Обратная решетка. Основные аксиомы. Основные свойства 10.
реклама

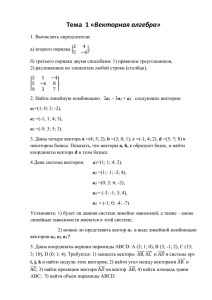
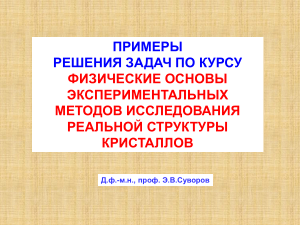
10. Обратная решетка. Основные аксиомы. Основные свойства обратной решетки. Связь прямой и обратной решеток. Фурьеанализ и обратное пространство. Обратная решетка a,b,c rj am bn cp Здесь m,m,p–целые числа a , b , c H ha kb lc Здесь h,k,l – тоже целые числа (a,a* ) = (b,b* ) = (c,c* ) 1 * * * * * * ( a ,b ) = ( a ,c ) = ( b ,a ) = ( b ,c ) = ( c ,a ) = ( c ,b )0 Эти два тождества определяют положения векторов обратной решетки О чем говорит последнее тождество. Например, равенство (a,b*)=(c,b*)=0 говорит о том, что вектор b* перпендикулярен к плоскости, в которой лежат вектора a и c. Соответственно равенство (a,c*)=(b,c*)=0 указывает на то, что вектор c* перпендикулярен к плоскости, в которой лежат вектора, a и b. Ну а равенство (b,a*)=(c,a*)=0 свидетельствует о том, что вектор a* - перпендикулярен к плоскости, в которой лежат вектора b c. Следовательно, можно записать a* bc 1 * b 2 ca c* ab 3 Здесь α1, α2, α3 неизвестные коэффициенты пропорциональности. Воспользуемся первым условием для векторов обратной решетки. Подставим в него полученные нами значения векторов обратной решетки a,a* = b,b* = c,c* = a,1 bc = b,2 ca = c,3 ab 1 Последние три равенства можно переписать так 1 a, bc 2 b, ca 3 c, ab 1 Из векторной алгебры известно, что смешанное произведения трех векторов a,b,c образующих параллелепипед равно объему этого параллелепипеда. Т.е. V a bc = b ca = c ab c b a Тогда 1 1 2 3 V и следовательно * 1 a V bc * 1 b ca V * 1 c V ab Свойства вектора обратной решетки H ha* kb* lc* z C H c/l y b/k O B a/h A x 1. Вектор обратной решетки H всегда перпендикулярен плоскости прямой решетки с индексами (hkl). Если две любых прямых линии лежащих в любой плоскости перпендикулярны какому либо вектору не лежащему в этой плоскости - этот вектор обязательно перпендикулярен этой плоскости Выберем три вектора AB, CB, CA лежащих в плоскости ABC и определим их величины b a b c a c AB OB - OA CB OB - OC CA OA - OC k h k l h l Два вектора перпендикулярны друг другу, если их скалярное произведение равно нулю * b a b a * * H, ha kb lc , 11 0 k h k h * b c b c * * H, ha kb lc , 11 0 k l k l * a c b c * * H, ha kb lc , 11 0 h l k l (a,a* ) = (b,b* ) = (c,c* ) 1 * * * * * * (a,b ) = (a,c ) = (b,a ) = (b,c ) = (c,a ) = (c,b ) 0 Определение векторов обратной решетки Следовательно вектор обратной решетки H всегда перпендикулярен плоскости прямой решетки с индексами (hkl) !!! 2. Модуль вектора обратной решетки H всегда равен обратной величине межплоскостного расстояния для плоскостей прямой решетки с индексами (hkl) z Трехмерную решетку любой симметрии можно представить как набор семейств плоскостей с индексами (hkl), (h1k1l1), (h2k2l2), …. (hkl) y x 1 H d hkl Выберем в прямом пространстве любую плоскость ABC с идексами Миллера (hkl). Пусть вектор n - единичны вектор нормали к этой плоскости, а вектор R текущий радиус-вектор точки лежащей на плоскости ABC. Пусть также s – кратчайшее расстояние от начала координат до плоскости ABC. Тогда уравнение любой такой плоскости можно записать в виде R,n s или H R , Sd H s=Sd Здесь d межплоскостное расстояние для этой системы плоскостей, S – целое число (например, для плоскости проходящей через начало координат S=0) n H H - единичный вектор нормали к плоскость R ma nb pc Запишем текущий радиус-вектор плоскости ABC Тогда уравнение плоскости можно переписать в виде Sd 1 1 1 * * * R, H ( m a n b p c , h a k b l c ) mh nk pl H H H Вспоминая, что выражение (mh+nk+pl)=S это уравнение плоскости, получим 1 d H или 1 H d hkl