Лекция № 6 Тема: Численное моделирование . Колебания 1
реклама

Сегодня: _________________ 2009 г.
Лекция № 6
Тема: Численное моделирование
Содержание лекции:
1. Колебания
а) линейный гармонический осциллятор
б) математический маятник
в) затухающие колебания
Гармонический осциллятор
Движение, которое повторяется через конечный интервал
времени, например движение Земли вокруг Солнца,
называют периодическим, или гармоническим.
В том случае, когда объект движется по одной траектории
между
двумя
предельными
положениями,
движение
называют колебанием.
Рис.1.
Рассмотрим тело массой m,
прикрепленное к свободному
концу пружины. Тело скользит
по горизонтальной поверхности
без трения
(рис.1).
Будем
описывать
положение
тела
координатой
х
и примем
точку х = 0
в
качестве
положения равновесия,
т.е.
положения, в котором пружина не
напряжена. Если тело сместить
из положения равновесия х = 0 и
затем отпустить, то оно будет
колебаться в горизонтальном
направлении.
Гармонический осциллятор
Известно, что если пружина не слишком сильно растянута или сжата,
то сила, действующая на тело с координатой х,
является
линейной относительно х.
F = - kx
(1)
Гармонический осциллятор
Силовая постоянная k является мерой жесткости пружины. Знак
минус в (1) указывает на то, что сила стремится вернуть тело в
положение равновесия. Уравнение движения этого тела можно
записать в виде
d 2x
2
(2)
dt
2
w0 x
где величина w0 определяется выражением
k
w
m
2
0
(3)
Уравнение (2) - пример линейного дифференциального уравнения,
поскольку в него входят только первые степени переменной х и ее
производных. Движение, описываемое уравнением (2), называется
простым гармоническим колебанием, и его решение можно выразить
аналитически через синусы н косинусы.
Гармонический осциллятор
Поскольку вид данного решения поможет нам ввести некоторые
понятия, необходимые для изучения колебаний, приведем здесь
решение этого уравнения. Одна из формул решения имеет вид
(4)
x(t ) A cos(w0t )
где А и — постоянные, а аргумент косинуса выражается в
радианах. Прямой подстановкой (4) в (2) убеждаемся в том, что
выражение (4) является решением. Постоянные А и называются
амплитудой и начальной фазой н могут быть определены из
начальных условий для координаты х и скорости v = dx/dt.
Гармонический осциллятор
Поскольку косинус является периодической функцией с периодом
2, понятно, что функция x(t) в выражении (4) также периодическая.
Определим период Т как наименьшее время, через которое движение
повторяется, т.е.
x(t + T) = x(t).
(5)
Поскольку w0Т соответствует одному периоду, получим
2
2
T
w0
k /m
(6)
Частота колебаний v представляет собой число периодов в
секунду и определяется выражением v = 1/Т. Заметим, что Т зависит
от отношения k/m и не зависит от А и . Следовательно, период
простых гармонических колебаний не зависит от их амплитуды.
Гармонический осциллятор
Хотя координата и скорость осциллятора непрерывно
изменяются, полная энергия Е остается постоянной и равна
1 2 1 2
E mv kx
2
2
(7)
Использование метода Э-К
Print["\t","время","\t","\t","координата","\t","\t","скорость"];
vt[1,2]=ncalc*dt; (*начальное время*)
(*проводим вычисления*)
For[j=0,j< 10,{
vt[j,1]=0.0; (*скорость*)
pos[j]=poss[[j]];
(*берём значения позиции из массива poss[]*)
vt[j,2]=dt*j+vt[1,2]; (*увеличиваем значние времени*)
For[i=1,i£ncalc,
{
accel=-w2*pos[j];
vt[j,1]+=accel*dt ; (*скорость*)
pos[j]+=vt[j,1]*dt; (*координата*)
}; i++]
Результат
Расчет энергии
Trace[en[j]=(0.5*mass*((vt[j,1])
^2))+(0.5*k*((pos[j])^2))];
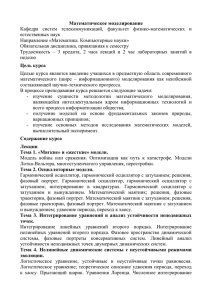
Математический маятник
Другим общеизвестным примером колебательной механической
системы является «математический» маятник (рис.). Это идеализированная
система, состоящая из частицы или «груза» массой m, прикрепленной к
нижнему концу жесткого стержня длиной L с пренебрежимо малой массой,
верхний конец которого вращается без трения в точке подвеса. Если груз
вывести из положения равновесия и отпустить, то маятник будет совершать
колебания в вертикальной плоскости.
