~
412
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS-I. FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 40, NO. 6, JUNE 1993
On the Optimization of MOS Circuits
Jiabi Zhu, Student Member, IEEE, and Mostafa Abd-El-Barr, Senior Member, IEEE
Abstract-Optimizing the number of transistors in a complex
MOS gate is significant for minimizing chip area and delay in
VLSI designs. Unfortunately, such optimization process is an NPC problem. The worst case computational complexity of graphoriented algorithms used in existing approaches is exponential in
the number of transistors. In this paper, we address this problem
through the use of bridging switches. We propose a theory
and an algorithm for optimization of MOS switch networks
using an edge-merging technique. The worst case computational
complexity of the heuristic algorithm proposed is O ( n 5 e 2 ) where
,
n is the number of nodes and e is the number of edges in the
switch network.
4 Vdd
Inputs
a
n-net
(a)
I. INTRODUCTION
p-net
S
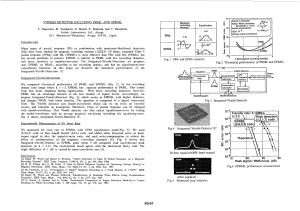
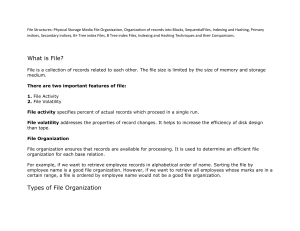
WITCH network design is an important synthesis method
for MOS circuits. In this method, a Boolean expression is
converted into a complex gate which consists of one or more
switch networks as shown in Fig. 1. An MOS transistor can
be modeled as a voltage-controlled switch as shown in Fig. 2.
It can also be modeled as a labeled edge in a graph. When
the input variable corresponding to the label on the edge is
1 (high level), connection between the two end nodes of the
edge is established. In this way, a logic function is represented
using transistor network(s) such that for some input variable
combinations there is at least one path between two ports
(called the drain and the source which correspond to ports
D and S in Fig. 1, respectively) of the net, while for the other
input combinations there is no path between these two ports.
The AND function is presented as serial edges between the drain
and the source, while the OR function is presented as parallel
edges, as shown in Fig. 3.
Some logic functions can be implemented using fewer
number of transistors in the nonseries-parallel structure. The
edges connecting some intermediate nodes of two (or more)
paths are called bridges. For example, the logic function
Inputs
n-net
Pre-charge
4
F = ab + ade + cd + bce
whose graph representation is shown in Fig. 4(a) can be
implemented using the simpler logic function whose graph
representation is shown in Fig. 4(b). The latter circuit requires
only 5 transistors, as compared to 8 transistors if the network
corresponding to Fig. 4(a) was used (a 37.5% reduction in the
number of transistors).
Optimization of the number of transistors in a circuit is
significant, because a smaller number of transistors usually
leads to a smaller chip area. There exists a number of optimization methods for MOS circuits [ 11-[7]. However, no one
Manuscript received June 9, 1992; March 3 , 1993. This paper was recommended by Associate Editor J. Choma, Jr.
The authors are with the Department of Computational Science, University
of Saskatchewan, Saskatoon, Sask., Canada S7N OWO.
IEEE Log Number 9209004.
(d)
Fig. I .
Four types of MOS circuits. (a) nMOS. (b) Full CMOS. (c) Dynamic
CMOS. (d) Pass-transistor model.
method ensures that the resultant switch network is always
minimal, and also the computational complexity of most
existing methods and algorithms is prohibitively high.
In this paper, we propose a theory and the corresponding
algorithm for optimization of switch networks. The worst case
computational complexity of our algorithm is O ( n 5 e 2 )where
,
n is the number of nodes and e is the number of edges in the
networks. Experimental results are reported in Section V.
1057-7122/93$03.00 0 1993 IEEE
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
ZHU AND ABD-EL-BARR: OPTIMIZATION OF MOS CIRCUITS
413
with more than one term are not considered in Dietmeyer’s
algorithm. Brayton and Rude11 [2], [3] suggest kernels, which
are formed by more than two terms, as divisors to improve
gar
inputx the results obtained by Dietmeyer. For instance, ac d is
I
a kernel of F (shown above). Written in quotient-divisor
source
I
form, F = ( b
representation
e ) ( a c d ) is optimized as 5 literals.
n-channel transistor
switch or contact
in graph
Garuso [4] developed an algebraic factorization method in
Fig. 2. n-channel transistor and its equivalent switch.
which a factored expression of the given two-level function
is obtained as a disjunction of factored expressions of smaller
subfunctions. The results reported in [4] are better than those
reported before.
