j - Строительная механика
реклама

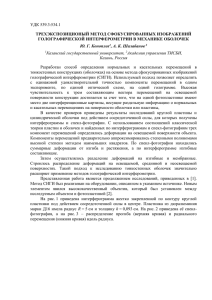
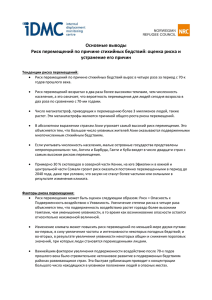
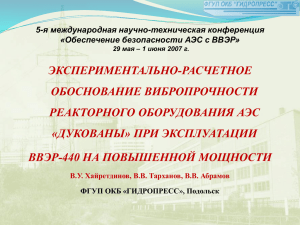
СТРОИТЕЛЬНАЯ МЕХАНИКА Часть ii СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫЕ СИСТЕМЫ Расчёт деформируемых систем методом перемещений 1 РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Метод перемещений – метод расчёта деформируемых систем, в котором за основные неизвестные принимаются характерные перемещения, после определения которых все перемещения и силовые факторы в рассчитываемой системе могут быть найдены стандартными процедурами (поэлементно). РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Fy,t y Mt t Fx,t F Узловые нагрузки q Fy,t+1 j Fx,t +1 t +1 x Mt +1 Узловые нагрузки РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Fy,t y Mt Fx,t t F Узловые нагрузки q F j Fy,t+1 Dt t +1 x Fx,t +1 Mt +1 Узловые нагрузки РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Fy,t y Mt Fx,t t F Узловые нагрузки q F Dt j Fy,t+1 T Смещения связей x t +1 Fx,t +1 Mt +1 Узловые нагрузки РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Mt y Mbj Fx,t t F Узловые нагрузки Dt Смещения связей Вектор перемещений концевых сечений j - го элемента: θ Nbj Q yj bj Fy,t bj ubj vbj qbj F q F j T S с Qbj x N bj M bj bj Вариант представления концевых усилий: M bj Q bj S bj N bj Sj M S ej ej Q ej N ej j Вектор усилий в концевых сечениях (концевых усилий) j - го элемента: M bj Fy,t+1 yj Mt +1 Узловые нагрузки F q j vej uej Q bj xj S bj N bj Q Sj ej Mej q ej S M ej ej N ej Q ej N Для линейно ej деформируемых систем ( Л Д С ): Правила знаков усилий S j S j дляиконцевых перемещений: Fx,t +1 t +1 bj vbj Δ u Δ j Δ bj θ bj ej ej vej q uej ej положительными считаются M , q – по ходу часовой стрелки; M ej Qej ej xj N ej Q , v – сдвиг по часовой стрелке; N , u – по внешней нормали к сечению РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Nbj Q yj bj Mbj vbj bj qbj ubj F Mbj,F+t bj F Dt q q Dt Смещения связей Qbj,F+t Nbj,F+t Воздействия, непосредственно приложенные к элементу – силовые и температурные j j S vej = uej ej Qej M q ej ej Nej Nbj,D Mbj,D bj xj ubj Концевые усилия: Стандартные (табличные) Mej,F+t F+T yj S j ,Δ K j Δ j ej Nej,F+t Qej,F+t Qbj,D vbj + qbj j S j S j ,F t S j ,Δ S j ,F S j ,t S j ,Δ Матрица жёсткости элемента – это матрица, выражающая линейную зависимость его концевых усилий SD от перемещений D концевых сечений. Внеузловые нагрузки j - го элемента Кинематические воздействия – смещения концевых сечений D ( c Δ ) vej Qej,D uej ej xj Mej,D qej Дискретная (матричная) Nej,D запись закона Гука ( S = C*D ) Kj – матрица жёсткости j - го элемента (стандартная) РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Примеры стандартных (табличных) данных метода перемещений EIj , EAj ej bj lj РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Решение – методом начальных параметров или методом сил Примеры стандартных (табличных) данных метода перемещений F Fy M bj,Δ θ bj EIj , EAj k11, j k12, j k16, j vbj Q bj,Δ k 21, j k 