Основы теории управления Формы записи линеаризованных уравнений
реклама

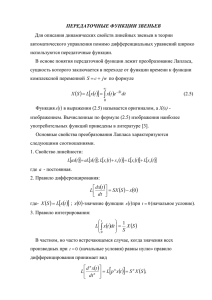
Основы теории управления Формы записи линеаризованных уравнений В общем виде линеаризованное дифференциальное уравнение, описывающее элемент, можно записать следующим образом d n y(t) d n- 1y(t) dy(t) a a ... a a y(t) = 0 1 n- 1 dt n dt n dt n- 1 d m x(t) d k f(t) =b ... b x(t) + c ... + c f(t) , 0 m 0 k dt m dt k где y(t), x(t), f(t) - выходная и входная величины элемента и внешнее воздействие; ai, bi, ci - постоянные коэффициенты; n - порядок уравнения, ( nm,k ) (1.5) Введем алгебраизированный символ дифференцирования d p= dt Заменим в (1.5) дифференциал на р, а y(t) вынесем за скобку (a0pn + a1pn -1 +…+an-1p+an) y(t) = = (b0pm +b1pm-1 +…+bm) x(t) + (c0pk +c1pk-1 +…+ck) f(t) (1.6) В общем случае в соответствии с (1.6) уравнение элемента можно представить в форме D(p) y(t) = N(p) x(t) + M(p) f(t) n D(p) = a pn - i i0 i m N(p) = b pm - i i0 i (1.7) k M(p) = c pk - i i0 i полиномы степени n, m, k от символа дифференцирования p Первая стандартная форма записи слева Дифференциальное уравнение имеет вид выходная величина и ее производные = справа входные величины и все остальные члены выходная величина y(t) должна иметь коэффициент равный единице (a0pn + a1pn -1 +…+an-1p+an) y(t) = = (b0pm +b1pm-1 +…+bm) x(t) + (c0pk +c1pk-1 +…+ck) f(t) Чтобы привести уравнение (1.6) к такому виду, разделим левую и правую его части на an и получим 1 an n-1pn-1 ... T p+1 y(t) = Tnn pn Tn-1 1 = k1 k 2p+...+k m+1pm x(t) + k m+2 +...+k m+k+2pk f(t) (1.8) Тn , Тn-1 ,…, Т1 называются постоянными времени, они имеют размерность времени [с] и характеризуют инерционные свойства элемента; k1 раз м.Y раз м.X , … , km+1 m раз м .Y c раз м .X km+2 раз м.Y , … , km+k+2 раз м.F c k раз м.Y раз м.F коэффициенты передачи Вторая стандартная форма записи операторный метод или метод Лапласа решение дифференциальных уравнений сводится к алгебраическим действиям в дифференциальном уравнении 1. вместо реальных функций времени записать их изображения по Лапласу 2. в полиномах символ дифференцирования p заменить на оператор Лапласа s Применив к дифференциальному уравнению (1.7) преобразование Лапласа, получим D(s) Y(s) = N(s) X(s) + M(s) F(s) (1.9) где s – оператор Лапласа; Y(s), X(s), F(s) - изображения по Лапласу выходной и входной величин элемента и внешнего воздействия m n ni N(s) = b sm- i D(s) = a s i=0 i i=0 i k M(s) = c sk- i i=0 i полиномы степени n, m, k от оператора Лапласа s. Оператор Лапласа s представляет собой комплексную величину s=c+j c=Re s - абсцисса абсолютной сходимости =Im s –угловая частота, имеющая размерность [рад/с] Для перехода от реальных функций времени оригиналов к их изображениям по Лапласу и наоборот вводят Прямое интегральные преобразование Xs L[x(t)] = x(t) e- stdt 0 Обратное интегральные преобразования c+ j 1 st y(t) = L- 1[Y(s)] = Y(s) e ds j 2 c- j (1.7) (1.9) D(p) y(t) = N(p) x(t) + M(p) f(t) D(s) Y(s) = N(s) X(s) + M(s) F(s) Алгебраическое уравнение изображений функций времени по Лапласу дифференциальное уравнение реальных функций времени Обозначим Wx (s) N(s) D(s) M(s) Wf (s) D(s) передаточные функции (1.9) принимает вид второй стандартной записи Y(s) = Wx(s) X(s) + Wf(s) F(s) Если f(t) = 0, то F(s) = 0 и тогда Y(s) W (s) = x X(s) - передаточная функция элемента по входу Х Eсли x(t)=0, то X(s)=0 и тогда Y(s) W (s) = f F(s) - передаточная функция элемента по входу F f(t) x(t) y(t) элемент