Кинточки - Камышинский технологический институт
реклама

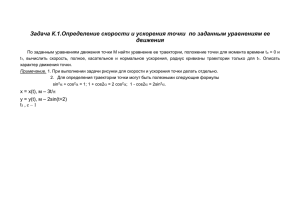
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «ВОЛГОГРАДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ» КАМЫШИНСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ (ФИЛИАЛ) ВОЛГОГРАДСКОГО ГОСУДАРСТВЕННОГО ТЕХНИЧЕСКОГО УНИВЕРСИТЕТА КАФЕДРА «ОБЩЕТЕХНИЧЕСКИЕ ДИСЦИПЛИНЫ» КИНЕМАТИКА ТОЧКИ Методические указания к практическим занятиям по дисциплине «Теоретическая механика» РПК «Политехник» Волгоград 2006 УДК 531.8 (07) К 41 КИНЕМАТИКА ТОЧКИ: Методические указания к практическим занятиям по дисциплине «Теоретическая механика» / Сост. Н. Г. Неумоина, А. В. Белов, С. Г. Корзун; Волгоград. гос. техн. ун-т. – Волгоград, 2006. – 23 с. Излагаются способы задания движения точки, определение кинематических характеристик при различных способах задания движения точки, а также приводятся примеры решения задач, задания на самостоятельную работу и контрольные вопросы. Составлены в соответствии с рабочей программой дисциплины «Теоретическая механика» и предназначены в помощь студентам, обучающимся по направлениям 260700, 150900, 140200. Ил. 14. Библиогр.: 3 назв. Рецензент: к. т. н., доцент Я. Н. Отений Печатается по решению редакционно-издательского совета Волгоградского государственного технического университета © Волгоградский государственный технический университет, 2006 2 Раздел «КИНЕМАТИКА» ПРАКТИЧЕСКОЕ ЗАНЯТИЕ №1 Тема: кинематика точки. Цель: изучить способы задания движения точки, научиться определять уравнение траектории точки, ее положение на траектории в заданный момент времени, а также основные кинематические характеристики движения точки при различных способах задания ее движения. Время проведения: 4 часа. 1. ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ изучить теоретический материал; ответить на контрольные вопросы; разобрать предложенные примеры решения задач; решить самостоятельно предложенные номера задач. 2. КРАТКИЕ ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ Кинематика – это раздел механики, в котором изучается движение материальных тел в пространстве с геометрической точки зрения, без учёта сил, определяющих это движение. Основными материальными объектами кинематики, так же как и всей теоретической механики, являются: материальная точка, система материальных точек, абсолютно твердое тело. Первым материальным объектом является материальная точка, кинематика которой и рассматривается в данных методических указаниях. Основная задача кинематики состоит в том, что бы зная закон движения данного тела (точки), определить все кинематические величины, характеризующие его движение. Чтобы кинематически задать движение точки, надо задать ее положение по отношению к выбранной системе отсчета в заданный момент времени. Существует три способа задания движения точки: естественный, векторный и координатный. Прежде чем начать изучение данных способов задания движения, необходимо напомнить, что движущаяся точка в пространстве описывает некоторую линию. Эта линия представляет собой место последователь3 ных положений движущейся точки в данной системе отсчёта и называется траекторией. По виду траекторий движение точки можно разделить на прямолинейное и криволинейное. 2.1. Способы задания движения точки 2.1.1. Естественный способ задания движения точки В естественном способе задания движения точки траекторией может быть как прямая (рис. 1), так и кривая (рис. 2) линии. - O M0 + M Рис. 1. M M0 O - + Рис. 2. Как видно из рисунков, неподвижная точка О является началом от счёта дуговой координаты OM S . Это расстояние может быть как положительным, так и отрицательным. Так как материальная точка движется с течением времени t, следовательно, расстояние от начала отсчёта изменяется также с течением времени t. Это значит, что дуговая координата S является функцией времени: S = (t). (1) Если вид функции (1) известен, то, соответственно, для каждого значения t, можно найти значение S, отложить это расстояние по траектории и указать где находится движущая точка М в этот момент времени. Таким образом, движение точки определено, если известны: траектория точки; начало и направление отсчёта дуговой координаты; уравнение движения S = (t). 