22, j k 26, j ubj N bj,Δ ej bj S j ,Δ K j Δ j Fx xl + xr= 1 M ej,Δ θ ej xl lj xr lj k v Q k k ej,Δ l 61, j 62, j 66, j j ej 2 ξ l ξ 2r Fy l j ξ l ξ r Fy l j uej N ej,Δ kif,j = kfi,j hj Mj,F 2 2 (1 2ξ l )ξ 2r Fy 2ξ l ξ r Fy l j ξ r Fx ξ (1 2ξ r )Fy 2 l Nj,F ξ l Fx Dtnr , Dt0 EIj , EAj ej bj α j EI j Δt nr hj α j EA j Δt 0 lj Qj,F lj Mj,t Nj,t M bj,Δ k11, j θbj k12 , j vbj k13 , j ubj k14 , j θej k15 , j vej k16 , j uej ...................................... N ej,Δ k61, j θbj k62 , j vbj k63 , j ubj k64 , j θej k65 , j vej k66 , j uej bj EIj , EAj lj ej РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Решение – методом начальных параметров или методом сил Примеры стандартных (табличных) данных метода перемещений F Fy M bj,Δ θ bj k11, j k12, j k16, j vbj EIj , EAj Qbj,Δ k N bj,Δ k 22, j k 26, j ubj ej bj 21, j S j ,Δ M K j Δ j Fx θ xl + xr= 1 ej,Δ xl lj xr lj vej Q ej,Δ lj k61, j k62, j k66, j ej 2 ξ l ξ 2r Fy l j ξ l ξ r Fy l j N ej,Δ uej kif,j = kfi,j hj Mj,F 2 2 (1 2ξ l )ξ 2r Fy 2ξ l ξ r Fy l j ξ r Fx ξ (1 2ξ r )Fy 2 l α j EA j Δt 0 lj qbj = 1 EIj , EAj ej bj α j EI j Δt nr hj j Nj,F ξ l Fx Dtnr , Dt0 Qj,F M bj,Δ k11, j θbj k12 , j vbj k13 , j ubj k14 , j θej k15 , j vej k16 , j uej ...................................... N ej,Δ k61, j θbj k62 , j vbj k63 , j ubj k64 , j θej k65 , j vej k66 , j uej 2 EI j /l j b EI , EA ej lj j lj 4 EI j /l j bj vbj = 1 Mj,t j bj Nj,t ubj = 1 ej EAj ej 6 EI j /l 2j EA j /l j k11, j 4 EI j /l j k 21, j k51, j 6 EI j /l 2j k31, j k61, j 0 k41, j 2 EI j /l j k12 , j k42 , j 6 EI j /l 2j k22 , j k52 , j 12 EI j /l 3j 6 EI j /l 2j k32 , j k62 , j 0 k13 , j k23 , j k43 , j k53 , j 0 k 33 , j k63 , j EAj /l j РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Структура матрицы жёсткости элемента k11, j k 21, j k K j 31, j k41, j k51, j k61, j k12, j k 22, j k 32, j k42, j k52, j k62, j k13, j k 23, j k 33, j k43, j k53, j k63, j k14, j k 24, j k 34, j k44, j k54, j k64, j k15, j k 25, j k 35, j k45, j k55, j k65, j k16, j k 26, j k 36, j k46, j k56, j k66, j От qbj = 1 От vbj = 1 От ubj = 1 От qej = 1 От vej = 1 От uej = 1 при растяжении (сжатии) и изгибе в одной плоскости 4 EI j /l j 6 EI /l 2 j j 0 2 EI j /l j 6 EI j /l 2j 0 6 EI j /l 2j 0 2 EI j /l j 12 EI j /l 3j 0 6 EI j /l 2j 0 EAj /l j 0 6 EI j /l 2j 0 4 EI j /l j 12 EI j /l 3j 0 6 EI j /l 2j 0 EAj /l j 0 M bj,... Q bj,... N bj,... M ej,... = Q ej,... N ej,... 6 EI j /l 2j 0 12 EI j /l 3j 0 0 EAj /l j 6 EI j /l 2j 0 12 EI j /l 3j 0 0 EAj /l j РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Векторы концевых усилий и перемещений и матрица жёсткости прямолинейного пространственно деформируемого стержня постоянного сечения Sj = [ Mz, bj My, bj Mt, bj Qz, bj Qy, bj Nbj Mz, ej My, ej Mt, ej Qz, ej Qy, ej Nej ]т Dj = [ qz, bj qy, bj qt, bj vz, bj vy, bj ubj qz, ej qy, ej qt, ej vz, ej vy, ej uej ]т 4 iz 0 6i z l 1 0 M z,bj,... 0 0 2 iz 0 6 i z l 1 0 0 0 0 0 M y, bj,... 0 6i y l 1 0 2iy 0 0 0 6 i y l 1 0 4iy M 1 1 0 0 0 l GI 0 0 0 0 0 l GI 0 0 t t t,bj,... 2 1 2 1 0 Qz,bj,... 