. Для краев пластины, параллельных оси х
(при y = 0; b) вместо 1 ( x) принимается 2 ( y ) , а величины (х, a)
заменяются на (y, b).
59
Таблица 2.1
Основные базисные функции для прямоугольной пластины
Тип закрепление краев
Заделка –
заделка
(З – З)
Заделка –
опирание
(З – О)
Опирание –
заделка
(О – З)
Опирание –
опирание
(О – О)
Заделка –
своб. край
(З – С)
Опирание –
своб. край
(О – С)
Схема
закрепления
Тригонометрическая функция
0
x
0
x
0
x
0
x
sin m
0
x
1 cos
0
x
1 cos 2m
1
Степенная
базисная функция
x
a
x 2 ( a x) 2
x
3x
cos
a
2a
x 2 (a x)
3x
x
2a
a
x ( a x) 2
sin
sin
x
a
x (a 2 x 2 )
x
2a
x2
x
2a
x ( 4a 2 x 2 )
2.2.3. Пример расчета прямоугольной пластины
Выполним расчет рассмотренной ранее (п. 2.1.4) прямоугольной плиты размерами 8×6 м, толщиной h = 0,2 м (рис. 2.11).
Функцию прогибов плиты зададим в таком виде:
w ( x, y) 1 ( x) 2 ( y) ,
где за 1 ( x) , 2 ( y ) примем следующие тригонометрические функции
2x
1 ( x) 1 cos
;
a
2 ( y ) sin
y
.
b
Представление базисной функции φ (x, y) в виде произведения двух
функций одного аргумента существенно упростит решение задачи.
60
b/2 = 3 м
b/2 = 3 м
x
a/2 = 4 м
a/2 = 4 м
y
F = 120 кН
3м
q = 30 кН/м2
3м
F = 120 кН
3м
3м
Рис. 2.11. Схема прямоугольной плиты
Неизвестный коэффициент B A , где
ab
1
A L() dx dy ; B Bq BF
D
00
ab
F
q
dx
dy
D
00
2
( xk , yk ) .
k 1
Находим дифференциальный оператор L(φ):
4
4
4
L() 4 2 2 2 4 1IV 2 21 2 1 IV2
x y
y
x
4
4
2x
y 8 4
2x
y
2x
y
2
cos
sin
2 2 cos
sin
1 cos
sin .
a
b ab
a
b b
a
b
a
4
Определяем величину A:
A
ab
00
2 4
2x
2x 2 y
1 cos
sin
cos
a
a
a
b
8 4
2x
2x 2 y
2 2 cos
dx dy .
1 cos
sin
a
a
b
a
b
4
2
2
x
y
2
1 cos
sin
b
a
b
61
Вычисляем интегралы:
2x
a
2x
cos a dx 2 sin a
0
a
a
0;
0
2x
a 2x 1
4x
cos a dx 2 2a 4 sin a
0
a
a
2
b
b
2
sin
0
0
a
;
2
y
b y 1
2y
b
dy sin
.
b
2b 4
b 0 2
После приведения подобных членов получим:
84 ab
a b 4 16
8
3
2 ab
A
2 2
a
ab 4 2 2 4 .
ab 4
2 2
4
ab
b
a 4
b
a
4
4
При заданных значения a = 8 м, b = 6 м вычисляем A = 11,33 (1/м2).
Определяем величину Bq :
q
Bq
D
2x
y
q a
2x b
y
1 cos a sin b dx dy D 1 cos a dx sin b dy.
00
0
0
ab
Интегрируя, находим:
2x
a
a
2x
1
cos
dx
x
sin
a
2
2
a
0
a
y
b
y
sin
dy
cos
b
b
0
b
b
0
a
a;
0
2b
.
Подставив интегралы, получим:
a b
3a b
,
,
4 2
4 2
F
3
2F
1
cos
sin
1
cos
sin
.
D
2
2
2
2
D
BF
F
D
При заданных значения a, b, F и D = 21,82 ∙ 103 кН∙м вычисляем:
B Bq BF
62
q 2b 2 F
a
0,042 0,011 0,053 (1 / м) .
D
D
Находим значение коэффициента :
B A 0,053 11,33 4 ,678 103 (м) .
Таким образом, функция прогибов срединной поверхности
x
y
w ( x, y ) 4 ,678 103 1 cos 2 sin
(м ) .
a
b
Внутренние усилия в пластине находим по известным зависимостям (1.16), подставляя в них найденное выражение w (x, y):
2w
2w
М x D 2 2 D 1 2 1 2
y
x
4 2
2x
y
2
2x
y
D 2 cos
sin
2 1 cos
sin ;
a
b
a
b
b
a
2w
2w
М y D 2 2 D 1 2 1 2
x
y
2
2x
y
4 2
2x
y
D 2 1 cos
2 cos
sin ;
sin
a
b
a
b
a
b
2 2
2x
y
H D (1 ) 1 2 D (1 )
sin
cos .
ab
a
b
Подставив значения , D, 0,15 и упростив, получим
x
y
y
М x 4,197 sin
16 cos sin ;
6
4
6
x
y
y
М y 27,96 sin
1,325 cos sin ;
6
4
6
x
y
H 35,68 sin
cos .
4
6
Запишем выражения прогибов и изгибающих моментов для
сечений, проходящих через центр пластины.
x
При y = b/2: w ( x) 4 ,68 1 cos (мм ) ;
4
x
x
М x 4,2 1 16 cos ; М y 28,0 1 1,325 cos (кН м/м ).
4
4
63
y
(мм) ;
6
y
y
М x 71,4 sin ; М y 65,0 sin
(кН м/м ).
6
6
При x = a/2: w ( y ) 9 ,36 sin
С помощью полученных выражений находим численные значения и строим эпюры прогибов и изгибающих моментов для
средних сечений плиты (рис. 2.12). Напряжения в плите можно
найти, воспользовавшись формулами (1.17), (1.18).
x
F
F
b/2
a/2
y
71,4
6,6
a/2
9,4
w, мм
0
a/2
0
4,7
4,7
9,4
63
46
50,5
6,6
b/2
65
50,5
Mx, кН∙м/м
46
My, кН∙м/м
w, мм
63
Mx, кН∙м/м
4,2
4,2
71,4
9,1
9,1
28
My, кН∙м/м
28
65
Рис. 2.12. Прогибы и усилия в прямоугольной плите
Понятно, что ограничившись одним членом в задании функции прогибов, мы не получим решение хорошей точности. Кроме
того аппроксимация решения с помощью непрерывно гладких базисных функций не может в должной мере учитывать сосредоточенные нагрузки, а также сложные краевые условия.
В этой связи метод Бубнова – Галеркина по большей части
используется как вспомогательный метод, позволяющий достаточно просто получить приближенные аналитические выражения для
прогибов и внутренних усилий, ограничившись лишь одним-двумя
членами в представлении искомой функции (2.15). Такое решение
может быть использовано в качестве предварительной оценки напряженно-деформированного состояния пластины и для контроля
решения, полученного более точным (но и сложным) методом.
64
Контрольные вопросы
1. Приведите классификацию приближенных методов по типу
разрешающих уравнений.
2. Назовите приближенные методы решения краевых задач
для дифференциальных уравнений.
3. Какие из приближенных методов относятся к прямым вариационным методам?
4. Дайте классификацию методов по схеме построения приближенного решения задачи.
5. Какие из приближенных методов относятся к проекционным методам?
6. Дайте классификацию приближенных методов по виду искомого решения.
7. Какие из приближенных методов относятся к численным
методам?
8. Приведите классификацию приближенных методов по типу
основных неизвестных.
9. В чем суть (идея) метода конечных разностей (МКР)?
10. Что понимается под узлами и узловыми неизвестными в
МКР?
11. Что называется конечно-разностным оператором в МКР?
12. Приведите разностную схему бигармонического оператора
Лапласа для квадратной сетки.
13. Запишите уравнение МКР для расчета пластины на упругом основании.
14. Какой вид имеют граничные условия в МКР для защемленного и опертого краев?
15. Каким образом в МКР исключаются законтурные узлы при
заделке и при опертом крае?
16. Какой вид имеют граничные условия в МКР для свободного края пластины?
17. Сколько законтурных узлов вводится при расчете пластины со свободным краем?
65
18. В чем суть проекционных методов приближенного решения задач?
19. Какое условие лежит в основе метода Бубнова – Галеркина
(МБГ)?
20. Что такое базисные функции, какие требования к ним
предъявляются?
21. В каком виде задается функция прогибов в методе Бубнова
– Галеркина?
22. Назовите методы, родственные методу Бубнова – Галеркина.
23. Чем метод Петрова – Галеркина отличается от метода
Бубнова – Галеркина?
24. В чем заключается суть метода наименьших квадратов?
25. Чем отличается метод Канторовича – Власова от метода
Бубнова – Галеркина?
26. Какого вида функции обычно применяются в качестве базисных функций?
27. Каким условиям и как строго должны удовлетворять базисные функции в методе Бубнова – Галеркина?
28. Приведите базисные функции для случая защемления обоих краев пластины.
29. Запишите базисные функции для случая шарнирного опирания краев пластины.
30. Приведите базисные функции для случая защемления и
опирания краев пластины.
66
Глава 3. ВАРИАЦИОННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ
Большую группу приближенных методов составляют так называемые прямые вариационные методы (прямые методы решения вариационных задач). Суть этих методов в том, что минуя
дифференциальные уравнения, на основе вариационных принципов
механики деформируемого тела строят процедуры для отыскания
приближенного решения задачи. Этим методам посвящено много
учебной литературы, в том числе [4, 6, 7]. В данной главе рассмотрены наиболее характерные методы этой группы – это вариационно-разностный метод, метод Ритца – Тимошенко и широко применяемый в настоящее время метод конечных элементов.
3.1. Вариационная постановка задачи изгиба пластины
Задача изгиба пластин, как и другие задачи механики деформируемого твердого тела, допускают как дифференциальную, так и
вариационную постановку задачи. В последнем случае проблема
решения дифференциальных уравнений заменяется проблемой определения функций, обеспечивающих стационарное значение (минимум или максимум) некоторого функционала Э (когда вариация
δЭ = 0). Условия стационарности в задачах механики деформируемого твердого тела выражают общие свойства упругих систем и в
такой формулировке носят название вариационных принципов.
Функционал – это математическое понятие для обозначения
некоторой переменной величины, заданной на множестве функций
и зависящей от выбора этих функций, между тем как функция – это
переменная, зависящая от величины аргументов этой функции. В
первом случае, изменяя вид функций (варьируя их), изменяем величину функционала, а во втором, изменяя величину аргументов,
определяем значение функции. Таким образом, операция варьирования предполагает, что при фиксированных аргументах имеет место переход от одной функции к другой (т. е. меняется ее вид).
Для построения вариационной задачи изгиба пластины воспользуемся принципом минимума полной потенциальной энергии
системы (принцип Лагранжа), согласно которому из всех возможных перемещений системы, истинными являются такие перемещения, которые сообщают функционалу полной потенциальной
энергии минимальное значение ( Э ( w) min ).
67
Полная потенциальная энергия деформации упругой системы
представляет собой сумму потенциальной энергии деформации U и
потенциала внешних сил П:
Э U П.
(3.1)
Общее выражение потенциальной энергии деформации (накопленной в упругом теле)
U
1
ij ij dV ,
2
V
(3.2)
где V – объем тела; σij, εij – компоненты тензоров напряжений и деформаций.
Для тонкой пластины с учетом гипотез Кирхгофа (при σz = 0;
γxz = γyz = 0), выражение (3.2) принимает вид
U
1
( x x y y xy xy ) dV .
2
V
(3.3)
Подставим в формулу (3.3) выражения деформаций (1.12) и напряжений (1.14), (1.15) через прогибы w (x, y):
U
Е
2(1 2 )
V
2 w
2w 2w 2w
2w 2w
2 2 2 2 2 2
x
y x
x y
y
dV .
z 2
2
2
w w
2
(
1
)
x y x y
Проинтегрировав по z от –h/2 до h/2 и приведя подобные члены, получим:
D
U
2
2 w 2
2
x
2
2w
2w
2w 2w
2 2 2
2 (1 )
2
y
x y
x y
2
d
или
U
D
2
2 w 2 w 2
2 w 2 w 2 w 2
d , (3.4)
2
(
1
)
x 2 y 2 x y
x 2 y 2
где Ω – площадь срединной поверхности пластины.
68
Для прямоугольной пластины c закрепленными (w = 0) краями
2 w 2 w 2 w 2
dx dy 0 .
2
2
x y
x y
ab
00
В этом случае выражение для потенциальной энергии примет вид
D
U
2
2
2w 2w
x 2 y 2 dxdy.
00
ab
(3.5)
Потенциал внешних сил П определяется как работа (со знаком
минус) внешних сил qdxdy на перемещениях w при переходе изогнутой пластины в начальное недеформируемое состояние:
П T q ( x, y ) w ( x, y ) d .
(3.6)
Для прямоугольной пластины, нагруженной кроме распределенной нагрузки q (x, y) также и сосредоточенными силами Fk , в
выражение (3.6) должна быть добавлена работа этих сил на соответствующих перемещениях w (xk, yk):
ab
П q ( x, y ) w ( x, y ) dxdy
00
nF
Fk w ( xk , yk ) .
(3.7)
k 1
Таким образом, выражение полной потенциальной энергии
деформации для закрепленной прямоугольной пластины имеет вид:
D
Э U П
2
2
2w 2w
x 2 y 2 dxdy
00
ab
ab
q ( x, y) w ( x, y) dxdy
(3.8)
nF
Fk w ( xk , yk ) .
k 1
00
Приведем выражение полной энергии в матричной форме:
Э
1
1
T
σ
ε
dV
p
u
dV
ε T D ε dV pu dV
2 V
2 V
V
V
1
(A w)T D (A w) d
2
(3.9)
q ( x, y) w d .