4 2.1.2. Векторный способ задания движения точки При векторном способе задания движения положение точки в пространстве определяется заданием радиуса-вектора r , проведенного из неподвижного центра O в данною точку M (рис. 3). Радиус-вектор – это тоже есть функция, зависящая от времени: (2) r r( t ) . Траектория точки является геометрическим местом положения концов радиуса-вектора r . 2.1.3. Координатный способ задания движения точки В координатном способе задания движения точки ее положение определяется тремя декартовыми координатами (x, y, z), которые могут быть выражены в функции параметра времени в виде (см. рис. 3). z x f1( t ) M (3) y f2 ( t ) z f ( t ). 3 r Система (3) – это уравнеz k ния движения точки в трехмерной декартовой системе коорj O динат. Если точка М движется в y i плоскости, то её движение x определяется системой уравнеA B y ний: x x f1( t ) Рис. 3 (4) y f 2 ( t ). Прямолинейное движение выражается одним уравнением: (5) x f (t ) . Исключив параметр времени из системы (3) или (4), можно получить уравнение для траектории точки при ее движении в пространстве или на плоскости. Взаимосвязь между векторным и координатным способами задания движения точки можно установить из известного выражения для радиусавектора точки: (6) r xi y j z k . Здесь координаты x, y, z в функции времени определяются из системы (3). Для плоской задачи, соответственно, из системы (4). 5 Чтобы определить взаимосвязь между координатным и естественным способами задания движения точки, необходимо: Определить траекторию точки. Найти закон движения точки по траектории, для чего исключить параметр t из системы (3), применяя известное выражение дифференциала дуги ds ( dx )2 ( dy )2 ( dz )2 [ f 1 ] 2 [ f 2 ] 2 [ f 3 ] dt . (7) И после интегрирования получить (8) S [ f 1 ] 2 [ f 2 ] 2 [ f 3 ] 2 C , где С – const, определяется из начальных условий задачи. Основными кинематическими характеристиками движения точки являются ее скорость и ускорение. При различных способах задания движения точки они определяются различным образом. 2.2. Определение скорости точки 2.2.1. Определение скорости точки при задании её движения векторным способом Скорость – это векторная величина, характеризующая быстроту и направление движения точки в данной системе отсчёта. При векторном способе задания движения положение движущейся точки в каждый момент времени определяется радиусом – вектором, который в свою очередь является функциvcp ей времени r r ( t ) . z Предположим, что в определённый момент времени t точка занимает полоB M1 жение М, а в момент времени t1 t t v – положение М1. Из треугольника ОММ1 r , имеем ОМ1 = ОМ+ММ1, т.е. r 1 M A r O y x Рис.4 r1 r r ,где ММ1 – приращение радиуса – вектора точки r за промежуток времени ∆t. Можем найти среднюю скорость движения точки по хорде ММ1, равную отношению r к ∆t (см. рис. 4), т.е: r vср , (9) t 6 где направление vср совпадает по направлению с r . Чтобы определить скорость точки в данный момент времени, выполним предельный переход r dr (10) v im t 0 d t dt Таким образом, вектор скорости точки в данный момент времени равен первой производной по времени от радиуса-вектора данной точки. 