0 0 12 i y l 0 6 i yl 0 0 0 12 i y l 0 6 i y l 6 i z l 1 0 0 12 i z l 2 0 Q y, bj,... 0 0 12 i z l 2 0 6 i z l 1 0 0 0 1 N 1 EAl 0 0 0 0 0 EAl 0 0 0 0 K j bj,... 1 1 0 M z,ej,... 0 6 iz l 0 0 4 iz 0 0 6 iz l 0 0 2 iz 0 M y, ej,... 0 6 i y l 1 0 4iy 0 0 0 6 i y l 1 0 2iy 0 0 0 M t,ej,... 0 0 GI t l 1 0 0 0 0 0 GI t l 1 0 0 6 i l 1 0 12 i l 2 0 Qz,bj,... 0 0 6 i y l 1 0 12 i y l 2 0 0 y y 2 1 2 1 0 l i 12 0 0 0 l i 6 0 l i 12 0 0 0 l i 6 z z z Q y, bj,... z 0 0 EAl 1 N ej,... 0 0 0 0 EAl 1 0 0 0 0 iz = EIz,j / lj – погонные изгибные жёсткости стержня в главных плоскостях инерции iy = EIy,j / lj РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Определение внутренних усилий и перемещений в произвольном сечении элемента Nbj Q yj bj Mbj bj ubj vbj qbj F q j vej uej ej Qej M q ej ej Nej xj РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Определение внутренних усилий и перемещений в произвольном сечении элемента Nbj Q yj bj Mbj bj ubj vbj qbj F q j vej uej ej Qej M q ej ej Nej xj РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Определение внутренних усилий и перемещений в произвольном сечении элемента Nbj Q yj bj Mbj bj ubj vbj qbj F q j Усилия в сечении M(xj) N(xj) Q(xj) q (xj) M ( x j ) S ( x j ) Q( x j ) – из условий равновесия отсечённой части элемента N ( x j ) xj Перемещения сечения q( x j ) D ( x j ) v( x j ) – методом начальных параметров или др. u( x j ) Последовательность процедур: S(xj) D(xj) Sj = Sj,F + Sj,t + Kj * Dj Dj – стандартные ? РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений Определение внутренних усилий и перемещений в произвольном сечении элемента Перемещения узлов Fy,t Nbj Q yj y bj Mt θ t θ t 1 Mbj v bj bj Fx,t Z t vt Z t 1 vt 1 t u vt u qt t F q t 1 F bj ubj q ut q u j Усилия в сечении bj M(xj) N(xj) Q(xj) S q (xj) M ( x j ) S ( x j ) Q( x j ) – из условий равновесия отсечённой части элемента N ( x j ) Перемещения сечения ? SSj == SSj,F ++ SSj,t ++ KKj **DDj j j,F j,t j j Dj – стандартные Fy,t+1 vt+1 (<0) t +1 Fx,t +1 Mt +1 q( x j ) D ( x j ) v( x j ) – методом начальных параметров или др. u( x j ) S(xj) D j D(xj) j xj 0 Последовательность процедур: qt+1 t+1 ? x Связь между перемещениями узлов и концевых сечений элемента qbj = qt ; vbj = vt * cos bj + ut* sin bj ubj = vt * sin bj – ut* cos bj 1 0 0 S(xj) D(xj) Dbj = abj * Zt abj 0 cos β j sin β j 0 sin β j cos β j Вывод: ?=Z стандартная матрица РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Идея метода перемещений За основные неизвестные в методе перемещений принимаются независимые компоненты линейных и угловых перемещений расчётных узлов системы. Расчётными узлами являются: 1) места соединения двух и более элементов или точки перелома оси ломаного стержня: 2) точки изменения жёсткости сечения стержня: EI1 EI2 u 3) опорные узлы с неизвестными компонентами перемещений: q 4) дополнительно – любые точки системы: C S 1 const C S 2 const v q РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Деформируемая система, у расчётных узлов которой есть неизвестные угловые и/или линейные перемещения, не находящиеся из