Министерство образования и науки Российской Федерации
Федеральное государственное бюджетное образовательное
учреждение высшего профессионального образования
«Пермский национальный исследовательский
политехнический университет»
П.В. Трусов, П.С. Волегов, Н.С. Кондратьев
ФИЗИЧЕСКИЕ ТЕОРИИ ПЛАСТИЧНОСТИ
Утверждено
Редакционно-издательским советом университета
в качестве учебного пособия
Издательство
Пермского национального исследовательского
политехнического университета
2013
УДК 539.5
Т77
Рецензенты:
академик РАН, профессор, директор
Института механики сплошных сред В.П. Матвеенко;
доктор физ.-мат. наук, профессор
Томского государственного архитектурно-строительного
университета Л.А. Теплякова
Т77
Трусов, П.В.
Физические теории пластичности : учеб. пособие / П.В. Трусов,
П.С. Волегов, Н.С. Кондратьев. – Пермь : Изд-во Перм. нац. исслед.
политехн. ун-та, 2013. – 244 с.
ISBN 978-5-398-01073-2
Представлен специальный класс современных теорий пластичности –
физические теории пластичности (ФТП), практически неизучаемые в российских
вузах и неосвещенные в силу этого в существующей отечественной учебнометодической литературе. В зарубежных периодических изданиях число публикаций по данной тематике растет стремительно, однако систематически изложенного курса не существует и в известных авторам зарубежных изданиях
(кроме нескольких монографий). Физические теории пластичности (в отличие от математических макрофеноменологических теорий) основаны на явном рассмотрении физических механизмов неупругой деформации и их носителей – дефектов кристаллического строения, поэтому приведено краткое
изложение теории дефектов. Последовательно излагаются основные типы ФТП,
их достоинства и недостатки. Значительное место отведено многоуровневым моделям, используемым для описания поведения моно- и поликристаллических материалов. Изложение материала основано на оригинальных статьях зарубежных
и отечественных исследователей (в том числе на публикациях авторов пособия).
Поскольку пособие ориентировано в первую очередь на магистрантов и аспирантов, подготовка которых в большей мере основана на самостоятельной работе, по большинству тем приведены краткие обзоры публикаций.
Предназначено для студентов и аспирантов механико-математических направлений и специальностей.
УДК 539.5
ISBN 978-5-398-01073-2
© ПНИПУ, 2013
ОГЛАВЛЕНИЕ
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ ...............................................................................5
СОКРАЩЕНИЯ ........................................................................................................8
ВВЕДЕНИЕ ...............................................................................................................9
ГЛАВА 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ ...................................22
1.1. О геометрической нелинейности и независимых от выбора
системы отсчета тензорзначных характеристиках ......................................23
1.2. Классический и обобщенные континуумы....................................................26
Вопросы к главе 1 ...................................................................................................37
ГЛАВА 2. МЕХАНИЗМЫ НЕУПРУГОГО ДЕФОРМИРОВАНИЯ ....................38
2.1. О дислокационных механизмах неупругого деформирования ...................38
2.2. Взаимодействия дислокаций с дислокациями и точечными дефектами....49
2.3. Деформирование монокристалла двойникованием........................................52
2.4. Закон Шмида ....................................................................................................58
2.5. Механизмы и модели деформационного упрочнения......................................61
Вопросы к главе 2 ...................................................................................................72
ГЛАВА 3. КИНЕМАТИКА НЕУПРУГОГО ДЕФОРМИРОВАНИЯ .................74
3.1. Уравнение Орована..........................................................................................74
3.2. Моды неупругого деформирования монокристаллов...................................75
3.3. Статистически накопленные и геометрически необходимые
дислокации, изгибы–кручения решетки ........................................................83
3.4. Ротационные моды деформирования, модели ротации...............................90
Вопросы к главе 3 ...................................................................................................95
ГЛАВА 4. ЖЕСТКОПЛАСТИЧЕСКИЕ МОДЕЛИ .............................................96
4.1. Модель Закса ....................................................................................................96
4.2. Модель Тейлора ...............................................................................................98
4.3. Модель Бишопа–Хилла .................................................................................104
Вопросы к главе 4 .................................................................................................114
ГЛАВА 5. УПРУГОПЛАСТИЧЕСКИЕ МОДЕЛИ ............................................116
5.1. Модель Линя ..................................................................................................117
3
5.2. Направления развития упругопластических моделей ...............................121
Вопросы к главе 5 .................................................................................................132
ГЛАВА 6. ВЯЗКОУПРУГИЕ И ВЯЗКОПЛАСТИЧЕСКИЕ МОДЕЛИ ..........134
Вопросы к главе 6 .................................................................................................142
ГЛАВА 7. УПРУГОВЯЗКОПЛАСТИЧЕСКИЕ МОДЕЛИ ...............................143
7.1. Анализ упруговязкопластических моделей....................................................143
7.2. Краткий обзор работ по упруговязкопластическим моделям ...................166
Вопросы к главе 7 .................................................................................................182
ГЛАВА 8. СТРУКТУРА И АЛГОРИТМЫ РЕАЛИЗАЦИИ
МНОГОУРОВНЕВЫХ МОДЕЛЕЙ ....................................................................184
8.1. Наиболее распространенная схема построения многоуровневых
моделей, их структура и классификация ....................................................184
8.2. Согласование определяющих соотношений масштабных уровней
и конкретизация независящей от выбора системы отсчета
производной ...................................................................................................192
8.3. Классификация внутренних переменных и уравнений
конститутивной модели на примере двухуровневой
упруговязкопластической модели................................................................199
8.4. Модель поворотов кристаллической решетки, учитывающая
взаимодействие элементов мезоуровня .......................................................202
8.5. Алгоритм реализации двухуровневой упруговязкопластической
модели.............................................................................................................209
Вопросы к главе 8 .................................................................................................219
ЗАДАЧИ И УПРАЖНЕНИЯ ...............................................................................221
БИБЛИОГРАФИЧЕСКИЙ СПИСОК .................................................................228
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ ............................................................................242
4
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ
Е – модуль упругости
G – модуль Юнга
dи – интенсивность скоростей деформаций
I i (ε ), I i (e), i = 1,3 – главные инварианты тензора малых деформаций и его девиатора
I i ( Σ), I i (S), i = 1,3 – главные инварианты тензора напряжений
Коши Σ и его девиатора S
K – модуль объемного сжатия
kb – константа Больцмана
×
K0, Kt, K t – отсчетная, актуальная и промежуточная (разгруженная
из Kt) конфигурации
O – собственно ортогональная группа
Rn – n-мерное евклидово пространство
s (s p ) – длина дуги траектории деформации (пластической деформации)
t – время (или его аналог)
Тг – гомологическая температура
Х – обозначение материальной частицы в материальном способе
описания движения
X i , ξ i – лагранжевы координаты в декартовой ортонормированной
и произвольной криволинейной системах координат, соответственно
ε – средняя деформация
ε u – интенсивность деформаций
Н – функция Хэвисайда, Н (х) = 0 при х < 0 и Н (х) = 1 при х ≥ 0
η – вязкость материала
ν – коэффициент Пуассона
θ – температура
σ – среднее напряжение
σи – интенсивность напряжений
σ p – предел пропорциональности
σS – предел текучести
5
σ в – предел прочности
τи – интенсивность сдвиговых напряжений
φ, φ* – системы отсчета, отличающиеся жестким движением
b, b – вектор Бюргерса и его модуль
o o
ei ei , eˆ i ( eˆ i ) – лагранжевы векторы основного (сопряженного)
базиса в K0 и Kt
R0, r – радиус-векторы частиц в K0 и Kt
ο
∇ , ∇ˆ – набла – операторы (операторы Гамильтона) в отсчетной
и актуальной конфигурациях
D, d – тензор деформации скорости на макро- и мезоуровне
Е (или g) – единичный (метрический) тензор
(⋅) – определяющее отображение
o
G , C – мера и тензор деформации Коши–Грина
J β – тензорзначные внутренние переменные
J eγ , J iδ – «явные» и «скрытые» внутренние переменные
(k )
(k )
m( k ) , m(S)
, m(A)
– ориентационный тензор k-й кристаллографиче-
ской системы, его симметричная и антисимметричная составляющие
O(t) – собственно ортогональный тензор
Pγ – параметры воздействия
R – ортогональный тензор, сопровождающий деформацию
β,
r β,
β,
r β – операторы конститутивных соотношений
U, V – левый и правый тензоры искажения
ε, e – тензор малых деформаций и его девиатор
П ( π ) – тензор (4-го ранга) упругих характеристик макроуровня
(мезоуровня)
ρ – тензор остаточных микронапряжений
Σ, σ (S, s) – тензор напряжений Коши макро- и мезоуровня (их девиаторы)
χ α – тензорзначные функции, характеризующие нетермомеханические воздействия на материал
o
∇ r – градиент места
6
Є – тензор Леви–Чивита
(⋅)e , (⋅) p – индексы, относящиеся к упругим и пластическим составляющим
(⋅)r – обозначение объективной (коротационной) производной
<⋅> – скобки Мак-Кэйли, <х> = 0 при х ≤ 0 и <х> = х при х > 0
⋅ – осредненные величины
7
СОКРАЩЕНИЯ
ГНД – геометрически необходимые дислокации
ГЦК, ГПУ, ОЦК – гранецентрированная кубическая, гексагональная плотноупакованная, объемно-центрированная кубическая (кристаллические решетки)
ДОН – дислокации ориентационного несоответствия
ДУ – дефект упаковки
ЗГС – зернограничное скольжение
ЗУ – замыкающие уравнения
ИПД – интенсивное пластическое деформирование
КлК – классические континуумы
КСК – кристаллографическая система координат
ЛСК – лабораторная система координат
МДТТ – механика деформируемого твердого тела
МСС – механика сплошной среды
ОК – обобщенный континуум
ОС – определяющие соотношения
ПО – представительный объем
СНД – статистически накопленные дислокации
СП – сверхпластичность
СПД – сверхпластическое деформирование
СС – система скольжения
СТТ – стандартный тетраэдр Томпсона
ТОС – теория определяющих соотношений
ФРО – функция распределения ориентаций
ФТП – физическая теория пластичности
ФТТ – физика твердого тела
ЭДУ – энергия дефекта упаковки
ЭУ – эволюционные уравнения
8
ВВЕДЕНИЕ
Процессы неупругого деформирования и свойства поликристаллических материалов на макроуровне, как показывают многочисленные экспериментальные и теоретические исследования, существенным образом определяются состоянием эволюционирующей мезои микроструктуры материала. Под эволюцией мезоструктуры здесь
понимаются процессы разворотов кристаллических решеток зерен
или фрагментов зерен, а также их фрагментация и дробление. Под
эволюцией микроструктуры в первую очередь понимаются изменения
в дефектной структуре материала на микроуровне (уровне дислокационных субструктур, конгломератов точечных дефектов, границ зерен и т.д.). Попытки построения математических моделей, описывающих эволюцию мезо- и микроструктуры в широком диапазоне
воздействий на материал, предпринимаются еще с 30–50-х годов
XX века (Дж. Тейлор, Дж. Бишоп, Р. Хилл, Т.Г. Линь и др.); значительных успехов в описании процессов неупругого деформирования
достигли и отечественные ученые (Я.Д. Вишняков, О.А. Кайбышев,
В.А. Лихачев, П.В. Макаров, А.Н. Орлов, В.Е. Панин, В.В. Рыбин и др.).
Мезо- и микроструктура материала существенным образом изменяются в процессе деформирования. С одной стороны, макронагружения (макродеформации) являются источником, движущей силой изменения мезо- и микроструктуры; с другой стороны, эволюция мезои микроструктуры является фактором, определяющим поведение материала на макроуровне. Таким образом, управляя мезо- и микроструктурой, можно управлять свойствами материалов на макроуровне, которые
и определяют рабочие характеристики готовых деталей и конструкций.
Поэтому в настоящее время при разработке математических моделей
технологических процессов, в нелинейной механике деформируемого
твердого тела (МДТТ) одной из наиболее актуальных проблем является
построение моделей, описывающих эволюцию мезо- и микроструктуры
поликристаллических материалов.
Так, известно, что пластическая деформация, превышающая 5–10 %,
сопровождается образованием кристаллографической текстуры того или
иного типа и той или иной интенсивности. Под кристаллографической
текстурой понимаются неоднородность функции распределения ориен9
таций (ФРО) [9] решеток зерен представительного макрообъема, наличие выделенных (преимущественных) направлений в пространственной
ориентировке кристаллических решеток отдельных составных частей
(зерен, субзерен) поликристаллического тела по отношению к характерным направлениям обработки (прокатки, экструзии и т.д.). Вследствие
образования текстуры поликристаллический материал приобретает анизотропию свойств на макроуровне. Существуют примеры как положительного (например, пресс–эффект при прессовании), так и отрицательного (образование фестонов при листовой штамповке) влияния текстуры на механические характеристики. Таким образом, актуальность
построения модели текстурообразования подтверждается достаточно
острой необходимостью её применения для исследования технологических процессов с целью улучшения свойств материала и предотвращения негативных эффектов.
Широкий класс теорий пластичности, в основе формулировок определяющих соотношений, гипотез и основных положений которых лежит рассмотрение в явной форме механизмов деформирования на мезои микромасштабах и появление которых во многом предопределили работы перечисленных выше ученых, будем называть физическими теориями пластичности [44, 51, 172].
В качестве характеристик, связанных с эволюцией мезоструктуры,
наиболее существенных с точки зрения изменения физико-механических свойств поликристаллического материала, можно выделить следующие [4, 9, 34]:
1) изменение ориентаций решеток («пластические» развороты)
кристаллитов (зерен, субзерен, фрагментов);
2) изменение формы и размеров зерен, фрагментация и дробление
зерен при развитых пластических деформациях, приводящие к уменьшению среднего размера зерна.
Исследованию параметров второй группы посвящено большое количество работ [15, 34], в первую очередь – экспериментальных, причем
в последние годы в связи с интенсификацией исследований субмикрокристаллических и наноматериалов число работ по этому направлению
растет лавинообразно. Основным эффектом, связанным с уменьшением
размера зерна, является улучшение прочностных свойств поликристалла
(повышение пределов текучести и прочности), обусловленное увеличением доли межзеренных границ [15]. С другой стороны, при определенных условиях (в частности, сохранения равноосности зерен) некоторые
10
материалы с уменьшением размера зерна могут стать способными
к сверхпластическим деформациям [6].
Монокристаллические тела с идеальной структурой вследствие неодинаковой плотности атомов в различных плоскостях и направлениях
решетки обладают анизотропией физических и механических свойств.
Например, модуль упругости, удельное электросопротивление, коэффициент диффузии имеют различное значение для разных направлений
в кристалле [7, 9, 19].
Используемые в технике металлы и сплавы, как правило, являются
поликристаллами, т. е. состоят из большого числа анизотропных кристаллитов (зерен, субзерен). В большинстве случаев (в состоянии поставки) в пределах представительного макрообъема кристаллиты статистически неупорядоченно ориентированы один по отношению к другому, поэтому на уровне представительного макрообъема во всех направлениях
свойства можно считать одинаковыми, т.е. поликристаллическое тело
в макроскопическом смысле можно считать изотропным.
Пластическая деформация уже при умеренных интенсивностях
(порядка 0,1–0,2) деформации, сопровождается образованием кристаллографической текстуры того или иного типа и той или иной интенсивности. Под кристаллографической текстурой понимается неоднородность функции распределения ориентаций (ФРО) решеток зерен
в представительном объеме, наличие выделенных (преимущественных)
направлений в пространственной ориентировке кристаллических решеток отдельных составных частей (зерен, субзерен) поликристаллического тела [9]. Конкретный вид текстуры определяется типом кристаллической решетки кристаллитов, схемой деформирования материала, величиной накопленных деформаций, энергией дефекта упаковки (ЭДУ)
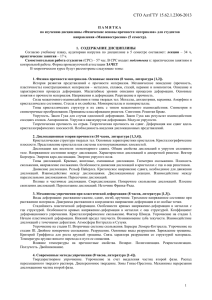
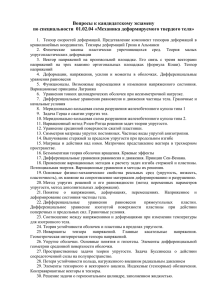
и другими физическими параметрами. На рис. В.1 приведены наиболее
распространенные текстуры листовой прокатки.
Экспериментальному исследованию свойств текстурированных
материалов посвящено значительное количество работ, например [69,
104, 109, 110, 123, 179, 182], этой тематике посвящена регулярно проводящаяся (раз в 3 года) Международная конференция «International Conference on Textures of Materials (ICOTOM)».
Эксперименты со всей очевидностью показывают, что вследствие
образования текстуры поликристаллический материал приобретает анизотропию свойств на уровне представительного макрообъема. В качестве примера можно привести зависимость между модулем упругости E
11
Рис. В.1. Схема кристаллографической ориентировки кристаллитов
в листовом материале в случае кубической (а) и ребровой (б) текстуры
и направлением в прокатанных металлических листах. Для многих гранецентрированных кубических (ГЦК) и объемно-центрированных кубических (ОЦК) металлов имеется явно выраженный экстремум Е для угла
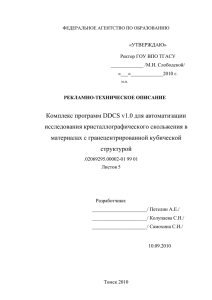
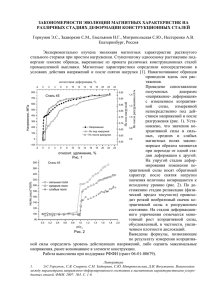
φ ≈ 45 (ϕ – угол к направлению прокатки (НП), ПН – направление, перпендикулярное плоскости прокатки), однако характер экстремума различен. Для экспериментальных исследований из прокатанного листа вырезались под разными углами к НП узкие полоски, и для них в опытах на растяжение определялись значения Е. На рис. В.2 приведены зависимости
величины Е от угла ϕ для прокатанных листов с различным составом [7].
Рис. В.2. Зависимости Е от угла к направлению прокатки ϕ [7]
Для ОЦК-металлов было обнаружено также, что прочностные
характеристики ( σ S и σ в ) максимальны в направлении ПН, а остаточное удлинение – в направлении НП. С текстурой связано также вышеупомянутое явление пресс-эффекта, заключающееся в том, что при оп12
ределенных условиях прессования металлических сплавов их
прочностные свойства в направлении прессования повышаются.
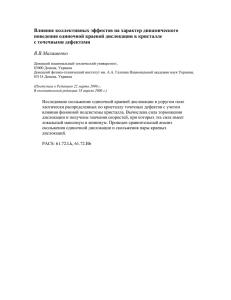
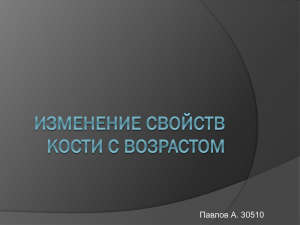
Намагниченность насыщения для α-железа с ОЦК-решеткой одинакова для кристаллов
с различной ориентировкой, однако скорость приближения к намагниченности насыщения существенно изменяется в зависимости
от ориентировки. На рис. В.3 показано, что насыщение ориентировки <100> происходит быстрее,
чем насыщение любой из ориенРис. В.3. Приближение
тировок <110> или <111>; таким
к намагниченности насыщения
при разных ориентировках α-железа
образом, направление, соответствующее ребру куба, насыщается
легче всего, тогда как направление, соответствующее диагонали куба,
насыщается труднее всего [19]. На основании изложенного легко понять, что лист поликристаллического железа с соответствующей текстурой может превосходить по магнитным свойствам лист с беспорядочно ориентированными зернами. Электротехническая промышленность использует для сердечников трансформаторов лист из сплава
железа с кремнием (3,3 % кремния) с целью достижения минимальных
потерь на гистерезис; при этом лист должен обладать сильно развитой
кубической текстурой {100}<001>, которая имеет два направления
наиболее легкого намагничивания <100> в плоскости листа. Второй
подходящей текстурой является {110}<001>, или ребровая кубическая
текстура, которая имеет лишь одно направление легчайшего намагничивания в плоскости листа.
Таким образом, практическое значение текстур обусловлено вызываемой ими анизотропией свойств, которая может весьма эффективно
использоваться. В то же время образование текстуры может и негативно
повлиять на макросвойства материала: например, при листовой штамповке, глубокой вытяжке заготовок из металлов и сплавов могут образовываться так называемые фестоны [7].
13
Экспериментально текстуры определяют с помощью методов
рентгеновского анализа, просвечивающей электронной микроскопии
и дифракционным методом электронной микроскопии [28]. В работе
[69], содержащей значительное количество экспериментальных данных
по лучевым и двухзвенным траекториям деформации листового алюминиевого сплава, подробно описана методика экспериментальных исследований, включающих как чисто механические измерения, так и анализ
текстуры и дислокационных субструктур.
Подход к построению определяющих соотношений
с использованием внутренних переменных
Имеются, по крайней мере, две возможности учета эволюции мезо- и микроструктуры в математических моделях материалов: неявным
или явным способом. В первом случае в структуру определяющих соотношений (ОС) вводятся достаточно сложные операторы над историей
макронагружения (макродеформации) [35], без использования в явной
форме параметров, описывающих эволюцию собственно мезо- и микроструктуры (например, теория упругопластических процессов А.А. Ильюшина [12, 13]). Как правило, при этом трудно выявить и обосновать
физический смысл и механизмы деформирования, описываемые различными (обычно – довольно сложными) операторами модели материала. Идентификация подобных моделей требует проведения трудоемких
и дорогостоящих экспериментов. Применение подобных ОС при решении краевых задач, возникающих при анализе реальных процессов, также связано со значительными трудностями.
В последние десятилетия все большее признание находит второй
способ – явное введение в структуру определяющих соотношений параметров, описывающих состояние и эволюцию мезо- и микроструктуры, и формулировки эволюционных (кинетических) уравнений для этих
параметров, называемых «внутренними переменными».
В литературе, посвященной различным теориям процессов необратимого деформирования, внутренними переменными называют параметры, отражающие структуру и механизмы деформирования на мезои микроуровнях. Этимология термина «внутренние переменные», вероятно, связана и с (неравновесной) термодинамикой, где внутренними
переменными называют параметры состояния термодинамической системы, управлять напрямую изменениями которых за счет внешних воз14
действий невозможно. Иначе говоря, эти переменные описывают «внутреннюю жизнь» термодинамической системы, чрезвычайно богатую
сценариями развития, неустойчивостями, возникновением и разрушением внутренних структур.
Например, в случае рассмотрения процессов упругопластического деформирования поликристаллических материалов такими переменными могут являться параметры, характеризующие размеры
и форму зерен, накопленные сдвиги по различным системам скольжения (СС), текущие критические напряжения сдвига по СС. Большинство физических теорий пластичности построено, по существу, в рамках
данного подхода с использованием указанных выше внутренних переменных, которые характеризуют состояние материала в текущий момент времени. Для упругопластического деформирования в общем
случае возможно введение и других параметров, характеризующих,
например, дефектную структуру как в отдельных зернах, так и во всем
рассматриваемом представительном объеме. В частности, для учета
механизма зернограничного скольжения необходимым представляется
введение в качестве отдельных элементов структуры межзеренных
границ, величин сдвигов по границам и критических напряжений зернограничного скольжения (ЗГС).
В настоящее время невозможно назвать какую-либо теорию необратимых деформаций, не использующую явно или неявно внутренние
переменные. Например, в классической теории пластичности широко
применяется понятие поверхности текучести, отделяющее в пространстве напряжений области упругого и неупругого деформирования [11,
14, 33]. В процессе деформирования поверхность текучести изменяет
свою форму и размеры, перемещается как целое [14]. Эта эволюция поверхности текучести на макроуровне отражает изменения свойств материала, обусловленные перестройками мезо- и микроструктуры, в связи
с чем параметры, описывающие эволюцию этой поверхности, с полным
правом можно отнести к внутренним переменным. Аналогичная ситуация имеет место и в других теориях (вязкоупругости, вязкопластичности, ползучести и др.). Широкий класс моделей, по существу, основанных на введении внутренних переменных, разработан исследователями
томской школы физиков [22–24, 54].
Рассмотрим общую структуру конститутивной модели с использованием внутренних переменных для некоторого масштабного уровня.
Введем следующие обозначения:
15
Σ – мера (в общем случае произвольная) напряженного состояния,
Σ r – ее объективная [31] скорость изменения,
Ρ γ γ = 1, Γ – параметры воздействия термомеханической (например, температура, мера деформированного состояния и т.д.) и нетермомеханической (например, радиация, химические воздействия) природы.
Часть внутренних переменных непосредственно входит в структуру ОС данного масштабного уровня, такие переменные в дальнейшем
будем обозначать как J βe , β = 1, Βe и для ясности называть их внутренними «явными» (explicit) переменными. Вторая группа внутренних переменных (в большинстве случаев относящихся к более глубоким масштабным уровням) входит в качестве переменных в эволюционные
уравнения (ЭУ); переменные этой группы будем обозначать как J βi ,
β = 1, Βi ; для того чтобы отличать их от переменных первой группы,
будем называть их внутренними «скрытыми (неявными)» (implicit) переменными. Полная совокупность внутренних переменных, таким образом, определяется как
{J } = {J , J } ,
β
e
γ
i
δ
β = 1, Β ,
γ = 1, Βe , δ = 1, Βi ,
Β = Βe + Βi .
При построении модели для решения вопроса выбора внутренних
переменных целесообразно руководствоваться нижеприведенными требованиями:
1. Набор внутренних переменных должен быть достаточным для
адекватности модели: последняя должна описывать интересующие эффекты и соответствовать экспериментальным данным с требуемой точностью;
2. Набор внутренних переменных должен быть минимальным (так
как введение каждой дополнительной переменной приводит к необходимости включения эволюционного уравнения (для неявных) или уравнения замыкания (для явных), т.е. усложнению ОС).
Можно отметить, что требования 1 и 2 противоречивы, что характерно для построения любой модели [8]: необходимо при минимуме использованных средств достичь возможно полного, адекватного описания явления или объекта.
3. Внутренние явные переменные (по крайней мере, некоторые)
должны быть измеримы экспериментально в любой момент времени.
К этому приводит необходимость задания начальных условий для (не16
которых) явных внутренних переменных (например, распределение зерен по размерам в начальный момент времени). Кроме того, измеримость некоторых переменных необходима для верификации модели.
Структура конститутивной модели
с внутренними переменными
Анализ существующих моделей материала и физических механизмов неупругого деформирования широкого класса конструкционных
материалов позволяет предложить структуру конститутивной модели,
включающую:
1) уравнения состояния (определяющие соотношения (ОС))
Σ r = F r (Pα , J eγ ) ,
(В.1)
2) эволюционные уравнения (ЭУ) (для скрытых переменных)
J irδ = R rδ (Pα , J βi ) ,
(В.2)
3) замыкающие уравнения (ЗУ)
J erγ = Crγ (Pα , J iδ ) .
(В.3)
Наряду с соотношениями в скоростной (дифференциальной) форме могут использоваться уравнения в терминах самих параметров, характеризующих напряженно-деформированное состояние и воздействия. Вопрос выбора типа ОС, ЭУ и ЗУ – в терминах мер напряженного
состояния и других параметров («интегральные» соотношения) или
мер скоростей их изменения («дифференциальные» соотношения, соотношения скоростного типа) – в каждом конкретном случае решается
исследователем. При этом учитываются соображения физического характера, сложности записи соотношений, ясности интерпретации результатов и т.д.; понятно, что в силу отсутствия четко определенных
критериев подобный выбор во многом субъективен. Следует отметить,
что общая система соотношений модели материала может содержать
уравнения разных типов как по группам соотношений, так и внутри
каждой из трех групп.
17
В качестве положительных сторон подхода можно отметить следующие:
1. Бόльшая ясность физической интерпретации уравнений по
сравнению с построением ОС в операторной форме. В частности, при
построении макрофеноменологических (операторных) соотношений
теории пластичности необходимость учета нескольких (а зачастую –
множества) механизмов приводит к чрезвычайной сложности получаемых уравнений, что затрудняет анализ таких ОС (особенно в случаях,
когда в авторской работе подробно не раскрывается физический смысл
построенных в ней ОС). Применение внутренних переменных позволяет
существенно упростить эти операторы. При этом и сами внутренние переменные, и эволюционные уравнения для них физически прозрачны.
2. Возможность прямой или косвенной проверки результатов моделирования эволюции мезо- и микроструктуры на основании опытных
данных и/или анализа параметров на различных масштабных уровнях.
3. Относительная простота совокупности уравнений модели (определяющих, эволюционных и замыкающих).
4. Широкие возможности обработки результатов решения эволюционных уравнений при переходе к макропеременным (с использованием различных операторов осреднения). На основании одних и тех же
уравнений для микро- и мезоуровней возможно получение различных
(в том числе дающих количественно различные результаты) моделей
материалов.
5. Модели данного типа обладают значительной универсальностью, поскольку они основаны на фундаментальных физических законах, пригодных для описания целых классов материалов.
В качестве отрицательных сторон подхода можно отметить:
1) большое число внутренних переменных и соответствующих эволюционных уравнений, необходимых для адекватного описания процесса
необратимого деформирования;
2) трудности решения «проблемы замыкания»: при формулировке
физических уравнений для представительного макрообъема возникает
необходимость введения параметров меньшего масштабного уровня
и эволюционных уравнений для них и т.д. Следует отметить два наиболее употребительных подхода к решению проблемы замыкания. В первом – феноменологическом – параметры, характеризующие структуру
на более низких масштабных уровнях, определяются функциональными
уравнениями через параметры рассматриваемого уровня (например, как
18
в модели турбулентности Рейнольдса) с последующей экспериментальной проверкой этих уравнений. Второй подход основан на построении
иерархической совокупности моделей нескольких масштабных уровней
и установлении связей между однотипными характеристиками процесса
деформирования соседних уровней. Следует отметить, что в этом случае полностью избежать феноменологических соотношений, конечно,
не удается, однако они записываются для самого низкого масштабного
уровня в принятой иерархической совокупности;
3) отсутствие в подавляющем большинстве случаев аналитических
решений системы эволюционных и определяющих соотношений, что
приводит к необходимости использования численных методов.
Анализируя совместно и преимущества, и недостатки рассматриваемого подхода, можно отметить, что применение данного подхода
представляется весьма перспективным для построения моделей материалов, особенно в свете развития вычислительных технологий.
О многоуровневых моделях
Следует отметить, что подавляющее количество теоретических
работ, посвященных описанию формирования и эволюции текстуры,
являются, по существу, двухуровневыми (мезо- и макроуровни). В связи
с этим кратко остановимся на особенностях построения многоуровневых моделей . Обзор подходов и методов, применяемых в многоуровневых моделях, гипотез и алгоритмов для установления связей родственных переменных различных уровней, основных нерешенных проблем
в рассматриваемой области приведен в [78]. Представляет интерес одна
из недавних публикаций по данному направлению [126], в которой делается попытка сформулировать теоретические основы построения многоуровных моделей. Отмечается, что существующие многоуровневые
модели можно разделить на два больших класса: 1) «согласованные»
(двухсторонние), в котором связи параметров соседних уровней устанавливаются с применением итерационных процедур между уровнями;
2) «иерархические» (односторонние), для которых указанные связи определяются только в одном направлении – сверху вниз или снизу вверх
(по шкале масштабов). Приведена общая схема N-уровневой модели,
согласно которой каждой точке «грубого» k-го уровня соответствует
представительный (материальный или статистический) объем более
«тонкого» (k+1)-го уровня; дальнейшее рассмотрение ведется для двух
19
соседних уровней. Большое внимание уделяется связям параметров
и уравнений различных уровней, формулируется набор законов (называемых авторами принципами) для установления этих связей.
Детально рассматривается кинематика соседних масштабных
уровней, устанавливаются связи кинематических характеристик (координат, градиентов места, ограничиваясь вторым порядком градиентов),
мультипликативное разложение градиентов места, отмечается отличие
промежуточных (разгруженных) конфигураций рассматриваемых уровней. Уравнения движения (изменения количества движения и момента
количества движения) записаны в обобщенной формулировке (принцип
виртуальных скоростей). Значительная часть статьи посвящена рассмотрению термодинамических соотношений и установлению связей
между термодинамическими параметрами соседних уровней. Обсуждаются подходы к формулировке конститутивных соотношений рассматриваемых масштабных уровней.
Классификационными признаками для подразделения многоуровневых моделей на классы могут быть выбраны: а) число уровней, включенных в рассмотрение , и связанный с уровнями выбор
«элементарной ячейки» (в дальнейшем будем называть ее «элементом» соответствующего уровня); б) модель (гипотеза) связи однотипных характеристик различных уровней; в) физические теории,
положенные в основу соотношения нижних масштабных уровней.
В настоящее время подавляющее большинство используемых многоуровневых моделей относится к двухуровневым (макро- и мезоуровни), в качестве элемента нижнего уровня в таких моделях, как
правило, выбирается кристаллит (зерно, субзерно); в последние годы появляются трехуровневые модели (с добавлением микроуровня). В подразд. 8.1 подробно рассмотрены идеология построения
многоуровневых моделей и их классификация .
Весьма важным отличительным признаком многоуровневых моделей, во многом определяющим «качество» моделей, является гипотеза о связи характеристик различных уровней (иногда говорят о гипотезе осреднения, или о гипотезе агрегирования – объединения элементов нижележащего уровня в элемент более высокого масштабного
уровня). На различных вариантах таких связей подробно остановимся
в подразд. 8.2.
20
Вопросы к разделу «Введение»
1. Что понимается под мезо- и микроструктурой? Какие характеристики мезоструктуры оказывают наибольшее влияние на физико-механические макросвойства материалов?
2. Чем объясняется необходимость исследования эволюционирующей мезо- и микроструктуры?
3. Почему одни и те же по химическому составу поликристаллические материалы способны демонстрировать как изотропные, так
и анизотропные макросвойства? Приведите примеры изменения симметрийных свойств.
4. Дайте краткое определение двух основных подходов, используемых для построения определяющих соотношений.
5. Назовите основные понятия, определения и структуру конститутивных моделей материала, основанных на использовании внутренних
переменных.
6. Назовите основные положительные и отрицательные стороны
моделей с внутренними переменными.
7. Приведите краткое описание многоуровневых моделей.
21
ГЛАВА 1. ОСНОВНЫЕ ПОНЯТИЯ И ОПРЕДЕЛЕНИЯ
Поиски «кирпичиков», «атомов», из которых можно было бы составить картину мироздания, никогда не прекращались в науке в целом; механика и, в частности, теория пластичности не являются в этом смысле
исключением. Параллельно с созданием и развитием континуальных
подходов и макрофеноменологических ОС в механике, начиная с ХХ века, интенсивно велись (и ведутся) работы по созданию теорий, основанных на рассмотрении глубинных физических механизмов деформирования, присущих всем телам или их достаточно широким классам (например, металлам и сплавам). Сильнейшим импульсом для развития
подобных теорий пластичности было открытие в 30-х годах ХХ века дислокаций (см. гл. 2), а вслед за этим – и других дефектов кристаллического
строения материалов.
Напомним, что под физическими теориями пластичности
(ФТП) здесь будет пониматься широкий класс теорий пластичности,
в основе формулировок определяющих соотношений, гипотез и основных положений которых лежит рассмотрение в явной форме механизмов деформирования на мезо- и микромасштабах (т.е. масштабных
уровнях, меньших уровня представительного объема в макросмысле,
или представительного объема в инженерном смысле), в силу чего материал данного раздела существенным образом опирается и тесно связан с физикой твердого тела (ФТТ); для облегчения работы с материалом часть необходимых соотношений и определений приведена в гл. 2.
Приведенное определение указывает на основное отличие ФТП от классических теорий пластичности (называемых в литературе по механике
деформируемого твердого тела (МДТТ) обычно математическими теориями), в которых с самого начала формулировка теории осуществляется в терминах континуальной механики, полей напряжений, деформаций и других параметров.
Следует отметить, что возникновение и развитие физических теорий пластичности как отдельной ветви теории пластичности неразрывно
связаны с пионерскими работами Дж. И. Тейлора, К.Ф. Элам [164–166]
и Г.О. Закса [133, 158]. С этого времени появилось огромное количество
различных вариантов физических теорий, но практически во всех из них
22
наблюдаются «родовые признаки» теорий указанных авторов, особенно
Дж. И. Тейлора.
Установление масштабных уровней, вовлекаемых в рассмотрение
в конкретном варианте ФТП, определяется требованиями исходной постановки задачи, особенностями исследуемых процессов, известными
сведениями или гипотетическими представлениями о лидирующих
и аккомодационных процессах, определяющих неупругое деформирование. Решение вопроса о выборе уровней не лишено и субъективного
компонента – квалификации исследователя, его приверженности тем
или иным подходам, доступностью тех или иных инструментальных
средств и т.д. В настоящее время диапазон микромасштабов чрезвычайно широк – от 10–19 до 10–3 см3.
Для изложения современных физических теорий пластичности необходимо напомнить некоторые основные понятия, определения и соотношения нелинейной МДТТ.
1.1. О ГЕОМЕТРИЧЕСКОЙ НЕЛИНЕЙНОСТИ И НЕЗАВИСИМЫХ
ОТ ВЫБОРА СИСТЕМЫ ОТСЧЕТА ТЕНЗОРЗНАЧНЫХ
ХАРАКТЕРИСТИКАХ
Одной из сложнейших задач МДТТ в целом и ФТП в частности
является проблема построения ОС для случая геометрически нелинейных проблем (больших градиентов перемещений). В настоящее время ее
решение часто осуществляется обобщением известных «геометрически
линейных» ОС. В качестве примера рассмотрим обобщение ОС Максвелла на случай больших градиентов перемещений. Определяющие соотношения Максвелла имеют вид:
·
σ + λ σ = 2µD,
(1.1)
где D – тензор деформации скорости, λ, µ – индифферентные скалярные
характеристики материала, λ* = λ, µ* = µ; «*» отмечены величины, определяемые наблюдателем системы отсчета, движущейся относительно
исходной. Наличие производной σ тензора напряжений Коши в левой
части уравнения приводит к нарушению требования индифферентности
ОС (1.1). Действительно, в соответствии с требованием независимости
от выбора системы отсчета (аксиома № 3 [35, 50]) вид уравнения не дол23
жен меняться при замене системы отсчета (или наложении жесткого
движения). Тогда из (1.1) должно следовать
σ ∗ + λ∗σ ∗ = 2µ∗ D∗ .
Учитывая, что σ ∗ = O T ⋅ σ ⋅ O , D∗ = OT ⋅ D ⋅ O , дифференцируя σ ∗
по времени и подставляя в последнее соотношение, получаем
·
O T ⋅ [σ + λ (σ + Ο ⋅ Ο T ⋅ σ + σ ⋅ Ο ⋅ Ο T )] − 2µD] ⋅ O = 0,
откуда следует (в силу произвольности O)
·
σ + λ (σ + Ο ⋅ Ο T ⋅ σ + σ ⋅ Ο ⋅ Ο T ) = 2µD .
Последнее соотношение, как нетрудно видеть, не совпадает по виду
·
с ОС (1.1). Причина кроется в неиндифферентности производной σ
(несмотря на индифферентность σ ).
Выход из данной ситуации в большинстве работ по геометрически
·
нелинейным ОС заключается в замене материальной производной σ на
независящую от выбора системы отсчета производную (коротационную
или конвективную) σ r . В этом случае определяющее соотношение (1.1)
принимает вид
σ + λσ r = 2µD.
(1.2)
Напомним, что коротационные и конвективные производные определяются как скорости изменения параметров, фиксируемые подвижным наблюдателем, в первом случае – в жесткой, во втором – в деформируемой подвижной системе отсчета. При этом следует отметить
трудности применения конвективных производных, связанные со сложностью отделения изменения параметров за счет физических причин
(воздействий) от изменений вследствие деформирования базиса.
При малых квазижестких поворотах (и малых скоростях этих поворотов) соотношение (1.2) сводится к (1.1). Возникающая при таком
подходе к обобщению ОС неединственность определения независимых
от выбора системы отсчета мер скоростей напряжений, деформаций
24
и других параметров разрешается с привлечением дополнительных гипотез и физического анализа [31].
Следует отметить сложность и важность решения данного вопроса, поскольку физически необоснованный выбор объективных производных может привести к качественно неверным результатам, зачастую
трудно выявляемым на предварительной стадии оценки модели. При
этом самым сложным является вопрос определения «движения без жесткого вращения» сплошной среды. Данный вопрос в исследованиях по
нелинейной механике часто подменяется проблемой независимости ОС
от выбора системы отсчета. Конечно, последнее требование должно
быть выполнено; как показано выше, осуществить его выполнение достаточно просто. Однако это не снимает вопроса о выборе меры поворота
при обобщениях геометрически линейных соотношений на случай
больших градиентов перемещений. Действительно, в общем случае
движения деформируемой среды невозможно выделить тройку некомпланарных материальных волокон, сохраняющих свою взаимную ориентацию в течение всего исследуемого процесса движения. (При наличии такой совокупности материальных волокон меру ротации тройки
единичных векторов, направленных вдоль этих волокон, можно с полным основанием считать мерой жесткого поворота). При произвольном
движении деформируемой среды любая выбранная тройка волокон испытывает изменение углов между ними.
В связи с этим в нелинейной механике часто применяется понятие
квазитвердого движения, вводимого для принятого представления
движения среды совокупностью квазитвердого и деформационного
движений. Именно мера последнего вводится в определяющее соотношение как эквивалент меры деформаций в геометрически линейном ОС.
Ортогональная тензорзначная функция, характеризующая поворот
в квазитвердом движении, используется затем при определении коротационных производных. Заметим, что данный подход тоже не может
претендовать на единственность. Однако в любом случае введение мер
квазитвердого движения, способа обобщения геометрически линейного
ОС на случай больших градиентов перемещений, анализ принимаемых
при этом гипотез должны предшествовать экспериментальным исследованиям и лежать в основе программы экспериментов, учитываться при
интерпретации и обработке опытных данных.
25
1.2. КЛАССИЧЕСКИЙ И ОБОБЩЕННЫЕ КОНТИНУУМЫ
Под обобщенными континуумами (ОК) в широком смысле этого
термина будут пониматься все тела, не описываемые классическими
теориями механики сплошной среды (МСС) (и МДТТ – в частности).
Заметим, что само название определяет класс тел – это именно континуальные модели. Прежде чем переходить к рассмотрению сути обобщенных континуумов, необходимо сформулировать и попытаться ответить
на некоторые вопросы (на первом этапе – общего характера).
Прежде всего, а не плодим ли мы новые сути без нужды (Оккама)?
Не является ли введение ОК желанием построить очень сложную для
понимания теорию (уже в силу этого вызывающую уважение к ее авторам), с использованием которой в дальнейшем можно будет получать
красивые результаты, объяснить которые не в состоянии ни авторы теорий, ни их последователи? Если же такие теории все-таки необходимы,
то в каких процессов и для каких сред? Каковы области применимости
той или иной теории, что от нее можно ожидать, а чего она в принципе
не способна описать? Каков должен быть предварительный физикомеханический анализ, чтобы решить вопрос о необходимости применения ОК и конкретном выборе теории ОК? В случае отсутствия полностью адекватной изучаемому материалу и процессу его деформирования
теории ОК каково должно быть направление модификации, наиболее
близкой для достижения поставленных целей и задач модели ОК?
Конечно, трудно рассчитывать на сиюминутные ответы на все поставленные вопросы, но исследователи, занимающиеся ОК, должны таки ставить подобные вопросы и искать на них ответы.
Рассмотрение в данном параграфе ограничим поликристаллическими металлами и сплавами, для начала – испытывающими только упругие искажения, класс воздействий – только деформационными. Для
таких материалов классические континуальные модели, как показано
многочисленными экспериментами, в ряде задач (например, при исследовании усталостной прочности) не дают результатов, удовлетворяющих современным запросам техники. Причину исследователи видят
в высоких градиентах напряжений (деформаций), являющихся порождением существенной неоднородности материалов (мезо- и микроструктурой). Таким образом, одна из областей, где требуется применение
ОК, – это задачи, в которых нельзя пренебрегать градиентами параметров модели (напряжений, деформаций и т.д.). Попутно заметим, что, ве26
роятно, именно поэтому «оселком» для тестирования моделей ОК выбираются примеры типа задачи Кирша (1898) (растяжение бесконечной
пластины, ослабленной малым круговым вырезом). Конечно, здесь возникает вопрос: а почему при нынешнем уровне развития вычислительной
техники не работать на таких размерах, чтобы градиентами параметров
можно было бы пренебречь? Однако даже для не самых сложных задач
это может потребовать ресурсов нескольких суперкомпьютеров; кроме
того, в ряде задач (например, с сингулярностями) этот путь принципиально неприемлем. Во-вторых, можно придти к таким малым масштабам, что идентификация модели может оказаться весьма проблематичной. В-третьих, как представляется, модели ОК принципиально богаче,
чем модели классических континуумов (КлК), поскольку в них присутствуют новые степени свободы, которые не появятся в модели КлК при
каком угодно дроблении сетки.
Другой класс проблем, где, как представляется, нельзя обойтись моделями КлК, – это задачи, в которых требуется описание микроструктуры
материала. К таким проблемам относятся задачи описания текстурообразования, интенсивного пластического деформирования (ИПД) в обработке
металлов давлением (в том числе подготовка материала для сверхпластического деформирования (СПД)), получения субмикрокристаллических
материалов, деформирование в режиме сверхпластичности (СП).
Таким образом, в первом приближении получены ответы на первые три вопроса. Чтобы сформулировать ответы на остальные, необходимо ознакомиться с содержанием, основными гипотезами, положениями конкретных теорий, чему посвящено дальнейшее изложение.
Прежде чем рассматривать конкретные теории, следует отметить,
что всем моделям ОК присуще одно из двух или оба отличия от КлК, которые мы условно назовем «динамическим» и «кинематическим». Первое
из них связано с заменой широко используемой в КлК гипотезой о действии одной части тела на другую только распределенной нагрузкой; иначе
говоря, это действие в каждой точке сводится только к вектору напряжений. Вероятно, впервые об этом написал В. Фойгт в своей статье 1887 года
[181]. Он предложил модифицировать гипотезу Коши следующим образом: действие одной части тела на другую (или внешних тел на рассматриваемое тело) в каждой точке воображаемой (или реальной) границы (внутренней или внешней) тела с единичной нормалью n определяется вектором
напряжений tn и вектором моментных напряжений µ̂ n.
27
Конечно, с точки зрения формальной ничто не мешает заменить
одну гипотезу другой, тем более, что заменяющая в данном случае шире
заменяемой, в определенном смысле поглощает ее. При этом появляется
возможность в реальных телах и процессах оценить эффекты, вносимые
расширением гипотезы. Однако в физике и механике необходимо добиваться достаточно ясного физического смысла всех вносимых параметров, переменных. Предположим, что рассматриваемое физическое тело
представляет собой конгломерат взаимодействующих между собой частиц, причем не важно, какого масштабного уровня, это могут быть
и атомы, и молекулы, и субзерна, зерна поликристалла; важно лишь,
чтобы для рассматриваемого материала (и процесса деформирования)
эти взаимодействия можно было свести к взаимодействию только соседних частиц (по сути, эта гипотеза всегда эксплуатировалась в МСС
и весьма правдоподобна) и что эти взаимодействия являются центральными. По сути, речь идет о широко используемой модели «шарики –
пружинки». Мысленно введем некоторую поверхность, рассекающую
эти связи. Приведем сосредоточенные силы, действующие со стороны
частиц с одной из сторон тела (назовем ее «отброшенной), разделенных
введенной поверхностью, на частицы второй части к распределенным
нагрузкам (вектору напряжений). Если на масштабах, сопоставимых
с масштабом осреднения (континуализации), отсутствует корреляция
между положением точки на разделяющей поверхности и хотя бы одной
из компонент вектора напряжений (или исследователя по роду задачи
не интересуют следствия такой корреляции), то распределенные напряжения могут быть приведены на данном масштабе осреднения только к
вектору напряжений (конечно, постоянному в каждый момент процесса)
на площадке осреднения. В противном случае необходимо или: 1) переходить на более низкий масштабный уровень (осреднения), или 2) вводить дополнительные силовые факторы, с достаточной для рассматриваемой задачи полнотой определяющих взаимодействия разделенных
частей тела. Заметим, что указанная корреляция в зависимости от микроструктуры материала и процесса деформирования может наблюдаться
на одних масштабах и отсутствовать на других; например, на характерных масштабах, сопоставимых с размерами зерен и субзерен, такая корреляция скорее всего будет иметь место; если же перейти к осреднению
с «окном» порядка представительного макрообъема, то корреляция может
и исчезнуть. Этот характерный размер (масштаб), на котором указанная
корреляция имеет место, будем называть «радиусом корреляции».
28
К «кинематическому» отличию здесь мы будем относить расширение степеней свободы континуума. Наиболее общим вариантом ОК
по отношению к этой составляющей, как представляется, являются модели с конечным числом внутренних переменных произвольной природы и (тензорной) размерности, характеризующих микроструктуру материала, дислокационную субструктуру и т.д. В частности, при соответствующей физической трактовке к внутренним переменным можно
отнести меры вращательных степеней свободы (континуум Коссера),
микродеформаций (микроморфные континуумы), вторые и более высокого порядка градиенты вектора перемещений (материалы 2-го и более
высоких порядков; материалы 2-го порядка в литературе часто называют градиентными). Следует отметить, что в этом случае в теории могут
появиться термодинамически сопряженные новым кинематическим параметрам силовые факторы, т.е. появляется и «динамическое» отличие.
В каких же случаях возникает потребность во введении дополнительных степеней свободы? Во-первых, есть чисто формальная причина
их возникновения при использовании термодинамического подхода
к формулировке конститутивной модели – необходимость выполнения
термодинамических ограничений и для континуумов с расширенными
силовыми взаимодействиями, в силу чего появляются сопряженные
с ними кинематические характеристики. Во-вторых, это связано с необходимостью рассмотрения изменения микроструктуры при сохранении
возможности решать краевые задачи для реальных физических объектов, рассматриваемых в рамках континуального представления.
Рассмотрение ОК начнем с модели Койтера (МК) [17] как наиболее простой модели ОК. По существу, в этой модели учтен только первый, «динамический» аспект. Пусть на тело В, занимающее в актуальной конфигурации область Vˆ с границей Ŝ , действуют объемные (массовые) силы f̂ и моменты m̂ , поверхностные силы t̂ и моменты µ̂ .
Тогда уравнения равновесия имеют обычный вид:
∫ ρ̂fˆdVˆ + ∫ tˆdSˆ = 0 ,
Vˆ
Ŝ
ˆ dSˆ = 0 ,
∫ (r × fˆ + mˆ )ρˆ dVˆ + ∫ (r × tˆ + µ)
Vˆ
(1.3)
Sˆ
где ρ̂ – плотность, r – радиус-вектор точки. Далее обычным образом
(рассматривая равновесие материального тетраэдра и устремляя его
29
размеры к нулю) можно доказать теорему Коши и ее аналог для моментных напряжений:
ˆ
tˆ n = n ⋅ σ, µˆ n = n ⋅ µ,
(1.4)
где σ, µˆ – (несимметричный) тензор напряжений Коши и тензор моментных напряжений соответственно, tˆ n , µˆ n – вектор напряжений
и вектор моментных напряжений, действующие на площадку с единичной внешней нормалью n. Отметим, что использованные в приведенных
выше соотношениях величины имеют следующие размерности:
[ f̂ ] = н/кг, [ t̂ ] = Па, [ m̂ ] = н·м/кг, [ µ̂ ] = [µˆ ] = Па·м. Соотношение (1.4)
справедливо и для элементов поверхности тела, где оно приобретает
следующий вид:
tˆ = n ⋅ σ, µˆ = n ⋅ µˆ ,
(1.5)
где t̂ , µ̂ – заданные распределенные поверхностные силы и моменты.
Предполагая тензоры напряжений и моментных напряжений дифференцируемыми функциями координат, из (1.3) с учетом (1.5), теоремы Гаусса–Остроградского и произвольности объема, получаем уравнения равновесия:
∇ˆ ·σ + ρ̂fˆ = 0,
(1.6)
ˆ = 0,
Є : σ T + ∇ˆ ·µˆ + ρˆ m
(1.7)
где ∇ˆ – оператор Гамильтона (в актуальной конфигурации), Є – тензор
Леви–Чивита. Заметим, что никаких кинематических соображений при
выводе уравнений равновесия не использовалось, совершенно аналогичными последние будут и для континуума Коссера.
Тензор напряжений Коши можно представить суммой симметричной и антисимметричной частей:
1
1
σ = σ s + σ a , σ s = (σ + σ T ), σ a = (σ – σ T ) ,
2
2
(1.8)
при этом антисимметричная часть может быть выражена из уравнения
(1.7) следующим соотношением:
30
1
ˆ) .
σ a = – Є·(∇ˆ ·µˆ + ρˆ m
2
(1.9)
Тензор моментных напряжений можно представить разложением
на девиаторную и шаровую части:
µˆ = µˆ ′ + µˆ g,
1
ˆ
µˆ = I1 (µ),
3
(1.10)
где g – единичный тензор, I1 – первый инвариант. Заметим, что физический смысл такого представления в статье [17] не обсуждается; вероятно, это сделано только с целью исключения из дальнейшего рассмотрения первого инварианта моментных напряжений. Тогда с использованием (1.8)–(1.10) от уравнений равновесия (1.6)–(1.7) можно перейти
к одному (векторному) уравнению равновесия:
∇ ·σ s –
1
ˆ ρˆ m)
ˆ ] + ρˆ fˆ = 0.
Є : [∇ˆ (∇ˆ ·µˆ ′) + ∇(
2
(1.11)
Несколько забегая вперед, отметим, что при подстановке ОС в (1.11)
получим дифференциальное уравнение четвертого порядка относительно
скоростей перемещений, что, в свою очередь, требует увеличения числа
граничных условий до 6 в каждой точке поверхности тела. Как оказывается, это не совсем так, в цитируемой работе показано, что число кинематических граничных условий (в скалярной форме) равно 5.
Кратко остановимся на кинематике. В модели Койтера, как и в любом КлК, вводятся перемещения u и скорости перемещений v, причем
эти величины следует трактовать как осредненные параметры по микрочастицам скользящего представительного объема, отнесенные к его центру масс. По этим полям можно обычным образом определить тензор малых деформаций и тензор деформации скорости соответственно:
1
1
ε = (∇ˆ u + ∇ˆ u T ), D = (∇ˆ v + ∇ˆ v T ).
2
2
(1.12)
Аналогично кинематике КлК можно ввести тензор вихря W и ассоциированный с ним вектор угловой скорости ω :
31
1
1
W = (∇ˆ v – ∇ˆ v T ), ω = – Є : W,
2
2
(1.13)
причем в модели Койтера именно последний вектор отвечает за поворотную моду и является сопряженным вектором к вектору объемных моментов. Иначе говоря, модель Койтера представляет собой так называемый
псевдоконтинуум Коссера. Напомним, что тензор W (а следовательно,
и ассоциированный с ним вектор угловой скорости) определяет угловую
скорость движения материальных волокон, совпадающих в текущий момент времени с главными осями тензора деформации скорости D [31].
Введем также (транспонированный) градиент вектора угловой
скорости, являющийся материальной производной так называемого тензора кривизн-кручений k :
k = ∇ˆ ω T .
(1.14)
Учитывая геометрический смысл тензора вихря W (а следовательно, ассоциированного с ним вектора ω ) и полагая поле градиентов вектора скорости перемещений достаточно гладким, можно трактовать тензор кривизн-кручений как меру относительного вращательного движения двух бесконечно близких триэдров материальных волокон,
направленных вдоль главных векторов тензора деформации скорости.
Тензор k , как нетрудно показать, является девиатором и несимметричным тензором. Таким образом, наряду с представлением движения частицы суммой мгновенных трансляционного движения, квазижесткого
поворота и «чистого» деформирования (теорема Коши–Гельмгольца)
в псевдоконтинууме Коссера появляется еще одно деформационное
движение, характеризуемое тензором кривизн-кручений.
Используя соотношения (1.6)–(1.9), (1.12)–(1.14), можно показать,
что скорость совершения работы над каждой материальной частицей
определяется соотношением:
·
·
ρˆ A = σ s : D + µˆ : k .
(1.15)
Для упругого материала этим соотношением выражается и скорость изменения внутренней энергии, что в дальнейшем используется
для построения определяющих соотношений (гиперупругих или упругих по Грину).
32
Согласно определению гиперупругого (по Грину) материала существует упругий потенциал П, являющийся скалярной функцией мер деформированного состояния, такой, что ее производная по времени равна
скорости изменения удельной (на единицу объема) механической работы. Общий вид П следует из (1.15):
П = П ( ε, k ).
(1.16)
Если вид потенциала известен, определяющие соотношения гиперупругого материала легко устанавливаются:
σ s = ρˆ
∂Π
∂Π
, µˆ ′ = ρˆ
.
∂ε
∂k
(1.17)
Предполагая изотропию материала, приходим к требованию, чтобы потенциал был только функцией квадратичных главных инвариантов
мер деформации, т.е. (ε : g)2 , ε : ε, ε : k , k : k T , k : k , причем третий из
перечисленных инвариантов нарушает условие изотропии и поэтому
должен быть исключен из рассмотрения. Тогда в предположении малых
деформаций получаем по аналогии с потенциалом для классической гиперупругой среды:
ν
ρ 0 Π = G[
(ε : g)2 + ε : ε + 2 l 2 (k : k T + ηk : k )],
1 – 2ν
(1.18)
где G – модуль сдвига, ν – коэффициент Пуассона, l – так называемый
характерный размер материала (о котором мы поговорим несколько
позднее), η – безразмерная величина (в работе Койтера она называется
аналогом коэффициента Пуассона). При этом из требования положительной определенности потенциала вытекают следующие ограничения
на материальные константы: G > 0, 0 < ν < 0,5, –1 < η < 1, l – вещественное число. Из (1.17)–(1.18) легко получаются определяющие соотношения следующего вида:
σ s = 2G (ε +
ν
I1 (ε) g), µˆ ′ = 4Gl 2 (k T + η k ).