Рис. 2. Силы, действующие на
математический маятник. Угол
измеряется относительно вертикальной
оси. Он положителен, когда груз находится
справа, и отрицателен, когда груз
находится слева.
Математический маятник
Возникновение колебаний небольшого тела, подвешенного на
нерастяжимой нити, под действием силы тяжести
Математический маятник
Поскольку движение груза происходит по дуге окружности
радиуса L с центром в точке О, то положение груза характеризуется
длиной дуги или углом (рис. 2). Линейная скорость и ускорение
груза при движении по дуге равны
d
L
dt
d 2
aL 2
dt
(8)
(9)
В отсутствие трения на тело действуют две силы: сила тяжести
mg, направленная вертикально вниз, и сила со стороны стержня.
Последняя направлена из центра, если
|| < /2.
Поскольку стержень жесткий, то необходимо учесть только
компоненту силы mg, направленную по касательной к дуге. Из рис. 2
можно понять, что эта компонента равна mgsin и направлена в
сторону уменьшения угла . Тогда уравнение движения запишется в
виде
d
mL 2 mg sin
dt
2
(10)
или
d
g
sin
2
L
dt
2
(11)
Математический маятник
Однако если амплитуда колебаний маятника достаточно мала, то sin
и (11) можно переписать в виде
(12)
d 2
g
для <1.
dt 2
L
Если сопоставить переменные х и , то видно, что эти два уравнения
имеют одинаковый вид, и можно сразу сделать вывод, что для << 1 период
математического маятника равен
(13)
T 2 L / g
Потенциальную
энергию
можно
найти,
используя
следующие
соображения. Если стержень отклонить на угол , то груз поднимется на
высоту h = L- Lcos (см. рис. 2). Тогда потенциальную энергию груза в
поле тяготения Земли можно записать в виде
U = mgh = mgL(1-cos),
(14)
где нуль потенциальной энергии соответствует = 0. Поскольку
кинетическая энергии маятника равна
,
то полная энергия Е равна
1 2 1 2
m mL (d / dt )2
2
2
1 2
E mL (d / dt )2 mgL2 (1 cos )
2
(15)
Пример
Print["Математический маятник"];
l=Input["Введите длину нити маятника"];
Tm=2*Pi*Sqrt[l/9.8];
Print["Период мат. маятника: ", Tm];
Затухающие колебания
Из опыта известно, что в природе большинство колебаний
постепенно уменьшается до тех пор, пока смешение не становится
нулевым; такие колебания называются затухающими.
Для движения с малыми скоростями в качестве приближения
разумно принять, что тормозящая сила пропорциональна первой
степени скорости. В этом случае уравнение движения можно
записать в виде
(16)
d 2x
dx
2
w x
2
dt
затухания
представляет
dt
где коэффициент
меру тормозящей
силы. Заметим, что тормозящая сила в уравнении (16) направлена в
сторону, противоположную движению. Как ведет себя х(t), если
пренебречь линейным возвращающим членом в уравнении (16).
Пример
Print["Затухающие колебания"];
n=Input["Введите начальную амплитуду"];
phi=Input["Введите коэффициент затухания волны"];
Plot[n*Exp[-phi*x]*Cos[x],{x,0,80},PlotRange® {-n,n}];
Вынужденные колебания
При воздействии на линейный гармонический осциллятор внешней
переменной силы F(t) система будет совершать движение, которое в отличие
от рассмотренных называется вынужденными колебаниями.
Рассмотрим линейный осциллятор с затуханием, совершающий
вынужденные колебания под действием вынуждающей силы F(t)
дополнительно к линейным возвращающей и тормозящей силам. В этом
случае уравнение движения можно записать в виде
d 2x
dx F (t )
2
w
x
2
dt
m
dt
(17)
«Отклик» системы принято рассматривать как функцию от смещения
х, а не скорости v.
Функция F(t), входящая в уравнение (17), зависит от времени
произвольным
образом.