69
Здесь u, p, σ, ε – соответственно векторы перемещений, нагрузки, напряжений и деформаций; D – матрица упругих констант;
A – матрица операций дифференцирования. Для задачи изгиба пластины указанные вектора и матрицы имеют следующее содержание:
x
x
u w; p q; σ y ; ε y ;
xy
xy
2 x 2
1
0
D D 1 0 ; A 2 y 2 .
1
2 2 xy
0 0
2
(3.10)
Выражение полной энергии системы в виде (3.9) является общим для любых статических задач механики деформируемого
твердого тела (в данном случае двумерных).
Выражение (3.8) или (3.9) также называют функционалом полной энергии деформации (функционалом Лагранжа), оно является
важной характеристикой напряженно-деформированного состояния
упругого тела. В частности, формулируется принцип минимума потенциальной энергии (принцип Лагранжа), являющийся одним из
основных вариационных принципов механики [1, 3, 7].
Таким образом, вариационная постановка задачи изгиба пластины заключается в минимизации функционала Лагранжа, т. е.
Э (Э П ) 0,
Э lim Э, Э Э( w w) Э( w).
(3.11)
w 0
Здесь ∆w – приращение прогибов пластины; δ – символ вариации
(линейной составляющей приращения) функционала.
При приближенном решении задачи выполнение условие (3.11)
означает, что полная энергия деформации, вычисленная на полученных приближенных перемещениях, будет больше действительной
энергии деформации, вычисленной для действительных (т. е. точных) перемещений.
Использование вариационного уравнения Лагранжа не требует
заранее удовлетворять статическим граничным условиям, так как
70
они выполняются автоматически (такие условия называются естественными). Кинематическим граничным условиям (которые называются главными) следует удовлетворять обязательно. Кроме того в
функционале Лагранжа (3.8), как видим, используются производные куда более низкого порядка, чем в дифференциальном уравнении изгиба пластины (вторые производные против четвертых).
Отметим также, что из вариационного уравнения (3.11) всегда
может быть получено дифференциальное уравнение краевой задачи
(в нашем случае это уравнение С. Жермен), которое в этом случае
называется уравнением Эйлера для вариационной задачи.
3.2. Вариационно-разностный метод
Вариационно-разностный метод (ВРМ) является аналогом
метода конечных разностей применительно к решению вариационных задач. Основная идея ВРМ заключается в дискретизации вариационной задачи в сеточной области с помощью конечных разностей. То есть, как и в МКР, здесь используется разностная сетка с
неизвестными перемещениями в ее узлах. Однако далее используется не дифференциальное уравнение, как в методе сеток, а функционал полной потенциальной энергии изгиба пластины (3.8). Производные в выражении полной энергии деформации заменяются
разностными отношениями. Минимизация функционала приводит к
системе алгебраических уравнений относительно узловых перемещений. Внутренние усилия в узлах сетки вычисляются, как и в
МКР, через соответствующие разностные отношения.
При использовании ВРМ требуется удовлетворять только кинематическим граничным условиям, статические граничные условия удовлетворяются при минимизации полной энергии деформации. Это позволяет в некоторой степени упростить реализацию
вариационно-разностного метода по сравнению с МКР.
Помимо этого, в дифференциальном уравнении изгиба пластины используются производные до четвертого порядка, для разностной аппроксимации которых в МКР приходится вводить одиндва ряда законтурных точек. В функционале же полной энергии
деформации производные не превышают второго порядка.
Рассмотрим реализацию вариационно-разностного метода при
решении задачи изгиба прямоугольных пластин.
71
Так как интегрирование в (3.8) по разностной схеме выполняется приближенно (по формуле прямоугольников), то при дискретизации задачи конечно-разностной сеткой (соответственно с шагом ∆x и ∆y) интегралы в выражении полной энергии деформации
заменяем суммированием по всем узлам сетки:
D
Э
2
N
N
nF
( k ) x y qk wk x y Fk wk ,
2
2
k 1
k 1
(3.12)
k 1
где квадрат гармонического оператора Лапласа
2
2w
w
2 2
( k ) 2 2
x
y
k
2
2w
x 2
k
2
2
2
2w
w
w
2
2 2
2
y
x k y
k
k
2
. (3.13)
k
Условие минимума функционала (3.12) будет иметь следующий вид:
Э N Э D
w k 1 wk
2
n
N
( k2 ) 2
w x y qk x y Fk 0.
k 1
k 1
k 1
k
N
F
(3.14)
Записывая это условие для каждого узла сетки, получаем систему алгебраических уравнений, из решения которой определяются
перемещения в этих узлах.
Представим разностный оператор вариационного уравнения
(3.14) для произвольного узла сетки k в следующем виде:
Fk
1 ( k2 ) 2
1
qk
, k 1, ... , N ,
2 wk
D
x y
(3.15)
где N – общее число узлов сетки; qk – средняя интенсивность нагрузки, приходящейся на площадку ∆x×∆y, примыкающую к узлу k.
Отметим сходство оператора (3.15) с операторами (2.6), (2.7), применяемыми при расчете пластин МКР.
Таким же образом, как было получено разностное выражение
для бигармонического оператора 4 wk (см. раздел 2.1), можно получить и разностное выражение для левой части уравнения (3.15),
записанное через значения перемещений в узлах сетки (рис. 3.1, а).
Продемонстрируем вывод разностного оператора на примере
первого слагаемого в разложении ( k2 ) 2 (3.13).
72
2w
Обозначим wk 2 , тогда, взяв производную от сложной
x k
функции и применив конечно-разностное выражение для второй
производной (2.2), получим:
w
w
w
1 ( wk ) 2
2
wa a wk k wc c
2 wk
2
wa
wk
wk
( wi 2 wa wk ) ( wi 2 wa wk ) ( wa 2 wk wc )
2
2
2
w
x
k x
x
( wa 2 wk wc ) ( wk 2 wc wm ) ( wk 2 wc wm )
2
2
2
w
w
k x
x
k x
1
( wi 2wa wk ) 1 ( wa 2wk wc ) (2) ( wk 2wc wm ) 1
4x
1
wi 4wa 6wk 4wc wm .
4x
а)
l
i
x
g
b
h
a
k
c
f
d
e
m
∆y
n
∆x
y
б)
μ
2k 2
1 ( )
2 wk
η
2
–4(1+μ)
2
–4(1+η)
8+6(μ + η)
–4(1+η)
2
–4(1+μ)
2
μ
η
∆x
1
x 2y
2
∆y
Рис. 3.1. Разностный оператор вариационного уравнения
73
Аналогично выводятся и остальные разностные соотношения,
входящие в левую часть вариационного уравнения (3.15). В результате получим следующий вид этого оператора (рис. 3.1, б). Как видим, для прямоугольной пластины с равномерной сеткой он полностью
соответствует
бигармоническому
оператору
4 wk ,
используемому при расчете пластин МКР.
Однако при расчете пластин сложной конфигурации, с меняющимися геометрическими характеристиками, неравномерной
сеткой, статическими граничными условиями (в том числе со свободными или нагруженными краями) ВРМ имеет преимущества
перед МКР, позволяя получать достаточно точные результаты [5].
В свою очередь более точное решение для конструкций простой геометрии может быть получено, если применять для их расчета разностные соотношения, записанные для конструкций более
сложной геометрии. В частности, точность результатов для пластины прямоугольного очертания можно повысить, применяя при ее
расчете соотношения ВРМ, выведенные для пластины произвольного очертания, т. е. используя выражение потенциальной энергии
деформации в виде (3.4), а не (3.5).
3.3. Метод Ритца – Тимошенко
Метод Ритца – Тимошенко (МРТ) является приближенным
численно-аналитическим вариационным методом. Разработан
швейцарским физиком В. Ритцем в 1908 г, независимо и практически одновременно использовался С. П. Тимошенко для решения задач изгиба и устойчивости конструкций.
В основе метода – вариационный принцип Лагранжа (минимума полной потенциальной энергии системы). Однако вместо конечно-разностной аппроксимации искомого решения (как в ВРМ), в
методе Ритца – Тимошенко приближенное решение задается в виде
линейной комбинации базисных функций (так же, как в МБГ).
Подставим в функционал Лагранжа (3.8), записанный для
прямоугольной пластины, функцию прогибов wN (x, y), заданную в
виде
N
N
wN i i (x, y ) i 1i (x) 2i ( y ) .
i 1
74
j 1
(3.16)
Здесь i − коэффициенты, подлежащие определению; 1i ( x) ,
2i ( y ) − некоторые заданные функции, удовлетворяющие геометрическим граничным условиям на гранях пластины.
Полученное выражение полной потенциальной энергии деформации прямоугольной пластины Э (i ) является квадратичной
функцией параметров i :
D
Э ( i )
2
2
N
N
(
x
)
(
y
)
(
x
)
(
y
)
i 1i 2i dxdy
2i
i 1i
i 1
0 0 i 1
ab
ab
N n
i q ( x, y ) 1i ( x) 2i ( y ) dxdy i Fk 1i ( xk ) 2i ( yk ) .
i 1
i 1 k 1
00
N
F
Минимуму полной потенциальной энергии пластины соответствует условие равенства нулю ее производных по параметрам i
Э
0, i 1, 2, ... , N .
i
(3.17)
Производная квадратичной функции параметров i представляет собой линейную функцию этих параметров, таким образом,
получаем систему N линейных алгебраических уравнений относительно искомых неизвестных i . Заметим, что уравнения (3.17) выражают как условия равновесия, так и статические граничные условия. В связи с этим при задании функций 1i , 2i , входящих в
выражение прогибов (3.16), обязательно удовлетворять лишь кинематическим граничным условиям.
При удачном выборе базисных функций 1i ( x) и 2i ( y ) , при
условии их ортогональности система уравнений упрощается, и для
нахождения каждого коэффициента i получаем формулу [2]:
i
Bi
Ai
1
D
ab
nF
00
k 1
q ( x, y) 1i 2i dxdy Fk 1i 2i
1i 2i
ab
2
2 1i 1i 2i 2i 1i 2i 2 dxdy
.
(3.18)
00
75
Подставив найденные параметры i в (3.16), получим искомую функцию прогибов пластины wN (x, y) . Полученное решение
является приближенным, его сходимость зависит от числа членов в
задании функции wN .
При этом отметим, что хотя удовлетворение статическим граничным условиям в методе Ритца – Тимошенко строго не обязательно, функции 1i , 2i лучше по возможности выбирать так, чтобы они удовлетворяли всем граничным условиям: геометрическим
и статическим. В этом случае приближенное решение лучше сходится к точному решению и для снижения трудоемкости вычислений достаточно ограничиться одним-двумя членами в (3.16).
Внутренние усилия в пластине определяем при помощи зависимостей (1.16), подставляя в них найденную функцию w (x, y), т. е.
точно так же, как в методе Бубнова – Галеркина.
Кстати, методу Бубнова – Галеркина может быть дана и вариационная трактовка. Левая часть дифференциального уравнения
(2.14) 4 w q D представляет собой проекцию на ось z всех
внешних и внутренних сил, действующих на бесконечно малый
элемент пластины. Функция прогибов wN (x, y) есть перемещения в
направлении той же оси. Значит, базисные функции i ( x, y) , входящие в wN , можно рассматривать как возможные перемещения в
направлении оси z. Следовательно, уравнения метода Бубнова –
Галеркина (2.17) приближенно выражают равенство нулю сумму
работ всех внешних и внутренних сил в пластине на возможных
перемещениях i .
Данное положение отвечает вариационному принципу возможных перемещений. С этой точки зрения методы Бубнова – Галеркина и Ритца – Тимошенко равноценны и приводят к одинаковым результатам, если функции i выбраны так, чтобы
удовлетворять всем граничным условиям. Но при этом заметим,
что в обоих случаях выполнение статических граничных условий
не является строго обязательным.
76
3.4. Метод конечных элементов
3.4.1. Основные положения метода конечных элементов
Метод конечных элементов (МКЭ) является одним из самых
распространенных методов решения прикладных задач в различных
областях науки и инженерной практики. Следует отметить, что
возникновение и развитие МКЭ связано прежде всего с решением
задач строительной механики и в настоящее время этот метод реализован в большинстве программно-вычислительных комплексов,
предназначенных для расчета самых разных строительных конструкций и сооружений на ЭВМ.
Для развития МКЭ особое значение имели вариационные
принципы механики и математические методы, основанные на этих
принципах. Распространению МКЭ также способствовал прогресс
современной компьютерной техники и ее применение в инженерных расчетах. К настоящему времени издано большое количество
учебной литературы, посвященной как теоретическим, так и прикладным вопросам метода конечных элементов [6, 7, 9, 11].
МКЭ, как и другие численные (сеточные) методы, основан
на представлении континуального тела его дискретной моделью и
замене дифференциальных или интегральных уравнений, описывающих напряжено-деформированное состояние сплошного тела,
системой алгебраических уравнений относительно значений искомого решения в узлах сетки.
МКЭ относится к проекционным методам, но в отличие от
методов Ритца – Тимошенко, Бубнова – Галеркина и подобных им,
аппроксимация искомых функций здесь выполняется не по всей
области решения задачи, а по отдельным подобластям, связанным
друг с другом через общие узловые точки. Эти малые, но конечных
размеров подобласти называются конечными элементами (КЭ), а
сам процесс разбивки всей области на КЭ – дискретизацией.
И наконец, в общем случае МКЭ – это вариационный метод.
Функционал энергии для всей рассматриваемой области здесь
представляется в виде суммы функционалов отдельных ее частей –
конечных элементов. Из условия стационарности функционала получаем систему алгебраических уравнений для определения узловых неизвестных – значений искомых функций в узлах конечноэлементной сетки.
77
Таким образом, суть метода конечных элементов заключается
в разбивке области, занимаемой конструкцией, на конечные элементы с узловыми точками (так наз. конечно-элементная сетка).