The factorization approach is suitable for implementing
Boolean functions using multilevel gate circuits. This is because this method always results in tree-like structure exAND
OR
pressions. Although factorization approach has been used to
Fig. 3 . Circuits and graph representations of AND and OR
optimize switch networks, it cannot produce nonseries-parallel
structures. The edge-merging approach is more general than
some
the factorization approach because it can synthesize switch
networks which use bridging switches.
The edge-merging approach is a graph-oriented method
[5]-[7]. In this approach, each literal in a term of a Boolean
expression is counted as one edge. A procedure is then used
to merge any pair of edges which have a common node and
the same literal in the graph representation of the net. A
check is then conducted to see whether this merge is valid.
A valid merge is defined as one which does not change the
logic function represented by the net. If the merge is valid,
then several edges are merged; otherwise, the merge is not
performed. The steps of the algorithm are as follows [6].
Step 1: Form a switch network in which each symbol in a
dnin
dnin
term of the given Boolean function is realized by an edge.
Step2: For each pair of edges which correspond to an
(b)
Fig. 4. Optimizing switch net with bridge. (a) Series-parallel structure. identical variable (a variable and its complement are counted
(b) Bridge structure.
as different variables), perform the following steps:
Step 2.1: If the pair of edges do not have a common
node,
perform edge-changing two-terminal two-isomorphic
11. EXISTING
METHODSFOR MINIMIZING
SWITCHNETWORKS
transformations to make them connected together. If the pair
There are two main approaches reported in the literature of edges cannot joint together, Step 2.2 is skipped.
for optimization of MOS circuits: factorization [ 11-[4] and
Step 2.2: Merge the pair of edges into an edge and check
edge-merging [5]-[7].
the .function represented by the merged network against the
The use of factorization approach results in a (near) min- given switchfunction. If they are the same, the merge is valid;
imum factored expression for a given function using some otherwise the pair of edges cannot be merged.
heuristic algorithms. For example, the function F = abc
Example I : Suppose it is required to optimize the function
ace bd de can be factorized into F = (ac d ) ( d e ) . F given by
Only five transistors are required for the implementation of
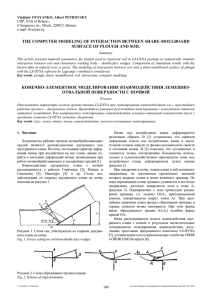
F = ABGD+ ABC+ ABD + Z B D + Z B D .
the factorized form of the function, compared to 10 transistors
if the original form of F is implemented.
According to Step 1, a switch network is formed as shown
The basic idea of factorization algorithms is that a divisor in Fig. 5(a) in which each edge corresponds to a literal in
of the function F to be factored is singled out, then F is the original function. Because three edges labeled A and two
divided by this divisor. Such procedure is recursively applied edges labeled are connected together, Step 2.2 is performed.
to the remainder. Computing time and factorization quality The three edges labeled A are merged, and the function of
depend on the strategy of selecting divisors. Dietmeyer [ 11 the merged network is compared with the original function.
seeks, as a divisor, a factor having the largest figure of merit. Because these two functions are the same, the merge is
This is defined as the product of the number of literals in valid. Similarly, the two edges labeled 2 are merged. The
the factor by the number of terms, in F , which holds it. resultant network is shown in Fig. 5(b). The process is now
For example, function F = abc ace bd
de contains repeated starting from Step 2.1. The two edges labeled B
10 literals. Using Dietmeyer’s algorithm, F is factorized as and three edges labeled B are made connected together by
F = ac(b e ) d ( e b ) with 7 literals. However, factors using transformations, as shown in Fig. 5(c). Merge the B
drain
+
+
r
n
+ +
+
+
+ +
+
+
+
+ +
+
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS-I:
414
FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 40, NO. 6, JUNE 1993
S(source)
B
3
E
8
D
D'
A'
B'
(b)
Fig. 6. Effect of merging of edges. (a) Case 1. (b) Case 2.
5
E
8
A'
B'
D
the validation checks performed in step 2.2 can be avoided,
and hence the computational complexity can be reduced. In
this paper, we propose a synthesis theory and an algorithm
which can be used to achieve such a goal.
D'
E@
8
A'
(d)
Fig. 5.
Edge-merging approach.
and B edges, respectively, and verify the function of merged
network. The network of the optimized function is shown in
Fig. 5(d). The number of transistors required to implement
the optimized function is 10, compared to 16 if the original
function is implemented.
The task of "checking the function realized by a network,"
as required by Step 2.2, is difficult to implement. It is
equivalent to verifying all the paths in the graph. The worst
case complexity of an algorithm to verify all paths in a graph
with e edges is 0(2"/'). A heuristic strategy is difficult to
use here because all involved paths have to be verified. One
possible solution to the prohibitive computing complexity of
this approach is to use the decomposition technique presented
in [8]. However, the partitioning may destroy the relationship
among the edges, and may change the structure of the graph
so that the optimal solution will never be found.
