Вест_БГУ_e25vs - Белорусский государственный университет
реклама

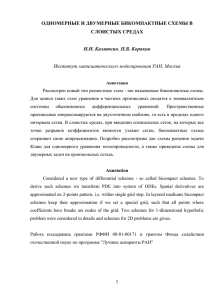
УДК 519.63 СПЕКТРАЛЬНО-РАЗНОСТНЫЙ МЕТОД ЧЕТВЕРТОГО ПОРЯДКА ТОЧНОСТИ ДЛЯ ЧИСЛЕННОГО МОДЕЛИРОВАНИЯ ДИНАМИКИ ОПТИЧЕСКИХ ПУЧКОВ В ЦИЛИНДРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ В.М. Волков, А.А. Станкевич Белорусский государственный университет, Минск, Беларусь, [email protected]; Введение. Задачи линейной и нелинейной волновой динамики в широком диапазоне пространственно-временных масштабов волновых структур допускают эффективный анализ в рамках параболического (шрёдингеровского) приближения волнового уравнения [1]. Одним из важных примеров таких задач – моделирование процессов распространения интенсивных лазерных пучков и импульсов в нелинейных средах [2]. Наиболее эффективные методы численного анализа данного класса задач, получившие широкое распространение в последние десятилетия, это симметричные консервативные разностные методы [3] и методы дробных шагов с использованием алгоритмов быстрого дискретного преобразования Фурье [4]. Во многих приложениях лазерной физики и нелинейной оптики поперечные сечения волновых пучков имеет достаточно правильную форму, близкую к радиальносимметричной. Использование цилиндрических координат дает существенные преимущества при численном анализе подобных задач. В частности, свойства симметрии позволяют понизить размерность задачи в радиально-симметричном случае, а слабые нарушения симметрии могут быть описаны сравнительно небольшим числом азимутальных компонент Фурье представления решения. В связи с этим при использовании метода дробных шагов для решения линейной части задачи в цилиндрических координатах наиболее эффективный подход состоит в выполнении Фурье преобразования по угловой переменной. В результате этого двумерная задача сводится к совокупности одномерных, не связанных между собой подзадач для коэффициентов Фурье, которые находятся с помощью симметричной конечноразностной схемы второго порядка точности [3]. Дальнейшее повышение эффективности данного подхода возможно, например, на основе использования схем повышенного порядка точности по радиальной координате. Однако, формальное использование техники построения схем четвертого порядка аппроксимации на компактном шаблоне в полярных координатах не позволяет фактически достичь заданной точности алгоритма [5]. Это связано с наличием сингулярности в дифференциальном операторе задачи при r 0 . Ниже представлен метод преодоления отмеченных сложностей. Постановка задачи. Спектральный метод. Распространение оптических пучков в нелинейных средах описывается уравнением для комплексной огибающей амплитуды поля E E (r , , z ) : i E 1 E 1 E 2 r 2 f (| E |2 ) E , 0 r R , 2 z r r r r E (0, , z ) 0, E (r , ,0) E0 (r , ) , (1) (2) где f (| E |2 ) – функция, характеризующая нелинейные свойства среды, E0 (r , ) – начальное поперечное распределение поля пучка, достаточно быстро убывающее при r R . Если Im( f (| E |2 ) 0 , то для задачи (1), (2) выполняется закон сохранения мощности излучения [1,3]: dP d R 2 2 r | E | ddr 0. dz dz r 0 0 (3) Наследуемость интегральных инвариантов вида (3) в дискретных моделях является естественным требованием, выполнение которого, согласно принципу консервативности, во многом обеспечивает высокую эффективность численных алгоритмов [3]. Один из наиболее эффективных способов решения задачи (1), (2) основан на методе дробных шагов, в котором исходное уравнение разбивается на линейную и нелинейную симметричной части, схемы последовательное решение расщепления обеспечивает которых второй с использованием порядок точности приближенного решения относительно шага сетки по эволюционной координате z [4]. При этом основные вычислительные затраты и точность метода относительно шагов дискретизации по пространственным координатам во многих случаях связаны только с решением линейной части задачи. В случае декартовых координат несомненным преимуществом для решения линейной