Силовой анализ механизма с гидроцилиндром
реклама

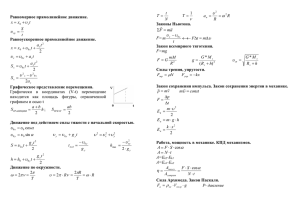
Лекция №7 Силовой анализ механизма с гидроцилиндром графоаналитическим методом Расчетная схема механизма показана на рис. 2.20, а. На схеме не указаны силы инерции и моменты сил инерции звеньев, которыми можно пренебречь ввиду их малости. На первом этапе расчета определим силы в кинематических парах А, В, С рассматривая весь механизм как неделимую структурную единицу. При этом мысленно “заморозим” поршень в гидроцилиндре в расчётном положении. t M B 0 или F34h F FПГ3 h F3 G3h G3 FC3h FC3 FMT3 h FMT3 ОФС t 34 3 FПГ 3h F 3 G 3h G 3 FC3h FC 3 FMT3h FMT 3 h Ft 34 где FMT3 MT3 t F34 M B 0. 1, 2 F14t CB h Ft G1h G1 G 2h G 2 FПГ1 h FП1 FПГ 2 h FП 2 0. 14 F14 F14 FПГ1 G1 FПГ 2 G 2 FПГ 3 G 3 FC3 F34 F34 0. n // AB t t n // CB (2.113) Планы сил механизма с гидроцилиндром Для определения нормальных составляющих сил в кинематических парах составим векторное уравнение равновесия механизма с “замороженным” гидроцилиндром, сгруппировав силы по звеньям: n t t n (2.113) F14 F14 FПГ1 G1 FПГ2 G 2 FПГ3 G 3 FC3 F34 F34 0 // AB // CB Масштабный коэффициент сил определим по максимальной известной силе, у нас FC3 . F (2.114) K F C3 Z FC3 Величина масштабного коэффициента определяет отрезки, изображающие другие известные силы G Ft ZG1 1 ; ZF14t 14 и т.д. KF KF Алгоритм определения силовых параметров с помощью плана сил механизма с гидроцилиндром Точка пересечения двух линий, параллельных АВ и СВ определяет на них отрезки ZF14n и Z F34n , n n изображающие векторы сил F14 и F34 . n F14n K F ZF14n ; F34 K F ZF34n F 0 3 или FПГ3 G 3 FC3 F34 F32 0 (2.115) откуда F32 K F ZF32. F 0 2 F 21 FПГ2 G 2 F23 FT 21 Fy 0 // AB AB здесь F 21 F21 F21 , F23 F32. Величины F y и F 21 определяются из плана сил (рис. 2.20, б). Fy K F ZFy ; F 21 K F ZF 21 Z F 21 ввиду малости на плане сил не показана. (2.116) Mk 0; 2 ) M k (G 2 ) M k (FПГ 2 ) M k (F23 ) 0; M k (F21 Откуда M (G ) M k (FПГ 2 ) M k (F23 ) F F F . k 2 F21 , 21 21 21 kk (2.117) Упрощенный силовой анализ механизма с гидроцилиндром В реальных механизмах с гидроцилиндром, как правило, сила тяжести звеньев 1 и 2 гидроцилиндра бывает пренебрежимо мала по сравнению с силой тяжести звена 3 и другими силами, приложенными к выходному звену. В этом случае силовой расчет механизма значительно упрощается. Для рассматриваемого механизма с гидроцилиндром при пренебрежении массами звеньев 1 и 2 на звеньях механизма будут действовать силы G3 , FПГ3 , FC3 , FMT3 , FT 21. t Касательная составляющая силы в шарнире С F34 не изменит своего значения, тогда как касательная составляющая силы в шарнире А Ft 14 и силы F21 и F21 будут равны нулю. Таким образом, сила в шарнире F 23 окажется направленной вдоль линии оси гидроцилиндра. План сил такого механизма представлен на рис. 2.20, в. Применение принципа возможных перемещений для определения уравновешивающего момента или уравновешивающей силы Согласно принципу возможных перемещений сумма элементарных работ всех сил и моментов, приложенных к системе, находящейся в равновесии, на возможных перемещениях системы равна нулю n n (2.118) Fi d Si cos(Fi , d Si ) M i di 0 1 1 Для механизма возможными перемещениями звеньев и точек приложения сил будут их действительные перемещения, являющиеся