On the other hand, if an algorithm is used whereby only
those edges which can be validly merged are considered, then
111. THECONCEPTS AND THEORY FOR VALID EDGE-MERGES
A modification to the graph representation of a switch net
may, or may not, affect the logic expression realized by the
net. For example, suppose that the literals of edges (A, B)
and (A, C ) in Figs. 6(a) and (b) are the same, say x, where
A . B . C, and N are nodes in the graph representation of the
net. If we combine (A. B)with ( A . C), by merging nodes B
and C, no path will be affected in Fig. 6(a). We call such
merge, a valid merge. However, if we apply the same merging
to the graph representation in Fig. 6(b), path S B A C D will
be shortened to S B D (or S C D ) , and literal x corresponding
to edges (A. B ) and ( A , C ) will be removed from the path,
i.e., the function of the switch net in Fig. 6(b) will change
due to merging edges ( A , B ) and (A, C ) ;hence such merge
is invalid.
Dejinition I : Paths p1 and p 2 are said to be a pair of crossed
paths if the same node N exists on both paths; otherwise, p l
and p z are said to be a pair of noncrossed paths.
The concept of crossed paths is illustrated in Fig. 7. In this
figure, p l ( S - N - A ) and p z ( D - N - B) in Fig. 7(a) are
crossed paths, while p j ( S - C) and p 4 ( D - E ) in Fig. 7(b)
are noncrossed paths.
Dejinition 2: Nodes A and B are said to be a pair of
divergent nodes if there is noncrossed path pair p l and p 2 ,
such that path p l is between node A and the source (or the
drain), and path p2 is between node B and the drain (or the
source); otherwise, nodes A and B are said to be a pair of
convergent nodes.
In Fig. 7, paths p l and p 2 are crossed, while paths p 3 and
p4 are noncrossed. Therefore, nodes A and B in Fig. 7(a) are
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
415
ZHU A N D ABD-EL-BARR: OPTIMIZATION OF MOS CIRCUITS
(b)
(b)
Fig. 7. Crossedhoncrossed path pair and convergent/divergent node pair.
(a) Crossed path pair and convergent node pair. (b) Noncrossed path pair and
divergent node pair.
Fig. 8. Redundant path. (a) The circuit. (b) Graph representation
convergent node pair while nodes C and E in Fig. 7(b) are
divergent node pair.
Dejinition 3: If there is a convergent node pair on a path,
then that path is said to be redundant, and the part of the path
in which the convergent node pair exists is called redundant
part; otherwise the path is said to be nonredundant.
In Fig. 8 , nodes A and B are convergent node pair, therefore the path S N A B N D is redundant. The logic expression
represented by the graph in Fig. 8 is completely determined
by subgraph S N D , and is independent of subgraph N A B N ,
i.e., part N A B N is redundant. This implies that we can do
any modification within part N A B N without affecting the
expression represented by the graph.
Dejinition 4: Consider subgraph GI = ( N I . E’) of graph
G, where N‘ is a node set, and E’ is an edge set. Path p
is said to be independent of subgraph GI, if the following
operations do not change the logic expression associated with
path p which exists between the source and the drain of graph
G:
1) deletion of edge e, for any E E’ and/or
2) addition of edge e, for any e = ( n I ,7 1 , ) . where 1 1 , and
ri, E
NI.
It should be noted that only the deletion and/or addition of
an isolated node (a node that is connected to no edges in a
graph) will not change the logic expression represented by a
graph. Notice also that a path between the source and the drain
is independent of its redundant part. For example, in Fig. 8 the
path between S and D is independent of the redundant part
N A B N . In what follows we will use “a path is independent
of a set of edges” and “a path is independent of subgraph GI”
to mean the same thing.
Lemma 1: If node A and node B are convergent node pair
in graph G, then any path between the source and the drain
of graph G is independent of the edge(s) between node A and
node B , regardless of whether nodes A and B or either of
them is on a given path.
Proofi Consider a path p between the source and the
drain. There are two cases.
Fig. 9.
Illustration of Lemma 2
Case 1: Both node A and node B are on p . Because A
and 8 are convergent, p is redundant and the edge(s) in
set E = ( P , I e L = ( A . B ) } constitute a redundant part.
Therefore, the logic expression represented by p is independent
of E .
Case 2: None of A and B or only one of them, is on p. In
this case, no edge among E is part of p . Therefore the logic
expression represented by p is independent of E .
[Q.E.D.]
As an example, consider the network graph representation
shown in Fig. 8. The removal of the convergent nodes A and
B or the insertion of a new edge between them will not change
the logic expression of the network.
