Лекция 4
Кинематические характеристики
механизмов
Кинематика входных и выходных
звеньев и передаточные функции
механизма
1
Число независимых друг от друга кинематических
параметров механизма с заданными структурной схемой и
размерами его звеньев равно числу степеней свободы
механизма или числу обобщенных координат механизма.
2
3
Звено, которому приписывается одна или несколько
обобщенных координат, называют начальным звеном.
Например, звено 1, вращающееся вокруг неподвижной точки,
т. е. образующее со стойкой 2 сферическую кинематическую
пару (рис. 3.1, а), имеет три степени свободы и его положение
определяется тремя параметрами — тремя углами Эйлера: φ1,
ψ1, θ1. Звено 1, вращающееся вокруг неподвижной оси, т. е.
образующее со стойкой 2 вращательную кинематическую пару
(рис. 3.1,б), имеет одну степень свободы и его положение
определяется одним параметром, например угловой
координатой φ1. Звено, перемещающееся поступательно
относительно стойки (рис. 3.1, в), имеет также одну степень
свободы и его положение определяется одним параметром координатой Xв.
4
Любой механизм предназначен для преобразования
движения входного звена 1 (рис. 3.2, а, б) или входных
звеньев (рис. 3.2, в) в требуемые движения звеньев, для
выполнения которых предназначен механизм. Входному звену
механизма с одной степенью свободы обычно присваивают
номер 1, а выходному звену — номер n, промежуточным
звеньям — порядковые номера:
2, 3,…, i,… n - 1.
5
6
Планы положений, скоростей
и ускорений плоских
рычажных механизмов
7
Графические методы кинематического исследования
механизмов, позволяющие определить положения звеньев,
скорости и ускорения точек и звеньев, получили широкое
распространение. Это обусловлено быстротой, удобством и
наглядностью решения прикладных вопросов
проектирования. Графические методы расчетов обладают
наглядностью и отличаются удобством контроля. В ряде
случаев графическое вычисление основано на
геометрических построениях, с некоторым приближением
заменяющих аналогичные аналитические и численные
операции. Имеется много примеров, когда графические
приемы являются единственно приемлемыми, так как дают
наиболее простое решение.
8
Точность графических методов 0,3…0,5% достаточна для
решения многих практических задач.
Графические методы становятся затруднительными,
если требуется провести большой объем однообразных
построений и не могут быть использованы непосредственно,
если расчеты требуется провести с высокой точностью.
9
10
11
12
Планы скоростей и ускорений. Планом скоростей
механизма называют чертеж, на котором изображены в виде
отрезков векторы, равные по модулю и по направлению
скоростям различных точек звеньев механизма в данный
момент. План скоростей для механизма является
совокупностью нескольких планов скоростей для отдельных
звеньев, у которых полюса планов р являются общей
точкой — полюсом плана скоростей механизма.
Чертеж, на котором изображены в виде отрезков
векторы, равные по модулю и направлению ускорениям
различных точек звеньев механизма в данный момент,
называют планом ускорений механизма.
13
14
Планы скоростей и ускорений при сложном движении точек звена.
При сложном движении точки или тела движение исследуется
одновременно в основной и подвижной системах отсчета.
Движение точки или тела по отношению к основной системе отсчета
называется абсолютным движением.
Движение точки или тела по отношению к подвижной системе отсчета
называется относительным движением.
Движение подвижной системы отсчета по отношению к основной
системе отсчета называется переносным движением.
Теорема сложения скоростей при сложном движении точки гласит:
абсолютная скорость аточки равна геометрической сумме
переносной
, и относительной
- скоростей этой точки:
r
е
При определении переносной скорости
точки предполагается, что
е
относительное движение точки остановлено.
.
а
е
r
15
При плоском движении звена переносное движение является
поступательным со скоростью произвольно выбранной точки звена,
принятой за полюс, а относительное движение является вращательным
вокруг этой точки; угол и направление поворота от выбора
полюса не зависят.