В пределах каждого КЭ искомое решение аппроксимируется базисными функциями, выраженными через его значения в узловых точках. Такого рода кусочно-непрерывная аппроксимация выполняется с помощью специально подобранных базисных функций,
называемых также координатными или функциями формы. С их
помощью искомые непрерывные величины (перемещения, напряжения и т. д.) в пределах каждого КЭ выражаются через значения
этих величин в узловых точках, а произвольная заданная нагрузка
заменяется системой эквивалентных узловых сил. В этом случае
полностью обеспечивается условие совместности решения лишь в
узлах КЭ, а в остальных точках по границам элемента это условие
удовлетворяется в общем случае приближенно (в связи с этим различают КЭ разной степени совместности).
В зависимости от типа конструкции и характера ее деформации конечные элементы могут иметь различную форму. Так, при
расчете двумерных систем (пластины, оболочки) чаще всего применяют треугольные и прямоугольные (плоские или изогнутые)
элементы. Между собой КЭ связываются только в узлах с помощью
узловых параметров.
При использовании МКЭ в форме метода перемещений узловыми параметрами являются компоненты перемещений. Число параметров в узле конечного элемента (степень свободы узла) может
быть различным, однако не должно быть меньше минимально необходимого для описания напряженно-деформированного состояния КЭ в рамках принятой физической модели.
Степень свободы всей конструкции (порядок системы разрешающих уравнений) определяется суммарным числом всех ее узловых параметров. Способ разбивки рассматриваемой области на
конечные элементы, их число и число степеней свободы, а также
вид аппроксимирующих функций в конечном счете предопределяют точность расчета конструкции.
По сравнению с другими численными методами МКЭ в лучшей степени алгоритмизирован и более гибок при описании геометрии и граничных условий рассчитываемой области. Кроме того,
к достоинствам метода следует отнести его физическую нагляд78
ность и универсальность, а также гарантированную сходимость и
устойчивость получаемого решения. МКЭ позволяет рассчитывать
сложные конструкции, дискретная модель которых состоит из комбинаций различных типов КЭ (стержневых, пластинчатых, объемных). Благодаря разнообразию типов КЭ, возможности менять размеры, форму КЭ, сгущать сетку, этот метод удобен для расчета
конструкций с зонами концентрации напряжений, сложной формы,
с разного вида отверстиями и выемками.
Расчет МКЭ изгибаемых пластин значительно сложнее, чем
решение плоской (или пространственной) задачи теории упругости.
В последнем случае для обеспечения совместной работы КЭ достаточно поставить условие равенства перемещений в общих узлах
конечных элементов и подобрать функции формы, обеспечивающие непрерывность перемещений на сопряженных границах конечных элементов. Для изгибаемых конструкций, к которым относятся пластины и плиты, этих условий недостаточно. Здесь кроме
обеспечения совместности прогибов необходимо также обеспечить
непрерывность углов поворота в узлах и на границах смежных элементов. Тем не менее на практике часто применяются именно несовместные КЭ, в которых непрерывность на границах между элементами выполняется только для величин прогибов.
Рассмотрим пластину (рис. 3.2, а), нагруженную произвольной
поперечной нагрузкой q.
а)
б)
q (x, y)
dx
q
x
dy
Mx
x
My
z
h
h
y
y
yx
H
xy
H
Рис. 3.2. Изгибаемая пластина
Согласно принятым гипотезам Кирхгофа все деформационные
и статические величины являются функциями только одного неизвестного, а именно перемещения w в направлении нормали к срединной поверхности плиты. Так, углы поворота сечений
x
w
w
; y
,
x
y
(3.19)
79
кривизны изгиба и кручения срединной поверхности
2w
2w
2w
x 2 ; y 2 ;
.
x
y
x
y
(3.20)
В дальнейшем основные соотношения МКЭ будем записывать
в матричной форме, как наиболее удобной форме для их описания,
проведения необходимых преобразований и реализации на ЭВМ.
Погонные изгибающие и крутящий моменты Mx, My, H, представляющие собой интегральные характеристики напряжений x,
y, xy (рис. 3.2, б), определяются по формуле
Mx
x
M y D y D Aw.
H
2
(3.21)
Здесь D – матрица упругости; A – матрица дифференцирования
2
2
x2
1 0
D D 1 0 ; A 2 ,
y
1
0 0
2
2
2
x y
(3.22)
где D – цилиндрическая жесткость изгибаемой изотропной плиты.
Напряжения в элементе плиты соответственно равны:
x
Mx
12 z
12 z
y 3 M y 3 D Aw.
h
h
H
xy
(3.23)
Так как вывод конечно-элементных соотношений МКЭ в
форме метода перемещений основывается на использовании функционала Лагранжа, приведем выражение полной потенциальной
энергии изгибаемой плиты:
Э ( w)
80
1
(A w)T D (A w) d
2
q ( x, y) w d .
(3.24)
3.4.2. Прямоугольный конечный элемент изгибаемой пластины
Рассмотрим прямоугольный четырехузловой конечный элемент изгибаемой пластины со сторонами a и b (рис. 3.3). В каждом
узле за основные неизвестные принимаются следующие три обобщенных перемещения: прогиб w и углы поворота сечений x , y .
a
x
b
4
x
2
1
3
y
h
3
w
z
y
y
x
12
10
1
2
6
11
9
7
4
5
8
Рис. 3.3. Прямоугольный конечный элемент пластины
Таким образом, для всего прямоугольного КЭ с четырьмя узлами в вершинах имеем 12 узловых перемещений (степеней свободы КЭ). Поэтому для описания функции прогибов w (x, y) в пределах КЭ воспользуемся интерполирующим полиномом от двух
аргументов (x, y), содержащим 12 независимых коэффициентов. Для
подбора двумерных полиномов можно пользоваться схемой в виде
треугольника Паскаля (рис. 3.4).
1
x
x2
x3
x4
x5
y
y2
xy
x2y
xy2
y3
x3y x2y2 xy3 y4
x4y x3y2 x2y3 xy4
y5
Рис. 3.4. Двумерный треугольник Паскаля
Как видим, полный полином третьего порядка содержит 10
членов. Из треугольника Паскаля видно, что существует несколько
вариантов выбора оставшихся двух членов. Обычно добавляются
x3y и xy3, поскольку они обеспечивают симметрию аппроксимирующих выражений для узловых перемещений w, x и y:
81
w ( x, y) 1 2 x 3 y 4 x 2 5 xy 6 y 2 7 x 3 8 x 2 y 9 xy2
10 y 3 11x 3 y 12 xy3 ;
w
2 2 4 x 5 y 3 7 x 2 28 xy 9 y 2 311x 2 y 12 y 3 ;
x
w
y
3 5 y 2 6 y 8 x 2 2 9 xy 310 y 2 11x 3 312 xy2 .
y
x
В матричной форме:
1
w 1 x y x 2 xy y 2 x 3 x 2 y xy2 y 3 x 3 y xy3
2
2
2
2
3
0
1
0
2
x
y
0
3
x
2
xy
y
0
3
x
y
y
x
2
2
3
2
0
0
1
0
x
2
y
0
x
2
xy
3
y
x
3
xy
y
12
ψ
(3.25)
ψ x .
ψ y
Здесь – матрица-строка членов интерполирующего полинома;
– вектор коэффициентов интерполирующего полинома.
Как показано в [13], данная аппроксимация не обеспечивает
полностью условия непрерывности для углов поворота на границах
смежных элементов. Так, на границах вдоль оси 0x обеспечена совместность только для w и x, но без совместности для y, а вдоль
оси 0y, наоборот, нет непрерывности по x. То есть данный КЭ относится к классу несовместных элементов.
При аппроксимации функции прогибов в виде (3.25) неизвестными являются коэффициенты полинома 1 , 2 , ... , 12 . Выведем
функции формы, с помощью которых искомая функция w (x, y) в
четырехузловом КЭ может быть выражена через значения узловых
неизвестных этого же элемента.
Координаты узлов прямоугольного элемента (см. рис. 3.3):
x1 0, y1 0, x2 a, y2 0, x3 a, y3 b, x4 0, y4 b .
Подставив эти координаты в выражение (3.25) для каждого узла
КЭ, получим систему алгебраических уравнений 12-го порядка
ue C .
82
(3.26)
где u e – вектор обобщенных узловых перемещений (верхний индекс e обозначает принадлежность данных параметров отдельному
КЭ); C – матрица коэффициентов, зависящая от координат узлов
конечного элемента в местной системе координат.
w1
x1
y1
w2
x2
y 2
e
u ;
w3
x 3
y 3
w
4
x 4
y 4
1
0
0
1
0
0
C
1
0
0
1
0
0
0 0
0
0
0
0
0
0
0
1 0
0
0
0
0
0
0
0
0 1
0
0
0
0
0
0
0
a 0 a2
0
0
a3
0
0
0
1 0 2a
0
0 3a 2
0
0
0
0 1
a
0
0
a2
0
0
a b a 2 ab b 2
a3
a 2b ab 2
b3
0
0
1 0 2a
b
0 3a 2 2ab b 2
0 1
0
a
2b
0
a2
0 b
0
0 b2
0
0
0
b3
1 0
0
b
0
0
0
b2
0
0 1
0
0
2b
0
0
0
3b 2
2ab 3b 2
0
0
0
0
0
0
0
0
0
a3
0
.
3
3
a b ab
3a 2b b 3
3
2
a
3ab
0
0
0
b3
0
0
0
Решив систему уравнений (3.26) относительно неизвестных
коэффициентов и подставив решение C -1ue в первое уравнение
(3.25), получим следующее фундаментальное представление искомой непрерывной величины w (x, y) через значения обобщенных
перемещений в узловых точках конечного элемента (вектор u e ):
w ( x, y) ( x, y) ( x, y) C -1 ue ( x, y) ue .
(3.27)
Здесь ( x, y) – матрица функций формы КЭ. Входящие в нее
функции формы Nk представляют собой так называемые полиномы
Эрмита, где подстрочный индекс k соответствует порядковому
номеру (в векторе u e ) обобщенного узлового перемещения, к которому эта функция относится:
N ( x, y) N1 N 2 N3 N 4 N5 N6 N7 N8 N9 N10 N11 N12 .
83
Каждая функция формы Nk является функцией координат x, y
в пределах прямоугольного конечного элемента и может быть получена перемножением матрицы-строки членов полинома
( x, y) 1 x y x 2 xy y 2 x 3 x 2 y xy2 y 3 x3 y xy3
на k-й столбец матрицы С –1 (в данном пособии эта матрица не приводится, ее вид можно посмотреть в [7]).
Например, первая функция формы имеет такой вид:
3x 2 xy 3 y 2 2 x 3 3x 2 y 3xy2 2 y 3 2 x 3 y 2 xy3
N1 ( x, y) 1 2
2 3 2 2 3 3 3.
ab
a
b
a
ab
ab
b
ab
ab
Матрицу функций формы можно представить в блочном виде:
N ( x, y) N1 N 2 N 3 N 4 ,
(3.28)
где N i ( x, y) Ni 1 Ni 2 Ni 3 Ni Ni, x Ni, y ; индекс i соответствует
номеру узла в четырехузловом элементе; второй индекс – номеру
обобщенного перемещения в i-м узле. При этом функции формы
для углов поворота в узле могут быть получены дифференцированием функций формы прогиба в i-м узле по x и y соответственно:
Ni 2 Ni, x
N
N
; Ni 3 Ni, y
.
x
y
3.4.3. Основные соотношения для конечного элемента пластины
Подставим выражение функции прогибов (3.27) для отдельного КЭ в функционал полной потенциальной энергии изгибаемой
пластины (3.24), представив последний в виде суммы функционалов по всем N конечным элементам системы:
1
Э Э (A ue )T D (A ue ) d q ue d
e 1
e 1 2
N
e
N
1
ue (A )T D (A ) d ue q d ue .
e 1 2
N
(3.29)
Запишем условие стационарности функционала (3.29) согласно правилам матричного дифференцирования:
84
N
N e e
Э
T
e
(A ) D (A ) d u q d K u P e 0.
e
u
e 1
e1
Полученное уравнение представим в следующем виде:
N
K
e 1
N
u P e или K u P.
e e
(3.30)
e 1
Матрица K e называется матрицей жесткости (МЖ) конечного
e
элемента, а вектор P – вектором нагрузки (ВН) элемента.
K e (A )T D (A ) d ; P e q d .
(3.31)
На базе элементных МЖ и ВН в порядке, изложенном далее,
формируются глобальная матрица жесткости системы элементов K и глобальный вектор нагрузки P. Матричное уравнение
(3.30) представляет собой систему разрешающих уравнений МКЭ
относительно компонент перемещений во всех узлах пластины
(глобального вектора узловых перемещений u).
Матрица жесткости прямоугольного КЭ пластины, вычисленная по формуле (3.31), приводится в [7]. Представим эту матрицу в
блочном виде (число блочных строк и столбцов соответствует числу узлов КЭ):
k11 k12 k13 k14
k
k
k
k
21
22
23
24
Ke
,
(3.32)
k31 k32 k33 k34
k 41 k 42 k 43 k 44
где
ki j 11 ki j 12 ki j 13
ki j ki j 21 ki j 22 ki j 23 , i, j 1, 2, 3, 4.
ki j 31 ki j 32 ki j 33
Таким образом, матрица жесткости (3.32) является симметричной квадратной матрицей, ее размерность равна числу степеней
свободы (обобщенных узловых перемещений) КЭ. Кроме того МЖ
85
является особенной (вырожденной), поскольку блочные строки 2, 3,
4 в (3.32) эквивалентны строке 1. Физический смысл вырожденности состоит в возможности смещения КЭ как жесткого целого, в
связи с чем на перемещения элемента необходимо наложить не менее трех связей при соблюдении условий геометрической неизменяемости (так же, как и на всю пластину в целом).
