Выпускная работа «Комплексная обработка измерений
реклама

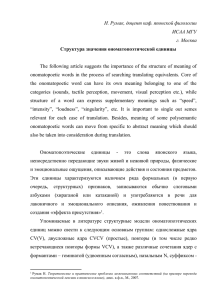
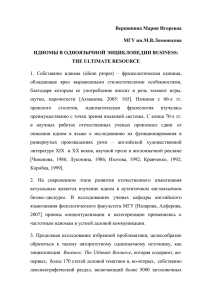
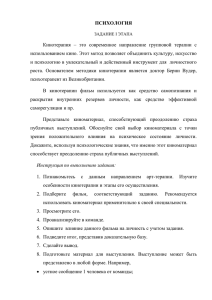
«Комплексная обработка измерений спутникового радионавигационного приёмника и доплеровского измерителя скорости» студент: Добрецов А.А. Научный руководитель: Куликов Р.С. Актуальность темы Совершенствование радиотехники в области навигационных систем связано с увеличением объема и качества решаемых задач. К современным навигационным системам предъявляются высокие требования по показателям качества. Объединяя навигационные системы, работа которых основана на различных физических принципах, можно повысить практически значимые для потребителя характеристики навигационной системы за счёт взаимного компенсирования принципиальных недостатков одной системы принципиальными достоинствами другой. Постановка задачи Имеется летательный аппарат, на борту которого установлена аппаратура ДИСС и НАП СНС. Полагаем, что рассматривается прямолинейный горизонтальный полёт на постоянной высоте. Полагаем, что навигационная информация от ДИСС поступает с большей частотой, чем от НАП СНС и моменты поступления навигационной информации от НАП СНС совпадают с тактами поступления навигационной информации от ДИСС. Нарушение работы НАП СНС возможно, а ДИСС всегда работает без сбоев. Требуется разработать фильтр, производящий совместную обработку результатов навигационных измерений обеих систем (ДИСС и НАП СНС). Совместную обработку производить по двум компонентам горизонтальной скорости (север-восток), вертикальная составляющая полагается постоянной и не принимается в рассмотрение. НАП СРНС Достоинства: отсутствие ограничений на число потребителей; большая высота полета спутников позволяет создать глобальную, то есть охватывающую весь земной шар, зону действия при использовании достаточно простых антенных и приёмных устройств, что важно для обеспечения большого числа потребителей недорогой аппаратурой; нахождение спутника в пределах прямой видимости в любой точке зоны действия его радиотехнических средств позволяет использовать наиболее помехоустойчивые диапазоны радиоволн и передавать сигналы с наименьшими искажениями; высокая точность определения координат. Недостатки: относительно высокий уровень шумов; низкий темп выдачи данных; возможность отсутствия навигационных определений. ДИСС Достоинства: автономность; низкий уровень шумовой составляющей; высокий темп выдачи данных; Недостатки: зависимость точности от вида подстилающей поверхности; накапливающаяся ошибка измерения координат. Модель измерений НАП СРНС: Модель измерений ДИСС: Составляющие истинной горизонтальной скорости потребителя аппроксимируем винеровскими случайными процессами: nN VN Vk V k 1 nk k 1 k VE k 1 nEk Выходные оценки НАП СРНС: ykÍÀÏ ,Õ Выходные оценки ДИСС: ÍÀÏ Bˆ k Bk nBk Lk nLÍÀÏk Lˆk Vˆ ДИСС VN 1 M VN nNДИСС k k ykДИСС NДИСС k ДИСС ