L1-4
реклама

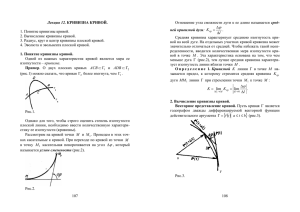
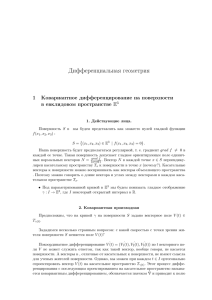
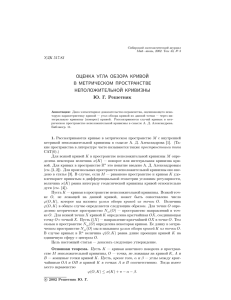
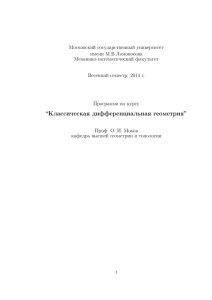
Естественный способ. Этим методом можно пользоваться, если заранее известна траектория движения частицы. В подобных случаях за координатную ось удобно принять кривую самой траектории. Пусть движение совершается вдоль кривой L (рис.1.7). Выберем точку отсчета О и положительное направление оси. Положение частицы на кривой однозначно определится длиной части кривой, соединяющей частицу с точкой отсчета О, которая называется дуговой координатой частицы. И так, закон движения в естественном методе задается в виде t . (1.19) Рис. 1.8. Изменение положения частицы за время t определяется приращением дуговой координаты, которая есть путь, пройденный частицей: t t t В естественном методе скорость - это первая производная дуговой координаты по времени: d t 0 t dt v lim (1.20) Введем связанный с частицей единичный вектор , который будет направлен по касательной в любой точке траектории. Очевидно, что зависит от положения точки на кривой, т.е. сложная функция от времени = t . = . меняет свое направление и Учитывая (1.19), видим, что Вектор скорости выразим с помощью введенного касательного вектора следующим образом v v . (1.21) Воспользовавшись определением ускорения (1.8) и (1.21) получим . . . a v v v (1.22) Учитывая, что - сложная полученного уравнения функция от времени, преобразуем последний член . v vd / dt v 2 d / d (1.22') рис. 1.9а. Выразим величину через геометрические характеристики кривой. d / d Предположим, в момент времени t частица находится в точке А кривой, которой соответствует единичный вектор частица в момент времени t . t t Пройдя путь d за промежуток времени dt займет положение В (рис. 1.9а). Предположим, что рассматриваемая кривая плоская, т.е. все ее точки лежат в одной плоскости. Проведем нормали от точек А и В (перпендикуляры к касательным в плоскости кривой), точку пересечения которых обозначим через O1 . В дифференциальной геометрии показывается, рис.1.9б. что элементарный отрезок любой непрерывной кривой можно представить как дугу окружности определенного радиуса. Так что, рассматриваемая часть кривой АВ есть дуга окружности с центром в точке O1 и радиусом O1 A O1 B R а R – радиусом (рис. 1.9а). Точка O1 называется центром кривизны этой части кривой, кривизны. Фактически, любую кривую можно представить как совокупность дуг с разными центрами и радиусами кривизны. Построив векторный треугольник AMN, показывающий приращение вектора d за время для dt (рис. 1.9б), легко заметить, что он подобен треугольнику О1АВ. Исходя из этого, d / d получим: d , d O1 A d 1 . d R За время dt приращение d перпендикулярно касательному вектору в точке А (рис. 1.8б), т.е. направлено по нормали в этой точке к центру кривизны. Введя единичный вектор n , направленный по нормали, получим d n . d R (1.23) С учетом полученного результата и (1.22), выражение ускорения (1.22') примет следующий вид dv v2 a n dt R (1.24) И так, ускорение в произвольной точке кривой представилось в виде суммы двух взаимно-перпендикулярных векторов (рис.1.9). Подобное представление вектора ускорения имеет большие преимущества. Ускорение – это величина, показывающая быстроту изменения скорости во времени. Скорость может меняться как по величине, так и по направлению. Первый член в правой части формулы ускорения (1.24) называется тангенциальным ускорением. Тангенциальное ускорение направлено по касательной к траектории, характеризирует быстроту изменения величины скорости и равно первой производной модуля скорости по времени: рис. 1.10. a dv . dt (1.25) Второе слагаемое называется нормальным ускорением: v2 an R . (1.26) Нормальное ускорение пропорционально квадрату скорости частицы и обратно пропорционально радиусу кривизны кривой в данной точке. Оно перпендикулярно вектору скорости, направлено к центру кривизны и характеризирует быстроту изменения направления скорости