Вектор нагрузки в блочном виде запишется так:
p1
pi1
p
P e 2 , где pi pi 2 , i 1, 2, 3, 4.
p
p3
i3
p4
(3.33)
В случае нагружения прямоугольного КЭ равномерно распределенной поверхностной нагрузкой (q = const) будем иметь
P
e T
qab
6 a b 6 a b 6 a b 6 a b .
24
Подставив (3.27) в (3.21) и (3.23), запишем внутренние усилия
и напряжения в КЭ пластины через узловые перемещения:
M e D AN ue ;
e
12 z
D AN ue.
3
h
(3.34)
После подстановки в матрицу ( AN ) координат узлов прямоугольного элемента получим следующие расчетные формулы:
M e G e ue ;
e
12 z e
M .
h3
(3.35)
Здесь M e – вектор узловых значений внутренних усилий в КЭ;
e – вектор узловых значений напряжений в КЭ.
M M
e T
x1
e T
x1
M y1 H1 M x 2 M y 2 H 2 M x3 M y 3 H 3 M x 4 M y 4 H 4 ;
y1 xy1 x 2 y 2 xy 2 x3 y 3 xy3 x 4 y 4 xy 4 .
Матрица для вычисления усилий и напряжений G e DAN
(матрица усилий КЭ) приводится в [7].
86
3.4.4. Алгоритм расчета методом конечных элементов
Алгоритм расчета МКЭ сводится к последовательности шагов,
в результате выполнения которых находится решение рассматриваемой задачи (перемещения, внутренние усилия, напряжения). На
практике расчеты по МКЭ всегда выполняются с применением
компьютерной техники и программных средств, реализующих соответствующие матричные формулы и выражения для получения
промежуточных и конечных результатов.
Ниже приведены основные этапы статического расчета конструкции методом конечных элементов [3, 7].
1. Дискретизация конструкции. Область, занимаемая конструкцией, разбивается на конечные элементы, соединенные между
собой в узловых точках. При решении задач изгиба пластин дискретизация расчетной области обычно производится прямоугольными элементами (треугольные КЭ применяются для скошенных
краев пластины). В местах быстроменяющейся распределенной нагрузки, а также предполагаемых высоких градиентов искомых величин сетку КЭ сгущают. Те места, где приложены сосредоточенные нагрузки или опорные связи, должны быть отнесены к узлам.
Таким образом, первый этап заключается в составлении конечно-элементной схемы (дискретной модели) конструкции.
Здесь можно выделить следующие действия:
1) выбор типа КЭ (по геометрии, виду аппроксимации и т. п.);
2) разбивку области на КЭ (с нумерацией узлов и элементов);
3) описание каждого КЭ: топологические (число узлов КЭ и
их номера), физико-механические (коэффициенты упругости и т. п.)
и геометрические характеристики (размеры сечения и т. п.);
4) описание каждого узла (координаты, свойства узла);
5) описание заданных узловых нагрузок и перемещений.
2. Построение глобальных матрицы жесткости и вектора узловых сил. Выполняются формирование МЖ и ВН отдельных
элементов и их размещение в глобальных матрицах путем обхода
по всем конечным элементам дискретной схемы.
Расчеты по МКЭ различных конструкций отличаются принципиально только применяемыми элементными МЖ, ВН и матричными операторами для определения внутренних усилий в КЭ. Размещение элементных матриц жесткости (а также векторов
87
нагрузки) в глобальную матрицу (и, соответственно, в глобальный
вектор) может быть выполнено одним из следующих способов [11]:
1) непосредственного сложения жесткостей;
2) конгруэнтного преобразования;
3) при помощи конечно-разностных операторов.
Способ непосредственного сложения жесткостей, используемый в большинстве случаев, реализуется следующим образом:
МЖ отдельного элемента представляется в блочном виде,
адреса блоков соответствуют локальным номерам узлов в КЭ и одновременно глобальным номерам этих же узлов в дискретной области;
глобальная МЖ также представляется в блочном виде, адреса блоков соответствуют глобальным номерам узлов;
МЖ каждого элемента размещается поблочно в глобальной
МЖ согласно глобальным адресам этих блоков (на основе информации о соответствии глобальной и локальной нумерации узлов).
На рис. 3.5 изображена схема размещения МЖ четырехузлового КЭ пластины (три степени свободы в узле) в глобальной МЖ.
Здесь 1, 2, 3, 4 – локальные номера узлов КЭ; t, s, o, r – соответствующие им глобальные номера. Аналогичным образом из элементных ВН формируется глобальный ВН для всей конструкции.
1
K
e
локальные
номера узлов
o
r
s
t
o
k33
k34
k32
k31
r
k43
k44
k42
k41
k42 11 k42 12 k42 13
s
k23
k24
k22
k21
k42 21 k42 22 k42 23
t
k13
k14
k12
k11
k42 31 k42 32 k42 33
k
2
3
4
1
k11 k12 k13
k14 t
2
k21 k22 k23
k24 s
3
k31 k32 k33 k34 o
4
k41 k42 k43 k44 r
t
s
o
r
K
глобальные
номера узлов
Рис. 3.5. Схема формирования глобальной матрицы жесткости
88
Таким образом, данный этап включает следующие основные
действия, выполняемые в цикле для каждого КЭ:
1) составление МЖ и ВН для КЭ в локальной системе координат;
2) преобразование элементных МЖ и ВН из локальной в глобальную систему координат (в том случае, если локальная система
координат не совпадает с глобальной);
3) размещение элементных МЖ и ВН в глобальных МЖ и ВН.
Сформированная на этом этапе глобальная МЖ системы является вырожденной (особенной). Она может быть преобразована в
невырожденную при учете кинематических граничных условий
(внешних связей, наложенных на отдельные узлы и исключающих
перемещение конструкции как абсолютно твердого тела).
3. Учет заданных граничных условий. Пусть после выполнения второго этапа система разрешающих уравнений имеет вид
K u P,
(3.36)
где глобальная матрица жесткости K содержит коэффициенты ki j ,
вектор узловых перемещений u – компоненты обобщенных перемещений ui ; вектор узловой нагрузки P – обобщенные узловые
силы Pi (i, j = 1, …, n; n – число степеней свободы всей системы).
Статические граничные условия учитываются при формировании вектора нагрузки P. Распределенные нагрузки либо учитываются через элементные ВН (3.33), либо заменяются эквивалентными обобщенными узловыми силами Pkузл , которые, как и
заданная узловая нагрузка, добавляются к соответствующим компонентам глобального вектора нагрузки:
Pk Pk Pkузл, k 1, ... , nP ,
(3.37)
где nP – число компонент заданной узловой нагрузки.
Кинематические граничные условия, как правило, представляются в виде заданных узловых перемещений (равных и не равных
нулю). Нулевые перемещения соответствуют абсолютно жестким
опорным связям, наложенным на некоторые узлы дискретной модели конструкции. Отличные от нуля заданные перемещения могут
быть обусловлены неточностью изготовления (монтажа), регулированием усилий, смещением (осадкой) опор и т. п.
89
Пусть u m – заданное перемещение по направлению m-й степени свободы (m = 1, … , nu). Тогда корректировка системы уравнений (3.36) может производиться следующим образом (в цикле по
всем компонентам заданных узловых перемещений nu):
1) из вектора P вычитается m-й столбец матрицы K, умноженный на величину u m :
Pi Pi ki mum , i 1, ... , n ;
2) обнуляются m-я строка и m-й столбец матрицы K:
ki m 0 ; km i 0 , i 1, ... , n ;
3) m-й коэффициент главной диагонали следует положить
равным единице, а соответствующую компоненту вектора P – равной u m :
km m 1; Pm um .
Если заданное перемещение um ≠ 0, то выполняются все перечисленные пункты, если um 0 – выполняются только пункты 2 и 3.
В последнем случае также можно вычеркнуть всю m-ю строку
и m-й столбец из матрицы K и m-ю компоненту из векторов P и u,
тем самым уменьшив размерность системы алгебраических уравнений МКЭ на число компонент заданных нулевых смещений.
Помимо жестких связей и смещений опор в реальной конструкции могут иметь место упругие связи (упругое основание).
Наиболее простой является дискретная модель основания, когда
упругие связи приложены в узлах конечно-элементной сетки. В
этом случае к диагональным коэффициентам МЖ системы (3.36)
просто добавляются коэффициенты жесткости упругих связей:
ki i ki i kiупр, i 1, ... , n .
(3.38)
Учет упругого основания будет более точным, если при его
дискретизации использовать вариационные принципы (например,
принцип Лагранжа). При таком подходе для каждого конечного
элемента, подобно МЖ, строится так называемая матрица реакций
основания. Эта матрица добавляется к МЖ элемента, и далее расчет производится в обычном порядке. Подробнее расчет конструкций на упругом основании изложен в [8].
90
Последовательность действий при учете заданных (статических и кинематических) граничных условий:
1) добавление заданной узловой нагрузки в глобальный ВН;
2) изменение МЖ при учете заданного упругого основания;
3) корректировка системы уравнений (МЖ и ВН) при учете
заданных ненулевых смещений узлов;
4) преобразование системы уравнений при учете жестких
опорных связей (нулевых перемещений).
В результате учета граничных условий глобальная система
разрешающих уравнений будет сформирована в окончательном и в
то же время достаточном для получения искомого решения виде.
4. Решение системы разрешающих уравнений. Система
разрешающих уравнений МКЭ для статической задачи представляет собой систему линейных алгебраических уравнений (СЛАУ) с
симметричной, положительно определенной матрицей коэффициентов, как правило, ленточной структуры.
Прежде всего, следует выбрать метод решения СЛАУ. Для небольших и средних задач – от нескольких десятков до нескольких
десятков тысяч неизвестных – обычно используются так называемые прямые методы: Гаусса, разложения Холесского, LDLT–
факторизации и т. п. Для более сложных систем, требующих огромного объема вычислений и значительной памяти, приходится
подбирать и, если необходимо, создавать специально подходящие
для данной задачи эффективные алгоритмы, основанные как на
прямых, так и на итерационных методах [6, 7].
Отметим также некоторые особенности, присущие системе
разрешающих уравнений МКЭ. Эти особенности могут значительно влиять на точность получаемого решения и объем вычислений.
Во-первых, при рациональной нумерации узлов матрица коэффициентов СЛАУ имеет ленточную структуру. Это означает,
что ненулевые коэффициенты матрицы содержатся только в пределах некоторой полосы – ленты, занимающей диагональное положение в матрице (рис. 3.6). Внутри ленты могут находиться и нулевые коэффициенты. Важным моментом является то, что область
нулевых элементов матрицы, расположенная выше и ниже ленты,
остается нулевой и в процессе решения системы уравнений. Очевидно, что с уменьшением ширины ленты уменьшается и объем
производимых вычислений.
91
nb
Главная диагональ
0
Лента
0
n
Рис. 3.6. Матрица коэффициентов СЛАУ с ленточной структурой
Ширина ленты определяется по формуле
nb (rmax 1) ns ,
где rmax – величина наибольшей разности между глобальными номерами узлов в пределах каждого КЭ, определяемая при обходе по
всем элементам дискретной области; ns – число степеней свободы
узла. Для уменьшения ширины ленты следует стремиться к оптимальной нумерации узлов, при которой параметр rmax принимает
минимальное значение.
Во-вторых, при решении систем уравнений больших порядков
важным фактором является значительное накопление ошибок округления, возникающих в процессе огромного количества арифметических операций (например, при использовании метода Гаусса
2
число операций умножения чисел примерно равно n nb / 3 ). В этом
случае уже при нескольких сотнях уравнений рекомендуется применять двойную точность вычислений (16 знаков после запятой),
иначе следует считаться с неизбежной погрешностью получаемого
решения.
5. Определение внутренних усилий (напряжений). Результатом решения системы разрешающих уравнений МКЭ в форме метода перемещений будут компоненты узловых перемещений дискретной модели конструкции (вектор u).
Вычисление необходимых компонент напряженного состояния конструкции производится поэлементно в следующем порядке:
92
1) из общего вектора узловых перемещений u составляется
элементный вектор узловых перемещений – u e (используем информацию о соответствии глобальной и локальной нумерации узлов);
2) если локальная система координат для КЭ не совпадает с
глобальной, производится преобразование элементного вектора u e
для локальной системы координат;
3) на основе геометрических и физических соотношений формируется матрица усилий (напряжений) для КЭ – G e ;
4) вычисляется вектор узловых значений внутренних усилий
(напряжений) для КЭ – S e , который связан с узловыми перемещениями в общем случае следующим соотношением:
S e G e ue .
(3.39)
Так как значения усилий (напряжений), вычисленные в конкретном узле, но для разных КЭ (смежных к этому узлу), будут несколько отличаться, то после окончания поэлементного обхода выполняется осреднение узловых значений по смежным элементам.
Данная процедура выражается следующими формулами:
S k S k i ne или S k S k i i
ne
i 1
ne
i 1
ne
i .
(3.40)
i 1
Первая формула реализует простое усреднение, вторая – более точное – весовое усреднение. Здесь S k – значение усилия в k-м узле;
ne – число КЭ, смежных с узлом k; i – весовой коэффициент, учитывающий вклад каждого КЭ в соответствии с его размерами и
формой (обычно i принимается равным площади i-го элемента).
Процедура осреднения позволяет в некоторой степени уточнить значения усилий в узлах сетки, однако лучшие результаты дает использование метода сопряженной аппроксимации [3]. Найденные с помощью этого метода усилия и напряжения оказываются
согласованными с принятыми для КЭ аппроксимирующими полиномами для перемещений.
93
3.4.5. Пример расчета изгибаемой плиты МКЭ
В качестве примера рассмотрим задачу расчета квадратной
плиты со стороной l, защемленной по всему контуру и нагруженной равномерно распределенной нагрузкой q. С учетом двуосной
симметрии рассчитываем только одну четверть плиты.