условий совместности деформаций ( перемещений ) и кинематических граничных условий, называется кинематически неопределимой системой. u2 u1 2 v1 1 v2 2 lj q2 u2 = u1 u1 При l *j l j 1 q2 l *j Система, у которой все угловые и линейные перемещения расчётных узлов известны ( заданы либо равны нулю ) или могут быть найдены из условий совместности деформаций ( перемещений ) и кинематических граничных условий, называется кинематически определимой системой. v1 = D(1) EI p q1 = D(1) / l 1 l D(3) D(1) D(2) заданы Все перемещения узлов известны ( v1 и q 1 находятся из условий совместности перемещений ) РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Степень кинематической неопределимости ( nk ) – суммарное число независимых углов поворота и линейных перемещений расчётных узлов системы. nk = n q + nD u1 u2 степень линейной подвижности расчётных узлов степень угловой подвижности v2 v1 1 q1 q2 2 u4 u3 4 v3 3 q3 q4 v4 nq = 4 nD = 8 nk = 12 l *j l j дает: v1 = v2 = v3 = v4 = 0 nq = 4 u1 = u2 ; u3 = u4 nD = 2 Применение гипотезы nk = 6 В nж.у. учитываются неопорные узлы с припайками, а также узлы ( в т.ч. опорные ) с упругоподатливыми угловым связями. nж.у. – для плоской системы nθ 3nж.у.– для пространственной системы ( ж.у. – жёсткие узлы ) nж.у. = 4 nж.у. = 2 Для определения nD – шарнирная система Шарнирная система получается из заданной системы путём введения цилиндрических шарниров ( в пространственной системе – шаровых шарниров ) во все жёсткие узлы, включая опорные защемления, и продольных поступательных шарниров в стержни, для которых требуется учитывать удлинения ( укорочения ) при их растяжении ( сжатии ), а также удалением всех упругих связей ( линейных и угловых ). nD = nд.c. ( = Wш.с. , если Ш.С. – без лишних связей ) ( д.с. – дополнительные связи ) РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Степень кинематической неопределимости ( nk ) – суммарное число независимых углов поворота и линейных перемещений расчётных узлов системы. nk = n q + nD u1 u2 степень линейной подвижности расчётных узлов степень угловой подвижности v2 v1 1 q1 q2 2 u4 u3 4 v3 q3 3 q4 v4 nq = 4 nD = 8 nk = 12 l *j l j дает: v1 = v2 = v3 = v4 = 0 nq = 4 u1 = u2 ; u3 = u4 nD = 2 Применение гипотезы nk = 6 В nж.у. учитываются неопорные узлы с припайками, а также узлы ( в т.ч. опорные ) с упругоподатливыми угловым связями. nж.у. – для плоской системы nθ 3nж.у.– для пространственной системы nд.с. = 2 При l *j l j Для определения nD – шарнирная система Шарнирная система получается из заданной системы путём введения цилиндрических шарниров ( в пространственной системе – шаровых шарниров ) во все жёсткие узлы, включая опорные защемления, и продольных поступательных шарниров в стержни, для которых требуется учитывать удлинения ( укорочения ) при их растяжении ( сжатии ), а также удалением всех упругих связей ( линейных и угловых ). nD = nд.c. ( = Wш.с. , если Ш.С. – без лишних связей ) nD = 2 ( д.