Dejinition 5: Ports of a subgraph G I with respect to path
p are defined as the nodes in G1 through which p enters to
or leaves from GI.
In Fig. 9, node A and B are the ports in G I with respect
to p , where p consists of p 1 and 112.
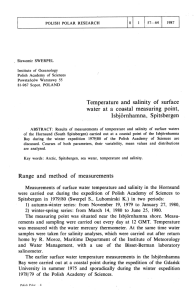
Lemma 2: Consider the graph representation of a network
as shown in Fig. 9. Let node set N = ( N , } is such that there
exist edges e: = ( N , . A ) and e:/ = (N,. B ) connecting N ,
with both nodes A and B . Assume that nodes A and B are
convergent in the absence of edge set E1 = { e , I e , = (N,. A )
or P , = ( N , , B ) , for all N , E N } . If A and B are the only
two ports in G1 = ( N U { A , B } , El U Ez) for path p , where
edge set E2 = (e* I e* = ( A , B)}, then path p between the
source and the drain is independent of the subgraph GI.
Proofi Because A and B are the only two ports in G1
for p , when El U E2 are taken away, p is divided into two
part p l and p 2 . However, in absence of El and since A and
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS-I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 40, NO. 6, JUNE 1993
416
c
N2
dh/
Fig. 10. Example of Lemma 2.
(b)
(b)
Fig. 1 1 .
Illustration of Lemma 3. (a) Before modification. (b) After
modification.
B are convergent, p l and p z must meet at a node no $! N .
Therefore the edges of p in El U E2 are the redundant part of
p. Therefore p is independent of G1.
[Q.E.D.]
Consider the graph representation shown in Fig. 10. The
path between the drain and the source via node C is independent of the edges ( N I ,A ) , ( N I ,B),(N2, A ) , and ( N 2 ,B ) .
That is, the logic expression associated with the path would
not change if some of these edges were removed or if even
some new edges were added among nodes N I , N2, A, and B.
Lemma 3: Consider the graph representation of a network
as shown in Fig. 1 l(a). Let edge sets E’ = {e: 1 e: = ( A , B ) } ,
E” = {e: I e: = ( A , C ) } , and E* = {e* 1 e* = ( B , C ) } .
Assume that nodes B and C are convergent node pair in the
absence of E’ and E”. If for every e: E E’ (e: E E”), there
exists an e: E E” ( e l E E’) such that the literals of e: and e;
(e: and e>j are the same, then node C can be merged together
with node B, and E” and E* can be removed, as shown in
Fig. 1 1(b), without affecting the logic expression represented
by the graph.
Before proving this lemma, let us informally explain its
meaning first. In the assumption, the edges between nodes A
and B are same as the edges between nodes A and C. The
assumption that “nodes B and C are convergent node pair in
the absence of E’ and E“” means that one need not to worry
about the paths from node B to node C , as proved in Lemma 2.
Proof: From Lemma 2 we know that the paths which
enter and leave G I = ( { A , B , C } , E’ U E” U E * ) through
nodes B and C are independent of G1, so we need not consider
these paths. What we need to prove then is to show that
the paths which enter and leave G1 through A-B, and A-C
remain unchanged if edge sets E’ and E” are merged together.
Fig. 12. Example of a redundant node ( A ) . (a) Before modification.
(b) After modification.
For the nonredundant paths passing through A and B , there
are two routes: A-B, and A-C-B. Since the logic expression
of paths A-B is the same as that of paths through A-C, then
the logic expression of path A-B combined with path A-C-B
is the same as that of path A-B. That is, we need not consider
path A-C-B. Because the edges { ( A , B ) } remain unchanged,
the logic expression of the paths through A and B remain
unchanged after B and C are merged. Similar argument can
be stated about path A-B-C. Therefore, the literals of the
paths A-C remain unchanged after C is merged with B , and
[Q.E.D.]
hence the merging of B with C is valid.
Lemma 3 allows the removal of the redundant edges in E”
and E*.
Dejinition 6: Consider the graph representation shown in
Fig. 12(a). Node A is said to be redundant, if for every edge
from A, for example, e: = ( A , C;), where Ci is a node,
C; # A , and C; # B, there exists an edge e: = ( B , C;)
such that the literals of e: and e r are the same.
Lemma 4: A redundant node (e.g., node A in Fig. 12(a))
and its associated edges can be removed without affecting the
function of the net (see Fig. 12(b)).
Proof: Consider subgraph G1 = (N, E) in graph G,
where node set N = { A , B } U {C;} and edge set E = {e 1
e = ( A , B ) or ( A , C;) or ( B , Ci),for all Ci}, as shown in
Fig. 12(a). From the assumption we know that all the edges
connected to A and B are in E, and that any path between
the source and the drain of graph G can enter and leave G1
only through node Ci, i.e., {Ci} is the set of ports of G I .