Если плита разбита на четыре элемента, то рассчитываемая
область будет содержать всего один конечный элемент (рис. 3.7, а).
Из условий симметрии и граничных условий на защемленном контуре имеем: x1 y1 w2 x 2 y 2 w3 x3 y 3 w4 x 4 y 4 0.
а)
б)
1
2
4
3
в)
г)
Рис. 3.7. Дискретная модель плиты
Таким образом, расчет сводится к решению одного уравнения
k11w1 P1 .
Приняв = 0,2, определяем k11 и P1:
k11 60 (c d
2
D
a
; c ;
15ab
b
2
D
6qab ql 2
) 30 84 42 ,24 2 ; P1
,
где
24
16
l
b
(1 )
(выражения приведены в [7]).
d ;
a
2
P1 q l 2
l2
ql 4
0,00148
В результате получим: w1
k11 16 42 .24 D l 2
D
(точное решение w1 0,00126 ql 4 D ).
Используя (3.35), вычислим изгибающие моменты в узле 1:
D
s w1 0,0462ql 2 ; M y1 D t w1 0,0462ql 2 ,
ab
ab
где s 6 (c d ); t 6 (c d ) [7].
M x1
94
Изгибающие моменты в узлах 2 и 4:
M x2
D
6d w1 0.0355 ql 2 ; M y 4 D 6c w1 0.0355 ql 2 .
ab
ab
Точное решение: M x1 M y1 0,023 ql 2 ; M x 2 M y 4 0.0513 ql 2 .
Рассматриваемая плита была рассчитана для четырех разных
сеток (рис. 3.7, а, б, в, г) на распределенную нагрузку q и на сосредоточенную силу F, приложенную в центре. Результаты расчета для
прогиба w в центре плиты приведены в табл. 3.1. Распределение изгибающих моментов Mx вдоль оси симметрии плиты (для случая
распределенной нагрузки) показано на рис. 3.8.
Таблица 3.1
Результаты расчета квадратной изотропной плиты
Сетка
Число
элементов
Число
узлов
Распр. нагрузка q
Сосред. cила F
w (10-3 ql4 / D)
w (10-3 Fl2 / D)
22
4
9
1,48
5,92
44
16
25
1,40
6,13
88
64
81
1,30
5,80
16 16
256
289
1,27
5,67
1,26
5,60
Точное решение
Mx (ql2)
–0,05
–0,04
–0,03
–0,02
–0,01
0
0,01
0,02
0,03
0,04
0,05
1616
88
44
22
Рис. 3.8. Изгибающие моменты в квадратной плите
95
По приведенным результатам видно, что точность полученного по МКЭ решения несколько выше при равномерно распределенной, чем при сосредоточенной нагрузке. В свою очередь точность
определения усилий значительно ниже, чем основных неизвестных
– перемещений. Тем не менее следует отметить, что рассмотренный
несовместный элемент дает неплохую сходимость к точному решению и ввиду своей относительной простоты имеет большое практическое применение.
Для построения совместного прямоугольного элемента необходимо ввести еще одну основную неизвестную в каждом узле –
2w
, а для аппроксимации перемещения w(x, y) в конечном элеxy
менте использовать полином с 16 независимыми коэффициентами:
w( x, y ) 1 2 x 3 y 4 x 2 5 xy 6 y 2 7 x 3 8 x 2 y 9 xy2
10 y 3 11x 3 y 12 xy3 13 x 3 y 2 14 x 2 y 3 15 x 2 y 2 16 x 3 y 3 .
Исходя из этого, МЖ и ВН совместного элемента с 16 степенями свободы могут быть получены тем же способом, что и для
элемента с 12 степенями [9, 10].
При расчете плит произвольной конфигурации, в том числе с
отверстиями, выемками, скошенными краями и т. п., недостаточно
применения только прямоугольных КЭ. В этих случаях возникает
необходимость в треугольных элементах, которые, как и прямоугольные, могут быть несовместными и совместными. Так, простейшим несовместным элементом является треугольник с тремя
степенями свободы в каждом из трех узлов, находящихся в вершинах: w, x, y. Совместный трехузловой элемент должен иметь уже
2w 2w 2w
по 6 степеней в каждом узле: w, x , y ,
. Суще,
,
xy x 2 y 2
ствуют и другие элементы треугольной формы, отличающиеся числом узлов, числом степеней свободы в каждом узле, видом аппроксимирующего полинома, причем не только в формулировке метода
перемещений, но и метода сил (где основными неизвестными будут
являться моменты Mx, My, H), а также смешанного метода [3, 8, 13].
Однако следует иметь в виду, что использовать одни только
треугольные элементы для расчета изгибаемых плит нецелесообразно. В общем случае вывод матрицы жесткости для треугольного
96
элемента является очень громоздким, поэтому в явном виде данная
матрица практически не используется. А главное – разбивка области только на треугольные элементы дает менее точные результаты,
чем расчет с использованием прямоугольных элементов при одинаковом числе степеней свободы.
В связи с этим для изгибаемых плит, имеющих произвольный
контур, рекомендуется по возможности применять ортогональную
сетку конечных элементов. При такой сетке все элементы во внутренней области будут прямоугольными, а элементы, примыкающие
к контуру – треугольными. Также могут быть использованы и четырехугольные элементы, получаемые, как правило, комбинацией
треугольных элементов.
Рассмотренная здесь задача расчета тонких плит на основе
технической теории Кирхгофа наиболее часто применяема в практике инженерных расчетов. Однако имеют место и другие задачи, и
соответствующие им модели изгиба плит. Например, если плита
является многослойной или имеет значительную толщину, то деформациями сдвига пренебрегать нельзя. В этом случае используются более строгие математические модели, как, например, теория
плит Рейсснера. В основе этой теории лежит предположение о
том, что прямолинейный элемент, перпендикулярный к срединной
поверхности плиты до деформации, остается и после деформации
прямолинейным и неизменной длины (εz = 0), но не обязательно
перпендикулярным к деформированной срединной поверхности. В
качестве основных неизвестных при использовании модели Рейсснера выступают как перемещения, так и внутренние усилия.
Широкое распространение в МКЭ получила модель Миндлина, основанная почти на тех же предположениях, что и модель
Рейсснера (различие между ними в том, что у Рейсснера εz = 0,
у Миндлина z = 0). Кроме того вариационная формулировка
модели Миндлина базируется на функционале потенциальной энергии плиты, а Рейсснера – на смешанном его виде [11, 13].
Помимо вышеперечисленных, элементами строительных конструкций могут быть плиты на упругом основании, с заполнителем,
с ребрами жесткости и т. д. Особенности их расчета приводятся соответственно в [6, 8, 15].
97
Контрольные вопросы
1. В чем суть приближенных вариационных методов расчета
изгибаемых плит?
2. Сформулируйте вариационный принцип Лагранжа.
3. Приведите выражение полной потенциальной энергии деформации пластины.
4. В чем преимущества вариационной постановки задачи перед дифференциальной?
5. Какова основная идея вариационно-разностного метода
(ВРМ)?
6. Чем похожи и чем различаются вариационно-разностный
метод и метод конечных разностей?
7. В каких случаях ВРМ имеет преимущества перед методом
конечных разностей?
8. На чем основывается метод Ритца – Тимошенко и в чем его
суть?
9. В каком виде представляется функция прогибов в методе
Ритца – Тимошенко?
10. Каким образом можно повысить точность решения в методе Ритца – Тимошенко?
11. В чем суть метода конечных элементов как сеточного проекционного метода?
12. Что такое конечный элемент? Как он связан с другими конечными элементами расчетной области?
13. С помощью какого рода функций и как выполняется аппроксимация в методе конечных элементов?
14. Что понимается под степенью свободы узла, конечного
элемента, конструкции?
15. Перечислите основные достоинства метода конечных элементов.
16. В чем сложность расчета изгибаемых пластин в сравнении
с другими задачами теории упругости?
98
17. Приведите функционал Лагранжа для двумерной задачи в
матричной форме.
18. Какие компоненты приняты за основные неизвестные при
расчете пластин методом конечных элементов?
19. Запишите полином из 12 членов для аппроксимации функции прогибов в прямоугольном конечном элементе пластины.
20. Как из аппроксимирующего полинома функции прогиба
можно получить функции формы конечного элемента пластины?
21. Приведите интегральные выражения для вычисления матрицы жесткости и вектора нагрузки конечного элемента пластины.
22. Представьте в блочном виде матрицу жесткости четырехузлового элемента пластины.
23. Запишите матричные выражения для определения усилий
и напряжений в конечном элементе через узловые перемещения.
24. В чем заключается первый этап расчета методом конечных
элементов? Основные действия на этом этапе?
25. Приведите второй этап алгоритма расчета методом конечных элементов. Последовательность действий на этом этапе?
26. На основе какой информации матрицы жесткости конечных элементов размещаются в глобальной матрице жесткости?
27. Какие действия необходимо выполнить на третьем этапе
расчета МКЭ, перед решением системы разрешающих уравнений?
28. Каким способом могут учитываться жесткие связи в узловых точках конечно элементной сетки?
29. Какие действий выполняются на заключительных (четвертом и пятом) этапах расчета методом конечных элементов?
30. Что означает осреднение узловых значений по смежным
конечным элементам, для чего это нужно?
99
Глава 4. ОСНОВЫ ТЕОРИИ РАСЧЕТА ОБОЛОЧЕК
4.1. Общие положения о расчете тонких оболочек
4.1.1. Основные понятия и определения
Оболочки относятся к несущим тонкостенным конструкциям,
широко используемым в качестве перекрытий зданий промышленного, культурного и спортивного назначения, выставочных и торговых павильонов, различного рода надземных, подземных, подводных и транспортных сооружений.
Оболочки отличаются присущей им легкостью и выразительностью, могут применяться для перекрытия больших площадей и
объемов, при этом обладают относительно высокой несущей способностью, жесткостью и экономичностью. Объясняется это тем,
что внешняя поперечная нагрузка на оболочку воспринимается не
только изгибающими внутренними усилиями, как в пластинах, но и
возникающими в срединной поверхности нормальными и сдвигающими усилиями (здесь уместно провести аналогию с арками и
балками).
Оболочкой будем называть тело, ограниченное двумя криволинейными поверхностями, расстояние h между которыми (толщина оболочки) мало по сравнению с другими размерами тела (рис.
4.1, а). В дальнейшем будем рассматривать оболочки постоянной
толщины h = const, выполненные из линейно-упругого материала.
Поверхность, делящая толщину h пополам, называется срединной
поверхностью оболочки (СПО). Геометрия оболочки полностью
определяется геометрией ее срединной поверхности.
а)
б)
n
n
СПО
h
НСО
2
ЛГК
1
ППО
f
R
R2
Рис. 4.1. Основные понятия оболочки
100
R1
Горизонтальную плоскость, на которую проецируется контур
оболочки, будем называть плоскостью проекции оболочки (ППО).
Сечение оболочки, совпадающее с нормалью к ее срединной поверхности, называется нормальным сечением оболочки (НСО).
Расстояние от плоскости проекции до срединной поверхности называется стрелой подъема оболочки и обозначается f.
Основной геометрической характеристикой оболочки является
кривизна срединной поверхности k = 1/R, где R – радиус кривизны
к нормальному сечению оболочки. Среди всех нормальных сечений
можно выделить два такие, кривизны к которым принимают наибольшее и наименьшее значение k1, k2. Эти кривизны (k1 = 1/R1;
k2 = 1/R2) называются главными, а соответствующие им направления – главными направлениями 1, 2 (рис. 4.1, б). Соответственно
линии, лежащие на срединной поверхности в направлении главных
кривизн называются линиями главных кривизн (ЛГК) или просто
линиями кривизн.
Общая геометрия оболочки характеризуется средней кривизной срединной поверхности и гауссовой кривизной, которая представляет собой произведение главных кривизн:
kср (k1 k2 ) 2 ; K k1 k2 .
(4.1)
В зависимости от знака величины K различают оболочки положительной гауссовой кривизны (или просто – положительной
кривизны, рис. 4.2, а), к ним относятся эллиптические, параболические, сферические оболочки; нулевой кривизны (цилиндрические,
конические оболочки, рис. 4.2, б); отрицательной кривизны (гиперболические оболочки, рис. 4.2, в). Оболочки смешанной кривизны
состоят из участков с различной гауссовой кривизной, например,
тороидальные поверхности. Оболочки положительной и отрицательной кривизны еще называют оболочками двоякой кривизны.
а)
б)
f0
в)
f0
f0
Рис. 4.2. Виды оболочек по кривизне
101
По способу образования криволинейной поверхности различают оболочки вращения, образуемые вращением некоторой плоской кривой (образующей) вокруг прямолинейной оси (рис. 4.3, а)
и оболочки переноса, которые получаются путем перемещения образующей кривой по заданной направляющей (кривой или прямой)
(рис. 4.3, б).
а)
б)
Ось
Образующая
Образующая
Направляющая
Рис. 4.3. Виды оболочек по образованию
Поверхность оболочки может быть описана в декартовой системе координат
(4.2)
z z ( x, y).
Для поверхности переноса уравнение (4.2) принимает следующий
вид:
x2
y2
(4.3)
z ( x, y ) z ( x) z ( y ) f1 2 f 2 2 f 0 .
a
b
Здесь 2a, 2b – размеры сторон прямоугольной проекции оболочки;
f1, f2 – стрелы подъема сторон по контуру оболочки; f0 = f1 + f2 –
стрела подъема в центре (рис. 4.4).
z
y
f0
0
x1
f2
b
x
b
f1
a
a
Рис. 4.4. Оболочка в декартовой системе координат
102
Однако при выводе определяющих соотношений не всегда
удобно пользоваться декартовой системой координат. В этом случае целесообразно связать систему координат непосредственно с
самой поверхностью оболочки. Чаще всего применяется криволинейная система координат, где две координатные линии ξ, η совпадают с линиями главных кривизн и образуют на срединной поверхности ортогональную сетку; ось z направлена по нормали в
сторону центра кривизны (рис. 4.5). Конкретный вид и смысл этих
координат для разных типов оболочек может быть самым различным. На рис. 4.5, а, б, в, например, показаны соответственно эллиптические, цилиндрические и сферические координатные линии.