2.2.2. Определение скорости точки при задании её движения координатным способом Учитывая известную из математики теорему о том, что проекция производной от вектора на какую-либо неподвижную ось равна производной от проекции вектора на ту же ось, а также выражение для вектора скорости через его проекции на оси координат: v vx i v y j vz k , (11) и уравнения(3), (6) и (10) получим выражения для определения проекций скорости на оси координат: vz z dy dx dz ; vy ; vz (12) vx v vy M dt dt dt vx Проекции скорости точки на r неподвижные оси координат равны z k y первым производным от соответj ствующих координат точки по вреi x мени. y Сокращённо можно получить: x (13) v x x , v y y , vz z . Рис. 5 Построив прямоугольный параллелепипед, рёбра которого параллельны осям координат, а диагональ совпадает со скоростью v , получим проекции скорости на соответствующие оси координат vX, vY, vZ (см. рис.5). Тогда модуль скорости точки: v vx 2 v 2y vz2 . (14) Направление вектора можно вычислить с помощью направляющих косинусов углов: 7 vx Cos( v , i ) v vy Cos( v , j ) v v Cos( v , k ) z . v (15) 2.2.3. Определение скорости точки при задании её движения естественным способом Для определения скорости точки в случае, когда движение задано естественным способом, необходимо чтобы было известно: траектория движения АВ, начало и направление отсчёта дуговой координаты и уравнение движения точки s f ( t ) (см. рис. 6). v Пусть в момент времени t r/ S B точка занимает положение М, в момент времени t1 = t + ∆t – поM1 ложение М1. Соответственно дуr M говые координаты этих положеr (S+ S) ний точки имеют значения: + S = OM; -O r (S) S1 = OM1 = OM + MM1 = S + S, C где S – приращение дуговой A координаты S = ММ1. Рис. 6. Проведя из центра С в точку М радиус-вектор r , определим скорость точки в момент времени t: dr v . (16) dt . Так как радиус-вектор r зависит от дуговой координаты S, т.е. r r ( s ) , то: v где r dr im . ds s 0 s 8 d r ds , ds dt (17) По направлению вектор r s совпадает с вектором r , но r MM 1 dr имеет модуль, равный еди im 1 , т.е. вектор s 0 s M M 1 MM 1 ds im нице и направлен по касательной к кривой АВ в сторону увеличения дугоdr вой координаты. Кроме того, вектор является ортом этого направлеds ния. Обозначим этот орт τ (см. рис. 6). Используя формулу (17) можно показать, что: ds (18) v , dt ds где производная представляет собой проекцию вектора скорости dt v на касательную: ds (19) v. dt Тогда модуль вектора скорости равен абсолютному значению производной от дуговой координаты точки по времени: ds v ~ v (20) dt 2.3. Определение ускорения точки 2.3.1. Определение ускорения точки при векторном способе задания ее движения Ускорением точки называется векторная величина, характеризующая изменение с течением времени модуля и направления вектора скорости точки. Пусть в некоторый момент времени t движущаяся точка находится в положении М и имеет скорость v , а в момент времени t1 приходит в положение М1 и имеет скорость v1 , тогда за промежуток времени Δt = t1-t скорость точки получает приращение v v1 v . Вектор v всегда направлен в сторону вогнутости траектории точки. Отношение приращения вектора скорости v к соответствующему промежутку времени Δt определяет вектор среднего ускорения точки за этот промежуток времени: 9 aср v t (21) Вектор среднего ускорения имеет, очевидно, то же направление, что и вектор v , то есть, направлен в сторону вогнутости траектории точки. M A v M1 v a v1 v1 a cp B Рис. 7 Ускорением точки в данный момент времени t называется векторная величина, к которой стремится среднее ускорение aср при стремлении промежутка времени Δt к нулю. a im Δt 0 v dv d 2 r t dt dt 2 (22) Следовательно, вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора точки по времени. Найдем, как располагается вектор a по отношению к траектории точки. При прямолинейном движении вектор a направлен вдоль прямой, по которой движется точка. Если траекторией точки является плоская кривая, то вектор ускорения a , также как и вектор aср лежит в плоскости этой кривой и направлен в сторону ее вогнутости. Если траектория не является плоской кривой, то вектор aср будет направлен в сторону вогнутости траектории и будет лежать в плоскости, проходящей через касательную к траектории в точке М и прямую, параллельную касательной в соседней точке М1. В пределе, когда точка М1 стремится к М эта плоскость занимает положение так называемой соприкасающейся плоскости. Следовательно, в общем случае вектор ускорения a лежит в соприкасающейся плоскости и направлен в сторону вогнутости кривой траектории точки. 