функциями положения начального звена. Если приложить к звеньям механизма силы инерции, то можно рассматривать его в состоянии динамического равновесия. Так как силы, действующие в кинематических парах, являются внутренними, то уравнение (2.118) позволяет найти величину уравновешивающего момента или уравновешивающей силы без их предварительного определения. Записанное выше уравнение (2.118) неудобно для практического использования, поэтому возьмем сумму элементарных работ в единицу времени; тогда, принимая во внимание, что dSi di i и i , dt dt получим n m Fi i cos(Fi , i ) Mii 0, 1 (2.119) 1 где суммирование проводится по всем n силам и m моментам сил всех звеньев механизма, а каждое слагаемое представляет собой мощность силы или момента. Так как скорости точек приложения сил и угловые скорости звеньев известны по величине и направлению из кинематического расчета, то единственным неизвестным является искомая величина уравновешивающего момента (или уравновешивающей силы). Определение уравновешивающего момента в кривошипно-ползунном механизме. Условие эквивалентности мощностей сил и моментов имеет вид G1 Sц cos(G i , Sц ) FПГ1 Sц cos(FПГ1 , Sц ) G 2 Sn cos(G 2 , Sn ) FПГ 2 Sn cos(FПГ 2 , Sn ) G 3 S3 cos(G 3 , S3 ) FПГ 3 S3 cos(FПГ 3 , S3 ) FC3 S3 cos(FC3 , S3 ) M T 33 FT 21 21 Fy 21 0 M y (2.120) Определение уравновешивающей силы в механизме с гидроцилиндром Условие эквивалентности мощностей сил и моментов имеют вид G1 Sц cos(G i , Sц ) FПГ1 Sц cos(FПГ1 , Sц ) G 2 Sn cos(G 2 , Sn ) FПГ 2 Sn cos(FПГ 2 , Sn ) G 3 S3 cos(G 3 , S3 ) FПГ 3 S3 cos(FПГ 3 , S3 ) FC3 S3 cos(FC3 , S3 ) M T 33 FT 21 21 Fy 21 0 Fy (2.121) Рычаг Жуковского Графоаналитическое решение уравнения (2.119) предложил Н.Е. Жуковский в виде рычага Жуковского. Пусть к звену ВС в точке S (рис. 2.23, а) приложена сила F любой природы. S - вектор абсолютной скорости точки приложения силы F . Угол есть угол (F , S ) . Повернем вектор скорости S в любую сторону на 90° и в конец повернутого вектора скорости перенесем параллельно самому себе вектор силы F ( S и F на рис. 2.23, а). h . Так как S S и F F , то Тогда S cos F S cos( F , S ) F S cos F h (2.122) Если учесть, что начало векторов абсолютных скоростей всех точек располагается в полюсе плана скоростей механизма, то теорему Жуковского можно сформулировать следующим образом. Если векторы всех сил, приложенных к различным точкам звеньев механизма, перенести параллельно самим себе в одноименные точки повернутого на 90° плана скоростей, приняв фигуру плана за жесткий рычаг, то момент каждой силы относительно полюса плана скоростей будет пропорционален ее мощности, а сумма моментов всех указанных сил будет равна нулю. Рычаг Жуковского для кривошипно-ползунного механизма MP 0 или ( FC 3 FT 3 FПГ 3 Fu 3 ) рb Fu 2 hu 2 G2 hG 2 (2.123) FПГ 2 hГ 2 FMu 2 ab FМу рa 0. отсюда FMy ( FC 3 FT 3 FПГ 3 Fu 3 ) pb Fu 2 hu 2 G2 hG 2 FПГ 2 hГ 2 FMu 2 ab / pa. M y FMy 1 (2.124) Рычаг Жуковского для механизма с гидроцилиндром Уравновешивающая сила Fy определяется из уравнения M 0 или G 1h G1 FПГ1h FП1 G 2 h G 2 FПГ 2 h FП 2 G 3 h G 3 FПГ3 h FП 3 (2.125) FC3 h FC3 FMT3 h FMT3 FT 21h y Fy h y 0. Отсюда Fy (G1h G1 FПГ1h FП1 G 2 h G 2 FПГ 2 h FП 2 G 3 h G 3 FПГ3 h FП 3 FC3 h FC3 FMT3 h FMT3 FT 21h y ) / h y . (2.126)