1 – 2ν
(1.19)
Остановимся на анализе параметра l – характерного размера материала. Напомним, что k является градиентом вектора поворота, т.е.
первой производной по координатам вектора поворота. Тогда k l можно
33
трактовать как приращение этого вектора поворота на характерном размере, а еще одно умножение на этот размер (вкупе с умножением на
модуль упругости) дает момент на этом же масштабе. Тогда l представляется возможным отождествить с упомянутым выше радиусом корреляции. По крайней мере, это не противоречит качественной картине –
при стремлении радиуса корреляции к нулю моментные напряжения,
как и должно быть, стремятся к нулевым. При этом надо иметь в виду,
что, поскольку рассмотрение осуществляется на одном масштабном
уровне, при решении задач численными или аналитическими методами
следует оперировать размерами, не превосходящими радиус корреляции. В случае неупругого деформирования радиус корреляции, вероятно, становится функционалом процесса, и для него потребуется формулировка эволюционного уравнения.
Остановимся на анализе параметра η , для чего рассмотрим соотношение (1.19) 2 в компонентной форме. Напомним физический смысл
компонент тензора моментных напряжений и геометрический смысл
компонент тензора кривизн-кручений [26]; компоненты будем определять в ортонормированном базисе ik (k = 1,3 ) декартовой системы координат Ох1х2х3. Компоненты kii характеризуют изменение вдоль оси Охi
угла кручения материального объема вокруг той же оси Охi. Компоненты kij (i ≠ j ) характеризуют изменение угла поворота вокруг оси Охi
вдоль координаты хj, т.е. изгиб материального волокна, расположенного
вдоль оси Охj вокруг оси Охi.
Компоненты моментных напряжений µ̂ ii ( Σ ) определяют дейi
ствующую на единицу площадки, перпендикулярной оси Охi, пару сил,
закручивающую материальное волокно вокруг той же оси Охi. Компоненты тензора моментных напряжений µ̂ ij , i ≠ j , определяют действующую на единичную площадку, перпендикулярную оси Охi, пару сил,
изгибающую материальный отрезок вокруг оси Охj.
Для диагональных компонент девиатора моментных напряжений
получим:
µ̂′ii = 4Gl 2 kii (1 + η) ,
Σi .
Если известен характерный размер материала, то с использованием любого из этих соотношений экспериментально может быть оп34
ределен параметр η ; однако его физический смысл при этом остается
невыясненным.
Для недиагональных компонент имеем:
µ̂ ij = 4Gl 2 (k ji k + ηkij ), i, j = 1,3, i ≠ j.
Предположим, что грань с нормалью ij подвергается изгибу вокруг
оси ii, тогда если грань с нормалью ii свободна от изгибающего момента
вокруг оси ij, т.е. µ̂ ij = 0, то эта свободная грань будет испытывать изгиб
вокруг оси ij на величину kij = – 1 k ji . Таким образом, действительно
η
имеет место определенная аналогия с коэффициентом Пуассона в классической теории упругости, однако с заменой диагональных компонент
мер напряженного и деформированного состояния на недиагональные
компоненты.
Как уже отмечено выше, основные соотношения теории Койтера
совпадают с уравнениями широко известного континуума Коссера [83].
Однако в модели Коссера вращательная степень свободы вводится независимо от классической кинематики сплошной среды, т.е. каждой материально частице наряду с поступательными степенями свободы придается возможность совершать независимые вращательные движения, скорость поворота обозначается (аналогично принятому выше обозначению
в модели Койтера) ω. Для формулировки ОС упругого материала, как
правило, используется формализм, идентичный рассмотренному выше.
В последние 10–15 лет опубликовано значительное количество работ, в которых предложены различные варианты расширения континуума Коссера на процессы неупругого деформирования, остановимся
на одной из них [94]. В статье принято несколько иное определение тензора деформации скорости – в духе классических соотношений континуума Коссера (записанных в терминах градиента вектора скорости перемещений) D определяется как сумма градиента скорости перемещений и градиента вектора скорости поворота, т.е. является несимметричным тензором 2-го ранга; здесь не будем останавливаться на деталях
изложения кинематики, уделив главное внимание процедуре формулировки ОС для пластической составляющей меры скорости деформации.
По аналогии с классическими неупругими средами для континуума
Коссера предполагается приемлемой гипотеза об аддитивности скоростей упругих и неупругих составляющих мер скоростей деформаций:
35
·
·
·
D = De + D p , k = k e + k p .
(1.20)
Для пластической составляющей тензора деформации скорости
принимается обычная гипотеза несжимаемости, так что D p = D′ p . Для
·
определения D p и k p в случае неассоциированной модели вводятся пластический потенциал и функция текучести; для ассоциированного закона достаточно ввести функцию текучести, здесь воспользуемся ассоциированным законом. В этом случае также возможны два варианта:
либо использовать одну функцию текучести f (S , µˆ ′, RT ) для определения пластических составляющих тензора деформации скорости и тензора скорости кривизн-кручений, либо ввести две функции текучести
f1 (S , R1T ) и f 2 (µˆ ′, R2 T ) . В первом варианте функция текучести предлагается в виде:
f (S , µˆ ′, RT ) = J 2 (S , µˆ ′) – RT ( λ ),
(1.21)
J 2 (S , µˆ ′) = ( a1S : S + a2 S : S T + b1 µˆ ′ : µˆ ′ + b2 µˆ ′ : µˆ ′T ) ,
где RT – обобщенное «напряжение течения», λ – накопленная мера неупругой деформации,
1
·
·
a
a
b
b ·p p· T 2
λ = 2 1 2 Dp : Dp + 2 2 2 Dp : DpT + 2 1 2 k p : k p +
k : k . (1.22)
b–b
a2 – a1
b1 – b2
a1 – a2
Используя принцип градиентальности, с учетом (1.21) получаем
искомые ОС:
Dp = λ
·
а1S + а2 ST
b µˆ ′ + b2 µˆ ′T
, kp = λ 1
.
J 2 (S, µˆ ′)
J 2 (S, µˆ ′)
(1.23)
Аналогичным образом с применением принципа градиентальности
осуществляется формулировка ОС для варианта с двумя функциями,
вывод которых предоставляется читателю. В последние 10–15 лет наблюдается устойчивый рост интереса к различным неклассическим континуумам, в частности, к градиентным моделям (материалам второго
порядка), в том числе в рамках физических теорий пластичности;
36
с кратким обзором публикаций по этой тематике интересующийся читатель может познакомиться в статье [47].
ВОПРОСЫ К ГЛАВЕ 1
1. Дайте определение физических теорий пластичности.
2. В каких условия возникает необходимость перехода к геометрически нелинейным определяющим соотношениям?
3. Сформулируйте аксиому независимости от выбора системы отсчета.
4. Дайте определения конвективных и коротационных производных.
5. В чем состоит основное отличие коротационных и конвективных производных?
6. Дайте определения квазитвердого и деформационного движения.
7. В каких случаях требуется осуществлять переход к моделям
обобщенных континуумов?
8. В чем состоят основные отличия моделей обобщенных континуумов от классических?
9. Приведите вывод соотношений модели обобщенного континуума В. Койтера.
10. Изложите основные положения модели С. Фореста и Р. Сиверта.
11. Получите определяющие соотношения модели С. Фореста
и Р. Сиверта при использовании двух функций текучести.
37
ГЛАВА 2. МЕХАНИЗМЫ НЕУПРУГОГО ДЕФОРМИРОВАНИЯ
2.1. О ДИСЛОКАЦИОННЫХ МЕХАНИЗМАХ
НЕУПРУГОГО ДЕФОРМИРОВАНИЯ
К числу важнейших «носителей» механизмов неупругого деформирования моно- и поликристаллов относятся одномерные (линейные) дефекты кристаллической решетки – дислокации; без знания этих дефектов,
механизмов их возникновения и взаимодействия с другими дефектами
невозможно понимание физической природы пластической деформации
и сопровождающих последнюю процессов упрочнения – разупрочнения
материалов и других эффектов, наблюдаемых на макроуровне.
Существовавшее в начале XX века предположение о сдвиге атомных плоскостей идеального кристалла относительно друг друга как возможном механизме неупругого деформирования столкнулось с огромным расхождением теоретических и экспериментальных данных. Оценки необходимых для реализации сдвига касательных напряжений (так
называемой теоретической прочности) были получены различными авторами и приведены во многих источниках [30, 32, 147]. Весьма изящный способ определения теоретической прочности на сдвиг был предложен Я.И. Френкелем [30], который рассмотрел сдвиг одной атомной
цепочки относительно другой. Пусть d – расстояние между двумя кристаллографическими плоскостями (совпадающими с плоскостью сдвига), а а – расстояние между атомами в направлении сдвига. При малом
относительном сдвиге х атомных слоев сдвиговое напряжение определяется законом Гука (G – модуль сдвига):
τ=Gx .
d
(2.1)
Очевидно, что в силу периодичности расположения атомов в слоях
смещение одного слоя относительно другого на величину х = а переведет решетку в исходное состояние (при нулевых напряжениях), в силу
чего сдвиговые напряжения можно принять изменяющимися по синусоидальному закону:
(
τ = τ m sin 2πx
38
a
),
(2.2)
где τ m – максимальное сдвиговое напряжение, которое может выдерживать решетка. В предположении малости х/а последнее соотношение можно записать в виде:
τ = τ m 2πx .
a
(2.3)
Полагая, что a d и приравнивая правые части (2.1) и (2.3), получаем
G/ (2π).
искомую оценку так называемой теоретической прочности: τ m
Позднее было получено уточненное значение τ m
G/30.
Несколько с иных позиций вопрос об определении напряжения
сдвига, необходимого для движения дислокации, рассмотрели Пайерлс
и Набарро [55]. Они определили изменение энергетического профиля поверхности скольжения при возникновении возмущений от движения дислокации из одного равновесного положения до другого, также предполагая, что напряжение сдвига, действующее по плоскости скольжения, является периодической функцией относительно смещения соседних
плоскостей. Используя синусоидальное приближение, было показано, что
напряжение страгивания краевой дислокации определяется выражением:
τ П −Н =
2G
2πd
exp −
,
1− v
(1 − v ) а
(2.4)
где v – коэффициент Пуассона, а = b (модуль вектора Бюргерса). Понятно, что полученные оценки являются качественными, позволяющими
оценить порядок величины критического напряжения, соответствующего началу пластического деформирования.
Однако эксперименты, проведенные на широком классе отожженных кристаллов различных металлов, показывают, что значения сдвиговых критических напряжений равны (10–6÷10–4) G. Объяснение этому
было дано в середине 30-х годов нашего столетия, в первую очередь –
в практически одновременно опубликованных в 1934 году работах Тейлора, Орована и Поляньи (результаты были получены авторами независимо друг от друга). Отмеченное несоответствие объяснялось цитируемыми авторами и другими исследователями наличием в кристаллах
специфических линейных дефектов – дислокаций. В этом случае для
осуществления неупругого деформирования нет необходимости одно39
временного разрушения связей всех соседствующих вдоль плоскости
сдвига атомов, достаточно локального разрушения и восстановления
таких связей вдоль линии дислокации по эстафетному механизму. Установление такого типа дефектов в качестве основного «носителя» неупругой деформации позволило существенно улучшить соответствие теоретических и экспериментальных данных.
Два основных типа дислокаций – краевые и винтовые. Основной
характеристикой дислокации является вектор Бюргерса, определяющий
различие замкнутого контура в бездефектном кристалле и замкнутого
контура, окружающего линию дислокации (контур Бюргерса).
Схематично образование краевой дислокации можно представить
следующим образом: в идеальном кристалле делается плоский надрез,
в который вставляется лишняя полуплоскость (экстраплоскость), после
чего системе дают возможность отрелаксировать (рис. 2.1). После релаксации правильное строение кристалла восстанавливается во всем
объеме, за исключением узкой области (с размерами в несколько межатомных расстояний), примыкающей к краю экстраплоскости.
Рис. 2.1. Схема образования краевой дислокации
(экстраплоскость и линия дислокации перпендикулярны плоскости рисунка)
Плоскость, перпендикулярная экстраплоскости и определяемая
нормалью n, называется плоскостью залегания или плоскостью скольжения краевой дислокации; вектор Бюргерса b краевой дислокации расположен в плоскости залегания и определяет направление возможного
движения (скольжения) дислокации. Край экстраплоскости определяет
40
положение линии дислокации, вдоль которой направляется единичный
вектор l , так, что тройка (l, b, n) является правой тройкой. Плоскость
залегания краевой дислокации, таким образом, совпадает с плоскостью
(l, b) . В зависимости от расположения экстраплоскости выделяют положительные и отрицательные краевые дислокации, обозначаемые соответственно как ┴ и ┬. Под действием приложенных напряжений
краевые дислокации могут скользить в плоскости залегания (в направлении вектора Бюргерса), такое их движение называется консервативным,
или двигаться в направлении вектора n (переползать) за счет присоединения к краю экстраплоскости вакансий или межузельных атомов, такое
движение называется неконсервативным. При встрече двух параллельных
краевых дислокаций противоположных знаков они взаимно уничтожаются, аннигилируют, восстанавливая правильное строение решетки.
Винтовую дислокацию схематично вводят обычно следующим
образом: в цилиндрическом бездефектном кристалле делается радиальный надрез до оси цилиндра; вдоль пересечения плоскости надреза
и боковой поверхности цилиндра края надреза смещаются на одно межатомное расстояние и соединяются, после чего дают системе отрелаксировать. В полученной таким образом конфигурации нарушение правильного строения кристалла сосредоточено в узкой области вблизи оси
цилиндра, которая является линией винтовой дислокации и определяется единичным вектором касательной l. Вектор Бюргерса b винтовой
дислокации параллелен линии дислокации. В зависимости от направления вектора Бюргерса по соглашению вводятся положительные и отрицательные винтовые дислокации, обозначаемые как γ и соответственно. Винтовые дислокации противоположных знаков также могут аннигилировать при встрече.
В реальных кристаллах дислокации в общем случае имеют криволинейную форму, в каждой точке линии дислокации могут присутствовать краевые и винтовые составляющие. Часто дислокации представляют собой замкнутые петли. При этом из ФТТ известны следующие
геометрические свойства дислокаций: вектор Бюргерса постоянен в каждой точке данной дислокации; дислокации не могут обрываться в кристалле, они могут либо выходить на поверхность кристалла, либо образовывать замкнутые петли, либо разветвляться; в каждой точке ветвления суммарный вектор Бюргерса исходящих из узла дислокаций равен
нулевому вектору.
41
Несмотря на то, что дислокации не являются равновесными дефектами, в реальных кристаллических материалах всегда присутствует значительное количество дислокаций. Количественной мерой при этом служит плотность дислокаций, определяемая суммарной длиной дислокаций
в единице объема. Даже в хорошо отожженных кристаллах плотность
дислокаций составляет 105–108 см/см3 (см–2), доходя в деформированных
кристаллах до 1012–1014 см–2 (104–106 км в 1 мм3!). Дислокации в кристаллических материалах образуются уже на стадии кристаллизации из расплавов, растворов или газообразной фазы. В процессах термообработки
возможными механизмами образования дислокаций (в виде петель) являются диффузионные процессы, приводящие к возникновению дисков
вакансий (с последующим их «схлопыванием») и межузельных атомов.
Таким образом, основным механизмом пластического деформирования является движение дислокаций. Казалось бы, при достижении
критических напряжений в образце (по крайней мере, монокристаллическом) дальнейшее пластическое деформирование должно продолжаться до каких угодно деформаций при сохраняющейся нагрузке.
Однако для большинства металлов и сплавов даже в опытах на монокристаллических образцах обнаруживается, что для продолжающейся
пластической деформации требуется увеличивать прикладываемую
к образцу нагрузку; иначе говоря, материалы упрочняются в процессе
пластического деформирования. В чем причина такого поведения материалов? Оказывается, что «ответственность» за возникновение различных эффектов упрочнения (и многих других эффектов, отмеченных
в [51]) несут различные механизмы взаимодействия дислокаций с другими дефектами – точечными, линейными, поверхностными и объемными. Следовательно, движущиеся дислокации, встречая на своем пути
другие дефекты, вступают с ними в реакции, во взаимодействие, приводящее к затрудненому движению дислокаций. В связи с этим понимание
указанных процессов является весьма важным для построения ОС, особенно для развитых пластических деформаций.
Выше рассматривались так называемые полные (или единичные,
или совершенные) дислокации с вектором Бюргерса, равным одному из
трансляционных векторов решетки, перенос на который (или n-кратный
перенос) делает конечное состояние решетки неотличимым от исходного. Однако в типичных металлических кристаллах имеются дислокации
с отличными от трансляционных векторами Бюргерса, которые называются частичными дислокациями. Такие частичные дислокации могут
42
взаимодействовать друг с другом с образованием полных дислокаций;
напротив, полные дислокации могут диссоциировать на несколько частичных, т.е. частичные дислокации сами могут рассматриваться как
продукт реакции дислокаций. Рассмотрим более подробно частичные
дислокации на примере ГЦК-кристаллов. В ГЦК-решетке имеет место
следующее расположение атомов (рис. 2.2): первый слой составляют
плотноупакованные «шары», позиция которых в проекции на плоскость
плотнейшей упаковки (111) обозначена буквой А. Положение центров
«шаров» второго слоя в проекции на ту же плоскость обозначены буквой В, третьего – как С, далее соблюдается периодичность (АВС…).
Такое расположение плотноупакованных слоев ГЦК-решетки обозначают как упаковку АВСАВСАВС… . Заметим, что для ГПУ-решетки
имеет место периодичность АСАСАС… .
Рис. 2.2. Расположение атомов ГЦК-кристаллов
в проекции на плоскость (111)
Предположим, что в кристаллической решетке имеется (полная)
краевая дислокация, экстраплоскость которой перпендикулярна плоскости рисунка, ее край совпадает со слоем В, вектор Бюргерса b ( a 2[101] )
перпендикулярен экстраплоскости и расположен в плоскости плотнейшей упаковки (см. рис. 2.2). Единичный акт перемещения полной дис43
локации осуществляется переходом атомов экстраплоскости из положения B в новое положение того же типа В. Однако энергетически выгоднее атомам экстраплоскости вначале перейти в соседнее положение
лунки С (на вектор b1 (a 6[211]) ); при этом локально нарушается «правильная» последовательность АВСАВС, которая на некоторой части
слоев заменяется на последовательность АСАС. Эта часть слоев называется дефектом упаковки и трактуется как поверхностный дефект кристаллической решетки. Затем атомы переходят в новое положение смещением на вектор b 2 (a 6[112]) , восстанавливая «правильное» чередование слоев. Поверхность дефекта упаковки отделяется от остальной
части кристалла выделенной линией, называемой частичной дислокацией и обозначается как и .
Для частичных дислокаций вектор Бюргерса не совпадает с вектором, равным межатомным расстояниям, и не перпендикулярен линии
(краевой) дислокации. Частичные дислокации с вектором Бюргерса, лежащим в плоскости их скольжения, называются дислокациями Шокли;
на рис. 2.2 изображены именно дислокации Шокли с векторами Бюргерса b1 и b2. Совокупность двух частичных дислокаций и дефекта упаковки между ними называется расщепленной дислокацией.
Важнейшей характеристикой способности кристаллического материала к образованию дефектов упаковки (а следовательно, и расщепленных дислокаций) и определяющей ширину дефекта упаковки является
энергия дефекта упаковки ЕДУ (ЭДУ). Численно ЭДУ равна силе отталкивания частичных дислокаций (на единицу длины), или силе поверхностного натяжения дефекта упаковки; чем ниже ЭДУ, тем больше ширина
дефекта упаковки и тем более кристалл склонен к образованию расщепленных дислокаций. Значения ЭДУ существенно различаются для разных
металлов; так, для меди ЕДУ равна примерно 40 эрг/см2, для алюминия –
200 эрг/см2. Легирование металлов, как правило, приводит к существенному снижению ЭДУ; например, для бронз (Cu + Al) с содержанием 4,5
и 7 % Al ЭДУ составляет соответственно 20 и 2 эрг/см2.
Если векторы Бюргерса частичных дислокаций лежат в плоскости
скольжения (частичные дислокации Шокли), то расщепленная дислокация может совершать консервативное движение. В то же время для совершения переползания (например, при преодолении препятствий) требуется стягивание расщепленной дислокации к обычной. Отметим, что
ширина расщепленной дислокации может быть уменьшена до нуля под
действием приложенных внешних и внутренних напряжений, т.е. рас44
щепленная дислокация может быть превращена (стянута) в обычную
дислокацию.
Существуют частичные дислокации, вектор Бюргерса которых не
лежит в плоскости скольжения, в силу чего они не способны к консервативному перемещению (скольжением). К таким сидячим дислокациям
относятся, например, дислокации (или петли сидячих дислокаций)
Франка, которые могут образовываться в результате, например, схлопывания вакансионного диска в плоскости плотнейшей упаковки. Вектор Бюргерса такой дислокации перпендикулярен плоскости плотнейшей упаковки, в силу чего дислокационная петля, окружающая дефект
упаковки, не может скользить в своей плоскости. Дислокации Франка
являются сильными препятствиями для движения других дислокаций.
При движении двух расщепленных дислокаций в пересекающихся
плоскостях скольжения они могут образовывать весьма прочные барьеры (например, барьеры или дислокации Ломера–Коттрелла), запирающие обе системы скольжения; ниже механизм их образования будет
рассмотрен подробнее. С макроскопической точки зрения образование
барьеров Ломера–Коттрелла ведет к существенному увеличению деформационного упрочнения в материалах с низкой ЭДУ по сравнению
с материалами со средней и высокой ЭДУ. По мнению авторов, именно
образование барьеров Ломера–Коттрелла ответственно за эффекты дополнительного упрочнения при сложном циклическом нагружении (см.
гл. 2 [51]); проведенный анализ показал, что именно материалы с низкой
ЭДУ обнаруживают склонность к дополнительному упрочнению.
Выше отмечалось, что дислокации могут разветвляться, что является также одним из видов дислокационных реакций. Напомним одно из
основных правил теории дислокаций – суммарный вектор Бюргерса
дислокаций, вступающих в реакцию (например, ветвящейся дислокации), должен быть равен суммарному вектору Бюргерса образовавшихся дислокаций.
Направление реакции определяется энергетическим критерием
Франка: дислокационная реакция идет в направлении уменьшения
внутренней энергии кристалла. Заметим, что это положение чрезвычайно часто принимается на веру в естествознании: полагается, что природа устроена по принципу минимизации внутренней энергии. В механике
экстремальные принципы также применяются весьма часто, однако их
принято доказывать. В данной ситуации, однако, критерий Франка может быть принят, поскольку он прошел эмпирическую проверку в тече45
ние десятилетий. Поскольку энергия дислокации пропорциональна
квадрату ее вектора Бюргерса, критерий Франка иначе может быть
сформулирован следующим образом: дислокационная реакция происходит в направлении уменьшения суммы квадратов векторов Бюргерса
получающихся дислокаций в сравнении с суммой квадратов векторов
Бюргерса исходных дислокаций.
Таким образом, если через bi0 , i = 1, I обозначить векторы Бюргерса дислокаций, вступающих в реакцию, а через b fj , j = 1, J – получившихся в ее результате, то должно выполняться соотношение
I
J
i =1
j =1
∑ bi0 = ∑ bfj ,
причем реакция произойдет только в том случае, если выполняется критерий Франка:
I
∑b
i =1
0 2
i
J
≥ ∑ b fj
2
.
(2.5)
j =1
В частности, указанным правилам подчиняются реакции диссоциации полных дислокаций на частичные, объединения частичных дислокаций в полные; критерий Франка объясняет, например, распад n-кратной
дислокации на n единичных.
Для наглядности анализа реакций дислокаций в кубических кристаллах широко используется так называемый стандартный тетраэдр Томпсона
(СТТ). Рассмотрим построение СТТ на примере ГЦК-кристаллов с параметром решетки а. В качестве вершин тетраэдра выберем одну из вершин
куба (например, в начале координат кристаллографической системы координат (КСК)); три другие вершины совпадают с ближайшими к началу
КСК центрами граней; иначе говоря, в терминах кристаллографических
координат вершины тетраэдра определяются векторами:
Α = a 2[101], Β = a 2[011], Γ = a 2[110], ∆ = [000] . Грани тетраэдра представляют собой равносторонние треугольники с длиной стороны a 2 . Центры граней, противоположных вершинам A, B, Г, ∆ ,
обозначим соответствующими строчными буквами греческого алфавита α, β, γ, δ . Теперь разрежем тетраэдр вдоль всех ребер, содержащих
46
вершину ∆ , и развернем его в плоскости грани АВГ (рис. 2.3). Все
грани СТТ принадлежат системе кристаллографических плоскостей
{111} плотнейшей упаковки (АВГ – (111), ΑΓ∆ – (111), Β∆Γ – (111),
Α∆Β – (1 11) ). Ребра тетраэдра Томпсона равны векторам Бюргерса
полных дислокаций:
( ΑΒ = a 2[110], ΒΓ = a 2[1 0 1], Γ∆ = a 2[1 1 0 ], ∆Α = a 2[101] ).
Частичные дислокации Шокли с векторами Бюргерса системы
а/6 <112> соответствуют векторам, соединяющим вершины тетраэдра
с центрами принадлежащих им граней, например,
Αβ = a / 6[11 2], Aδ = a / 6[1 2 1], Bδ = a / 6[2 1 1], ∆γ = a / 6[112],
δΓ = a / 6[11 2], γA = a / 6[211].
Рассмотренная выше реакция расщепления полной дислокации на
частичные дислокации Шокли a [1 0 1] = a [2 11] + a [11 2] в обозна2
6
6
чениях СТТ представляется в виде: ΒΓ = Βδ + δΓ (см. рис. 2.3).
Рис. 2.3. Развертка на плоскости стандартного тетраэдра Томпсона
Сидячие дислокации Франка имеют вектор Бюргерса, перпендикулярный плоскостям плотнейшей упаковки. В обозначениях СТТ векторы Бюргерса дислокаций Франка обозначаются как αΑ, βΒ, γΓ, δ∆,
47
Αα, Ββ, Γγ, ∆δ. Дислокации Франка, взаимодействуя с частичными
дислокациями Шокли, могут порождать полные дислокации, например, Αα + αΒ = ΑΒ .
Выше уже упоминался один из известных механических эффектов – так называемое дополнительное циклическое упрочнение [51], которое испытывают некоторые материалы при сложном циклическом нагружении. Как показал проведенный анализ, склонность к данному эффекту проявляют материалы с низкой ЭДУ, для которых характерно
наличие расщепленных дислокаций. Одним из возможных механизмов
появления дополнительного упрочнения при сложных нагружениях
(в том числе сложных циклических) авторы считают образование дислокаций (или барьеров) Ломера–Коттрелла, в связи с чем целесообразно
остановиться на этой реакции более детально [32].
Предположим, что в плоскости ΑВ∆ (1 1 1 ) расположена дислокация ∆В (а/2[0 1 1]), а в плоскости АВГ (1 1 1) – дислокация ВГ
(а/2[0 1 1 ]), способные скользить в своих плоскостях, будучи параллельными линии пересечения плоскостей ВА. Известно, что такие дислокации взаимно притягиваются. В материалах с низкой ЭДУ полные
дислокации испытывают склонность к расщеплению; в данном случае
дислокация ∆В расщепляется согласно реакции ∆В = ∆γ + γВ (а/2[0 1 1] =
= а/6[1 1 2]+ а/6[ 1 1 2]) на две частичные дислокации Шокли и дефект
упаковки между ними (рис. 2.1.3). Пусть в плоскости АВГ дислокация
ВГ расщепляется по схеме ВΓ = Вδ + δΓ (а/2[1 0 1 ] = а/6[2 1 1 ]+
+ а/6[1 1 2 ]). Плоскости скольжения этих двух расщепленных дислокаций пересекаются по ребру АВ, при этом частичные дислокации γВ
и Вδ испытывают взаимное притяжение. Поэтому дислокации продвигаются к линии пересечения рассматриваемых плоскостей АВ и вступают в реакцию γВ + Вδ = γδ (а/6[ 1 2 1]+ а/6[2 1 1 ] = а/6[1 1 0])
с образованием частичной дислокации βδ , называемой вершинной
(или удерживающей) дислокацией. Вектор Бюргерса вершинной дислокации а/6 [1 1 0] и ее линия [1 1 0] перпендикулярны и расположены
в одной плоскости (001), т.е. дислокация является краевой. Нетрудно
проверить, что такая реакция удовлетворяет критерию Франка. В результате получается совокупность трех частичных дислокаций (вершинной и двух дислокаций Шокли) и двух дефектов упаковки, распо48
ложенных в пересекающихся плоскостях. Такой клиновидный дефект
и называется дислокацией (барьером) Ломера–Коттрелла. Дислокация
Ломера–Коттрелла не может скользить, поскольку все три частичные
дислокации имеют различные плоскости залегания, в силу чего они
являются мощными препятствиями для других дислокаций в двух пересекающихся плоскостях, содержащих частичные дислокации Шокли. Такие сидячие дислокации присущи материалам с низкой ЭДУ, таким, например, как нержавеющие стали, бронзы.
2.2. ВЗАИМОДЕЙСТВИЯ ДИСЛОКАЦИЙ
С ДИСЛОКАЦИЯМИ И ТОЧЕЧНЫМИ ДЕФЕКТАМИ
Каждая из дислокаций обладает собственным полем напряжений.
В силу быстрого затухания искажений кристаллической решетки при
удалении от ядра дислокации для определения полей напряжений можно использовать линейную теорию упругости (следует учитывать, что
вблизи ядра дислокации предпосылки линейной теории упругости малоприемлемы, поэтому полученным решением можно пользоваться
только на определенном удалении от ядра, как правило, – не менее 1,5–2
межатомных расстояний). Задача определения полей напряжений в этом
предположении была решена Вольтерра еще в 1907 году. Для краевой
дислокации при записи будем использовать две системы координат: декартову ортогональную Ох1х2х3 (ось Ох3 направлена вдоль оси дислокации, ось Ох1 – вдоль вектора Бюргерса, ось Ох2 – вдоль нормали к плоскости скольжения) и цилиндрическую (r, z, θ), где ось z совпадает с Ох3,
r – расстояние от оси дислокации, угол θ отсчитывается от плоскости
скольжения. Тогда компоненты (в декартовой ортогональной системе
координат) тензора собственных напряжений краевой дислокации определяются соотношениями [27, 32]:
x2 ( x22 + 3 x12 )
x2 ( x12 – x22 )
,
σ
=
D
22
c2
c2
x ( x2 – x2 )
σ12 = D 1 1 2 2 , σ33 = ν (σ11 + σ 22 ),
c
σ11 = – D
или в виде
49
σ11 = − ( D / r ) sinθ (2 + cos2θ), σ 22 = ( D / r ) sinθ cos2θ,
σ33 = ν(σ11 + σ 22 ), σ12 = ( D / r ) cosθ cos2θ , σ13 = σ 23 = 0,
D = Gb / ((2π(1 − ν)),
где с = ( x12 + x22 ) , G – модуль сдвига, ν – коэффициент Пуассона.
Достаточно просто (по полю перемещений) получить компоненты
тензора напряжений винтовой дислокации. Направим ось Ох3 вдоль оси
дислокации, оси Ох1 и Ох2 расположены в перпендикулярной плоскости. Тогда компоненты тензора напряжений Коши в декартовой ортогональной системе координат определяются как
σ13 = –
Gb
x2
Gb
x1
, σ 23 =
,
2
2
2
2π x1 + x2
2π x1 + x22
остальные компоненты равны нулю. Нетрудно видеть, что компоненты
напряжений при удалении от ядра дислокации убывают обратно пропорционально расстоянию. При нагружении тела с дислокациями последние взаимодействуют собственными полями напряжений как с приложенными напряжениями, так и с полями напряжений других дислокаций (равно как и полями напряжений других типов дефектов); силы
взаимодействия достаточно подробно рассматриваются во многих монографиях и учебных пособиях по ФТТ (например, [27, 32, 55]).
Следует отметить, что при приближении дислокации к свободной
поверхности кристалла напряжение от дислокации и ее энергия падают,
поскольку свободная поверхность не оказывает сопротивления движению дислокации. В силу этого дислокация притягивается к свободной
поверхности; для математического описания этого явления используются фиктивные дислокации противоположного знака, расположенные соответствующим образом за свободной поверхностью (так называемые
дислокации изображения), так что суммарное напряжение от двух дислокаций на свободной поверхности удовлетворяет тривиальным статическим граничным условиям. Заметим, что для моделирования данного
эффекта при использовании соотношений макрофеноменологических
теорий пластичности (например, теории пластического течения) для областей, примыкающих к границе образца, принимается пониженное
значение напряжения течения.
50
Краевые дислокации, расположенные в перпендикулярных плоскостях, не взаимодействуют своими полями напряжений, в силу чего
они могут как угодно близко подходить друг к другу и пересекаться.
Рассмотрим две краевые дислокации с векторами Бюргерса b1 и b2,
плоскости скольжения которых ортогональны. Первую дислокацию будем считать подвижной, вторую – неподвижной. При пересечении первой дислокацией второй происходит локальное перестроение в окрестности ядер дислокаций. При этом если вектор Бюргерса первой дислокации b1 перпендикулярен вектору b2, то на второй дислокации
образуется ступенька краевой ориентации b2 в направлении b1 и величиной, равной модулю вектора b1, первая дислокация при этом остается
неизменной; ступенька представляет собой участок краевой дислокации. Если же векторы Бюргерса b1 и b2 параллельны друг другу, то при
пересечении на каждой из дислокаций образуются так называемые перегибы, направление и величина которых равны вектору Бюргерса пересекающей дислокации; перегибы имеют винтовую ориентацию. Таким образом, пересечение дислокаций ведет к увеличению их длины, а
следовательно, – энергии упругих искажений решетки вблизи ядра дислокации; для продвижения прореагировавших дислокаций требуется
повышенное значение напряжения, что позволяет говорить о деформационном упрочнении при пластическом деформировании. В то же время
ступеньки и перегибы могут существенно облегчать соответственно
процессы переползания и скольжения дислокаций при своем движении
вдоль линий дислокаций. Связано это с тем, что потенциальный барьер для
локального перемещения ступеньки и перегиба существенно меньше потенциального барьера соответственно переползания и консервативного перемещения дислокаций как целого; в силу этого и требуемые для перемещения ступеньки и перегиба напряжения значительно ниже значений критических напряжений для движения дислокаций как целого.
Дислокации взаимодействуют своими полями напряжений с другими дефектами, в том числе с точечными. Как отмечалось в [51], такое взаимодействие является одной из возможных причин эффекта
Портвена – Ле Шателье. Часть физиков связывают с этими взаимодействиями появление «зуба текучести» [51]. Используя введенную выше
цилиндрическую систему координат, энергию Птд взаимодействия
краевой дислокации с примесным атомом (точечным дефектом) можно
записать как [32]
51
П тд =
4 1+ ν G b ∆ Ro3 sin θ
,
3 1– ν
r
(2.6)
Rп – Ro
, Rп – атомный
Ro
радиус примеси. Силы взаимодействия определяются частными производными потенциальной энергии по координатам цилиндрической системы координат r и θ :
где Rо – радиус атомов основного материала, ∆ =
∂П тд 4 1+ ν G b ∆ Ro3 sin θ
Fr = –
=
,
r2
3 1– ν
∂r
1 ∂П тд
4 1+ ν G b ∆ Ro3 co s θ
Fθ = –
=–
.
r ∂θ
3 1– ν
r2
(2.7)
Приведенные соотношения, конечно, справедливы только в области выполнения принятых при их выводе гипотез и не могут напрямую
использоваться при построении ОС на макроуровне. Однако в последние годы все большее распространение получают методы дислокационной динамики, клеточных автоматов, в которых рассмотренные соотношения играют главную роль.
2.3. ДЕФОРМИРОВАНИЕ МОНОКРИСТАЛЛА ДВОЙНИКОВАНИЕМ
Основным механизмом неупругого деформирования в физических
теориях пластичности является движение краевых дислокаций, что подтверждено многочисленными экспериментами. Двойникование не является преобладающим видом неупругого деформирования в металлах
с большим числом систем скольжения (ГЦК- и ОЦК-кристаллы) и в основном происходит в металлах, в которых скольжение дислокаций по
некоторым СС ограничено (ГПУ-кристаллы). Однако экспериментально
установлено, что деформирование двойникованием происходит также
в ОЦК- и ГЦК-металлах при низких гомологических температурах,
в материалах с низкой энергией дефекта упаковки и при повышенных
скоростях деформирования. Появление двойников приводит к значительному изменению отклика материала, поскольку двойники являются
эффективным препятствием для движения краевых дислокаций. Поэтому для указанных классов кристаллов при моделировании упругопла52
стического деформирования необходимо учитывать не только движение
краевых дислокаций, но и двойникование как механизм неупругого деформирования и как механизм упрочнения.
Двойник может быть образован посредством сдвига, иллюстрация такого типа двойникования показана на рис. 2.4 (заметим, что в физических теориях пластичности для описания двойникования обычно и
используется представление деформирования за счет сдвига, величина
которого фиксирована для каждого типа решетки, тогда сдвиговая деформация определяется объемной долей двойников). Для рассмотрения
механического двойникования в металлах введем следующие общепринятые обозначения: K1 – плоскость двойникования (габитусная плоскость), остающаяся неискаженной при двойниковании; η1 – направление
двойникового сдвига; K2 – вторая неискаженная (инвариантная) плоскость; η2 – направление, лежащее в плоскости K2 и плоскости сдвига S,
перпендикулярной плоскости двойникования K1 и содержащей направление сдвига η1.
Рис. 2.4. Элементы двойникования
При двойниковании кристалла должны выполняться следующие
критерии:
– две плоскости остаются неискаженными: плоскость двойникования K1 и инвариантная плоскость K2;
– инвариантная плоскость K2 образует с плоскостью K1 до и после
двойникования одинаковые двугранные углы.
Рассмотрим кристаллогеометрию основных типов кристаллов –
ГЦК, ОЦК и ГПУ. В случае правильной упаковки в ГЦК-металлах последовательность атомных слоев имеет вид ABCABCABC… При двойниковании она меняется ABCABACBA… Двойниковый сдвиг, равный
0,707, происходит по направлениям <112> и плоскостям {111} (рис. 2.5).
53
Перечислим элементы двойникования согласно введенным выше обозначениям:
K1 = (111) ,
η1 = 112 ,
K 2 = (11 1 ) ,
η2 = [112] .
Двойниковый переход удобнее всего наблюдать в сечении, перпендикулярном плоскости двойникования. На рис. 2.5 показан двойниковый
сдвиг в направлении 112 , создающий противоположную последовательность упаковки слоев по сравнению с первоначальной, так что решетка двойника является зеркальным отражением основной матрицы.
Рис. 2.5. Геометрия двойникования в ГЦК-решетке:
1 – положения атомов до двойникования; 2 – положения
совпадающих атомов; 3 – двойниковые положения атомов
В ОЦК-решетках плоскости упакованы в последовательности
ABCDEFABCDEF и если в этой структуре задать смещение в направлении 1 11 , то образуется дефект упаковки ABCDEFEFABCD… Для образования двойникового кристалла указанную операцию необходимо
проделать на каждой последующей плоскости двойникования, чтобы
получить последовательность упаковки ABCDEFEFDCBA. Индексы
двойникования ОЦК-структур имеют вид:
54
K1 = (112 ) ,
η1 = 1 11 ,
K 2 = (112 ) ,
η2 = [111] .
Величина двойникового сдвига равна 0,707. Двойник схематически изображен на рис. 2.6.
Рис. 2.6. Геометрия двойникования в ОЦК-решетке
(темными точками обозначены атомы в плоскости чертежа,
светлыми – выше или ниже плоскости чертежа)
В ГПУ-кристаллах обнаружено достаточно много типов двойников,
тип которых зависит от величины анизотропии кристалла c/a (а – длина
стороны правильного шестиугольника в базисной плоскости, c – высота
призмы), чем меньше это соотношение, тем больше способов двойникования [16]. Гексагональные кристаллы двойникуются по системам:
K1 = (10 12 ) ,
η1 = 1011 ,
K 2 = (10 12 ) ,
η2 = 10 11 .
Величина и направление сдвига зависят от соотношения c/a, однако величина сдвига всегда является относительно (кубических кристаллов) небольшой и изменяется в пределах от 0,175 (c/a = 1,89, Cd) до
0,199 (c/a = 1,59, Be). Следует заметить, что в данном случае описать
движение атомов с помощью сдвига невозможно [16]. На рис. 2.7 изображена геометрия двойникования в ГПУ-кристаллах, стрелками соединены начальные положения атомов до двойникования с ближайшими
к ним атомами в двойнике (доказательства того, что атомы движутся
в процессе двойникования по этим путям, отсутствуют).
55
Рис. 2.7. Геометрия двойникования в ГПУ-решетке
(темными точками обозначены атомы в плоскости чертежа,
светлыми – выше или ниже плоскости чертежа)
В литературе (например, [55, 56]) обсуждаются дислокационные
механизмы, которые должны действовать в процессе двойникования.
Важным классом таких дислокационных механизмов являются полюсные механизмы, которые впервые были предложены Котреллом и Билби
для ОЦК- и ГЦК-металлов, а для ГПУ – Томпсоном и Миллардом [55].
Рассмотрим этот механизм на примере ОЦК-кристалла. Краевая реше1
точная дислокация 1 1 1 способна расщепляться по реакции [55]:
2
1
1
1
1 1 1 → 1 12 + 1 11 ,
2
3
6
(2.8)
при которой изменение упругой энергии в первом приближении равно
нулю, и согласно критерию Франка такая реакция возможна. Эта реакция может проходить при приложенных внешних напряжения и низкой
энергии дефекта упаковки. Частичная дислокация (двойникующая)
1
1 11 (направление η1) способна скользить как в плоскости двойни6
кования (112 ) (плоскость K1), так и в плоскости сдвига (12 1 ) (плос56
кость S). При этом частичная дислокация закручивается вокруг полюс1
ной дислокации 1 12 , создавая спираль и дефект упаковки по по3
следовательным плоскостям двойникования
Одним из важнейших параметров, определяющих зарождение
и развитие двойников в кристалле, является энергия дефекта упаковки
(ЭДУ). Напомним, что ЭДУ численно равна силе отталкивания частичных дислокаций и определяет ширину дефекта упаковки; чем ниже
ЭДУ, тем больше ширина дефекта упаковки. В материалах с высокими
значениями ЭДУ расщепленные дислокации практически отсутствуют
(частичные дислокации «стягиваются» в полную). Отметим, что важнейшим этапом в образовании двойника, согласно приведенному выше
механизму, являлась диссоциация полной дислокации на частичные.
Вследствие этого в кристаллах с высокими значениями ЭДУ можно
ожидать, что деформирование двойникованием затруднено и обеспечивается деформированием преимущественно за счет скольжения дислокаций. Напротив, низкие значения ЭДУ способствуют деформированию
двойникованием. Влияние на двойникование также оказывает химический состав металлов (наличие примесей); так, например, добавка кремния к железу приводит к более активному протеканию двойникования
при деформировании [56]. Известно, что примесные атомы приводят
к уменьшению ЭДУ, следовательно, к более интенсивному деформированию двойникованием.
Необходимо также отметить влияние температуры на двойникование. Кристаллография сдвигов дислокаций зависит от температуры испытания [55], поэтому можно ожидать влияния температуры на развитие
двойникования. Из экспериментов известно, что с понижением температуры склонность материала к двойникованию возрастает. Объяснение
можно дать следующим образом: напряжение Пайерлса для полных дислокаций при понижении температуры нарастает быстрее, чем для частичных дислокаций, ответственных за двойникование, что приводит
к затрудненности скольжения. Кроме того, с понижением температуры
падает ЭДУ, что также способствует деформированию двойникованием.
Наряду с температурными воздействиями существенное влияние на
процесс двойникования оказывает скорость деформирования. Экспериментально установлено, что при деформировании со скоростями, меньшими некоторой критической скорости деформирования, двойникование
57
в образцах не происходит. Существование минимальной скорости деформирования, при превышении которой имеет место двойникование,
вероятно, можно объяснить тем, что повышение скорости деформации
приводит к увеличению напряжения деформирования скольжением дислокаций, поэтому в кристалле при определенных скоростях деформации
достигаются критические напряжения двойникования.
2.4. ЗАКОН ШМИДА
При построении упругопластических определяющих соотношений
для монокристалла часто используется формализм теории пластического течения. В последней одним из главных является понятие поверхности текучести. При этом в качестве уравнения, определяющего поверхность текучести монокристалла, обычно используется соотношение
(k ) (k )
(k )
Шмида b n : σ = τ c ,
∑
, которое можно записать в виде:
k
f (s) = m( k ) : s – (± τ(ck ) ) = 0, k = 1, K ,
(2.9)
где K – полное число СС рассматриваемого монокристалла, m ( k ) –
ориентационный тензор k-й СС, m ( k ) = b ( k )n ( k ) ; часто в качестве ориентационного тензора применяется его симметризованная составляющая
1
m ((S)k ) = ( b ( k )n ( k ) + n ( k )b ( k ) ) . Первоначально закон Шмида применялся
2
только для определения момента начала неупругого деформирования
кристаллитов, позднее он стал использоваться для произвольного момента деформирования, при этом критические напряжения τ (ck ) для каждой СС зависят от истории деформирования, и для их определения
требуется формулировка соответствующих эволюционных уравнений –
законов упрочнения СС (см. п. 2.5).
Отметим, что в (2.9) полагается равенство пределов текучести
в k-й системе скольжения при «прямом» и «реверсивном» нагружении,
и тогда модель не будет описывать хорошо известный эффект Баушингера [51]. Как этого избежать? Указанное ограничение может быть легко
устранено путем переопределения понятия системы скольжения, когда
система скольжения определяется нормалью к плоскости скольжения
и «положительным» или «отрицательным» направлениями скольжения
58
в ней краевых дислокаций, т.е. осуществляется удвоение числа систем
скольжения:
f (s) = m ((S)k ) : s – τ (ck ) = 0, k = 1, 2 K .
(2.10)
Далее под K будет пониматься именно число систем скольжения,
равное удвоенному числу кристаллографических систем скольжения.
Другим вариантом, не требующим удвоения числа СС, является переход
к комбинированному закону упрочнения, введение для каждой СС дополнительного параметра – «остаточных микронапряжений», и эволюционного уравнения для него.
Полагая неизменным положение кристаллографических осей (при
рассмотрении больших деформаций и разворотов монокристаллов –
в локальной системе координат, связанной с монокристаллом), нетрудно видеть, что соотношения (2.9) (или (2.10)) представляют собой совокупность К линейных уравнений относительно компонент девиатора
напряжений s. Следовательно, в пространстве напряжений соотношения
(2.9) (или (2.10)) определяют К гиперплоскостей, или К-гранник, называемый многогранником текучести. Например, для ГЦК-кристаллов поверхность текучести представляет собой 24-гранник. В работах [48]
подтверждены известные данные [118, 119] о том, что в вершинах критерий Шмида одновременно выполняется или для 6, или для 8 СС;
результаты согласуются также с полученными ранее в рамках модели
Линя [41].
Как отмечено выше, соотношение (2.10) в физической теории пластичности часто используется в качестве критерия текучести не только для
определения момента начала текучести, но и для произвольного момента
деформирования. В этом случае τ (ck ) зависит от истории деформирования.
При одиночном скольжении по k-й активной системе скольжения происходит обычно увеличение критического напряжения τ (ck ) активной системы, называемое деформационным («активным») упрочнением и зависящее от величины сдвига. А что будет происходить в других СС, даже если
они не являются в данный момент активными? Из физических соображений нетрудно предположить, что изменение плотности дислокаций
в активных СС, сопровождающее пластическую деформацию, неминуемо повлияет на поведение дислокаций в других СС. Действительно,
наряду с активным упрочнением в экспериментах наблюдается увели59
чение критических напряжений в других системах, где сдвиг в процессе одиночного скольжения отсутствует; такое увеличение τ (cl ) , l ≠ k
называется скрытым («латентным») упрочнением. Последнее обусловлено увеличением плотности дислокаций в активных системах скольжения, являющихся препятствиями (дислокациями леса) для дислокаций других систем скольжения, равно как и возникновением других
барьеров дислокационного происхождения.
Как показывают эксперименты, при множественном скольжении
увеличение критического напряжения сдвига на единицу сдвига оказывается большим, чем при одиночном скольжении. Каким образом это
можно ввести в физическую модель? Тейлором был предложен закон
изотропного упрочнения, согласно которому приращения критических
касательных напряжений во всех активных системах скольжения одинаковы и определяются суммарным сдвигом по всем активным системам.
Указанный закон широко используется в различных модификациях физической теории пластичности. Кроме того, во многих работах принимается, что деформационное и скрытое упрочнения одинаковы; в настоящей работе данное предположение также будет частично использоваться. В то же время следует отметить, что экспериментальные
исследования свидетельствуют о некотором превышении латентного
упрочнения над деформационным.
Нетрудно видеть, что градиент поверхности текучести в пространстве напряжений определяется соотношением:
∂f (s)
= m ((S)k ) , k = 1, K .
∂s
(2.11)
Если изображающая точка в пространстве напряжений (ИТН) находится на одной из граней многогранника текучести (т.е. выполняются
условия пластического деформирования), для определенности – на грани с номером l, то активной является система скольжения l, и направление приращения пластической деформации определяется градиентом
к поверхности текучести. Иначе говоря, в данном случае выполняется
принцип градиентальности для поверхности текучести, т.е. справедлив
ассоциированный закон пластического течения. При расположении
ИТН на ребре многогранника текучести приращение девиатора пластической деформации dep имеет направление, определяемое линейной
комбинацией нормалей к пересекающимся граням. Аналогичным обра60
зом определяется направление dep при нахождении ИТН в вершине
многогранника (направление dep лежит внутри конуса, ограниченного
нормалями к пересекающимся граням).
2.5. МЕХАНИЗМЫ И МОДЕЛИ ДЕФОРМАЦИОННОГО УПРОЧНЕНИЯ
Изменение физико-механических свойств образца в процессах обработки металлов является следствием существенной перестройки микро- и мезоструктуры материала [66]. Описывать такие процессы невозможно без изучения и создания соответствующих моделей, в явном виде учитывающих физические первопричины эволюции микроструктуры
материала при больших деформациях. Непосредственно в структуру
физических теорий пластичности описание эволюции микроструктуры
вводят через специфические соотношения (как правило, мезо- или микроуровня), определяющие изменение критических сдвиговых напряжений на системах скольжения в зависимости от некоторого набора параметров (в качестве которых могут выступать сдвиги, температура, энергия дефекта упаковки и т.д.). Известно, что даже небольшое изменение
значений входящих в закон упрочнения материальных параметров может качественно отразиться на результатах описания поведения материала, в определяющие соотношения которого входят эти законы упрочнения, что свидетельствует о необходимости очень тонкого и корректного учета механизмов неупругого деформирования материала,
наиболее важных для исследования того или иного процесса.
В большинстве работ в рамках математических теорий пластичности, посвященных исследованию упрочнения, классификацию моделей
последнего проводят, исходя из качественного анализа вида «кривой
напряжение – деформация» (получаемой в макроопытах) при продолжающемся активном нагружении и рассмотрения экспериментальных
данных, полученных при исследовании микроструктуры материала при
той или иной интенсивности деформаций [56, 64 и др.]. Так, в упрочнении часто выделяют стадии, наступающие последовательно при пластической деформации образца: стадия легкого скольжения, имеющая место непосредственно после достижения предела текучести материал;
стадия линейного упрочнения, связанная, по-видимому, с пересечением
дислокационных линий и формированием дислокационных структур;
стадия параболического упрочнения, наблюдаемая у материалов с низкой энергией дефекта упаковки (ЭДУ) – связанная с взаимодействием
61
уже не отдельных дислокаций, а образовавшихся на ранних стадиях
дислокационных субструктур, а также образованием и разрушением сидячих дислокаций [81]. Подобное рассмотрение, как представляется, едва ли
можно использовать при построении физически обоснованной теории пластичности, так как, по сути, такая классификация представляет собой попытку описать упрочнение, основываясь только на макрофеноменологическом подходе, не раскрывая при этом физических первопричин упрочнения и не опираясь на физику взаимодействия носителей механизмов
пластической деформации – дислокаций и дислокационных субструктур.
Вышеизложенное объясняет то значительное внимание в физических теориях (как упругопластических, так и вязкопластических), которое уделяется модификации законов упрочнения, в частности, в связи с новыми экспериментальными данными, полученными с применением высокоразрешающей аппаратуры (в особенности – электронных
микроскопов).
В большинстве современных исследований по упрочнению авторы
используют так называемые дислокационно-ориентированные модели
(dislocation based models), в которых в качестве внутренних переменных
микроуровня вводят скалярные плотности дислокаций на системах
скольжения; далее записывают эволюционные уравнения для плотности
дислокаций, а в качестве замыкающих уравнений записывают выражение, связывающее скорости сдвигов со скоростями изменения плотности
дислокаций (обычно используется соотношение Орована) [91, 95–97, 99,
138, 162]. В качестве примера можно привести работу [97], в которой
развивается такой подход. В части, касающейся описания упрочнения,
авторы придерживаются классического подхода, когда скорость изменения критических касательных напряжений на системе скольжения записывается в виде
N slip
τ (cg ) = ∑ H gh γ ( h ) ,
(2.12)
h =1
где τ (cg ) – критическое напряжение сдвига на системе скольжения g,
точка сверху означает материальную производную по времени, γ ( h ) –
скорость сдвига по системе скольжения h, N slip – количество активных
систем скольжения, а коэффициенты (модули) упрочнения H gh описывают взаимодействие дислокаций различных систем скольжения. Заме62
тим, что критическое напряжение «привязано» к кристаллографической
СС, т.е. определяется с позиций наблюдателя, движущегося вместе
с КСК; выражаясь иначе, материальная производная является одновременно коротационной, что должно учитываться при записи закона
Шмида в скоростной форме.
Для дислокаций принимается гипотеза, что их плотность определяется тремя процессами: возникновением, скольжением и аннигиляцией дислокаций при достижении достаточно большой плотности и продолжающейся пластической деформации. Эти механизмы учитываются
в соотношении
1 1
ρ ( g ) = g − 2 yc ρ ( g ) γ ( g ) ,
b L
(2.13)
где ρ ( g ) – плотность дислокаций в g-й системе, b – модуль вектора Бюргерса, yc – расстояние аннигиляции для дислокационного диполя, Lg –
длина свободного пробега дислокаций, определяемая, в свою очередь,
соотношением
g0
Lg =
∑
ρ(h )
(2.14)
,
h =1, h ≠ g
где g 0 – параметр, определяемый дислокационной структурой. Автор
использует в качестве закона упрочнения соотношение [95]
τ
(g)
c
= τ 0 + αGb
N slip
∑a
ρ ,
gh ( h )
(2.15)
h =1
где τ 0 – начальное критическое напряжение сдвига, α– параметр, связанный со стабильностью дислокационной структуры, G – модуль сдвига. Модули упрочнения H gh тогда связаны с коэффициентами взаимодействия систем скольжения a gh соотношением:
αG
H gh =
N slip
2
∑a
ρ
gh ( h )
1
a gh g − 2 yc ρ ( g ) .
L
(2.16)
h =1
63
Попытка явного учета различных конкретных механизмов взаимодействия дислокаций в законе упрочнения делается в работе [162].
К существенным недостаткам предлагаемой модели следует отнести тот
факт, что модули упрочнения в работе есть величины постоянные,
а способ их определения не описан. Перечислим некоторые учитываемые в работе механизмы: формирование барьеров Ломера–Коттрелла,
образование барьеров Хирта и так называемых «скользящих стыков»,
взаимодействие дислокаций на скрещивающихся системах скольжения,
взаимодействие дислокаций, лежащих в одной плоскости, в том числе
взаимодействие дислокаций одной и той же системы. Для описания эволюции скалярной плотности дислокаций принимаются соотношения вида (2.13), без учета размера зерна.
В статье [159] детально анализируются законы кинематического
внутризеренного упрочнения (или – законы, определяющие эволюцию
остаточных микронапряжений ρ). Каждое зерно представляется совокупностью внутренностей и стенок ячеек, материал внутри ячейки полагается упругопластическим, стенки рассматриваются состоящими из
упругого материала. Для получения аналитического решения рассматривается простая геометрия ячеек (сферическая и круговая цилиндрическая). Определение остаточных микронапряжений осуществлено с помощью моделей Kröner и Berveiller & Zaoui в предположении изотропии
кристаллов. Согласно модели Kröner тензор остаточных микронапряжений ρk в k-й ячейке определяется как
ρ k = –2G (1 – β)(ε pk – ε p ) ,
где β – геометрический фактор (для сферического включения решение
Эшелби дает β = 2 (4–5ν) /15 (1–ν), ν – коэффициент Пуассона), ε pk –
пластическая составляющая тензора деформаций внутри k-й ячейки, ε p –
средняя по кристаллу пластическая деформация. Berveiller & Zaoui
предложили уточненное соотношение:
ρ k = –2G (1 – β)
1
εp
1+ 3 G u
2 σ
u
(ε pk – ε p ) ,
где ε u , σu – интенсивности пластических деформаций и напряжений.
p
С учетом предположения о деформировании стенок ячеек упругим образом последнее соотношение модифицировано к виду
64
ρk = –
fw
G (1 – β)
1 − fw
N
1
ε
1+ 3 G u
2 σ
p
∑ γ (n m
i =1
i
i
i
+ mini ) ,
u
где f w – объемная доля границ ячеек. Результаты расчетов сопоставлялись с данными экспериментальных исследований разных авторов, проведенных на растяжение и циклическое нагружение монокристаллов,
показано удовлетворительное соответствие экспериментальных и теоретических результатов, полученных с помощью модифицированной модели, тогда как результаты расчетов по модели Kröner на один-два порядка превышают экспериментально измеренные.