части задачи обладают спектральные методы, использующие быстрые алгоритмы дискретного преобразования Фурье [4]. При надлежащем выборе шага дискретизации спектральные методы являются практически точными для решений с ограниченной шириной спектра решения. Учитывая скорость убывания компонент Фурье спектра, порядок точности спектральных методов для достаточно гладких периодических решений оценивается величиной O(h N / 21 ) , где h и N – шаг дискретизации и число узлов сетки по пространственным координатам [3]. Для цилиндрических координат естественно использовать аналогичный подход относительно угловой переменной . В этом случае решение линейной части задачи сводится к совокупности одномерных задач по радиальной переменной для Фурье коэффициентов искомого решения: N / 2 1 i где Em 1 Em m 2 r 2 Em 0 , E m (r , z ) E (r , nh , z ) exp( i n m h ) , z r r r r m N / 2 h 2 / N , m ( N 2), ( N 2 1) , N – число узлов сетки (4) по переменной . Для решения задач вида (4) традиционно используются симметричные консервативные разностные схемы второго порядка точности относительно величины шагов сетки по переменным r и z [3]. Поскольку точность приближенного решения в целом ограничена главным образом точностью метода, используемого на этапе решения линейной задачи (4), то для этих целей несомненный интерес представляет построение схемы более высокого порядка точности относительно шага дискретизации по радиальной переменной. Разностная схема четвертого порядка точности. Построение компактных разностных схем повышенного порядка точности в цилиндрических (полярных) координатах сопряжено с проблемой, порождаемой сингулярностью дифференциального оператора в точке r 0 . Главный член погрешности аппроксимации производных уравнения (4) на трехточечном шаблоне равномерной сетки по r имеет вид m hr2 4 Em hr2 3 Em . Выражение для m через 12 r 4 6r r 3 производные более низкого порядка (до второго порядка включительно) содержит hr2 2 Em 5hr2 Em , и т.д., аппроксимация которых на трехточечном 6r 2 r 2 12r 3 r слагаемые шаблоне не дает возможности полностью исключить главный член локальной погрешности дискретной задачи в точках r O(hr ) (см., например, [5]). Для преодоления отмеченных выше трудностей введем новую переменную r 2 . При этом уравнение (4) принимает вид i Em E m2 4 m E 0, z m (5) в котором отсутствует сингулярность дифференциального оператора, по крайней мере, в части производной по радиальной координате. Для построения дискретной модели r {rk hr (k 1), k 0, N , hr R / N} . равномерная r сетка используем Заметим, отображается { k k 1 hk , k 2, N , hk hr (rk 1 hr } . что при на На равномерную замене переменных квазиравномерную сетке сетку: сетку аппроксимируем уравнение (5) симметричной разностной схемой ih z1 u k ,n1 u k ,n k1 k 1 / 2 hk11 u k 1 u k k 1 / 2 hk1 u k u k 1 m 2 k1 u k 0 , (6) где uk , n u ( k , zn ) , u k u k ,n u k ,n1 / 2 , k k 1 k 1 / 2 , k 1/ 2 ( k k 1 ) / 2 , k 1, N 1 . Разностная схема (6) определена на множестве внутренних узлов сетки и требует задания краевых условий при r0 0 , и rN R . Для m 0 естественно использовать однородные краевые условия u 0,n u N ,n 0 . Для m 0 вопрос постановки краевого условия при r0 0 будет рассмотрен ниже. Дискретный аналог интегрального инварианта (3) для схемы (6) имеет вид Ph N r 1 1 N r 1 2 | u | k k rk hr | uk |2 const . 2 k 2 k 2 (7) Для доказательства (7) достаточно умножить (6) на * k u k , полученное произведение просуммировать по внутренним узлам сетки и взять мнимую часть равенства, учитывая * разностные аналоги формул Грина и тождество: u z u | uk , n 1 |2 | uk , n |2 /( 2hz ) . Несложно показать, что разностная схема (6) имеет второй порядок аппроксимации. Главный член погрешности аппроксимации относительно шага дискретизации по радиальной переменной имеет вид: m 4hr2 E m( 2) 4 3 E m(3) 1 3 2 E m( 4 ) , где Em( n) n Em / n . Дважды дифференцируя уравнение (5) по и выражая Em(3) и Em( 4) через производные до второго порядка включительно, главный член погрешности может быть представлен в форме, доступной для аппроксимации на компактном трехточечном шаблоне по крайней мере во внутренних узлах сетки: hr2 m2 ~ m2 2 m i( u ) z 4 m u u 2 u , m m O(hr4 hr2hz2 ) . 