Consider a path passing through Ci and Cj where Ci # Cj.
There are two routes between C;and Cj, i.e., C;-A-Cj and
Ci-B-Cj. From the definition of a redundant node, we know
that the literals of these two paths are the same. Therefore, we
[Q.E.D.]
can validly remove A and its associated edges.
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
ZHU AND ABD-EL-BARR: OPTIMIZATION OF MOS CIRCUITS
417
(b)
(b)
Fig. 13. Modifying the switch net into bridge structure. (a) Before modifying.
(b) After modifying.
The following lemma allows us to obtain optimized switch
nets using bridges.
Lemma 5: Consider a graph GI = ( N , E) where the set of
nodes N = { A , B , C, D } and the set of edges E = El U E2,
as shown in Fig. 13. Suppose that El = {el, ez, e3, e4}
C)}, where el = ( A , B ) , e2 =
and E2 = {e, I e, = (B,
( B , D ) , e3 = ( A , C), and e4 = (C, D ) . Let the literals of
e l , e2, eg, and e4 are x, yz, xy and z , respectively. Assume
that B and C are convergent node pair in the absence of E l ,
then G1 can be reduced into G’, = ( N , E’), as shown in Fig.
13(b), where E’ = {el, e4, e5} U E2, e5 = ( B , C), and the
literal of e5 is y (the common literal between e2 and e3).
Proot From Lemma 2 we know that any path which
enters and exits GI through B and C is independent of GI.
So what needs to be done is to prove that the paths which
enter and exit G1 through A and D , A and B , A and G, B
and D , and C and D are independent of GI. Because of the
symmetry, it is sufficient to consider only the paths entering
and leaving G1 through A and D , A and B,and A and C.
The path entering and leaving G1 through A and B in G1
remains unchanged in G’,. The path which passed through A
and C in GI will pass through el and e5 in G:. The literals
o f ~ t h epath, xy, remain unchanged in G’,.
Now consider the path which enters and exits GI through
A and D. There are two routes for nonredundant paths:
1 ) el-eg-eq, where eo E Ea. These paths remain unchanged in G:.
2 ) e1-e2 or e3-e4. These paths are changed into el-es-eq
in G’, . Their literals, however, remain unchanged, i.e.,
xyz.
[Q.E.D.]
In the general case, x, U, and z can be one or more literals,
and node A and node D can be the same node, as shown in
Fig. 14(a). In the latter case, edges e2 and e3 can be reduced
into edge e5, as shown in Fig. 14(b). An example for the
application of Lemma 5 is shown in Fig. 15.
Fig. 14. Example of a 3-node bridge. (a) Before modifying. (b) After
modifying.
Fig. 15. Example of application of Lemma 5. (a) Original circuit. (b)
Optimized circuit.
IV. PROPOSED ALGORITHM
FOR
OPTIMIZATION
OF SWITCHNETS
In this section, we propose an algorithm for optimization of
switch networks. A basic step in the optimization process is to
verify the ConvergentJdivergent relationship between any pair
of nodes in the graph representation of a given function. The
worst case computing complexity of an exhaustive algorithm
for this problem is 0(2e/2), where e is the number of edges
in the graph. This is because all paths from all nodes to the
source and the drain should be checked.
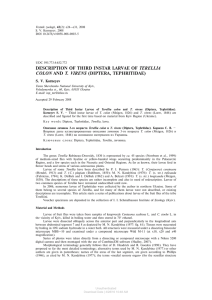
We introduce a heuristic algorithm, using procedure Relationship as shown in Fig. 16, to address such problem. The
basic idea of this algorithm is that when we verify convergenvdivergent relationship between two nodes, we identify a
path pl (PATH1 in Fig. 16) from a node n1 (node1 in Fig. 16)
to the source and another path p2 (PATH:! in Fig. 16) from
another node n2 (node2 in Fig. 16) to the drain. If these two
paths are noncrossed (see Definition I), then the nodes are
divergent. Otherwise, we try to modify these crossed paths
such that they become noncrossed. This modification can be
done by decoupling a node which belongs to the two paths
from at least one of these paths (see Fig. 17). In this figure, the
common node no (node0 in Fig. 16) belongs to both paths pl
and pa. Part (b) of the figure shows how to decouple this node
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
~
418
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS-I: FUNDAMENTAL THEORY AND APPLICATIONS,VOL. 40, NO. 6, JUNE 1993
Relationship(node1, node2)
(IF(must-intersect(node1 ,source,node2,drain)==TRUE
AND must-intersect( node2,source,nodel ,drain)==TR UE)
THEN
ELSE
RETURN(C0NVERGENT);
RETURN(UNDETERM1NED);)
must_intersect(node, ,source,nodep,drain)
(Reset the marks of all nodes:
Find a path from node, to the source:
IF(the path does not exist) THEN RETURN(TRUE);
Find a path from node2 to the drain:
IF(the path does not exist) THEN RETURN(TRUE);
undetermined-flag=O;
FOR(nodeo E common nodes on both paths--updated)DO(
Mark nodeOas PATH2;
Find a path from node, to the source (with the nodes other than marked PATH2);
IF(the path does not exist) THEN(
Mark nodeOas PATH1:
Find a path from node2 to the drain (with the nodes other than marked
PATH1);
lF(the path does not exist) THEN
IF(undetermined-flag==O) THEN
RET URN(T R U E) ;
E LSE RET URN(UN DETERMINED));
ELSE ( Mark nodeOas PATHl :
Find a path from node2 to the drain (with the nodes other
than marked PATH1);
IF(the path exists) THEN undetermined-flag=l :
ELSE mark nodeOas PATH2;
1
1
ELSE
undetermined-flag=l ;
1
RETURN(FALSE);}
Fig. 16. Algorithm for finding the relationship between a node pair.