а)
б)
в)
η
z
z
ξ
ξ
η
η
ξ
Рис. 4.5. Оболочки в криволинейных системах координат
4.1.2. Деформации и усилия в тонких оболочках
Общая теория тонких оболочек значительно сложнее, чем
теория пластин, хотя обе они основаны на одних и тех же гипотезах. Практический расчет оболочек выполняется на основе технической теории тонких жестких оболочек.
К тонким оболочкам относятся тонкостенные конструкции,
для которых
1
h
1
,
1000 Rmin 30
где R min – минимальный радиус срединной поверхности оболочки.
Данному диапазону толщин отвечают жесткие, гибкие и абсолютно гибкие оболочки, причем грань между этими типами оболочек весьма условна. Многое зависит от того, с какой точностью
допустимо находить перемещения и усилия в оболочке.
103
Если толщина конструкции выходит за нижнюю границу
диапазона, то конструкции рассматривается как пластина, если за
верхнюю границу – относится к толстым оболочкам, рассчитываемым как трехмерное упругое тело. Однако возникающие в последнем случае трудности заставляют применять теорию расчета
тонких оболочек при отношениях h/Rmin до 1/5 и даже до 1/3.
В основе теории тонких оболочек лежат две гипотезы, которые являются обобщением гипотез Кирхгофа.
1. Гипотеза прямых нормалей: отрезок нормали к срединной
поверхности остается прямолинейным и нормальным к ней и после
деформирования оболочки и не меняет своей длины (εz = 0).
2. Гипотеза о ненадавливании слоев: нормальные напряжения, действующие на площадках, параллельных срединной поверхности оболочки, принимаются равными нулю (σz = 0).
Допущение же о недеформируемости срединной поверхности оболочки принимать нельзя. В этом отношении оболочка так
же отличается от плиты, как арка от балки. Оболочка, как и арка,
является распорной конструкцией, и в ней обязательно присутствуют усилия, действующие в срединной поверхности (цепные усилия). Поэтому жесткие и гибкие оболочки отличают друг от друга
не по наличию цепных усилий – таковые имеются в обеих конструкциях, а по характеру деформирования. Для гибких оболочек гипотезу о малости перемещений принимать нельзя и задачу приходится решать в геометрически нелинейной постановке. К
абсолютно гибким оболочкам относятся конструкции, в которых
невозможны деформации изгиба и кручения. Ниже рассматриваются только жесткие оболочки, у которых перемещение по нормали
(прогиб оболочки) удовлетворяет условию w < h/2.
Принятые допущения, а также использование криволинейной системы координат дает возможность выразить деформации в
любой точке оболочки через деформации ее срединной поверхности, которые зависят от двух координат ξ, η, и таким образом свести решение трехмерной задачи теории упругости к двумерной задаче теории оболочек. Следует отметить, что принятые гипотезы
дают погрешность порядка h/R, поэтому при выводе соотношений
в теории тонких оболочек величинами, имеющими порядок h/R,
пренебрегают по сравнению с единицей.
104
Выберем координатные оси ξ и η так, чтобы они совпадали с
линиями главных кривизн срединной поверхности оболочки, а ось z
направим по нормали к ней. Кривизны срединной поверхности
оболочки в исходном (недеформированном) состоянии обозначим
через kξ, kη. Выделим бесконечно малый элемент оболочки, образованный двумя парами плоскостей, нормальных к срединной поверхности и совпадающих с направлениями главных кривизн
(рис. 4.6, а).
б)
а)
ξ
ξ
z
z
h/2
z
h/2
η
Rξ
Rη
H
H
S
Nξ
Mξ
S
η
Mη
Nη
Рис. 4.6. Элемент тонкой оболочки
Рассмотрим слой оболочки, находящийся на расстоянии z от
срединной поверхности. В результате деформирования срединной
поверхности и поворота боковых граней элемента в этом слое появляются деформации , , :
( z ) 0 z; ( z ) 0 z; ( z ) 0 z,
(4.4)
где 0 , 0 , 0 – деформации, относящиеся к срединной поверхности оболочки; , , – изменения кривизн изгиба и кручения
срединной поверхности. Выражения для деформаций в срединной
поверхности и изменений кривизн для некоторых типов оболочек
будут получены в дальнейшем.
Используя закон Гука, запишем выражения нормальных и касательных напряжений в этом же слое:
E
E
(
);
( );
1 2
1 2
G .
(4.5)
105
Напряжения в тонких жестких оболочках связаны с внутренними усилиями следующими интегральными зависимостями [1]:
N
h/2
dz;
N
h / 2
h/2
M
z dz;
h/2
dz;
h / 2
M
h / 2
h/2
z dz;
h / 2
S
h/2
dz;
h / 2
H
h/2
(4.6)
z dz .
h / 2
Подставляя зависимости (4.5) в выражения (4.6), получим
N С ( 0 0 );
N С ( 0 0 );
M D ( ); M D ( );
S
Eh
0;
2 (1 )
(4.7)
H (1 ) D .
Здесь Nξ, Nη, S = Sξη = Sηξ – нормальные и сдвигающие усилия,
действующие в плоскостях, касательных к срединной поверхности
(рис. 4.6, б); Mξ, Mη, H = Hξη, = Hηξ – изгибающие и крутящие моE h3
Eh
менты; С
, D
– цилиндрические жесткости обо2
2
12 (1 )
1
лочки соответственно на растяжение и на изгиб.
Как видно, соотношения для моментов (4.7) подобны аналогичным соотношениям, полученным в теории изгиба тонких пластин (1.16). Как и в пластинах, эти моменты, а также нормальные и
сдвигающие усилия являются в действительности интенсивностями
соответствующих усилий, приходящихся на единицу длины срединной поверхности оболочки.
Напряжения связаны с усилиями известными зависимостями
N
h
12M
h3
z ;
N
h
12M
h3
z;
S 12 H
3 z.
h
h
(4.8)
Эти равенства дают ответ на вопрос, почему задача о напряженном состоянии оболочки считается решенной, как только будут
найдены все усилия.
106
4.1.3. Частные теории расчета тонких оболочек
Расчет оболочек произвольного вида даже в рамках теории
тонких оболочек представляет собой сложную задачу, в связи с
чем при ее решении часто используются различные упрощения.
Многие оболочки обладают свойствами, учет которых позволяет заметно упростить расчет этих конструкций. В качестве одного из примеров можно привести оболочки вращения (см. рис. 4.5, в),
статические и кинематические уравнения для которых из-за осевой
симметрии конструкции имеют более простую, чем в общем случае, форму. Наделены индивидуальными качествами также цилиндрические оболочки и так называемые пологие оболочки, в которых упрощение общей теории возможно за счет предположений,
связанных с геометрией таких оболочек.
По виду напряженного состояния различают моментную,
безмоментную и полубезмоментную теории оболочек.
Если напряжения, вызываемые изгибом оболочки, малы по
сравнению с напряжениями, обусловленными деформациями срединной поверхности, то изгибающими и крутящим моментами, а
также перерезывающими силами пренебрегают и определяют только усилия в срединной поверхности. Такая теория носит название
безмоментной теории оболочек. Расчет по безмоментной теории
значительно проще расчета по общей – моментной теории. Причем состояние одной и той же оболочки при разных нагружениях
может быть как моментным, так и безмоментным.
Оболочку называют безмоментной, если в ней нет деформаций изгиба и кручения. Естественно считать состояние оболочки
безмоментным и в том случае, когда усилия Mξ, Mη, H приводят к
напряжениям, пренебрежимо малым по сравнению с напряжениями
от усилий Nξ, Nη и S. Исследования показывают, что состояние
оболочки может рассматриваться как безмоментное, если выполняются нижеперечисленные условия.
1. Срединная поверхность оболочки должна быть гладкой и
односвязной.
2. Нагрузка на оболочку должна быть плавной и непрерывной.
3. Края оболочки должны иметь возможность беспрепятственно перемещаться в направлении нормали к срединной поверхности.
Однако при этом граничные условия должны обеспечивать неизменяемость формы оболочки.
107
4. Нагрузки, приложенные к краям оболочки, должны лежать
в плоскости, касательной к ее срединной поверхности.
На первый взгляд, эти ограничения столь жестки, что класс
безмоментных оболочек должен быть весьма узким. Особенно обременительными выглядят требования 3 и 4. Но во многих случаях
нарушение этих требований приводит лишь к появлению у границ
оболочки зон локальных деформаций, т. е. к возникновению изгиба
и кручения только в непосредственной близости от опор. Такое явление называют краевым эффектом. При разделении напряженнодеформированного состояния оболочек на общее состояние и краевой эффект их расчет упрощается.
При расчете цилиндрических оболочек, вытянутых в одном
направлении, более точные результаты дает полубезмоментная
теория цилиндрических оболочек, предложенная В. З. Власовым.
В ее основе лежит допущение о малости изгибающего момента Mη
(если ось η совпадает с образующей срединной поверхности оболочки, Rη = и нагрузка распределена равномерно вдоль этой оси
– см. рис. 4.5, б) и крутящего момента H. Кроме того, в этом случае
вводятся геометрические гипотезы: 0 0; 0 0 (координатная
линия ξ совпадает с направляющей срединной поверхности оболочки).
Упрощение моментной (общей) теории оболочек возможно
также за счет наложения некоторых ограничений на геометрию ее
срединной поверхности. Одним из вариантов такой теории является
теория пологих оболочек.
Из сказанного становится ясной необходимость в построении
индивидуальных теорий, с помощью которых напряженнодеформированное состояние каждого конкретного класса оболочек
описывается наиболее просто. Имеется еще одна причина, заставляющая обращаться к частным теориям оболочек. Дело в том, что
найти усилия и перемещения в оболочке произвольного вида можно лишь численно. Анализ результатов расчета, установленных
численными методами, при первом знакомстве с предметом исследований малоэффективен. Путь же к аналитическим и численноаналитическим решениям задачи открывают частные теории расчета оболочек.
108
4.2. Расчет тонких пологих оболочек
4.2.1. Уравнения равновесия пологой оболочки
Пологие оболочки широко применяются для устройства
большепролетных перекрытий, поэтому их рассмотрение представляет особенный интерес. Пологой называется оболочка, имеющая
относительно небольшой подъем над плоскостью своей проекции:
1
1
1
min (l1 , l2 ) либо f1
l1 , f 2
l2 ,
5
10
10
где f0, f1, f2 – стрелы подъема оболочки в центре и по сторонам;
l1 = 2a, l2 = 2b – размеры оболочки в плане (см. рис. 4.4).
Напряженное состояние пологой оболочки является переходным от невыгодного чисто моментного напряженного состояния
пластины к выгодному безмоментному состоянию оболочки. Таким
образом, пологие оболочки занимают промежуточное положение
между изгибаемыми плитами и безмоментыми оболочками, соединяя преимущества первых в части распределения материала по перекрываемой площади с преимуществом оболочек в части распределения напряжений по толщине.
Будем рассматривать пологие оболочки прямоугольного в
плане очертания, которые наиболее распространены в строительной практике в качестве перекрытий различного рода сооружений.
Теория пологих оболочек создана В. З. Власовым и основывается
на следующих двух гипотезах, дополняющих основные гипотезы
технической теории тонких оболочек:
1. Геометрия срединной поверхности оболочки приближенно
отождествляется с геометрией плоскости ее проекции. В этом случае криволинейные координаты, откладываемые вдоль линий главных кривизн, можно считать совпадающими с декартовыми координатами, т. е. ξ = x, η = y. Если срединную поверхность описывать
выражением z = z (x, y), то главные кривизны можно определять так:
f0
2 z
2 z
kx 2 ; k y 2 .
x
y
(4.9)
В этом случае при f 0 l 1 5 гауссову кривизну для пологих оболочек приближенно можно считать равной нулю: K k x k y 0.
109
2. В определяющих соотношениях влиянием поперечных сил,
а также перемещений в плоскости x, y пренебрегают (сохраняя
только члены, содержащие перемещения по нормали к срединной
поверхности w).
На основании всех принятых гипотез и в предположении малости прогиба оболочки и малости деформаций в срединной поверхности величины изменения кривизн изгиба и кручения определятся по тем же формулам, что и в пластинах (1.13):
2w
2w
2w
x 2 ; y 2 ;
,
x y
x
y
(4.10)
а деформации срединной поверхности будут иметь вид [1]:
0x
u
v
u v
k x w; 0y k y w; 0
.
x
y
y x
(4.11)
Здесь u, v, w – перемещения точек срединной поверхности в направлении соответствующих координатных осей.
Воспользовавшись (4.7) и (4.10), получим выражения изгибающих и крутящего моментов, которые аналогичны соотношениям для изгибаемой пластины (1.16),
2w
2w
2w
2w
М x D 2 2 ; М y D 2 2 ;
y
x
x
y
H D (1 )
w
.
x y
(4.12)
2
Выражения нормальных и сдвигающих усилий будут следующими:
N x Е1h (0x 0y ); N y Е1h (0y 0x ); S G h 0 ,
(4.13)
где E1 E / (1 2 ) ; G E / 2 (1 ) .
Рассмотрим прямоугольный в плане бесконечно малый элемент пологой оболочки размерами dx×dy, на боковых гранях которого действуют усилия в срединной поверхности (рис. 4.7, а), а
также моменты и поперечные силы (рис. 4.7, б). Нормально к срединной поверхности приложена внешняя поперечная нагрузка q.
