О СНОВЫ ТЕОРИИ ПОМЕХОУСТОЙЧИВОСТИ
реклама

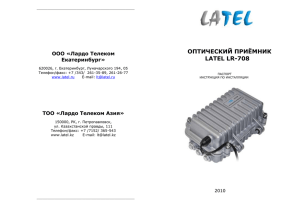
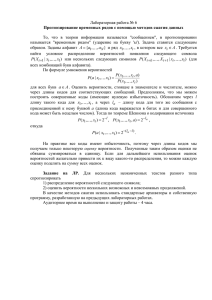
ОСНОВЫ ТЕОРИИ ПОМЕХОУСТОЙЧИВОСТИ Презентация лекции по курсу «Общая теория связи» © Д.т.н., проф. Васюков В.Н., [email protected] Новосибирский государственный технический университет, Новосибирск, пр. К. Маркса, 20 Факультет Радиотехники и электроники Кафедра теоретических основ радиотехники Основы теории помехоустойчивости передачи дискретных сообщений Система передачи дискретных сообщений a ИС bц (t ) К u (t ) М ЛС a bц (t ) z (t ) ДМ ДК ПС Источник сообщения ИС вырабатывает дискретное сообщение, оно подвергается кодированию, результат кодирования в форме цифрового сигнала bц (t ) поступает в модулятор М (передатчик), вырабатывающий сигнал u (t ) , приспособленный по своим характеристикам для передачи по линии связи ЛС. В линии связи происходит искажение сигнала и его взаимодействие с помехой, на вход демодулятора ДМ (приёмника) поступает наблюдаемое колебание z (t ) . Демодулятор выполняет функцию, обратную модуляции. Вследствие воздействия помех результат демодуляции bц (t ) отличается в общем случае от сигнала bц (t ) поэтому результат декодирования a также не совпадает с сообщением a . 2 В двоичной системе связи с амплитудной телеграфией (АТ) канальный сигнал, соответствующий передаваемому символу «1», представляет собой радиоимпульс, а символу «0» соответствует отсутствие сигнала (пауза). Такой способ модуляции называют амплитудной телеграфией с пассивной паузой (АТПП) . При частотной (фазовой) телеграфии различные символы передаются сигналами одинаковой формы с мгновенной частотой (начальной фазой), меняющейся скачком от посылки к посылке. Для простоты здесь полагается, что система является изохронной, то есть моменты начала и окончания элементарных посылок точно известны. Допустим, что в канале отсутствуют искажения, затухание, межсимвольная интерференция, а помеха аддитивна, тогда наблюдаемое колебание в любой момент представляет собой сумму где z (t ) s (t , bi ) (t ) bi значение цифрового сигнала 3 При амплитудной телеграфии z (t ) k bц (t ) s(t k ) (t ) Задача демодулятора состоит в том, чтобы по наблюдаемому колебанию принять решение bц (t ) о переданном сигнале bц (t ), такое, чтобы обеспечить максимальную верность. Правило (алгоритм) принятия решения – это закон преобразования z (t ) в bц (t ) . Поскольку помеха является случайной, то задача построения оптимального (наилучшего) демодулятора представляет собой статистическую задачу и решается на основе методов теории вероятностей и математической статистики (теории статистических решений). 4 Перед принятием решения с целью повышения его качества (верности) часто наблюдаемое колебание подвергают дополнительной обработке. Если обработка линейная, то ее результат может быть записан в форме 0 0 0 y (t ) z ( ) (t , )d s( , bi ) (t , ) d ( ) (t , ) d (t , ) - ядро линейного оператора (устройства обработки) Видно, что результат обработки представляет собой сумму сигнальной и шумовой составляющих. В простейшем случае (t , ) ( t0 ) 0 0 s( , bi ) (t , )d s( , bi ) ( t0 )d s(t0 , bi ) 5 В простейшем случае (t , ) ( t0 ) s( , bi ) (t , )d s( , bi ) ( t0 )d s(t0 , bi ) 0 0 тогда результат обработки сигнала – просто отсчет в момент t0 (не забываем, что это лишь сигнальная составляющая отсчета) z (t ) t0 а результат обработки наблюдаемого процесса t z ( ) (t , )d s(t0 , bi ) (t0 ) 0 6 Такой способ «обработки» плохо использует посылку: фактически правильность решения зависит не от энергии, а только от одного мгновенного значения сигнала. При этом очень важно, чтобы отсчет был взят точно в тот момент, когда значение сигнала достигает максимума. Улучшить эффективность решения можно путем «накопления» нескольких ( K ) отсчетов, взятых в -е моменты времени i i 1,..., K Для этого ядро должно иметь вид K (t , ) ( ti 0 ) i 1 Учесть различную значимость отсчетов для принятия решения можно, введя весовые коэффициенты при -функциях, тогда K (t , ) hi ( ti 0 ) i 1 7 Увеличивая число отсчетов K , в пределе получаем непрерывное ядро (t , ) h(t , ) оператора обработки – весовую функцию линейного фильтра. Вообще говоря, оптимальная обработка может быть нелинейной. Материалом для принятия решения в демодуляторе служит в рассматриваемом случае реализация колебания на интервале длительности . Если бы помеха отсутствовала, то эта реализация совпадала бы с элементарным сигналом (посылкой), который можно считать точкой в гильбертовом пространстве сигналов, определенных на заданном временном интервале. 