Абсолютное ускорение
любой точки звена при плоскопарал
а
лельном (плоском) движении твердого тела равно геометрической
а
сумме двух ускорений: ускорения
движении и ускорения
нии:
а
в поступательном переносном
е
движе
a во вращательном относительном(3.10)
r
n
r
r
а а a a a a
а
е
r
e
Где и — соответственно нормальное ускорение в относительном
ar ar
движении, направленное по радиусу вращения точки к центру кривизны траектории, и касательное ускорение, направленное перпендикулярно радиусу вращения'
n
16
17
18
Применение графического и численного
дифференцирования и интегрирования.
Если одна из кинематических функций задана или
определена в форме графика или в виде таблицы значений,
то найти производную или интеграл от этой функции
непосредственно в аналитической форме нельзя. В этом
случае эффективными являются численные и графические
методы дифференцирования и интегрирования.
19
Графическое и численное дифференцирование.
Графическое дифференцирование начинают с построения
графика функции по заданным значениям. При
экспериментальном исследовании такой график вычерчивают с
помощью самопишущих приборов. Далее проводят касательные к
кривой в фиксированных положениях и вычисляют значения
производной по тангенсу угла, образованного касательной с осью
абсцисс.
Например, определение углового ускорения ε при заданном
графике t проводят графическим дифференцированием.
На рис. 3.30, кривая а1 изображена по оси ординат в масштабе
рад
с
, мм/(
абсцисс,
мм/с. Искомая функция может быть
), по оси
найдена по соотношению
y
d
dy (3.87)
d
t
t
tg
dt
dx
t
x
t
d
t
20
21
Лекция 5
22
Основные задачи кинематического анализа механизмов
При проектировании новых машин и механизмов
возможны два пути:
1) разработка по заданным техническим условиям
нескольких вариантов новой системы методами
метрического синтеза;
2} отбор наиболее подходящей системы из ряда
существующих аналогичных конструкций в
результате их сравнительного анализа.
В обоих случаях выбор оптимального варианта
производят после исследования схем механизмов и
определения их кинематических и динамических
параметров.
Детальный сравнительный анализ результатов
исследования возможных вариантов схем
механизмов и последующий поиск оптимального
решения на основе строгого математического
обоснования характеризует морфологический
подход.
При кинематическом исследовании ставят две основные
задачи: определение положений звеньев и
траекторий заданных точек; определение
линейных и угловых скоростей и ускорений
звеньев и отдельных точек механизмов.
23
В результате кинематического анализа устанавливают соответствие
кинематических параметров (перемещений, скоростей и ускорений) заданным условиям, а также получают исходные данные
для выполнения динамических расчетов. Знание кинематических
параметров необходимо для расчета сил инерции и моментов сил
инерции, кинетической энергии механизма и мощности.
Кинематическое исследование схем механизмов выполняют графическими и аналитическими методами. Первые отличаются наглядностью и относительной простотой, но не дают точных результатов.
Аналитические методы позволяют получить требуемую точность
результатов и установить в аналитической форме функциональную
зависимость кинематических параметров механизма от метрических
параметров звеньев, но отличаются большой сложностью и трудоемкостью вычислений.
24
Разделение сложных рычажных механизмов на структурные
группы Ассура позволяет обобщить методы кинематического
анализа и применять их к этим группам, представляющим
статически определимые системы. Классификационный порядок
кинематических групп указывает возможный и наиболее
рациональный способ исследования данной системы.
25
Реализация некоторых из ранее перечисленных условий метрического
синтеза кинематических схем механизмов требует знания';
аналитических зависимостей, связывающих кинематические и
метрические параметры.
Эти же зависимости могут быть использованы для исследования'
кинематики механизма и контроля точности воспроизведения
необходимой функции S( )
или
что задача метрического синтеза решается по весьма
. Напомним,
малому числу заданных параметров (от 3 до 5), поэтому результаты
исследования, кроме самостоятельного значения, представляют интерес
для корректировки решения задачи синтеза.
Общий метод установления связи между кинематическими и геометрическими параметрами (ранее упоминался) основан на условии
замкнутости контура.