Поскольку
многие
силы
являются
гармоническими, рассмотрим сначала силу вида
(18)
F (t )
A0 cos wt
m
где w - угловая частота вынуждающей силы.
Пример
force=Input["Введите внешнюю силу, действующую на
осциллятор"];
Plot[n*Exp[-phi*x]*Cos[x]-force/mass,{x,-100,100}];
v0
f
1;
Input "Частота внешнего напряжения
Array a1,
50, 2
;
Array a2, 50, 2
;
w
2 Pi f;
r
Input "Сопротивление
c
Input "Ёмкость" ;
dt
Частота от 2 до 30
Сопротивление от 1 до 10
Емкость от 2 до 30
Input "Шаг по времени" ;
tau
t
Ом " ;
Гц " ;
r c;
1 f;
If t
tau, tmax
tmin
0;
vmin
q
0;
k
0;
For i
2 t, tmax
v0;
t, i
tmax,
l
v0 Cos w t
q
l dt;
k
r
q tau;
;
a1 k, 1
i;
a1 k, 2
v0 Cos w i ;
a2 k, 1
i;
a2 k, 2
l r;
;i
2 tau ;
dt ;
Print "\nЗависимость частоты от времени" ;
ListPlot Table
a1 m, 1 , a1 m, 2
, m, 1, i
Print "\nЗависимость падения напряжения от
ListPlot Table
Null
a2 m, 1 , a2 m, 2
, m, 1, i
, PlotJoined
True ;
времени" ;
, PlotJoined
True ;
Гармонический осциллятор
Содержательная постановка
Тело, лежащее на гладкой горизонтальной плоскости, прикреплено к
неподвижной стене пружиной. Исследовать колебательные
движения тела. Масса тела и жесткость пружины известны.
Рис.3.
Гармонический осциллятор
Концептуальная постановка
Примем следующие предположения:
1.
Объектом исследования является поступательно движущееся тело
массой m, принимаемое за материальную точку.
2.
Движение тела подчиняется второму закону Ньютона.
3.
Тело находится под действием трех сил (рис. 5): силы тяжести mg,
реакции поверхности N и силы упругости Fe пружины. Так как
поверхность гладкая, то силой трения пренебрегаем.
4.
Тело совершает прямолинейные колебательные движения, так как
сила тяжести mg уравновешивается силой реакцией поверхности N.
5.
В уравновешенном состоянии центр масс тела находится в положении
с координатами (хp, уp).
6.
При малом растяжении пружины величину возникающей в ней силы
упругости можно представить линейной зависимостью (закон Гука) F =
сΔх, где Δх = х - хр - растяжение пружины (отклонение тела от
положения равновесия х), с – жесткость пружины. Направлена сила в
сторону положения равновесия.
Гармонический осциллятор
Принимая, что в некоторый момент пружину растянули на величину х 0 и
сообщили телу скорость v0, требуется определить координату и
скорость тела как функции времени.
Математическая постановка
С математической точки зрения имеем задачу Коши с начальными
условиями:
mdv/dt = Fe = -c(x - хр); dx/dt = v
при начальных условиях
х(0) = х0; v(0) = v0.
Требуется найти решение данной задачи.
(19)
(20)
Гармонический осциллятор
Решение задачи
Введем обозначение для производных по времени:
d dx dv
x
v
dt dt dt
Тогда, принимая хр = 0, обыкновенное дифференциальное уравнение (3.25)
можно переписать в виде:
x k 2 x 0
(21)
где k2 = с/т — квадрат частоты свободных колебаний тела около положения
равновесия. Период свободных колебаний выражается через циклическую
частоту Т = 2/k.
Уравнение (21) называется дифференциальным уравнением свободных колебаний
материальной точки. Точка совершает гармонические колебания.
Гармонический осциллятор
Решение данного однородного линейного уравнения с постоянными
коэффициентами
можно
представить
в
виде:
x a sin( kt b),
(22)
где а — амплитуда свободных колебаний, b — начальная фаза
колебаний, определяемые из начальных условий.
x0 a sin b,
v0 x ak cos b.