10 2.3.2. Определение ускорения точки при задании ее движения координатным способом Вектор ускорения точки a dv . Отсюда на основании теоремы о dt проекции производной и формул (22) получаем: d vу d 2 у d vx d 2 x d vz d 2 z ax 2 ; aу 2 ; az 2 . dt dt dt dt dt dt Или ax vx x; a у v у у; az vz z . (23) (24) Таким образом, проекции ускорения точки на оси координат равны первым производным от проекций скорости или вторым производным от соответствующих координат точки по времени. Модуль и направление вектора ускорения найдутся из формул: a a 2 a 2 a 2 ; x у z (25) a cos 1 a x ; cos 1 у ; cos 1 a z , a a a где α1, β1, γ1 – углы, образуемые вектором ускорения с осями координат. При движение точки в плоскости, ее скорость и ускорение можно определить на основе системы (4). Расположение векторов скорости и ускорения и их составляющих показаны на рис.8. v y vy v vx v у M cos( v ,i ) ax ay 2 vx cos( v , j ) a vx v vу j a ax a у 2 x i cos( a ,i ) Рис.8 cos( a , j ) 11 aу a . 2 v 2 ax a 2.3.3. Определение ускорения точки при задании ее движения естественным способом +O M t b - B t e K cp t1 K M1 A t1 Рис.9 ращением орта (см. рис. 9). Введем вектор K ср Возьмем на кривой AB две точки M и M1, соответствующие дуговым координатам OM =S и OM1 = S+S. Покажем орты касательных и 1 в этих точках. Модуль орта , равный 1, постоянен, но направление орта изменяется при перемещении точки по кривой, то есть орт является переменным вектором = (S). Определим приращение орта на участке MM1 = S. Для этого отложим от точки М орт 1 и построим при этой точке параллелограмм, одной из сторон которого будет орт , а диагональю – орт 1 ,тогда другая сторона параллелограмма будет при- . Он характеризует поворот касательной к S кривой на участке ММ1 и называется вектором средней кривизны кривой на участке ММ1. Переходя к пределу и учитывая, что = (S), получим вектор кривизны кривой в данной точке. d K . (26) dS Определим модуль этого вектора. Для этого рассмотрим треугольник, образованный , 1 , . Угол между векторами и 1( ) называется углом смежности. b M t n K C Модуль как длину основания равнобедренного треугольника с малым углом при вершине и боковыми сторонами, равными 1. Тогда: 2 sin / 2 2 1 / 2 . и модуль вектора кривизны Рис.10 найдем K im S 0 12 1 im , S S 0 S где – радиус кривизны кривой в точке М. Из дифференциальной геометрии известно, что предел отношения угла смежности к приращению дуговой координаты S при S → 0 равен кривизне кривой 1/, где – радиус кривизны кривой в точке М. Вектор кривизны K ср находится в плоскости треугольника ( , 1 , ). Предельным положением этого треугольника является соприкасающаяся плоскость. Следовательно, вектор кривизны K расположен в соприкасающейся плоскости, а так как он перпендикулярен к вектору , то он направлен по главной нормали к центру кривизны кривой, и показывает скорость поворота касательной в расчете на единицу длины пройденного пути (см. рис. 10). 1 (27) K n . Учитывая результаты, полученные в п. 2.2.3., а также введенные выше понятия, определим проекции ускорения на естественные координатные оси. Так как по уравнению (18) ds , то v τ dτ dv dτ ds d2 s d τ d s d s d2 s τ 2 τ 2 dt dt dt ds dt dt dt dt Но по формулам (26) и (27) d 1 K n ds a а ( ds / dt )2 v 2 , получим v2 d 2s (28) τ 2 ρ dt Первое слагаемое в уравнении (28) называется нормальным ускорением, а второе – касательным ускорением, т.