В работе [80] рассматривается модель пластичности кристаллов,
основанная на введении тензора плотности и/или скалярной плотности
дислокаций. Во втором случае предлагается использовать вязкопластический закон: при выполнении условия Шмида на некоторой системе
скольжения скорость сдвига в ней определяется соотношением:
γ(k ) =
τ ( k ) – ρ( k ) − τ (ck )
g
nk
sign(τ ( k ) – τ c( k ) ) ,
(k )
(2.17)
где τ( k ) – сдвиговое напряжение в системе скольжения k, τ ( k ) = m((S)k ) : σ ;
m ((S)k ) – симметричный ориентационный тензор, τ (ck ) , ρ ( k ) – параметры изотропного и кинематического упрочнения, зависящие от плотности дислокаций; g (k), nk – материальные константы, X = Max (0, X) . Подробно
закон упрочнения рассмотрен в [87] и имеет вид:
(
)
r)
τ (ck ) = τ (0k ) + ∑ Q k hkr 1 – e –br γcum , γ (cum
= ∫ γ ( r ) dt ,
r
(r)
ρ( k ) = c k α k , α k = γ ( k ) – d k α k γ( k )
ρ( k )
– k
N
t
0
(2.18)
mk
sign ( α k ) ,
(2.19)
где матрица Qk hkr определяет активное и латентное упрочнение (неизотропный закон упрочнения), br, dk, mk, Nk – материальные константы.
65
Модификация упруговязкопластической модели, основанная на
прямом рассмотрении движения краевых и винтовых дислокаций, предложена в работе [61]. Скорость сдвига в каждой СС определяется плотностями соответствующих типов дислокаций и средними скоростями их
движения (т.е. по уравнению Орована). Предложены эволюционные
уравнения для плотности дислокаций, учитывающие их генерацию (источниками Франка–Рида) и аннигиляцию. Критические напряжения
сдвига в СС определяются отдельно для краевых и винтовых дислокаций по плотности дислокаций обоих типов, накопленных в других СС,
и законам взаимодействия с ними (с учетом образования барьеров дислокационного типа). Ротации решеток зерен устанавливаются ортогональным тензором, входящим в полярное разложение упругой составляющей градиента места. Подробно описана численная процедура реализации модели. Вышеописанная физическая модель была встроена
в конечно-элементный пакет ABAQUS. Для идентификации использованы экспериментальные данные по растяжению монокристалла алюминия. Представлены результаты расчета прямых полюсных фигур при
стесненной осадке (в условиях ПДС) образцов из поликристаллического
алюминия.
Следует отметить, что применение в качестве внутренних переменных скалярных плотностей дислокаций на системах скольжения
влечет за собой большие сложности при использовании модели. Вопервых, использование переменных микроуровня сразу лишает исследователя возможности оперировать достоверными экспериментальными
данными, дающими представление о реальных процессах, протекающих
на данном масштабном уровне при пластической деформации; вовторых, даже опираясь на теорию дислокаций, едва ли можно учесть
в уравнениях вида (2.13) взаимодействие дислокаций различных систем
скольжения; наконец, в-третьих, даже в упомянутой достаточно простой
модели введено множество материальных констант микроуровня, определять значения которых возможно только из экспериментов. В силу
того, что состояние современной экспериментальной базы не позволяет
в динамике отслеживать эволюцию дислокационных субструктур в объеме деформируемого материала, дислокационно-ориентированный подход к описанию упрочнения представляется интересным и перспективным, но еще недостаточно инструментально оснащенным.
В работах [43, 44, 49, 173] предлагается подход к описанию упрочнения в моно- и поликристаллах, основанный на физическом анали66
зе механизмов взаимодействия дислокаций друг с другом и с границами
зерен; при этом в соотношения явным образом не вводятся плотности
дислокаций, законы упрочнения записаны в терминах сдвигов. Дается
краткий обзор существующих в отечественной и иностранной литературе теорий упрочнения. Отмечается, что существуют два основных варианта построения таких соотношений: первый – без явного учета эволюции дефектной структуры материала, второй – на основе подхода к построению определяющих соотношений с использованием внутренних
переменных, характеризующих микроструктуру материала; при этом,
как правило, необходимо использовать переменные микроуровня –
плотности дислокаций, что приводит к проблеме замыкания эволюционных уравнений.
Рассматриваются некоторые физические механизмы упрочнения,
предлагается разделение упрочнения на неориентированное и ориентированное. Первое описывает упрочнение независимо от направления
деформирования (образование пересечений дислокаций, жгутов, кос,
барьеров Ломера–Коттрелла); такое упрочнение приводит к увеличению
критического напряжения сдвига сразу на многих СС. Второе связано
с накоплением упругой энергии на «поджатых дислокациях» (на различных барьерах), эта энергия может высвобождаться при «развороте»
направления деформирования. Запасаемая на микродефектах энергия,
в свою очередь, разделяется на два типа: невысвобождаемая на микрои мезодеформациях и высвобождаемая; доля «высвобождаемости» зависит от сложности нагружения. Это разделение учитывается, например,
при модификации основного (степенного) составляющего закона упрочнения и при описании эффекта Баушингера.
Полагается, что основной вклад в упрочнение каждой СС вносит
взаимодействие собственными полями напряжений дислокаций рассматриваемой СС друг с другом и лесовыми дислокациями, для описания которого принимается степенной закон вида
τ c( kb)
ψ −1
24
γ (i )
( k ) (i )
(i )
(k )
(i )
γ ,
= f ( γ , γ ) = ψE ∑ ai 24
( j)
i =1
∑ γ
j =1
(2.20)
67
k = 1, 24, ψ > 1, γ (i ) ≥ 0,
τ c( k ) ( 0 ) = τ (ck0) ,
модифицированный (сомножителем в квадратной скобке) с целью учета
сложности предшествующего нагружения. Введение указанного сомножителя позволяет описать наблюдаемое для большинства металлов
и сплавов свойство насыщения упрочнения, имеющее место на стадии
множественного скольжения; заметим, что при одиночном скольжении
данный сомножитель равен 1.
В предположении об аддитивности скоростей критических напряжений сдвига на системе скольжения, обусловленных различными механизмами упрочнения, степенной закон (2.20) дополняется слагаемыми, учитывающими основные механизмы возникновения препятствий
при пластическом деформировании, не учтенными первым (степенным)
слагаемым, так что общая скорость изменения критического напряжения на k-й СС определяется соотношением:
(
)
( k ) (i )
τ (сk ) = f ( k ) ( γ (i ) , γ (i ) ) + f ЛК
γ , γ (i ) ;α1(i ) , α(2i ) ,… , α(ni ) +
(
)
(
)
(k )
γ (i ) , γ (i ) ;δ1(i ) , δ(2i ) ,… , δ(pi ) ,
+ f ан( k ) γ (i ) , γ (i ) ;β1(i ) ,β(2i ) ,… ,β(mi ) + f ЗГУ
(2.21)
i, k = 1, 24,
где α1( ) , α (2 ) ,… , α (n ) ; β1(i ) ,β (2i ) ,… ,β (mi ) и δ1(i ) , δ(2i ) ,… , δ(pi ) – наборы внутренних
переменных, характеризующих соответствующие механизмы (вообще
говоря, принимающие различные значения в каждый момент деформирования для разных систем скольжения) [49]. Здесь слагаемое
i
i
i
( k ) (i )
f ЛК
γ , γ (i ) ;α1( ) , α(2 ) ,… , α(n ) описывает дополнительное упрочнение за
i
(
i
i
)
счет реакций на расщепленных дислокациях (в данной работе – на примере
k
i
i
i
образования барьеров Ломера–Коттрелла), f ан( ) γ (i ) , γ (i ) ;β1( ) ,β(2 ) ,… ,β(m)
(
)
позволяет учесть уменьшение критических напряжений при реверсивном
скольжении
за
счет
аннигиляции
дислокаций,
(k )
(i ) (i )
(i )
(i )
(i )
f ЗГУ γ , γ ;δ1 , δ 2 ,… , δ p
описывает дополнительное упрочнение,
(
)
возникающее при взаимодействии внутризеренных дислокаций с границами зерен.
68
Подход к описанию неориентированного упрочнения проиллюстрируем на примере описания дополнительного упрочнения за счет образования барьеров Ломера–Коттрелла. Вводя дополнительные внутрен(i )
можно записать в виде:
ние переменные, функцию упрочнения f ЛК
γ
(i )
f ЛК
( γЭДУ , γ (i ) , γ ( j ) ) = ξ1τ(ci) 1 − γ *ЭДУ
ЭДУ
−1
t (i )
N*
i
dτ + f 0( ) γ (i ) ∑ γ ( j ) + γ b0 ,
× ∫ f ЛК
j ≠i
0
γ ЭДУ
H 1 −
γ *ЭДУ
×
(2.22)
где γ*ЭДУ – критическое значение энергии дефекта упаковки (ЭДУ), при
превышении которой дислокации теряют способность к расщеплению;
γ ЭДУ – ЭДУ конкретного материала; N * – число СС, сопряженных
к данной (т.е. систем, расщепленные дислокации которых способны
вступать в реакции с дислокациями рассматриваемой СС с образованием барьеров Ломера–Коттрелла, см. п. 2.2); τ(ci ) – текущее критическое
напряжение; γ b0 – малая константа; ξ1 – материальная константа; Н –
функция Хэвисайда.
Ориентированное упрочнение рассмотрим на примере двух механизмов: за счет аннигиляции дислокаций, «поджатых» на препятствиях,
при смене направления деформирования, и за счет взаимодействия
внутризеренных дислокаций с границами зерен в случае деформирования поликристалла. Из анализа процесса аннигиляции определяются основные факторы, влияющие на уменьшение критического касательного
напряжения на данной СС (в терминах сдвигов и скоростей сдвигов по
СС). Полагаем, что плотность дислокаций, поджатых к барьерам различной природы на каждой СС, пропорциональна накопленному сдвигу,
скорость аннигиляции дислокаций на i-й СС – произведению скорости
сдвига по этой СС и величины накопленного сдвига на «противоположенной» СС (для ГЦК-кристаллов – с номером (i+12), индекс изменяется
по модулю 24). Аннигиляция дислокаций рассматриваемой СС затрудняется дислокациями, накопленными на других СС, в случае предшествующего множественного скольжения. Для учета этого обстоятельства в соотношение для f ан( i ) введем дополнительный множитель, учитывающий
69
сложность нагружения по каждой СС, определяемый как отношение
сдвига на рассматриваемой СС к суммарному сдвигу по всем СС; по сути, этот множитель определяет долю упругой энергии (поля напряжений дислокаций), высвобождаемой при реверсивном нагружении.
В итоге рассматриваемый член в законе упрочнения представляется возможным определить следующим соотношением:
f ан( i ) ( β1 ,β 2 ,… ,β m ) =
dτ (анi )
= −ξ 2 τ (анi )
dt
γ ( ) ( i ) ( i +12)
+ γ 0a ) ,
γ (γ
( j)
∑γ
i
j
τ (ан)
i
где
∑ γ( )
j
t =0
(2.23)
= τ (ci0) , i = 1, 24,
– суммарный накопленный сдвиг по всем СС кристаллита,
j
γ 0a – малый параметр, ξ 2 – материальная константа.
При описании зернограничного упрочнения принимается один из
физически возможных механизмов взаимодействия дислокации с границей кристаллита: прохождение краевой решеточной дислокации через
плоский участок (фасетку) границы соседних кристаллитов, определяемый нормалью Nk, в наиболее благоприятно ориентированную систему
скольжения соседнего кристаллита. Последняя определяется из условия
минимальности скорости приращения внутренней энергии соседних
кристаллитов в текущий момент деформирования [18]. Для вычисления
последней введем декартов ортогональный базис: первый базисный вектор определяется внешней нормалью фасетки границы, N = Nk, второй L
направим вдоль линии пересечения плоскости фасетки границы Nk и j-й
плоскости скольжения дислокации рассматриваемого i-го кристаллита
nj. Третий вектор B расположен вдоль линии пересечения плоскости
границы и плоскости, построенной на векторах N и nj: B = N × L . Базисная тройка векторов (B, N, L) является правой, и векторы L и B лежат
в плоскости границы. В указанном базисе устанавливается геометрический смысл компонент тензора пластической составляющей градиента
скорости перемещения j-й СС рассматриваемого i-го кристаллита
l in( j ) , l-й СС соседнего m-го кристаллита l in(l ) и тензора разности
pq
pq
пластических составляющих градиентов скоростей перемещения сосед-
70
них кристаллитов ∆l in( j ,l ) = l in( j ) − l in(l ) . С использованием укаpq
pq
pq
занного критерия определяется мера взаимной разориентации СС соседних кристаллитов, которая для текущего i-го кристаллита данной j-й
СС, взаимодействующей с m-м кристаллитом через k-ю фасетку границы, устанавливается соотношением:
{
}
ξ ((ij,,mk )) = α ( j ) min ξ ((ij,,mk ),l ) , l = 1, K =
l
= α ( j ) min{ ∆l in( j ,l )
l
BB
+ ∆l in( j ,l ) + ∆l in( j ,l ) + ∆l in( j ,l ) +
BN
BL
NB
(2.24)
+ ∆l in( j ,l ) + ∆l in( j ,l ) + ∆l in( j ,l ) + ∆l in( j ,l ) + ∆l in( j ,l ) },
NN
NL
LB
LN
LL
где α ( j ) – нормирующий множитель, определяемый из условия «непроницаемости» фасетки («жесткая стенка»):
α ( j ) = { l in( j ) + l in( j ) + l in( j ) + l in( j ) +
BB
BN
BL
NB
+ l in( j ) + l in( j ) + l in( j ) + l in( j ) + l in( j ) }−1.
NN
NL
LB
LN
LL
(2.25)
Результатом акта прохождения дислокации через границу в силу различной ориентации кристаллитов является появление в фасетке дислокации ориентационного несоответствия (ДОН). Поле упругих напряжений
ДОН препятствует дальнейшему скольжению решеточных дислокаций.
Для качественной оценки этих напряжений можно рассматривать ДОН
в изотропной упругой среде, относя ее к текущему кристаллиту. Касательные напряжения τbs , препятствующие движению краевых дислокаций,
( j)
получаются осреднением поля напряжения ДОН по j-й СС [18]. С использованием полученной оценки дополнительное зернограничное упрочнение
предлагается описывать при помощи соотношения:
Kf
Sk
k =1 S
( j)
= η∑
f ЗГУ
Ks
∑ξ
s =1
( s ,k )
(i ,m )
(s)
γ ( ) τbs
,
s
(2.26)
где Sk – площадь k-й фасетки кристаллита, S – площадь границы кристаллита, Kf – количество фасеток границы, Ks – количество СС рассматриваемого кристаллита, дислокации которых движутся в направле71
(s)
нии k-й фасетки границы, τbs
– касательные барьерные напряжения,
обусловленные ДОН, γ ( s ) – скорость сдвига по s-й СС, η – безразмерный
параметр, определяемый в ходе процедуры идентификации.
В цитируемых выше работах представлены результаты расчетов
в серии численных экспериментов по моделированию деформирования
моно- и поликристаллов с учетом различных дополнительных слагаемых в законе упрочнения. Удовлетворительно описано начало второй
стадии упрочнения, связанное с введением в законы упрочнения слагаемого, описывающего дополнительное упрочнение за счет реакций на
расщепленных дислокациях и образования барьеров Ломера–Коттрелла.
Представлены результаты по реверсивному деформированию с учетом
слагаемого, описывающего аннигиляцию дислокаций. Для модельного
материала (чистая медь) показано, что при смене направления деформирования (с одноосного растяжения на одноосное сжатие) предел текучести материала снизился с ∼33 до ∼30 МПа.
Проведены численные эксперименты по описанию циклического
деформирования: представительный объем поликристалла подвергали
кинематическому нагружению (растяжение-сжатие) при различном числе
циклов нагружения. С увеличением количества циклов отчетливо проявляется эффект Баушингера, наблюдается явление «размывания» второй
стадии упрочнения по всему участку пластического течения. Исследование изменения дефектной структуры материала при большом числе циклов показывает постепенный выход всех СС на одинаковую плотность
барьеров Ломера–Коттрелла. Приведена диаграмма одноосного сжатия
поликристалла при учете слагаемого, описывающего зернограничное упрочнение. Заметен переход с некоторого момента деформирования от линейного упрочнения к нелинейному участку; нелинейность обусловлена
совместным влиянием на скорость дополнительного упрочнения как скорости сдвига по данной СС, так и накопленного сдвига по этой же СС
(в отличие от других дополнительных слагаемых).
ВОПРОСЫ К ГЛАВЕ 2
1. Какие механизмы неупругого деформирования вы знаете?
2. Получите оценку теоретической прочности согласно модели
Я.И. Френкеля. Приведите соотношение Пайерлса–Набарро для значения критического напряжения сдвига.
72
3. Приведите часто используемые способы модельного введения
в кристаллы краевых и винтовых дислокаций.
4. Дайте определения полных и частичных дислокаций (в том числе –
Шокли и Франка), дефекта упаковки, расщепленной дислокации.
5. Каким правилам должны удовлетворять реагирующие дислокации?
6. Приведите построение стандартного тетраэдра Томпсона и правила его применения для анализа дислокационных реакций.
7. С использованием тетраэдра Томпсона объясните образование
барьеров Ломера–Коттрелла.
8. Посредством чего дислокации взаимодействуют друг с другом
и с точечными дефектами, каков качественный характер этих взаимодействий? Как можно описать поведение дислокации вблизи свободной
поверхности кристалла?
9. К чему приводит пересечение дислокаций, залегающих в перпендикулярных плоскостях: а) с перпендикулярными и б) с параллельными векторами Бюргерса?
10. Опишите кристаллогеометрию и механизмы двойникования,
влияние двойников на другие механизмы деформирования.
11. Какие параметры воздействий и за счет каких механизмов оказывают влияние на процесс двойникования?
12. Запишите закон Шмида. Каким образом можно учесть эффект
Баушингера для кристаллитов?
13. Дайте определение и физическое объяснение активного (деформационного) и скрытого (латентного) упрочнения. Сформулируйте
закон упрочнения Тейлора.
14. Какие физические механизмы и взаимодействия учитываются при
записи законов упрочнения в дислокационно-ориентированных моделях?
15. Каким образом в законе упрочнения может быть учтено свойство насыщения упрочнения на стадии множественного скольжения?
16. Дайте определение ориентированного и неориентированного
упрочнения; опишите влияние каждого из этих видов на изменение критических напряжений.
17. Каким образом в законе упрочнения учитывается образование
дислокационных барьеров, аннигиляция дислокаций и взаимодействие
дислокаций с границами зерен? Проведите физический анализ соответствующих членов закона упрочнения.
73
ГЛАВА 3. КИНЕМАТИКА НЕУПРУГОГО ДЕФОРМИРОВАНИЯ
3.1. УРАВНЕНИЕ ОРОВАНА
Рассмотрим монокристалл, ориентированный на одиночное
скольжение краевых дислокаций в направлении оси x1 в плоскости x1Ox3
(единичная нормаль n ориентирована вдоль оси Ox2). Размеры кристалла вдоль осей x1, x2 и x3 обозначим соответственно через a1, a2 и a3.
Тогда прохождение одиночной дислокации с вектором Бюргерса b приводит к сдвигу одной части кристалла относительно другой (в направлении оси х1), величина которого может быть приближенно (в среднем)
оценена сдвиговой деформацией:
b b
γ = arctg ≈ .
a2 a2
Если дислокация «прошла» лишь некоторую часть ∆a1 кристалла
вдоль оси x1, то можно принять, что сдвиг составляет часть ∆a1/a1 от
введенного выше. Тогда, вводя среднюю длину свободного пробега
дислокаций λ и полагая, что подвижными являются n дислокаций данной системы скольжения, величину сдвига можно определить следующим соотношением:
γ = bρλ ,
(3.1)
где ρ – плотность подвижных дислокаций (в данном случае
ρ = na3/(a1a2a3) = n/(a1a2)). Соотношение (3.1) может быть записано
для любой k-й системы скольжения:
γ(k) = b(k)ρ(k)λ(k) , Σ .
k
(3.2)
Как известно, плотность дислокаций в металлах меняется в широких
пределах – от 105–108 см–2 в отожженных кристаллах до 1012–1014 см–2
в сильно деформированных. Существуют специальные способы термообработки, позволяющие снизить плотность дислокаций до 103 см–2.
Принимая плотность дислокаций постоянной и дифференцируя
соотношение (3.2), можно для каждой системы скольжения получить
выражение для скорости сдвига (уравнение Орована):
γ = bρv ,
74
(3.3)
где v – средняя скорость движения дислокаций. Следует заметить, что
более корректным представляется использование в качестве исходного
именно соотношение (3.7), где ρ – плотность подвижных дислокаций
в текущий момент деформирования. В этом случае нет необходимости
в гипотезе о неизменности плотности подвижных дислокаций. Кроме
того, при таком ходе рассуждений точно выполняется аддитивность
скоростей сдвигов по различным системам скольжения, принятая ниже.
Суммируя скорости сдвига по всем системам скольжения рассматриваемого кристалла, для монокристалла, деформируемого только путем
скольжения краевых дислокаций, можно следующим образом определить девиатор тензора деформации скорости:
N
d p = ∑ m ((S)k ) γ ( ) .
k
(3.4)
k =1
Следует заметить, что использование соотношения Орована для
скоростей сдвига вида (3.3) в физических теориях пластичности влечет
за собой введение новых параметров модели, связанных с появлением
неявных внутренних переменных – плотности подвижных дислокаций,
и необходимость формулировки эволюционных соотношений для этих
переменных. Данное обстоятельство затрудняет использование уравнения Орована в физических моделях.
3.2. МОДЫ НЕУПРУГОГО ДЕФОРМИРОВАНИЯ МОНОКРИСТАЛЛОВ
Скольжение
Основным механизмом неупругого деформирования монокристаллов в физических теориях пластичности считается движение
краевых дислокаций. Конечно, наряду с краевыми дислокациями
в реальных моно- и поликристаллических телах наличествуют и винтовые дислокации, и множество других дефектов. То, что именно
движущиеся дислокации являются основным источником появления
необратимых деформаций, – это факт, подтвержденный огромным
количеством экспериментов. Включение в рассмотрение только краевых дислокаций обусловлено отчасти сложившейся в ФТП традицией; кроме того, как известно [27], винтовые дислокации имеют
бόльшую энергию активации и меньшую плотность по сравнению
с краевыми дислокациями.
В кристаллических телах плоскости залегания и ориентация векторов Бюргерса, вдоль которых осуществляется трансляционное движение (скольжение) краевых дислокаций, известны; ими являются наиболее плотно упакованные плоскости и направления. Так, в ГЦК-металлах
75
скольжение краевых дислокаций осуществляется в плоскостях системы
{111} по направлениям <110>, соединяющим ближайшие в плоскости
наиплотнейшей упаковки атомы (иначе говоря, в системе скольжения
{111}, <110>), итого – 12 систем скольжения (СС). При повышенных
температурах в некоторых ГЦК-кристаллах (например, в алюминии) наблюдается скольжение по трем плоскостям системы {100} по двум направлениям <110>. В ОЦК-решетке трансляционное движение краевых
дислокаций осуществляется в плоскостях {110}, {112} или {123} по направлениям <111>; каждому из 4 направлений <111> соответствуют по
3 плоскости скольжения из систем плоскостей {110}, {112} и 6 плоскостей скольжения из системы {123}, так что полное число СС достигает
48 (рис. 3.1–3.4). В ГПУ-металлах скольжение имеет место по базисным
плоскостям {0001} в направлении 1 1 2 0 , плоскости 1 1 2 2 по
{
}
направлению 1 1 2 3 ; возможно также скольжение в так называемых
Рис. 3.1. Система плоскостей скольжения {110}
и соответствующие им направления <111> (ОЦК-решетка)
76
{
}
призматических плоскостях 1 0 1 0 (рис. 3.5). Обозначив через а длину ребра кубической решетки, нетрудно установить, что векторы Бюргерса в ГЦК-решетке суть векторы а/2<110> (модуль вектора Бюргерса
a 2 ), в ОЦК – а/2 <111> (модуль – a 3 2 ), в ГПУ – a 1120 (модуль – а; для ГПУ а – длина стороны правильного шестиугольника в базисной плоскости). Полный перечень систем скольжения для ГПУ-кристаллов приведен в табл. 3.1, в которую включены также системы двойникования (СД).
Рис. 3.2. Система плоскостей скольжения {112}
и соответствующие им направления <111> (ОЦК-решетка)
77
Рис. 3.3. Система плоскостей скольжения {123}
и соответствующие им направления <111> (ОЦК-решетка)
Напомним, что условием активации k-й СС является достижение касательного напряжения в ней некоторого критического напряжения τ (ck ) :
b ( k )n ( k ) : σ = τ c( k ) ,
(k )
где n b
(k )
( ∑ k)
(3.5)
( Σ ) – ориентационный тензор k-й системы скольжения;
k
чаще в литературе в качестве ориентационного тензора m ((S)k ) k-й системы используется симметричная часть диадного произведения:
m ((S)k ) =
1 (k ) (k )
(n b + b ( k ) n ( k ) ), ( Σ ) .
k
2
Нетрудно видеть, что ориентационный тензор является девиатором.
78
Рис. 3.4. Система плоскостей скольжения {123}
и соответствующие им направления <111> (ОЦК-решетка)
Рис. 3.5. Кристаллографические плоскости в ГПУ-структуре [56]:
GHIJKL – базисная плоскость (0001) , ABHG – призматическая плоскость (1010 ),
GHM – пирамидальная плоскость (1011) , GHN – пирамидальная плоскость
(1012 ), GIM – пирамидальная плоскость (1 121), GIN – пирамидальная
плоскость (1 12 2 )
79
Таблица 3.1
Системы скольжения (СС) и двойникования (СД) ГПУ-кристаллов
Механизм деформации
Плоскость
Направление
Количество
систем
( 0001)
1120
3
1120
3
1123
12
1123
6
1011
6
Базисное скольжение < a >
(1010 )
(1011)
(1122 )
(1012 )
Призматическое скольжение < a >
Пирамидальное скольжение < a + c >
Двойники сжатия
Двойники растяжения
(k ) (k )
( Σ ) на симметризоСледует отметить, что замена диады n b
k
ванный ориентационный тензор m
(k )
(S)
не имеет корректного физического
обоснования. Действительно, такая замена означает, что при активиза(k ) (k )
( Σ ) активируции реально существующей в кристалле k-й СС n b
k
(k )
(k )
ется также другая СС с нормалью b и направлением скольжения n ,
которая в реальном кристалле может отсутствовать, в чем нетрудно
убедиться, например, для ГЦК-кристаллов. Тем не менее в известных
авторам работах симметризация используется всегда. Как представляется, данное обстоятельство связано с трудностями применения несимметричных мер деформированного и напряженного состояния, прежде
всего – с отсутствием экспериментальных данных о (несимметричных)
компонентах тензора упругих характеристик. Заметим, что в некоторых
работах указанная симметризация осуществляется неявным образом,
т.е. в законе Шмида и выражении неупругой составляющей тензора деформации скорости применяется несимметричный ориентационный
тензор, но затем используется симметричный (по индексам первой
и второй пар) тензор упругих характеристик п в законе Гука.
Условие (3.5), как отмечено выше, обычно называется законом
Шмида, устанавливающим момент начала неупругого деформирования
при достижении в системе скольжения критического значения касательного напряжения. При реализации (3.5) в одной системе скольже-
80
ния говорят об одиночном скольжении; если кристалл подвергается нагружению, при котором дислокации начинают скользить в двух или более системах, то говорят о двойном или множественном скольжении.
При наличии K активных систем скольжения (т.е. СС, для которых
удовлетворяется закон Шмида (3.5)) в произвольный момент деформирования девиатор пластической составляющей тензора деформации
скорости определяется соотношением
K
d p = ∑ m ((S)k ) γ ( k ) ,
(3.6)
k =1
где γ ( k ) – скорость сдвига в k-й СС.
Переползание
Как было отмечено выше, краевые дислокации могут испытывать
локальные смещения в плоскости скольжения в направлении вектора
Бюргерса, такое движения называется скольжением (или консервативным движением) краевых дислокаций. Однако возможно смещение дислокации перпендикулярно вектору Бюргерса в соседнюю плоскость
скольжения. При таком движении необходимо устранить ряд атомов,
образующих край экстраплоскости. Это может произойти путем диффузии этих атомов в междоузлия или вакансий на эти места [56]. Такой
процесс получил название переползания (неконсервативного движения)
дислокаций, и его осуществление в значительной степени обусловлено
термической активацией.
Заметим, что в случае винтовой дислокации «лишней» полуплоскости атомов нет, поэтому она может свободно скользить по любой
плоскости, которая содержит линию дислокации и вектор Бюргерса.
В общем случае скольжения и переползания краевых и движения
винтовых дислокаций выражение для девиатора деформаций скорости
имеет вид [30]:
d p = −Є : N ,
(3.7)
где Є – тензор (третьего ранга) Леви–Чивита, N – тензор третьего ранга, определяемый соотношением
81
N = ∫ f v l b (d l) (d b) .
(3.8)
В последнем соотношении f (b, l, r) – функция распределения дислокаций в точке r по параметрам b и l, где l – единичный вектор, направленный вдоль линии дислокации (для винтовой дислокации совпадает с направлением вектора Бюргерса; для краевой дислокации векторы l, b, n составляют правую тройку), v – скорость движения
дислокации.
Двойникование
Другим механизмом неупругого деформирования является двойникование. Отметим, что двойникование может не вносить большого
вклада в неупругую деформацию, но играет весьма важную роль в процессе скольжения краевых дислокаций – основного механизма неупругого деформирования. Процесс двойникования будет рассматриваться
подобно скольжению краевых дислокаций. Используя две конфигурации кристаллита: отсчетную конфигурацию (монокристалл находится
в недеформированном состоянии, двойники отсутствуют) и актуальную
(в монокристалле появляются несколько двойниковых прослоек), можно показать, что осредненный (по кристаллиту) градиент места, описывающий формоизменение двойникованием, имеет следующий вид:
ftwin = f γ twbtwntw + E ,
(3.9)
где E – единичный тензор; btw – направление сдвига двойника; ntw –
нормаль к плоскости двойникования; f – безразмерная величина, равная
отношению объемов двойниковых прослоек, в которых произошел
сдвиг, к объему всего кристаллита (объемная доля двойников); γtw – величина постоянного сдвига двойника.
Полагая, что двойникование происходит непрерывно, f существует и конечно, осредненный градиент скорости перемещений двойникования для монокристалла в разгруженной конфигурации можно записать в виде [142]
in
in
in −1
l**
= f γtwbtwntw = f γtwt .
tw = ftw ⋅ ftw
82
(3.10)
Таким образом, двойникование может рассматриваться как «псевдоскольжение» со скоростью «двойникового» сдвига fγ tw и ориентационным тензором t = b twn tw . Для каждой k-й системы двойникования введем обозначение симметричного ориентационного тензора t(k) в актуальной конфигурации:
1
k
(k ) (k )
(k ) (k )
t ( ) = f e ( btw
ntw + ntw
btw ) f − e , k = 1,..,12.
2
(3.11)
Неупругую составляющую тензора деформации скорости, связанную с двойникованием, можно записать в виде, аналогичном (3.6):
N tw
d = ∑ f ( k ) γtwt ( ) .
in
tw
k
(3.12)
k
Условием активации k-й системы двойникования является достижение касательного напряжения в ней некоторого критического напряk)
жения τ (ctw
, условие записывается в виде, аналогичном закону Шмида
(3.1.1):
k)
.
t ( k ) : σ = τ (ctw
(3.13)
Приведенное соотношение позволяют включить двойникование
в физические теории пластичности наряду с деформированием скольжением дислокаций.
3.3. СТАТИСТИЧЕСКИ НАКОПЛЕННЫЕ И ГЕОМЕТРИЧЕСКИ
НЕОБХОДИМЫЕ ДИСЛОКАЦИИ, ИЗГИБЫ–КРУЧЕНИЯ РЕШЕТКИ
В пионерских работах по физическим теориям дислокации различных знаков полагались равномерно распределенными по разным СС
кристаллита; плотность дислокаций увеличивается с ростом неупругой
деформации, дислокации вступают во взаимодействие, начинают образовывать различные субструктуры; однако часть дислокаций и при значительных деформациях примерно однородно распределена по кристаллитам. Такие дислокации позднее стали называться «статистически накопленными дислокациями» (СНД). Однако при деформировании
дислокации могут накапливаться перед различными препятствиями,
83
в зависимости от процесса деформирования в различных областях кристаллитов могут превалировать дислокации того или иного знака («избыточные дислокации»). С позиций кинематики появление такого неоднородного распределения дислокаций разных знаков объясняется необходимостью сохранения сплошности материала при наличии градиентов
деформаций. Дислокации, образующие подобные неоднородные поля,
в современных физических теориях пластичности называются «геометрически необходимыми» (ГНД). Детальное рассмотрение теории геометрически необходимых дислокаций, определение тензора их плотности через f р и градиент f р в отсчетной конфигурации содержатся в [81].
В цитируемой работе отмечается, что наряду со «статистически накопленными дислокациями» (СНД) [66], являющимися следствием однородного пластического деформирования, вблизи областей неоднородности
пластических сдвигов (например, в окрестности границ зерен) появляются
дислокационные субструктуры типа стенок дислокаций, дислокационных
ячеек и т.д., которые должны обеспечить совместность деформации решетки и обеспечить искривления – кручения решетки, которые и называются «геометрически необходимыми дислокациями».
Понятно, что в случае возникновения неоднородностей пластической
деформации теории первого порядка не позволяют адекватно описать исследуемые процессы, в связи с чем в этих случаях требуется применение
моделей обобщенных континуумов. Например, предлагаемая в статье [90]
градиентная модель основана на указанной концепции «геометрически необходимых дислокаций». В соответствии с данной концепцией авторы
представляют поликристалл совокупностью двух «фаз» – примерно однородно деформируемых «ядра» зерен и бикристаллических зон, моделирующих участки границы каждого из зерен. В качестве основы для описания поведения «зон однородности» принята упруговязкопластическая модель [110], основанная на мультипликативном разложении Ли, изотропном
гиперупругом законе, в котором в качестве мер напряженного и деформированного состояния выбраны соответственно второй тензор Пиола–
Кирхгоффа и тензор деформаций Коши–Грина, определенные в терминах
промежуточной (разгруженной) конфигурации.
Основное отличие от известных моделей кристаллов заключается
в упомянутой выше «двухфазности» материала. Поликристалл представляется совокупностью «ядер» зерен и приграничных областей –
бикристаллов. При этом бикристаллические зоны подразделяются на
две подобласти – «внутреннюю» и «внешнюю» (для каждого зерна), ка84
ждая из этих подобластей «наследует» ориентацию систем скольжения
зерен, примыкающих к моделируемому участку границы. На границе
подобластей задаются дополнительные условия совместности по градиентам места и напряжениям. Полные деформации в «ядре» зерен и осредненные деформации в каждом би-кристалле полагаются равными
осредненным деформациям (т.е. принята гипотеза Фойгта).
Напряжения в зерне определяются осреднением по объему «ядра»
и бикристаллов, окружающих зерно (с учетом объемной доли «ядра»
и бикристаллической границы). В представительном объеме напряжения определяются осреднением по совокупности зерен (сумма напряжений в зернах, деленная на число зерен, составляющих представительный объем). Полагается, что ГНД накапливаются с ростом деформации
во внутренней части бикристаллов, их плотность определяется разностью пластических составляющих градиентов места в ядре и внутренней
части бикристаллов. Появление ГНД связывают с дополнительным (по
отношению к увеличению критических напряжений за счет СНД) упрочнением систем скольжения. Предлагаемая модель использована для
анализа одноосного растяжения образца с акцентом на проверку справедливости соотношения Холла–Петча. Результаты расчетов по предлагаемой
модели сопоставлялись с теоретическими результатами прямого конечноэлементного моделирования и экспериментальными данными для поликристаллической меди со средним размером зерна 14, 33 и 220 мкм, показано их хорошее соответствие. Дальнейшее развитие данной модели на
двухфазный материал (суперсплав на основе никеля) содержится в работе [167].
Построению физической теории, учитывающей наличие в деформируемом кристалле дислокаций двух типов – СНД и ГНД и основанной на термодинамическом подходе, посвящена работа [163]. Рассматривается случай малых градиентов перемещений, в силу чего системы
скольжения полагаются фиксированными в отсчетной конфигурации.
Наряду с мультипликативным разложением градиента места, скоростью
пластической составляющей последнего, выраженной через скорости
сдвига по СС, используются ротор и скорость ротора пластической составляющей градиента места, выражаемой линейной функцией скорости
сдвигов и градиента скорости сдвигов. Вводится эволюционное уравнение для скорости суммарной (СНД+ГНД) плотности дислокаций, скорость изменения которой также представляется квазилинейной функцией скоростей сдвига и градиентов скоростей сдвига. Предлагается об85
щая форма конститутивного соотношения, согласно которой отклик материала (например, тензор напряжений или свободная энергия) определяется независящей от выбора системы отсчета функцией температуры,
тензора деформаций Коши–Грина, плотности дислокаций, градиента
температуры, скорости сдвигов и градиента скорости сдвигов.
Рассматриваются два метода вывода балансовых и конститутивных соотношений, основанных на термодинамическом подходе (в обоих
используется неравенство Клаузиуса–Дюгема). В первом из них, названном моделью обобщенных внутренних переменных, сдвиги и градиенты сдвигов вводятся в уравнение баланса энергии и энтропии неявным образом через зависимость свободной энергии от указанных параметров. Во втором методе, названном «Модели внутренних степеней
свободы», скорости сдвигов явным образом вводятся в выражение для
скорости изменения полной энергии и энтропии, при этом появляется
необходимость в определении дополнительных параметров, сопряженных с новыми степенями свободы.
Предлагаются два способа определения плотности ГНД. В первом
из них, называемом моделью системы скольжения, векторная мера
плотности ГНД определяется для систем скольжения через градиенты
сдвигов по ним. Во втором способе, названном континуальным, векторная мера плотности ГНД вводится через ротор пластической составляющей градиента места. Для каждого из этих способов получены эволюционные уравнения для скорости изменения меры ГНД. В дальнейшем плотности СНД и ГНД вводятся в качестве аргументов функции
свободной энергии; установленные эволюционные уравнения для СНД
и ГНД вводятся в структуру полученных на основе термодинамического
подхода эволюционных и конститутивных уравнений. Для замыкания
полученной системы уравнений требуется дополнительное соотношение, не вытекающее из термодинамики; в качестве такого уравнения используется экспоненциальная зависимость скоростей сдвигов по СС от
энергии активации Гиббса и температуры. Описан алгоритм включения
предлагаемых моделей в конечно-элементную процедуру.
Вариант градиентной модели вязкопластичности предложен в работе [100]. В мультипликативное разложение градиента места авторами
вводится промежуточный член fg, переводящий пластически деформированную конфигурацию в промежуточную (разгруженную), f = f e ⋅ f g ⋅ f p .
Указанный член разложения связан с наличием ГНД и определяется по
86
градиентам сдвигов в активированных СС; при этом ГНД порождают
дальнодействующие поля внутренних напряжений. Скорости сдвигов
в СС определяются степенным вязкопластическим законом, включающим как изотропное упрочнение, так и кинематическое, при этом оба
члена в комбинированном законе упрочнения зависят от градиентов накопленных сдвигов. Детально описан алгоритм решения задачи. Решение
задачи на макроуровне осуществлено с использованием МКЭ. Для анализа влияния градиентных членов рассмотрен пример одноосного циклического нагружения (растяжение–сжатие) образца из монокристаллического
алюминия с сужением в центральной части. Отмечается, что учет градиентных членов ведет к более быстрому формированию шейки и к повышению
неоднородности пластических деформаций по образцу.
Широкий обзор работ по дислокационным дискретным и континуальным моделям представлен в статье [135]. Значительной внимание
уделяется мультипликативному разложению градиента места на разных
масштабных уровнях (монокристалла и поликристаллического агрегата)
и связи его пластической составляющей с плотностью ГНД.
В работе [111] рассматривается модификация вязкопластической
модели [63, 64]. Описание трансляционной моды деформации аналогично принятым в большинстве работ (мультипликативное разложение
градиента места, степенной вязкопластический закон); при этом упругими деформациями пренебрегается и упругая составляющая градиента
места полагается ортогональным тензором. Выделяются симметричные
и антисимметричные части скоростей сдвигов и напряжений Коши. Из
уравнения момента количества движения в пренебрежении массовыми
моментами следует
2σ (A) + Є ⋅ (∇ˆ ⋅ µˆ ) = 0,
(3.14)
где σ (A) – антисимметричная часть тензора напряжений Коши,
σ − σ T ) ; µ̂ – тензор моментных напряжений. Получено сле2(
дующее выражение принципа виртуальной мощности:
σ (A) = 1
∫σ
V
(S)
: δDdV + ∫ µˆ : δχdV = ∫ tˆ ⋅ δvdS + ∫ µˆ ⋅ δωdS,
V
S
(3.15)
S
87
где σ (S) – симметричная часть тензора напряжений Коши, ω – вектор
скорости «материального поворота» (вектор, ассоциированный с тензором вихря W), χ = ∇ˆ ωT , t̂ – вектор поверхностных сил, µ̂ – вектор поверхностных моментов. Для понижения порядка аппроксимации предлагается модификация уравнения (3.15), в которое вводится добавочный
поверхностный интеграл, позволяющий учесть разрывы в моментных
напряжениях на границах элементов. Приведен вывод конечноэлементных соотношений. Отдельный раздел посвящен определяющим
соотношениям для ротационной моды, в качестве которого предлагается
линейное уравнение, связывающее тензоры моментных напряжений
и скорости кривизны-кручения:
µ
χ
=L ,
µe
χe
где
L
константа
–
пропорциональности,
(3.16)
(
µ e = 1 µ : µT
L
)
1/2
,
χ e = ( Lχ : χ T ) . Эффективные моментные напряжения и кривизны1/ 2
кручения полагаются связанными линейным соотношением µ e = C χ e .
С использованием предлагаемой модели решены задачи исследования поведения моно- и бикристалла с ГЦК-решетками при осадке
в условиях плоскодеформированного состояния. Расчеты проводились
как с учетом моментных напряжений, так и без них; во втором случае
проведено сопоставление с моделью Бишопа–Хилла; отмечается, что
при уменьшении показателя скоростной чувствительности вязкопластической модели результаты приближаются к полученным по жесткопластической модели (Бишопа–Хилла). Показано, что учет ротационной
моды и моментных напряжений существенно влияет на форму свободной поверхности образца (особенно вблизи контактной поверхности
и поверхности раздела в бикристалле) и на зависимость нагрузки от деформации.
К данному направлению относится работа [128]. Отмечается, что
основанные на однородности деформирования (сдвигом) модели и связанной этим однородности распределения дислокаций в системах
скольжения оказываются недостаточно адекватными при описании поведения материала на более малых масштабах. Для описания локальных
88
искажений (кривизн-кручений) кристаллической решетки требуется
введение неоднородных дислокационных субструктур, которые авторы
также относят к ГНД. В связи с этим приведенная в [127] модель модифицируется введением дополнительной внутренней переменной – тензора плотности геометрически необходимых дислокаций и кинетического уравнения для неё, определяющего скорость изменения тензора
ГНД через градиент скорости сдвигов. Последнее при использовании
предлагаемой модели совместно с конечно-элементным пакетом требует в каждой гауссовой точке интегрирования вычисления указанных
градиентов, что существенно усложняет процедуру интегрирования,
в связи с чем значительная часть работы посвящена описанию предлагаемого авторами эффективного алгоритма интегрирования. Разработанный алгоритм встроен в коммерческий конечно-элементный пакет
MSC.Marc200x и использован для анализа деформирования простым
сдвигом монокристаллического алюминиевого образца. Сопоставление
результатов расчета (кривые сдвиговые напряжения – сдвиговые деформации, интенсивности деформаций на боковой поверхности образца; сдвиговая деформация – до 55 %) с полученными авторами экспериментальными
данными показывают хорошее соответствие. Для анализа влияния масштабного фактора проведены расчеты для образцов с уменьшенной высотой (1/2 и 1/10 от исходного); показано, что с уменьшением высоты образца повышаются сдвиговые напряжения и существенно изменяются поля
плотности дислокаций и разориентаций решетки.
В статье [129], являющейся развитием рассмотренных выше работ
авторов, отмечается важность учета в моделях поликристаллов границ
зерен, которые могут служить мощными препятствиями для мобильных
внутризеренных (решеточных) дислокаций. Предполагается, что подвижные дислокации могут пересекать границу зерен, оставляя в ней
дислокацию ориентационного несоответствия (ДОН), параметры которой авторы предлагают определять из условия минимума энергии ДОН.
Для моделирования влияния границ предлагается использовать, как
и для внутренности зерен, вязкопластическую модель с дополнительной
энергией активации, пропорциональной энергии образования ДОН. Для
численной реализации модели также применяется конечно-элементный
пакет MSC.Marc200x и специальные элементы для учета границ зерен.
Разработанная модель применена для анализа процесса деформирования бикристалла с ГЦК-решеткой (алюминий) для трех разориентировок (авторы называют их «малой», «средней» и «большой»). В про89
веденных экспериментах и численных расчетах (простой сдвиг до 50 %)
показано, что по мере увеличения разориентировок возрастает неоднородность интенсивности деформаций в кристаллах, составляющих бикристалл, что обусловлено возрастающим сопротивлением движению
дислокаций границы кристаллов. Сопоставление результатов экспериментально измеренных на боковой поверхности образца интенсивностей деформаций и ориентировок с данными расчетов показывает хорошее соответствие.
В статье [130] рассматривается модификация предложенной авторами модели [128, 129] для описания поведения моно- и поликристаллов
с ОЦК-решеткой. В отличие от ГЦК-кристаллов, где барьер Пайерлса мал
по сравнению с сопротивлением дислокаций леса движению мобильных
дислокаций, для ОЦК-кристаллов, напротив, можно пренебречь напряжениями от леса дислокаций в сравнении с напряжением Пайерлса; в остальном модель не отличается от изложенной в цитируемых выше работах.
Модифицированная модель использована для анализа деформирования
бикристалла ниобия при выдавливании образца через прямоугольную матрицу. Результаты расчетов сопоставляются с данными проведенных авторами экспериментов. Отмечается, что лучшее соответствие достигается
при использовании для ОЦК-решетки в качестве потенциально активных
систем скольжения <111>, {110} и <111>, {112}.
3.4. РОТАЦИОННЫЕ МОДЫ ДЕФОРМИРОВАНИЯ,
МОДЕЛИ РОТАЦИИ
В работах В.Е. Панина, В.В. Рыбина указывается, что существенную роль в инициации поворотов решетки играет несовместность
скольжения дислокаций в соседних зернах. Действительно, в реальном
поликристалле происходит достаточно сложный процесс: при больших
деформациях появляются субзерна, фрагменты, которые начинают разворачиваться, начиная от границ с соседними зернами. Активируется
так называемая ротационная мода пластичности [34]: «Вследствие несовместности пластической деформации в граничащих зернах возникают
внутренние напряжения, активизирующие новые (аккомодационные)
СС. В стыках фасеток зерен возникают разориентировки участков зерна,
примыкающих к разным фасеткам (т.е. возникает стыковая дисклинация). Далее стыковая дисклинация распространяется в тело зерна, т.е.
90
превращается в обычную дисклинацию, образующую новую границу
разориентации (границу фрагмента). С этой границей вновь взаимодействуют решеточные дислокации, вновь образуются стыковые дисклинации и т.д. Таким образом, процесс фрагментации начинается с границ
зерен и постепенно распространяется в глубь зерен».
Разумеется, детальное описание столь сложной физики процесса
на настоящем этапе вряд ли возможно, так как требуется введение еще
одного масштабного уровня, внутренних переменных на нем, эволюционных уравнений для внутренних переменных на основе анализа действующих механизмов. Как правило, в многоуровневых моделях в рамках
принятого ограничения иерархии масштабных уровней повороты решетки описываются интегрально по зернам (по существу, при больших
деформациях под зернами надо понимать «эффективные» зерна со
средними по объему зерна характеристиками), однако предпринимается
попытка более детального учета физики процесса. С этой целью поворот решетки (эволюция ортогонального тензора, связывающего КСК
и ЛСК) представляется суммой двух составляющих: поворота решетки
зерна в предположении его изолированности (далее этот поворот называется «материальным», который определяется ортогональным тензором, сопровождающим упругую деформацию) и поворота только решетки зерна при сохранении конфигурации зерен в физическом пространстве («решеточной» поворот), движущая сила этого поворота –
несовместность движения дислокаций в соседних зернах.
Модели ротации решетки
Наиболее популярными моделями поворота решетки являются
модель стесненного поворота Тейлора, определяющая спин решетки как
разность тензора вихря и антисимметричной части тензора пластических сдвигов, и модель, связывающая поворот решетки с материальным
поворотом, определяемым ортогональным тензором, сопровождающим
упругую деформацию.
Стесненный поворот по Тейлору
Согласно модели стесненного поворота Тейлора в современной
интерпретации [178] градиент скорости перемещений на мезоуровне
(уровне зерна) представляется в виде:
91
( )
l = ∇ˆ v
T
K
= ω1 + ∑ γ i b i n i ,
(3.17)
i =1
где ∇ˆ – оператор Гамильтона, определенный в актуальной конфигурации, ω1 – антисимметричный тензор спина решетки зерна, остальные
величины определены выше. Соотношение (3.17) предполагает для связи моделей мезо- и макроуровней (вместо первоначально используемой
самим Тейлором [164] гипотезы однородности деформаций (гипотезы
Фойгта)) использование «расширенной» гипотезы Фойгта, устанавливающей однородность градиентов скоростей перемещений l = L . В силу
того, что в рамках этой гипотезы материал полагается «стесненным»
(деформации зерен ограничены соседями), модель Тейлора часто называют «полностью стесненной».
С учетом l = L из соотношения (3.17) тензор спина решетки зерна
ω1 можно выразить следующим образом:
K
1
ω1 = w − w p = w + ∑ γ i (n i bi − bi ni ) ,
i =1 2
(3.18)
1 ˆ T ˆ
1
((∇v ) − ∇v ) = (L − LT ) .
2
2
Отметим, что первоначально модель поворота решетки Тейлора
была предложена для жесткопластической модели внутризеренного
деформирования, поэтому анализ (3.18) логично провести для такой
модели. Тогда при отсутствии скольжения дислокаций деформирование отсутствует, вращение решетки зерна согласно (3.18) описывается
тензором вихря ω1 = w – зерно вращается как жесткое тело, что соот-
где w – тензор вихря, w = W =
ветствует представлению движения согласно теореме Коши–Гельмгольца [31].
Модель «материального» поворота
Другим популярным для описания поворотов решетки является
следующий подход: для описания кинематики используется мультипликативное разложение Ли градиента места, поворот решетки связывается
с материальным поворотом, который определяется ортогональным тензором r e , сопровождающим упругую деформацию.
92
Отметим, что при использовании данной модели, как и при использовании модели стесненного поворота Тейлора, принимается «расширенная» гипотеза Фойгта, предполагающая однородность градиентов
деформации f = F (градиентов скоростей перемещений l = L ).
Градиент деформации F (транспонированный градиент места), линейно связывающий материальные отрезки dR в отсчетной К0 и dr
в текущей Kt конфигурациях ( dr = F ⋅ dR ) представляется мультипликативным разложением упругой и пластической составляющих градиента
деформации [31]:
o
o
F = (∇ r )T = F e ⋅ F p = (∇ ×r )T ⋅ (∇ r× )T ,
(3.19)
где R, r, r× – радиус-векторы частицы в отсчетной K0, актуальной Kt и
промежуточной (разгруженной) Kx конфигурациях (последняя получается из текущей разгрузкой до достижения нулевых напряжений), ∇ × –
оператор Гамильтона, определенный в Kx; аналогичные соотношения
справедливы на мезоуровне.
Упругая составляющая градиента деформации мезоуровня f e
представляется в виде полярного разложения
f e = r e ⋅ ue = ve ⋅ r e .
(3.20)
Материальный поворот связывают с ортогональным тензором r e ,
сопровождающим упругую деформацию (называемым также тензором
ротации). Пластическая составляющая градиента деформации определяется соотношением:
K
0
0
f p ⋅ (f p ) −1 = ∑ γ i bi ni ,
(3.21)
i =1
0
0
где векторы bi , ni – единичные векторы в направлении вектора Бюргерса (направления сдвига) и нормали для системы скольжения, определенные в отсчетной конфигурации.
Таким образом, в результате воздействия (деформирования) произвольное зерно с некоторой ориентацией испытывает пластические
сдвиги (без изменения ориентации решетки), упругие искажения и по93
вороты; с последними связывается квазитвердое движение (конечные
повороты как жесткого целого [31]), которое, в свою очередь, в рамках
рассматриваемой модели и описывает поворот решетки зерна.
Сравнение моделей ротации решетки
Для сравнения (с математической точки зрения) вышеприведенных моделей поворота решетки необходимо для модели «материального» поворота определить спин решетки ω 2 .
Используя разложение (3.19), полярное разложение (3.20), малость
упругих деформаций, можно показать, что тензор спина решетки ω 2 при
квазистатическом нагружении определяется согласно [57]:
ω 2 = w e = w − w p − (B : σ ) ⋅ d p + d p ⋅ (B : σ ) ,
где w = W =
(3.22)
K
1
1
(L − LT ) , w p = (ˆl p − (ˆl p )T ) = ∑ γ i (bi n i − ni bi ) ,
2
2
i=1
K
1
d p = (ˆl p + (ˆl p )T ) = ∑ γ i ( bi ni + ni bi ) ,
2
i=1
B = Π –1 – тензор четвертого ранга упругой податливости.
Учитывая, что согласно модели стесненного поворота Тейлора спин
решетки есть ω1 = w − w p , получаем связь спинов решетки для моделей:
ω2 = ω1 − (B : σ) ⋅ dˆ p + dˆ p ⋅ (B : σ) .
(3.23)
Таким образом, при квазистатическом деформировании рассмотренные модели поворотов решетки в силу малости упругих деформаций
B : σ будут давать незначительно отличающиеся результаты.
Существующие в настоящее время ФТП можно разделить на три
широких класса: жесткопластические модели, упругопластические модели и (упруго) вязкопластические модели [45–48]. Ниже остановимся
на каждом из этих классов отдельно.
94
ВОПРОСЫ К ГЛАВЕ 3
1. Выведите уравнение Орована.
2. Перечислите кристаллографические системы, по которым осуществляется движение краевых дислокаций в ГЦК- и ОЦК-кристаллах.
3. По каким системам реализуются сдвиг и двойникование в ГПУкристаллах?
4. Что называется неконсервативным движением дислокаций, и за
счет каких механизмов оно реализуется?
5. Приведите соотношение для тензора деформации скорости при
произвольном движении краевых и винтовых дислокаций, проверьте его
выполнение для скольжения и переползания одиночных дислокаций.
6. Приведите кинематические соотношения, определяющие деформирование при двойниковании.
7. Дайте определения статистически накопленных и геометрически необходимых дислокаций. Каковы физические механизмы их формирования? С помощью каких моделей они вводятся в описание неупругого деформирования?
8. Опишите физические причины возникновения поворотов кристаллической решетки?
9. Опишите модель поворота Тейлора.
10. Приведите соотношения для описания «материального поворота», сопоставьте их с уравнениям модели поворота Тейлора.
95
ГЛАВА 4. ЖЕСТКОПЛАСТИЧЕСКИЕ МОДЕЛИ
4.1. МОДЕЛЬ ЗАКСА
Одной из первых попыток построения одномерной модели поликристалла на основе рассмотрения совокупности монокристаллов была
модель Закса [133, 158]. В данной модели зерна полагались ориентированными хаотически (по равномерному закону), взаимодействием между зернами пренебрегалось (в силу чего эту модель можно назвать
«полностью несовместной» как по деформациям, так и по напряжениям). Модель Закса в исходной формулировке предназначена только для
определения предела текучести при одноосном растяжении поликристаллического образца по известному значению критического напряжения сдвига в системах скольжения (СС) кристаллитов (зерен) и заданному закону распределения ориентаций кристаллографических систем
координат (КСК) зерен по отношению к лабораторной системе координат (ЛСК).
Рассмотрим одноосное нагружение цилиндрического образца из
поликристаллического материала; ось х1 с единичным вектором базиса
е1 направим вдоль оси образца. В рассматриваемом случае все компоненты тензора напряжений Коши σ за исключением σ11 полагаются нулевыми. Мысленно пересечем образец плоскостью, перпендикулярной
его оси, и выделим все зерна, пересекаемые данным сечением (рис. 4.1).
В модели Закса полагается, что каждое из зерен также находится в состоянии однородного одноосного растяжения (сжатия), как и образец
в целом, однако величины напряжений σ11 в каждом зерне могут отличаться от напряжений в других зернах.
Принимается, что достижению предела текучести образца в целом
соответствует активизации хотя бы одной СС в каждом зерне сечения.
Величина напряжений в каждом зерне определяется из условия достижения касательным напряжением в наиболее благоприятно ориентированной СС («слабейшем звене») величины критического напряжения
сдвига τ c , считающейся известной для анализируемого типа кристаллитов и одинаковой для всех зерен. Таким образом, для каждого из зерен,
96
попавших на введенное сечение, зная ориентацию КСК относительно
ЛСК, вначале определяется фактор Шмида
m((nk)) =
σ (k ) (k )
: b( n)n( n ) , ( ∑ )
σ
(k )
для каждой из СС данного зерна (для рассматриваемого случая одноосного нагружения
m((nk)) = e1e1 :b((kn))n((kn)) , ( ∑ )) ,
(k )
где п – номер зерна, после чего устанавливается его максимальное зна(n)
определяется как
чение. Далее для каждого п-го зерна напряжение σ11
(n)
σ11
= τ c / max m((nk)) .
k
Рис. 4.1. Схема к модели Закса
Обозначив через S(n) площадь поперечного сечения n-го зерна, пересекаемого введенным сечением, а через S – площадь поперечного сечения образца в целом, предел текучести при одноосном нагружении
определяется тогда соотношением:
N
∑σ
(n)
11
σs =
n =1
S
S( n )
.