с. – дополнительные связи ) РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Степень кинематической неопределимости ( nk ) – суммарное число независимых углов поворота и линейных перемещений расчётных узлов системы. nk = n q + nD u1 u2 степень линейной подвижности расчётных узлов степень угловой подвижности v2 v1 q2 1 2 u4 u3 4 v3 q1 q3 3 С учётом продольных деформаций стержней = = = = nk = 12 l *j l j дает: v1 = v2 = v3 = v4 = 0 nq = 4 u1 = u2 ; u3 = u4 nD = 2 Применение гипотезы Для определения nд.с. = 8 = = q4 v4 nq = 4 nD = 8 nk = 6 nD – шарнирная система Шарнирная система получается из заданной системы путём введения цилиндрических шарниров ( в пространственной системе – шаровых шарниров ) во все жёсткие узлы, включая опорные защемления, и продольных поступательных шарниров в стержни, для которых требуется учитывать удлинения ( укорочения ) при их растяжении ( сжатии ), а также удалением всех упругих связей ( линейных и угловых ). nD = nд.c. ( = Wш.с. , если Ш.С. – без лишних связей ) nD = 8 ( д.с. – дополнительные связи ) РАСЧЁТ ДЕФОРМИРУЕМЫХ СИСТЕМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ Основная система метода перемещений – это, как правило, кинематически определимая система, получаемая из заданной деформируемой системы путём введения в расчётные узлы минимально необходимых угловых и линейных связей по направлениям перемещений, принимаемых за основные неизвестные. ОСМП = РДC + ДСРУ + Z Угловая связь Шарнирная система Линейная связь EA nс = 5 nD = 5 nk = 11 EA nж.у. = 6 Z1 Z2 ОСМП Z3 Z4 Z11 Z9 Z7 EA Z8 Z5 Z6 Z10 Контрольные вопросы ( в скобках даны номера слайдов, в которых можно найти ответы на вопросы; для перехода к слайду с ответом можно сделать щелчок мышью по номеру в скобках*); для возврата к контрольным вопросам сделать щелчок правой кнопкой мыши и выбрать «Перейти к слайду 23» ) 1. Какой метод расчёта деформируемых систем называется методом перемещений? ( 2 ) 2. Что принимается за основные неизвестные в методе перемещений? ( 17 ) Как они обозначаются? ( 22 ) 3. Признаки расчетных узлов системы. ( 17 ) 4. Что такое кинематически неопределимая система (КНС)? ( 18 ) 5. Какая система называется кинематически определимой? ( 18 ) 6. Что такое степень кинематической неопределимости (nк)? ( 19 ) 7. Из чего складывается nк? ( 19 ) 8. По каким формулам можно вычислять nк для плоских стержневых систем? Для пространственных систем? Чему равны nq и nD? ( 19 ) 9. Что такое шарнирная система, как она получается и для чего используется? ( 19 ) 10. Как при формировании шарнирной системы учитываются элементы, удлинениями которых при растяжении (сжатии) нельзя пренебрегать? ( 19 ) 11. Какую рабочую гипотезу вводят в МП для стержней, работающих преимущественно на изгиб, и каково следствие применения этой гипотезы (влияние на количество основных неизвестных)? ( 18 ) , ( 20 – 21 ) 12. Идея метода перемещений. ( 15 – 16 ) Как вычисляются усилия в концевых сечениях стержней через их смещения и воздействия, приложенные к данному стержню? ( 7 ) 13. Что такое матрица жёсткости стержня? ( 7 ) , ( 11 – 12 ) 14. Что такое основная система метода перемещений (ОСМП)? ( 22 ) *) Только в режиме «Показ слайдов».