е. (29) a an a , a n где an n v2 . ρ d 2s dv aτ τ 2 τ . dt dt 13 (30) (31) Скалярные множители в уравнениях (30) и (31) являются проекциями ускорения точки на главную нормаль и касательную. Направлены векторы an и a следующим образом: an всегда направлен в сторону вогнутости кривой, так как 1/ρ всегда больше нуля. А вектор a может быть направлен также как орт или в противополож- d 2s . Модуль и dt 2 направление вектора полного ускорения определяются следующим образом a an2 a2 a (32) cos( a , n ) a an cos( a , n ) a ную сторону в зависимости от знака производной 3. ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ Задача № 1. Движение точки по плоскости Oxy задано уравнениями x b sin kt; y d cos kt , где b, d, k – постоянные положительные величины. Определить уравнение траектории в координатной форме, значения скорости и ускорения точки в момент времени t 2k . Решение Уравнение траектории точки в координатной форме находим путем исключения времени из уравнения движеy ния. Для этого делим первое уравнение на v1 M1 b, второе – на d, возводим в квадрат и M v складываем. Получаем уравнение эллипса a1 a r M0 (рис. 11) с полуосями, равными b и d: x O a0 x2 y2 1. v0 b2 d 2 Рис. 11 При t точка имеет координаты х = 2k b, у = 0, т. е. занимает положение М0. Определим проекции скорости и уско14 рения на оси координат. Имеем: vx x bk cos kt , v y y dk sin kt , ax x bk 2 sin kt k 2 x , a y y dk 2 cos kt k 2 y . Для момента времени t 2k получаем: vx 0 , v y dk , v vx2 v 2y dk , ax b k 2 , a y 0 , a ax2 a 2y b k 2 . O1 a=an a an M O v=0 M1 По проекциям устанавливаем направление скорости по касательной к траектории и направление ускорения по радиусувектору к точке О. Изображаем эти векторы в точке М0 и дополнительно в точках М и М1. a=a Задача № 2. Точка М движется по дуге окружности радиусом R по закону S = R sin kt, где k = const. Начало и направРис. 12 ление положительного отсчета, расстояний и времени указаны на рис. 12. Определить скорость и ускорение точки в момент времени t, а также их значения в точке О и в точке траектории М1, в которой скорость обращается в ноль. t=0 a Решение Скорость и проекции ускорения на естественные координатные оси определяем по формулам: v S v , Имеем, dv v2 a S , an . dt v S R k cos kt, a S R k 2 sin kt , R 2 k 2 cos 2 kt R k 2 cos 2 kt . R Скорость обращается в нуль, если cos kt 0 , т.е. в момент времени an t1 2k v2 и другие моменты времени, которые в этом примере не рассмат- 15 риваются. При t1 , т.е. в момент изменения направления движе2k ния a Rk 2 , an 0 . Подставляя в формулы для v , a , an значение t = 0, получаем: v = R·k, a = 0, an = R·k 2. Касательное ускорение в этот момент времени обращается в нуль, т. к. алгебраическая скорость достигает своего максимума. Задача № 3. Движение точки М задано в декартовых координатах уравнениями: x R cos ( t 2 ), y R sin ( t 2 ) , (33) 2 2 где R, – постоянные положительные величины, имеющие размерности, R – длины, – углового ускорения. Перейти к естественному способу задания движения, т. е. определить траекторию и закон движения точки вдоль траектории в виде S = f(t). Найти также скорость и ускорение точки. Решение Возведя каждое из уравнений (33) почленно в квадрат, и затем сложив их, получим x 2 y 2 R 2 . Следовательно, траекторией точки является окружность радиуса R с центром в начале координат. Из уравнений (33) видно, что при t = 0, x = R, y = 0, т. е. точка М находится на оси Ox. Примем это положение M0 за начало отсчета O расстояния S; тогда при t = 0, S =0. Когда t 0 y начинает возрастать, а x – убывать, т.е. точка начинает двигаться по направлению к оси Oy; примем это направление за положительное направление отсчета расстояния S. Для определения зависимости S = f(t) найдем выражение для dS. Как известно, а Тогда dx x dt , dy y dt . dS 2 dx2 dy 2 , dS x 2 y 2 dt , и поскольку при t = 0, S = 0: t S x 2 y 2 dt (34) 0 Из уравнения (34) находим: и x R t sin ( t 2 ), y R t cos ( t 2 ) , 2 2 2 2 2 2 2 x y R t . 