from p l . If such modification is possible, then we conclude
that the nodes are divergent; otherwise, they are convergent.
If there are more than one common nodes between p l and
p 2 , as shown in Fig. 18, the case will be much more involved.
Suppose that in the first iteration, pl = (nl, c1, c2, e , S )
and p2 = ( 1 2 2 , a, C I , cp, D),as shown in Fig. 18(c). There
are two common nodes c1 and c2 between paths p l and p 2 .
According to the algorithm shown in Fig. 16, the common
nodes are marked as belonging to either p l , or p 2 , or none
(three choices). If c1 were arbitrarily marked as belonging to
p a , then c2 could be marked as belonging to p ~ and
, paths
p l = (711, b, e , S) and p 2 = ( 7 ~ 2 a, , c1, c2, D ) become not
crossed as shown in Fig. 18(d). If, however, c1 is arbitrarily
marked as belonging to pl (see Fig. 18(c)), then the next step is
to mark ca. If c2 can be marked as belonging to one or none of
p l and p a , then we know that 7 ~ and
1
n2 are divergent. But if c2
cannot be marked, as shown in Fig. 18(e), then the relationship
between nl and 712 cannot be determined, and the other two
possible choices for marking c1 have to be considered one at
a time.
In the general case, suppose that there are m common nodes,
then there will be 3m choices for marking these nodes. To
speed up the algorithm, each common node is considered only
once thus limiting the computing complexity to O(m).
The node pair which the algorithm verifies as “UNDETERMINED’ (see lines 5 and 23 in Fig. 16) may be divergent,
or they may be convergent. In this case, we cannot use
Lemmas 3 and 5 to optimize the network. This will cause the
algorithm to sometimes produce suboptimal results. However,
the operations performed by the algorithm are always valid.
The computational complexity of loop FOR (line 13 in Fig.
16) in “must-intersecto” is O ( n ) ,where n is the number of
nodes. In that loop the complexity of finding a path from
a node to the source (or the drain) is O ( e ) , where e is
the number of edges. Therefore, the complexity of verifying
ConvergenVdivergent relationship is O(ne).
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
419
ZHU AND ABD-EL-BARR: OPTIMIZATION OF MOS CIRCUITS
fDra’”
d Source
(a)
t
Dra’n
(b)
Fig. 17. Finding the relationship between two nodes. (a) First step: find 1’1
and 1’2. (b) Second step: Decouple common node i t ” .
The algorithm shown in Fig. 19 makes use of the above
algorithm, and is used to minimize MOS switch networks.
This algorithm uses a “greedy strategy.” When more than one
optimizing situations are available at a given step, the merge
which causes the largest number of literals to be removed
is performed. This strategy helps preventing the optimization
process from being stuck in a “local minima.”
In optimizing the number of transistors, two other heuristic
strategies are used. In the first one, higher priority in selecting
the paths to be merged is given to longer path (paths with
more literals). This strategy will cause all paths in the network
to have comparable lengths during optimization. The other
strategy considers the ratio of the number of literals of a path to
be merged to the total number of literals of that path such that
edges will not be broken into too small pieces. For example,
merging 2 literals of an edge which has 3 literals in total is
given higher priority than merging 2 literals of an edge with
5 literals.
The computing complexity of each step in the algorithm
shown in Fig. 19 is listed in Table I. In the worst case, the
computational complexity of this algorithm is 0 ( n 5 e 2 ) .
v.