8 H1 z s1 z H2 s2 посылки, возможные в данной системе реализации помехи реализации наблюдаемого процесса граница областей выборочного пространства 9 Задача синтеза оптимального демодулятора (приёмника) ставится следующим образом: нужно найти оптимальный алгоритм обработки и оптимальное правило решения, обеспечивающие максимальную вероятность безошибочного (правильного) решения. Максимум этой вероятности В.А. Котельников назвал потенциальной помехоустойчивостью, а приёмник, реализующий этот максимум – идеальным приёмником. H1 H2 С точки зрения приемника каждая область выборочного пространства соответствует определенной гипотезе – предположению о переданном сигнале; в простейшем случае гипотез две 10 Пример 9.1. Предположим, что результатом обработки является значение соответствующее окончанию интервала наблюдения. y Если в колебании присутствует только шум, гауссов с нулевым средним и СКО , то плотность распределения величины y имеет вид w( y | H 0 ) y2 2 1 w0 ( y ) e 2 2 y 11 если кроме шума на вход приемника поступает сигнал, то результат обработки имеет ненулевое (для определенности – положительное) среднее , и плотность распределения величины имеет вид a ( y a )2 1 2 2 w1( y ) e 2 w( y | H 0 ) w( y | H1 ) a y Эти гипотезы являются простыми, но если неизвестно, они становятся сложными 12 Критерии качества статистических решений Рассмотрим систему связи, в которой используются К различных символов. Тогда демодулятор должен различать К различных гипотез. При этом возможны ошибки: может быть принято решение в пользу j-й гипотезы, в то время как справедливой является i-я гипотеза. Такая ситуация описывается условной вероятностью ошибки pij P D j | H i Различные ошибки могут наносить разный вред, поэтому вводится численная характеристика ij , называемая риском, или потерей. Иногда потери объединяют в квадратную К×К-матрицу ij , называемую матрицей потерь 13 Символы, которым соответствуют разные гипотезы, могут иметь разные вероятности появления в сообщении. Поэтому каждая (i-я) гипотеза характеризуется некоторой вероятностью i осуществления, которая называется априорной вероятностью. p Cуммируя, можно ввести усреднённую характеристику (критерий) качества принятия решения, называемую средним риском K K R pi pij ij i 1 j 1 Это – математическое ожидание потерь, связанных с принятием решения. 14 Если априорные вероятности гипотез точно известны, а потери назначены обоснованно, то приёмник, обеспечивающий наименьший средний риск, будет наиболее выгодным. Критерий минимума среднего риска называют также критерием Байеса. Иногда потери, связанные с различными ошибками, принимают равными друг другу ij , ii 0, i 1,..., K То́мас Ба́йес (Thomas Bayes) 1702 — 1761 15 ij , ii 0, i 1,..., K Тогда оптимальный байесовский приёмник обеспечивает минимальную среднюю вероятность ошибки (критерий идеального наблюдателя) K K pош pi pij i 1 j 1 i j и называется идеальным приемником Котельникова Владимир Александрович Котельников (1908 – 2005) 16 Если также принять равными априорные вероятности гипотез pi 1/ K , i 1,..., K , то критерий Байеса сводится к критерию минимума суммарной условной вероятности ошибки K K pош усл pij i 1 j 1 j i Проблема синтеза оптимального демодулятора состоит в нахождении границ областей, разбивающих пространство наблюдений наилучшим образом в соответствии с выбранным критерием качества. 17 Бинарная задача проверки простых гипотез Наиболее просто задача построения оптимального демодулятора (приёмника) решается для случая амплитудной телеграфии с пассивной паузой, что соответствует принятию решения о том, что передавался символ «0» (сигнала нет) или символ «1» (сигнал есть). Таким образом, решается задача обнаружения сигнала в наблюдаемом колебании. t 18 Далее предполагается, что помеха в канале представляет собой гауссовский шум с нулевым средним и известной дисперсией, который взаимодействует с сигналом аддитивно (суммируется). Результатом обработки наблюдаемого колебания является случайная величина y , которая может иметь различное распределение в зависимости от того, есть ли сигнал в наблюдаемом колебании (т.