Из этих выражений найдем а и b:
a x v0 k ,
2
0
2
x0
tg b k .
v0
(23)
Гармонический осциллятор
Решение рассматриваемой задачи можно получить численно,
заменяя производные их приближенными разностными аналогами и
переходя к системе разностных уравнений:
v(t t ) v(t ) k 2 x(t )t ,
x(t t ) x(t ) v(t )t
Анализ результатов
Принимая при выполнении расчетов m = 1 кг, с = 2500 Н/м,
х0 = 0 м, v0 = 1м/с, получаем:
k = 50 с-1; T = 0,04; а = 1/ k = 0,02; b = 0;
x(t ) 0,02 sin( 50t );
v(t ) cos(50t ).
(24)
Гармонический осциллятор
На рис. 4 приведены численные результаты определения
положения материальной точки при разных шагах
интегрирования Δt. Видно, что с уменьшением величины Δt
значения, полученные при численных расчетах, стремятся к
точному решению.
Рис.4. Влияние величины шара по времени на точность решения.
Гармонический осциллятор
Изложенный численный способ решения задач позволяет
включить в уравнение движения нелинейную зависимость силы
упругости пружины от величины растяжения. На рис. 8
представлены результаты численного решения рассмотренной
задачи для нелинейных зависимостей силы от растяжения,
приводящих к следующим системам разностных уравнений:
v(t t ) v(t ) k 2 x(t )3 t ,
x(t t ) x(t ) v(t )t
(25)
при Fe = cх2 (знак модуля использован для учета направления
действия силы в зависимости от положения тела) и
v(t t ) v(t ) k 2 x(t ) x(t ) t ,
x(t t ) x(t ) v(t )t
при Fe = cх3. Жесткость пружины принималась равной
c = 2500 Н/м3.
(26)
Гармонический осциллятор
Результаты, приведенные на рис. 5, свидетельствуют о
незатухающих гармонических колебаниях тела во всех рассмотренных
случаях. При этом с увеличением показателя степени при величине
растяжения пружины происходит увеличение амплитуды и уменьшение
частоты колебаний.
Рис.5. Влияние вида зависимости силы от растяжения пружины на
колебания тела
Гармонический осциллятор
Определенный интерес представляет анализ зависимости между
положением тела и его скоростью, называемой фазовой траекторией. Для этого
используют графическое представление процесса в системе координат
«положение точки - скорость точки». Для этого представим точное решение в
виде:
k 2 x 2 (t ) sin 2 (kt), v 2 (t ) cos 2 (kt).
Исключение времени с помощью тригонометрических формул (сложение
полученных соотношений) приводит к уравнению эллипса в системе координат х
— v.
На рис. 6 показаны найденные численно
фазовые траектории для трех
рассмотренных выше задач, имеющих
разные зависимости сил упругости от
удлинения пружин.
Рис.6. Фазовые траектории точки при
различных законах упругости
(1 - Fe = cx; 2 - Fe = cx2; 3 - Fe = cx3)
Гармонический осциллятор
Усложним задачу введением дополнительной силы
сопротивления движению. Такая ситуация возможна, если тело
погружено в жидкость (рис. 7, а) или если в рассматриваемую схему
добавлен масляный демпфер, гасящий колебания (рис.7, б). В
последнем случае вязкое масло при перетекании внутри цилиндра
создает дополнительное сопротивление движению.
Наличие сил вязкого трения приводит к необходимости
добавления новой гипотезы при концептуальной постановке задачи.
Подобную гипотезу можно сформулировать следующим образом:
Сила вязкого трения прямо пропорциональна скорости тела и
направлена против направления его движения: Fc = - v
( — коэффициент сопротивления, величина постоянная).
Гармонический осциллятор
Рис. 7. Схемы конструкций с вязкими средами: жидкостью (а); масляным
демпфером (б)
С учетом данной гипотезы соотношения (19) в математической
постановке следует заменить уравнениями следующего вида:
dv / dt k 2 ( x x p ) 2nv; dx/dt v,
где k2 = c/m; 2n = /m
(27)
Гармонический осциллятор
Систему разностных уравнений в этом случае можно представить
следующим образом:
v(t t ) v(t ) [k x(t ) 2nv(t )t ,
x(t t ) x(t ) v(t )t.
2
(28)
Гармонический осциллятор
На рис. 8 показаны изменения координаты и скорости тела, полученные
для условий т = 1 кг, с = 2500 Н/м, х0 = 0 м, v0 = = 1 м/с,
= 10
Нс/м (большое значение коэффициента сопротивления выбрано для
наглядности результатов), шаг интегрирования t = 10-5 с.