IMPLEMENTATION AND RESULTS
The algorithm presented above was implemented on a SunSparc 2 workstation using C language under Unix operating
system. The input of the algorithm is the graph representation
of logic function obtained using Quine-McCluskey algorithm
[9]. We offer the following example to illustrate the use of the
proposed algorithm to minimize MOS networks.
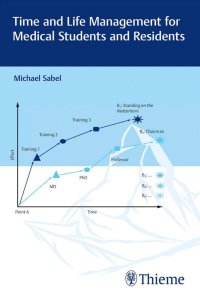
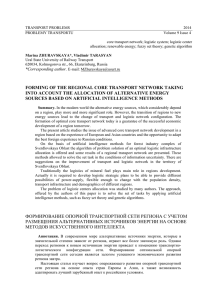
Example 2: Suppose that it is required to implement the
function
F = abzf
+ abh + aceg + abce + bc&f + bcdh + deg + bde.
1”
(e)
Fig. 18. Case in which there are two common nodes. (a) Original circuit.
(b) Graphical representation of the circuit. (c) Paths 1’1 and p 2 found in the
first iteration. (d) If c1 is assigned to p r . p1 should detour c1. (e) Because
c1 is assigned to p 1 , 1’2 should detour c1.
TABLE 1
COMPUTING COMPLEXITY OF THE
ALGORITHM
..........................................................
STEP 1
STEP 2
The original switch net without any minimization is shown in
Fig. 20. The corresponding graph is shown in Fig. 21(a). The
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
420
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS-I:
FUNDAMENTAL THEORY AND APPLICATIONS. VOL. 40. NO. 6. JUNE 1993
STFP 1: Find the redundant edge set which contains the
maximum number of edges, and merge them. Repeat this
procedure until no redundant edges can be found.
STEP 2: Find the redundant node which involves the maximum
number of edges, and remove it and its related edges (using
Lemma 4). Repeat this procedure until no redundant nodes can
be found.
STFP 9: Find a sub-graph which satisfies the condition in
Lemma 5, and change it into a bridge-based structure (using
lemma 5). Repeat this procedure until no such sub-graph can be
found.
) Until (no further optimization can be obtained);
Fig. 19. Algorithm for minimizing MOS switch net
function name
Example 2
f4
fs
_f 6f13
number of transistors
results in [4]
results in [lo]
QUICK-FACTOR alg. FACT alg.
results of
this paper
C P U time (sec)
using
our algorithm
-
-
10
10
< 0.01
69
33
36
38
58
29
35
38
58
28
32
38
56
28
32
0.58
0.25
0.33
0.17
optimization process based on Lemmas 3 and 4 is shown in
Fig. 21(a)-(d). Based on Lemma 5, a bridge can be formed,
as shown in Fig. 21(d)-(e). The optimized circuit is shown
in Fig. 22.
The algorithm has been applied to five of the example
functions given in [4] and [ 101. The results obtained are listed
in Table 11. The average number of transistors obtained using
our algorithm is fewer than those obtained using the algorithms
in [4] and [lo]. It should be noted that the algorithm in [4] is
specifically for series-parallel networks, and cannot produce
nonseries-parallel networks. Our algorithm can produce both
series-parallel and nonseries-parallel networks. Therefore, the
method proposed in this paper is also suitable for synthesis
of multilevel gate circuits. The graph representation of circuit
f4” from [4] and that obtained using our algorithm are shown
in Fig. 23, where the numbers on the edges are used to identify
literals in the function.
“
REMARKS
VI. CONCLUDING
Minimizing the number of transistors in a complex MOS
gate is significant for VLSI implementations. Unfortunately,
this process is an NP-C problem. Edge-merging algorithms
used in existing techniques has an exponential time complexity. In this paper, we propose the concepts and a theory
governing the optimization of MOS net using only valid
operations. A heuristic algorithm with a worst case time
complexity of O(n5e2),where n is the number of nodes and
e is the number of edges in the switch network, is given.
I
I
36
I
source
Fig. 20. Original switch net for Example 2 (30 transistors).
Examples illustrating the quality of the results obtained using
the proposed algorithm are reported.
It should be pointed that some improvements can be made to
the algorithm to keep some special optimal results from being
ignored. For example, in Fig. 6(b), if edge ( B , S) or (C, D )
contains literal ‘‘2,”then the merging of node B with node
C is valid. Another example is that if edge ( B , S) contains
literal “y” while edge (C, D )contains literal ‘‘3’’in Fig. 6(b),
the merging of node B with node C is also valid. Lemmas 2,
3, and 5 can be modified such that these cases are considered.
However, when there is more than one path from node B to
the source and/or from node C to the drain, the computational
complexity of verifying the above cases may be prohibitively
high. A tradeoff between the computational complexity and
the optimization quality is thus made in the algorithm.