е при разных гипотезах) 19 w( y | H 0 ) w( y | H1 ) a y a зависит от способа обработки (например, если обработка сводится к взятию отсчета в момент, когда несущее колебание достигает максимума, величина a представляет собой его амплитуду). 20 В данной постановке демодулятор (приёмник) может принимать решение, основываясь только на наблюдаемом значении y : очевидно, чем больше наблюдаемое значение, с тем большей уверенностью можно утверждать, что сигнал в принятом колебании есть. Разумный алгоритм принятия решения в таком случае должен сравнить y с некоторым фиксированным значением (порогом) и если п больше порога, принять решение о наличии сигнала, в противном случае – о его отсутствии, что можно кратко записать в следующей символической форме: y y y yп "1" y yп "0" 21 w( y | H 0 ) w( y | H1 ) yп a y yп "0" y y yп "1" 22 Каким бы ни был порог, очевидно, есть некоторая ненулевая вероятность принять решение D1 о наличии сигнала при его фактическом отсутствии. Эта вероятность называется условной вероятностью ошибки первого рода («ложной тревоги») и определяется выражением p01 w( y | H 0 )dy yп а вероятность принять решение D0 об отсутствии сигнала, в то время как на самом деле он есть (условная вероятность ошибки второго рода, или yп пропуска сигнала) p10 w( y | H1)dy 23 w( y | H 0 ) w( y | H1 ) yп p10 y yп w( y | H1)dy p01 w( y | H 0 )dy yп сумма указанных условных вероятностей минимальна, если порог находится, как абсцисса точки пересечения условных плотностей 24 w( y | H 0 ) w( y | H1 ) yп p10 y p01 Очевидно, при таком выборе порога приёмник является оптимальным по критерию минимума суммарной условной вероятности ошибки и принятие решения основывается на сравнении значений ПРВ при наблюдаемом значении y 25 w y | H 0 w y | H1 "1" w y | H 0 w y | H1 "0" Или w y | H1 1 "1"; w y | H0 w y | H1 1 "0" w y | H0 Решение, таким образом, принимается в пользу той гипотезы, которая представляется более правдоподобной при данном значении y w y | H1 ( y ) отношение правдоподобия w y | H0 26 Правило w y | H1 1 "1"; w y | H0 w y | H1 1 "0" w y | H0 называется правилом максимального правдоподобия Критерий идеального наблюдателя предполагает учёт априорных вероятностей гипотез, и оптимальный в смысле этого критерия приёмник обеспечивает минимум средней вероятности ошибки, то есть наименьшую сумму безусловных вероятностей ошибок первого и второго рода. 27 p1w( y | H1 ) p0 w( y | H 0 ) yп y yп p1 w( y | H1)dy p0 w( y | H 0 )dy yп сумма указанных безусловных вероятностей минимальна, если порог находится, как абсцисса точки пересечения графиков 28 Правило принятия решения в приёмнике Котельникова можно записать в форме p1w y | H1 1 "1" p0 w y | H 0 p1w y | H1 1 "0" p0 w y | H 0 Используя понятие отношения правдоподобия, можно записать правило в виде p0 ( y ) "1"; p1 p0 ( y ) "0" p1 отношение правдоподобия сравнивается с пороговым значением, зависящим от априорных вероятностей 29 Наконец, в случае байесовского критерия решение принимается по правилу 10 p1w y | H1 1 "1"; 01 p0 w y | H 0 10 p1w y | H1 1 "0" 01 p0 w y | H 0 Используя понятие отношения правдоподобия, можно записать правило в виде p0 01 ( y ) "1"; p110 p0 01 ( y ) "0" p110 отношение правдоподобия сравнивается с пороговым значением, зависящим от априорных вероятностей и назначенных потерь 30 Итак, во всех случаях оптимальный приёмник (демодулятор, или решающее устройство) «устроен одинаково»: для наблюдаемого значения y , зависящего от принятой реализации z (t ) , вычисляется значение отношения правдоподобия, которое сравнивается с порогом; порог п равен p0 01 p110 для приемника, оптимального в смысле критерия минимума среднего риска, p0 / p1 для идеального приёмника Котельникова и 1 для приёмника максимального правдоподобия. иногда удобнее вычислять не отношение правдоподобия, а его логарифм. В силу монотонности логарифмической функции это не влияет на условные вероятности ошибок, если порог также прологарифмировать. 31 Структура оптимального приемника z (t ) выч-ль ОП 1 пороговое устройство 0 п 32