26
§ 3. Построение планов механизма и определение функций
положений
При кинематическом анализе сложных рычажных механизмов
определение положений скоростей и ускорений начинают с входного звена
и непосредственно к нему присоединенной группы Ас-сура, затем
переходят ко второй группе и т. д. Порядок кинематического исследования
механизма определяется результатами его структурного анализа и
соответствует формуле строения механизма. При графическом методе
кинематического анализа механизмов на чертеже изображают и
определяют построениями положения звеньев, траектории их точек,
скорости и ускорения. При этом пользуются вычислительными
масштабами, имеющими различную размерность. Размеры звеньев
выражают в метрах, величины линейных скоростей — в метрах на секунду,
линейных ускорений — в метрах на секунду в квадрате.
•
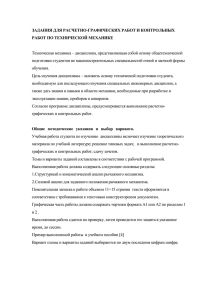
Рис. 3.5.
Построение
планов
положений
механизма
шарнирного
четырехзвенни
ка
27
.Планом механизма называют масштабное графическое изображение кинематической схемы механизма, соответствующее
заданному положению входного звена. Для механизмов, у которых
один оборот ведущего звена совпадает с периодом
кинематического цикла, обычно строят 12 или 24 плана механизма.
Это позволяет проследить движение звеньев за весь цикл и
определить закономерность изменения кинематических
параметров.
При построении планов механизма сначала следует найти его
крайние положения, ограничивающие траектории точек звеньев,
совершающих возвратное движение.
28
В шарнирном четырехзвеннике, например, крайние положения ведомого
коромысла DС (рис. 3.5) находят, производя на дуге, описываемой точкой
С, циркульные засечки двумя дугами из центра А вращения кривошипа.
Радиусы этих дуг равны сумме и разности длин шатуна и кривошипа
ВС+АВ и ВС — АВ. Пересечение указанных дуг с известной траекторией
шарнира С определяет крайние положения коромысла ОС0 и ОСК*.
За начальное (нулевое) положение механизма удобно принять!
одно из крайних, в котором палец кривошипа В лежит на продолжении
прямой С0А. Это положение пальца обозначено В0. При кривошип
перемещается от начального положения через
равные промежутки времени на равные углы поворота, а точка В
занимает равностоящие положения В1, В2, В3, ...,В12. Если требуется
построить 12 планов механизма, то окружность, описываемую точкой В,
следует разделить на 12 равных частей, начиная
от положения В0 (оно же будет В12). Соответствующие двенадцать
положений шарнира С коромысла определяют, делая засечки радиусом
ВС из каждого положения В1 на траектории точки С, на
пример из точки В5 (рис. 3.5).
29
• Соединяя двенадцать найденных точек В{ и С,прямыми между собой, а также с точками А и D,
получают двенадцать планов механизма.
• Положение, отмечаемое индексом «к», является
крайним правым дополнительным (тринадцатым)
положением механизма.
• При анализе механизма определяют функции
положения входного звена, Например, положение
коромысла DС определяется углом. Принимая за
независимую переменную угол поворота кривошипа,
получаем зависимость
f
• Или
(3.22)
sC R f
• Эти зависимости и представляют функции
положения, являющиеся геометрической
характеристикой механизма, определяемой его
структурой и геометрией.
30
•
•
Первая и вторая производные от функции (3.22) по также будут
геометрическими характеристиками, не зависящими от абсолютных
значений скоростей звеньев:
dsC f '
ИЛИ
(3.23)
d
2
d
2
•
•
d 2
f
''
ИЛИ
2
d 2s
C
d
2
f ''
2
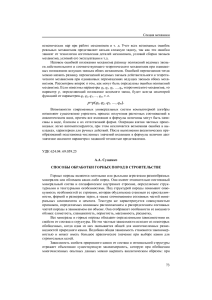
Проще всего функцию положения можно выразить, графически
пользуясь при разметке траекторий методом засечек. Каждому
положению точек В и С соответствуют определенные углы поворота
кривошипа φ и коромысла β, которые могут быть отложены в
масштабе, как абсциссы и ординаты в прямоугольной системе
координат (рис. 3.6). Если провести через найденные точки ординат
плавную кривую, то получится график β (φ) (рис. 3.6, а), представd
ляющий функцию положения
механизма. Максимуму и
данного
d f
минимуму функции соответствуют крайние положения механизма
(точки k и 0 (12)), причем в данном случае
>
0 к
к 12
По графику функции положения β (φ) графическим
дифференцированием можно построить график первой передаточной
функции
(Рис. З.6, б). Как известно, производная функции в
'
1
•
•
•
d
d
'
1
заданной точке ее графика пропорциональна тангенсу угла α,
образованного касательной к кривой в этой точке с осью абсцисс:
d
d
'
dy
dx
tg .