3 Здесь u~ uk 1, n uk 1, n 1 ( k 1 k 1 )1 , u z uk , n 1 uk , n hz1 , k 1, N r 1 . Вычитая из разностной схемы (6) главный член погрешности дискретизации m , мы приходим к схеме, которая формально имеет четвертый порядок точности: ihz1 uk , n 1 uk , n k1 k 1/ 2hk11 u k 1 u k k 1/ 2hk1 u k u k 1 m2 k1u k m . (8) Относительно разностной схемы (8) можно отметить, что она не является консервативной и требует постановки краевых условий в точке r0 0 . Кроме того, слагаемое m2 u ~ , входящее в m , при m 1 не может быть корректно аппроксимировано в силу асимптотики решения уравнений (4,5) при r 0: E m (r ) Cr m C m 2 . Для преодоления отмеченных сложностей в окрестности точки r0 0 аппроксимируем решение задачи (5) отрезком степенного ряда: K E m ( k ) C j km / 2 j . (9) j 0 Для достижения четвертого порядка точности количество слагаемых в разложении (9) должно быть не менее четырех для m 0,1 . Подстановка выражения (9) в уравнение (5) и переход к равенству слагаемых, содержащих одинаковые степени , приводит к следующей незамкнутой системе дифференциальных уравнений для комплексных коэффициентов C j : dC j i(m 2 j ) 2 C j 1 , j K 1,1 . dz (10) Таким образом, алгоритм реализации разностной схемы (8) при m 0,1 на одном шаге по z выглядит следующим образом: 1. На множестве узлов k из системы уравнений K u k ,n ( k ) C j ,n km / 2 j , k | m |, K 2 , K 4 , (11) j 0 методом наименьших квадратов находятся коэффициенты C j , j 0, K . 2. Используя симметричную разностную схему для системы уравнений (10) находим коэффициенты разложения решения C j , n 1 : C j ,n1 C j ,n ih z (m 2 j ) 2 (C j 1,n1 C j 1,n ) , j K , | m | , C 5,n C 5,n 1 0, 2 (12) 3. Используя коэффициенты C j , n 1 , находим решение задачи K u k ,n1 ( k ) C j ,n1 km / 2 j , k 0, K 1 . (13) j 0 4. Решение задачи u k ,n 1 ( k ) k K 2, N находится как решение системы линейных алгебраических уравнений: AUn1 A*U n , U n (u1,n1 ,,u K 1,n1 u K 2,n ,, u Nr ,n )T с трехдиагональной матрицей A : a k ,k 1 , a k ,k 1 0 , k 1, K 1 , a N , N 1 0, a N , N 1 , ak , k 1 ( k 1 k ) ihr2 hr2 (4 m2 ) hr2m2 1 , 6h hk k 6hk k 12 k k z ak , k (ak , k 1 ak , k 1 ) ak , k 1 i m2 hr2m2 , hz 2 k 6 k2 ( k 1 k ) ihr2 hr2 (4 m2 ) hr2m2 1 , k K 2, N 1 , hk 1 k 6hz 6hk 1 k 12k k (14) При достаточно больших N основные вычислительные затраты рассмотренного алгоритма определяются решением системы уравнений (14). В силу этого вычислительная сложность предложенного алгоритма практически не отличается от реализации разностного метода второго порядка точности. Результаты численного эксперимента. В качестве тестового примера рассмотрим решение уравнения (5) с начальными условиями E m r , z 0 rR01 m exp (1 i / 2)r 2 R0 2 . На рис. 1 представлена динамика относительной погрешности разностных методов (6) и (8) в зависимости от числа узлов сетки при z 1 и расчетных параметрах R 15 , R0 1 , hz 0.0005(N/1024) 2 . Для оценки погрешности использовалась норма, аналогичная сеточному аналогу инварианта задачи (7): || || N 1 k 1 k | Em ( k ) u k |2 . (15) В качестве точного решения для оценки погрешности использовалось решение, полученное с помощью метода Фурье для соответствующей задачи в декартовой системе координат. Как видно из рисунка а), решение разностных схем (6) и (8) сходится к точному решению соответственно со вторым и четвертым порядком точности для угловых мод | m | 1 . При этом погрешность модифицированной схемы (11)-(12) в этом случае практически совпадает с погрешностью решения (8). В случае m 1 картина сходимости иная. Модифицированный метод (11)-(12) по-прежнему демонстрирует четвертый порядок точности, в то время как для разностной схемы (8) с уменьшением шага скорость сходимости замедляется и в асимптотике не превосходит скорость