Рис. 8. Координата (а) и скорость (б) центра масс тела в вязкой среде
Гармонический осциллятор
На рис.9 представлена фазовая траектория для тела, совершающего
колебания в вязкой среде. В отличие от предыдущей задачи, наличие
сопротивления (диссипации механической энергии) приводит к тому, что
фазовая траектория оказывается спиралью с уменьшающимся радиусом,
стремящимся к нулю. Это соответствует полной остановке механической
системы.
Рис.9. Фазовая траектория движения точки в вязкой среде.
Гармонический осциллятор
Вынуждающие колебания
Рассмотрим ситуацию, когда к телу (рис.7) приложена
горизонтальная гармоническая сила, величина которой
изменяется по закону F(t) = В sin(qt) с амплитудой В и циклической
частотой q. Система уравнений (27) преобразуется в этом случае к
виду:
dv
B
dx
2
k ( x x p ) 2nv sin( qt ),
v.
dt
m
dt
(29)
Система разностных уравнений может быть представлена
следующим образом:
B
2
v(t t ) v(t ) k x(t ) 2nv(t ) sin( qt ) t ,
m
x(t t ) x(t ) v(t )t.
(30)
Гармонический осциллятор
На рис. 10 представлена координата тела при вынужденных колебаниях
как функция времени. При выполнении вычислений принято: m = 1 кг, С =
2500 Н/м, = 0 (без учета вязкости),
х0 = = 0 м, vx0 = 1 м/с, В = 10 Н, q = 40, 45, 47,5, 50 и 55 с-1.
Рис. 10. Координата тела как функции времени при вынужденных колебаниях с
частотами q = 40 с-1 (a), q = 45 с-1 (б), q = 47,5 с-1 (в) и q = 50 с-1 (г)
Гармонический осциллятор
Рис. 11. Фазовые траектории при вынужденных колебаниях тела с
частотой q = 40 с-1 (a), q = 47,5 с-1 (б), q = 50 с-1 (в) и q= 55 с-1 (г)
Гармонический осциллятор
Рис. 12. Координата (а) и скорость (б) как функция времени, фазовая
траектория (в) движения тела при вынужденных колебаниях в вязкой среде
Гармонические колебания
Гармонические колебания
Маятник Фуко
Маятник Фуко
Физический маятник
Абсолютно твердое тело, совершающее
колебания под действием силы тяжести
вокруг неподвижной горизонтальной оси,
не проходящей через центр тяжести
Маятник Фруда
Циклоидальный маятник
Колебания в кристаллах
Колебания в кристаллах
Кристалл представляет собой совокупность
атомов, связанных упругими силами.
В зависимости от расположения атомов
кристаллическая решетка может быть простой,
гранецентрированной, объемноцентрированной и
т.д.
При малых амплитудах смещения атомов из
их положения равновесия справедливо
гармоническое приближение описания колебаний.
Под действием теплового возбуждения
атомы в кристалле находятся в непрерывном
движении.
Колебания в кристаллах
Рассмотрим колебания атомов в одномерном
кристалле. Представим такой кристалл в виде цепочки
шариков с массами m1 и m2, соединенных пружинами с
жесткостью c. Сила, действующая на каждый шарик, зависит
от относительного смещения двух других шариков, лежащих
справа и слева от рассматриваемого. Поэтому, смещение
каждого шарика un и um (см. рисунок) задается следующей
системой уравнений:
m1(d2un/dt2) = -c(2un - um-1 - um)
m2(d2um/dt2) = -c2um - un - un+1)
Колебания в кристаллах
Эти уравнения описывают колебательное движение
атомов в одномерном кристалле:
un = A1exp[ i(kan - wt) ]
um= A2exp[ i(kam - wt) ]
где a/2 - расстояние между ближайшими атомами, k=2/l волновое число, l - длина волны в кристалле. Уравнения,
приведенные выше, имеют два решения относительно w:
w12 = w02/2) [ 1 - (1-2sin2(ak/2))1/2 ]
w22= w02/2) [ 1 + (1-2sin2(ak/2))1/2 ]
где 2 = 4m1m2/(m1+m2)2; w02 = 2c (m1+m2)/m1m2. Эти уравнения
определяют две ветви дисперсионной кривой (так
называемая акустическая ветвь и оптическая ветвь).
Лекция окончена
Нажмите клавишу <ESC> для выхода