31
• На рис. 3.6, например, взято пятое положение
механизма и соответственно угол 5 . Для
построения графика β'(φ) (рис 36 б) на произвольно
выбранном расстоянии h1, влево от начала
координат новых осей отмечают полюс Р и проводят
из него луч под углом
к оси абсцисс.
5
• Если выразить tg 5 через отношение
сторон
'
полюсного треугольника, то tg 5 y 5 .
h1
•
Теперь, согласно равенству (3.25)
• ' y' y' ,
(3.26)
h1
• Где
'
коэффициент ординат на графике β'(φ),
h1
• имеющий размерность 1/мм.
32
• Для линейных перемещений s
С соответственно получится
•
s '
'
s
y s y' ,
h1
• где
R
точки
s
м/мм.
s
h1
'
• Изложенным методом графического
дифференцирования по графику ' можно
построить график второй передаточной
функции —производной '' (рис. 3.6,в)
33
Рис. 3.6. Графики функции положения β(φ) и передаточных функций
механизма шарнирного четырехзвенника
34
• Масштабный коэффициент ординат
этого графика равен:
s' м
•
или s ''
1
мм
''
h2
мм
h
• Где h2 — соответствующее полюсное
расстояние, которое можно взять
равным или неравным h1 .
35
• Дальнейшее дифференцирование позволит построить
график 'третьей передаточной функции — производной
•
''' d 3 3
d
•
Эта функция, представленная пунктирной кривой (рис. 3.6, в),
является ; аналогом производной ускорений , i da dt d 2 s dt 3
• характеризующей нарастание динамических нагрузок ведомого
звена.
• Третью производную в последние годы стали учитывать в связи
с повышением быстроходности механизмов и ростом
динамических нагрузок. Динамические нагрузки вызывают
динамические деформации, величина которых зависит от
характера нарастания этих нагрузок, т. е. от производной
ускорений. Закон изменения последней оказывает
существенное влияние на динамическую точность работы
механизмов в реальных условиях.
• При графическом дифференцировании следует обращать
внимание на характерные точки кривых, соответствующие
экстремальным значениям функции и точкам перегиба. На
графике |5 (<р) такими точками являются f, k, d, e. Точки f и k
соответствуют минимуму и максимуму функции, поэтому на
графике производной β'(φ) соответствующие ординаты равны
нулю. Точки d, и е являются точками перегиба кривой β'(φ),
поэтому на графике β'(φ) соответствующие ординаты d' и е'
имеют экстремальные значения производной.
36
Лекция 6
МЕХАНИЗМЫ ДЛЯ ПЕРЕДАЧИ
ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ
Вращение от одного вала другому
передается при помощи деталей,
закрепленных на валах и
взаимодействующих между собой
непосредственно или через гибкую связь. К
механизмам с непосредственным
контактом деталей относятся весьма
распространенные передачи зацеплением
и фрикционные передачи, а к механизмам
с гибкой связью — ременные, цепные и др.
37
Рис. 84. Цилиндрическая прямозубая передача внешнего
зацепления.
38
При вращении одного из колес его зубья входят в
зацепление с зубьями второго колеса и заставляют его
вращаться. При этом зубья ведомого колеса передачи
могут располагаться на внешней или внутренней
поверхности цилиндра, что предусматривается
конструктором и выполняется в процессе нарезания зубьев
на станке. При внутреннем зацеплении характерно
вращение обоих колес в одну сторону, что определяет
положительное отношение угловых скоростей и,
следовательно, положительное значение
передаточного числа .