110
а)
б)
Ny
S
Nx
S
q
Mx
H
z
Nx+дNx /дx dx
Ny+дNy /дy dy S+дS/дy dy
y
My+дMy /дy dy
x
H+дH/дx dx
z
Mx+дMx /дxdx
H+дH/дy dy
S+дS/дx dx
y
My
H
Qx
x
Qy
Qx+дQx /дx dx
Qy+дQy /дy dy
Рис. 4.7. Усилия в элементе пологой оболочки
Составим уравнения равновесия элемента оболочки: суммы
проекций всех сил по направлениям координатных осей x, y, z и
суммы моментов относительно осей x, y. В итоге получим следующую систему уравнений [1]:
N y S
N x S
Qx Q y
0;
0;
N xkx N yk y q ;
x y
y
x
x
y
M y H
M x H
Qx ;
Qy .
x
y
y
x
(4.14)
Исключим из этих уравнений поперечные силы Qx и Qy: продифференцировав 4-е и 5-е уравнения (4.14) по x, y и подставив в
3-е уравнение, имеем обобщающее уравнение равновесия
2
2М x
2H М y
2
N x k x N y k y q.
x 2
x y
y2
(4.15)
Если изгибающие и крутящие моменты, а также поперечные
силы в оболочке тождественно равны нулю, то напряженное состояние оказывается безмоментным. При этом в оболочке будут
действовать только усилия в срединной поверхности Nx, Ny, S, которые могут быть найдены из системы трех уравнений равновесия
N y S
N x S
0;
0; N x k x N y k y q.
x y
y x
(4.16)
В тех случаях, когда задача является статически определимой,
для нахождения усилий Nx, Ny, S достаточно уравнений (4.16).
111
4.2.2. Разрешающая система уравнений и граничные условия
Для решения задачи расчета пологой оболочки воспользуемся
функцией напряжений φ, выразив через нее усилия в срединной
поверхности оболочки:
2
2
2
N x h 2 ; N y h 2 ; S h
.
x
y
y
x
(4.17)
Тогда система уравнений (4.11) – (4.14) может быть сведена к двум
разрешающим уравнениям с двумя неизвестными функциями: прогиба w и функции напряжений φ.
С учетом (4.17) первые два уравнения (4.14) удовлетворяются
тождественно, а уравнение (4.15), заменяющее три последних уравнения равновесия, после подстановки в него усилий (4.12) приобретает следующий вид:
D 2 2 w h k2 q,
(4.18)
где дифференциальные операторы 2, 2 обозначают так:
2
2
2
2
2
2 2 ; k kx 2 k y 2 .
x y
y
x
2
(4.19)
Для вывода второго разрешающего уравнения подставим выражения (4.11) в первое уравнение неразрывности деформаций СенВенана (1.10):
2
2
2 x y xy
.
2
2
x
y
y
x
В результате получим
2 0
2 0x y 2 0
2w
2w
2
kx 2 k y 2 .
2
x y
y
x
y
x
(4.20)
Заменив в этом уравнении деформации усилиями с помощью
формул (4.13), а затем сами усилия функцией напряжений с помощью формул (4.17), придем к уравнению
1 2 2
2w
2w
kx 2 k y 2 .
E
y
x
112
(4.21)
Таким образом получаем систему двух дифференциальных
уравнений относительно двух неизвестных функций w и φ
D 4 w h k2 q;
E k2 w 4 0.
(4.22)
Данные уравнения справедливы для пологих оболочек,
имеющих постоянные кривизны kx и ky, и для оболочек, срединная
поверхность которых образована перемещением плоской кривой по
произвольной направляющей с сохранением параллельности этой
кривой ее первоначальному положению (оболочки переноса).
Если срединная поверхность оболочки задана произвольной
функцией z = z (x, y), то кривизны также будут функциями двух
переменных. В этом случае дифференциальные операторы (4.19)
примут иной вид [12].
Система дифференциальных уравнений (4.22) обобщает две
задачи: плоскую задачу теории упругости и задачу изгиба тонкой
пластины. Действительно, полагая главные кривизны оболочки
равными нулю (kx = ky = 0), получаем k2 0 , и система распадается на два независимых уравнения:
D 4 w q;
4
0.
(4.23)
Первое уравнение представляет собой уравнение Софи Жермен для
изгибаемой пластины, второе – бигармоническое уравнение плоской задачи теории упругости.
Для безмоментной пологой оболочки функция напряжений (а
по ней и усилия в срединной поверхности Nx, Ny, S) находится из
решения следующего дифференциального уравнения:
h k2 q.
(4.24)
Решение уравнений (4.22), (4.23) или (4.24) должно удовлетворять
граничным условиям, которые формулируются для всех кромок
оболочки.
Рассмотрим различные случаи граничных условий для прямоугольной в плане пологой оболочки, кромки которой совпадают с
координатными линиями x и y, являющимися линиями главных
113
кривизн. На каждой кромке оболочки накладываются ограничения
на функции w и φ, причем таких условий должно быть четыре – по
два условия на каждую из функций w и φ. Заметим, что краевые
условия, зависящие от прогиба оболочки, имеют точно такой же
вид, что и для жестких пластин.
Так, для жестко защемленной кромки оболочки, параллельной
координатной линии y (для точек этой кромки при x = ±a – рис.
4.8), справедливы условия
w0
w
0
x
;
x a
x a
(4.25)
.
b
0
x1
x
b
z
a
a
y
Рис. 4.8. Тонкая пологая оболочка
Для шарнирно закрепленной кромки x = ±a:
w0
x a
;
2w
0
x 2
x a
.
(4.26)
Запишем также наиболее характерные граничные условия, которые накладываются на функцию φ.
Для кромки x = ±a, которая может свободно перемещаться в
направлении оси x,
2
x 0 x a или
0 x a.
(4.27)
2
y
Для кромки x = ±a, свободно смещаемой в направлении оси y,
xy 0
114
x a
2
или
0
x y
x a
.
(4.28)
Граничные условия для других кромок оболочки формулируются аналогично. Например, для кромки, параллельной координатной линии x (при y = ±b), в приведенных выше условиях следует
поменять местами x и y, a и b.
При решении практических задач могут встретиться различные комбинации перечисленных условий. Например, для жестко
защемленной кромки x = ±a, где исключаются перемещения в направлении осей x, y и z, следует положить
uvw
w
0
x
x a
(4.29)
.
При свободном опирании кромок оболочки на торцевые диафрагмы (рис. 4.9), абсолютно жесткие по отношению к деформациям в своей плоскости и гибкие из нее, граничные условия принимают следующий вид:
vw
0 x a ;
2
2
x
y
2
2
w
uw
0 y b .
y 2 x 2
2w
2
(4.30)
b
0
x1
a
a
x
b
z
y
Рис. 4.9. Опирание оболочки на диафрагмы
115
4.3. Приближенное решение задач теории оболочек
4.3.1. Общие сведения о численных методах расчета оболочек
Дифференциальные уравнения, с помощью которых описывают напряженно-деформированное состояние оболочки, за исключением лишь некоторых частных случаев (см. п. 4.1.3), не имеют
решения в замкнутой форме. Решение этих уравнений с помощью
методов численного интегрирования, таких как метод конечных
разностей и метод Бубнова – Галеркина, возможно по большей части для определенных форм геометрии оболочек, особых условий
опирания и вида нагрузки.
По этой причине применение вариационных методов, в частности МКЭ, для расчета оболочек имеет основное значение. Следует отметить, что в отличие от пластин оболочки представляют собой более сложные объекты для расчета, хотя общая теория тех и
других базируется на одних и тех же гипотезах. Однако, во-первых,
при расчете оболочек необходимо учитывать кривизну срединной
поверхности, во-вторых, деформации изгиба и деформации в срединной поверхности оболочки в общем случае являются взаимосвязанными (в линейной теории пластин эти деформации независимы).
С учетом вышесказанного полное обеспечение условий равновесия
и совместности становится очень сложным, поэтому эти условия
выполняются приближенно с помощью различных способов.
В большинстве случаев задачи изгиба, устойчивости и динамики оболочек с применением МКЭ решаются методом перемещений. Для задач статики метод перемещений преимущественно
строится на основе принципа возможных перемещений или на основе принципа минимума полной потенциальной энергии. При
этом для линейно-упругих тел оба принципа приводят к тождественным соотношениям.
Полная потенциальная энергия оболочки равна сумме потенциальной энергии деформации и потенциала внешних сил [4, 5]:
Э
1
1
N
N
2
S
d
M M 2Hd
2
2
qu qv q z w d Pi u pi Pi ui Pzi u pi .
116
i
(4.31)
В матричном виде:
Э
C
D
T
ε
E
ε
d
χT E χ d
2
2
q
T
u d Pi T ui . (4.32)
i
Здесь u, q, P, N, M, ε, – соответственно векторы перемещений, поверхностных и сосредоточенных нагрузок, внутренних усилий и деформаций; E – матрица упругих констант; C – цилиндрическая жесткость оболочки на растяжение; D – изгибная
цилиндрическая жесткость оболочки; N C E ε ; M D E χ .
Для задачи изгиба тонкой оболочки указанные векторы и матрица упругости E имеют следующее содержание:
u
q
P
N
M
u u ; q q ; P P ; N N ; M M ;
u
q
P
S
H
z
z
z
1
ε ; χ ; E
2
2
0
0
1
0 .
1
0
2
(4.33)
В задачу данного учебного пособия не входит вывод конечноэлементных соотношений для задач теории оболочек, тем более что
получение матриц жесткости и векторов нагрузки для оболочечных
элементов является довольно трудоемким процессом и в явном виде, как правило, эти матрицы не приводятся. Построение соответствующих матриц жесткости для некоторых конечных элементов
можно посмотреть в [3, 5, 9, 10, 13].
Первая и простейшая модель МКЭ для расчета оболочек построена на основе аппроксимации оболочки системой плоских конечных элементов. Матрицы жесткости таких элементов получаются объединением соответствующих матриц жесткости для
состояния плоского напряженного состояния и изгиба пластины.
Криволинейные конечные элементы впервые использовались
при расчете осесимметричных оболочек, вместо плоского конусного элемента был введен криволинейный меридиональный сегмент
оболочки. Ниже будет приведен краткий обзор используемых при
расчете оболочек типов конечных элементов.
117
Вариационно-разностный метод расчета конструкций, как и
метод конечных элементов, основан на принципе Лагранжа, т. е. в
основу положен принцип минимума полной энергии деформации.
Если в методе конечных элементов конструкция разбивается на конечные элементы, в которых перемещения аппроксимируются с
помощью функций формы, то в вариационно-разностном методе на
область конструкции наносится разностная сетка и производные в
функционале полной энергии деформации заменяются разностными отношениями. В результате функционал полной энергии становится функцией узловых перемещений, минимизируя которую, получаем систему алгебраических уравнений, из решения которой
определяются перемещения в узлах сетки. Для определения деформаций и внутренних усилий опять-таки используются разностные
производные [5].
Использование принципа Лагранжа приводит к необходимости обязательного выполнения только кинематических граничных
условий. К этим условиям в теории оболочек относятся тангенциальные и нормальные перемещения срединной поверхности и углы
поворота опорных сечений. В большинстве случаев это равенство
нулю перемещений по некоторым опорным линиям или равенство
нулю углов поворота (в случае жестко защемленных краев). В разностном методе равенство нулю тангенциальных и нормальных перемещений осуществляется приравниванием нулю перемещений в
узловых точках разностной сетки по направлению соответствующего перемещения.
Если направление опоры не совпадает с направлением ни одной из координат ξ, η, z, то приравнивается нулю комбинация проекций перемещения по направлению опоры на координатные оси:
3
ui cos i 0 ,
(4.34)
i 1
где i – углы между направлением опоры и координатной сеткой.
Сравнивая вариационно-разностный метод с методом конечных элементов, необходимо отметить, что каждый из методов имеет свои преимущества.
Преимуществом вариационно-разностного метода является
более простая программная реализация. В вариационно-разностном
118
методе неразрывность деформаций обеспечивается за счет использования общих узловых перемещений в разностных производных
соседних узлов разностной сетки. При расчете тонкостенных конструкций сложной геометрии ВРМ позволяет точно учитывать особенности геометрии срединных поверхностей оболочек, используя
в расчете коэффициенты квадратичных форм и радиусов кривизны
срединной поверхности. В методе конечных элементов геометрические характеристики срединных поверхностей обычно не используются, уравнения поверхностей используются только для разбивки
конструкции на конечные элементы и их сопряжения. При этом
возникают определенные трудности в обеспечении неразрывности
деформаций по сторонам конечных элементов.
Преимуществом метода конечных элементов является его
гибкость при расчете конструкций комбинированного типа (комбинации объемных, плоских, тонкостенных пространственных и
стержневых элементов); возможность сгущения конечноэлементной сетки в зонах концентрации напряжений (за счет измельчения размеров элементов и использования элементов различной формы). В вариационно-разностном методе обычно используется прямоугольная или криволинейная система координат,
измельчение которой в зоне концентрации напряжений приводит к
удлиненной сетке в одном из направлений при увеличении соответствующего шага сетки.
Сравнение результатов расчета вариационно-разностным методом и методом конечных элементов тонкостенных конструкций,
для которых известны точные аналитические решения (пластинки и
оболочки канонических форм: цилиндрические, сферические, конические), показывают близкую точность для одинаковых сеток. В
ряде случаев большую точность показывает вариационноразностный метод.
Соотношения вариационно-разностного метода, записанные
для конструкций более сложной геометрии, можно использовать
для расчета более простых конструкций при назначении определенных значений параметров. В частности, соотношения вариационно-разностного метода для пологих оболочек можно использовать и для расчета пластин (плоская задача и изгиб пластин) и
круговых цилиндрических оболочек.
119
4.3.2. Применение МКЭ к расчету оболочек
По способу представления геометрии срединной поверхности
оболочки конечные элементы можно разделить на три основные
группы: плоские, криволинейные и вырожденные трехмерные.