Расчеты по модели Закса дают значение макроскопического напряжения текучести σs , равное 2,2τc. Хотя полученный результат суще97
ственно (примерно на 30 %) отличается от экспериментально определенного предела текучести, его все же следует признать удовлетворительным для своего времени.
К основным недостаткам модели Закса относятся невыполнение
условий равновесия и совместности деформаций соседних зерен, неучет
упругих деформаций; указанные недостатки отмечаются во многих работах (например, [119], где приведен и краткий обзор ранних работ по
физическим теориям пластичности). Модель Закса может быть использована для определения предела текучести при одноосном нагружении,
для построения кривой σ–ε требуются дополнительные предположения.
4.2. МОДЕЛЬ ТЕЙЛОРА
Вероятно, первой достаточно реалистичной попыткой установления связи σ–ε при одноосном нагружении поликристалла на основе соотношений для монокристалла можно признать модель Тейлора [164].
При её построении Тейлором использованы следующие гипотезы:
1. Поликристалл представляет собой агрегат из большого числа
хаотично ориентированных (по равномерному закону) зерен.
2. Поведение каждого из зерен описывается жесткопластической
моделью; деформации зерен осуществляются только кристаллографическим сдвигом по известным для данного материала кристаллографическим системам скольжения (СС).
3. Упрочнение одинаково во всех системах скольжения и определяется свойствами монокристалла.
4. Границы зерен имеют нулевую толщину, не осуществляют
вклада в механизмы неупругого деформирования.
5. Деформации (или деформации скорости) полагаются однородными в пределах макроскопического представительного объема (гипотеза Фойгта), т.е. ε ≡ εp(n) = <εp> = ε (или d ≡ dp(n) = <dp> = Dp = D), n –
номер кристаллита (зерна). Кроме того, поскольку деформации осуществляются сдвигом, в этом случае отсутствует изменение объема, т.е.
εp (n) = ep(n) = <ep> (или d´p(n) = dp(n), d´– девиатор тензора d).
В кристаллах с ГЦК- и ОЦК-решеткой число СС существенно превышает число независимых компонент девиатора деформаций (см. п. 3.1),
что обусловливает неоднозначность определения сдвигов по СС по заданному девиатору деформаций. Указанное обстоятельство является одной из
существенных трудностей построения физических теорий пластичности.
98
Для ее преодоления Тейлором был предложен эвристический
принцип, суть которого состоит в следующем. Полагается, что любая
деформация (или приращение деформации) осуществляется сдвигом не
более чем по пяти независимым CC, определенным из условия минимальности суммарного сдвига. Представляющий, по существу, гипотезу
данный принцип минимума сдвига основывался на наблюдениях за поведением одиночных кристаллов.
Обозначим через dγ (( kn )) приращение сдвига в n-м зерне по k-й CC
(соответствующая скорость сдвига обозначается как γ (( kn )) ). Тогда принцип минимума сдвига математически записывается в виде
Kn
∑γ
(k )
(n)
→ min
∀n = 1, N ,
(4.1)
k =1
при этом в силу принятой гипотезы Фойгта должно выполняться ограничение
Kn
∑m
γ
(k )
(k )
(S)( n ) ( n )
= d′
∀n = 1, N ,
(4.2)
k =1
где d´ = D´ – предписанный (заданный в каждый момент деформирования) девиатор деформации скорости; здесь в обозначении ориентационного тензора появился индекс п, относящийся к номеру зерна; в дальнейшем он будет сохраняться только в случае, если из контекста не ясно, что ориентационный тензор относится к системам скольжения
определенного зерна. Заметим, что в случае отказа от предположения об
изотропном упрочнении в каждом из зерен принцип минимума сдвига
трансформируется в принцип минимума мощности, согласно которому
действительные скорости сдвига доставляют минимум мощности (по
сравнению с кинематически возможными скоростями сдвигов):
Kn
∑τ
(n)k
c
γ (( kn )) → min
∀n = 1, N .
(4.3)
k =1
Более подробно принцип минимума мощности рассмотрен ниже.
Как отмечено выше, критические напряжения сдвига в исходной
модели Тейлора приняты одинаковыми во всех системах данного зерна
и обозначаются как τ (cn ) . Тогда элементарная работа dA(п), произведенная в п-м зерне объемом V(п), определяется соотношением:
99
Kn
dA ( n ) = V ( n ) τ c( n ) ∑ dγ (( kn )) ,
(4.4)
k =1
где Кn – число активных систем скольжения в данном п-м зерне в рассматриваемый момент нагружения.
Элементарная работа dA, производимая на сдвигах по активным CC в
агрегате из N монокристаллов, определяется следующим соотношением:
N
Kn
n =1
k =1
dA = ∑ V ( n ) τ (cn ) ∑ dγ (( kn )) .
(4.5)
Заметим, что в правой части (4.5) суммирование по числу активных CC осуществляется от 1 до Kn, т.е. в различных зернах это число
может быть различным (1≤ Kn ≤ 5).
В модели Тейлора полагается, что вся подводимая к образцу механическая энергия расходуется на совершение пластической деформации.
В случае одноосного нагружения (при действии напряжения Σ11) элементарная работа внешних сил в предположении одноосного макроскопического напряженно-деформированного состояния определяется как
Σ11dε11 ( ∑ V ( n ) ) ≡ Σ11dε11p ( ∑ V ( n ) ) .
Тогда, приравнивая работу внешних напряжений и работу внутренних сдвиговых напряжений, получаем:
Kn
N
N
Σ11dε11 ∑ V ( n ) = ∑ V ( n ) τ (cn ) ∑ dγ (( kn )) .
k =1
n =1
n =1
(4.6)
Предполагая, что все зерна имеют одинаковый объем, окончательно получаем:
1
Σ11dε11 =
N
( n ) Kn ( n )
τ c ∑ dγ ( k ) .
∑
n =1
k =1
N
(4.7)
Последнее соотношение позволяет построить кривую одноосного
нагружения поликристалла с использованием модели монокристалла.
Процедура пошагового построения кривой состоит в следующем:
– Пусть кривая построена для определенной предшествующей (макро)
деформации ε11, т.е. известны напряжения Σ11 во все предшествующие момен100
ты нагружения, накопленные сдвиги, критические напряжения сдвига во всех
зернах; ориентация зерен полагается неизменной и известной.
– Задается достаточно малое приращение деформации ∆ε11, являющееся
одновременно приращением главной деформации ∆ε1 = ∆ε11; из условия несжимаемости определяются два других главных значения приращений деформаций ∆ε2 = ∆ε3 = –1/2∆ε1 (при этом ∆ε2 = ∆ε22, ∆ε3 = ∆ε33, все остальные
компоненты тензора ∆ε равны нулю). Следует подчеркнуть, что в данном слу-
чае главные оси тензоров
ε и ∆ε совпадают и неизменны. По заданному тен-
зору ∆ε данного шага нагружения в каждом зерне определяются приращения
сдвигов по активным СС, обеспечивающие минимальность приращения
суммарного сдвига.
– По накопленным сдвигам (с учетом приращений на рассматриваемом шаге) определяются критические напряжения сдвига в каждом
зерне τ (cn ) , n = 1, N , после чего легко определяется значение правой части
(4.7) и величина Σ11.
Тейлор применил описанную процедуру для построения кривой
одноосного деформирования алюминия (ГЦК-решетка). Результаты
расчета хорошо согласуются с экспериментальными данными, что подтверждает приемлемость модели для рассмотрения, по крайней мере,
одноосного нагружения.
Таким образом, модель Тейлора [164] сводится к минимизации
мощности работы на сдвигах (в пространстве скоростей сдвигов) (4.3)
при ограничении (4.2), после чего для определения девиатора напряжений используется закон Шмида с ориентационными тензорами, соответствующими активным системам скольжения.
Постановку задачи минимизации мощности для каждого зерна
можно переформулировать следующим образом. Введем обозначения
(определив компоненты тензоров в базисе ЛСК и опуская знак симметризации (S)):
c = {τ1c , τ c2 , ..., τ 5c } , x = {γ1 , γ 2 , ..., γ 5 } ,
T
T
1
A = Aij , A11 = m11
, A12 = m112 , ..., A15 = m115 ,
......................................................................
1
2
5
A51 = m31
, A52 = m31
, ..., A55 = m31
,
b = {bi } , b1 =d11 , b2 =d 22 , b3 =d12 , b4 =d 23 , b5 =d31.
101
Тогда задачу (4.3)–(4.2) можно записать в канонической форме задачи линейного программирования [29]:
min cTx,
Ax = b,
(А)
x ≥ 0.
Процедура решения следующая: из решения возможных для данного типа кристаллов систем линейных алгебраических уравнений (А2)
(каждая из систем содержит в общем случае 5 уравнений) определяются
соответствующие наборы скоростей сдвигов; из них сразу «отбраковываются» решения, содержащие отрицательные компоненты вектора х.
Из оставшихся «наборов» определяется удовлетворяющий (А1). Достаточно подробно процедура решения, основанная на технике линейного
программирования, рассмотрена в [176].
Отметим, что сформулированной выше классической задаче линейного программирования (А) можно, используя формализм линейного программирования [29], поставить в соответствие эквивалентную ей
двойственную задачу:
max bT λ ,
AT λ ≤ c,
(Ад)
где λ = {λ i } , λ1 = s11 , λ 2 = s22 , λ 3 = s12 , λ 4 = s23 , λ 5 = s31.
Этот двойственный принцип максимума работы, в котором варьируемыми параметрами являются напряжения, был доказан в работах
Бишопа–Хилла [73–74], исходя из физики пластичности монокристалла.
Задача максимизации мощности (Ад) также представляет собой задачу
линейного программирования, решение которой соответствует одной их
вершин многогранника текучести; из теории линейного программирования известна эквивалентность этих формулировок.
Заметим, что в собственно модели Тейлора девиатор напряжений
вообще отсутствует, напряжения априори полагаются такими, что активизируют все необходимые для реализации предписанной скорости деформации системы скольжения, причем число СС равно числу независимых компонент девиатора напряжений. Компоненты девиатора напряжений определяются на втором этапе, после определения активных
СС и скоростей сдвига по ним. Для этого используется закон Шмида,
представляющий в этом случае систему линейных алгебраических
уравнений относительно компонент девиатора напряжений (число
уравнений равно числу активных систем скольжения).
T
102
Резюмируя, можно отметить следующие проблемы, возникающие
при применении модели Тейлора:
– неединственность определения совокупности 5 скоростей сдвига, реализующих предписанный девиатор скоростей деформаций;
– возможное несоответствие напряженного состояния виду нагружения (например, при одноосном нагружении напряженное состояние
может отличаться от одноосного);
– невозможность определения тензора напряжений по скоростям
девиатора деформаций, поскольку имеем материал со связью (несжимаемость);
– не исключена ситуация, когда минимум мощности достигается
на совокупности систем скольжения с числом нетривиальных скоростей
сдвига, меньшем 5 (например, при совпадении систем скольжения
с плоскостями и направлениями главных скоростей сдвига). Эта ситуация соответствует нахождению изображающей точки в пространстве
напряжений (ИТН) на грани или ребре многогранника текучести. Ряд
авторов трактует данную ситуацию как так называемое вырождение
системы уравнений. Это представляется не совсем верным. Действительно, в модели Тейлора поиск осуществляется именно в вершинах
многогранника, и число уравнений должно соответствовать числу неизвестных компонент девиатора напряжений (случай большего числа
упомянут выше). Однако в данном случае (4.3) не дает критерия отбора
единственного набора активных систем скольжения и решению с точки
зрения минимума мощности сдвига удовлетворяют все ИТН в вершинах
многогранника текучести, примыкающие к данной грани или ребру, хотя напряжения при этом существенно отличаются. Последнее возможно,
например, в случае чистого сдвига при ориентации одной из систем
скольжения, в точности соответствующей сдвигу по данной системе;
– невыполнение условий равновесия на границах зерен;
– сложность реализации модели, связанная с необходимостью определения активных систем скольжения и сдвигов в них, доставляющих
минимум суммарному сдвигу. Процедура решения данной задачи минимизации оказывается весьма трудоемкой;
– неучет в модели Тейлора упругих деформаций.
Достаточно грубым является также предположение об однородности деформаций и напряжений в поликристаллическом агрегате, что не
соответствует теоретическим (см., например, [156]) и экспериментальным результатам, особенно в случае сложного нагружения. В реальных
103
процессах деформирования микродеформации и микронапряжения неоднородны даже в пределах каждого зерна и субзерна.
Заметим, что часть (п. 2, 3, 4) из указанных выше недостатков
в известных авторам работах не отмечалась. Однако и отмеченных ранее оказалось вполне достаточно, чтобы стимулировать исследователей
к совершенствованию модели Тейлора. В первую очередь появились
работы, направленные на «подведение» под модель Тейлора более глубокой математической «базы», замена интуитивно высказанных положений математически строго доказанными. Значительное внимание
в работах последнего десятилетия уделяется законам упрочнения по
системам скольжения. Например, в работе [174] за основу принимается
закон упрочнения типа Воуса, который модифицируется для учета взаимодействия дислокаций разных систем скольжения, в том числе аннигиляции дислокаций при изменении направления нагружения. При этом
основные положения и гипотезы модели Тейлора остались неизменными. К числу наиболее ярких работ этого направления относятся статьи
Бишопа и Хилла [73, 74], подробно анализируемые ниже.
4.3. МОДЕЛЬ БИШОПА–ХИЛЛА
С точки зрения физических гипотез модель Бишопа–Хилла практически не отличается от модели Тейлора, основное отличие состоит
в ее математической строгости, наличии доказательств основных положений, принимаемых в модели Тейлора как постулаты. По существу,
данная модель (равно, как и модель Тейлора) является двухуровневой
(мезо- и макроуровни). В модели макроуровня используется понятие
поверхности текучести, f (S) = σs, при этом построение поверхности текучести осуществляется с применением модели мезоуровня; принима∂f
. Полаются соотношения ассоциированного закона течения, D′ p = λ
∂S
гается, что упругими деформациями можно пренебречь; пластическое
деформирование осуществляется без изменения объема, D´p = Dp. В теории используется также известный в теории пластичности принцип максимума работы: из всех возможных (т.е. не нарушающих условие текучести) напряжений действительное напряжение производит максимальную работу на приращении (пластических) деформаций.
104
В цитируемых работах Бишопа и Хилла доказывается также обратное (в определенном смысле) утверждение: если для заданного dε
напряжения Σ доставляют стационарное (или максимальное) значение
работе по сравнению со всеми близкими напряжениями Σ*, не выходящими за пределы поверхности текучести, то существует пластический
потенциал, и он совпадает с поверхностью текучести; в случае максимальности работы соответствующая поверхность (изопотенциальная
или поверхность текучести) является строго выпуклой.
На мезоуровне (уровне зерна) модель использует все основные
предположения, принятые в модели Тейлора. Полагается, что упрочнение одинаково в активных и неактивных системах скольжения; однако
при этом в активных системах возможно различие критических напряжений по противоположным направлениям скольжения, т.е. условие текучести имеет вид
f (s) = m ((S)k ) : s – τ (ck ) = 0, k = 1, 2 K .
В оригинальном варианте модели [73, 74] законы упрочнения
практически не обсуждаются, поскольку не приводят к изменению
структуры теории и ее основных соотношений.
Для монокристалла формулируется и доказывается принцип максимальности (максимума) работы. Пусть dε – приращение деформации,
реализующееся в монокристалле, σ – тензор напряжений, вызывающий
эту деформацию. Пусть имеется другой тензор напряжений σ*, не нарушающий условие текучести. Через dγ (k) обозначим элементарные
k)
сдвиги по активным системам скольжения, так что dε = ∑ m((S)
dγ( k ) ,
k
причем суммирование ведется только по номерам активных систем
скольжения. На активных системах скольжения должно выполняться
условие текучести, т.е. m ((S)k ) : σ ≡ τ (k) =
τ (ck ) . Обозначим: τ* (k) = m ((S)k ) : σ* –
сдвиговое напряжение в k-й системе скольжения, соответствующее напряжению σ*. В силу предположения о допустимости σ* (т.е. ненарушение условия текучести) имеем:
τ∗(k ) ≤ τ c(k ) .
(4.8)
105
Отметим также, что знаки dγ(k) и τ(k) в данном случае всегда одинаковы и положительны (каждое из направлений в плоскости скольжения
образует собственную систему скольжения). Тогда нетрудно установить
следующее соотношение:
dA – dA∗ = σ : dε – σ ∗ : dε = (σ – σ ∗ ) : dε = ∑ ( τ (ck ) – τ∗( k ) ) dγ ( k ) ≥ 0,
откуда
dA = σ : dε = ∑ τ (ck ) dγ ( k ) ≥ ∑ τ ∗( k ) dγ ( k ) = σ ∗ : dε = dA∗ .
(4.9)
Соотношение (4.9) представляет собой математическую запись
принципа максимальной работы для монокристалла. Следует отметить,
что здесь принцип доказывается, а не постулируется, как это принято
в классической теории пластичности.
Отметим, что в физических теориях часто используются понятия
геометрически и физически возможных систем сдвигов или при векторном представлении γ в R – соответствующих векторов сдвига. Вектор
сдвига γ называется геометрически возможным, если он реализует предписанную пластическую деформацию εp (аналогично – для приращений
dγ и dεp или скоростей γ , d p ). Вектор dγ называется физически возможным, если он реализуем для данного напряженного состояния, т.е. в соответствующих системах скольжения выполняется условие текучести.
Для определения физически и геометрически возможных векторов
(приращений) сдвига dγ в теории Бишопа–Хилла используется упомянутый выше принцип минимума сдвига. Пусть dε – задаваемое приращение деформаций, σ – тензор напряжений, инициирующий эту деформацию активизацией приращения сдвига dγ и удовлетворяющий условию текучести. Предположим, что dγ* – вектор приращения сдвига,
также эквивалентный dε (т.е. геометрически возможный), однако не
обязательно вызываемый некоторым напряжением, удовлетворяющим
условию текучести (т.е. не являющийся физически возможным). Заметим, что в силу выполнения условия текучести для тензора σ компоненты τ (k) вектора сдвиговых напряжений τ в любой k-й системе скольжения не превосходят критического напряжения сдвига τ (ck ) . Для геометn
рически и физически возможного вектора dγ в К активных системах
106
скольжения τ(k) = τ (ck ) , в остальных dγ(l) = 0. При этом в активных системах скольжения знаки dγ(k) и τ(k) совпадают и положительны. Для геометрически (но не физически) возможного вектора dγ* в каждой системе
скольжения |τ(k)| ≤ τ (ck ) , при этом знаки dγ*(k) и τ(k) могут быть произвольными (т.е. и dγ*(k), и τ(k) могут быть как положительными, так и отрицательными).
С учетом изложенного выше получаем:
σ : dε = τ ⋅ dγ = ∑ τ ( k ) dγ ( k ) = ∑ τ ( k ) dγ∗( k ) ,
∑τ
(k )
dγ ( k ) = ∑ τ (ck ) dγ ( k ) ,
∑τ
(k )
dγ∗( k ) ≤ ∑ τ ( k ) dγ∗( k ) ≤ ∑ τ (ck ) dγ∗( k ) .
Следовательно,
∑τ
(k )
c
dγ ( k ) ≤ ∑ τ (ck ) dγ∗( k ) .
(4.10)
Последнее соотношение представляет принцип минимума сдвига
Тейлора, расширенный на случай неоднородного упрочнения; иногда
его называют принципом минимума работы. Полагая, что упрочнение
одинаково во всех системах скольжения, из (4.10) получаем:
∑ dγ
(k )
≤ ∑ dγ∗( k ) ,
(4.11)
представляющее собой математическую запись принципа минимума
сдвига Тейлора: сумма абсолютных значений приращений физически и
геометрически возможных сдвигов не превосходит суммы абсолютных
значений приращений геометрически возможных сдвигов. Из доказательства следует также, что если существует более одной системы физически
и геометрически возможных сдвигов, то сумма абсолютных значений
приращений сдвигов во всех таких системах будет одинаковой.
Остановимся на соответствии двух сформулированных выше
принципов, один из них – принцип максимума работы, второй – принцип минимума работы. При формулировке экстремальных принципов
(более широко – вариационных принципов) важно различать параметры, которые можно изменять (перебирать, варьировать). В зависимости
от этого величина, экстремальность которой устанавливается, может
принимать максимальное или минимальное значение (а может не обла107
дать экстремальными свойствами, в каждом конкретном случае последние надо устанавливать). Аналогичным образом дело обстоит и с рассматриваемыми принципами. В первом из них – принципе максимума
работы – варьируемой величиной является тензор напряжений, а бесконечно малое приращение деформаций является величиной заданной,
неизменной в данный момент процесса. Во втором принципе ситуация
«зеркально отражается»: тензор напряжений считается заданным,
а варьируемыми параметрами являются бесконечно малые приращения
сдвигов. Такие принципы в математической физике и вариационном исчислении называются двойственными (друг другу), из одного с помощью так называемого преобразования Лежандра следует другой, и наоборот (см., например, [20]).
Заметим, что в отличие от предположения Тейлора о том, что деформация реализуется сдвигом не более чем по пяти системам скольжения, здесь такого предположения не вводится, число активных систем
скольжения ограничивается только числом возможных кристаллографических систем, что еще более усугубляет проблему неоднозначности
определения сдвигов. Нетрудно видеть, что принцип минимума сдвига
не позволяет определить единственный набор систем скольжения, он
обеспечивает только «отбраковку» векторов сдвига, не являющихся физически возможными.
Хотя в физических теориях пластичности большое внимание уделяется построению моделей монокристаллов, главной задачей является
формулировка конститутивной модели представительного объема макроуровня для поликристаллических материалов, без чего невозможны
постановка и решение практически важных краевых задач МДТТ.
В связи с этим неминуемо встают вопросы о переходе от переменных
и соотношений мезоуровня к переменным и соотношениям макроуровня, о процедурах идентификации и верификации разрабатываемых моделей. При этом одним из важных компонентов модели становится принимаемая процедура осреднения.
Физические теории пластичности в их различных модификациях
в значительной мере опираются на макроэксперименты. В частности, из
макроэкспериментов определяются физические параметры (или часть из
них), фигурирующие в описании микродеформирования; правильность
основных положений ФТП проверяется в конечном счете также в опытах на макрообразцах. В связи с вышеизложенным в замкнутой ФТП
108
должны присутствовать подходы и соотношения, позволяющие связывать микро- и макропеременные.
При проведении экспериментов и интерпретации результатов
в рассмотрение входят напряжения и деформации, осредненные по
большому числу мезоэлементов (кристаллитов). Понятно, что интерпретация результатов макроэкспериментов с позиций ФТП существенным
образом связана с принимаемой процедурой осреднения. Ниже рассматриваются некоторые аспекты принятого в теории Бишопа–Хилла подхода к осреднению, опирающегося на две основные гипотезы о связи
микро- и макропараметров:
а) Измерения макропеременных осуществляются на таких объемах, что распределение ориентаций и упрочнения зерен в различных
объемах отличаются несущественно. Иначе говоря, образец полагается
однородным в макросмысле. Следует отметить, что это не исключает из
рассмотрения анизотропные материалы, поскольку распределение ориентаций не обязательно равномерное, могут реализовываться случаи
преимущественной ориентации в определенных направлениях.
В дальнейшем наименьший объем, обладающий подобными свойствами, будем называть «единичным» кубом (имеющим в действительности форму куба и единичные ребра).
б) Отсутствует корреляция между мезоскопическими напряжениями и положением на плоскости произвольного сечения единичной
площади. Данное предположение позволяет представить результирующую мезонапряжений на такой единичной площадке как одиночную силу, приложенную в центре площадки. Выбирая далее декартову ортогональную систему координат, по компонентам определенной таким образом силы нетрудно получить компоненты тензора мезонапряжений,
причем последний будет симметричным.
В случае, если корреляция между мезонапряжениями и положением
в единичном сечении существует, тензор мезонапряжений не обязательно
симметричный. В этом случае уравнение баланса момента количества
движения отличается от классического, в рассмотрение необходимо вводить тензор моментных напряжений; иначе говоря, от классического континуума следует переходить к обобщенному (например, континууму Коссера). Заметим, что подобное определение напряжений возможно на различных масштабных уровнях, включая используемый в некоторых
вариантах ФТП так называемый «атомный» (представительный объем
109
атомного уровня можно определить как объем совершенной кристаллической решетки, содержащей 103–106 атомов).
Рассмотрим связь кинематических характеристик мезо- и макроуровней, опираясь на геометрический смысл компонент тензора малых
деформаций (в случае рассмотрения геометрически нелинейных проблем следует использовать аналогичные соотношения для тензора деформации скорости). Будем обозначать через u, ε, σ (U, ε, Σ) мезоскопические (макроскопические) перемещения, деформации и напряжения.
Тогда приращение тензора малых деформаций для «единичного» куба
можно определить следующим образом:
ε
d =
1
( n du + du n ) dS ,
2 ∫S
(4.12)
где n – единичная внешняя нормаль к поверхности «единичного куба»,
S – его поверхность. В случае, если мезоскопические перемещения принимаются непрерывными дифференцируемыми функциями пространственных координат, из (4.12) следует:
dε = ∫ dε dV ,
(4.13)
V
где интегрирование ведется по объему единичного куба. Отметим, что
в случае произвольных («не нормализованных») размеров представительного объема правые части (4.12) и (4.13) следует делить соответственно на S и V.
Следует подчеркнуть, что мезопараметры представляют собой некоторые осредненные величины по подобъемам представительных мезообъемов. Иначе говоря, и на мезоуровне осуществлен переход к континуальному описанию.
Элементарная работа, совершаемая мезонапряжениями в представительном объеме, определяется соотношением:
dA = ∫ σ : dε dV = ∫ n ⋅ σ ⋅ dudS ,
V
(4.14)
S
вторая часть соотношения справедлива в случае непрерывности и дифференцируемости полей мезоперемещений и выполнения на мезоуровне
110
однородного условия равновесия. Заметим, что компоненты мезонапряжений не обязательно должны быть непрерывными на произвольных
поверхностях (например, границах зерен), для выполнения условий равновесия должны быть непрерывны только результирующие распределенные нагрузки на таких поверхностях.
В дополнение к двум предыдущим принимается гипотеза об отсутствии корреляции между распределением любых компонент тензора
мезонапряжений и любыми компонентами вектора мезоперемещений
в любом сечении (для простоты сечения берутся единичной площади).
В модели Бишопа–Хилла осреднение производится по единичной
площади произвольного сечения:
Σ = ∫ σ dS , U = ∫ u dS .
S
(4.15)
S
Из последнего определения с учетом сформулированной выше гипотезы Бишопом и Хиллом доказано следующее соотношение:
dA = ∫ σ : dε dV = Σ : dε .
(4.16)
V
Следует отметить, что доказательство этого соотношения не вызывает затруднений с учетом того, что в модели Бишопа–Хилла принята гипотеза Фойгта; по существу, в этом случае (4.16) сводится к утверждению об
идентичности осреднения тензора напряжений по объему и (4.15)1.
С использованием последнего соотношения может быть доказан
принцип максимума работы для поликристалла на основе принципа
максимума для монокристалла, не прибегая при этом к понятию поверхности текучести поликристалла. Действительно, пусть σ* – мезонапряжения, не нарушающие условия текучести и удовлетворяющие
однородному условию равновесия, Σ* – осредненные напряжения. Тогда
в соответствии с (4.16) и (4.19) имеем:
( Σ – Σ ) : dε = ∫ ( σ – σ ) : dε dV ≥ 0
∗
∗
(4.17)
V
что и требовалось показать.
Аналогично доказывается принцип минимума сдвига для поликристалла. Пусть du и du* – непрерывные с непрерывными первыми
111
производными поля перемещений, удовлетворяющие условию сохранения объема ( ∇ ⋅ du = ∇ ⋅ du* = 0 ), имеющие одинаковые значения на поверхности единичного куба. Полагаем, что du ассоциировано с равномерным распределением мезонапряжений σ, удовлетворяющих условию
текучести. Тогда
∫ σ : dε d V = ∫ σ : d ε
V
∗
dV ,
(4.18)
V
или
Σ : d ε = Σ : dε ∗
(4.19)
При этом справедливы следующие равенства:
∫ σ : dε
V
∫ σ : dε
V
*
k
k
k
k
dV = ∫ ∑ τ( ) dγ( ) dV = ∫ ∑ τ(с ) dγ( ) dV ,
k
k
V
V
k
k *
dV = ∫ ∑ τ( ) dγ( ) dV .
k
V
(4.20)
В силу того, что dγ(k) * – геометрически возможны, но не обязательно физически возможны, в (4.20)2 знаки τ(k) и dγ(k) * могут быть различны, при этом τ ( k ) ≤ τ (ck ) , откуда получаем:
∑k τ( )
k
k*
k
k*
k
k*
dγ( ) ≤ ∑ τ( ) dγ( ) ≤ ∑ τ(с ) dγ( ) . (*)
k
В (4.20)1 знаки τ (k) и dγ (k) совпадают и положительны, на активных
площадках τ ( k ) = τ c( k ) , откуда следует:
∑k τ( )
k
k
k
k
dγ( ) = ∑ τ(с ) dγ( ) .
k
Тогда получаем окончательно:
Σ : dε = ∫ (∑ τ (ck ) dγ ( k ) ) dV ≤ ∫ (∑ τ (ck ) dγ ( k )∗ ) dV . (4.21)
V
112
k
V
k
Полагая критические напряжения сдвига одинаковыми по агрегату, получаем принцип минимума сдвига для поликристалла:
∫∑
V k
k
k*
dγ( ) dV ≤ ∫ ∑ dγ( ) dV .
k
V
(4.22)
Комбинируя (4.17) и (4.21), приходим к следующему соотношению:
(
)
(4.23)
dγ ( k )∗ dV ,
(4.24)
Σ∗ : dε ≤ Σ : dε ≤ ∫ ∑ τ (сk ) dγ ( k )∗ dV.
V
k
Кроме того, справедливо неравенство
Σ : dε∗ ≤
∫ ∑(τ
V
k
(k )
с
)
где dε* соответствует некоторому перемещению dU*. Напомним, что
принципы максимума работы и минимума сдвига являются двойственными [20], и в этом смысле эквивалентны друг другу, один следует из
другого.
Как следует из последних результатов, принцип максимума работы справедлив для агрегата из монокристаллических зерен в предположении, что деформирование в каждом из них осуществляется сдвигом
по определенным системам скольжения. Тогда из ранее сформулированного (без доказательства) утверждения следует, что может быть построен пластический потенциал, совпадающий с функцией текучести.
Но тем самым решается в принципе вопрос об установлении определяющих соотношений (с помощью принципа градиентальности).
Сопоставляя модель Бишопа–Хилла с ранее изложенной моделью
Тейлора, нетрудно убедиться, что концептуальные положения обеих
моделей практически совпадают (а следовательно, модели Бишопа–
Хилла присущи те же недостатки, что и модели Тейлора); модель
Бишопа–Хилла отличается более глубокой «математической оснащенностью». Вероятно, это является причиной того, что в последнее десятилетие модели, имеющие в основе те же гипотезы и положения, что
и модель Тейлора, стали называть моделями «типа Тейлора–Бишопа–
Хилла».
113
Несмотря на отмеченные выше недостатки моделей Тейлора–
Бишопа–Хилла, они являются одними из наиболее широко используемых. В последние 10–15 лет модели этого класса часто применяются
для анализа различных технологических процессов обработки металлов
давлением и других распространенных технологических процессов.
Пример применения модели для исследования процесса механической
обработки (ортогонального резания) монокристаллической заготовки
содержится в работе [85].
Дальнейшее развитие моделей этого класса связано, в частности,
с совершенствованием математической основы моделей, модификацией
соотношений теории для учета поворотов кристаллической решетки.
Например, в работе [98] наряду с трансляционной (сдвиговой) модой
деформирования идеально-пластического монокристалла предлагается
ввести дополнительные параметры, характеризующие ориентацию кристаллической решетки (три угла Эйлера). В качестве ключевой гипотезы
вводится предположение об аддитивном разложении градиента скорости перемещений на пластическую составляющую, определяемую скоростями сдвигов по активным СС, и спин решетки. Одну из известных
трудностей – задание граничных условий для скорости поворота решетки – автор предлагает избежать за счет задания так называемых «глобальных кинематических условий», согласно которым в исследуемом
теле вводятся материальные направления с запрещенными поворотами
(например, вдоль оси растягиваемого образца). Как представляется, указанные гипотезы не имеют достаточного физического обоснования даже
для монокристаллов. Детальное изложение моделей Тейлора, Бишопа–
Хилла и обзор работ по их применению содержатся в статье [101].
ВОПРОСЫ К ГЛАВЕ 4
1. Приведите описание и соотношения модели Закса.
2. Перечислите основные гипотезы модели Тейлора.
3. Опишите основанный на модели Тейлора алгоритм построения
кривой «напряжение – деформация» при одноосном нагружении поликристаллического образца.
4. Сформулируйте задачу линейного программирования, к которой
приводится модель Тейлора, и двойственную к ней задачу.
5. Перечислите основные недостатки модели Тейлора.
114
6. Приведите основные положения и понятия, используемые при
формулировке модели Бишопа–Хилла.
7. Сформулируйте и докажите принцип максимума работы для
монокристалла.
8. Дайте определения геометрически и физически возможных векторов сдвига (скоростей сдвигов).
9. Сформулируйте и докажите принцип минимума сдвига (работы) для
монокристалла, сопоставьте принципы минимума и максимума работы.
10. Какой подход к осреднению применяется в модели Бишопа–
Хилла и на каких гипотезах он основан?
11. Сформулируйте и докажите принципы максимума работы и минимума сдвига для поликристалла.
12. Проведите сопоставление моделей Тейлора и Бишопа–Хилла.
115
ГЛАВА 5. УПРУГОПЛАСТИЧЕСКИЕ МОДЕЛИ
В большинстве работ по физическим теориям пластичности в качестве одного из основных недостатков моделей Тейлора, Бишопа–
Хилла и их модификаций отмечается неучет упругих деформаций.
Т.Г. Линь полагал [21, 124], что упругими деформациями можно пренебречь в случае больших пластических деформаций, что недопустимо
в случае, когда эти составляющие имеют один порядок. Однако подобная ситуация при анализе упругопластического деформирования представляет ограниченный интерес даже в теоретическом плане и весьма
редко встречается в практически важных задачах. Тем не менее включение в рассмотрение упругих деформаций представляется необходимым, исходя из потребности определения остаточных напряжений (второго рода), во многом определяющих прочностные характеристики материала, и накапливаемой упругой энергии. Кроме того, при учете
упругих деформаций снимается предположение о несжимаемости материала, весьма затрудняещее построение определяющих соотношений
[50]. Отметим, что первоначально модель Линя сформулирована для
случая малых деформаций.
Следует отметить, что большинство упругопластических (равно,
как и упруговязкопластических) моделей используют гипотезу аддитивности упругих d e и неупругих din составляющих тензора деформации скорости и (изотропный или анизотропный) закон Гука:
d = d e + din , σ = π : d e = π : ( d – din ) ,
или ОС в так называемой скоростной релаксационной форме ( π – тензор упругих характеристик). Вместо материальной производной тензора
напряжений в геометрически нелинейном случае применяется та или
иная «объективная производная», чаще всего – коротационная. Основное отличие заключается в части конститутивной модели, используемой
для определения неупругой составляющей тензора деформации скорости. Собственно физическая теория строится для представительного
объема макроуровня, состоящего из конечного (но большого, порядка
нескольких сотен или тысяч) кристаллитов (зерен, субзерен).
116
5.1. МОДЕЛЬ ЛИНЯ
Модель Линя [21, 124] базируется на следующих основных гипотезах:
– скорости полных деформаций поликристаллического агрегата
представляются суммой упругих и пластических составляющих:
D = De + D p , D′ = D′e + D′ p ;
(5.1)
– скорости полных деформаций отдельных зерен поликристалла
d (n = 1, 2, …, N, N – число кристаллитов (зерен) в представительном
макрообъеме) равны скоростям полных деформаций поликристаллического агрегата (т.е. для скоростей полных деформаций используется гипотеза Фойгта; заметим, что в ряде работ она называется гипотезой
Тейлора):
(n)
d ( n ) = d = D, d′( n ) = d′ = D′ ;
(5.2)
– пластические деформации являются изохорическими, изменение
объема определяется первым инвариантом упругих деформаций;
– пластические деформации обусловлены сдвигом по кристаллографическим системам скольжения и подчиняются закону Шмида;
– упрочнение изотропно и определяется суммарным сдвигом по
всем активным системам скольжения.
Рассмотрим соотношения для произвольно выбранного зерна (для
упрощения записи ниже индекс номера зерна опущен). При наличии
одной активной системы скольжения k скорость сдвига γ ( k ) в ней связана со скоростью пластической деформацией dp соотношением
d p = m ((S)k ) γ ( k ) ,
∑
.
(5.3)
k
При активизации нескольких систем скольжения девиатор пластической деформации определяется выражением
K
d p = ∑ m ((S)k ) γ ( k ) ,
(5.4)
k =1
где K – число активных систем скольжения.
117
В соответствии с гипотезой 5 критические сдвиговые напряжения в
каждой системе скольжения одинаковы и зависят от суммарного сдвига:
τ (ck ) = τ c = f ∑ ∫ γ ( k ) dt ,
k
(5.5)
или в скоростях
τ (ck ) = τ c = f ′ ∑ ∫ γ ( k ) dt ∑ γ ( k )
k
k
,
(5.6)
где f ′(.) – производная функции f по накопленному сдвигу.
Скорости упругих деформаций в зерне определяются соотношением:
K
d e = d – ∑ m ((S)k ) γ ( k ) .
(5.7)
k =1
В предположении изотропии упругих характеристик (отметим, что
эта гипотеза принята только для упрощения изложения модели, в современных работах при расчетах часто используется анизотропный закон) скорость изменения девиатора напряжений определяется согласно
(изотропного) закону Гука:
s = 2Gd′e ,
(5.8)
скорость изменения шаровой части тензора напряжений (или среднего
напряжения σ ) определяется также согласно закону Гука:
σ = Kd , d =
1
E
I1 (d), K =
.
3
1 – 2ν
(5.9)
Заметим, что в случае исследования процессов с большими градиентами перемещений (т.е. геометрически нелинейных) материальная
производная девиатора напряжений в (5.8) должна быть заменена на
производную, не зависящую от выбора системы отсчета (чаще всего –
коротационную [31]).
Рассмотрим процесс нагружения в пространстве девиаторов деформаций, связь шаровых составляющих тензоров деформаций и на118
пряжений осуществляется согласно (5.9). Для решения (физически
и/или геометрически) нелинейных задач, как правило, необходимо использовать пошаговые процедуры, согласно которым весь интервал нагружения разбивается на ряд малых шагов (приращений нагрузки или
перемещений).
Рассматривается представительный макрообъем поликристаллического агрегата. В начальный момент материал полагается находящимся
в естественной конфигурации, в силу чего все компоненты тензоров напряжений и деформаций равны нулю; ориентации всех СС полагаются
заданными (тем или иным законом распределения). Для представительного макрообъема полагается заданным закон нагружения (т.е. заданы
все компоненты тензора деформации как функции времени (или возрастающего параметра), а следовательно, в каждый момент нагружения известны компоненты тензора деформации скорости).
На первом шаге нагружения материал является упругим; задавая
тензор деформации скорости перемещений в соответствии с (5.8) и учитывая, что de = d, определяется скорость изменения девиатора напряжений. Интегрируя, по последней определяется момент достижения в одной из СС (например, с номером 1) сдвигового напряжения, равного по
модулю начальному критическому напряжению τc0 = f (0). После этого
момента начинается неупругое скольжение по системе 1 при возрастающем девиаторе деформации e (последний определяется интегрированием d). При этом в каждый момент деформирования должно выполняться условие пластического течения:
τ (1) = τ c = f (γ (1) ) ,
или
(1) (1)
(1)
2Gm (1)
(S) : (e – m (S) γ ) = f (γ ) .
(5.10)
При заданном в каждый момент времени е (5.10) представляет собой уравнение для определения γ (1) .
При выполнении (5.10) и возрастающем девиаторе деформации e (в
каждый момент времени определяемого интегрированием d с использованием любой из известных схем) одиночный сдвиг продолжается до тех
пор, пока в некоторой другой системе скольжения (например, 2-й) сдви119
говое напряжение τ(2) не достигнет критического значения τ c = f (γ (1) ) .
Начиная с этого момента, возрастание e вызывает двойственное скольжение по системам 1 и 2, при этом должны выполняться условия:
τ (1) = τ (2) = τ c = f (γ (1) + γ (2) ) ,
или
2
2
k=1
k=1
(k ) (k )
(k ) (k )
2Gm (1)
) = 2Gm (2)
) = f (γ (1) + γ (2) ) ;
(S) : (e - ∑ m (S) γ
(S) : (e – ∑ m (S) γ
(5.11)
(5.11) – система двух алгебраических уравнений для определения γ (1) , γ (2) .
Аналогичным образом рассматривается вовлечение в скольжение
3-й, 4-й и 5-й систем скольжения. При этом на каждой из активных систем скольжения должно выполняться условие текучести. При продолжающемся активном деформировании возможно возникновение ситуации, когда условие текучести выполняется одновременно более чем
в пяти системах скольжения (при использовании закона типа шмидовского для ГЦК-кристаллов это соответствует нахождению ИТН в одной
из вершин, где пересекаются 6 или 8 гиперплоскостей). В этом случае,
опираясь на экспериментально известный факт о некотором превышении латентного упрочнения над деформационным (активным), предпочтение отдают ранее вовлеченным в скольжение системам.
В конкретных расчетах обычно используют систему уравнений типа
(5.11), записанную в приращениях (или в скоростях), например, вида:
K
K
2Gm ((S)i ) : (∆e – ∑ m((S)k ) ∆γ ( k ) ) = f ′(γ Σ ) ∑ ∆γ ( k ) , i = 1, K ,
k=1
k=1
(5.12)
где f ' = df/dγΣ, γ Σ = ∑ ∫ dγ n или γ Σ = ∑ ∫ γ ( j ) dt – накопленный суммарn
j
ный сдвиг по всем активным системам скольжения (в том числе и бывшим активными ранее, в текущий момент деформирования перешедших
в разряд пассивных).
Для перехода к модели поликристалла используется один из известных подходов к осреднению (чаще всего – ориентационное осреднение).
120
5.2. НАПРАВЛЕНИЯ РАЗВИТИЯ
УПРУГОПЛАСТИЧЕСКИХ МОДЕЛЕЙ
Модель Линя по сравнению с ранее рассмотренными обладает тем
преимуществом, что позволяет определять последовательность активации систем скольжения и учитывает упругие деформации. В то же время использование гипотезы Фойгта (об однородности полных деформаций в представительном макрообъеме) приводит к нарушению условий
равновесия на границах зерен. В связи с этим в дальнейшем как Линем,
так и другими исследователями предпринимались и предпринимаются
попытки построения так называемых самосогласованных моделей пластичности поликристаллов, в которых выполняются как условия совместности деформаций, так и условия равновесия на границах зерен [21].
В значительной мере эти исследования опираются на решение Эшелби
[88, 89] задачи об одиночном эллиптическом включении в бесконечной
однородной упругой среде с эффективными характеристиками [21].
В дальнейших исследованиях (Кренер, Хилл) были рассмотрены более
сложные задачи об одиночном включении в упругопластической среде
с эффективными (осредненными) характеристиками. Самосогласованные модели являются эффективным инструментом при анализе «тонких» эффектов; например, в работе [67] такая модель применена для определения остаточных напряжений второго рода и запасаемой внутренней энергии при одноосном растяжении медных (99 %) образцов,
получаемых листовой прокаткой (последовательно горячей и холодной).
Приведены определения остаточных напряжений I, II и III рода, самоуравновешенных соответственно для всего исследуемого тела, для
представительного объема макроуровня и в пределах зерна. Остаточные
напряжения I и II рода и связанная с ними упругая энергия оказывают
существенное влияние на механические свойства материалов и разрушение, тогда как с энергией напряжений III рода авторы связывают
процессы рекристаллизации поликристаллических материалов.
Следует отметить, что модель Линя не снимает полностью вопроса
об единственности определения скоростей (или приращений) сдвигов,
например, при попадании изображающей точки в вершину 6-го или 8-го
порядка многогранника текучести. Детальное исследование указанной
проблемы представлено в [183], где с применением теории неявных
функций получено условие единственности определения скоростей
сдвига в монокристалле для произвольного напряженно-деформирован121
ного состояния и нелинейного неизотропного закона упрочнения. Рассматривается случай малых деформаций, ротациями решетки пренебрегается. Предложен алгоритм определения приращений сдвигов, приведены численные примеры.
В последние 10–15 лет физические упругопластические теории активно применяются для описания процессов глубокого пластического
деформирования, особое внимание при этом уделяется анализу эволюции
микроструктуры, в частности, возникновению и развитию текстуры.
Одна из первых попыток конструктивного применения модели
Линя для анализа поведения поликристаллов при сложном нагружении
освещена в работе [169]. В первой части работы приведены и обсуждаются результаты экспериментов на сложное нагружение тонкостенных
трубчатых латунных образцов. Исследуются траектории в виде двухзвенных ломаных (растяжение – кручение) при различных длинах сегментов ломаных и углах излома от 30 до 180о. Для теоретического исследования использована модель Линя с модифицированным для учета
эффекта Баушингера законом упрочнения. Отмечается, что учет взаимодействия зерен в модели Линя можно рассматривать как упрощенную
модификацию модели Кренера, основанной на решении Эшелби для
сферического кристалла в изотропной матрице. Рассмотрены плоские
траектории деформации, пластические сдвиги осуществляются в одной
плоскости по трем направлениям (6 систем скольжения), образующим
равносторонний треугольник. Описаны алгоритм реализации модели
и полученные результаты; показано хорошее качественное соответствие
расчетных и экспериментальных результатов.
Развитие рассмотренной модели [169] содержится в работах [116,
168], в которых особое внимание уделяется законам упрочнения для СС
и описанию эволюционирующей поверхности текучести. В качестве поверхностей текучести приняты поверхности равных уровней интенсивности пластических деформаций по лучевым траекториям деформаций
из текущих точек полной разгрузки; «допуск» на пластические деформации принимался равным 0,02, 0,05, 0,2, 0,5 и 1,0 %. Приведены основные гипотезы модели Линя; представляет интерес предложенный
авторами закон упрочнения, являющийся модификацией закона Тейлора
(позднее аналогичная модификация рассмотрена Венгом):
(l)
dτ(k)
c = H kl dγ ,
122
(5.13)
(k)
где Hkl = A+B ( τ(k)
cs – τ c ) при Qkl = 1,
(k)
Hkl = A–B (Е τ(k)
cs + τ c ) при Qkl = –1,
Hkl = A при –1<Qkl<+1,
Qkl = (b(k) n(k)):(n(l) b(l)), Е, В – безразмерные параметры, А – материальная
(k)
константа с размерностью напряжений, τ(k)
c , τ cs – текущее критическое
напряжение и так называемое напряжение насыщения k-й СС. Нетрудно
видеть, что в предлагаемом законе учтены различие активного
и латентного упрочнения и разупрочнение при реверсивном нагружении
(за счет аннигиляции дислокаций). Предлагаемый закон упрочнения позволяет описать эффект Баушингера и экспериментально наблюдаемый
факт «скругления» участка кривой реверсивного нагружения перед наступлением вторичной пластической деформации.
Для упрощения осуществлен переход к плоской задаче; для выбранной декартовой ортогональной системы координат Ох1х2х3 принимается, что деформирование осуществляется сдвигом в плоскости Ох1х2
по трем равнонаклоненным направлениям скольжения. В рассмотрение
включены только сдвиговые деформации ε31, ε32 и соответствующие
компоненты сдвиговых напряжений (или девиаторов напряжений) s31,
s32, которым в соответствие ставятся двумерные векторы деформаций
и напряжений.
В расчетах использованы следующие значение параметров:
А = 5,9·102 МПа, В = 2,0·102, Е = 0,5, модуль сдвига G = 29,4 ГПа, начальное критическое напряжение сдвига равно 79,2 МПа, что соответствует латуни.
Рассмотрена эволюция поверхности текучести для случая лучевого нагружения при различных допусках на пластическую деформацию;
показано, что чем больше величина допуска, тем ближе форма поверхности текучести в данном случае двумерного нагружения к окружности.
Сопоставление теоретических результатов с экспериментальными данными показывает хорошее качественное соответствие при всех величинах допуска, количественное соответствие тем лучше, чем больше величина допуска. По сопоставлению с экспериментом возникает вопрос:
эксперименты проводились по растяжению–кручению трубчатых образцов, модель же ориентирована на сдвиг в двух перпендикулярных
123
направлениях. Авторы не поясняют переход от сдвиговых компонент
к реализующимся в эксперименте. Приведены результаты расчетов эволюционирующей поверхности текучести для двух- и трехзвенных ломаных с углами излома 90о. На трехзвенных ломаных показывается справедливость принципа затухающей памяти: на симметричных траекториях деформации получены одинаковые расположение и размеры
поверхностей текучести по отношению к внутренней геометрии траекторий деформации.
Дальнейшее развитие модели Линя связано в значительной мере
с модификацией положенного в его основу закона упругости и с учетом
геометрической нелинейности. Работ по данной теме чрезвычайно много, в связи с чем остановимся только на нескольких из них, содержащих
достаточно полное изложение теории и алгоритмов.
В статье [140] рассматривается геометрически нелинейная модель
термоупругопластичности моно- и поликристаллов. Последовательно
излагаются кинематические соотношения, основанные, как и большинство других моделей геометрически нелинейной пластичности, на мультипликативном разложении Ли градиента места. Кроме того, вводится
разложение градиента места, упругой и пластической составляющих на
шаровую и унимодулярную части. На основе разложения Ли в терминах
промежуточной (разгруженной) конфигурации получено аддитивное
разложение градиента скорости перемещений на упругую и пластическую составляющие.
В качестве соотношений термоупругости принимается закон гиперупругости («неогуковский» изотропный закон), получаемый из неравенства Клаузиуса–Планка. При этом функция свободной энергии
Гельмгольца полагается зависящей от упругой составляющей градиента
места, температуры и скалярной внутренней переменной, характеризующей осредненные поля микродеформаций, обусловленные дефектами кристаллической решетки. В качестве переменной, сопряженной
введенной внутренней переменной, вводится микронапряжение, получено эволюционное уравнение для него.
В части определения пластических деформаций предлагаемая модель не отличается от описанной выше модели Линя, за исключением
учета изменения векторов нормали и направления скольжения кристаллографической СС, при этом преобразование векторов осуществляется
с использованием упругой составляющей градиента места (модель «материального поворота»). В рассматриваемой работе автор ограничился
124
случаем монокристаллического тела, реализация модели для поликристаллов не рассматривается.
Современному изложению физической теории (типа модели Линя)
и некоторым аспектам ее численной реализации посвящена работа
[136]. В качестве кинематической основы используется мультипликативное разложение транспонированного градиента места («градиента
об ο
деформации») f = ∇ r T на упругую f e и пластическую f p составляющие
(заметим, что указанное разложение было введено независимо в работах
[72, 117, 121, 122]):
f = f e ⋅f p.
(5.14)
Следует отметить, что мультипликативное разложение, используемое в физических теориях пластичности и на макро-, и на мезоуровне, по форме совершенно идентично; здесь соотношения приведены
в обозначениях мезоуровня. С обзором применения мультипликативного разложения градиента места для построения широкого круга макрофеноменологических и физических конститутивных моделей можно ознакомиться в [125]; представляет интерес обсуждение физической основы данного разложения, содержащееся в [82]) Следует отметить, что
в ряде работ (см., например, статью [151] и содержащиеся в ней ссылки)
обращается внимание на неоднозначность выбора промежуточной (разгруженной) конфигурации, которая получается из актуальной разгрузкой материальной частицы. С математической точки зрения это очевидно: в (5.14) можно ввести произведение произвольного ортогонального
тензора r на транспонированный к нему
f = f e ⋅ f p ≡ f e ⋅ r T ⋅ r ⋅ f p = (f e ⋅ r T ) ⋅ (r ⋅ f p ) = f e ⋅ f p .
В связи с этим в цитируемой статье предлагается ввести еще одну
фиктивную конфигурацию (так называемую изоклинную конфигурацию), для которой сохраняются неизменными во времени и в пространстве векторы «директоров», в качестве каковых для кристаллитов (зерен, субзерен) могут быть выбраны определенные кристаллографические направления. Разгруженная конфигурация получается трансляцией
и поворотом как жесткого целого изоклиной конфигурации.
125
Из соотношения (5.14) легко получаются уравнения скоростного типа:
об
ˆ v T = d + w = f ⋅ f -1 = f e ⋅ f e-1 + f e ⋅ f p ⋅ f p -1 ⋅ f e-1 =
l=∇
(5.15)
= l +l = ω+w +d +l ,
e
p
e
p
e
где ω – тензор скорости жесткого поворота решетки, ω = r e ⋅ r e T ; w e –
спин, ассоциированный с упругим искажением решетки, которым
в данной работе пренебрегается. Далее принимается, что
l p ≡ f p ⋅ f p -1 =
γ( k )b(0 )n(0 ) ,
∑
k=1
K
l p ≡ f e ⋅ f p ⋅ f p -1 ⋅ f e −1 =
k
k
K
(k ) ( k )
γ
∑
k=1
b n
(5.16)
(k )
= dp + w p,
где К – количество активных СС, b (0k ) ,n (0k ) – единичные векторы направления скольжения и нормали к плоскости скольжения в промежуточной
(разгруженной) конфигурации, b( k ) ,n ( k ) – те же векторы в актуальной
e
(k)
(k)
e
(k)
конфигурации, b(k) = f e ⋅ b(k)
= f e ⋅ n(k)
в предполо0 ≈ r ⋅ b0 , n
0 ≈ r ⋅ n0
жении малых упругих искажений.
Для каждой из систем скольжения используется закон Шмида
в сочетании с комбинированным законом упрочнения:
f ( k ) = τ( k ) – ρ( k ) – τ (ck ) ≥ 0 ,
(5.17)
τ( k ) – сдвиговое напряжение на системе k, τ( k ) = m ((S)k ) : σ ; τ (ck ) , ρ( k ) – характеристики изотропного и кинематического упрочнения; изменение
критического напряжения сдвига определяется соотношением
K
τ(ck ) = ∑ hsk γ( s ) ,
(5.18)
k=1
где hsk – матрица упрочнения, учитывающая активное и латентное упрочнение. В качестве мер напряжений и упругих деформаций использованы соответственно второй тензор Пиола–Кирхгоффа k и тензор
Коши–Грина c (с разгруженной конфигурацией в качестве отсчетной,
126
что в дальнейшем обозначается нижним индексом ×), связанные линейным анизотропным упругим законом (анизотропная гиперупругость) :
k× = π : c× , k× = det(f e )f e -1 ⋅ σ ⋅ f e T , c× =
1 e eT
(f ⋅ f – E) .
2
(5.19)
Обращаясь к процедуре определения активных систем и скоростей
сдвигов, авторы отмечают трудности, возникающие в моделях типа
Тейлора–Бишопа–Хилла, часть из которых освещена выше. В связи
с этим излагается так называемый А–К-метод (Anand–Kothari method)
[62]. В методе используется гипоупругий закон:
σ = π : (d – d p ) ,
(5.20)
где d p = ∑ γ(k) m ((S)k ) sgn ( τ(k) ) . Используя далее закон Шмида в скороK
k=1
стях, соотношение (5.18), два последних соотношения и связь скорости
касательного напряжения со скоростью тензора напряжений Коши
τ(k) = m ((S)k ) : σ , получают систему уравнений относительно скоростей
сдвига. С использованием упругого предиктора определяются системы
скольжения, которые могут быть активными (не более пяти), после чего
для выбранных активных СС решается полученная система уравнений.
В случае, если полученные скорости сдвигов на некоторых из СС отрицательны, эти СС исключаются из числа активных, и для оставшихся
активных СС вновь решается указанная выше система уравнений, из
которой определяются скорости сдвигов. Следует отметить, что в данной части процедура весьма близка к предложенной в модели Линя [21].
После завершения данного этапа окончательно определяются напряжения, для чего применяется соотношение (5.19), что представляется непоследовательным и требует дополнительной проверки выполнения закона Шмида.
Авторами предлагается собственная процедура определения активных систем скольжения и скоростей сдвигов, названная М–М-алгоритмом (McGinty–McDowell), основанная на условии совместности:
изображающая точка в пространстве напряжений (ИТН) должна находиться в течение шага нагружения на грани или ребрах многогранника
текучести. На этапе определения активных систем последние фиксиру127
ются, поворот определяется на этапе пересчета напряжений, в связи
с чем на первом этапе отсутствует различие между коротационной и материальной производной тензора напряжений.
В процедуре предлагается последовательно определять активируемые СС. В начальной точке ИТН находится внутри многогранника
текучести, скорость напряжений определяется соотношением (5.20) при
dp = 0, из условия равенства сдвигового напряжения критическому напряжению определяется приращение времени, соответствующее моменту достижения ИТН первой грани многогранника текучести. В дальнейшем ИТН может перемещаться только вдоль этой грани до достижения следующей грани, процедура определения точки пересечения с ней
аналогична предшествующему этапу: точка пересечения с первой гранью принимается за начальную, из (5.20) определяется скорость напряжений (скорость пластических деформаций определяется скоростью
сдвига по первой СС, процедура определения скорости сдвига описана
ниже), определяется промежуток времени до пересечения со второй
гранью многогранника текучести. Аналогичным образом определяются
3-я, 4-я и 5-я активные СС; при этом в случае наличия более пяти активных СС в вершинах многогранника текучести независимых СС может быть только пять. Отмечается, что определение сразу нескольких
активных СС может привести к ошибке: если направление σ первого
(упругого) шага пересекает вначале первую и затем некоторую k-ю
грань, то после пересечения первой грани направление σ может резко
измениться, и следующая активная СС может оказаться совсем иной, не
совпадающей с k-й.