16 Подставляя это выражение в равенство (34) и вынося постоянный множитель за знак интеграла, получим: R t 2 . 2 0 Таким образом, точка движется по окружности радиуса R по закону t S R tdt , S или S R t 2 . Скорость точки v S R t 2 и растет пропорционально v2 R 2 t 2 . R Так как a = const и знаки v, a совпадают (v 0, a 0), то движение точки является равноускоренным. a 1 Наконец, a a2 an2 R 1 2 t 4 , tg . an t 2 времени. Далее находим ускорение a v R , an Как видим, при t = 0, a = a = R (an = 0) и . Затем со време2 нем величина a растет, а угол между вектором ускорения и радиусом окружности убывает, стремясь к нулю. Задача № 4. Точка, получив направленную горизонтальную скорость, движется по закону, определяемому уравнениями: x = v0 t, y g t2 , 2 где v0 и g – некоторые постоянные. Найти траекторию, скорость и ускорение точки, а также касательное и нормальное ускорения и радиус кривизны траектории в любом положении, выразив их через скорость в этом положении. O x n an M vy Решение vx v at a y Рис. 13 t Определяя из первого уравнения t и подg ставляя во второе, получим y x 2 . Траек2v02 тория точки – парабола (рис. 13). Дифференцируя уравнения движения по времени, найдем: vx x v0 , v y y g t , 17 откуда: v v02 ( g t )2 . Таким образом, в начальный момент времени (t = 0) скорость точки v = v0, а затем с течением времени скорость непрерывно возрастает. Найдем ускорение точки: a x x 0 , a y y g . Следовательно, ускорение точки a = g. В данном случае точка движется с постоянным по модулю и направлению ускорением, параллельным оси Oy (это ускорение силы тяжести). Обращаем внимание на то, что хотя здесь a = const, движение точки не является равнопеременным, так как условием равнопеременного движения является не a = const, a a = const. В этом же движении, как мы сейчас увидим, a не постоянно. Зная зависимость v от t, найдем a: a dv dt g2 t v02 ( g t )2 g2 t . v 1 v 2 v02 . g Подставляя это значение t, выразим a через скорость v: Но так как v v02 ( g t )2 , следовательно, t v2 a g 1 0 . v2 Отсюда следует, что в начальный момент, когда v = v0, a = 0. Затем, с увеличением v величина a растет и при v , a g, следовательно, в пределе величина касательного ускорения стремится к полному ускорению g. Для нахождения an обратимся к зависимости: a 2 an2 a2 . Отсюда: v2 v 2 an2 a 2 a2 g 2 g 2 1 02 g 0 , v v и v an g 0 . v Таким образом, в начальный момент времени (t=0) v = v0, an = g, а затем с увеличением v величина an убывает, стремясь в пределе к нулю. Для нахождения радиуса кривизны траектории воспользуемся формулой: 18 an v2 . v2 v3 . an v0 g В начальный момент времени радиус кривизны имеет наименьшее значе- Отсюда: v2 ние min 0 ; затем с увеличением скорости радиус кривизны растет и, слеg довательно, кривизна траектории уменьшается. При v , , а кривизна стремится к нулю. Задача № 5. Снаряд, вылетевший из ствола орудия, стоящего у подножия возвышенности, поверхность которой наклонена под постоянным углом к горизонту, движется согласно уравнениям (сопротивлением воздуха пренебрегаем): x = v0 cos t, (35) A j O g t2 . (36) 2 где – угол между горизонтом и направлением вылета снаряда. Определить, под каким углом следует выстрелить, чтобы получить наибольшую дальность полета вдоль линии ОА (рис. 14). y v0 sint y b a x Рис. 14. Решение Исключив время t из уравнений (35) и (36), находим уравнение траектории в явной форме: y tgx g x2 (37) 2v02 cos 2 Уравнение прямой ОА, являющейся проекцией поверхности возвышенности на вертикальную плоскость xОy, будет: y = x tg . (38) Снаряд упадет на землю в точке А, при этом координаты, определяемые уравнениями (37) и (38), станут равными, следовательно: g x2 x tg x tg , 2 2 v0 cos 2 19 откуда: 2 v02 v2 cos 2 0 (sin 2 2 cos 2 tg ) . g g Для определения наибольшей дальности в зависимости от угла вылета вычисляем производную от х по и приравниваем ее к нулю: dx v02 ( 2 cos 2 2 sin 2 tg ) 0 , d g откуда: ctg 2 = -tg , или: 1 2 , ( ) . 