сходимости схемы второго порядка точности (см. рис. б.) б. a. Рис. Зависимость относительной погрешности разностных методов от числа узлов сетки: а. относительная погрешность разностных схем (6) и (8) для угловых мод m 2,3,4 ; б. относительная погрешность разностных схем (6), (8) и (11)-(14) для m 1 . В случае m 0 разностная схема (11)-(14) также демонстрирует скорость сходимости не хуже четвертого порядка. Использование полиномиальной аппроксимации приближенного решения позволяет избежать в данном случае необходимости явного задания краевого условия в точке 0 при использовании расчетной сетки, включающей начало координат. Несмотря на отсутствие консервативности схем (8) и (11)-(14) отклонения величины дискретного аналога инварианта задачи (7) в рассмотренных примерах не выходили за пределы абсолютной погрешности решения в норме (15). Заключение. Предложенный спектрально-разностный метод четвертого порядка точности обладает рядом преимуществ по сравнению с традиционно используемым аналогом второго порядка точности. В частности, данный метод позволяет как минимум в четыре раза сократить вычислительный затраты при расчете приближенных решений в диапазоне относительных погрешностей 10 2 10 3 . Преимущества данного метода становятся еще более ощутимыми при возрастании требований к точности. Преобразования координат обеспечивает органичную адаптацию равномерной сетки к структуре типичных решений задачи при моделировании динамики оптических пучков, локализованных в приосевой области цилиндрических координат. Некоторые дополнительные преимущества предложенного подхода при моделировании нелинейных задач будут рассмотрены в отдельной работе. Работа выполнена при поддержке БРФФИ (грант Ф10Р-103). Литература 1. Виноградова М.Б., Руденко О.В., Сухоруков А.П. Теория волн. М., 1990. 2. Ахманов С. А., Выслоух В. А., Чиркин А. С. Оптика фемтосекундных лазерных импульсов. М., 1988. 3. Карамзин Ю.Н., Сухоруков А.П., Трофимов В.А.. Математическое моделирование в нелинейной оптике. М., 1989. 4. Fleck J.A., Morris J.R., Feit M.J. //Applide Phys., V. 10.N2,1976. P.129. 5. M.-C. Lai, J-M.Tseng //Journal of Computational and Applied Mathematics, V. 201, №1, 2007, P. 175. Волков Василий Михайлович – доктор физико-математических наук, профессор кафедры веб-технологий и компьютерного моделирования, Тел. 029-683-51-26. [email protected] Станкевич Алексей Александрович – аспирант кафедры веб-технологий и компьютерного моделирования. Научный руководитель - В.М.Волков. Volkov V.M., Stankevich A.A. A forth-order accuracy spectral-different method for numerical simulations of optical beams dynamic in the cylindrical co-ordinate system. The proposed method is based on the Fourier transformation in the angular variable and a formally forth-order accuracy compact finite-difference scheme for calculation of the Fourier coefficient evolution. The actual forth-order accuracy is achieved by means of a special treatment of the low-order angular modes at the coordinate singularity point using polynomial approximation of the solution. Numerical experiments demonstrate efficiency of the proposed approach. УДК 519.63 В о л к о в В. М., С т а н к е в и ч А. А. Спектрально-разностный метод четвертого порядка точности для моделирования динамики оптических пучков в цилиндрической системе координат // Вестн. БГУ. Сер. 1. 2011 № Предлагаемый метод основан на использовании преобразования Фурье по угловой переменной и расчете эволюции коэффициентов Фурье посредством разностной схемы, формально имеющей четвертый порядок точности по радиальной переменной. Фактическая сходимость метода четвертого порядка достигается с помощью специальной процедуры расчета угловых мод низшего порядка с использованием полиномиального приближения искомого решения в окрестности точки сингулярности дифференциального оператора в цилиндрической системе координат. Численный эксперимент демонстрирует эффективность предложенной методики. Библиогр. 5 назв., ил. 1.