После определения очередной активной СС устанавливаются скорости сдвига во всех активных СС. Для этого существуют два альтернативных варианта. Наиболее строгим и точным авторы считают использование условия совместности напряжений, определяемых по гиперупругому закону (5.19), в сочетании с неявной схемой интегрирования.
Второй путь – использование гипоупругого закона (5.20) и условия
совместности напряжений, которое можно переписать в следующем виде:
K
∑ h signτ
r
k
k=1
(k )
(r )
(k )
(r )
γ ( k ) = m (S)
signτ ( r ) + m (S)
: π : m (S)
: π : d, r = 1, K . (5.21)
При этом с учетом того, что модули упрочнения на 2–3 порядка
меньше упругих модулей, первым членом под знаком суммы можно
128
пренебречь; в этом случае в силу симметрии матрицы коэффициентов
полученной системы линейных алгебраических уравнений можно использовать, например, схему разложения Холецкого; тогда при неизменности активных СС можно делать только обратный ход на нескольких последовательных шагах нагружения. В случае изотропии упругого
закона соотношение (5.21) не зависит от модулей упругости; отмечается, что при анизотропном законе в соотношении (5.21) остаются только
отношения упругих модулей.
Следующий этап алгоритма – определение напряжений. В случае,
если активными являются пять СС, девиатор напряжений (или его приращение) легко определяются из пяти условий закона Шмида, шаровая
часть тензора напряжений Коши находится из линейной связи со средней
деформацией. Ситуация осложняется, если число активных СС менее пяти. В этом случае авторами предлагается использовать принцип минимума приращения девиатора напряжений (по модулю) при условии выполнения условий совместности по напряжениям. Формулируется функционал, в который условие совместности входит через множители Лагранжа,
приведено решение задачи минимизации. Следует отметить, что обоснование указанного принципа отсутствует; в дальнейшем приведены некоторые соображения о его согласованности с постулатом Друккера. Несмотря на существенное сходство данного алгоритма с моделью Линя,
в этой части М–М-алгоритм существенно отличается от модели Линя,
и, как представляется, это отличие – не в пользу М–М-алгоритма. Действительно, модель Линя позволяет находить приращения тензора напряжений на каждом шаге нагружения непосредственно из закона Гука, без
введения дополнительных предположений.
Поскольку все указанные величины определяются в начальном
положении СС, тогда как последние испытывают при деформировании
повороты, требуется итерационная процедура для установления положения СС на конец шага и уточнения всех искомых величин. Вопрос
о ротации КСК отдельно не обсуждается, но, судя по кратким замечаниям, повороты определяются согласно полностью стесненной модели
Тейлора, т.е. по тензору вихря и антисимметричной части тензора сдвигов (см. п. 3.4). Отмечается, что итерационная процедура сходится
очень быстро, за 2–3 итерации.
Значительная часть работы посвящена сопоставлению результатов
расчетов для монокристаллов и поликристаллов с ГЦК-решеткой (медь)
по А–К-методу и М–М-алгоритму. Рассматриваются несколько законов
129
упрочнения. Отмечается хорошее соответствие результатов для одноосного сжатия и простого сдвига по кривой «эффективное напряжение –
эффективная деформация», числу активных систем скольжения и величине сдвигов в них. Однако М–М-алгоритм оказывается намного более
эффективным, время решения на два порядка меньше, чем при применении А–К-метода. Приведено также сравнение кривых «эффективное
напряжение – эффективная деформация» для одноосного сжатия и простого сдвига поликристаллических медных образцов, полученных
с применением предлагаемого алгоритма и полностью неявного алгоритма, предложенного в работе [84]; соответствие результатов также
является удовлетворительным.
Отдельно рассматривается вопрос о включении в закон упрочнения
остаточных микронапряжений (кинематического упрочнения), приведены
модифицированные с использованием последнего соотношения. Рассмотрены критерии разгрузки и продолжающегося активного нагружения.
Физические теории упругопластичности позволяют не только получать информацию о сдвигах по СС и поворотах кристаллической решетки зерен, но и исследовать формирование и эволюцию дислокационных субструктур; один из вариантов такого типа моделей представлен
в статье [148]. В первой части цитируемой работы приведена вариационная постановка задачи упругопластичности, рассмотрен ее инкрементальный вариант. Предлагаемая формулировка в дальнейшем применена для физической теории упругопластичности; отмечается потеря выпуклости функционала вариационной постановки («псевдоупругого
потенциала») при кинематическом разупрочнении (вследствие вращения решетки) и учете латентного упрочнения. В то же время известные
экспериментальные данные свидетельствуют о существовании в кристаллитах областей, деформируемых одиночным скольжением и отделенных друг от друга тонкими прослойками дислокационных субструктур (плоскими скоплениями, стенками и др.). В предлагаемой модели
переход к локальному одиночному скольжению («пятнистому сдвигу»)
и образование тонкой микроструктуры связывается с потерей выпуклости потенциала вследствие латентного упрочнения.
В работе используется мультипликативное разложение градиента
места, f = f e ⋅ f p ; скорость изменения пластической составляющей f p определяется скоростями сдвигов по СС. Следуя [146], вводится тензор
ο
плотности дислокаций p , который определяется через f p , p = f p × ∇ ,
130
который в конечном итоге выражается через сдвиги по СС. Кристаллит
далее рассматривается как совокупность областей однородно деформируемого материала (пластическое деформирование реализуется однородным одиночным сдвигом), отделенных тонкими прослойками – границами. В границах упругая и пластическая составляющая градиента места
терпит разрыв, градиент места f удовлетворяет условиям совместности в
слабом смысле (почти всюду, кроме прослоек, где градиент места может
испытывать разрыв по сдвигам вдоль границы). По величине разрыва
пластической составляющей градиента места с помощью приведенного
выше соотношения устанавливается плотность дислокаций в прослойке;
таким образом, граница представляется дипольной стенкой дислокаций,
принадлежащих двум СС по обе стороны от прослойки.
Предусматривается возможность образования многоуровневых
границ–прослоек, для чего используется модель бинарного дерева (ветвящегося графа, из каждого узла исходят либо 2, либо 0 ветвей; градиент места в узлах равен среднему градиентов места, приписанных ветвям; на нулевом уровне («корне») градиент места равен среднему для
кристаллита). Наличие многоуровневых прослоек, в которых допускается сдвиг, позволяет при их достаточном количестве обеспечить любую
предписанную деформацию за счет одиночных сдвигов. Приведены
примеры определения различно ориентированных границ в ГЦК-кристаллах, которые согласуются с экспериментально наблюдаемыми субструктурами при различных видах нагружения. В заключительной части
статьи приведен способ внесения в модель абсолютных масштабов тонкой структуры, основанный на введении в полную энергию аддитивной
добавки от собственной энергии дислокаций; приведены примеры вычисления размеров ячеек дислокационных субструктур, результаты находятся в хорошем качественном и количественном соответствии с экспериментальными данными.
В статье [115] рассматривается упругопластическая модель для
описания деформирования материалов с ГПУ-решеткой, где наряду со
сдвиговой модой деформирования учитывается двойникование. Используется мультипликативное разложение градиента места, повороты решетки описываются ортогональным тензором, входящим в полярное
разложение упругой составляющей градиента места. В отличие от
большинства работ, в которых оперируют дискретными наборами ориентаций решеток монокристаллов (зерен), образующих поликристаллический агрегат, в работе используется континуальное представление
131
функции распределения ориентаций (ФРО), для которой формулируется
эволюционное уравнение балансового типа.
Модель применена для расчетов кривых «интенсивность напряжений – интенсивность деформаций» и эволюции ФРО при стесненной
осадке и простом сдвиге титановых образцов и свободной осадке магниевого сплава. Результаты расчетов находятся в удовлетворительном
соответствии с экспериментальными данными и результатами расчетов,
полученных с использованием других моделей (работающих с дискретными наборами ориентаций).
Значительное внимание в последние годы уделяется субмикроскопическим и нанокристаллическим материалам, получаемым методами
интенсивной пластической деформации и порошковой металлургии и обладающими уникальными физико-механическими свойствами. В связи
с этим возникает потребность в моделях, учитывающих размеры зерен
и зернограничную фазу. В [155] рассматривается самосогласованная упругопластическая модель, согласно которой зерна поликристалла описываются сферическими кристаллитами произвольной ориентации, окруженными аморфными областями – границами зерен. Размеры зерен полагаются случайными величинами с логнормальным законом распределения.
Приведен вывод разрешающих соотношений для каждой из фаз. Модель
применена для исследования напряженно-деформированного состояния
при растяжении поликристаллических медных образцов со средним размером зерна 20 мкм, 110 нм и 49 нм. Детально исследуется влияние среднего размера зерна и дисперсии на напряжение течения, неоднородность
пластических деформаций и напряжений.
ВОПРОСЫ К ГЛАВЕ 5
1. Какие соотношения применяются в качестве определяющих
в большинстве физических теорий?
2. Приведите и проанализируйте основные гипотезы модели Линя.
3. Приведите кинематические и определяющие соотношения для
кристаллита, применяемые в модели Линя.
4. Изложите алгоритм применения модели Линя для исследования
упругопластического деформирования поликристаллического представительного макрообъема.
5. Перечислите достоинства и недостатки модели Линя.
132
6. Какие физические модели применяются для удовлетворения
условий равновесия на границах кристаллитов?
7. Каким образом модифицируется закон Гука в случае геометрически нелинейных задач?
8. Проанализируйте закон упрочнения, используемый в работах
Токуды и Краточвила.
9. Используя мультипликативное разложение градиента места,
получите аддитивное разложение градиента скорости перемещений на
упругую и пластическую составляющие.
10. Запишите определяющие соотношения гипоупругости и гиперупругости.
133
ГЛАВА 6. ВЯЗКОУПРУГИЕ
И ВЯЗКОПЛАСТИЧЕСКИЕ МОДЕЛИ
Наряду с жесткопластическими и упругопластическими моделями
физической теории пластичности интенсивно разрабатываются и вязкопластические (вязкоупругие) модели (т.е. модели, в которые явным образом входит физическое время), роль которых особенно велика при
рассмотрении процессов неупругого деформирования при повышенных
температурах и медленных нагружениях, поскольку, как известно, движение дислокаций (особенно неконсервативное) является термически
активируемым, связанным с диффузионными процессами.
Основным вопросом построения вязких моделей является выбор
определяющего соотношения для скоростей сдвигов по СС, которое
в таких моделях записывается явным образом. Среди множества таких
определяющих соотношений выделим широко используемый (см., например, [63, 64, 105, 145, 149]) степенной закон (часто в литературе называемый соотношением Хатчинсона):
n
τ(k)
γ = γ (τ ) = γ0 (k) sign(τ(k) ) ,
τc
(k)
ˆ (k)
(k)
(6.1)
где τ(k)
c – критическое напряжение сдвига на k-й СС; следует отметить,
что в вязкоупругих и вязкопластических моделях удвоение числа СС не
используется, направление скольжения определяется знаком сдвигового
напряжения. Следует отметить, что при стремлении n→∞ соотношение
(6.1) приближается к жесткопластическому закону; детально вопрос об
эквивалентности вязкопластической и жесткопластической моделей исследован в работах [62, 144].
Следует отметить, что модели, построенные на соотношении (6.1)
нельзя в полной мере отнести к пластическим, поскольку в (6.1) явным
образом отсутствует пороговость, характерная для пластических моделей. Поэтому модели, построенные на (6.1) принято называть вязкоупругими, для перехода к вязкопластическим моделям соотношение необходимо модифицировать, например, введя в него функцию Хэвисайда:
134
n
(
)
τ(k)
γ = γˆ (k) (τ(k) ) = γ0 (k) sign(τ(k) ) Н τ(k) − τ(k)
.
c
τc
(k)
(6.2)
Кроме того, следует отметить, что в вязкоупругих моделях не имеет смысла вводить понятие активности системы скольжения, так как при
любых положительных касательных напряжениях соотношение Хатчинсона будет давать ненулевую скорость сдвига, поэтому при анализе
поведения материалов на мезоуровне для вязкоупругих моделей рассматриваются накопленные сдвиги на всех потенциально возможных
СС и оценивается в каждый момент деформирования относительная
скорость сдвигов на различных СС. При этом и критическое напряжение сдвига τ (ck ) изменяет свой первоначальный смысл, который оно
имело в жесткопластических и упругопластических моделях как касательное напряжение начала скольжения; оно выступает теперь в роли
материальной функции процесса, определение которой при идентификации модели следует осуществлять в совокупности с установлением
других параметров вязкоупругого закона – γ 0 и п. Однако физический
смысл τ (ck ) как сопротивления движению дислокаций при этом сохраняется, что позволяет относительно независимо от других параметров модели формулировать для него законы упрочнения.
Весьма противоречивые данные приводятся в литературе для параметра γ 0 , значения которого по различным источникам отличаются
на 4–5 порядков. С детальным анализом влияния параметра γ 0 на поведение модели можно ознакомиться в работе [59], где рассмотрены характерные особенности вязкопластического соотношения для определения скоростей сдвигов. В соответствии с двухуровневой физической
моделью ГЦК-поликристалла [48] рассмотрен представительный объем
поликристаллического тела с равномерным случайным распределением
ориентаций кристаллических решеток отдельных зерен, испытывающий
деформацию одноосного сжатия вдоль одной из осей неподвижной лабораторной системы координат; параметры материала соответствуют
чистой меди. Упрочнение и развороты зерен в статье не рассматриваются. В качестве определяющего соотношения для скоростей сдвигов
в отдельных зернах выбрано соотношение (6.2). Выделен параметр µ ,
связывающий характерную скорость деформирования (в процессе с постоянной скоростью деформации) и скорость сдвига в СС при достиже135
нии критического касательного напряжения: γ 0 = µε , выявлены характерные зависимости от данного параметра характеристик напряженнодеформированного состояния. Показано, что характер диссипации энергии пластическими сдвигами зависит от значения µ , точнее: при µ > 1
скольжение сдвигом характеризуется меньшим набором активных систем скольжения и большими скоростями сдвигов, при µ < 1 – большим
количеством активных СС и меньшими скоростями сдвигов в них. Также показано, что суммарная скорость сдвига по всем СС не зависит от
данного параметра, а зависит от скорости деформирования. Выявлена
обратная зависимость предела текучести от µ , однако при значениях
µ > 1 предел текучести одинаков и модель по сути становится упругопластической.
Остановимся на одной из самых простых моделей вязкого типа
[60]. В качестве закона течения принят типовой закон (6.1); как уже отмечалось выше, этот закон применяется чрезвычайно часто, основные
отличия теорий вязкого типа состоят в принимаемых законах упрочнения, учете (или неучете) влияния температуры, вводимых в рассмотрение механизмов деформирования. В цитируемой работе применен ани(l)
зотропный закон упрочнения τ(k)
c = ∑ hkl γ ∂ , где hkl – матрица модулей
k
упрочнения, которую следуя [110] для ГЦК-кристаллов предлагается
принять в виде:
τ(k)
hkl = g kl h0 1 – c
τ s
a
(Σ),
k
(6.3)
где h0, τs, а – материальные параметры, определяющие скорость упрочнения (τs – так называемое напряжение насыщения), принятые постоянными для всех СС. Матрица g kl для ГЦК-кристаллов (12 СС) представляется в блочной форме:
A q A qA q A
qA A qA qA
,
[ g kl ] =
qA qA A qA
qA qA qA A
136
(6.4)
где А – матрицы размерностью 3×3, все компоненты которой равны 1,
q – характеризует отношение скорости латентного и деформационного
упрочнения. Тензор пластической составляющей градиента скорости
перемещений выражается классическим соотношением:
l p = ∑ γ k ( m (( kS )) + m (( kА)) ) ,
(6.5)
k
где m (( kS )) и m (( kА)) – соответственно симметричная и несимметричная части фактора Шмида,
m (( kS )) =
1 (k ) (k )
1
b n + n ( k )b ( k ) ) , m (( kА)) = ( b ( k )n ( k ) − n ( k )b ( k ) ) .
(
2
2
Тогда тензор пластической составляющей градиента скорости перемещений можно представить в виде суммы скорости неупругой деформации d p = ∑ γ ( k )m (( kS )) и тензора «пластического спина» ω p = ∑ γ ( k )m ((Аk )) .
k
k
В силу того, что упругими и термическими деформациями пренебрегают,
определяющее соотношение для описания вязкопластического поведения
материала принимает вид:
γ τ( k )
d ≈ d = ∑ ( k0) ( k )
k τc τc
n −1
p
(m
(k )
(S)
m ((S)k ) ) : s ≡ p ( s ) : s ,
(6.6)
где p ( s ) – так называемый тензор вязкопластических свойств (4-го ранга), s – девиатор тензора напряжений Коши. Показывается, что в случае 5
активных систем скольжения тензор p ( s ) обратим, тогда можно разрешить (6.6) относительно напряжений:
s = p −1 : d .
(6.7)
В силу пренебрежения в рассматриваемой работе упругими деформациями упругая составляющая градиента места равна ортогональному тензору, f e = r e , который полагается ответственным за повороты
кристаллической решетки. Данная модель в цитируемой работе используется в сочетании с самосогласованной схемой, однако использовать ее
можно и в рамках статистического подхода.
137
Более сложная модификация модели вязкого типа рассмотрена
в работе [113], в которой учтено влияние температуры, базирующееся
на континуальной модели «механического порогового напряжения»
(MTS – mechanical threshold stress), предложенной Фоллансби и Куксом
[93]. Последняя представляет собой изотропную «скалярную» модель
для предсказания напряжения течения в зависимости от скорости деформации, температуры и текущего состояния, описываемого параметром состояния, называемым механическим порогом. В первой части работы рассматривается так называемая «стандартная вязкопластическая
модель Тейлора» (standard rate dependent Taylor model). В ней используется «жесткопластическое» мультипликативное разложение градиента
места f:
об o
f = ∇ rT = r ⋅ f p ,
det(r ) =1, det(f p ) =1 .
(6.8)
Составляющая f p переводит отсчетную конфигурацию К0 в про×
межуточную K t при отсутствии поворота (ориентация кристаллической
×
решетки остается неизменной), а ротация r переводит K t в актуальную
конфигурацию Кt. Тогда (транспонированный) градиент скорости перемещений l (в актуальной конфигурации) определяется соотношением:
об
ˆ v T = r ⋅ r T + r ⋅ f p ⋅ (f p )-1 ⋅ r T .
l=∇
(6.9)
об ×
Заметим, что l p = ∇ v T = f p ⋅ (f p ) –1 – «пластический» градиент скорости перемещений, связанный со скоростями сдвигов по системам
скольжения (СС) соотношением:
lp =
где γ
(k )
K
γ( k )b0( k )n0( k ) ,
∑
k =1
(6.10)
– скорость сдвига по k-й СС, b (0k ) – единичный вектор направле-
ния скольжения (сонаправленный вектору Бюргерса), n (0k ) – единичный
вектор нормали k-й СС, определенный в промежуточной (или, что то же
самое, в отсчетной) конфигурации. Вводится аддитивное разложение
градиента скорости перемещений:
138
l = d + w, d = 1
(
)
(
)
T
T
1
,
2 l+l , w = 2 l –l
(6.11)
при этом с учетом (6.9)–(6.10) имеем:
K
K
k =1
k =1
k)
(k ) (k )
T
T
T
d = r ∑ γ ( k )m ((S)0
⋅ r , w = r ⋅ r + r ⋅ ∑ γ m (A)0 ⋅ r , (6.12)
b ( k )n ( k ) + n (0k )b (0k ) ) , m ((Аk ))0 = 1 ( b 0( k )n 0( k ) – n 0( k )b 0( k ) ) . Тензор
2( 0 0
2
ротации решетки определяется решением уравнения
где
k)
m ((S)0
=1
r = w ⋅ r + r ⋅a ,
K
k =1
k)
a = – ∑ γ ( k )m((А)0
.
(6.13)
Таким образом, ротация решетки складывается из «материального
вращения» (w) и ротации от «стесненного сдвига» (a). Используя далее
симметричный ориентационный тензор в актуальной конфигурации
k)
m ((S)k ) ( m ((S)k ) = 1 ( b ( k )n ( k ) + n ( k )b ( k ) ) = r ⋅ m ((S)0
⋅ r T ), сдвиговое напряжение
2
в k-й СС устанавливается следующим образом:
τ( k ) = m ((S)k ) :σ = m ((S)k ) :s ,
(6.14)
где σ, s – тензор напряжений Коши и его девиатор (мезоровня).
Подставляя (6.11) в (6.12)1, девиатор напряжений может быть определен решением следующей системы нелинейных уравнений:
d = p : s,
(6.15)
где четырехвалентный тензор вязкопластических свойств определяется
соотношением
γ τ( k )
p = ∑ ( k0) ( k )
τc
k=1 τ c
K
n-1
(k )
m ((S)k )m (S)
,
(6.16)
т.е. идентичен использованному в соотношении (6.6). Следует подчеркнуть, что из определения тензора свойств p очевидна нелинейность соотношения (6.15), поскольку τ (k ) определяется по искомому тензору s.
139
Принимается закон изотропного упрочнения, эволюционное уравнение для критического напряжения имеет вид закона Воуса (Voce):
K
τc − τ0c K (k )
dτc dτ(k)
(k )
c
≡
= h∑ γ = h0 1 −
∑ γ ,
dt
dt
k=1
τsc − τ0c k=1
(6.17)
где h0 – начальная скорость упрочнения, τ 0c , τ sc – начальное напряжение течения и напряжение насыщения соответственно. Макроскопический девиатор напряжений определяется осреднением с весами
по всем зернам.
Отмечается, что степенной закон (6.1) может рассматриваться
лишь как приближенный закон, не имеющий под собой должного физического обоснования. В связи с этим в работе предлагается модифицировать указанный закон для учета скорости деформации в широком
диапазоне ее варьирования и влияния температуры. В основу указанной
модификация положена упомянутая выше модель механического порогового напряжения.
Подробно описывается численная процедура; для интегрирования
по времени используется неявная разностная схема, система нелинейных уравнений решается методом Ньютона–Рафсона. Для установления
шага по времени решена задача на одноосное сжатие при 10, 20, 40
и 100 постоянных шагах по времени; различие между результатами расчета напряжения сжатия при 10 и 100 шагах не превысило 0,24 %.
Верификация предлагаемой модели осуществляется сопоставлением полученных с ее помощью результатов расчета напряжений с результатами стандартной изотропной модели MTS. Скоростная и температурная зависимости определялись в опытах на сжатие алюминиевого
сплава Al 5182 при температурах 200 и 300 оС при скоростях деформации 0,001 и 1,0 с–1. Показано очень хорошее соответствие результатов.
Анализ предсказания моделью формирования текстуры осуществлен
сопоставлением с результатами, полученными Kalidindi e.a. с использованием модели Тейлора; отмечается хорошее качественное соответствие
результатов.
В работе [141] также используется мультипликативное разложение
градиента места. Упругими деформациями пренебрегается, в силу чего
упругая составляющая градиента места описывает только поворот кристаллической решетки, f e = r l . Получено аддитивное разложение градиента скорости перемещений l в промежуточной конфигурации:
140
l = d + w = d + wl + w p ,
k ) (k )
где d ≡ d p = ∑ m ((S)0
γ , wl = ( r l
K
k=1
причем тензоры m
(k )
(S)0
и m
(k )
(А)0
)
–1
K
⋅ r l – спин решетки, w p = ∑ m ((Аk ))0 γ ( k ) ,
k=1
(симметричная и антисимметричная час-
ти ориентационного тензора) определены также в промежуточной
конфигурации. Используется гипотеза Фойгта, т.е. деформации скорости принимаются одинаковыми в каждый момент времени во всех зернах поликристалла. Скорости сдвигов на СС определяются степенным
законом вида (6.2).
Следует отметить, что хотя в вязкопластических моделях активными в каждый момент времени могут быть любые из возможных для
данного типа кристалла СС, не все они будут линейно независимы; например, на каждой кристаллографической плоскости линейно независимыми могут быть только две из трех СС. В работе предлагается эвристическая, чисто геометрическая процедура определения активных СС,
число которых на каждой плоскости не более двух; например, для ГЦКкристаллов общее число активных СС, таким образом, не превышает
восьми. При определении скоростей сдвигов на СС используется принцип минимума сдвига, решается соответствующая задача оптимизации;
K
k ) (k )
γ вносится с использованием
кинематическое ограничение d = ∑ m ((S)0
k=1
множителей Лагранжа.
С использованием предлагаемой модели решены тестовые задачи
одноосной осадки и простого сдвига монокристаллов с различной начальной ориентацией, одноосной осадки, осадки в условиях плоскодеформированного состояния и простого сдвига поликристаллических
образцов. Сопоставление результатов расчета эволюции ориентаций
кристаллитов с теоретическими результатами, полученными с использованием других моделей, и экспериментальными данными обнаруживает хорошее соответствие.
Представляется целесообразным упомянуть работу [69], содержащую значительное количество экспериментальных данных по лучевым
и двухзвенным траекториям деформации листового алюминиевого
сплава, пригодных для идентификации и верификации теоретических
моделей. Подробно описана методика экспериментальных исследований, включающих как чисто механические измерения, так и анализ тек141
стуры и дислокационных субструктур. Теоретические исследования
проведены с использованием вязкопластических моделей со степенным
законом, «полностью стесненной» и самосогласованной. Обе модели
дают близкие результаты как по зависимостям напряжений от работы на
пластических деформаций, так и по полюсным фигурам; отмечается,
что полюсные фигуры в теоретических расчетах получаются более четко выраженными («острыми»), чем в экспериментах.
Вопросы к главе 6
1. В чем состоит основное отличие вязкоупругих и вязкопластических моделей?
2. Предложите модификации соотношения (6.2) для учета влияния
температуры.
3. Как изменятся соотношения (6.1) и (6.2) при удвоении систем
скольжения (то есть при переходе к положительным сдвигам)?
4. Приведите физическое объяснение закона упрочнения (6.3)–(6.4).
5. Является ли система уравнений (6.6) однозначно
разрешимой? Каковы критерии ее разрешимости относительно s?
6. Приведите выражение тензора р в (6.6) для случая одноосного
напряженного состояния и одиночного скольжения по СС ГЦК-решетки
(ориентацию решетки по отношению к оси нагружения выбрать
самостоятельно), определите обратный тензор р–1.
7. Получите самостоятельно выражение (6.9).
8. Запишите математическую постановку задачи оптимизации для
K
k ) (k )
модели [141] с учетом ограничения типа равенства d = ∑ m ((S)0
γ . Что
k=1
можно сказать о единственности ее решения?
9. Как описывается ротация кристаллической решетки в рассматриваемых моделях?
142
ГЛАВА 7. УПРУГОВЯЗКОПЛАСТИЧЕСКИЕ МОДЕЛИ
7.1. АНАЛИЗ УПРУГОВЯЗКОПЛАСТИЧЕСКИХ МОДЕЛЕЙ
Обзор работ по физическим теориям пластичности, вязко- и упруговязкопластичности, выполненных до 1985 года, содержится в статье
[64]. В ней подробно рассматривается конститутивная модель неупругого деформирования ГЦК поликристаллического агрегата при больших
градиентах перемещений. Поскольку данная статья является одной из
основополагающих и весьма часто цитируемых работ по ФТП, представляется целесообразным ее детальное рассмотрение. Предлагаемая
модель является двухуровневой. Элементом макроуровня является поликристалл, мезоуровня – кристаллит (зерно), способный неупруго деформироваться скольжением краевых дислокаций. Связь низшего масштабного уровня с верхним осуществляется осреднением. Как отмечают
авторы, модель пригодна для определения текстуры материала и напряженно-деформированного состояния при различных историях нагружения зерен ГЦК-агрегата.
Одной из важных особенностей модели является выбор физически
обоснованных законов упрочнения, основанных на экспериментальных
данных. В модели описывается деформационное и латентное упрочнение,
используются чувствительные к скорости деформирования уравнения состояния и соответствующие параметры материала. Основой предлагаемой
модели является конститутивная упругопластическая модель Тейлора–
Бишопа–Хилла. В работе предложен ряд модификаций, позволяющий,
в частности, решить проблему выбора неединственности активных СС.
Модель мезоуровня
Описание пластического течения, как и многих других моделей
ФТП, основывается на работах [164–166]. Некоторые конститутивные
соотношения, используемые в данной работе, можно найти в [65, 103].
Зерно деформируется упруговязкопластически, механизмом неупругого
деформирования мезоуровня является движение краевых дислокаций.
Градиент деформаций (транспонированный градиент места) f записывается с помощью соотношения Ли [121]:
143
f = f e ⋅ f in ,
(7.1)
x
где f in = ei ei описывает скольжение дислокаций по кристаллографическим СС и связывает отсчетную конфигурацию K0 с разгруженной Kx,
x
f e = eˆ i ei – характеризует упругое деформирование и переводит промежуточную конфигурацию Kx в текущую Kt. Выше использованы обо
значения основного (взаимного) лагранжева базиса в отсчетной ei ei ,
x
x
промежуточной ei ei и текущей eˆ i ( eˆ i ) конфигурациях.
Каждая k-я система скольжения определяется направлением сдви(k)
(k).
o (k )
o (k )
га b и нормалью плоскости скольжения n Векторы b и n являются ортонормированными в недеформированной решетке (в отсчетной
и промежуточной конфигурациях), в деформированной решетке (в текущей конфигурации) в анализируемой статье эти направления описываются соотношением:
o (k )
o (k )
bˆ ( k ) = f e ⋅ b , nˆ ( k ) = n ⋅ f e −1 .
(7.2)
Нетрудно проверить, что в текущей конфигурации векторы
bˆ ( k ) , nˆ ( k ) также ортогональны. В статье не обсуждается происхождение
второго соотношения; вообще-то, вектор нормали преобразуется при переходе от отсчетной к актуальной конфигурации совершенно аналогично соo (k )
o (k )
отношению для вектора направления скольжения: nˆ ( k ) = f e ⋅ n = n ⋅ f e T .
Вероятно, авторы неявно принимают, что тензор упругих искажений в
разложении упругой составляющей градиента места f e близок к ортогональному тензору (т.е. упругими искажениями пренебрегается); в этом
случае f e −1 ≈ f eT , векторы bˆ ( k ) , nˆ ( k ) являются единичными.
Используя мультипликативное разложение градиента деформации (7.1), можно определить градиент скорости перемещений l:
l = f ⋅ f −1 = f e ⋅ f e −1 + f e ⋅ f in ⋅ f − in ⋅ f e −1 = l e + l in ,
144
(7.3)
где le и lin – упругая и неупругая составляющие градиентов скоростей перемещений в текущей конфигурации. Полагая, что пластическая деформация осуществляется сдвигами по известным СС, используя (7.3) и разложение lin на симметричную din и антисимметричную части win, записывается неупругая составляющая градиентов скоростей перемещения lin:
l in = f ⋅ f −1 − f e ⋅ f e −1 = din + w in = ∑ γ ( k )bˆ ( k )nˆ ( k )
(7.4)
k
где γ
(k )
– скорость сдвига по k-й CC, din – пластическая составляющая
тензора деформации скорости, win – пластическая составляющая тензора
вихря. Для каждой k-й СС вводятся в рассмотрение симметричные и антисимметричные тензоры:
m ((S)k ) =
(
)
1 ˆ (k ) (k )
b nˆ + nˆ ( k )bˆ ( k ) ,
2
(
)
1 ˆ (k ) (k )
b nˆ − nˆ ( k )bˆ ( k ) .
2
k)
m ((A)
=
(7.5)
Тогда din и win можно записать в виде
d in = ∑ γ ( k )m ((S)k ) ,
k)
w in = ∑ γ ( k )m ((А)
.
k
(7.6)
k
Далее авторы, используя (7.3), раскладывают соответствующие
составляющие на симметричную и антисимметричные части:
d = d e + din ,
w = w e + w in .
(7.7)
Для дальнейшего рассмотрения кинематики деформирования вводится аналог тензора Коши–Грина, определенный в терминах разгруженной конфигурации ε x . Напомним, что тензор Коши–Грина опредеe
ляется в отсчетной конфигурации K0 [31]:
ε=
1 T
(f ⋅ f − I ) ,
2
(7.8)
где I – единичный тензор; тензор ε x определяется следующим образом:
e
ε ex =
1 eT e
(f ⋅ f − I ) .
2
(7.9)
145
Найдем связь этого тензора с упругой составляющей тензора деформации скорости de:
de =
(
)
1 e e −1 e −T e T
f ⋅f + f ⋅f .
2
(7.10)
Для этого продифференцируем соотношение (7.9) и полученное
выражение слева скалярно умножим на fe–T, справа – на fe–1.
f e −T ⋅ ε ex ⋅ f e −1 = f e −T ⋅
(
)
1 e T e e T e e −1
f ⋅f + f ⋅f ⋅f =
2
(
)
(7.11)
ε ex = f e T ⋅ d e ⋅ f e .
(7.12)
1 e −T e T e e −1 e −T e T e e −1
f ⋅f ⋅f ⋅f + f ⋅f ⋅f ⋅f
=
2
1
= f e −T ⋅ f e T + f e ⋅ f e −1 = d e .
2
=
(
)
Отсюда следует связь тензоров ε ex и de:
d e = f e −T ⋅ ε ex ⋅ f e −1 ,
Рассмотрим связь тензора скорости деформаций Коши–Грина ε
и скорости упругого тензора Коши–Грина в разгруженной конфигурации ε ex . Продифференцируем соотношение (7.8) и используем мультипликативное разложение градиента деформаций f = f e ⋅ f in :
(
)
(
)
(
)
1 T
1
1
f ⋅ f + f T ⋅ f = f in T ⋅ f e T + f in T ⋅ f e T ⋅ f e ⋅ f in + f in T ⋅ f e T ⋅ f e ⋅ f in + f e ⋅ f in =
2
2
2
1
1
= f in T ⋅ f e T ⋅ f e + f e T ⋅ f e ⋅ f in + f in T ⋅ f e T ⋅ f e ⋅ f in + f in T ⋅ f e T ⋅ f e ⋅ f in =
2
2
1
= f in T ⋅ εex ⋅ f in + f in T ⋅ ( f e T ⋅ f e − I + I ) ⋅ f in + f in T ⋅ ( f e T ⋅ f e − I + I ) ⋅ f in =
( 7.13)
2
1
= f in T ⋅ εex ⋅ f in + f in T ⋅ ( 2εex + I ) ⋅ f in + f in T ⋅ ( 2εex + I ) ⋅ f in =
2
1
= f in T ⋅ εex ⋅ f in + f in T ⋅ εex ⋅ f in + f in T ⋅ εex ⋅ f in + f in T ⋅ f in + f in T ⋅ f in =
2
in T
e
in
in T
e
in
in T
e
in
= f ⋅ ε x ⋅ f + f ⋅ ε x ⋅ f + f ⋅ ε x ⋅ f + εin0 ,
ε=
(
)
(
)
(
)
(
)
(
146
)
где ε in0 обозначена скорость неупругого тензора Коши–Грина в отсчет1 in T in
( f ⋅ f − I ) ).
2
Целью дальнейших выкладок является получение ОС упругопластического тела. Для этого вводится в рассмотрение (упругий) потенциал, устанавливается его физический смысл; далее с помощью последнего определяется вид искомого ОС в скоростной форме.
Напомним, что существует определение упругих материалов, опирающиеся на понятие потенциала. Такие материалы называются упругими по Грину или гиперупругими. Для определения потенциала вводится
элементарная работа внешних массовых и поверхностных сил [31]:
ной конфигурации K0 ( ε in0 =
δ′A = ∫ ρˆ fˆ ⋅ δrdVˆ + ∫ tˆ ⋅ δrdSˆ ,
Vˆ
(7.14)
Sˆ
где δr – виртуальное (возможное) перемещение, δ'A – элементарная работа (δ' свидетельствует о том, что речь идет не о вариации работы, а о работе на виртуальных перемещениях). Используя соотношение Коши,
теорему Гаусса–Остроградского и уравнение движения сплошной среды,
можно показать, что в случае квазистатического нагружения
(
ˆ δr
δ′A = ∫ σ : ∇
Vˆ
)
T
T
dVˆ = ∫ k I : ∇ δr d V ,
V
где k I – I-й тензор Пиолы–Кирхгоффа, σ – тензор напряжений Коши.
T
Вводя обозначение δ′a = k I : ∇ δr для элементарной работы на еди
ницу объема в K0, можно записать:
δ′A = ∫ δ′ad V .
(7.15)
V
Введенное определение дополняется требованием существования
потенциала ϕ – функции некоторой меры деформации, удовлетворяющей условию
δ′φ = δ′a ,
(7.16)
147
где δ′φ – вариация потенциала. Величина ϕ характеризует запасенную
в результате деформирования упругую энергию на единицу объема
в K0 [31]. Потенциальная энергия тела определяется интегрированием ϕ
по объему тела.
Напомним определение производной Ft скалярно-значной функции F тензорного аргумента A, который в свою очередь зависит от скалярной переменной t:
dF ( A ( t ) )
dt
=
∂F
: AT .
∂A
(7.17)
В дальнейших выкладках понадобится цепное правило для тензоров второго ранга, которое определяется соотношениями:
(А·B):C = (А·B·C):I = (B·C·А):I = (B·C):А = (C·А):B.
(7.18)
В работе принимается, что упругость кристалла не зависит от
скольжения и определяется удельной энергией упругой деформации ϕ.
Скорость работы напряжений в единице объема зерна определяется соотношением
k : d = k : d e + k : din = k : d e + ∑ τ ( k ) γ ,
(k )
(7.19)
k
где k – взвешенный тензор Кирхгоффа, равный тензору Коши σ, умноженному на det (f), τ ( k ) – сдвиговые напряжения по k-й СС,
(k )
τ ( k ) = k : m (S)
. Преобразуем (7.19), используя тензор скорости упругих
деформаций Коши–Грина, определенный в разгруженной конфигурации
ε ex [103], соотношения (7.12) 1 и (7.18):
k : d = k : d e + k : din = ( f e −1 ⋅ k ⋅ f e −T ) : ε ex + ∑ τ ( k ) γ .
(k )
(7.20)
k
Используя выражение для производной (7.17) и симметричность
тензора ε x , найдем скорость изменения величины ϕ:
e
dφ ( ε ex )
dt
148
=
∂φ e
: εx ,
∂ε ex
(7.21)
Поскольку потенциал φ характеризует запасенную упругую энергию
на единицу объема, то полная производная по времени – скорость этой величины (сравнить с первым слагаемым правой части (7.19) или (7.20)). Сопоставляя первое слагаемое правой части (7.20) и (7.21), получаем
f e −1 ⋅ k ⋅ f e −T =
∂φ
,
∂ε ex
(7.22)
или
k = fe ⋅
∂φ e T
⋅f .
∂ε ex
(7.23)
Следует отметить, что в физических уравнениях упругого типа напряжения связаны с упругими деформациями, тогда как в соотношениях
неупругого типа (вязких, пластических, вязкопластических и т.д.) фигурируют соответствующие составляющие тензора деформации скорости,
выражаемые через напряжения. При этом соотношения для каждой из
составляющих мер деформации или скорости деформации записываются независимо. С другой стороны, кинематические соотношения связывают деформации или скорости деформации с полями соответственно
(полных) перемещений или скоростей перемещений, которые не могут
быть разделены на составляющие. Для объединения составляющих мер
деформации или скорости деформации в «полные» применяются или
мультипликативное, или аддитивное разложения мер, для чего требуется приведение мер к одному типу – либо к деформациям, либо к скоростям деформации. В рассматриваемой работе использовано аддитивное
разложение тензора деформации скорости; в связи с вышеизложенным
в законе упругости требуется переход к скоростям деформаций и на∂φ
пряжений. Для этого продифференцируем соотношение k = f e ⋅ e ⋅ f eT :
∂ε x
k = fe ⋅
∂φ e T e ∂ 2 φ e e T e ∂φ e T
⋅ f + f ⋅ e2 : ε x ⋅ f + f ⋅ e ⋅ f .
∂ε ex
∂ε x
∂ε x
(7.24)
Перепишем соотношение (7.24) в виде
∂ 2φ e e T
∂φ
∂φ
f e2 : ε x f = k − f e ⋅ e ⋅ f eT − f e ⋅ e ⋅ f eT .
∂ε x
∂ε x
∂ε x
e
(7.25)
149
Обозначим тензор четвертого ранга
∂ 2φ
, определенный в разгру∂ε ex2
x
x
x
x
x
женной конфигурации Kx, как πx = πijkl
ei e j e k el ≡
∂ 2φ
. Напомним, что
∂ε ex2
когда говорится «тензор, определенный в терминах (или в базисе) той
или иной конфигурации», это означает, что компоненты тензора в соответствующем базисе имеют ясно выраженный физический (геометрический, энергетический) смысл. Разумеется, тензор в силу своих свойств
можно преобразовать в любой другой базис, однако при этом, как правило, теряется физический смысл его компонент. Поскольку упругие
∂ 2φ
деформации малы, производную
можно определить в нуле, ис∂ε ex2
пользуя разложение в ряд Тейлора и ограничиваясь вторым порядком.
Заметим, что для выявления симметрийных свойств πx удобно воспользоваться кристаллографической системой координат.
Левую часть соотношения (7.25) в компонентах можно писать
следующим образом (вывод предоставляется читателю):
x ˆ elk i j
f e ⋅ (πx : ε ex ) ⋅ f e T = πijkl
d eˆ eˆ .
(7.26)
Отметим, что справедливо равенство:
x
x
x
x
x e
i e
j e
k e
l
e
⋅
⋅
⋅
⋅
f e ⋅ πx : ( f e T ⋅ d e ⋅ f e ) ⋅ f e T = πijkl
f
e
f
e
f
e
f
e
: d , (7.27)
(
)
в чем можно убедиться, записав правую часть (7.27) в компонентах.
Введем в рассмотрение математический объект π:
x
x
x
x
x e
i e
j e
k e
l
⋅
⋅
⋅
⋅
π = πijkl
f
e
f
e
f
e
f
e
.
(7.28)
Возникает вопрос о природе введенного объекта: является ли он
тензором? Заметим, что π образован из компонент тензора 4-го ранга πх
в базисе разгруженной конфигурации и полиадного базиса в актуальной
конфигурации. Напомним, что тензор – величина инвариантная по отношению к выбору системы координат, в то время как его компоненты
150
изменяются при переходе к другому базису (по вполне определенному
закону [50]). Согласно этому закону при разложении векторов «старого»
базиса ei , ei по векторам «нового» базиса e′i , e′i (и наоборот)
e j = a j i e′i , e j = b j i e′i , e′i = b j i e j , e′i = a j i e j ,
a j i = e j ⋅ e′i , b j i = e j ⋅ e′i ,
(7.29)
компоненты, например, тензора четвертого ранга A = A ijkl ei e j e k el преобразуются следующим образом:
A = A ijkl ei e j e k el = A spqt a s i e′i a p j e′ j a q k e′k a t l e′l =
= A spqt a s i a p j a q k a t l e′i e′ j e′k e′l = A′ijkl e′i e′ j e′k e′l ,
(7.30)
то есть
A′ijkl = A spqt a s i a p j a q k a t l .
(7.31)
Аналогичным образом, взяв за исходную запись тензора А в «новом» базисе, можно показать, что
A ijkl = A′spqt bi s b j p bk q bl t .
(7.32)
Нетрудно показать, что контравариантные компоненты тензора преобразуются с помощью матрицы b j i , при этом матрицы a j i и b j i
−1
взаимообратны, a j i = b j i , a j k bi k = δij ( δij – дельта Кронекера).
Сопоставляя (7.29) 1 и (7.32), (7.29) 3 и (7.31), легко обнаружить, что компоненты и базисные векторы преобразуются с помощью взаимообратных
матриц, что и предопределяет неизменность тензоров при заменах систем
координат.
Для решения поставленного выше вопроса (о природе введенного
объекта π) расширим обычную алгебру тензорного исчисления новой
операцией – позиционного умножения. Рассмотрим ее на примере двух
тензоров М (ранга т) и N (ранга п). Позиционным (p, q) произведением
(1 ≤ p ≤ т, 1 ≤ q ≤ п) тензоров М и N будем называть тензор L ранга
(т + п – 2), определяемый соотношением:
151
( p ,q )
M • N = M i1i2 ...i p ...im ei1 ei2 ...e p ...eim
i
( p ,q )
N j1 j2 ... jq .... jn e j1 e j2 ...e q ...e jn =
j
(
)
= M i1i2 ...i p ...im N j1 j2 ... jq .... jn ei1 ei2 ...e p−1 e p+1 ...eim e j1 e j2 ...e q−1 e q+1 ...e jn e p ⋅ e q =
i
i
j
j
i
j
(7.33)
= M i1i2 ...i p ...im N j1 j2 ... jq .... jn g p q ei1 ei2 ...e p−1 e p+1 ...eim e j1 e j2 ...e q−1 e q+1 ...e jn = L
i j
i
i
j
j
i
j
где (p, q) – номера перемножаемых базисных векторов e p и e q тензоров М и N, gij – (контравариантные) компоненты метрического тензора.
То, что L представляет собой действительно тензор, можно показать
аналогично приведенному выше примеру, доказательство предоставляется читателю.
С использованием введенной операции позиционного умножения
выражение (7.28) можно записать в виде:
x
x
x
x
x e
i e
j e
k e
l
f
e
f
e
f
e
f
e
π = πijkl
⋅
⋅
⋅
⋅
=
x
x
x
x
x e
i e
j k
e T l
eT
= πijkl
f ⋅ e f ⋅ e e ⋅ f e ⋅ f =
= fe
(7.34)
( 2,2 )
2
( 3,1)
e ∂ φ
eT
eT
f ⋅ e2 ⋅ f f .
∂ε x
Таким образом, π действительно является тензором (4-го ранга),
однако отличным от тензора πх. При этом из приведенных выводов вытекает, что левую часть соотношения (7.25) можно представить в виде:
f e ⋅ (πx : ε ex ) ⋅ f e T = π : d e . Следует отметить, что в цитируемой работе
приводится несколько иной вид тензора π:
∂ 2φ
π = f e ⋅ f e ⋅ e 2 ⋅ f eT ⋅ f eT .
∂ε x
(7.35)
К сожалению, авторам не удалось доказать правомочность такого
перехода, вероятно, он не верен.
Преобразуем правую часть соотношения (7.25):
152
k −fe ⋅
∂φ e T e ∂φ e T
⋅f − f ⋅ e ⋅f =
∂ε ex
∂ε x
∂φ
∂φ
= k − f e ⋅ f e −1 ⋅ f e ⋅ e ⋅ f e T − f e ⋅ e ⋅ f e T ⋅ f e −T ⋅ f e T
∂ε x
∂ε x
e
eT
= k − l ⋅k − k ⋅l .
(7.36)
Тогда соотношение (7.25) может быть приведено к виду
π : de = k − l e ⋅ k − k ⋅ l e T .
(7.37)
Подставим разложение упругой составляющей градиента скоростей перемещения le на симметричную de и антисимметричную части we
в последнее соотношение:
π : de = k − ( de + w e ) ⋅ k − k ⋅ ( de + w e ) =
T
(7.38)
= k − w ⋅k + w ⋅k − d ⋅k − k ⋅d .
e
e
e
e
В (7.38) учтено, что d eT = d e , w eT = − w e . Группируя слагаемые в
соотношении (7.38), перейдем к виду
π : de + de ⋅ k + k ⋅ de = k − w e ⋅ k + k ⋅ w e .
(7.39)
Проанализируем члены в левой и правой частях соотношения.
В левой части учтем, что для металлов, подвергаемых упругопластическому деформированию, компоненты напряжений на несколько порядков меньше упругих модулей (случай гидростатического нагружения
при сверхвысоких давлениях из рассмотрения исключается), в силу чего
2-м и 3-м слагаемыми в левой части (7.39) можно пренебречь. В правой
части, учитывая, что рассматривается геометрически нелинейная проблема при произвольных градиентах скоростей перемещений (а следовательно, произвольных w e ), 2-м и 3-м членами в общем случае пренебречь не представляется возможным. Соотношение (7.39) тогда примет вид
π : de = k − w e ⋅ k + k ⋅ w e .
(7.40)
153
Используя (7.7), преобразуем (7.40) к следующему виду:
π : ( d − din ) = k − ( w − w in ) ⋅ k + k ⋅ ( w − w in ) =
= k − w ⋅ k + k ⋅ w + w in ⋅ k − k ⋅ w in = k J + w in ⋅ k − k ⋅ w in ,
(7.41)
или
k J = π : ( d − din ) − w in ⋅ k + k ⋅ w in ,
(7.42)
где введено обозначение производной Яуманна взвешенного тензора напряжений Кирхгоффа k J = k − w ⋅ k + k ⋅ w . Применяя (7.6), перепишем
соотношение (7.41) в виде
π : ( d − din ) = k J + ∑ ( m ((Аk )) γ ( k ) ⋅ k − k ⋅ m ((Аk )) γ ( k ) ).
(7.43)
k
Далее авторы статьи конкретизируют выражения для скоростей
сдвигов γ ( k ) . Отмечается, что γ ( k ) зависят, в первую очередь, от напряженного состояния через сдвиговые напряжения на каждой k-й СС. Для
описания скорости сдвига γ ( k ) используется степенной закон Хатчинсона [105].
γ
(k )
=γ
(k )
0
τ(k ) τ(k )
(k ) (k )
τc τc
(1/ m ) −1
,
(k )
τ ( k ) = k : m (S)
,
(7.44)
где γ (0k ) – скорость сдвига при сдвиговых напряжениях τ (k), равных критическим τ (ck ) , которые полагаются одинаковыми для всех СС, m – параметр скоростной чувствительности материала. Скорости сдвигов однозначно определяются соотношением (7.44) и в теориях вязкоупругого
типа отличны от нуля при любых сдвиговых напряжениях на СС, не
равных нулю; в упруговязкопластических моделях скорости сдвигов
полагаются равными нулю при τ(k) < τ (ck ) . При этом не возникает вопроса
о выборе активных СС и их числе, все скорости сдвигов определяются
независимо по сдвиговым напряжениям.
В цитируемой работе приводится часто используемый простейший
закон изотропного упрочнения, согласно которому упрочнение (изме154
нение τ (ck ) ) принимается одинаковым для всех СС и зависящим от накопленного суммарного сдвига γ:
τ c( k ) = τ c( k ) ( γ ) , γ = ∑ γ ( k ) .
(7.45)
k
Рассматривается также более сложная форма закона упрочнения.
Изменение критических напряжений определяется соотношением
τ (ck ) = ∑ hαβ γβ
(7.46)
β
где hαβ – функция накопленного сдвига γ (7.45) 2. В недеформированной
конфигурации каждое τ (ck ) принимается равным τ0. Соотношение для hαβ
принято аналогичным предложенному в работе [106]:
hαβ = qh + (1 − q ) hδαβ ,
(7.47)
безразмерный параметр q определяет отношение величины латентного упрочнения к деформационному, h (размерность Па) – параметр, характеризующий активное (деформационное) упрочнение, δαβ – символ Кронекера.
Принятый в работе закон латентного упрочнения подтвержден экспериментальными данными [150]. Для компланарных систем отношение латентного упрочения к деформационному упрочнению близко к 1, для некомпланарных – изменяется в диапазоне от 1,0 до 1,4. При вычислениях
для компланарных СС параметр q = 1, для некомпланарных q = 1,4.
Модель поликристалла
В цитируемой работе авторы рассматривают агрегат, состоящий из
большого числа зерен. Отклик каждого зерна описывается ОС (7.42).
Через Sext обозначается внешняя поверхность поликристалла, ограничивающая представительный макрообъем V.
Рассматривается квазистатическое нагружение, массовыми силами
пренебрегается, граничные условия в перемещениях принимаются такими, что деформации являются однородными в образце. Переход от
мезоуровня к макроуровню представляет собой осреднение по объему
[102]. В предлагаемой модели условия совместности и равновесия вы155
полняются в каждом зерне, но равновесие может быть нарушено между
зернами.
Далее в рассмотрение вводится первый тензор Пиола–Кирхгоффа kI,
связанный с взвешенным тензором Кирхгоффа соотношением
k I = f −1 ⋅ k .
(7.48)
Сила dP, действующая в произвольный момент времени t на единичную площадку в Kt, но отнесенная к единице площади в K0, определяется уравнением
dP = N ⋅ k I dS ,
(7.49)
где N и dS задают направление и площадь материальной площадки в отсчетной конфигурации K0.
Через F обозначается деформационный градиент макроуровня, который согласно принимаемой гипотезе Фойгта однороден в рамках
представительного объема. Принимается гипотеза, что первый тензор
Пиола–Кирхгоффа kI удовлетворяет условию равновесия в пределах
каждого зерна (но не между ними). Записывается работа внешних сил
по объему агрегата, которая представима суммой интегралов по подобъемам, далее используется теорема Гаусса–Остроградского:
∫k
V
I
: FdV = ∑ ∫ k I : FdVg =
g Vg
∫ ∆t ⋅ udS + ∫ t ⋅ udS
Sint
(7.50)
Sext
где Vg – объем g-го зерна, ∆t – разница усилий между зернами по границе зерна; Sint – межзереннная граница в агрегате. Заметим, что первый член правой части является суммой по всем межзеренным границам
в агрегате.
Условия однородных перемещений на внешней границе Sext можно
представить в виде u = F ⋅ x . Тогда последнее выражение можно записать следующим образом:
∑∫k
g Vg
156
I
: FdVg −
Sext
∫ ∆t ⋅ udS = ∫ xtdS : F .
Sint
(7.51)
Далее авторами работы принимается существенное допущение,
лежащее в основе процедуры осреднения, которое состоит в том, что
второе слагаемое левой части (7.51) пренебрежимо мало по отношению
к остальным слагаемым. Отметим сомнительность этой гипотезы и отсутствие каких-либо попыток ее обоснования со стороны авторов цитируемой работы. Тогда (7.51) можно записать:
∑∫σ
g Vg
n
: Fg dV = ∫ xtdS : F .
sext
(7.52)
Полагая F однородным по всему объему поликристаллического
агрегата, (7.52) приводится к виду:
∑∫k
g Vg
I
: Fg dV = V k I : F,
kI =
1
∑ k I dVg , V = ∑g Vg .
V g V∫g
(7.53)
Данная модель использовалась для вычисления напряженно-деформированного состояния упрочняющегося материала ГЦК-поликристалла. Авторы работы отмечают, что предлагаемая модель пригодна для
описания формирования текстуры материала. Проанализировано влияние упрочнения на текстуробразование и рассмотрено влияние параметра скоростной чувствительности m на текстурообразование. Хорошее согласование с экспериментами показывают результаты расчетов
при принятой низкой скоростной чувствительности (использовано
m = 0,005); уменьшение этого параметра приводит к более четко выраженной текстуре, что не так хорошо согласуется с экспериментальными
данными. В работе представлены обратные полюсные фигуры при различных схемах нагружения (сжатие, растяжение) и на различных стадиях деформирования.
Подробно рассмотрена процедура численного решения. Исследовалось поведение поликристаллической меди (закон распределения начальной ориентации зерен – равномерный) при растяжении и сжатии
в условиях осевой симметрии и плоскодеформированного состояния.
Использовались смешанные граничные условия, объемными силами
пренебрегалось, принята гипотеза Фойгта; в качестве процедуры определения осредненных напряжений для представительного объема поликристалла принято осреднение по объему. Приведены результаты рас157
чета развития текстуры, отмечается существенное влияние на её эволюцию параметра латентного упрочнения. Представлены расчетные кривые «интенсивность напряжений – интенсивность деформаций» для
различных значений параметра латентного упрочнения. Отмечается
достаточно быстрый (при ε и ≈ 0,1 ) выход упрочнения на уровень насыщения; дальнейший рост интенсивности напряжений при больших деформациях ( ε и ≥ 0, 4 ) связывается с формированием текстуры («геометрическое упрочнение»).
Для случая комбинированного нагружения (растяжение – сжатие
с одновременным сдвигом) при различных предварительных деформациях растяжения и сжатия построены условные «поверхности текучести» с различным допуском на неупругие деформации. Из полученных
расчетных кривых видно, что предлагаемая модель качественно описывает образование «носика» на поверхности текучести в направлении нагружения, уплощение тыльной части поверхности, эффект Баушингера.
К работе [64] вплотную примыкает работа [114]. В работе рассматривается упруговязкопластическая модель неупругого деформирования поликристалла. В отличие от более ранней работы [64] в [114]
учитывается термоактивируемое движение дислокаций; законы упрочения основаны на модели «механического порогового напряжения»
(MTS – mechanical threshold stress), предложенной Фоллансби и Куксом
[93]. Отмечается, что модель способна описывать отклик материала на
макроуровне и эволюцию кристаллографической текстуры. Численное
моделирование проводилось для поликристалла тантала (ОЦК-решетка)
коммерческой чистоты при деформациях около 60 %; скорость нагружения варьировалась в широких пределах от квазистатического нагружения до скорости деформирования 30 с–1; изменения температуры были в диапазоне от 200 до 525 ºС.
В цитируемой работе также используется мультипликативное
разложение деформационного градиента (транспонированного градиента места):
f = f e ⋅ f in ,
(7.54)
где fe – упругая составляющая деформационного градиента, fin – неупругая составляющая, описывающая эффективное движение дислокаций по
СС. В силу изохоричности неупругих деформаций det (fin) = 1, det (fe) >0.
158
Вводятся в рассмотрение следующие меры напряженного состояния: первый тензор Пиола–Кирхгоффа k I , второй тензор Пиола–
Кирхгоффа k IIx в разгруженной конфигурации Kx:
(k
k I = det ( f ) f −1 ⋅ σ
T
I
= det ( f ) σ ⋅ f − T ) ,
k IIx = det ( f e ) f e −1 ⋅ σ ⋅ f e −T ,
(7.55)
где σ – тензор напряжений Коши. Определяется тензор упругих деформаций Коши–Грина в разгруженной конфигурации Kx:
ε ex =
1 eT e
(f ⋅ f − I ) .