2 2 2 Таким образом, наибольшая дальность будет при угле бросания, равном половине угла между вертикалью (отрицательной осью Oy) и откосом ОА. x ( tg tg ) 4. ЗАДАНИЕ НА САМОСТОЯТЕЛЬНУЮ РАБОТУ По изложенной в методических указаниях теме в соответствии с рабочей программой предусмотрена самостоятельная работа. Задание на самостоятельную работу студент получает от преподавателя на занятии. Чтобы выполнить самостоятельную работу необходимо решить следующие задачи по 3: 10.1 – 10.22, 11.1 – 11.10, 12.1 – 12.26. 5. КОНТРОЛЬНЫЕ ВОПРОСЫ 1. 2. 3. 4. 5. 6. 7. 8. 9. В чем заключается основная задача кинематики? Что значит «кинематически задать движение точки»? Перечислите основные способы задания движения точки. В чем заключается естественный способ задания движения точки? В чем заключается координатный способ задания движения точки? В чем заключается векторный способ задания движения точки? Каким уравнением определяется взаимосвязь между векторным и координатным способами задания движения точки? Каким уравнением определяется взаимосвязь между координатным и естественным способами задания движения точки? Как определяется средняя скорость точки при векторном способе задания ее движения? Укажите направление вектора. 20 10. Как определяется скорость точки в данный момент времени при векторном способе задания ее движения? Укажите направление вектора. 11. Как определяется среднее ускорение точки при векторном способе задания ее движения? Укажите направление вектора. 12. Как определяется ускорение точки в данный момент времени при векторном способе задания ее движения? Укажите направление вектора. В какой плоскости располагается вектор? 13. Как определяется модуль и направление вектора скорости точки при координатном способе задания ее движения? 14. Как определяется модуль и направление вектора ускорения точки при координатном способе задания ее движения? 15. Запишите выражения для определения вектора скорости точки по модулю и направлению при координатном способе задания ее движения в случае двумерной постановки задачи. 16. Запишите выражения для определения вектора ускорения точки по модулю и направлению при координатном способе задания ее движения в случае двумерной постановки задачи. 17. Что такое вектор кривизны кривой в данной точке? 18. Как определяется модуль и направление вектора кривизны кривой в данной точке? 19. Как определяются проекции ускорения точки на естественные координатные оси? 20. Определите физический смысл нормального ускорения точки. 21. Определите физический смысл касательного ускорения точки. 22. Получите закон равнопеременного криволинейного движения в случае, если оно является ускоренным. 21 6. ИСПОЛЬЗУЕМАЯ ЛИТЕРАТУРА 1. Яблонский А. А. Курс теоретической механики. Ч. II. – М.: Высшая школа, 1987. – 531 с. 2. Бать М. И., Джанелидзе Г. Ю., Кельзон А. С. Теоретическая механика в примерах и задачах. Т. 2. – М.: Наука, 1993. – 623 с. 3. Мещерский И. В. Сборник задач по теоретической механике. – М.: Наука, 1990. – 417 с. 22 Составители: Наталья Георгиевна Неумоина Александр Владимирович Белов Светлана Григорьевна Корзун КИНЕМАТИКА ТОЧКИ Методические указания к практическим занятиям по дисциплине «Теоретическая механика» Под редакцией авторов Темплан 2006 г., поз. № 12. Подписано в печать 25. 09. 2006 г. Формат 60×84 1/16. Бумага листовая. Гарнитура ”Times“. Усл. печ. л. 1,44. Усл. авт. л. 1,25. Тираж 100 экз. Заказ № Волгоградский государственный технический университет. 400131 Волгоград, просп. им. В.И. Ленина, 28. РПК «Политехник» Волгоградского государственного технического университета. 400131 Волгоград, ул. Советская, 35. 23