Плоские элементы представляют собой простейший и, вместе
с тем, грубый вид аппроксимации оболочки по МКЭ [3, 10]. Построение этих элементов основано на простой суперпозиции плоского напряженного состояния и изгиба пластин (рис. 4.10, а). В
этом случае обычно используются плоские конечные элементы
треугольного или прямоугольного вида. Для оболочек произвольной формы больше подходят треугольные элементы, поскольку они
лучше аппроксимируют кривую поверхность (рис. 4.10, б), для цилиндрических оболочек могут применяться плоские прямоугольные
элементы (рис. 4.10, в).
а)
w, x, y
u, υ
=
+
б)
u, υ, w,
x, y
в)
Рис. 4.10. Плоские конечные элементы оболочки
Каждый узел плоского элемента может иметь пять (u, v, w, x,
y, см. рис. 4.10, а) или шесть степеней свободы (u, v, w, x, y, z,
[13]). Преобразование КЭ из локальной системы координат в общую (глобальную) систему и наоборот производится с помощью
стандартных для МКЭ соотношений [7, 10]
e
e
e
e
K e [T ]T K лок
T ; P e [T ]T Pлок
; ue [T ]T uлок
; uлок
T ue . (4.35)
120
e
Здесь K e , K лок
– матрицы жёсткости конечного элемента в общей и
e
e
локальной системах координат; P e , Pлок
– соответственно
, ue , uлок
векторы нагрузки и узловых перемещений; T – матрица преобразования координат.
Положительное качество плоских элементов заключается в их
простоте, а отрицательное – в недостаточной аппроксимации криволинейной поверхности оболочки системой плоских элементов.
Поэтому для достижения удовлетворительных результатов здесь
следует применять достаточно густую сетку.
Криволинейные элементы строятся на основе технической
теории тонких оболочек. Основные трудности здесь связаны с выбором аппроксимирующих функций, которые должны обеспечивать
выполнение условий полноты (описание смещения элемента как
жесткого целого и обеспечения состояния постоянных деформаций
в нем) и совместности (непрерывности основных неизвестных на
смежных границах соседних элементов) конечного элемента [3, 13].
Так как при построении общего криволинейного элемента для произвольной оболочки эти условия крайне трудно обеспечить, вводятся отдельные группы элементов для определенных форм оболочек. Например, на основе теории цилиндрических оболочек могут
быть построены КЭ цилиндрической формы (рис. 4.11, а), на основе
теории пологих оболочек – пологой формы (рис. 4.11, б) и т. д.
а)
б)
x
η
2β
R
b
a
x
a
y
Рис. 4.11. Криволинейные конечные элементы оболочки
За основные неизвестные в цилиндрическом элементе принимаются следующие обобщенные перемещения: u, v, w, wx , w ,
wx . Преобразование из локальной цилиндрической системы координат в общую декартовую систему координат производится с помощью формул, аналогичных (4.31).
121
Вырожденные трехмерные элементы получают как особый
вид пространственных изопараметрических элементов (рис. 4.12,
а). При этом учитываются как малость толщины оболочки по отношению к остальным двум размерам, так и введенные предположения о характере изменения деформаций и напряжений по толщине оболочки. В основе построения таких элементов лежат обычные
гипотезы классической теории оболочек, однако предположение о
перпендикулярности нормали к деформированной срединной поверхности не используется, что дает возможность учитывать деформации сдвига [13, 15].
а)
б)
–1
–1
+1
–1
0
+1
–1
+1
0
+1
Рис. 4.12. Трехмерный конечный элемент оболочки
Для описания геометрии данного конечного элемента принимают локальную систему криволинейных координат , , лежащих
в срединной поверхности, и координату в направлении нормали к
срединной поверхности оболочки. Система координат , является
масштабированной. Это означает, что в пределах КЭ координаты
, изменяются линейно в границах от –1 до +1. Выбор интерполирующих функций и узловых точек в элементе зависит от решаемой задачи (чаще всего это изопараметрические полиномы второго
или третьего порядка). Обычно применяются 8- и 12- узловые оболочечные элементы (рис. 4.12, б) с пятью степенями свободы в каждом узле: u , v , w , , [13].
Область применения вырожденных трехмерных элементов –
расчет толстых и многослойных оболочек.
122
Контрольные вопросы
1. Что такое оболочка? Дайте определение.
2. Что такое плоскость проекции и стрела подъема оболочки?
3. Что такое кривизна срединной поверхности и чему равны
главные кривизны?
4. Чему равны средняя и гауссова кривизны оболочки?
5. Приведите классификацию оболочек по знаку кривизны.
6. Какие бывают типы оболочек по способу их образования?
7. Приведите формулу поверхности оболочки в декартовой
системе координат.
8. При каких условиях оболочка считается тонкой и жесткой?
9. Какие гипотезы приняты при расчете тонких жестких оболочек?
10. Сформулируйте гипотезу прямой нормали теории тонких
оболочек.
11. Сформулируйте гипотезу о ненадавливании слоев теории
тонких оболочек.
12. Какая из гипотез Кирхгофа не используется в теории расчета тонких оболочек? Почему?
13. Что представляют собой криволинейные координаты?
Для чего они нужны?
14. Какие перемещения и деформации учитываются при расчете тонких оболочек?
15. Какие внутренние усилия учитываются при расчете тонких
оболочек?
16. Приведите выражения нормальных усилий в оболочке через деформации.
17. Приведите выражения изгибающих моментов в оболочке
через деформации.
18. Запишите формулы цилиндрической жесткости оболочки
на растяжение и на изгиб.
19. Перечислите разновидности теорий расчета тонких оболочек.
20. В каких случаях применяется безмоментная теория оболочек?
21. При каких условиях состояние оболочки может рассматриваться как безмоментное?
22. В каком случае применяется полубезмоментная теория
цилиндрических оболочек?
123
23. Какие оболочки относятся к пологим оболочкам?
24. Какие дополнительные гипотезы вводятся при расчете пологих оболочек?
25. Какие деформации и усилия при расчете пологих оболочек
определяются так же, как в пластине?
26. Запишите обобщающее уравнение равновесия для элемента пологой оболочки.
27. Приведите разрешающую систему уравнений теории пологих оболочек.
28. Какие задачи обобщает система дифференциальных уравнений пологой оболочки?
29. На какие уравнения распадается система уравнений для пологой оболочки, если главные кривизны положить равными нулю?
30. Запишите граничные условия для шарнирно закрепленной
кромки оболочки.
31. Приведите граничные условия при опирании кромок оболочки на торцевые диафрагмы.
32. Приведите выражение полной потенциальной энергии деформации оболочки.
33. Какие приближенные методы расчета применяются для
расчета оболочек произвольного вида?
34. Каковы преимущества и недостатки применения метода
конечных элементов для расчета оболочек?
35. Каковы плюсы вариационно-разностного метода при расчете оболочек?
36. Какие типы конечных элементов применяются при расчете
оболочек разных видов?
37. В каких случаях применяются плоские КЭ? Их достоинства и недостатки?
38. В каких случаях применяются криволинейные КЭ.
Их достоинства и недостатки?
39. В каких случаях применяются трехмерные КЭ?
Их достоинства и недостатки?
40. Какие узловые неизвестные обычно принимаются при расчете оболочек МКЭ?
124
Библиографический список
1. Александров А. В. Основы теории упругости и пластичности / А. В.
Александров, В. Д. Потапов. М. : Высшая школа, 2002. 400 с.
2. Завьялов В. Н. Основы строительной механики пластин : учеб. пособие / В. Н. Завьялов, Е. А. Мартынов, В. М. Романовский. – Омск: СибАДИ,
2012. – 116 с.
3. Зенкевич О. Метод конечных элементов в технике / О. Зенкевич. –
М. : Мир, 1975. – 541 с.
4. Иванов В. Н. Вариационные принципы и методы решения задач теории упругости : учеб. пособие / В. Н. Иванов. – М. : Изд-во РУДН, 2004.
176 с.
5. Иванов В. Н. Основы метода конечных элементов и вариационноразностного метода : учеб. пособие / В. Н. Иванов. – М. : Изд-во РУДН, 2008.
168 с.
6. Ильин В. П. Численные методы решения задач строительной механики : учеб. пособие / В. П. Ильин, В. В. Карпов, А. М. Масленников. – М. :
Изд-во АСВ, 2005. 425 с.
7. Лукашевич А. А. Современные численные методы строительной механики : учеб. пособие / А. А. Лукашевич. – Хабаровск : Изд-во ХГТУ, 2003.
– 135 с.
8. Масленников А. М. Расчет строительных конструкций численными
методами : учеб. пособие / А. М. Масленников. – Л. : Изд-во Ленингр. ун-та,
1987. – 224 с.
9. Метод конечных элементов : учеб. пособие для вузов / Под ред. П.
М. Варвака. Киев: Вища школа, 1981. – 176 с.
10. Постнов В. А. Метод конечных элементов в расчетах судовых конструкций / В. А. Постнов, И. Я. Хархурим. – Л. : Судостроение, 1974. – 344 с.
11. Применение метода конечных элементов к расчету конструкций :
учеб. пособие для техн. вузов / Р. А. Хечумов, Х. Кепплер, В. И. Прокопьев;
под ред. Р. А. Хечумова. – М. : Изд-во АСВ, 1994. – 353 с.
12. Самуль В. И. Основы теории упругости и пластичности: учеб. пособие для студентов вузов / В. И. Самуль. – М. : Высшая школа, 1982. – 264 с.
13. Секулович М. Метод конечных элементов / М. Секулович. – М. :
Стройиздат, 1993. – 664 с.
14. Справочник по теории упругости / Под ред. П. М. Варвака. Киев :
Изд-во Будевильник, 1971. 418 с.
15. Строительная механика. Тонкостенные пространственные системы :
учеб. для вузов / А. В. Александров, Б. Я. Лащеников, Н. Н. Шапошников; под
ред. А. Ф. Смирнова. – М.: Стройиздат, 1983. – 488 с.
16. Тимошенко С. П. Пластины и оболочки / С. П. Тимошенко, С. Войновский-Кригер. – М. : Наука, 1966. – 636 с.
125
ОГЛАВЛЕНИЕ
ВВЕДЕНИЕ ....................................................................................................... 3
Глава 1. ОСНОВЫ ТЕОРИИ РАСЧЕТА ИЗГИБАЕМЫХ ПЛАСТИН ….. . 4
1.1. Некоторые сведения из теории упругости … ........................................ 4
1.1.1. Основные уравнения теории упругости ......................................... 4
1.1.2. Общие подходы к решению задач теории упругости .................... 6
1.2. Разрешающие уравнения изгиба тонких пластин ................................. 10
1.2.1. Общие положения и классификация пластин ................................ 10
1.2.2. Перемещения и деформации в пластине ........................................ 12
1.2.3. Напряжения и усилия в пластине ................................................... 13
1.2.4. Дифференциальное уравнение изгиба пластины ........................... 17
1.2.5. Формулировка граничных условий ................................................ 19
1.3. Решение задач изгиба прямоугольных пластин ................................... 23
1.3.1. Элементарные случаи изгиба пластин ........................................... 23
1.3.2. Решение прямой и обратной задач изгиба пластин ....................... 27
1.3.3. О расчете ортотропных пластин и пластин на упругом
основании ......................................................................................... 32
Глава 2. МЕТОДЫ ПРИБЛИЖЕННОГО РЕШЕНИЯ
ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ИЗГИБА ….. ................................ 38
2.1 Расчет пластин методом конечных разностей ....................................... 39
2.1.1. Конечно-разностный оператор дифференциального уравнения
изгиба ............................................................................................... 40
2.1.2. Учет граничных условий ................................................................. 43
2.1.3. Вычисление внутренних усилий и напряжений ............................ 46
2.1.4. Пример расчета изгибаемой пластины МКР .................................. 47
2.2. Метод Бубнова – Галеркина …............................................................... 53
2.2.1. Основные положения метода Бубнова – Галеркина ...................... 53
2.2.2. Базисные функции ........................................................................... 57
2.2.3. Пример расчета прямоугольной пластины .................................... 60
Глава 3. ВАРИАЦИОННЫЕ МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ......................... 67
3.1. Вариационная постановка задачи изгиба пластины ............................. 67
3.2. Вариационно-разностный метод ........................................................... 71
3.3. Метод Ритца – Тимошенко .................................................................... 74
3.4. Метод конечных элементов ................................................................... 77
3.4.1. Основные положения метода конечных элементов ....................... 77
3.4.2. Прямоугольный конечный элемент изгибаемой пластины ........... 81
3.4.3. Основные соотношения для конечного элемента пластины ......... 84
3.4.4. Алгоритм расчета методом конечных элементов .......................... 87
3.4.5. Пример расчета изгибаемой плиты МКЭ ....................................... 94
Глава 4. ОСНОВЫ ТЕОРИИ РАСЧЕТА ОБОЛОЧЕК .................................. 100
4.1. Общие положения о расчете тонких оболочек ................................... 100
4.1.1. Основные понятия и определения ................................................ 100
126
4.1.2. Деформации и усилия в тонких оболочках .................................. 103
4.1.3. Частные теории расчета тонких оболочек ................................... 107
4.2. Расчет тонких пологих оболочек ......................................................... 109
4.2.1. Уравнения равновесия пологой оболочки ................................... 109
4.2.2. Разрешающая система уравнений и граничные условия ............ 112
4.3. Приближенное решение задач теории оболочек ................................ 116
4.3.1. Общие сведения о численных методах расчета оболочек............ 116
4.3.2. Применение МКЭ к расчету оболочек ......................................... 120
Библиографический список ............................................................................ 125
Учебное издание
Лукашевич Анатолий Анатольевич
ТЕОРИЯ РАСЧЕТА
ПЛАСТИН И ОБОЛОЧЕК
Учебное пособие
Редактор
Корректор
Компьютерная верстка
127