2
(7.56)
Отмечается, что неупругий градиент скорости перемещений полностью определяется движением краевых дислокаций по известным СС
и представим в виде
f in ⋅ f in −1 = ∑ γ ( k ) b
(k )
(k )
n ,
(7.57)
k
(k )
(k )
где b , n – единичные векторы в направлении вектора Бюргерса
и нормали k-й СС. Авторы цитируемой работы отмечают, что выражения для скоростей сдвига по СС можно описать степенными соотношениями вида [105]
γ
(k )
τ(k )
= γ0 (k )
τc
1/ m
sign ( τ ( k ) ) ,
(7.58)
где τ ( k ) – сдвиговые касательные напряжения, τ (ck ) – критические напряжения сдвига, γ 0 – скорость сдвига при сдвиговых напряжениях τ ( k ) , равных критическим, m – параметр, характеризующий скоростную чувствительность материала (модель называется независимой от скорости,
если m → 0 ). Однако такое упрощенное описание скоростей сдвигов СС
пригодно для вязкопластических материалов только в узком диапазоне
скоростей деформаций и температур, но не пригодно для описания ди159
намических нагружений, в связи с чем предлагается модифицировать
это соотношение, опираясь на уравнение Орована.
Скорость сдвига k-й CC может определяться соотношением Орована [147], которое отражает физическую картину движения дислокаций при плотности подвижных дислокаций ρ ( k ) с модулем вектора Бюргерса b:
γ ( k ) = ρ ( k )bv ( k ) ,
(7.59)
где v ( k ) – величина средней скорости движения дислокаций по k-й СС,
которая в общем виде является функцией сдвиговых напряжения τ ( k ) ,
критических напряжений τ (ck ) и абсолютной температуры θ:
v ( k ) = v ( k ) ( τ ( k ) , τ c( k ) , θ ) .
(7.60)
Отмечается, что критические напряжения сдвига характеризуют
силу взаимодействия подвижных дислокаций и препятствий, плотность
и взаиморасположение этих препятствий:
τ c( k ) = τ c( k ) ( θ, микроструктура ) .
(7.61)
Для средней скорости движения дислокаций по k-й СС при сдвиговых напряжениях принимается:
v
(k )
0, если τ ( k ) < τ c( k ) ( 0 ) ,
=
(k )
(k )
> 0, если τ = τ c ( 0 ) .
(7.62)
Здесь τ c( k ) ( 0 ) – критические напряжения сдвига при абсолютной
температуре, равной нулевой, при этом полагается, что превышение
сдвиговыми напряжениями на СС значения τ c( k ) ( 0 ) невозможно.
Сопротивление сдвигу τ c( k ) ( 0 ) при абсолютном нуле температуры
называется «механическим пороговым напряжением» (MTS – mechanical threshold stress) [93, 112]. Авторы работы отмечают, что в реальных
материалах в силу флуктуаций микроструктуры скорость дислокаций не
160
будет изменяться скачком, как в соотношении (7.62), однако «пороговый» характер будет проявляться.
При температуре θ > 0 неупругое деформирование может протекать посредством нескольких физических механизмов. Во-первых, поскольку основным механизмом, определяющим величину критического
напряжения τ (ck ) , является упругое взаимодействие атомов, то повышение температуры, которое сопровождается уменьшением модулей упругости, приводит к снижению величины τ (ck ) , поэтому при θ > 0
τ c( k ) ( θ ) < τ c( k ) ( 0 ) . Во-вторых, что, вероятно, более важно, с повышением
температуры локальные близкодействующие барьеры движению дислокаций (с характерным размером менее 10 атомных диаметров) могут
быть преодолены при достаточно низких напряжениях сдвига за счет
тепловых флуктуаций.
Таким образом, по утверждению авторов, можно разделить барьеры для движения дислокаций на два типа: 1) которые могут быть преодолены с помощью термической флуктуаций, и 2) которые непреодолимы за счет термических флуктуаций. Соответственно критическое
напряжение сдвига предлагается разложить на две составляющие – термическую и атермическую:
τ c( k ) = τ∗( k ) ( θ, микроструктура ) + τ (ak ) ( θ, микроструктура ) ,
(7.63)
где τ∗( k ) – описывает вклад в упрочнение барьеров 1-го типа, τ (ak ) – барьерами 2-го типа. Типичные примерами атермических барьеров являются
группы дислокаций, большие некогерентные включения. Напряжения
Пайерлса, примесные атомы, лесовые дислокации – барьеры 1-го типа.
Следует заметить, что в цитируемой работе не обсуждается вопрос
о приемлемости гипотезы об аддитивности вкладов от двух указанных
типов барьеров. Также вызывает вопросы явная зависимость атермической составляющей от температуры, возможно, авторы имели в виду
косвенное влияние на критические атермические напряжения упругих
и прочностных свойств дальнодействующих барьеров.
В рассмотрение вводятся эффективные сдвиговые напряжения τeff,
определяемые соотношением
τ (effk ) = τ ( k ) − τ (ak ) .
(7.64)
161
Отмечается, что данные напряжения характеризуют термическую составляющую напряжений и применимы для описания ОЦК- и ГПУ-кристаллов (напряжения Пайерлса возрастают с уменьшением температуры).
Тогда соотношение (7.62) может быть записано следующим образом:
(k )
v ( k ) = v ( k ) ( τ eff
, τ∗( k ) , θ ) .
(7.65)
Основываясь на ранее опубликованной монографии A.S. Krausz
и H.E. Eyring (1975), вводится свободная энтальпия активации (или свободная энергия Гиббса) ∆G∗( k ) , которая определяет величину энергии,
необходимой для преодоления барьера и реализации приращения сдви ∆G ( k )
га. Величина exp − ∗
(kb – константа Больцмана) является веk
θ
b
роятностью того, что термическая флуктуация энергии, равная (или
выше) требуемой величины для осуществления приращения сдвига,
имеет место в материале при температуре θ>0. Скорость, с которой дислокации преодолевают препятствия, определяется выражением:
∆G ( k )
ν exp − ∗
,
k
θ
b
(7.66)
где ν – характерная частота (порядка 1012 c–1). Обозначая l(k) среднюю
длину пробега дислокации, записывается средняя скорость движения
дислокаций:
v(k )
(k )
0, если τ eff
≤0
(k )
∆G∗( k ) ( τ eff
, τ (ak ) )
= (k )
(k )
, если 0 < τ eff
ν
exp
−
< τ (ak )
l
kb θ
(7.67)
Используя (7.67) и соотношение Орована, скорости сдвигов могут
быть преобразованы к виду
γ(k )
162
(k )
0,
если τ eff
≤0
(k )
∆G∗( k ) ( τ eff
, τ (ak ) )
= (k )
(k )
, если 0 < τ eff
γ
exp
−
< τ (ak )
0
kb θ
(7.68)
где γ (0k ) = ρ (mk )bl ( k ) v . Полагается, что для упрощения модели множитель
γ (0k ) можно принять одинаковым на всех СС, обозначив его как γ 0 , вели-
чина γ 0 имеет порядок γ 0 ≈ 106 …107 с −1 . Следует заметить, что в общем
случае γ 0 является функцией приложенных напряжений и температуры
[112], однако в цитируемой работе эта зависимость не учитывается.
В работе [112] конкретизируется выражение для свободной энтальпии ∆G∗( k ) :
q
∆G∗( k )
τ( k ) p
,
= ∆F∗ 1 − eff
(k )
τ∗
(7.69)
где ∆F∗ – свободная энергия активации, требуемая для преодоления
барьеров скольжением без помощи приложенных сдвиговых напряжений, которая в анализируемой работе полагается одинаковой для всех
СС и не изменяющейся в случае, если вид препятствий не меняется.
Энергия активации ∆F∗ лежит в диапазоне:
0, 05 ≤
∆F∗
≤ 2,
µb3
(7.70)
где µ – модуль сдвига, b – модуль вектора Бюргерса. Параметры p и q
могут принимать значения: 0 ≤ p ≤ 1, 1 ≤ q ≤ 2 .
При неупругом деформировании кристаллита предлагается использовать соотношение:
(
)
τ ( k ) = τ (ak ) + Z θ, γ ( k ) τ∗( k ) ,
(7.71)
1/ p
θ 1/ q
где Z = 1 −
θc
∆F∗
. При θ = 0 параметр Z = 1,
γ
kb ln ( k0 )
γ
при θ = θ c получаем Z = 0. Таким образом, делается вывод, что темпера≤ 1, θ c =
тура, превышающая значение θ c , является достаточной для преодоле163
ния дислокацией препятствия посредством термической флуктуации
(без приложенных сдвиговых напряжений). Отметим, что соотношение
(7.71) представляется несколько непонятным, поскольку действующие
касательное напряжение определяется параметрами материала; вероятно, подразумевалось критическое напряжение сдвига.
Законы упрочнения
Сдвиговые напряжения k-й СС определяются согласно соотношению
τ ( k ) = ( f e T ⋅ f e ⋅ k IIx ) : b
(k )
(k )
n
.
(7.72)
Последнее соотношение можно преобразовать к более привычному виду, часто используемому в законе Шмида:
τ ( k ) = ( f e T ⋅ f e ⋅ k IIx ) : b
= det ( f
e
)( f
eT
⋅σ ⋅f
(k )
e −T
(k )
n
):b
(
)
= f e T ⋅ f e ⋅ det ( f e ) f e −1 ⋅ σ ⋅ f e −T : b
(k )
(k )
n
= det ( f
e
)σ : f
e−T
⋅b
(k )
(k )
(k )
n
=
(k )
n ⋅ f eT =
(7.73)
= det ( f ) σ : bˆ ( k )nˆ ( k ) = k : bˆ ( k )nˆ ( k ) ,
где
k = det ( f ) σ
– взвешенный тензор Кирхгоффа (учтено, что
det ( f ) = det ( f in ⋅ f e ) = det ( f in ) det ( f e ) = det ( f e ) ). Принимается, что упру-
гая составляющая f e тензора искажений близка к единичному тензору,
(k )
а сам f e можно считать ортогональным тензором: f e −1 = f e T ; bˆ ( k ) = f e ⋅ b ,
(k )
nˆ ( k ) = f e−T ⋅ n – ортонормированные векторы k-й СС в актуальной конфигурации.
В работе используется закон упрочнения стандартного типа:
τ c( k ) = ∑ h αβ γ (β ) ,
(7.74)
β
где γ (β ) – скорость сдвига по β-й CC, hαβ – матрица модулей упрочнения
(описывает деформационное и латентное упрочнение). Использование
модуля скоростей сдвигов γ (β ) отражает то обстоятельство, что упроч164
нение незначительно зависит от направления сдвига. Каждый элемент
матрицы hαβ зависит от истории деформирования.
Поскольку в работе используется разложение на атермическую
и термическую составляющую (7.63), то ключевым моментом является
определение эволюционных соотношения для внутренних переменных
τ∗( k ) , τ (ak ) . По мнению авторов, для ОЦК-кристаллов, в которых τ∗( k ) характеризует напряжения Пайерлса, можно принять:
τ∗( k ) = τ∗ = const ,
(7.75)
τ c( k ) = τ (ak ) = ∑ h αβ γ (β ) .
(7.76)
и
β
Следует заметить, что вывод о том, что термические составляющие критических напряжений τ∗( k ) могут быть постоянными, вызывает
некоторые сомнения, так как к этой составляющей авторы также относят дислокации леса, конфигурация и плотность которых не могут считаться постоянными.
Матрица модулей упрочнения принимается в виде [150]
hαβ = ( q1 + (1 − q1 ) δαβ ) hβ ,
(7.77)
где hβ – параметр деформационного упрочнения, q1 – параметр латентного упрочнения. Отмечается, что q1 не обязательно должен быть постоянным и может, как и hβ, зависеть от истории нагружения.
Основной целью данной работы является формулировка конститутивной модели для описания неупругого деформирования поликристаллов при сложном нагружения. В связи с этим авторы предлагают усложнить эволюционное соотношение для параметра hβ [76]:
hβ = h0β 1 −
τ (aβ )
τ (aβ )
sign
1 − (β )
τ (aβ, s)
τ a,s
,
(7.78)
где параметры модели h0β , τ (aβ, s) зависят от скорости деформирования
(
и температуры: h0β = h0β γ (β ) , θ
)
(
)
и τ (aβ, s) = τ (aβ, s) γ (β ) , θ – напряжение на-
сыщения для τ (aβ ) .
165
В качестве определяющего соотношения для монокристалла в цитируемой работе выступают термоупругий закон Гука, записанный
в разгруженной конфигурации Kx:
а k IIx = π : ( ε ex − b∆θ ) ,
(7.79)
где π – тензор 4-го ранга упругих свойств в разгруженной конфигурации, b – анизотропный тензор 2-го ранга теплового расширения в Kx,
∆θ – изменение абсолютной температуры.
Для поликристалла использовались гипотезы, предложенные в работе Тейлора [164], в соответствии с которыми градиент деформации
каждого зерна равен макроскопическому градиенту (расширенная гипотеза Фойгта). Для такой модели, подробно рассмотренной в [64], тензор
напряжений Коши макроуровня можно записать в виде
N
σ = ∑ ρ ( n )σ ( n ) ,
(7.80)
n=1
где ρ(n) – объемная доля каждого зерна в представительном объеме поликристалла. Принимая все зерна агрегата одинаковыми по объему, тензор напряжений Коши представим как
σ =
1
N
N
∑σ
(n)
.
(7.81)
n =1
Авторы внедрили представленную конститутивную модель в коммерческий конечно-элементный комплекс ABAQUS и провели ряд расчетов для изотермического и адиабатического случаев.
7.2. КРАТКИЙ ОБЗОР РАБОТ
ПО УПРУГОВЯЗКОПЛАСТИЧЕСКИМ МОДЕЛЯМ
Одной из первой работ, в которой представлены теоретические
результаты, полученные с применением физической упруговязкопластической модели, удовлетворительно согласующиеся с экспериментальными данными, была статья [170]. Модель, предложенная
в цитируемой работе, базируется на теории термоактивируемого
166
движения дислокаций (Kroner&Teodosiu (1972), Kratochvil&de Angelis (1971)) и модели Линя.
В предлагаемой модели приняты все гипотезы модели Линя, за исключением соотношений для определения скоростей (или приращений)
сдвигов: предполагается, что скорости сдвигов связаны с касательными
напряжениями на кристаллографических системах скольжения вязкопластическими соотношениями вида:
γ ( k ) = γ 0 exp[–H 0 / (kbθ)] sinh[ν∗ (τ ( k ) – τ c( k ) )],
τ ( k ) ≥ τ(ck ) , k = 1, K ,
(7.82)
где γ 0 – константа материала, Н0 – величина энергетического барьера
(Пайерлса); kb – константа Больцмана; θ – температура (К); ν∗ – константа, относящаяся к объему препятствий (так называемый активационный объем); τ ( k ) , τ c( k ) – касательное напряжение и критическое напряжение сдвига в k-й системе скольжения, причем τ (ck ) характеризует
сопротивление сдвигу на препятствиях, не преодолеваемых за счет термической активации, и связано с дальнодействующими полями напряжений; K – число систем скольжения (для рассматриваемых в работе
ГЦК-кристаллов принято K = 24, т.е. удвоенное число кристаллографических систем скольжения); при τ ( k ) < τ c( k ) скорость сдвига в k-й СС
равна нулю. Предлагается эволюционное уравнение для τ (ck ) , представляющее собой модификацию закона упрочнения Тейлора:
K
τ(ck ) = A ∑ γ (i ) – [ B(τ(ck ) – τˆ c )]m exp[–QD / (kbθ)] , k = 1, K , (7.83)
i =1
где А, В, m, τ̂ c – материальные константы, QD – энергия активации
диффузии.
В качестве основы конститутивной модели, как и в модели Линя,
используется (изотропный) закон Гука, записанный в скоростях. Численная процедура реализуется пошагово, задается история осредненных
скоростей полных деформаций (используется гипотеза Фойгта).
Предлагаемая модель была апробирована для случая простого
и сложного (на двухзвенных траекториях с изломами на углы 30, 60, 90,
167
120, 150 и 180о) нагружений поликристаллического алюминия при изотермическом деформировании при температуре 200 оС и скоростях деформирования от 3×10–5 до 3×10–3. Результаты расчетов находятся
в удовлетворительном соответствии с экспериментальными данными;
в частности, хорошо описывается эффект «нырка» (резкого падения интенсивности напряжений в окрестности точки излома траектории деформации; с описанием эффекта можно познакомиться в [51]).
К рассмотренной выше работе вплотную примыкает статья [171],
в которой более детально рассматривается процедура ориентационного
осреднения тензора напряжений. Рассмотрена также модификация модели для реализации процесса нагружения в пространстве напряжений.
Отмечается возможность использования вместо гипотезы Фойгта самосогласованной модели Кренера.
В работе [70] рассматривается вариант упруговязкопластической
модели со степенным законом течения вида (7.44) и комбинированным
(изотропным и кинематическим) законом упрочнения. Используется аддитивное разложение тензоров деформации скорости и вихря на упругую и неупругую составляющие
d = de + d p , w = w e + w p ,
(7.84)
неупругие деформации осуществляются сдвигом (в силу чего изохоричны); неупругие составляющие в (7.84) определяются соотношениями
(7.6) (т.е. для неупругих ротаций принимается полностью стесненная
модель Тейлора). Полагается, что скорость ротации решетки определяется упругим спином we. В качестве ОС для упругой составляющей
принимается изотропный закон Гука в скоростной форме; в качестве
меры скорости напряжений используется производная яуманновского
типа тензора напряжений Коши:
σJ = σ + σ ⋅ we – we ⋅ σ .
Предложенная модель встроена в конечно-элементную программу
и использована для анализа образования полос сдвига в монокристалле
при высокоскоростном деформировании (скорость деформации 103 с–1).
Модификация упруговязкопластической модели, учитывающая
наряду со сдвиговой модой деформирование двойникованием, предложена в [107]. Для скоростей сдвигов и скорости изменения объемной
168
доли двойников использован степенной закон с одинаковым показателем степени; для двойникования предполагается наличие предельной
доли двойников, запрещен обратный переход. Градиент скорости перемещений для зерна определяется как сумма трех составляющих: скорости сдвига в исходной матрице, скорости двойникования и скорости
сдвига в сдвойникованной области, взвешенных с объемными долями
каждой зоны. Для упрощения процедуры интегрирования соотношения
записываются в неизменной отсчетной конфигурации. Приведены примеры расчета текстуры для ГЦК- и ОЦК-поликристаллов; из сопоставления с экспериментальными данными следует, что неучет двойникования ведет к качественно неверным результатам. В [108] описанная модель расширена включением еще одной моды деформирования –
микрополос сдвига. Применение данной модели к ГЦК-поликристаллам
с низкой энергией дефекта упаковки позволило описать четыре стадии
кривой упрочнения; отмечается необходимость учета образования микрополос сдвига для корректного предсказания эволюции текстуры.
В последние годы физические теории вязкопластичности все шире
применяются для решения реальных прикладных задач МДТТ. В работе
[71] вязкопластическая самосогласованная модель использована для
анализа процесса равноканального углового прессования (РКУ). В качестве представительного объема макроуровня рассматривается совокупность 500 зерен, которое в каждом проходе подвергается однородной
сдвиговой деформации, определяемой углом излома канала. Материал –
поликристаллический алюминий, начальные ориентации зерен полагаются случайными, распределенными по равномерному закону. Каждое
зерно эллипсоидальной формы, окруженное матрицей с эффективными
характеристиками, описывается вязкопластической моделью. Предложена простая геометрическая модель дробления зерен, согласно которой в зависимости от отношения длин большой оси к наименьшей
и средней к наименьшей зерно дробится на две или четыре одинаковые
части. Ориентация после дробления сохраняется. Приведены результаты расчета напряженно-деформированного состояния, полюсные фигуры, распределение размеров зерен по проходам. Отмечается удовлетворительное соответствие полученных результатов экспериментальным данным.
Детальное изложение модели пластичности монокристалла содержится в работе [79]. Приведен общий вид условия текучести на СС:
169
τ ( k ) = ± f ( k ) (γ ( k ) , r ( k ) ,θ) ± τ c( k ) + ρ( k ) ,
(7.85)
(k )
где τ ( k ) – напряжение сдвига в k-й системе скольжения, τ ( k ) = σ : m (S)
;
функция f описывает вязкопластическое сопротивление сдвигу (для
пластичности, не зависящей от скорости деформации, она тождественно
равна нулю); θ – абсолютная температура; r ( k ) , τ c( k ) , ρ ( k ) – внутренние
(k)
переменные, характеризующие вязкостное (в цитируемой статье данная
составляющая называется «сопротивлением множественному скольжению», что связано с реализацией в вязкопластической модели сдвигов
одновременно по многим СС), квазистатическое и кинематическое упрочнение соответственно. Для внутренних переменных r ( k ) , τ c( k ) , ρ ( k )
эволюционные феноменологические уравнения в общем виде записываются следующим образом:
{
{γ
{γ
}
, τ , ρ , θ} ,
, ρ , θ}.
r ( k ) = rˆ( k ) γ( k ) , r (k ) , r (l ) , τc(k ) , τc(l ) , ρ(k ) , θ ,
τ(ck ) = τˆ c( k )
ρ( k ) = ρˆ (k )
(k )
, r ( k ) , r (l ) , τc( k )
(k )
, r (k ) , r (l ) , τc(k )
(l )
c
(k )
(7.86)
(k )
Знак «^» введен для отделения обозначения функции от ее значения;
наличие в 1-м и 2-м соотношении соответственно r (l ) и τ(cl ) означает учет
упрочнения за счет взаимодействия дислокаций на сопряженных СС.
Формулировка конститутивной модели основана на термодинамическом подходе. Прежде всего, авторы вводят сопряженные параметрам
r ( k ) , τ c( k ) , ρ ( k ) термодинамические переменные состояния R ( k ) , Τ ( k ) , Ρ ( k ) .
Функция свободной энергии (Гельмгольца) представляется суммой «упругой» и «неупругой» составляющих, ψ = ψ e + ψi . «Упругая» составляющая
зависит от тензора упругих деформаций и температуры, по ней из неравенства Клаузиуса–Дюгема определяется тензор напряжений Коши. «Неупругая» составляющая связана с внутренними переменными, определенными
на СС, в связи с чем предлагается следующее представление:
(
)
ρ0 ψi = ∑ ψ(Rk ) + ψΤ( k ) + ψ(Ρk ) ,
k
170
(7.87)
где ρ 0 – плотность материала, ψ(Rk ) , ψΤ( k ) , ψ(Ρk ) – составляющие свободной энергии на k-й СС, являющиеся явными функциями соответствующих термодинамических параметров состояния R ( k ) , Τ ( k ) , Ρ ( k ) . Из неравенства Клаузиуса–Дюгема с учетом независимости термодинамических параметров состояния R ( k ) , Τ ( k ) , Ρ ( k ) непосредственно следует
общий вид эволюционных уравнений для r ( k ) , τ (ck ) , ρ ( k ) :
r ( k ) = ρ0
∂ψΤ( k )
∂ψi ∂ψ R( k ) (k )
∂ψ i
=
;
τ
=
ρ
=
;
c
0
∂R( k ) ∂R( k )
∂ Τ (k ) ∂ Τ (k )
∂ψ(Ρk )
∂ψi
ρ ( k ) = ρ0
=
.
∂ Ρ(k ) ∂ Ρ(k )
(7.88)
Далее для построения в рамках термодинамического подхода теории вязкопластичности монокристалла вводится вязкопластический потенциал:
( )
(
)
ˆ k φ( k ) , где φ( k ) = φˆ ( k ) τ( k ) , r ( k ) , τc( k ) , ρ( k ) , θ .
Ω= ∑Ω
k
(7.89)
С использованием вязкопластического потенциала, учитывая, что
пластические деформации реализуются сдвигом по СС, получают следующее соотношение:
dp =
∂Ω
∂Ω ∂φ( k )
(k )
.
= ∑ (k )
= ∑ γ ( k )m (S)
∂σ k ∂φ
∂σ
k
(7.90)
Суммирование в записанных выше соотношениях осуществляется
по всем активным системам скольжения.
Функция диссипации Ф определяется разностью между мощностью работы напряжений на пластических деформациях и мощностью
работы на квазистатическом (или вязком) и кинематическом упрочнении, чему соответствуют два представления функции диссипации:
Φ = σ :d p – ∑ ∑ ρ0
k
l
∂ψi ∂ψΤ(l ) (k )
∂ψi ∂ψ(Ρl ) (k ) (7.91)
Τ
–
ρ
∑k ∑l 0 ∂ψ(l ) ∂ Ρ(k ) Ρ ,
∂ψΤ(l ) ∂ Τ (k )
Ρ
171
k l
Φ = σ :d – ∑
p
∂ψi ∂ψ(Rl ) (k )
∂ψi ∂ψ(Ρl ) (k ) (7.92)
∑ ρ0 ∂ψ(l ) ∂ R(k ) R – ∑k ∑l ρ0 ∂ψ(l ) ∂ Ρ(k ) Ρ .
R
Ρ
Относительно соотношения (7.91) необходимо отметить следующее: по сути дела, считается, что часть энергии не диссипирует, а запасается в виде внутренней энергии упругих искажений решетки, энергии
взаимодействующих дислокаций, что и описывают 2-й и 3-й члены правой части. Соотношение (7.92) в этом смысле менее понятно: как правило, вязкостное трение приводит к рассеянию энергии; вероятно,
в данном случае следует помнить о вязкопластичности, т.е. повышение
вязкого сопротивления приводит к повышению запасенной упругой
энергии, реализуемой при разгрузке.
Приведенная формулировка модели, обозначаемая как ЕВ-модель
(E. Busso), далее сопоставляется с другими известными соотношениями
пластичности монокристаллов. В рассмотрение включены модели
G. Calletaud и L. Meric e.a. (обозначенные как GC), L. Anand с соавторами (LA), D. McDowell&R. McGinty (DM). Все указанные модели относятся к классу упруговязкопластических, однако в рамках моделей GC
и LA рассматриваются также варианты с исключением вязких членов.
В табл. 7.1 и 7.2 приведена достаточно полная информация обо всех соотношениях анализируемых моделей. В табл. 7.1 приведены функции,
описывающие вязкопластичность, выражения составляющих свободной
энергии, соотношения для сопряженных термодинамических переменных, характеризующих различные виды упрочнения. В табл. 7.2 содержатся сведения об эволюционных уравнениях для критического напряжения сдвига, вязкого сопротивления и остаточных микронапряжений.
Реализация всех рассматриваемых моделей осуществлялась с использованием МКЭ и неявной схемы интегрирования по времени. Сопоставление результатов расчета осуществлено для ГЦК-монокристаллов
(12 потенциально активных систем скольжения). Идентификация параметров модели проводилась для случая одноосного нагружения по направлению 100 при квазистатическом нагружении и использовании закона упрочнения Тейлора. Калибровка проводилась таким образом, чтобы влияние вязкостных членов в интервале скоростей деформации 10–1–10–3 с–1
было весьма малым. Во всех моделях при калибровке пренебрегалось кинематическим упрочнением (т.е. ρ k = 0 ). Все коэффициенты моделей сведены в табл. 7.3.
172
Таблица 7.1
Функции, используемые в моделях пластичности кристаллов
Функции
f
GC
τ ( k ) − ρ ( k ) − τ (ck ) − τ c0
(k)
γ(k )
γ 0 f k τˆ 0
EB
F
γ 0 exp − 0 1 − ( f
kθ
n
LA
τ( k ) − ρ( k )
τ ( k ) − ρ ( k ) − τ (ck )
(k )
τˆ 0 )
p
q
γ0 f (k ) r(k )
DM
τ( k ) − ρ( k )
n
γ0 f ( k ) r ( k )
ψ̂(Rk ) { R(k ) }
–
–
1 h ( R(k ) )2
2 τ
ψ̂T(k ) {T (k ) }
1 τ(k ) h ∑ hklT l
2 c τ l
1 h (T ( k ) ) 2
2 τ
2
1
hτ ( R ( k ) )
2
–
–
ψ̂(Pk ) { P(k ) }
1 h ( P ( k ) )2
2 R
1 h ( P ( k ) )2
2 R
1 h ( P ( k ) )2
2 R
2
1
hR ( P ( k ) )
2
r (k)
–
–
hτ R ( k )
hτ R ( k )
τ (ck )
hτ ∑ l h T ( l )
kl
hτ T ( k )
–
–
ρ( k )
hρ R ( k )
hρ R ( k )
hρ R ( k )
hρ R ( k )
n
Таблица 7.2
Эволюционные уравнения для различных моделей
Модель
)
τ (ck(GC)
=
)
τ (ck(EB)
=
(k )
(LA)
r
=
∑ l hkl hτ − d τT (l ) γ (l )
Уравнение
∑ h (h
− d τ τ (cl ) − τ 0 γ ( l )
∑ hτ q
+ (1 − qh )δ kl 1 − r
kl
τ
l
l
h
{
)
(l )
(k )
r(DM)
=
∑ q hτ
ρ( k ) =
hρ si g n( γ ( k ) ) − d ρ ρ ( k ) γ ( k )
l
h
r∗
}
a
γ (l )
γ (l ) − (qh − 1)hτ γ (l ) − dτ r (l ) ∑ l qh γ ( l ) − (qh − 1) γ (l )
Результаты расчета кривой σ – ε при растяжении ГЦК-монокристалла в направлении [1 0 0] при скорости деформации 10–3 с–1 для
всех четырех вязкопластических моделей обнаруживают удовлетворительное соответствие.
Анализируются результаты расчетов с использованием указанных
вязкопластических моделей при двухосном деформировании монокристаллов. Кристаллографическое направление [1 0 0] совпадает во всех
численных экспериментах с одной из осей главных деформаций Х1. Для
173
Таблица 7.3
Материальные параметры анализируемых моделей
Параметр
Параметры
вязкопластических моделей
C11
C12
C44
γ0
n
τ0
F0
p
q
GC
250
200
100
1,0
2,0
20
–
–
–
τc0
100
105
103
108
100
–
МПа
r0
r*
a
hτ
–
–
–
1008
–
–
–
1150
103
195
0,929
1824
108
–
–
2203
–
–
–
1092
100
235
1,6
1953
МПа
МПа
–
МПа
dτ
84 672
12,1
–
10,5
9532
–
–
hρ
0,0
0,0
0,0
0,0
0,0
0,0
МПа
dρ
0,0
0,0
0,0
0,0
0,0
0,0
–
h , qh (активное)
0
0
0
0
0
0
–
1
1
1
1
1
1
–
kl
kl
h , qh (Тейлор)
EB
LA
250
250
200
200
100
100
150 7,3 10–4
–
0,01
465
–
48,9
–
0,163
–
1,220
–
DM
250
200
100
1,0
0,01
–
–
–
–
Параметры
упругопластических
Единицы
моделей
GC
LA
250
250
ГПа
200
200
ГПа
100
100
ГПа
–
–
с–1
–
–
–
МПа
–
–
–
–
КДж моль
–
–
–
–
–
–
реализации моделей используется МКЭ (пакет Zebulon) с элементами,
допускающими независимое задание нормальных и сдвиговых деформаций. Исследовались нагружения по лучевым траекториям деформации (двумерный вариант) при отношениях ε11 / ε 22 = −0,95…5,33
и ε11 / ε12 = 0,02…0, 40 (при неизменной скорости деформации ε11 = 10−2 с–1
во всех вариантах). Опыты на двухосное растяжение-сжатие осуществлялись при использовании изотропного закона упрочнения Тейлора
( h kl = qh = 1, 0 ), сопоставление проведено для траекторий напряжений
σ11 – σ 22 . Результаты расчетов по всем четырем моделям находятся
в удовлетворительном соответствии. Рассмотрена также активация систем скольжения и накопленный на них сдвиг; для варианта
ε11 / ε 22 = 5,33 отмечается, что при напряжении σ11 ≈ 250 МПа из мно174
жества СС {1 1 1} 1 1 0
активировались четыре первичные системы
скольжения, а при напряжении σ11 ≈ 310 МПа – дополнительно четыре
вторичные СС.
В экспериментах на растяжение-сдвиг использовались оба закона
упрочнения – Тейлора и деформационного ( h kl = qh = 0, 0 ). Здесь отмечается существенное отличие результатов, полученных, с одной стороны, с помощью моделей EB и GC, с другой – LA и DM; в двух последних при напряжениях σ11 ≈ 210 и 350 МПа соответственно резко активизировались вторичные СС. Данное обстоятельство связано с тем, что
в моделях LA и DM учтен разворот кристаллической решетки, что отсутствует в моделях EB и GC. Для проверки этой гипотезы были проведены расчеты с использованием модели DM, в которой были отключены
повороты; результаты оказались близки к результатам моделей EB
и GC. Сопоставлялись также накопленные сдвиги, результаты аналогичны: близость данных по моделям EB и GC и их резкое отличие от
полученных с помощью моделей LA и DM. Отмечается также, что возможным источником различия результатов являются использованные
в моделях различные схемы решения нелинейных уравнений, основанные на методе Ньютона–Рафсона; исследованию данного вопроса авторы собираются посвятить будущие работы.
Аналогичное сопоставление осуществлено для всех пяти программ
нагружения при использовании упругопластических моделей LA и GC. Во
всех расчетах принят закон упрочнения Тейлора ( h kl = qh = 1, 0, ρ ( k ) = 0 ).
Для случая двухосного растяжения-сжатия траектории нагружения
σ11 – σ 22 оказываются близкими; кроме того, обнаруживается их малое отличие от траекторий, полученных с помощью вязкопластических моделей
LA и GC. Для варианта ε11 / ε 22 = 5,33 приведены результаты расчета суммарной скорости сдвигов как функции напряжения σ11 и времени. Для
обеих моделей при σ11 ≈ 270 и 285 МПа наблюдаются осцилляции суммарной скорости сдвига, что авторы связывают с неустойчивостью алгоритма в окрестности точек активизации вторичных СС. Проведено также
сопоставление номеров четырех первичных и вторичных активируемых
систем скольжения и накопленных сдвигов на них; за исключением нагружения по траектории ε11 / ε 22 = −0, 95 , где в модели GC не активировалась ни одна из вторичных систем; соответствие результатов следует при175
знать удовлетворительным, учитывая некоторое отличие траекторий нагружения (в модели LA в отличие от модели GC напряжение σ11 достигало в момент активизации вторичных СС нулевого значения). Аналогичное
удовлетворительное соответствие получено для программ нагружения растяжение-сдвиг.
Весьма подробно вопросы построения и применения физических
моделей упруговязкопластичности для описания поведения поликристаллов в широком диапазоне скоростей деформации (10–3–102 с–1) при больших деформациях (порядка 100 %) и относительно низких гомологических температурах (Тг < 0,3) рассмотрены в статье [68]. Как и в большинстве рассмотренных выше работ, использовано мультипликативное
разложение градиента места и ОС анизотропной гиперупругости (с учетом температурной деформации), в котором в качестве мер напряженного
и деформированного состояния приняты соответственно второй тензор
Пиола–Кирхгоффа и тензор деформаций Коши–Грина, определенные
в терминах разгруженной конфигурации.
Пластическое деформирование полагается реализующимся скольжением краевых дислокаций; следует отметить, что, как и во многих
других работах последнего десятилетнего периода, закон вязкопластичности выводится на основе уравнения Орована:
γ ( k ) = ρ(mk ) bv ( k ) ( τ ( k ) , τ c( k ) , θ ) ,
∑
,
(7.93)
k
где ρ (mk ) – плотность мобильных дислокаций, v ( k ) – средняя скорость
движения дислокаций в k-й СС, причем v ( k ) равна нулю при τ ( k ) < τ c( k ) .
Критическое напряжение сдвига полагается равным сумме двух составляющих: сопротивления близкодействующих барьеров, которые могут
быть преодолены за счет термических флуктуаций даже при напряжениях
ниже барьера Пайерлса–Набарро (называемого термической составляющей) τ (ctk ) и сопротивления дальнодействующих барьеров (называемого
атермической составляющей) τ (cak ) (см., например, [93]). Для модуля средней скорости движения дислокаций принимается соотношение:
v(k )
176
0
∆τ ( k ) ≤ 0,
ψ ( k ) ( ∆τ ( k ) , τ (ctk ) )
= (k )
−
0 < ∆τ ( k ) < τ ct( k ) ,
ν
exp
l
κθ
(7.94)
(k )
где ∆τ ( k ) = τ ( k ) – τ ca
, l
(k )
– средняя длина свободного пробега дислока-
ций, ν – характеристический частотный параметр (порядка 1012 с–1),
ψ ( k ) – свободная энтальпия активации (или свободная энергия активации Гиббса); направление движения совпадает с направлением сдвиговых напряжений. Предлагается модификация закона упрочнения, рассмотренного выше [64], для учета влияния температуры и скорости деформации.
Для определения макронапряжений используется процедура осреднения Тейлора по представительному объему, включающему 400 зерен.
Предлагаемая модель встроена в конечно-элементный пакет ABAQUS.
Подробно описаны процедура и результаты идентификации модели, выполненной для чистого (99,987 %) алюминия и алюминиевого сплава
(ГЦК-решетка). Для идентификации использованы известные в литературе экспериментальные данные по одноосному растяжению образцов при
нескольких значениях постоянных скоростей деформаций и температур.
Полученные параметры были далее приняты для теоретического предсказания поведения материала при одноосном нагружении со скачками
по скорости деформаций и температуре; режимы изменения скоростей
деформаций и температур выбраны аналогичными реализуемым в известных из литературы экспериментах. Сравнение расчетных и экспериментальных данных по зависимостям «напряжение – деформация» показывает хорошее соответствие.
Одним из недостатков моделей поликристаллов, основанных на
физических теориях, является необходимость рассмотрения большого
количества (сотни и тысячи) зерен со своими ориентациями, что требует
существенных затрат процессорного времени. Возможным вариантом
уменьшения вычислительных затрат является модель «текстурных компонентов», представленная в статье [75]. Под текстурным компонентом
понимается ориентация кристаллической решетки, для которой функция
распределения ориентаций (ФРО) имеет локальный максимум. Вместо
расчетов для большого числа зерен рассматриваются несколько (в данной работе – пять, четыре из которых соответствуют указанным локальным максимумам ФРО, пятый характеризует распределение остальных
ориентаций) элементов («псевдозерен»). Для каждого из псевдозерен
используется модель упруговязкопластичности со степенным законом
течения и изотропным законом упрочнения. Для аппроксимации ФРО
177
вблизи текстурных компонент принят закон распределения Мизеса–
Фишера. Вычисления искомых параметров (скоростей пластических
деформаций и напряжений) производятся далее для текстурных компонентов, после чего осуществляется ориентационное осреднение параметров
с локальными ФРО. На двух примерах для ГЦК-поликристаллов показано
удовлетворительное соответствие результатов, полученных с помощью
предлагаемой модели (5 элементов) и модели Тейлора (1000 зерен).
Модификация упруговязкопластической модели, учитывающая поврежденность материала, предложена в [152]. Классическое мультипликативное разложение градиента места дополнено составляющей, отвечающей за порообразование и переводящей пластически деформированную
конфигурацию в разгруженную. Приведены кинетические уравнения, описывающие эволюцию пор, связанную с наличием начальных пор, образованием пор от включений вторичной фазы и коалесценцией. Скорости
сдвигов по СС определяются степенным законом; использован гиперупругий закон, связывающий тензор деформаций Коши–Грина и второй тензор
Пиола–Кирхгоффа, определенные в разгруженной конфигурации. Для
случая одноосного нагружения проанализировано влияние ориентации
монокристаллических зерен на процесс накопления поврежденности
и кривые «напряжение – деформация». Для поликристаллического агрегата меры напряженного и деформированного состояния определяются осреднением по объему; сопоставление кривых σ–ε при растяжении поликристаллического образца для трех алюминиевых сплавов обнаруживает
хорошее соответствие экспериментальным данным.
Результаты применения упруговязкопластической модели для анализа особенностей деформирования двухфазного сплава (титан + алюминий) содержатся в статье [134]. Подробно рассмотрены физические
механизмы деформирования и упрочнения двухфазного сплава, основной объем которого составляет α-фаза с ГПУ-решеткой, остальная часть
имеет слоистую структуру из α + β-фаз (β-фаза – кристаллиты с ОЦКрешеткой). Анализируется деформирование представительного объема
поликристаллического агрегата; для решения на макроуровне использован пакет ABAQUS. Особое внимание уделяется идентификации физической модели, для чего авторами осуществлены три серии численных
экспериментов.
Модели обобщенных континуумов (в особенности – градиентные
теории) все чаще применяются исследователями в последние годы для
модификации различных физических теорий. Остановимся детальнее на
178
некоторых работах данного направления. В статье [161], основанной на
феноменологической градиентной теории пластичности [92], рассматривается вариант градиентной физической теории упруговязкопластичности. Анализируется случай малых градиентов перемещений, в связи
с чем не делается различия между отсчетной и актуальной конфигурациями. В духе микроморфного континуума Миндлина вводятся радиусы-векторы макроточки Х и микроточки х, соответствующие операторы
Гамильтона обозначаются как ∇ и . Каждой макроточке Х приписывается микрообъем δV, наделенный микроструктурой (системами скольжения). Скорости сдвига по произвольной k-й СС определяются разложением в ряд Тейлора с сохранением градиентов первого порядка:
γ ( k ) ( X, x) = γ ( k ) ( X) + x ⋅ γ ( k ) ( X) ,
где
(7.95)
γ ( k ) ( X) – осредненная по δV скорость сдвига по k-й СС,
γ ( k ) ( X) – осредненный по δV градиент скорости сдвига по k-й СС.
Пластическая составляющая тензора деформации скорости далее определяется обычным соотношением:
(k )
.
d p ≡ d′ p = ∑ γ ( k ) ( X, x) m (S)
(7.96)
k
Подстановка (7.95) в (7.96) и запись мощности напряжений в едини1
це объема на скоростях пластических деформаций, N p =
σ : d p dV ,
δV δ∫V
приводят к следующему результату:
N p = σ : d p + τ • ηp ,
где
(k )
d p = ∑ γ ( k ) ( X) m (S)
,
k
τ =
1
δV
∫ σ x dV ,
η p = ∑ m ((S)k ) γ ( k ) ( X) ,
k
(7.97)
σ =
1
δV
∫ σ dV ,
δV
A • B = Aijk Bijk ; тензор (третьего ранга) τ называет-
δV
ся тензором «парных напряжений».
179
Тензор скорости полных микродеформаций в δV полагается линейной функцией микрокоординат х. Тогда мощность напряжений на
единицу объема можно представить соотношением:
N=
где d =
1
δV
∫ d dV ,
δV
1
δV
∫ σ : d dV =
σ : d + τ • η ,
(7.98)
δV
η =
1
δV
∫ d dV . В дальнейшем полагается, что
δV
осредненный по δV тензор скорости микродеформаций d равен тензору скорости макродеформаций D в точке Х, D (Х) = d , а d∇ = η .
Уравнения равновесия и статические граничные условия макроуровня
получены на основе принципа виртуальной мощности. В качестве определяющих соотношений макроуровня использован закон Гука в скоростной форме как для напряжений, так и для парных напряжений:
σ = Π : De ,
τ = le2 Π : ηe ,
(7.99)
где lе – параметр, имеющий размерность длины и связанный с размером
области δV («упругий масштаб»), Π – обычный тензор упругих характеристик (4-го ранга).
На микроуровне используется модифицированная модель вязкопластичности. С этой целью вводятся эффективная скорость сдвига
и эффективные сдвиговые напряжения для каждой СС, включающие
в себя соответственно градиенты скоростей сдвигов и парные напряжения, с помощью масштабных коэффициентов приведенные к размерности скорости сдвига и обычного напряжения. Закон упрочнения по СС
определяется в терминах эффективной скорости сдвига. Принимается
степенной закон зависимости эффективной скорости сдвига от эффективного сдвигового напряжения на каждой СС. Модель замыкается гипотезой о равенстве отношений средних по СС скоростей сдвигов и их
градиентов (последние умножаются на масштабные факторы) и соответствующих энергетически сопряженных силовых факторов на каждой
СС, причем это отношение равно отношению эффективной скорости
сдвига к эффективному напряжению сдвига в каждой СС. Приведены
результаты решения модельной плоской задачи о деформировании бик180
ристалла; анализируется влияние на результаты параметров модели
(в частности, масштабных факторов).
Отдельную группу составляют модели, являющиеся, по сути, развитием теории скольжения Батдорфа–Будянского [2, 3] и которые представляется возможным назвать «квазифизическими». Остановимся на
одной из последних работ [157], содержащей краткий обзор моделей
данной группы.
В цитируемой работе предполагается, что механическое поведение
поликристаллического материала с хорошей точностью может быть
описано небольшим (от 5 до 10) числом структурных элементов (СЭ),
называемых авторами «зернами» (следует подчеркнуть, что в общем
случае СЭ не являются зернами в обычном смысле, каждый СЭ может
описывать поведение конгломерата зерен). СЭ выбираются в форме куба (хотя форма особого значения не имеет), в котором назначаются
6 независимых «систем скольжения»; заметим, что к СС в монокристаллах в общем случае (если СЭ действительно не представляет собой зерно) эти «системы скольжения» никакого отношения не имеют. Как
и в физических теориях упруговязкопластичности, пластические деформации полагаются изохорическими, реализующимися сдвигом по
введенным «системам скольжения». Используется неизотропный закон
упрочнения (деформационное и латентное упрочнение определяются
отличающимися модулями упрочнения); кроме того, для «систем
скольжения» СЭ учитывается кинематическое упрочнение.
Модель ориентирована на совместное использование с МКЭ с высокой степенью аппроксимации и применением численного интегрирования по конечным элементам. Каждой точке интегрирования «приписывается» один или несколько (с использованием процедуры осреднения) СЭ с определенной ориентацией; ориентации СЭ устанавливаются
в соответствии с полюсными фигурами материала исследуемой области.
На уровне конечных элементов (макроуровень) в качестве ОС используется закон Гука в релаксационной скоростной форме; скорости пластической деформации определяются в каждой точке интегрирования из
упомянутых выше вязкопластических соотношений для соответствующих (одного или нескольких) СЭ.
Предложенная модель использована для решения нескольких тестовых задач (растяжение и простой сдвиг образцов, растяжение тонкой
пластины с круговым отверстием). Сопоставление результатов с экспериментальными данными и результатами, полученными с помощью
181
классической теории течения и физической теории упруговязкопластичности (40 зерен на КЭ), показывает их хорошее соответствие. При
этом время расчетов по предлагаемой модели сопоставимо (превосходит не более чем на порядок при использовании 7 СЭ на точку интегрирования) со временем решения по теории течения и в 10–15 раз меньше
времени расчета по физической теории.
ВОПРОСЫ К ГЛАВЕ 7
1. Какие модели физических теорий пластичности можно отнести
к классу упруговязкопластических?
2. Проведите анализ мультипликативного разложения градиента
места Ли с позиций преобразования материальных бесконечно малых
отрезков из отсчетной конфигурации. Как определяется промежуточная
конфигурация?
3. Запишите соотношения для определения неупругих составляющих тензоров деформации скорости и вихря через скорости сдвигов.
4. Выведите соотношение для связи упругих составляющих тензоров деформации скорости и скорости деформаций Коши–Грина.
5. Какие материалы называются упругими по Грину? Каков физический смысл упругого потенциала?
6. Приведите определение операции позиционного умножения.
Докажите, что объект, получаемый с помощью этой операции, является
тензором, определите его ранг.
7. Проверьте выполнение аксиом ТОС для соотношения (7.39).
8. Приведите физические соотношения для скоростей сдвигов (за
счет скольжения дислокаций).
9. Приведите кинематические и определяющие соотношения для
кристаллита, применяемые в упруговязкопластических моделях.
10. Предложите алгоритм численной реализации упруговязкопластической модели кристаллита.
11. Проанализируйте известные вам законы упрочнения. Проведите их сравнительный анализ.
12. Приведите соотношения для связи тензора напряжений Коши,
взвешенного тензора Кирхгоффа, первого и второго тензоров Пиола–
Кирхгоффа, установите их физический (энергетический) смысл.
13. Приведите соотношения, используемые для осреднения напряжений в модели [64], проведите их анализ.
182
14. Какие гипотезы могут быть использованы для удовлетворения
условий совместности деформаций кристаллитов?
15. Проанализируйте модель «механического порогового напряжения» (MTS – mechanical threshold stress), предложенной Фоллансби и
Куксом. Укажите недостатки этой модели.
16. Перечислите известные вам модели ротации решетки. Как согласно им преобразуются векторы, задающие СС (n(k), b(k))? Используя
какое предположение, можно записать соотношения:
o (k )
o (k )
bˆ ( k ) = f e ⋅ b , nˆ ( k ) = n ⋅ f e−1 ?
17. Проведите физический анализ соотношения для определения
скоростей сдвигов (7.82).
18. На основе какого подхода построена модель E.P. Busso &
G. Cailletaud?
19. Изложите суть модели «текстурных компонентов».
20. В чем состоят основные отличия градиентных физических теорий от классических?
21. Сформулируйте основные положения модели «структурных
элементов».
183
ГЛАВА 8. СТРУКТУРА И АЛГОРИТМЫ
РЕАЛИЗАЦИИ МНОГОУРОВНЕВЫХ МОДЕЛЕЙ
8.1. НАИБОЛЕЕ РАСПРОСТРАНЕННАЯ СХЕМА
ПОСТРОЕНИЯ МНОГОУРОВНЕВЫХ МОДЕЛЕЙ,
ИХ СТРУКТУРА И КЛАССИФИКАЦИЯ
С конца 70-х – начала 80-х годов прошлого столетия начинаются
интенсивные исследования текстурообразования и влияния текстуры на
свойства материалов с применением как физических теорий пластичности, так и экспериментальных методов [9, 77, 175 и др.]; краткий обзор
способов описания текстуры и современные эффективные методы описания интересующийся читатель может найти, например, в [153]. Обширный обзор экспериментальных данных, теоретических методов
и результатов анализа текстурообразования (главным образом – в процессах прокатки) с 60-х годов ХХ века по настоящее время содержится
в статье [123]; особое внимание уделяется механизмам формирования
в ГЦК-металлах двух типов текстуры прокатки – «текстуры меди»
и «текстуры латуни».
Классификационными признаками для подразделения многоуровневых моделей на классы могут быть выбраны: а) число уровней, включенных в рассмотрение, и связанный с уровнями выбор «элементарной
ячейки» (в дальнейшем будем называть ее «элементом»); б) модель (гипотеза) связи однотипных характеристик различных уровней; в) физические теории, положенные в основу нижних масштабных уровней.
В настоящее время подавляющее большинство используемых многоуровневых моделей относится к двухуровневым (макро- и мезоуровни),
в качестве элемента мезоуровня в таких моделях, как правило, выбирается зерно; в последние годы появляются трехуровневые модели (с добавлением микроуровня).
При моделировании конкретного процесса число рассматриваемых
уровней определяется исследователем. Например, при моделировании
неупругого деформирования поликристаллических металлов иерархию
масштабных уровней можно определить следующим образом: макроуровень – мезоуровень (уровень кристаллита (зерна, субзерна, фрагмента)) –
микроуровень (дислокационная структура) (рис. 8.1). Следует отметить,
184
Рис. 8.1. Схематичное представление иерархии масштабных
уровней при моделировании поликристаллических металлов
(слева направо: макроуровень, мезоуровень, микроуровень)
что на макроуровне следует выделить подуровень представительного
макрообъема, которым исследователи оперируют при формулировке
конститутивной модели материала, и уровень макроконструкции, реального физического тела, обрабатываемой заготовки и т.д., для которых
требуется ставить и решать соответствующую краевую задачу. В настоящей работе внимание будет сосредоточено именно на подуровне представительного макрообъема.
О гипотезах связи однотипных переменных разных уровней
Весьма важным отличительным признаком многоуровневых моделей, во многом определяющим «качество» моделей, является гипотеза
о связи характеристик различных уровней (иногда говорят о гипотезе
осреднения, или о гипотезе агрегирования – «объединения» элементов
нижележащего уровня в элемент более высокого масштабного уровня).
Наиболее распространенной в ФТП является гипотеза Фойгта (в некоторых работах ее называют гипотезой Тейлора), согласно которой полные деформации (или деформации скорости) зерен, входящих в поликристаллический агрегат, полагаются равными деформации (деформации скорости) представительного макрообъема, задаваемой условиями
нагружения или решением соответствующей краевой задачи. Иначе говоря, передача воздействий с макроуровня на мезоуровень при принятии этой гипотезы осуществляется кинематическим способом.
Другой распространенной гипотезой является гипотеза Рейса (называемая в некоторых работах гипотезой Закса), в соответствии с которой однородными по поликристаллическому агрегату являются напряжения. Таким образом, применение этой гипотезы соответствует силовому (статическому) способу передачи воздействий.
Гипотеза Фойгта дает так называемую верхнюю оценку (интенсивность напряжений получается наибольшей из всех гипотез), гипотеза
Рейса – нижнюю оценку. Следует отметить, что применение той или
185
иной модели связи уровней может вести к качественно отличающимся
результатам; так, в работе [123] указывается, что применение гипотезы
Фойгта при исследовании процесса прокатки дает текстуру меди, а гипотезы Рейсса – текстуру латуни. Конечно, ни одна их этих гипотез не
отражает реальные взаимодействия зерен в поликристалле. При этом
в таких моделях обычно не учитывается взаиморасположение элементов-зерен в поликристалле. В связи с этим значительное число статей
посвящено поиску новых способов соединения подмоделей монокристаллов в модель поликристалла. Согласно одному из таких способов
параметры процесса предлагается усреднять по результатам расчета
с применением каждой из указанных гипотез по отдельности. В работе
[139] вводится взвешенное осреднение всех параметров процесса (напряжений, деформаций скорости, скорости поворота решетки), полученных при применении указанных гипотез. Весовой коэффициент w
полагается назначаемой величиной в пределах от 0 (соответствует гипотезе Фойгта) до 1 (гипотезе Рейса). Наряду с взвешенным осреднением
полученных по отдельности результатов с использованием гипотез
Фойгта и Рейса (линейная модель) предлагается более сложная нелинейная модель осреднения. Последняя основана на минимизации функции r = (1 – w)rd + wrσ , где rd и rσ соответственно отклонения нормы локальной деформации скорости от средней и локальных напряжений
(в зернах) от средних по поликристаллическому агрегату. Минимизация
функции r позволяет определить нелинейную зависимость локальных
скорости деформаций и напряжений от соответствующих осредненных
величин. В статье отсутствует обоснование выбора критерия «оптимального решения».
Е. Кренером было предложено линейное соотношение, связывающее локальные отклонения девиаторов напряжений s ( n ) и пластических
деформаций e( n ) p от осредненных s , e p :
(
) ∑
s − s( n ) = m( n ) e( n ) p − e p ,
,
n
где m( n ) – константа материала для n-го зерна. Нетрудно видеть, что полученное соотношение может быть проиллюстрировано структурномеханической моделью, состоящей из параллельно соединенных «цепо186
чек», каждая из которых содержит последовательно соединенные упругий и пластический элементы с различными характеристиками.
В ФТП используются и более сложные подходы к объединению
кристаллитов в поликристаллический агрегат. Один из них, называемый
«самосогласованной моделью» (или «моделью среднего поля»), основан
на решении краевой задачи об одиночном включении (зерне) в матрице,
имеющей осредненные («эффективные») характеристики поликристалла.
Аналитические решения подобной задачи возможны только для включений канонической формы. Известные самосогласованные модели требуют весьма существенных вычислительных ресурсов, в связи с чем большая часть исследователей предпочитает более простые подходы. С современными самосогласованными моделями можно познакомиться,
например, в статье [132]; вариант самосогласованной модели для упруговязкопластической физической теории предложен в работе [154].
Дальнейшим развитием самосогласованных моделей являются так
называемые «прямые модели», в которых каждое зерно представляется
совокупностью одного или нескольких конечных элементов, для каждого из элементов напрямую используется та или иная физическая теория.
Понятно, что в этом случае вопроса о «согласовании» полей перемещений и вектора напряжений не возникает, непрерывность полей обеспечивается автоматически. Однако модели этого класса являются еще более ресурсоемкими, чем самосогласованные.
В связи с тем, что ограничения, накладываемые гипотезой Фойгта,
являются слишком жесткими, в начале 80-х годов прошлого века появились работы по модификации модели Тейлора, основанные на «релаксации» («смягчении») геометрических ограничений [175, 177–180]; рассматриваемые модели относятся к классу «промежуточных» (между
моделями, основанными на простых гипотезах (Фойгта, Рейсса), и самосогласованными моделями).
В связи с отмеченными выше недостатками моделей, в которых
принимается та или иная гипотеза однородности, появились «многозеренные» модели, предельным случаем которых являются прямые модели, основанные на МКЭ. К числу этих моделей относятся следующие
[177]: LAMEL, оперирующая с 2 зернами, GIA (8 зерен), новая модифицированная модель ALAMEL (advanced LAMEL). В этих моделях поля
деформаций теперь не являются однородными. Тем не менее во всех
этих трех моделях осредненные скорости деформаций приравниваются
средним предписанным скоростям деформации.
187
Интересный подход в развитие многозеренных моделей предлагается в [131], названный автором иерархической моделью. Для построения модели используется так называемое «бинарное дерево», представляющее собой совокупность узлов и ветвей, причем из каждого узла исходят две ветви нижележащего иерархического уровня. Высший узел
иерархии представляет модель поликристаллического агрегата; элементами низшего уровня («листьями») являются зерна, для элементов нижнего уровня применяется вязкопластическая теория [64].
В работе [97] рассматривается двухуровневая упругопластическая
модель. На мезоуровне применяется закон Гука в скоростной релаксационной форме; в качестве меры скорости напряжений использована
коротационная «решеточная» производная тензора напряжений Коши.