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
~
42 1
ZHU AND ABD-EL-BARR: OPTIMIZATION OF MOS CIRCUITS
Drain
0
a
Lde
L
Source
SO”],
Fig. 22. Bridge net for Example 2 (10 transistors).
Drain
0
f
4
2
de
I
de
Drain
NO (drain)
I
Source
(d)
Drain
20:
n
a
Graph representation of circuit f4. (a) Result from [4].
(b) Result optimized using the algorithm in this paper.
d
1
Source
(e)
Fig. 21.
(b)
Fig. 23.
Optimization process applied to Example 2.
Since heuristic strategy is used in finding the relationship
among nodes, the algorithm proposed in this paper may give
suboptimal results in cases where the circuits (graphs) have too
many “common nodes” bewteen pl and p2 (see Section IV).
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.
422
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS-I:
It is well known that performance concerns limit the number of series pull-up and pull-down transistors in practical MOS networks. This problem can be solved through a
modification of the edge-merging methods as follows. The
networks optimized by edge-merging methods can be decomposed into series-parallel parts and nonseries-parallel parts.
The series-parallel parts can be mapped into multilevel gate
circuits if charge-sharing in these parts is a problem. Only the
nonseries-parallel parts should be implemented using complex
gates.
FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 40, NO. 6, JUNE 1993
computing, VLSI layoi
Jiahi Zhu (S’92) received the B.Eng. degree in
computer science and engineering and M.Eng. degree in electrical engineering from Tsinghua University, Beijing, People’s Republic of China in 1985
and 1990, respectively, and the M.Sc. degree in
computer science from University of Saskatchewan,
Saskatoon, SK, Canada, in 1992.
Following his graduate studies, he joined SED
System, Inc., in Saskatoon, designing products of
low-level network protocol conversion for satellite
communication. His interests are in fault tolerant
circuit optimization, and computer networks.
REFERENCES
D. L. Dietmeyer, “Logic design automation of fan-in limited NAND
networks,” IEEE Trans. Compur., vol. C-18, pp. 11-22, Jan. 1969.
R. K. Brayton, R. Rudell, A. Sangiovanni-Vincentellim,and A. Wang,
“Multilevel logic optimization and the rectangular covering problem,”
in Proc. ICCAD-87, Nov. 1987, pp. 66-69.
R. K. Brayton, “Factoring logic functions,” IBM J. Res. Develop., vol.
31, no. 2, pp. 187-198, Mar. 1987.
G. Caruso, “Near optimal factorization of Boolean functions,” IEEE
Trans. CAD, vol. 10, no. 8, pp, 1072-1078, Aug. 1991.
D. L. Dietmeyer, Logic design ofdigird sysrems.Allyn and Bacon, 197 1.
M. Wu, W. Shu, and S. Chan, “A unified theory for MOS circuit design
switching network logic,”Int. J. Electron., vol. 58, no. I , pp. 1-33, 1985.
Z. Kohavi, Swirching and Finite Automata Theory. New York:
McGraw-Hill, 1970.
M. Dagenais, “Efficient algorithmic decomposition of transistor groups
into series, bridge, and parallel combinations,” IEEE Trans. Circuits
Syst., col. 38, no. 6, pp. 569-581, June 1991.
E. McCluskey, Logic Design Principles. Englewood Cliffs, N.J.:
Prentice-Hall, 1986.
Y. Xu and M. Abd-El-Barr, “Switch-level minimization of logic functions,” submitted for publication.
Mostafa H. Ahd-El-Barr(M’WSM’M)) received
the B.Sc. and M.Sc. degrees in electrical engineering
in 1973 and 1979, respectively, from Cairo
University, Egypt, and the Ph.D. degree in electrical
engineering (computer group) from the University
of Toronto, Ont., Canada, in 1986.
In 1986 he joined the Faculty of the Department of Computational Science, University of
Saskatchewan, Saskatoon, Canada. where he is
currently a Professor. He is also an Associate Member of the Deoartment of Electrical Engineering
at the same University. His research interests include VLSI design and
implementation of algorithms, CMOS testability, fault-tolerant computing, and
multiple-valued logic systems design. He is the author and/or the coauthor
of more than SO scientific articles published in journals and symposia
proceedings. He has served and/or is currently serving on a number of
technical committees for conferences and symposia including the International
Symposium on Multiple-valued Logic (ISMVL), and the Midwest Symposium
on Circuits and Systems. He is a member of the ACM.
Authorized licensed use limited to: Ben-Gurion University of the Negev. Downloaded on August 26,2020 at 09:17:00 UTC from IEEE Xplore. Restrictions apply.