39
40
• Рис. 88. Зацепление колеса с рейкой.
41
Если центр любого из двух находящихся в зацеплении
колес удалить в бесконечность, то его обод обратится в
зубчатую рейку и в результате получится реечное
зацепление (рис. 88) с пере даточным числом I12 = <~>, так
как угловая скорость рейки ω2 = О, Рейка совершает
поступательное движение со скоростью v, а ведущее
колесо, вызывая это движение, вращается с угловой
скоростью ω1. Ведущим звеном может быть и рейка. В этом
случае I21 = О.
42
Основные зависимости и геометрия зацепления
Термины, определения и обозначения. К зубчатым
передачам предъявляются несколько требований.
Передача вращательного движения с заданным
кинематическим законом при помощи зубчатых колес
прежде всего должна иметь, такую очерчивающую кривую
профиля зубьев, которая, с одной стороны, была бы
геометрически простой и, с другой, удовлетворила этому
закону. Причем зубья принятого профиля должны обладать
наибольшей прочностью при минимальном износе, а
давление на опоры валов — оставаться постоянным по
величине и направлению в соответствии с постоянной
передаваемой мощностью
43
• С точки зрения технологических
требований, проектируемый профиль
зуба должен быть таким, чтобы не
было затруднений при изготовлении
колеса на современном зуборезном
оборудовании.
• Важное значение имеют и
эксплуатационные требования, к
которым в первую очередь относятся
долговечность передачи,
относительная бесшумность хода и
легкость операций при ремонте
• В случае поломки или чрезмерного
износа зубьев любое колесо должно
быстро заменяться новым без ручной
или механической подгонки, это
значит, что колеса взаимозаменяемы
44
Измеренное по радиусу
расстояние между окружностью
головок и начальной окружностью
определяет высоту головки h', а
расстояние по радиусу между этой
окружностью и окружностью ножек
дает высоту ножки h’. Их сумма
определяет высоту зуба h:
• h = h' + h".
• Промежуток между двумя
смежными зубьями называется
впадиной. В нее входит зуб
спаренного колеса.
• Расстояние, измеренное по дуге
начальной окружности S1 или S2 и
вмещающее один зуб и рядом
расположенную одну впадину,
называется шагом зацепления и
буквой t:
обозначается
•
t CP PD.
45
• Из сказанного следует, что длина начальной
окружности при данном числе зубьев z и
шаге t будет zt, С другой стороны, эта длина
равна d , где d — диаметр делительной
окружности, приравнивая одно другому и
решая относительно d находим
d z
t
• Отношение шага t к числу π называется
модулем зацепления и обозначается буквой
т
t
• т=
• Поэтому выражение для диаметра можно
переписать иначе
d mz
46
•
Таблица 1
Модули зацеплений цилиндрических, конических и
червячных (с цилиндрическим червяком) передач, ГОСТ
9563—60
47
• Ниже даны стандартные зависимости зубчатых зацеплений,
предусмотренные ГОСТом 3058 — 54 для нормального прямозубого
колеса
• Шаг зацепления передачи t = πm
Высота головки зуба
h' = m
• Высота ножки зуба
h’’= 1,25m
• Высота зуба
h = 2,25m
• Радиальный зазор
е = 0,25m
• Диаметр делительной окружности, выраженный в мм,
=mz
• Диаметр окружности головок De = т(z+2)
• Диаметр окружности ножек Di = т(z— 2,5)
• ГОСТ 3058 — 54 предусматривает также изготовление зубчатых колес с
укороченными зубьями, для которых h=1,8т, высота головки h1=0,8т и
высота ножки h2 = т.
• Толщина зуба и ширина впадины, измеренные по начальной
окружности,
•
m
s s1
•
2
•
d
48
Рис. 91. К определению передаточного числа зубчатого механизма.
49
• Для обеспечения постоянства
передаточного числа в любой момент
работы передачи необходимо так
спрофилировать рабочие участки
зубьев, чтобы общая нормаль к ним в
любой точке касания проходила через
постоянную точку Р (полюс
зацепления), лежащую на линии
центров и делящую ее в отношении,
обратно пропорциональном отношению
угловых скоростей.
50