Скорость поворота решетки определяется упругой составляющей тензора вихря. Коэффициенты упрочнения по СС определяются плотностью
накопленных дислокаций; приведено эволюционное уравнение для
плотности дислокаций, учитывающее генерацию и аннигиляцию дислокаций. Для связи переменных мезо- и макроуровня принимается самосогласованная схема, основанная на решении Эшелби для эллиптического включения.
Представляется необходимым упомянуть о двухуровневом подходе, подробно изложенном в статьях [82, 120, 137, 143, 160], в основу
которого положено мультипликативное разложение градиента места
мезоуровня, и введен новый градиент места, который авторы называют
«тензором мезонесовместности» и полагают его ответственным за неоднородность упругопластических деформаций в представительном
макрообъеме.
В последние годы появились двухуровневые модели, в которых
делается попытка учета движения и взаимодействия дискретного множества дислокаций [86 и др.].
Для процессов деформирования поликристаллических тел, в частности, в процессах обработки металлов давлением, характерна существенная неоднородность распределения напряжений и деформаций по
области деформирования и, как следствие, значительное различие историй деформирования различных материальных подобластей, их мезои микроструктуры.
При использовании многоуровневого подхода исследуемая область
на макроуровне заменяется кусочно-однородным с точки зрения историй
нагружения аналогом, объем однородных подобластей не должен быть
188
меньше представительного объема (ПО) макроуровня. Для поликристаллических материалов в качестве ПО макроуровня [36, 37, 39, 51] обычно
принимается конгломерат, включающий не менее 7 структурных элементов мезоуровня по стороне куба (т.е. не менее 343 таких элементов).
В качестве структурных элементов мезоуровня можно рассматривать кристаллиты, представляющие собой модельный однородный материал. Под кристаллитом здесь понимается идеальный кристалл (с той
или иной решеткой), обладающий соответствующими анизотропными
упругими свойствами и набором систем скольжения: зерно, субзерно,
фрагмент зерна. Совокупность кристаллитов, образующих элемент макроуровня, будем называть поликристаллическим агрегатом (ПКА)
[1, 36, 37]. Для моделирования взаимодействия элементов ПКА можно
ввести дополнительные структурные элементы, описывающие границы
зерен. Ориентацию кристаллической решетки кристаллита удобно описывать тремя углами Эйлера (или кватернионом), задающими ориентацию кристаллографической системы координат (КСК) элемента относительно лабораторной системы координат (ЛСК), вводимой при постановке макрозадачи.
Поведение представительного объема макроуровня описывается
моделью макроуровня, учитывающей геометрические особенности макрозадачи и (или) особенности истории макровоздействий. Для ПКА разрабатывается соответствующая модель мезоуровня, учитывающая распределение ориентаций КСК кристаллитов, особенности границ между
кристаллитами (зернами, субзернами, фрагментами), число и расположение в решетке систем скольжения и т.п. В зависимости от поведения
материала на макроуровне может понадобиться несколько различных
моделей мезоуровня (например, только упругие, упругопластические
и/или упруговязкопластические модели).
Рассмотрим более подробно особенности макромодели. Параметрами процесса на макроуровне являются предписанные условия нагружения, которые и определяют эволюцию макронапряжений Σ (Х, t)
и/или макродеформаций, задаваемых некоторой мерой деформации
М (Х, t), и их скоростей. В качестве определяющих соотношений макроуровня удобно использовать анизотропный закон Гука в скоростной
релаксационной форме
Σ r = Π : (D − D p ) ,
(8.1)
189
где Π – тензор модулей упругости, D, D p – тензор деформации скорости и его пластическая составляющая, индекс r означает коротационную
производную на макроуровне. Пластическая составляющая скорости
деформации D и анизотропные упругие свойства Π в каждый момент
деформирования зависят от микроструктуры (а через нее – от истории
нагружения), являясь явными внутренними переменными модели макроуровня [38, 51]. Параметры элементов мезоуровня (ориентации КСК,
сопротивление сдвигу по системам скольжения (СС), скорости и накопленные сдвиги по СС) выступают в качестве неявных внутренних переменных макроуровня, а в качестве замыкающих уравнений, связывающих макро- и мезоуровень, используются соответствующие гипотезы
(Фойгта, Рейса, Кренера и др.).
В силу случайного (по тому или иному закону, определяемому по
экспериментальным данным) распределения начальных ориентаций
КСК кристаллитов набор значений неявных внутренних переменных
(например, ориентаций КСК), фигурирующих в модели ПКА, можно
считать выборкой случайных чисел. Тогда правила взаимодействия
макро- и мезоуровней сводятся к оценке математических ожиданий соответствующего параметра по имеющейся выборке. Например, скорость
пластических деформаций Dp (Х, t) представительного объема Х вычисляется (ориентационным) осреднением выборки скоростей пластических мезодеформаций d p для момента времени t по всем кристаллитам,
содержащимся в данном ПО [1]. При этом предполагается одинаковость
хода времени на макро- и мезоуровнях.
Для определения тензора упругих свойств Π на макроуровне
можно использовать выборку ориентаций Ф (Х, t) КСК кристаллитов
ПКА. Преобразуя компоненты тензора упругих свойств кристаллитов
из КСК в ЛСК, получаем выборку упругих свойств в ЛСК. Затем по
одной из моделей (Фойгта, Рейса или Хашина–Штрикмана [58]) находятся эффективные упругие свойства ПО в ЛСК, которые без дополнительных преобразований, связанных с поворотами, можно использовать в макрозадаче. По выборке Ф (Х, t) ориентаций КСК кристаллитов
ПКА можно построить функцию распределения ориентаций (ФРО),
являющуюся функцией плотности распределения случайной величины
(рис. 8.2).
p
190
Рис. 8.2. Схема двухуровневой модели
Как любая методика, двухуровневый подход имеет свои достоинства и недостатки. К достоинствам подхода можно отнести:
♦ возможность моделирования мезоструктуры поликристалла
(распределение ориентаций КСК зерен, их размер и форму);
♦ моделирование макросвойств, существенно зависящих от мезоструктуры, в частности, анизотропию упругих, пластических и прочностных свойств;
♦ относительно простой вид определяющих соотношений макроуровня (например, анизотропный закон Гука в релаксационной скоростной форме);
♦ возможность распараллеливания вычислений;
♦ применимость к решению существенно нелинейных задач.
Среди недостатков данного подхода можно отметить:
♦ невозможность получения аналитического решения задачи;
♦ большое количество неявных внутренних переменных для описания мезоуровня;
♦ большие запросы по ресурсам памяти и времени ЭВМ;
♦ высокую трудоемкость разработки программ для ЭВМ.
Многие из отмеченных недостатков носят непринципиальный характер, особенно в свете развития вычислительных технологий. Например, затраты машинного времени можно значительно снизить, используя распараллеливание алгоритма. При этом процедура распараллеливания может быть осуществлена как по отдельным элементам мезоуровня
(зернам, фрагментам и т.д.), так и по ПО макроуровня. Для распаралле191
ливания цикла по совокупностям ПКА удобно использовать технологию
MPI. Более трудоемким является распараллеливание внутренних по отношению к макроуровню циклов и методов решения СЛАУ макрозадачи. Возможно, что в этом случае больший выигрыш можно получить от
использования технологии OpenMP, ориентированной на многоядерность микропроцессоров.
8.2. СОГЛАСОВАНИЕ ОПРЕДЕЛЯЮЩИХ СООТНОШЕНИЙ
МАСШТАБНЫХ УРОВНЕЙ И КОНКРЕТИЗАЦИЯ НЕЗАВИСЯЩЕЙ
ОТ ВЫБОРА СИСТЕМЫ ОТСЧЕТА ПРОИЗВОДНОЙ
Одним из часто возникающих вопросов при построении двухуровневых (и в общем случае многоуровневых) моделей, использующих гипотезу Фойгта, является следующий: почему возникает излишняя информация о напряжениях на макроуровне? Действительно, с одной стороны, на макроуровне напряжения определяются из закона Гука
в скоростной релаксационной форме, в который входят осредненные
скорости неупругих деформаций, определяемые в модели мезоуровня.
С другой стороны, напряжения макроуровня можно определить осреднением напряжений мезоуровня. При этом нет оснований утверждать,
что вычисленные этими двумя способами напряженные состояния окажутся идентичными или хотя бы близкими.
Однако следует помнить, что на макроуровне остается нерешенной проблема выбора квазитвердого движения и соответствующей коротационной производной в законе Гука. Ниже приведен алгоритм выбора коротационной производной и выражения для скорости неупругой
деформации, обеспечивающие согласование определяющих соотношений различных масштабных уровней. Отметим, что с методической точки зрения достаточно провести согласование двух соседних масштабных уровней, для остальных все выкладки аналогичны.
Рассмотрим два соседних масштабных уровня некоторой многоуровневой модели, величины на верхнем масштабном уровне будем
обозначать большими буквами, на нижнем масштабном уровне – малыми. Для определенности примем, что определяющее соотношение верхнего уровня записывается в форме
Σ + A T ⋅ Σ + Σ ⋅ A = Π : ( D − Din ) ,
192
(8.2)
нижнего уровня (для каждого элемента из выборки, соответствующей
представительному объему верхнего уровня) – в виде
σ + aT ⋅ σ + σ ⋅ a = π : (d − din ) .
(8.3)
В соотношениях (8.2) и (8.3) не конкретизируется вид тензоров А,
а, характеризующих движение подвижных систем координат на верхнем и нижнем (для каждого элемента) масштабном уровне, относительно которой определяется квазитвердное движение, в частности, не накладывается условие антисимметричности; необходимым условием является только индифферентность ассоциированных с этими тензорами
производных от индифферентных тензоров – для обеспечения выполнения независимости определяющих уравнений (8.2), (8.3) от выбора системы отсчета.
Представим величины, входящие в описание напряженно-деформированного состояния элемента нижнего уровня, в виде суммы средних по представительному объему верхнего уровня величин и отклонений от этих средних:
π = < π > +π′,
σ = < σ > + σ′ ,
d in = < din > +din′ ,
d = < d > +d′ ,
a =< a > +a′ ,
(8.4)
где < ⋅ > – оператор осреднения, обладающий свойством:
< π′ >= 0, < σ′ >= 0, < d′ >= 0, < din′ >= 0, < a′ >= 0 .
(8.5)
Вид используемого оператора осреднения не обсуждается, например, может использоваться осреднение по объему или осреднение в пространстве ориентаций решеток кристаллитов, важно лишь выполнение
свойства (8.5) для используемого оператора осреднения.
Подставляя представление (8.4) в определяющее уравнение нижнего уровня (8.3), получаем соотношение:
< σ > +σ′ + ( < a T > +a T′ ) ⋅ (< σ > +σ′ ) + ( < σ > +σ′ ) ⋅ (< a > +a′ ) =
= (< π > +π′) : (< d > +d′ − < din > −din′ ).
(8.6)
193
Осредняя (8.6), имеем
< σ > + < a T > ⋅ < σ > + < a T′ ⋅ σ′ > + < σ > ⋅ < a > + < σ′ ⋅ a′ >=
= < π > : (< d > − < din >) + < π′ : (d′ − din′ ) > .
(8.7)
Примем, что согласование напряженно-деформированного состояния на различных уровнях заключается в равенствах:
Π =< π > , Σ = < σ > , D =< d > .
(8.8)
Соотношение (8.8) устанавливает, что эффективные свойства и характеристики напряженно-деформированного на верхнем масштабном
уровне должны быть в точности равны осредненным характеристикам
нижнего масштабного уровня.
При условии (8.8) соотношение (8.7) представляется в виде
Σ + < a T > ⋅Σ + Σ⋅ < a > + < a T′ ⋅ σ′ > + < σ′ ⋅ a′ >=
= Π : (D − < d >) + < π′ : (d′ − d in′ ) > .
(8.9)
in
Сравнивая (8.9) с формой определяющего уравнения на верхнем
уровне (8.2), можно получить уравнения, связывающие параметры
верхнего уровня A, Din с параметрами нижнего уровня, обеспечивающие выполнение условий согласования (8.8). При этом возникают, по
крайней мере, два возможных варианта определения A, Din .
В первом случае напрямую сопоставляются левые и правые части
соотношений (8.9) и (8.2), откуда следует связи параметров уровней:
A =< a > +Σ −1 ⋅ < σ′ ⋅ a′ >, A T =< aT > + < aT′ ⋅ σ′ > ⋅Σ −1 ,
(8.10)
Din =< din > − Π−1: < π′ : (d′ − din′ ) > .
(8.11)
Тензор A , определенный согласно (8.10), в общем случае не является антисимметричным, −A ≠ AT . В этом случае левую часть определяющего соотношения верхнего уровня (8.2) следует трактовать как
конвективную производную тензора напряжений Коши. Для рассматриваемых многоуровневых моделей можно показать, что полученная кон194
вективная производная является индифферентной по отношению к наложенному жесткому движению.
Необходимым и достаточным условием антисимметричности А
(при условии антисимметричности тензора а и симметрии тензоров напряжений макро- и мезоуровня) является следующее:
Σ −1 ⋅ < σ′ ⋅ a′ >=< aT′ ⋅ σ′ > ⋅Σ −1 .
(8.12)
При выполнении условия (8.12) на макроуровне конвективная
производная выродится в коротационную производную. Для получения
A =< a > необходимым и достаточным условием будет являться:
< aT′ ⋅ σ′ > + < σ′ ⋅ a′ >= 0 .
Отметим, что трактовка движения подвижной системы координат,
определяемой (8.10), достаточно сложна: во-первых, в данной системе
координат меняются длины базисных векторов и углы между ними, вовторых, характеризующий движение тензор А явно зависит от Σ.
В соотношении (8.11) к собственно неупругим деформациям добавляется член, характеризующий коррелированные (с флуктуациями
компонент тензора упругих характеристик) напряжения.
В случае использования в статистических моделях для передачи на
нижний уровень условий нагружения гипотезы Фойгта ( d = D , d′ = 0 )
связи (8.10)–(8.11) принимают вид:
A =< a > +Σ −1 ⋅ < σ′ ⋅ a′ >, A T =< aT > + < aT′ ⋅ σ′ > ⋅Σ −1 ,
(8.13)
Din =< din > + Π−1: < π′ : din′ > .
(8.14)
При использовании гипотезы Рейсса σ = Σ , σ ' = 0 соотношения
(8.10)–(8.11) принимают вид:
A =< a > ,
(8.15)
Din = < din > − Π−1: < π′ : (d′ − din′ ) > .
(8.16)
При антисимметричных тензорах a , т.е. при коротационных производных на нижнем масштабном уровне в законе (8.3), помимо вышеизложенного подхода для определения зависимостей A, Din от парамет195
ров нижнего уровня предлагается альтернативный вариант. При антисимметричном a соотношение (8.9) принимает вид:
Σ − < a > ⋅Σ + Σ⋅ < a > − < a′ ⋅ σ′ > + < σ′ ⋅ a′ >=
= Π : (D − < d >) + < π′ : (d′ − din′ ) > .
(8.17)
in
Анализируя левую часть соотношения (8.17), можно структуре
Σ − < a > ⋅Σ + Σ⋅ < a > дать трактовку коротационной производной Σ
(спин подвижной системы координат верхнего уровня определяется
как < a > ). Последний симметричный член в правой части
( − < a′ ⋅ σ′ > + < σ′ ⋅ a′ > ) можно трактовать как дополнительный вклад,
характеризующий скорость изменения напряжений за счет коррелированных разворотов элементов нижележащего уровня со своими отклонениями напряжений от среднего уровня. Перенося этот член
в правую часть, имеем:
Σ − < a > ⋅Σ + Σ⋅ < a >=
= Π : (D − < d in >) + < π′ : (d′ − d in′ ) > +(< a′ ⋅ σ′ > − < σ′ ⋅ a′ >).
(8.18)
Сопоставляя соотношения (8.18) и (8.2), можно определить связи
параметров уровней следующим образом:
A =< a >,
Din =< din > − Π−1: < π′ : (d′ − din′ ) > − Π−1: ( < a′ ⋅ σ′ > − < σ′ ⋅ a′ > ) .
(8.19)
(8.20)
При таком подходе на верхнем уровне получается коротационная
производная. Жесткую подвижную систему координат можно трактовать как некоторый трехгранник, вращающийся с угловой скоростью,
определяемой осредненным спином A =< a > .
В случае использования в статистических моделях для передачи на
нижний уровень условий нагружения гипотезы Фойгта ( d = D , d′ = 0 )
связи (8.19)–(8.20) принимают вид:
A =< a > ,
(8.21)
Din = < din > + Π−1: < π′ : din′ > − Π−1: ( < a′ ⋅ σ′ > − < σ′ ⋅ a′ > ) . (8.22)
196
При использовании гипотезы Рейсса σ = Σ , σ ' = 0 соотношения
(8.190)–(8.20) принимают вид:
A =< a > ,
(8.23)
Din =< din > − Π−1: < π′ : (d′ − din′ ) > .
(8.24)
Отметим, что несмотря на различные связи параметров (и различие в используемых физических трактовках), соотношения (8.13)–(8.14)
и соотношения (8.19)–(8.20) приводят к одному и тому же определяющему уравнению для напряжения Σ на верхнем уровне и выполнению
условий согласования (8.8).
Таким образом, условие согласования определяющих уравнений
различных масштабных уровней приводит к конкретизации вида определяющего соотношения на макроуровне (и, в частности, – вида независящей от выбора системы отсчета производной). По существу, соотношения низшего уровня «транспортируются» на верхний, разрешая вопрос корректной их формулировки для геометрически и физически
нелинейной задачи. Действительно, параметры определяющего соотношения верхнего уровня определены с целью выполнения (8.8), и при
реализации модели отсутствует необходимость интегрирования определяющего уравнения верхнего уровня – достаточно напрямую воспользоваться связью Π =< π > , Σ =< σ > , D =< d > . В то же время следует
отметить, что определяющие соотношения верхнего масштабного уровня необходимы для постановки и решения соответствующей краевой
задачи исследования деформирования макроскопического тела (детали,
конструкции).
При подобном подходе (как и при применении многоуровневого
подхода в целом), конечно, возникает вопрос о степени корректности
модели низшего уровня, восходящий к известной проблеме замыкания
эволюционных и определяющих уравнений (наиболее известным примером может служить проблема замыкания в теории турбулентности).
Суть проблемы состоит в том, что при формулировке физических уравнений для представительного объема некоторого уровня возникает необходимость введения параметров меньшего масштабного уровня
и эволюционных уравнений для них и так далее – вниз по «лестнице
масштабов». Можно отметить два наиболее употребительных подхода
к ее решению. В первом – феноменологическом – параметры, характе197
ризующие структуру на более низких масштабных уровнях, определяются функциональными уравнениями через параметры рассматриваемого уровня (например, как в модели турбулентности Рейнольдса) с последующей экспериментальной проверкой этих уравнений. Второй подход основан на построении иерархической совокупности моделей
нескольких масштабных уровней – многоуровневое моделирование.
Следует отметить, что в этом случае полностью избежать феноменологических соотношений, конечно, не удается, однако они записываются
для самого низкого масштабного уровня в принятой иерархической совокупности, для которого возможны конкретизация физических механизмов деформирования и детальное их описание с использованием известных положений физики твердого тела (это представляется существенно более простой задачей по сравнению с задачей установления
макрофеноменологических соотношений, одновременно учитывающих
состояние многомасштабной внутренней структуры и описывающих
многообразие всех механизмов неупругого деформирования).
Отметим, что предложенную методику легко применить и при
другой форме определяющих соотношений на мезо- и макроуровнях
для широкого класса конститутивных моделей с использованием
внутренних переменных (когда определяющие соотношения являются дифференциальными, например, для соотношений максвелловского типа).
Для двухуровневой модели поликристаллических металлов используются следующие связи (конкретизация замыкающих соотношений макроуровня):
Ω =< ω > +Σ −1 ⋅ < σ′ ⋅ ω′ > ,
(8.25)
Din =< d in > + Π−1: < π′ : d in′ >
(8.26)
либо (согласно второму подходу)
Ω =< ω > ,
(8.27)
Din =< din > + Π−1: < π′ : din′ > − Π−1: ( < ω′ ⋅ σ′ > − < σ′ ⋅ ω′ > ). (8.28)
198
8.3. КЛАССИФИКАЦИЯ ВНУТРЕННИХ ПЕРЕМЕННЫХ И УРАВНЕНИЙ
КОНСТИТУТИВНОЙ МОДЕЛИ НА ПРИМЕРЕ ДВУХУРОВНЕВОЙ
УПРУГОВЯЗКОПЛАСТИЧЕСКОЙ МОДЕЛИ
На макроуровне рассматривается представительный объем поликристаллического металла, состоящий из совокупности кристаллитов –
элементов мезоуровня.
Конститутивная модель материала на макроуровне принимается в виде:
Σ r ≡ Σ + ΩT ⋅ Σ + Σ ⋅ Ω = Π : De = Π : ( D − Din ),
Ω = Ω ( ω (i ) , π(i ) ) , i = 1,..., N ,
Π = Π(π(i ) , o (i ) ), i = 1,..., N ,
in
in
in
D = D (d (i ) , π(i ) ), i = 1,..., N ,
(8.29)
где Σ – тензор напряжений Коши, Π – тензор модулей упругости, D,
De , Din – тензор деформации скорости, его упругая и неупругая составляющая соответственно, индекс r означает независящую от выбора системы отсчета производную, Ω – тензор, описывающий движение подвижной
системы координат, относительно которой определяется собственно деформационное движение [31] на макроуровне. Стоит акцентировать внимание на том, что вопрос однозначного введения независящей от выбора
системы отсчета производной, т.е. корректного разложения движения на
квазитвердое и собственно деформационное – один из наиболее трудных
в нелинейной механике деформируемого твердого тела [31] и, по мнению
авторов, не решен до сих пор. Для определения Ω предлагается использовать условие согласования определяющих соотношений на различных масштабных уровнях.
Таким образом, неупругая составляющая деформации скорости Din ,
эффективные анизотропные упругие свойства Π и описывающий движение подвижной системы координат тензор Ω являются явными внутренними переменными модели макроуровня, в каждый момент зависят
от структуры на низших масштабных уровнях (а через нее – от истории
нагружения) и определяются с помощью модели мезоуровня (N – число
элементов мезоуровня, необходимых для статистического описания
представительного объема макроуровня, далее индекс элемента мезо199
уровня опускается). Параметры d in(i ) , π(i ) , ω (i ) представляют собой неявные внутренние переменные макроуровня.
Согласно вышеприведенной общей структуре конститутивной модели (8.29) 1 является уравнением состояния, а (8.29)2–(8.29)4 – замыкающими уравнениями, конкретизация которых является одной из основных целей работы (предлагаемый авторами подход описан в п 8.2);
в качестве эволюционных уравнений выступают соотношения модели
мезоуровня.
На мезоуровне (уровне кристаллита) в двухуровневых моделях неупругого деформирования поликристаллических металлов используется
следующая система соотношений:
σ r ≡ σ − ω ⋅ σ + σ ⋅ ω = π : de = π : (d − din ),
K
din = γ ( k )m ( k ) ,
∑
(S)
k =1
1/ n
τ( k )
(k )
(k )
(k )
(8.30)
γ = γ 0 ( k ) H (τ − τc ), k = 1,..., K ,
τ
c
(k )
(j )
(j )
τ c = f (γ , γ ), k , j = 1,..., K ,
соотношения для определения спина решетки ω, o ⋅ oT = ω,
d = D,
где σ – тензор напряжений Коши, π – тензор четвертого ранга упругих
свойств кристаллита, d, d e , din , ω – тензор деформации скорости, его
упругая и неупругая составляющие на мезоуровне и тензор спина КСК,
параметры π, d in , ω являются явными внутренними переменными мезоуровня, γk , τCk – накопленный сдвиг и критическое напряжение сдвига
k)
по k-й системе скольжения, m ((S)
– симметричная часть ориентационно-
го тензора k-й системы скольжения,
(k )
m (S)
= 1/ 2(b ( k )n ( k ) + n ( k )b ( k ) ) ,
b ( k ) , n ( k ) – единичные векторы в направлении вектора Бюргерса и нормали к плоскости скольжения; плоскости залегания и ориентация векторов Бюргерса, вдоль которых осуществляется трансляционное движение
(скольжение) краевых дислокаций, известны, ими являются наиболее
плотно упакованные плоскости и направления; так, в ГЦК-металлах
200
скольжение краевых дислокаций осуществляется в плоскостях системы
{111} по направлениям <110> [42], γ 0 , n – константы материала: характерная скорость сдвигов при равенстве касательных напряжений на СС
критическим и константа скоростной чувствительности материала [68],
τ ( k ) – действующее в k-й системе скольжения касательное напряжение,
τ ( k ) = b ( k )n ( k ) : σ , H ( ⋅) – функция Хэвисайда, K – число систем скольжения для рассматриваемого типа решетки. Отметим, что число систем
скольжения в данном случае равно удвоенному числу кристаллографических систем (в каждой плоскости противоположным направлениям
вектора Бюргерса соответствуют разные системы скольжения), т.е., например, для ГЦК-кристалла рассматривается 24 системы скольжения,
о – тензор текущей ориентации кристаллографической системы координат кристаллита относительно фиксированной лабораторной системы
координат. Скорости сдвигов, накопленные сдвиги, критические напряжения систем скольжения, ориентационный тензор КСК кристаллита
являются неявными внутренними переменными мезоуровня.
В качестве определяющего соотношения (уравнения состояния) на
мезоуровне выступает закон Гука в скоростной форме (8.30)1, при этом
учитывается геометрическая нелинейность: квазитвердое движение [31]
связывается с поворотом решетки (кристаллографической системы координат); в коротационной производной тензора напряжений Коши σ r
фигурирует тензор спина ω , характеризующий скорость вращения кристаллической решетки. Таким образом, напряжения характеризуют
именно упругие связи в зерне, связанные с изменением расстояний между соседними атомами. Различные модели поворота решетки подробно рассмотрены в п. 3.4 (см. также [57]).
Уравнение (8.30)2 – кинематическое соотношение, согласно которому неупругое деформирование кристаллита осуществляется за счет
сдвигов по системам скольжения.
Для определения скорости неупругого деформирования din в моделях поликристаллических металлов может быть использована [52, 53]
либо упругопластическая модель на базе модели Линя [21, 38, 42], либо
применяемая в настоящей работе упруговязкопластическая модель
(8.30)3, в которых din (как и ω ) связывается со скрытыми внутренними
переменными мезоуровня, характеризующими дислокационное скольжение – скоростями сдвигов
γ ( k ) по системам скольжения, k = 1,..., K
201
(K – число систем скольжения для рассматриваемого типа решетки),
критическими напряжениями τ (ck ) , тензором о текущей ориентации кристаллографической системы координат зерна относительно фиксированной лабораторной системы координат. Уравнение (8.30)4, описывает
эволюцию критических напряжений сдвига по системам скольжения.
Для передачи воздействия, производимого на макроуровне, на
низшие масштабные уровни в модели применяется гипотеза Фойгта, согласно которой тензоры деформации скорости для каждого кристаллита
совпадают с тензором деформации скорости макроуровня d = D .
В конститутивной модели мезоуровня соотношения (8.30)1 – уравнение состояния, (8.30)3–(8.30)4 – эволюционные уравнения, в качестве
замыкающих выступают уравнения (8.30)2, (8.30)5. Классификация
внутренних переменных макро- и мезоуровня сведена в табл. 8.1.
Таблица 8.1
Параметры конститутивной модели поликристаллических
металлов на разных масштабах
Уровень
Параметры
воздействия
Макроуровень
D (t )
Мезоуровень
(для каждого
кристаллита)
d (t ) = D (t )
Параметры, определяемые
на данном масштабном уровне
Явные внутренние Неявные внутренние Реакция
переменные
материала
переменные
in
Π d ω
Σ De
Π Din Ω
(для каждого
кристаллита)
Π din ω
τ(ck ) γ ( k ) , γ ( k ) o
σ de
8.4. МОДЕЛЬ ПОВОРОТОВ КРИСТАЛЛИЧЕСКОЙ РЕШЕТКИ,
УЧИТЫВАЮЩАЯ ВЗАИМОДЕЙСТВИЕ ЭЛЕМЕНТОВ МЕЗОУРОВНЯ
Как уже отмечалось выше (см. п. 3.4), наиболее распространенными среди исследователей моделями повоторов кристаллической решетки зерен (далее используется термин «ротации») являются две: модель
«полностью стесненного» поворота по Тейлору (3.18) и модель так называемого «материального поворота» (3.22). В качестве серьезного недостатка этих моделей следует отметить отсутствие в них учета микровзаимодействий соседних зерен в поликристалле; по существу, взаимодействие
кристаллитов осуществляется на макроуровне за счет используемой гипо202
тезы связи уровней (Фойгта, Рейсса и др.). При рассмотрении поликристаллических материалов, для которых можно пренебречь взаимодействием дислокаций в соседних зернах, например, при наличии «толстых»
границ аморфного строения в полимерных полукристаллических материалах, применение данных моделей достаточно обоснованно. Однако
для металлов экспериментально подтверждено (например, в работах
В.Е. Панина [54], В.В. Рыбина [34]), что существенную роль в поворотах
решетки играет несовместность скольжения дислокаций в соседних зернах.
Вообще говоря, в литературе можно найти достаточно много работ
по физическим теориям (в иностранной литературе – crystal plasticity),
в которых так или иначе вводятся вращательные степени свободы для
кристаллической решетки и строятся кинетические уравнения для поворотов. К принципиальным сложностям таких моделей следует отнести
как физическую непрозрачность описания поворотов и причин, приводящих к ним, так и неучет влияния на разворот данного зерна несовместности движения дислокаций в рассматриваемом и в соседних зернах.
К одной из немногих работ по физическим теориям пластичности, в которых рассматривается вопрос описания разворотов в поликристалле
при помощи явного введения моментных напряжений, относится работа
[111], кратко изложенная в п. 3.3. Анализируя рассмотренную работу,
остановимся на тех моментах, которые не позволяют использовать ее
в данном исследовании:
♦ в работе не приводится физическое обоснование соотношения
(3.16) для моментных напряжений, неявно предполагается независимость моментных напряжений от несовместности пластических деформаций в соседних зернах, не указывается физический объем, к которому
приложены моментные напряжения;
♦ рассматривается поворот, связанный с мгновенной скоростью
вращения материальных отрезков, в данный момент образующих ортогональную тройку, совпадающую с главными осями меры скорости деформации, пренебрегается упругими искажениями решетки;
♦ не учитывается пороговость необратимых разворотов, что приводит к появлению поворотов элементов уже при малых деформациях.
Введем дополнительные термины, необходимые для описания эволюционирующей структуры поликристалла, которые будут использоваться в дальнейшем. Под «элементом ротации» (ЭР) будем понимать
любую структурную составляющую микроструктуры (зерно, субзерно,
фрагмент) или их совокупность, способную к разворотам как целое, с со203
хранением (с приемлемой точностью) правильного кристаллического
строения решетки составляющих, их взаиморасположения и взаимоориентации (рис. 8.3). Здесь следует отметить, что, вообще говоря, размер
ЭР, претерпевающего разворот, заранее не известен. Более того, эксперименты показывают, что с увеличением интенсивности деформаций характерные размеры разворачивающихся элементов структуры изменяются [10, 28, 34]. Для определения ЭР в каждый момент деформирования
в работе вводится еще один тип структурных элементов, которые в каждый момент деформирования могут образовывать ЭР (по определенному
алгоритму, о котором будет изложено ниже). Под «зерном» будем понимать наименьший объем материала, который (по крайней мере, на начальный момент деформирования) с приемлемой точностью можно считать монокристаллическим телом. Под «фрагментами зерна» будем понимать микрообласти материала, разориентированные относительно друг
друга на углы порядка нескольких минут или градусов [34]. Надо отметить, что введение понятия «элемент ротации» не подменяет понятий
«зерно» и «фрагмент зерна», так как, вообще говоря, в произвольный момент деформирования в качестве ЭР могут выступать и фрагмент,
и группа фрагментов, и зерно (и даже совокупность зерен).
Рис. 8.3. К выделению структурных элементов
В работах [40, 41] одной из причин разворотов решетки зерен
(кроме так называемого «материального» поворота) считается несовместность сдвигов по системам скольжения в соседних зернах (моделирующих, в свою очередь, движение дислокаций). Тогда скорость изменения вектора поверхностного момента, действующего на часть границы анализируемого зерна (фрагмента зерна) в результате сопротивления
204
переходу дислокаций из анализируемого зерна (фрагмента) в соседние
( m = 1, ..., M ), можно определить как сумму
mr = ∑ (mr ) ,
M
m
(8.31)
m =1
где ( ⋅) – соответствующая коротационная производная (вопрос о ее выr
боре обсуждается ниже), ( m r ) – составляющая скорости вектора моменm
та, обусловленная несовместностью сдвига в данном фрагменте со сдвигами в соседнем m-м фрагменте, М – число соседних фрагментов.
Эволюция вектора-момента m m определяется следующим соотношением:
(m )
r m
m
= λ N × l p T ⋅ N ,
(8.32)
где λ – экспериментально определяемый (в Па ⋅ м ) параметр, N –
внешняя для анализируемого фрагмента единичная нормаль к границе
m
с соседним фрагментом, l p T – скачок пластической составляющей
градиента скорости, определяемый согласно соотношению
K
K
i
j
l p T = ∑ γ i ni bi − ∑ γ j ( m )n j ( m )b j ( m ) ,
m
(8.33)
где γ i , γ j ( m ) – скорости сдвигов, bi , b j ( m ) – единичные векторы по направлениям векторов Бюргерса, ni , n j ( m ) – нормали для систем скольжения в исследуемом и соседнем фрагментах соответственно, K – число
систем скольжения (для ГЦК-кристалла с учетом удвоения – 24).
Вкратце проанализируем соотношение, следующее из (8.32)–(8.33):
K
K
i
j
m r = µ N × (∑ γ i n i b i − ∑ γ j ( m ) n j ( m ) b j ( m ) ) ⋅ N .
(8.34)
1) В соотношении (8.34) явно учитываются несовместность сдвигов и ориентация границы.
2) Рассмотрим случай отсутствия сдвигов в соседнем зерне (что
согласно модели эквивалентно нахождению зерна в жесткой оболочке).
205
Для простоты будем рассматривать случай, когда активна одна СС (индекс отбросим). Тогда m = µ γ N × nb ⋅ N .
Рис. 8.4. Схема для пояснения N = k 1 , b = k1 , n = k 2
Например, для случая, изображенного на рис. 8.4,
m = k1 × γ k 2k1 ⋅ k1 = µ γ k 3 . При γ > 0 в верхней части границы вследствие прохождения дислокаций по СС возникает избыток атомов, в нижней части – недостаток, поэтому скорость момента направлена против
часовой стрелки.
3) Векторную часть (8.34), порождаемую операцией векторного умножения « N × », можно трактовать как вектор линии дислокации ориентационного несоответствия [34], залегающей в границе. Логично, что скорость момента, действующего на зерно, направлена вдоль этой линии.
4) Скалярные произведения « ⋅N » характеризуют, каким образом
сдвиг по СС ориентирован по отношению к границе. Например, в случае, когда направление сдвига по СС перпендикулярно нормали к границе, соответствующая составляющая будет нулевой, что согласуется
с физическим анализом.
Соотношение (8.34) перекликается с приведенным в работе [34]:
(
)
d
d
∆θsnn′ = −
N nn′ × ε p ′ ⋅ N nn′ ,
nn
dε
dε
(8.35)
где ∆θsnn′ – вектор разориентации, ε – длина дуги деформации, N nn′ – норKa
Ka
k=1
i=1
маль к границе между зернами n и n’, ε p ′ = ∑ M ( k ) n γ ( k ) n −∑ M (i ) n' γ (i ) n' –
nn
206
разность пластических составляющих деформаций в зернах n и n’. Однако
имеется ряд отличий между предлагаемым соотношением (8.34) и содержащимся в цитируемой работе (8.35):
– в соотношении (8.35) используется симметричный тензор деформации, что представляется не совсем корректным с точки зрения
описания движения дислокаций (вторая часть ориентационного тензора
не соответствует реальной СС),
– соотношение (8.35) не предполагает пороговости: изменение
вектора начинается, как только начинается пластическое деформирование в соседних зернах, что также не соответствует физике процесса. Для
обеспечения пороговости «решеточного» поворота вводится силовой
фактор – моментные напряжения, чтобы затем явно задать критерий
реализуемости решеточного поворота в замыкающем уравнении для
связи спина решетки с моментными напряжениями.
При этом стоит отметить, что в работе [34] делается попытка
обоснования соотношения (8.35) на основе физических и математических посылок: вводятся дислокации ориентационного несоответствия,
тензор их плотности ∆B ( nn' ) , выводится уравнение для изменения B ( nn' )
в зависимости от деформации, затем автор приходит к соотношению
(8.35). Соответствующие выкладки были проведены как для соотношения (8.35), так и для соотношения (8.34). Несмотря на ряд возникших
при этом вопросов, такой путь – построение феноменологических моделей путем анализа физики процесса на меньших масштабных уровнях –
представляется продуктивным.
Определим вид коротационной производной, которую необходимо применить в соотношениях (8.31)–(8.32) для соблюдения принципа материальной индифферентности. Пусть на элемент ротации, а
также на все фрагменты, которые его окружают, накладывается поворот как жесткого целого. В этом случае очевидно, что и вектор (тензор) моментных напряжений испытает такой же поворот. Также отметим, что при расчетах для отдельного фрагмента все величины
(деформации скорости, напряжения, тензор упругих свойств, сдвиги
по системам скольжения, моменты) определяются с точки зрения наблюдателя, находящегося в кристаллографической системе координат;
к этой же системе координат жестко «привязан» материал фрагмента.
Поскольку вращение КСК осуществляется по отношению к лабора207
торной системе координат (ЛСК) как жесткого целого (вместе с материалом), то для удовлетворения принципа материальной индифферентности необходимо выбрать тип коротационной производной,
«привязанной» к угловой скорости вращения кристаллической решетки, следовательно,
mr = m − Ω ⋅ m + m ⋅ Ω ,
(8.36)
где Ω – тензор спина кристаллической решетки фрагмента, определяемый в каждый момент деформирования как тензор, ассоциированный
с вектором угловой скорости вращения решетки ω , Ω = − Є ⋅ ω , Є –
тензор Леви–Чивита.
Тогда окончательно для поверхностных моментов имеем:
( m r ) = λ N × (∑ γ i n i b i − ∑ γ j ( m ) n j ( m )b j ( m ) ) ⋅ N .
m
K
K
i
j
(8.37)
Результирующий вектор-момент определяется по формуле
M
m = ∑ mm ,
(8.38)
m =1
где по индексу m нумеруются составляющие момента на отдельных
фасетках данного элемента ротации (кристаллита).
Скорость поворота (спин) решетки ω представляется суммой двух
составляющих. Первая составляющая ω1 описывает поворот решетки
вместе с материалом зерна при наложенном кинематическом воздействии, назовем эту составляющую «материальным поворотом». Связывая
материальный поворот с ортогональным тензором, сопровождающим
упругую деформацию, данную составляющую предлагается определять
как ω1 = w r e . Вторая составляющая скорости поворота ω 2 («решеточный поворот») характеризует ротацию собственно решетки кристаллита, обусловленную взаимодействием с окружением.
Составляющая спина решетки ω 2 определяется соотношением:
208
1 r 1
r
A µ + H µ, при µ = µ c и µ : µ ≥ 0,
ω2 =
1 µ r , в противном случае,
A
(8.39)
µ = µ : µ – интенсивность тензора моментных напряжений,
где
t
Ψ=
∫
ω : ω dτ – накопленный решеточный поворот, µ C – текущее
τ =0
критическое моментное напряжение, определяемое экспериментально,
µ C =µ C (Ψ ) . Тензор моментных напряжений µ ассоциирован с вектором
1
поверхностного момента m ( m = Є : µ, µ = −Є ⋅ m ).
2
Согласно (8.39) составляющая спина решетки ω 2 характеризует
вращение решетки кристаллита, инициированное несовместностью
движения дислокаций в соседствующих кристаллитах.
8.5. АЛГОРИТМ РЕАЛИЗАЦИИ ДВУХУРОВНЕВОЙ
УПРУГОВЯЗКОПЛАСТИЧЕСКОЙ МОДЕЛИ
Рассмотрим алгоритм численной реализации двухуровневой модели, представленной в п. 8.3; для определенности в качестве связей используются соотношения (8.27)–(8.28), рассматривается кинематическое
ˆ (t ) задан (при моделиронагружение представительного объема, т.е. ∇V
вании процесса одноосного или двухосного нагружения в процедуру
добавляется корректировка D для обеспечения соответствующего напряженного состояния [48]).
Математически задача сводится к интегрированию системы обыкновенных дифференциальных уравнений. Для интегрирования выбрана
неявная схема Адамса–Моултона второго порядка. Известно, что неявные схемы обладают большей устойчивостью по сравнению с явными
схемами; при этом схема Адамса–Моултона хорошо подходит для решения обыкновенных дифференциальных уравнений с сильно нелинейными правыми частями, что имеет место в рассматриваемом случае.
209
Разностный аналог метода Адамса–Моултона второго порядка для
dy
дифференциального уравнения
= f ( x, y ) на шаге t ∈ [tk , tk +1 ], h = tk +1 − tk
dx
реализуется согласно следующему уравнению [5]:
yk +1 = yk +
h
( f ( xk , yk ) + f ( xk +1 , yk +1 ) ) .
2
(8.40)
Поскольку для рассматриваемой системы уравнений аналитическое решение системы типа (8.40), как правило, не существует, то yk +1
предлагается находить с помощью итерационного процесса вида:
h
yk( s++11) = yk + f ( xk , yk ) + f ( xk +1 , yk( s+)1 ) , s = 0,1, 2,...
2
(8.41)
Завершение итерационного процесса производится при выполнении
условия yk( s++11) − yk( s+)1 ≤ ε, ε > 0 – заданное малое число. Сходимость про2
, K – конK
станта в условии Липшица для правой части исходного дифференциального уравнения.
В качестве начального приближения выбирается yk(0)+1 = yk . Тогда
цесса наблюдается при малых шагах интегрирования h <
на первой итерации получаем решение
h
yk(1)+1 = yk + f ( xk , yk ) + f ( xk +1 , yk ) ≈ yk + h ⋅ f ( xk , yk ) ,
2
соответствующее использованию явной схемы Эйлера, имеющей первый
порядок аппроксимации. Далее,
h
yk(2)+1 = yk + f ( xk , yk ) + f ( xk +1 , yk(1)+1 ) =
2
h
= yk + f ( xk , yk ) + f ( xk +1 , yk + h ⋅ f ( xk , yk ) ) ,
2
(8.42)
что для рассматриваемого одномерного случая соответствует схеме
Рунге–Кутта второго порядка
210
yk +1 = yk + h (1 − α ) f ( xk , yk ) + α ⋅
h
h
f xk + , yk +
f ( xk , yk )
2α
2α
1
.
2
На третьей итерации можно ожидать повышения порядка аппроксимации до третьего и т.д. Однако необходимо иметь в виду, что сама
исходная схема Адамса–Моултона (8.40) имеет второй порядок, а значит, целесообразно ограничивать общее число итераций двумя (так как
точность выше второго порядка никак не достижима только за счет более точного определения yk +1 как решения (8.40)). Алгоритм реализации
с коэффициентом α =
схемы Адамса–Моултона для системы уравнений аналогичен приведенному выше с заменой скалярных переменных на векторные ( y → { y} ) .
Согласно вышеприведенному подходу итерационного определения значений неизвестных на конец шага из схемы Адамса–Моултона
второго порядка получаются следующие соотношения для определения
вектора неизвестных на конец шага { yk +1} :
{ yk +1} = { yk } + ({ f ( xk , y1k ,…, ynk )} +{ f ( xk +1, y1k (1) ,…, ynk (1) )}) =
h
2
h { f ( xk , y1k ,…, ynk )} +
= { yk } +
2 f ( xk +1, y1k + h ⋅ f1 ( xk , y1k ,…, ynk ) ,…, ynk + h ⋅ fn ( xk , y1k ,…, ynk ) )
{
}
(8.43)
,
где использованы обозначения:
y1 ( x )
y2 ( x )
{ y} =
– вектор неизвестных,
...
yn ( x )
f1 ( x, y1 ( x ) ,..., yn ( x ) )
f 2 ( x, y1 ( x ) ,..., yn ( x ) )
{f}=
– вектор правой части.
...
f ( x, y ( x ) ,..., y ( x ) )
1
n
n
211
Схему (8.43) также называют схемой «предиктор-корректор»:
в соответствии с ней на первой итерации каждого шага по времени скоростные соотношения интегрируются по явной схеме Эйлера (вычисляются y1k (1) ,… , ynk (1) ), на второй итерации, по сути, происходит уточнение
найденных по схеме Эйлера неизвестных.
Рассмотрим процедуру интегрирования уравнений модели на некотором временном шаге t ∈ [tk , tk +1 ] . На начало шага t = tk известны
значения параметров отклика и всех внутренних переменных: напряжения макроуровня Σ ( k ) ; для каждого кристаллита: σ ( k ) , γ ((ik)) , τ ((ik)) , τC( k()i ) ,
i = 1,..., K , µ ( k ) , o ( k ) , N m ( k ) , m = 1,..., M , Ψ ( k ) , π, β, b (i ) , n (i ) , m (i ) ; также
ˆ v(t ) , для простоты рассмотрения алгоритма
задано нагружение ∇
примем
нагружение
постоянным
об
на
шаге
об
ˆ v =∇
ˆ v (t ) = ∇
ˆ v(t ) ,
∇
k
k +1
об
ˆ V) .
D = D(tk ) = D(tk +1 ) , D = sym(∇ˆ V ) , W = W(tk ) = W(tk +1 ) , W = skew(∇
Необходимо в результате интегрирования уравнений двухуровневой
модели на шаге t ∈ [tk , tk +1 ] определить значения вышеперечисленных
переменных на конец временного шага t = tk +1 .
I. На первой итерации выполняется интегрирование системы уравнений с помощью явной схемы Эйлера.
Вычисления на мезоуровне
1. В цикле по кристаллитам осуществляются вычисления скоростей сдвигов, скоростей критических напряжений, определяются сдвиги
и критические напряжения на конец шага для первой итерации (индекс
кристаллита опущен).
1а) Определяются скорости сдвигов и сдвиги на конец шага:
γ
( k )(1)
(i )
d
= γ0 H ( τ
in ( k )(1)
(k )
(i )
−τ
(k )
c( i )
τ ((ik))
)τ
(k )
c( i )
1/ m
sign ( τ ((ik)) ) , τ ((ik)) = b ((ik))n ((ik)) : σ ( k ) , i = 1,..., K ,
24
= ∑ γ ((ik))(1)m ((ik)) ,
i =1
γ
212
( k +1)(1)
(i )
= γ ((ik)) + ∆t γ ((ik))(1) ,
i = 1,..., K .
1б) Находятся скорости критических напряжений и критические
напряжения на конец шага:
(k )
( k )(1)
τ (c(ki)(1)
) , i = 1,..., K ,
) = f ( γ (i ) , γ (i )
τ (c(ki+)1)(1) = τ (c(ki)) + ∆t τ (c(ki)(1)
) , i = 1,..., K .
2. В цикле по кристаллитам осуществляются вычисления скоростей и значений на конец шага остальных переменных мезоуровня для
первой итерации (индекс кристаллита опущен). Разделение на два цикла
выполнено для реализации предлагаемой модели поворота, где спин
решетки кристаллита зависит как от скоростей неупругих сдвигов в нем,
так и от скоростей неупругих сдвигов в соседних зернах.
2а) Определяется скорость моментных напряжений относительно КСК:
K
K
(m r ) m ( k )(1) = µ q m ( k ) × ∑ γ ((ik))(1)n ((ik))b ((ik)) − ∑ γ (mj()k )(1) n (mj()k )b (mj()k ) ⋅ q m ( k ) ,
j
i
m = 1,..., M ,
(µ r ) m ( k )(1) = −Є ⋅ (m r ) m ( k )(1) , m = 1,..., M ,
M
(µ r )( k )(1) = ∑ (µ r ) m ( k )(1) .
m=1
2б) Находится «решеточная» составляющая поворота ω 2 :
ω 2 ( k )(1)
1 r ( k )(1) 1 ( k )
+ µ , при µ ( k ) = µ c ( k ) и µ ( k ) : (µ r )( k )(1) ≥ 0,
A (µ )
H
=
1 (µ r )( k )(1) в противном случае.
A
2в) Определяются «материальная» составляющая поворота и полный спин решетки:
ω1( k )(1) =
K
1 ˆ T ˆ
1
(∇v − ∇v ) − ∑ γ i((i )k )(1) (b (( ik)) n (( ik)) − n (( ik)) b (( ik)) ) − (β ( k ) : σ ( k ) ) ⋅ d in ( k )(1) +
2
i =1 2
+d in ( k )(1) ⋅ (β ( k ) : σ ( k ) )
ω ( k )(1) = ω1( k )(1) + ω 2 ( k )(1) .
213
2г) Находится скорость моментных напряжений относительно ЛСК:
M
m ( k )(1) = ω ( k )(1) ⋅ m ( k ) − m ( k ) ⋅ ω ( k )(1) + ∑ (m r ) m ( k )(1) ,
m =1
µ ( k )(1) = −Є ⋅ m ( k )(1) .
2д) Определяются моментные напряжения на конец шага:
µ ( k +1)(1) = µ ( k ) + ∆t µ ( k )(1) .
2е) Находятся скорости изменения нормалей и их ориентация на
конец шага:
ˆ v ⋅ q m ( k ) , m = 1,..., M ,
q m ( k )(1) = (q m ( k ) ⋅ D ⋅ q m ( k ) )q m ( k ) − ∇
q m ( k +1)(1) = q m ( k ) + ∆t q m ( k )(1) , m = 1,..., M .
2ж) По тензору спина определяется соответствующий вектор скорости поворота:
1
φ ( k )(1) = Є : ω ( k )(1) .
2
2з) Находится ориентационный тензор (совмещающий кристаллографическую и лабораторную системы координат) после первой итерации путем последовательного определения:
– оси поворота
e( k )(1) =
φ ( k )(1)
,
| φ ( k )(1) |
– угла поворота
∆φ ( k )(1) = ∆t | φ( k )(1) | ,
– тензора поворота за шаг
∆R( k )(1) = (cos(∆φ( k )(1) ) + 1)e( k )(1)e( k )(1) + cos(∆φ( k )(1) )I + sin(∆φ( k )(1) ) e( k )(1) × I ,
– ориентационного тензора
O ( k +1)(1) = ∆R ( k )(1) ⋅ O ( k ) .
Примечание. Тензор O связывает компоненты произвольного вектора в кристаллографической aiКСК , i = 1, 2,3 , и лабораторной системе
координат aiЛСК , i = 1, 2,3 :
214
aiКСК = OijЛСК a ЛСК
, i = 1, 2,3 ,
j
a ЛСК
= O ЛСК
aiКСК , i = 1, 2,3 ,
j
ji
где OijЛСК – компоненты O в лабораторной системе координат.
Аналогичные преобразования для компонент произвольного тензора второго ранга Т на R 3 принимают вид:
ЛСК
TijКСК = OinЛСКTnmЛСК O ЛСК
= OinЛСК O ЛСК
,
jm
jm Tnm
TijЛСК = OniЛСКTnmЛСК OmjЛСК = OniЛСК OmjЛСКTnmЛСК ,
для тензора четвертого ранга –
КСК
ЛСК ЛСК ЛСК
Gijkl
= OinЛСК O ЛСК
jm Okp Okq Gnmpq ,
ЛСК
ЛСК ЛСК КСК
Gijkl
= OniЛСК OmjЛСК O pk
Oqk Gnmpq .
2и) Определяются значения
b ((ik)+1)(1) , n ((ik)+1)(1) , m ((ik)+1)(1) , c( k +1)(1) , B ( k +1)(1)
(по O ( k +1)(1) и известным компонентам в кристаллографической системе
координат с использованием вышеприведенных соотношений).
2к) Находятся скорости напряжений и напряжения:
σ ( k )(1) = ω ( k )(1) ⋅ σ ( k ) − σ ( k ) ⋅ ω ( k )(1) + п( k ) : (D − din ( k )(1) ) ,
σ ( k +1)(1) = σ ( k ) + ∆t σ ( k )(1) .
3. Вычисления на макроуровне
3а) Определяются значения внутренних переменных макроуровня:
– тензор спина
Ω( k )(1) =< ω ( k )(1) > ,
– тензор эффективных упругих свойств, его флуктуаций, флуктуаций деформации скорости, спина и напряжений:
П( k ) =< п( k ) > ,
п( k )′ = п( k ) − < п( k ) >, din ( k )(1)′ = din ( k )(1) − < din ( k )(1) >,
ω ( k )(1)′ = ω ( k )(1) − < ω ( k )(1) >, σ ( k )′ = σ ( k ) − < σ ( k ) >,
– неупругая составляющая тензора деформации скорости
215
Din ( k )(1) =< din ( k )(1) > + (П( k ) ) : < п( k )′ : d in ( k )(1)′ > −
−1
− (П( k ) ) : ( < ω ( k )(1)′ ⋅ σ ( k )′ > − < σ ( k )′ ⋅ ω ( k )(1)′ > ).
−1
3б) Находятся скорости напряжений и напряжения после первой
итерации.
Σ ( k )(1) = −Ω( k )(1)T ⋅ Σ ( k ) − Σ ( k ) ⋅ Ω ( k )(1) + П( k ) : (D − Din ( k )(1) ) ,
Σ ( k +1)(1) = Σ ( k ) + ∆t Σ ( k )(1)
II. Выполняется вторая итерация схемы Адамса–Моултона, находятся значения переменных на конец шага.
Вычисления на мезоуровне
1. В цикле по кристаллитам осуществляются вычисления скоростей сдвигов, скоростей критических напряжений, определяются сдвиги
и критические напряжения на конец шага для второй итерации (индекс
кристаллита опущен).
1а) Определяются скорости сдвигов, скорость деформации и сдвиги на конец шага:
γ
( k )(2)
(i )
= γ0 H ( τ
( k +1)(1)
(i )
−τ
( k +1)(1)
c( i )
τ ((ik)+1)(1)
)τ
( k +1)(1)
c( i )
1/ m
sign ( τ ((ik)+1)(1) ) ,
τ ((ik)+1)(1) = b ((ik)+1)(1)n ((ik)+1)(1) : σ ( k +1)(1) ,
d
in ( k )( 2 )
24
= ∑ γ ((ik))(2)m ((ik)+1)(1) ,
i =1
∆t ( k )(1) ( k )(2)
( γ (i ) +γ (i ) ) , i = 1,..., K .
2
1б) Находятся скорости критических напряжений и критические
напряжения на конец шага:
γ ((ik)+1) = γ ((ik)) +
τ (c(ki)(2)
= f ( γ ((ik)+1)(1) , γ ((ik))(2) ) , i = 1,..., K ,
)
∆t ( k )(1) ( k )(2)
( τ c(i ) + τ c(i ) ) , i = 1,..., K .
2
2. В цикле по кристаллитам осуществляются вычисления скоростей и значений на конец шага остальных переменных мезоуровня для
первой итерации (индекс кристаллита опущен).
τ (c(ki+)1) = τ c(( ki)) +
216
2а) Определяется скорость моментных напряжений относительно КСК:
(m r ) m ( k )(2) = µ q m ( k +1)(1) ×
K
K
× ∑ γ ((ik))(2)n ((ik)+1)(1)b ((ik)+1)(1) − ∑ γ (mj()k )(2) n (mj()k +1)(1)b (mj()k +1)(1) ⋅ q m ( k +1)(1)
j
i
(µ r ) m ( k )(2) = −Є ⋅ (m r ) m ( k )(2) , m = 1,..., M ,
M
(µ r )( k )(2) = ∑ (µ r ) m ( k )(2) .
m=1
2б) Находится «решеточная» составляющая поворота ω 2 :
1 r (k )(2) 1 (k +1)(1)
(µ )
, при µ(k +1)(1) = µc(k +1)(1) и µ(k +1)(1) : (µr )(k )(2) ≥ 0,
+ µ
H
ω2(k )(2) = A
1 (µr )(k )(2) в противном случае.
A
2в) Определяются «материальная» составляющая поворота и полный спин решетки:
ω1( k )(2) =
K
1 ˆ T ˆ
1
(∇v − ∇v ) − ∑ γ i((i )k )( 2) (b (( ik)+1)(1) n (( ik)+1)(1) − n (( ik)+1)(1) b (( ik)+1)(1) ) −
2
i =1 2
−(β ( k +1)(1) : σ ( k +1)(1) ) ⋅ d in ( k )( 2) + d in ( k )( 2) ⋅ (β ( k +1)(1) : σ ( k +1)(1) ),
ω ( k )(2) = ω1( k )(2) + ω 2 ( k )(2) .
2г) Находится скорость моментных напряжений относительно ЛСК:
M
m ( k )(2) = ω ( k )(2) ⋅ m ( k +1)(1) − m ( k +1)(1) ⋅ ω ( k )(2) + ∑ (m r ) m ( k )(2) ,
m =1
µ
= −Є ⋅ m
.
2д) Определяются моментные напряжения на конец шага:
∆t
µ ( k +1) = µ ( k ) + (µ ( k )(1) + µ ( k )(2) ) .
2
2е) Находятся скорости изменения нормалей и их ориентация на
конец шага:
ˆ v ⋅ q m ( k +1)(1) , m = 1,..., M ,
q m ( k )(2) = (q m ( k +1)(1) ⋅ D ⋅ q m ( k +1)(1) ) ⋅ q m ( k +1)(1) − ∇
( k )(2)
( k )(2)
q m ( k +1) = q m ( k ) +
∆t m ( k )(1)
(q
+ q m ( k )(2) ) , m = 1,..., M ,
2
217
при необходимости вектор нормали q m ( k +1) нормируется.
2ж) По тензору спина определяется соответствующий вектор скорости поворота:
1
φ ( k )(2) = Є : ω ( k )(2) .
2
2з) Находится ориентационный тензор (совмещающий кристаллографическую и лабораторную системы координат) после второй итерации путем последовательного определения:
– «среднего» вектора скорости поворота
φ ( k ) = (φ ( k )(1) + φ ( k )(2) ) / 2 ,
– оси поворота
φ( k )
e = (k ) ,
|φ |
– угла поворота
(k )
∆φ ( k ) = ∆t | φ ( k ) | ,
– тензора поворота за шаг
∆R ( k ) = (cos(∆φ ( k ) ) + 1)e( k )e( k ) + cos(∆φ ( k ) )I + sin(∆φ( k ) ) e( k ) × I ,
– ориентационного тензора.
O ( k +1) = ∆R ( k ) ⋅ O ( k ) .
2и) Определяются значения b ((ik)+1) , n ((ik)+1) , m ((ik)+1) , п( k +1) , B ( k +1) (по O ( k +1)
и известным компонентам в КСК).
2к) Находятся скорости напряжений и напряжения:
σ ( k )(2) = ω ( k )(2) ⋅ σ ( k +1)(1) − σ ( k +1)(1) ⋅ ω ( k )(2) + c( k +1)(1) : (D − din ( k )(2) ) ,
∆t ( k )(1)
(σ
+ σ ( k )(2) ) .
2
3. Вычисления на макроуровне
3a) Определяются значения внутренних переменных макроуровня:
тензор спина
σ ( k +1) = σ ( k ) +
Ω( k )(2) =< ω ( k )(2) >,
– тензор эффективных упругих свойств, его флуктуаций, флуктуаций деформации скорости, спина и напряжений:
П( k +1)(1) =< п( k +1)(1) >
218
п( k +1)(1)′ = п( k +1)(1) − < п( k +1)(1) >, din ( k )(2)′ = din ( k )(2) − < din ( k )(2) >,
ω ( k )(2)′ = ω ( k )(2) − < ω ( k )(2) >, σ ( k +1)(1)′ = σ ( k +1)(1) − < σ ( k +1)(1) >,
– неупругая составляющая тензора деформации скорости
Din ( k )(2) = < din ( k )(2) > + (П( k +1)(1) ) : < п( k +1)(1)′ : din ( k )(2)′ > −
−1
− (П( k +1)(1) ) : ( < ω ( k )(2)′ ⋅ σ ( k +1)(1)′ > − < σ ( k +1)(1)′ ⋅ ω ( k )(2)′ > ).
−1
3б) Находятся скорости напряжений и напряжения после второй
итерации.
Σ ( k )(2) = −Ω( k )(2)T ⋅ Σ ( k +1)(1) − Σ ( k +1)(1) ⋅ Ω( k )(2) + П( k +1)(1) : (D − Din ( k )(2) )
∆t
Σ ( k +1) = Σ ( k ) + ( Σ ( k )(1) + Σ ( k )(2) ) .
2
Таким образом, в результате вышеприведенных операций будут
определены значения всех необходимых переменных на конец шага.
Отметим, что затраты машинного времени можно снизить при использовании параллельных вычислений: разбивать всю выборку кристаллитов, соответствующую представительному объему макроуровня,
на несколько частей, расчеты на текущем шаге для которых проводить
на отдельных вычислительных узлах.
ВОПРОСЫ К ГЛАВЕ 8
1. Назовите основные классификационные признаки многоуровневых моделей.
2. Какие гипотезы применяются в многоуровневых моделях для
связи переменных различных уровней? Проведите их анализ.
3. Опишите элементы мезоуровня, используемые в многоуровневых моделях, приведите их основные характеристики.
4. Какое физическое уравнение обычно используется в качестве
определяющего соотношения на макро- и мезоуровне?
5. Приведите схему построения двухуровневой модели, перечислите ее достоинства и недостатки.
6. Опишите процедуру согласования определяющих соотношений
двухуровневой модели.
7. Приведите основные понятия, используемые при построении
модели ротации решетки. В чем состоит отличие предлагаемой модели
219
«решеточного поворота» от известных моделей ротации (Тейлора, «материального поворота»)?
8. Запишите соотношение для определения вектора моментных
напряжений, проведите его физический анализ для случая одиночного
скольжения дислокаций при различной ориентации СС и границ кристаллита.
9. Приведите и проанализируйте соотношение для скорости «решеточного поворота».
10. Приведите алгоритм реализации метода Адамса–Моултона для
ОДУ с векторными переменными.
11. Опишите алгоритм реализации двухуровневой упруговязкопластической модели.
12. Предложите модификацию вышеуказанного алгоритма для исследования неизотермических процессов деформирования.
220
ЗАДАЧИ И УПРАЖНЕНИЯ
1. Определить законы преобразования при замене системы отсчета
локальных основных и взаимных материальных базисов в отсчётной
и текущих конфигурациях.
2. Определить законы преобразования при замене системы отсчета
правых и левых мер деформации.
3. Определить законы преобразования при замене системы отсчета
мер напряжений, энергически сопряженных мерам деформации из предыдущей задачи.
4. Найти законы преобразования при замене системы отсчета бесконечно малого материально отрезка в текущей конфигурации и относительной скорости его конца, после чего установить законы преобразования тензоров градиента скорости перемещений, деформации скорости и вихря.
5. Убедиться в невыполнении принципа материальной индифферентности для закона Гука σ = λI1 ( ε ) I + 2µε . В каких условиях допустимо использование данного закона?
6. Определить типы объективности следующих тензоров, характеризующих деформации: градиентов места, градиентов перемещений, мер
деформаций Коши–Грина, Альманси, обратной Коши–Грина, Фингера,
левой и правой мер искажения, левой и правой мер Генки, тензоров деформаций, ортогонального тензора, сопровождающего деформацию.
7. Определить типы объективности различных объективных производных тензоров, характеризующих деформации (упр. 6), тензора деформации скорости и тензора вихря.
8. Определить типы объективности следующих тензоров, характеризующих напряжения: тензора напряжений Коши, первого и второго
тензоров напряжений Пиола–Кирхгоффа, взвешенного тензора Кирхгоффа, тензора напряжений Био, энергетического тензора напряжений (верхˆ R T ⋅ σ ⋅∇
ˆ R , нижней конвективной формы тензора напряжений) Q = ∇
0
°
°
°
0
°
ˆ R ⋅ σ ⋅∇ rT и левой T = ∇ rT ⋅ σ ⋅∇
ˆR
ней Tlw = ∇ r ⋅ σ ⋅∇ rT , правой Tr = ∇
l
0
0
221
конвективных форм тензора напряжений, ротационной формы тензора
напряжений Trt = RT ⋅ σ ⋅ R .
9. Показать справедливость соотношения (1.23).
10. Показать, что тензор k (1.14) является девиатором и несимметричным тензором.
11. Используя потенциал для классической гиперупругой среды
(1.18) получить ОС (1.19).
12. В точке M в декартовой системе координат компоненты тензора моментных напряжений имеют вид
10 0 −5
µ̂ ij = 0 4 2 .
−5 2 −3
Определить вектор моментных напряжений µ̂n на площадке
1
2
2
с нормалью n = k1 − k 2 − k 3 .
3
3
3
13. Поверхностью тензора напряжений σ для некоторой точки M
сплошной среды называется такое геометрическое место точек, декартовы
координаты xi которых удовлетворяют условию σijxixj = const, где σij – компоненты тензора σ в точке M. Определить форму поверхности напряжений
для точки среды, где компоненты тензора напряжений в ортогональной
декартовой системе координат имеют следующие значения:
а) σ11 = σ22 = σ33 = σ, σij = 0 при i≠j – всестороннее растяжение (сжатие);
б) σ11 = σ, остальные σij = 0 – одноосное растяжение (сжатие);
в) σ12 = σ21 = τ, остальные σij = 0 – простой сдвиг;
г) σ11 = A, σ22 = B, σ33 = C, σij = 0 при i≠j – напряженное состояние
общего вида в главных осях тензора напряжений. Исследовать вид поверхности напряжений в зависимости от знаков A, B, C. [25]
14. В кубическом кристалле происходит сдвиг скольжением на величину α по плоскости (0 1 1) в направлении 011 . За оси координат
приняты кристаллографические оси кубического кристалла:
а) выпишите компоненты тензора деформации сдвигом,
б) выпишите компоненты тензора чистой деформации, если
скольжение на величину α` происходит в том же направлении 011 ,
но по плоскости (100) [16].
222
15. На тетрагональный кристалл действуют растягивающее напряжение σ вдоль [100] и сдвиговое напряжение τ по (100) вдоль [010]:
а) выпишете компоненты тензора напряжений, отнесенные к кристаллографическим осям,
б) найдите сдвиговое напряжение по (110) в направлении 0 11 ,
изменив оси тензора напряжений,
в) таким же способом найдите растягивающее напряжение, нормальное к (110) [16].
16. Используя соотношение Шмида, определить сдвиговые касательные напряжения для всех СС ГЦК(ОЦК, ГПУ)-кристалла, если
компоненты тензора напряжений в декартовой ортогональной системе координат, совпадающей с кристаллографической системой кубических кристаллов (для ГПУ ось Ох1 направлена вдоль [2 1 1 0], ось
Ох2 – перпендикулярна ей и лежит в базовой плоскости, ось Ох3 –
вдоль [0 0 0 1]), имеют вид:
а) σ11 = σ22 = σ33 = σ, σij = 0 при i≠j – всестороннее растяжение (сжатие);
б) σ11 = σ, остальные σij = 0 – одноосное растяжение (сжатие);
в) σ12 = σ21 = τ, остальные σij = 0 – простой сдвиг;
г) σ11 = A, σ22 = B, σ33 = C, σij = 0 при i≠j – напряженное состояние
общего вида в главных осях тензора напряжений.
17. Показать, что в вершинах текучести для ГЦК-кристаллита критерий Шмида (2.9) одновременно выполняется или для 6, или для 8 СС.
18. Кубический кристалл растягивается в направлении [100]. Его
деформация создается краевыми дислокациями, параллельными [001]
и скользящими по плоскостям (110) и (11 0) . Если плотность этих дис-
локаций равна ρ, величина вектора Бюргерса каждой b и их средняя скорость v, определите скорость возрастания деформации растяжения кристалла (равную (1/l) (dl/dt), где l – длина кристалла в направлении растяжения) [16].
19. Имеются две бесконечно длинные ортогональные винтовые
дислокации с векторами Бюргерса b1 и b2. Рассчитайте величину силы,
с которой вторая дислокация действует на первую [16].
20. Если концентрация вакансий в алюминии при его температуре
плавления составляет 9,4·10–4 и если после закалки алюминия от температуры плавления вакансии конденсируются в диски на плотноупакованных плоскостях и образуют петли Франка, определите плотность
создающихся дислокаций при радиусе петель: а) 50 Å и б) 500 Å [16].
223
21. Один из способов описания взаимной ориентации сдвойникованной области и матрицы в двойниках (1-го рода) заключается в определении угла поворота решетки сдвойникованного индивида вокруг
оси, лежащей в плоскости двойникования K1 перпендикулярно направлению сдвига η1. Определите величину угла поворота в случае двойника: а) ГЦК, б) ОЦК и г) ГПУ-материалов [16].
22. Двойник в ОЦК-металле имеет следующие элементы двойникования: K1 = (112), η1 = ( 1 1 1 ) [16].
а) Определите индексы Миллера плоскостей, в которые преобразуются под действием двойникового сдвига следующие кристаллографические плоскости: (001), (010), (100).
б) Выведите тензор преобразования индексов плоскостей и определите плоскость, в которую переходить плоскость (101).
23. Показать, что критерий Шмида соответствует критерию Треска.
24. Показать, что первый инвариант линейной комбинации
∑a M
i
i
равен 0.
25. Записать тензор пластической деформации при деформирова-
нии кристалла сдвигом краевых дислокаций по СС [110] ( 1 11) .
26. Определить величину сдвига двойника γtw ГЦК-, ОЦК- и ГПУметаллов.
27. Используя соотношение (3.12), записать в общем виде неупругую составляющую тензора деформации скорости, связанную с двойникованием.
28. Используя разложение (3.19), полярное разложение (3.20), малость упругих деформаций, показать, что тензор спина решетки при квазистатическом нагружении определяется согласно соотношению (3.22).
29. Показать, что если кристалл идеально ориентирован для сдвига
по одной системе скольжения, то поворот решетки согласно модели
Тейлора (3.18) отсутствует, несмотря на формоизменение зерна.
30. Показать, что с точки зрения линейного программирования
модели Тейлора и Бишопа–Хилла двойственны.
31. Из опыта решения задач МСС (и МДТТ, в частности) представляется обоснованным переход от трехмерных задач к двумерным
для качественного анализа поведения исследуемых систем [1]). Конечно, в природе не существует двумерных или плоских кристаллов. Однако подобный кристалл является удобным модельным материалом для
224
анализа физических моделей пластичности поликристаллических материалов. Отдельные эффекты реальных кристаллов, по-видимому, описать двумерной моделью принципиально невозможно. Между тем закономерности пластического поведения двумерных кристаллов должны
в определенной степени наблюдаться и у реальных кристаллов.
Определить рабочую плоскость для 2Д-моделирования ГЦКкристалла с учетом сдвигов по трем СС: линии краевых дислокаций из
этих СС ГЦК-кристалла ортогональны плоскости моделирования, векторы Бюргерса и нормали к плоскостям скольжения лежат в плоскости
моделирования.
32. Совпадает ли плоскость моделирования с плоскостью (111)
наиплотнейшей упаковки ГЦК-кристалла?
33. Реализовать для плоского кристалла, соответствующего ГЦКкристаллу (в 2Д-модели имеются 3 системы скольжения, векторы Бюргерса и нормали лежат в плоскости моделирования), следующие физические модели:
а) Закса,
б) Линя,
в) Тейлора,
г) Бишопа–Хилла.
С использованием построенных моделей проанализировать различные процессы деформирования.
34. Определить рабочую плоскость для 2Д-моделирования ОЦКкристалла с учетом сдвигов по СС: линии краевых дислокаций из этих
СС ГЦК-кристалла ортогональны рабочей плоскости, векторы Бюргерса
и нормали к плоскостям скольжения лежат в плоскости моделирования.
Определить число возможных направлений скольжения.
35. Реализовать для плоского кристалла, соответствующего ОЦКкристаллу (в 2Д-модели векторы Бюргерса и нормали лежат в плоскости
моделирования), следующие физические модели:
а) Закса,
б) Линя,
в) Тейлора,
г) Бишопа–Хилла.
С использованием построенных моделей проанализировать различные процессы деформирования.
225
36. Реализовать модель Закса для ГЦК-поликристалла. Определить
предел текучести при одноосном растяжении, если критическое напряжение сдвига для всех СС равняется τ0 (для меди τ0 = 15 МПа).
37. Реализовать модель Закса для ОЦК-поликристалла. Определить предел текучести при одноосном растяжении, если критическое
напряжение сдвига для всех СС равняется τ0.
38. Исследовать начальную поверхность текучести ГЦК-монокристалла, используя в качестве критерия начала пластического деформирования критерий Шмида: определить число ребер, вершин различного порядка (который определяется числом одновременно активных
СС), интенсивность напряжений в вершинах высокого порядка. В частности, убедиться, что критерий Шмида не может одновременно выполняться ровно на пяти СС.
39. Аналогично упр. 38 выполнить соответствующие исследования
начальной поверхности текучести ОЦК-монокристалла.
40. Исследовать начальную поверхность текучести ГЦК-монокристалла, используя в качестве критерия начала пластического деформирования критерий Шмида: определить при различных ориентировках
монокристалла на скольких СС (и на каких) будет впервые выполнен
критерий текучести при монотонном растяжении ГЦК-монокристалла
от естественной конфигурации.
41. При одноосном растяжении ГЦК-монокристалла в случае специальной ориентировки – при нахождении оси растяжения в вершине
стереографического треугольника [0 0 1] (при рассмотрении обращенного движения) – все СС равноправны, т.е. должны быть приняты активными и скорости сдвигов по ним должны совпадать. Убедиться, что
в этом случае согласно исходной модели стесненного поворота Тейлора
K
1
( Ω = −Wp = ∑ γi (nibi − bini ) , K – число СС), спин решетки Ω нулевой,
i=1 2
в то время как при ограничении числа активных СС пятью (согласно
моделям типа Тейлора–Бишопа–Хилла) спин решетки Ω различен в зависимости от выбора активных СС.
42. Реализовать для ГЦК(ОЦК, ГПУ)-кристалла вязкоупругую модификацию модели Линя, используя соотношение (6.1). Исследовать вопрос
об эквивалентности вязкоупругой и жесткопластической моделей.
43. Реализовать для ОЦК(ГЦК, ГПУ)-кристалла вязкопластическую модификацию модели Линя, используя соотношение (6.2). Иссле226
довать вопрос об эквивалентности вязкопластической и жесткопластической моделей.
44. Реализовать для ГПУ(ГЦК, ОЦК)-кристалла упруговязкопластическую модификацию модели Линя, используя соотношение (7.82).
Исследовать эффект «нырка» интенсивности напряжений.
45. Показать справедливость соотношений (7.22) и (7.23).
46. Проверить справедливость соотношения (7.26).
47. Показать, что π, определяемый соотношением (7.28), является
тензором четвертого ранга.
48. Реализовать модель мезоуровня (8.30) неупругого деформирования ГЦК-, ОЦК-, ГПУ-кристаллита.
49. Реализовать двухуровневую модель неупругого деформирования ГЦК-, ОЦК-, ГПУ-поликристалла с учетом согласования ОС масштабных уровней.
227
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
228
Ашихмин В.Н., Трусов П.В. Прямое моделирование упругопластического поведения поликристаллов на мезоуровне // Физическая
мезомеханика. – 2002. – Т. 5. – № 3. – С. 37–51.
Батдорф С.Б., Будянский Б.А. Зависимость между напряжениями
и деформациями для упрочняющегося металла при сложном
напряженном состоянии // Механика: сб. переводов. – 1955. –
№ 5. – С. 120–127.
Батдорф С.Б., Будянский Б.А. Математическая теория пластичности, основанная на концепции скольжения // Механика: сб.
переводов. – 1962. – № 1. – С. 135–155.
Белл Дж. Ф. Экспериментальные основы механики деформируемых твердых тел. Ч. 1: Малые деформации (600 с.); Ч. 2:
Конечные деформации (432 с.). – М.: Наука: Гл. ред. физ.-мат.
лит-ры, 1984.
Бермант А.Ф., Араманович И.Г. Краткий курс математического анализа для втузов. – М.: Наука: Гл. ред. физ.-мат. лит-ры, 1973. – 720 с.
Васин Р.А., Еникеев Ф.У. Введение в механику сверхпластичности: в 2 ч. – Уфа: Гилем, 1998. – Ч. 1. – 280 с.
Вассерман Г. Текстуры металлических материалов. – М: Металлургия, 1969. – 654 с.
Введение в математическое моделирование: учеб. пособие / под
ред. П.В. Трусова. – М.: Логос, 2004. – 440 с.
Теория образования текстур в металлах и сплавах / Я.Д. Вишняков, А.А. Бабарэко, С.А. Владимиров, И.В. Эгиз. – М: Наука,
1979. – 344 с.
Жуковский И.М., Рыбин В.В., Золоторевский Н.Ю. Теория
пластических ротаций в деформируемых кристаллах // ФММ. –
1982. – Т. 54, № 1. – С. 17–27.
Зубчанинов В.Г. Механика сплошных деформируемых сред. –
Тверь: Изд-во ТГТУ: ЧуДо, 2000. – 703 с.
Ильюшин А.А. Пластичность. Основы общей математической теории. – М.: Изд-во АН СССР, 1963. – 272 с.
13.
14.
15.
16.
17.
18.
19.
20.
21.
22.
23.
24.
25.
26.
27.
28.
Ильюшин А.А. Пластичность. Ч. 1: Упругопластические деформации. – М.: Логос, 2004. – 388 с.
Ишлинский А.Ю., Ивлев Д.Д. Математическая теория пластичности. – М.: ФИЗМАТЛИТ, 2001. – 704 с.
Кайбышев О.А., Валиев Р.З. Границы зерен и свойства металлов. – М.: Металлургия, 1987. – 214 с.
Келли А., Гровс Г. Кристаллография и дефекты в кристаллах. –
М.: Мир, 1974. – 504 с.
Койтер В.Т. Моментные напряжения в теории упругости // Механика: сб. переводов. – 1965. – № 3 (91). – С. 89–112.
Кондратьев Н.С., Трусов П.В. О мере разориентации систем скольжения соседних кристаллитов в поликристаллическом агрегате //
Вестник ПНИПУ. Механика. – 2012. – № 2. – С. 112–127.
Кудрявцев И.П. Текстуры в металлах и сплавах. – М: Металлургия, 1965. – 292 с.
Курант Р., Гильберт Д. Методы математической физики. Т. 1. –
М.-Л.: Гостехтеоретиздат, 1951. – 476 с.
Линь Т.Г. Физическая теория пластичности // Проблемы теории
пластичности. Сер. Новое в зарубежной механике. Вып. 7. – М.:
Мир, 1976. – С. 7–68.
Макаров П.В. Моделирование процессов деформации и разрушения на мезоуровне // Изв. РАН. МТТ. – 1999. – № 5. – С. 109–130.
Макаров П.В. Моделирование упругопластической деформации
и разрушения неоднородных сред на мезоуровне // Физическая
мезомеханика. – 2003. – Т. 6. – № 4. – С. 111–124.
Макаров П.В. Нагружаемый материал как нелинейная динамическая система. Проблемы моделирования // Физическая мезомеханика. – 2005. – Т. 8. – № 6. – С. 39–56.
Механика сплошных сред в задачах. Т. 1: Теория и задачи / под
ред. М.Э. Эглит. – М.: Московский лицей, 1996. – 396 с.
Миндлин Р.Д. Влияние моментных напряжений на концентрацию
напряжений // Механика: сб. переводов. – 1964. – № 4 (86). –
С. 115–128.
Миркин Л.И. Физические основы прочности и пластичности. –
М.: Изд-во Моск. ун-та, 1968. – 538 с.
Анализ пространственного распределения ориентировок элементов
структуры поликристаллов, получаемого методами просвечивающей электронной микроскопии и обратно рассеянного пучка
электронов в сканирующем электронном микроскопе / С.Ю. Миро229
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
230
нов, В.Н. Даниленко, М.М. Мышляев, А.В. Корнева // Физика
твердого тела. – 2005. – Т. 47. – № 7. – С. 1217–1225.
Моисеев Н.Н., Иванилов Ю.П., Столярова Е.М. Методы оптимизации. – М.: Наука; Гл. ред. физ.-мат. лит-ры, 1978. – 352 с.
Орлов А.Н. Введение в теорию дефектов в кристаллах. – М.:
Высшая школа, 1983. – 144 с.
Поздеев А.А., Трусов П.В., Няшин Ю.И. Большие упругопластические деформации: теория, алгоритмы, приложения. – М.:
Наука, 1986. – 232 с.
Полухин П.И., Горелик С.С., Воронцов В.К. Физические основы
пластической деформации. – М.: Металлургия, 1982. – 584 с.
Работнов Ю.Н. Механика деформируемого твердого тела. – М.:
Наука; Гл. ред. физ.-мат. лит-ры, 1988. – 712 с.
Рыбин В.В. Большие пластические деформации и разрушение
металлов. – М.: Металлургия, 1986. – 224 с.
Трусделл К. Первоначальный курс рациональной механики
сплошных сред. – М.: Мир, 1975. – 592 с.
Трусов П.В., Ашихмин В.Н., Волегов П.С. Двумерная модель
пластического деформирования монокристалла // Математические
модели и методы механики сплошных сред: сб. науч. статей. –
Владивосток: ИАПУ ДВО РАН. – 2007. – С. 259–269.
Трусов П.В., Ашихмин В.Н., Волегов П.С. Моделирование формирования текстуры в пластически деформируемом поликристалле // Упругость и неупругость: сб. науч. статей. – М.: Изд-во
Моск. ун-та, 2006. – С. 242–248.
Трусов П.В., Ашихмин В.Н., Волегов П.С., Швейкин А.И.
Конститутивные соотношения и их применение для описания
эволюции микроструктуры // Физическая мезомеханика. – 2009. –
Т. 12. – № 3. – С. 61–71.
Двухуровневая модель для описания эволюции структуры поликристаллических материалов при неупругом деформировании /
П.В. Трусов, В.Н. Ашихмин, П.С. Волегов, А.И. Швейкин // Упругость и неупругость: материалы международ. симп. по пробл.
механики деформируемых тел, посв. 100-летию со дня рожд.
А.А. Ильюшина. – М.: Изд-во МГУ, 2011. – С. 240–244.
Трусов П.В., Ашихмин В.Н., Швейкин А.И. Двухуровневая модель стационарных процессов упругопластического деформирования. Ч. 1: Алгоритм // Вычислительная механика сплошных
сред. – 2008. – Т. 1, № 3. – С. 15–24.
41.
42.
43.
44.
45.
46.
47.
48.
49.
Трусов П.В., Ашихмин В.Н., Швейкин А.И. Двухуровневая модель упругопластического деформирования поликристаллических
материалов // Механика композиционных материалов и конструкций. – 2009. – Т. 15, № 3. – С. 327–344.
Трусов П.В., Ашихмин В.Н., Швейкин А.И. Анализ деформирования ГЦК-металлов с использованием физической теории
упругопластичности // Физическая мезомеханика. – 2010. – Т. 13. –
№ 3. – С. 21–30.
Трусов П.В., Волегов П.С. Определяющие соотношения с внутренними переменными и их применение для описания упрочнения в монокристаллах // Физическая мезомеханика. – 2009. –
Т. 12, № 5. – С. 65–72.
Трусов П.В., Волегов П.С. Физические теории пластичности:
приложение к описанию упрочнения в поликристаллах // Вестник
Тамбовского университета. Сер. Естественные и технические
науки. – Тамбов, 2010. – Т. 15, вып. 3, ч. 1. – С. 983–984.
Трусов П.В., Волегов П.С. Физические теории пластичности:
теория и приложения к описанию неупругого деформирования
материалов. Ч. 1: Жесткопластические и упругопластические
модели // Вестник ПГТУ. Механика. – Пермь: Изд-во Перм. гос.
техн. ун-та, 2011. – № 1. – С. 5–45.
Трусов П.В., Волегов П.С. Физические теории пластичности:
теория и приложения к описанию неупругого деформирования
материалов. Ч. 2: Вязкопластические и упруговязкопластические
модели // Вестник ПГТУ. Механика. – Пермь: Изд-во Перм. гос.
техн. ун-та, 2011. – № 2. – С. 101–131.
Трусов П.В., Волегов П.С. Физические теории пластичности:
теория и приложения к описанию неупругого деформирования
материалов. Ч. 3. Теории упрочнения, градиентные модели //
Вестник ПГТУ. Механика. – Пермь: Изд-во Перм. гос. техн. ун-та,
2011. – № 3. – С. 146–197.
Трусов П.В., Волегов П.С., Швейкин А.И. Конститутивная упруговязкопластическая модель ГЦК-поликристаллов: теория, алгоритмы, приложения. – LAP LAMBERT Academic Publishing,
2011. – 147 c.
Трусов П.В., Волегов П.С., Янц А.Ю. Описание внутризеренного
и зернограничного упрочнения моно- и поликристаллов // Научно-технические ведомости СПбГПУ. Физико-математические
науки. – СПб., 2010. – № 2 (98). – С. 110–119.
231
50.
51.
52.
53.
54.
55.
56.
57.
58.
59.
60.
61.
62.
63.
232
Трусов П.В., Келлер И.Э. Теория определяющих соотношений. Ч. 1:
Общая теория. – Пермь: Изд-во Перм. гос. техн. ун-та, 2006. – 173 с.
Трусов П.В., Швейкин А.И. Теория пластичности. – Пермь: Изд-во
Перм. нац. исслед. политехн. ун-та, 2011. – 419 с.
Трусов П.В., Швейкин А.И. Многоуровневые физические модели
моно- и поликристаллов. Статистические модели // Физическая
мезомеханика. – 2011. – Т. 14, № 4. – С. 17–28.
Трусов П.В., Швейкин А.И. Многоуровневые физические модели
моно- и поликристаллов. Прямые модели // Физическая мезомеханика. – 2011. – Т. 14, № 5. – С. 5–30.
Физическая мезомеханика и компьютерное конструирование
материалов: в 2 т. / В.Е. Панин, В.Е. Егорушкин, П.В. Макаров
[и др.]. – Новосибирск: Наука; Сибир. изд. фирма РАН, 1995. –
Т. 1. – 298 с.; Т. 2. – 320 с.
Хирт Дж., Лоте И. Теория дислокаций. – М.: Атомиздат, 1972. – 600 с.
Хоникомб Р. Пластическая деформация металлов. – М.: Мир,
1972. – 408 с.
Швейкин А.И., Ашихмин В.Н., Трусов П.В. О моделях ротации
решетки при деформировании металлов // Вестник ПГТУ. Механика. – Пермь: Изд-во ПГТУ, 2010. – № 1. – С. 111–127.
Шермергор Т.Д. Теория упругости микронеоднородных сред. –
М.: Наука, 1977. – 400 с.
Янц А.Ю., Волегов П.С. Несимметричная физическая теория
пластичности ГЦК-поликристаллов: проблемы определения
скоростей сдвигов в системах скольжения при использовании
вязких соотношений // Вестник ПНИПУ. Прикладная математика
и механика. – Пермь: Изд-во Перм. нац. исслед. политехн. ун-та,
2011. – № 9. – С. 200–211.
Ahzi S., M’Guil S. A new intermediate model for polycrystalline
viscoplastic deformation and texture evolution // Acta Materialia. –
2008. – Vol. 56. – Р. 5359–5369.
Alankar A., Mastorakos I. N., Field D.P. A dislocation-density-based
3D crystal plasticity model for pure aluminum // Acta Materialia. –
2009. – Vol. 57. – Р. 5936–5946.
Anand L., Kothari M. A computational procedure for rate-independent
crystal plasticity // J. of the Mechanics and Physics of Solids. – 1996. –
Vol. 44. – № 4. – P. 525–558.
Asaro R.J. Micromechanics of crystals and polycrystals // Advances in
Applied Mechanics. – 1983. – Vol. 23. – Р. 1–115.
64.
65.
66.
67.
68.
69.
70.
71.
72.
73.
74.
75.
76.
Asaro R.J., Needleman A. Texture development and strain hardening
in rate dependent polycrystals // Acta Metall. – 1985. – Vol. 33. № 6. –
P. 923–953.
Asaro R.J., Rice J.R. Strain localization in ductile single crystals //
J. Mech. Phys. Solids. – 1977. – Vol. 8. – P. 309–338.
Ashby M.F. The deformation of plastically non-homogeneous
materials // Phil. Mag. 1970. – Vol. 21. – P. 399–424.
Baczmaňski A., Hfaiedh N., François M., Wierzbanowski K. Plastic
incompatibility stresses and stored elastic energy in plastically
deformed copper // Mater. Sci. Eng. – 2009. – A 501. – Р. 153–165.
Balasubramanian S., Anand L. Elasto-viscoplastic constitutive equations
for polycrystalline fcc materials at low homologous temperatures //
J. Mech. and Phys. Solids. – 2002. – Vol. 50. – P. 101–126.
Barlat F., Duarte J.M. Ferreira, Gracio J.J., A.B. Lopes, E.F.Rauch
Plastic flow for non-monotonic loading conditions of an aluminum alloy
sheet sample // Int. J. Plasticity. – 2003. – Vol. 19. – Р. 1215–1244.
Batra R.C., Zhu Z.G. Effect of loading direction and initial imperfections
on the development of dynamic shear bands in a FCC single crystal //
Acta Mechanica. – 1995. – Vol. 113. – № 1–4. – P. 185–203.
Beyerlein I.J., Lebensohn R.A., Tome C.N. Modeling texture and
microstructural evolution in the equal channel angular extrusion
process // Mater. Sci. and Eng. – 2003. – Vol.A345. – Р. 122–138.
Bilby B.A., Gardner L.R.T., Stroh A.N. Continuous distributions of
dislocations and the theory of plasticity // Proc. 9th Int. Congr. Appl.
Mech. Bruxelles, 1956. – Universiteґ de Bruxelles. – 1957. – Vol. 8. –
Р. 35–44.
Bishop J.F.W., Hill R. A theory of the plastic distortion of a polycristalline aggregate under combined stresses // Phil. Mag. Ser. 7. – 1951. –
Vol. 42. – № 327. – P. 414–427.
Bishop J.F.W., Hill R. A theoretical derivation of the plastic proporties
of a polycristalline face – centered metal // Phil. Mag. Ser. 7. – 1951. –
Vol. 42. – № 334. – P. 1298–1307.
Bőhlke T., Risy G., Bertram A. A texture component model for anisotropic polycrystal plasticity // Comput. Mater. Sci. – 2005. – Vol. 32. –
Р. 284–293.
Brown S., Kim K. and Anand L. An internal variable constitutive
model for hot working of metals // Int. J. Plasticity. – 1989. – Vol. 5. –
P. 95–130.
233
77.
78.
79.
80.
81.
82.
83.
84.
85.
86.
87.
88.
89.
90.
234
Bunge H.J. Texture analysis in material science. – London:
Butterworths, 1982.
Busso E. P. Multiscale approaches: from the nanomechanics to the
micromechanics // Computational and Experimental Mechanics of
Advanced Materials. – 2006. – P. 141–165.
Busso E.P., Cailletaud G. On the selection of active slip systems in crystal
plasticity // Int. J. of Plasticity. – 2005. – Vol. 21. – P. 2212–2231.
Cailletaud G., Diard O., Feyel F., Forest S. Computational crystal
plasticity: from single crystal to homogenized polycrystal // Technische
Mechanik. – 2003. – Band 23. Heft 2–4. – P. 130–145.
Cermelli P., Gurtin M.E. On the characterization of geometrically
necessary dislocations in finite plasticity // J. Mech. Phys. Solids. –
2001. – Vol. 49. – Р. 1539–1568.
Clayton J.D., McDowell D.L. A multiscale multiplicative
decomposition for elastoplasticity of polycrystals // Int. J. Plasticity. –
2003. – Vol. 19. – Р. 1401–1444.
Cosserat E., Cosserat F. Theorie des corps deformables. – Paris:
A. Hermann et fils, 1909. – 226 p.
Cuitino A.M., Ortiz M. Computational modeling of single crystals //
Modelling and Simulation in Material Science and Engineering. –
1992. – Vol. 1. – P. 225–263.
Demir E. A Taylor-based plasticity model for orthogonal machining of
single-crystal FCC materials including frictional effects // Int. J. Adv.
Manuf. Technol. – 2009. – Vol. 40. – Р. 847–856.
Deshpande V.S., Needleman A., Van der Giessen E. Finite strain
discrete dislocation plasticity // J. Mech. and Physics Solids. – 2003. –
Vol. 51. – Р. 2057–2083.
Evaluation of finite element based analysis of 3D multicrystalline
aggregates plasticity. Application to crystal plasticity model identification
and the study of stress and strain fields near grain boundaries / O. Diard,
S. Leclercq, G. Rousselier, G. Cailletaud // Int. J. of Plasticity. – 2005. –
Vol. 21. – P. 691–722.
Eshelby J.D. The determination of the elastic field of an ellipsoidal
inclusion, and related problems // Proc Royal Soc. London. Ser. A. –
1957. – № 241 (1226). – Р. 376–396.
Eshelby J.D. The elastic fields outside an ellipsoidal inclusion // Proc
Royal Soc. London. – 1959. – № 252 (1271). – Р. 561–569.
Crystal plasticity model with enhanced hardening by geometrically
necessary dislocation accumulation / L.P. Evers, D.M. Parks,
91.
92.
93.
94.
95.
96.
97.
98.
99.
100.
101.
102.
103.
104.
W.A.M. Brekelmans, M.G.D. Geers // J. Mech. and Phys. Solids. –
2002. – Vol. 50. – P. 2403–2424.
Micromechanical modelling of the elastoplastic behavior of metallic
material under strain-path changes / J. Fajoui, D. Gloaguen, B. Courant, R. Guillén // Comput. Mech. – 2009. – Vol. 44. – Р. 285–296.
Fleck N.A., Hutchinson J.W. Strain gradient plasticity // Adv. Appl.
Mech. – 1997. – Vol. 33. – Р. 295–362.
Follansbee P.S., Kocks U.F. A constitutive description of copper based
on the use of the mechanical threshold stress as an Internal State
Variable // Acta Metall. – 1988. – Vol. 36. – Pp. 81–93.
Forest S, Sievert R. Elastoviscoplastic constitutive frameworks for generalized continua // Acta Mechanica. – 2003. – Vol. 160. – P. 71–111.
Franciosi P. The concepts of latent hardening and strain hardening in
metallic single crystals // Acta Metall. – 1985. – Vol. 33. – P. 1601–1612.
Franciosi P., Berveiller M., Zaoui A. Latent hardening in copper and
aluminium single crystals // Acta Metall. – 1980. – Vol. 28. – Is. 3 –
Р. 273–283.
Franz G., Abed-Meraim F., Ben Zineb T. Strain localization analysis
using a multiscale model // Computational Materials Science. –
2009. – Vol. 45. – P. 768–773.
Gambin W. A model of rigid – ideally plastic crystal // J. Tech. Phys. –
1987. – Vol. 28. – № 3. – P. 309–326.
Hardening description for FCC materials under complex loading paths /
C. Gérard, B. Bacroix, M. Bornert, G. Cailletaud, J. Crépin, S. Leclercq //
Comput. Mater. Sci. – 2009. – Vol. 45. – Р. 751–755.
Gerken J. M., Dawson P.R. A crystal plasticity model that incorporates
stresses and strains due to slip gradients // J. of the Mechanics and
Physics of Solids. – 2008. – Vol. 56. – Р. 1651–1672.
Habraken A.M. Modelling the plastic anisotropy of metals // Arch.
Comput. Meth. Engng. – 2004. – 11. – № 1. – Р. 3–96.
Hill R. On constitutive macro-variables for heterogeneous solids at
finite strain // Proc. Royal Soc. Lond. – 1972. – 326 (A). – P. 131–147.
Hill R., Havner K.S. Perspectives in the mechanics of elastoplastic
crystals // Journal of the Mechanics and Physics of Solids. – 1982. –
Vol. 30. – P. 5–22.
Huang X. Grain orientation effect on microstructure in tensile strained
cooper // Scripta Materialia. – 1998. – Vol. 38. – № 11. – P. 1697–1703.
235
105. Hutchinson J.W. Bounds and self-consistent estimates for creep of
polycrystalline materials // Proc.R. Soc. Lond. – 1976. – 348 (A). –
Р. 101–127.
106. Hutchinson, J.W. Elastic-plastic behavior of polycrystalline metals and
composites // Proc. Roy. Soc. London. – 1970. – 319 (A). – P. 247–272.
107. Kalidindi S.R. Incorporation of deformation twinning in crystal
plasticity models //J. Mech. Phys. Solids. – 1998. – Vol. 46, № 2. –
P. 267–290.
108. Kalidindi S.R. Modeling anisotropic strain hardening and deformation
textures in low stacking fault energy fcc metals // Int. J. Plasticity. –
2001. – Vol. 17. – P. 837–860.
109. Kalidindi S.R., Anand L. Macroscopic shape change and evolution of
crystallographic texture in pre-textured FCC metals // J. Mech. Phys.
Solids. – 1994. – Vol. 42. – № 3. – P. 459–490.
110. Kalidindi S.R., Bronkhorst C.A., Anand L. Crystallographic texture
evolution in bulk deformation processing of FCC metals // J. Mech.
Phys. Solids. – 1992. – Vol. 40. – № 3. – P. 537–569.
111. Kim H.-K., Oh S.-I. Finite element analysis of grain-by-grain
deformation by crystal plasticity with couple stress // Int. J. Plasticity. –
2003. – Vol. 19. – Р. 1245–1270.
112. Kocks U. F., Argon A. S. and Ashby M. F. Thermodynamics and
kinetics of slip // Prog. Mater. Sci. – 1975. – Vol. 19. – P. 141–145.
113. Kok S., Beaudoin A.J., Tortorelli D.A. A polycrystal plasticity model
based on the mechanical threshold // Int. J. of Plasticity. – 2002. –
Vol. 18. – P. 715–741.
114. Kothari M., Anand L. Elasto-viscoplastic constitutive equations for
polycrystalline metals: Application to tantalum // Journal of the
Mechanics and Physics of Solids. – 1998. – Vol. 46. – P. 51–67, 69–83.
115. Kouchmeshky B., Zabaras N. Modeling the response of HCP
polycrystals deforming by slip and twinning using a finite element
representation of the orientation space // Comput. мater. sci. – 2009. –
Vol. 45. – Р. 1043–1051.
116. Kratochvil J., Tokuda M. Plastic response of polycrystalline metals
subjected to complex deformation history // Trans. ASME. J. Engng.
Mater. Technol. – 1984. – Vol. 106. – P. 299–303.
117. Kroner E. Allgemeine kontinuumstheorie der versetzungen und
eigenspannungen // Arch. Rational Mech. Anal. – 1960. – B. 4. –
S. 273–334.
236
118. Jr. Deformation bands, the LEDS theory, and their importance in texture
development: Part I: Previous evidence and new observations /
D. Kuhlman-Wilsdorf, S.S. Kulkarni, J.T. Moore, E.A. Starke // Metallurgical and Mater. Trans. A. – 1999. – Vol. 30A. – P. 2491–2501.
119. Kuhlmann-Wilsdorf D. Deformation bands, the LEDS theory, and their
importance in texture development: Part II: Theoretical conclusions //
Metallurgical and Mater. Trans. A. – 1999. – Vol. 30A. – P. 2391–2401.
120. Le K. C., Stumpf H. A model of elastoplastic bodies with continuously
distributed dislocations // Int. J. Plasticity. – 1996. – Vol. 12. – Is. 5 –
Р. 611–627.
121. Lee E.H. Elastic plastic deformation at finite strain // ASME J. Appl.
Mech. – 1969. – Vol. 36. – P. 1–6.
122. Lee E.H., Liu D.T. Elastic-plastic theory with application to planewave analysis // J. Appl. Phys. – 1967. – Vol. 38. – Р. 19–27.
123. Leffers T., Ray R.K. The brass-type texture and its deviation from the
copper-type texture // Prog. Mater. Sci. – 2008. – Vol. 17. – P. 98–143.
124. Lin T.H. Analysis of elastic and plastic strains of a face – centered cubic
crystal // J. Mech. Phys. Solids. – 1957. – Vol. 5, № 1. – P. 143–149.
125. Lubarda V. A. Constitutive theories based on the multiplicative
decomposition of deformation gradient: Thermoelasticity, elastoplasticity,
and biomechanics // Appl Mech Rev. – 2004. –Vol. 57, № 2. – Р. 95–108.
126. Luscher D.J., McDowell D.L., Bronkhorst C.A. A second gradient
theoretical framework for hierarchical multiscale modeling of
materials // Int. J.Plasticity. – 2010. – Vol. 26. – Р. 1248–1275.
127. Ma A., Roters F.A. А constitutive model for fcc single crystals based
on dislocation densities and its application to uniaxial compression of
aluminium single crystals //Acta Materialia. – 2004. – Vol. 52. –
Р. 3603–3612.
128. Ma A., Roters F., Raabe D. A dislocation density based constitutive
model for crystal plasticity FEM including geometrically necessary
dislocations // Acta Materialia. – 2006. – Vol. 54. – Р. 2169–2179.
129. Ma A., Roters F., Raabe D. On the consideration of interactions
between dislocations and grain boundaries in crystal plasticity finite
element modeling –Theory, experiments, and simulations // Acta
Materialia. – 2006. – Vol. 54. – Р. 2181–2194.
130. Ma A., Roters F., Raabe D. A dislocation density based constitutive
law for BCC materials in crystal plasticity FEM // Computational
Materials Science. – 2007. – Vol. 39. – Р. 91–95.
237
131. Mahesh S. A hierarchical model for rate-dependent polycrystals // Int.
J. Plasticity. – 2009. – Vol. 25. – Р. 752–767.
132. Mareau C., Favier V., Berveiller M. Micromechanical modeling coupling
time-independent and time-dependent behaviors for heterogeneous
materials // Int. J. Solids and Structures. – 2009. – Vol. 46. – Р. 223–237.
133. Masima M. und Sachs G.O. Mechanische Eigenschaften von
Messingkristallen // Z. Physik. – 1928. – B. 50. – S. 161–186.
134. Mayeur J.R., McDowell D.L. A three-dimensional crystal plasticity
model for duplex Ti–6Al–4V // Int. J. Plasticity. – 2007. – Vol. 23. –
Р. 1457–1485.
135. McDowell D. L. Viscoplasticity of heterogeneous metallic materials //
Mater. Sci. Eng. R. – 2008. – Vol. 62. – Р. 67–123.
136. McGinty R.D., McDowell D.L. A semi-implicit integration scheme for
rate independent finite crystal plasticity // Int. J. Plasticity. – 2006. –
Vol. 22. – P. 996–1025.
137. Menzel A., Steinmann P. On the continuum formulation of higher
gradient plasticity for single and polycrystals // J. Mech. and Physics
Solids. – 2000. – Vol. 48. – Is. 8 – Р. 1777–1796.
138. Méric L., Cailletaud G., Gaspérini M. F.E. calculations of copper
bicrystal specimens submitted to tension-compression tests // Acta
Metall. – 1994. – Vol. 42. – Is. 3 – Р. 921–935.
139. M’Guil S., Ahzi S., Khaleel M.A. An intermediate viscoplastic model
for deformation texture evolution in polycrystals // Proceed. ICOTOM
14. Leuven. Belgium. – 2005. – P. 989–994.
140. Miehe C. Multisurface thermoplasticity for single crystals at large
strains in terms of Eulerian vector updates // Int. J. Solids and Struct. –
1996. – Vol. 33. – № 20–22. – P. 3103–3130.
141. Miehe C., Rosato D. Fast texture updates in fcc polycrystal plasticity
based on a linear active-set-estimate of the lattice spin // J. Mech.
Phys. – 2007. – Vol. 55. – P. 2687–2716.
142. Myagchilov S., Dawson P.R. Evolution of texture in aggregates of
crystals exhibiting both slip and twinning // Modeling and Simulation in
Materials Science and Engineering. – 1999. – Vol. 7, № 6. – P. 975–1004.
143. Naghdi P.M., Srinivasa A.R. A dynamical theory of structured solids.
I Basic developments // Phil. Trans. R. Soc. Lond. – 15 December
1993. – Vol. 345, № 1677. – Р. 425–458.
144. Neale K.W. Use of crystal plasticity in metal forming simulations //
Int. J. Mech. Sci. – 1993. – Vol. 35 (12). – Р. 1053–1063.
238
145. Finite element analysis of crystalline solids / A. Needleman, R.J. Asaro,
J. Lemonds, D. Peirce // Comp. Meth. Appl. Mech. Engng. – 1985. –
Vol. 52. – P. 689–708.
146. Nye J.F. Some geometrical relations in dislocated crystals // Acta
Metall. – 1953. – Vol. 1. – Р. 153–162.
147. Orowan E. Problems of plastic gliding // Proc. Phys. Soc. – 1940. –
Vol. 62. – P. 8–22.
148. Ortiz M., Repetto E.A. Nonconvex energy minimization and dislocation structures in ductile single crystals // Journal of the Mechanics
and Physics of Solids. – 1999. – Vol. 49. – Р. 397–462.
149. Pan, J., Rice, J.R. Rate sensitivity of plastic flow and implications for
yield-surface vertices // Int. J. Solids Struc. – 1983. – Vol. 19. –
P. 973–987.
150. Peirce D., Asaro R.J., Needleman A. An analysis of nonuniform and
localized deformation in ductile single crystals // Acta Metallurgica. –
1982. – Vol. 30. – P. 1087–1119.
151. Polizzotto C. A nonlocal strain gradient plasticity theory for finite
deformations // Int. J. Plasticity. – 2009. – URL: doi:
10.1016/j.ijplas.2008.09.009
152. Potirniche G.P., Horstemeyer M.F., Ling X.W. An internal state
variable damage model in crystal plasticity // Mechanics of
Materials. – 2007. – Vol. 39. – Р. 941–952.
153. Raabe D., Roters F. Using texture components in crystal plasticity
finite element simulations // Int. J. Plasticity. – 2004. – Vol. 20. –
Р. 339–361.
154. Radi M., Abdul-Latif A. Grain shape effect on the biaxial elasticinelastic behavior of polycrystals with a self-consistent approach //
Proc. Eng. – 2009. – Vol. 1. – Р. 13–16.
155. Ramtani S., Bui H.Q., Dirras G. A revisited generalized self-consistent
polycrystal model following an incremental small strain formulation
and including grain-size distribution effect // Int. J. Engng Sci. –
2009. – Vol. 47. – Р. 537–553.
156. Rollett A.D., Lee S,. Lebensohn R.A. 3D image-based viscoplastic
response with crystal plasticity // Microstructure and Texture in Steels
(eds. A. Haldar, S. Suwas and D. Bhattacharjee). – Springer, 2009. –
Р. 255–264.
157. Rousselier G., Leclercq S. A simplified «polycrystalline» model for
viscoplastic and damage finite element analyses // Int. J. Plasticity. –
2006. – Vol. 22. – Р. 685–712.
239
158. Sachs G. Zur Ableitung einer Fliessbedingung // Z. Verein Deut. Ing. –
1928. – В. 72. – S. 734–736.
159. Sauzay M. Analytical modelling of intragranular backstresses due to
deformation induced dislocation microstructures // Int. J. Plasticity. –
2008. – Vol. 24. – Р. 727–745.
160. Shizawa K., Zbib H.M. A thermodynamical theory of gradient
elastoplasticity with dislocation density tensor. I: Fundamentals // Int.
J. Plasticity. – 1999. – Vol. 15. – Is. 9 – Р. 899–938.
161. Shu J. Y., Fleck N. A. Strain gradient crystal plasticity: size-dependent
deformation of bicrystals // J. Mech. and Phys. Solids. – 1999. – 47. –
Р. 297–324.
162. Steck E. A., Harder J. Finite element simulation of local plastic flow in
polycrystals // IVTAM Symposium on Micro- and Macrostructural
Aspects of Thermoplasticity / O.T. Bruhns and E. Stein (eds.). –
1999. – Р. 79–88.
163. Svendsen B. Continuum thermodynamic models for crystal plasticity
including the effects of geometrically-necessary dislocations //
J. Mech. Phys. Solids. – 2002. – Vol. 50. – Р. 1297–1329.
164. Taylor G.I. Plastic strain in metals // J. Inst. Metals. – 1938. –
Vol. 62. – P. 307–324.
165. Taylor G.I., Elam C.F. The distortion of an aluminium crystal during
a tensile test // Proc. Roy. Soc. (London). – 1923. – Ser. A 102. –
P. 643–647.
166. Taylor G.I., Elam C.F. The plastic extension and fracture of aluminium
crystals // Proc. Roy. Soc. (London). – 1925. – Ser. A 108. – P. 28–51.
167. Tinga T., Brekelmans W.A.M., Geers M.G.D. A strain-gradient crystal
plasticity framework for single crystal nickel-based superalloys //
Report National Aerospace Laboratory NLR-TP-2005-628. –
Amsterdam, 2005. – 35 р.
168. Tokuda M., Kratochvil J. Prediction of subsequent yield surface by
a simple mechanical model of polycrystal // Arch. Mech. – 1984. –
Vol. 36. – № 5–6. – P. 661–672.
169. Tokuda M., Kratochvil J., Ohashi Y. On mechanism of induced plastic
anisotropy of polycrystalline metals // Bull. JSME. – 1982. – Vol. 25. –
№ 208. – P. 1491–1497.
170. Tokuda M., Kratochvil J., Ohno N. Inelastic behaviour of polycrystalline
metals under complex loading condition // Int. J. of Plasticity. – 1985. –
Vol. 1. – P. 141–150.
240
171. Tokuda M., Ohno N., Kratochvil J. Unified constitutive equations for
inelastic behaviours of polycrystalline metals based on a semi-micro
approach // Proc. Int. Conf. On Creep. – Tokyo. – 1986. – P. 411–416.
172. Constitutive relations and their application to the description of
microstructure evolution / P.V. Trusov, V.N. Ashikhmin, P.S. Volegov, A.I. Shveykin // Physical Mesomechanics. – January-April
2010. – Vol. 13, Is. 1–2. – P. 38–46.
173. Trusov P.V., Volegov P.S. Internal variable constitutive relations and
their application to description of hardening in single crystals //
Physical Mesomechanics. – 2010. – Vol. 13, Is. 3–4. – P. 152–158.
174. Slip system based model for work hardening of aluminium, including
transient effects during strain path changes / S. Van Boxel, M. Seefeldt, B. Verlinden, P. Van Houtte // Вопросы материаловедения. –
2007. – № 4 (52). – Р. 111–117.
175. Van Houtte P. Calculation of the yield locus of textured polycrystals
using the Taylor and the relaxed Taylor theory // Textures and
Microstructures. – 1987. – Vol. 7. – P. 29–72.
176. Van Houtte P., Aernoudt E. Solution of the generalized Taylor theory
of plastic flow. P.I. Introduction and linear programming. P.II: The
Taylor theory // Z. Metallkde. – 1975. – Bd. 66. – H. 4. – S. 202–209.
177. Van Houtte P., Delannay L., Samajdar I. Quantitative prediction of cold
rolling textures in low-carbon steel by means of the LAMEL model //
Textures and Microstructures. – 1999. – Vol. 31. – P. 109–149.
178. Deformation texture prediction: from the Taylor model to the advanced
Lamel model / P. Van Houtte, S. Li, M. Seefeldt, L. Delannay // Int. J.
Plasticity. – 2005. – Vol. 21. – P. 589–624.
179. Application of yield loci calculated from texture data / P. Van Houtte,
K. Mols, A. Van Bael, E. Aernoudt // Textures and Microstructures. –
1989. – Vol. 11. – P. 23–39.
180. Van Houtte P., Peeters B. Effect of deformation-induced intragranular
microstructure on plastic anisotropy and deformation textures // Mater.
Sci. Forum. – 2002. – P. 408–412, 985–990.
181. Voigt W. Theoretische Studien uber die Elasticitatsverhaltnisse der
Kristalle. – Abh. Ges. Wiss. Gottingen. – 1887. – B. 34.
182. Comparison of simulated and experimental deformation textures for
BCC metals / F. Wagner, G. Canova, P. Van Houtte, A. Molinari //
Textures and Microstructures. – 1991. – Vol. 14–18. – P. 1135–1140.
183. Zuo Q.H. On the uniqueness of a rate-independent plasticity model for
single crystals // Int. J. Plasticity. – 2011. – Vol. 27. – Р. 1145–1164.
241
ПРЕДМЕТНЫЙ УКАЗАТЕЛЬ
Барьеры Ломера–Коттрелла ..................................................................... 48
Вектор Бюргерса ....................................................................................... 40
Винтовая дислокация ................................................................................ 41
Внутренние переменные ........................................................................... 14
Вязкоупругие и вязкопластические физические модели .................... 134
Двойникование .......................................................................................... 52
Дефект упаковки ....................................................................................... 44
Дислокации ................................................................................................ 40
Дислокации геометрически необходимые .............................................. 84
Дислокации статистически накопленные ............................................... 84
Дислокации частичные ............................................................................. 44
Дислокации Шокли ................................................................................... 44
Закон гиперупругости ............................................................................... 33
Закон гипоупругости ............................................................................... 127
Закон изотропного упрочнения Тейлора ................................................ 60
Закон Шмида ...................................................................................... 58, 83
Законы упрочнения для систем скольжения .......................................... 61
Конститутивные модели с внутренними переменными ........................ 14
Краевая дислокация .................................................................................. 40
Многоуровневые модели .......................................................................... 19
Модель Бишопа–Хилла .......................................................................... 104
Модель Закса ............................................................................................. 96
Модель Койтера ......................................................................................... 29
Модель Линя ............................................................................................ 117
Модель Тейлора ........................................................................................ 98
Мультипликативное разложение градиента места ................................ 93
Напряжения от дислокаций ...................................................................... 49
Обобщенный континуум .......................................................................... 26
Определяющие соотношения геометрически нелинейные ................... 23
Перегибы .................................................................................................... 51
Плотность дислокаций ....................................................................... 42, 83
Принцип максимума работы для монокристалла ................................ 102
Принцип максимума работы для поликристалла ................................. 111
Принцип минимума сдвига (расширенный) ........................................ 107
Принцип минимума сдвига для поликристалла ........................... 113, 243
242
Принцип минимума сдвига Тейлора ....................................................... 99
Сидячие дислокации Франка ................................................................... 47
Стандартный тетраэдр Томпсона ............................................................ 47
Структура конститутивной модели с внутренними переменными ...... 17
Ступенька ................................................................................................... 51
Текстура ....................................................................................................... 9
Тензор моментных напряжений ............................................................... 30
Теоретическая прочность ......................................................................... 38
Упрочнение деформационное (активное) .............................................. 59
Упрочнение скрытое (латентное) ........................................................... 60
Упруговязкопластические физические модели .................................... 143
Уравнение Орована ................................................................................... 74
Физические теории пластичности ........................................................... 10
Функция распределения ориентаций ...................................................... 11
Энергетический критерий Франка .......................................................... 45
Энергия дефекта упаковки ....................................................................... 44
243
Учебное издание
Трусов Петр Валентинович,
Волегов Павел Сергеевич,
Кондратьев Никита Сергеевич
ФИЗИЧЕСКИЕ ТЕОРИИ ПЛАСТИЧНОСТИ
Учебное пособие
Редактор и корректор И.Н. Жеганина
__________________________________________________________
Подписано в печать 6.08.2013. Формат 70×100/16.
Усл. печ. л. 19,67. Тираж 100 экз. Заказ № 168/2013.
__________________________________________________________
Издательство
Пермского национального исследовательского
политехнического университета.
Адрес: 614990, г. Пермь, Комсомольский проспект, 29, к. 113.
Тел. (342) 219-80-33.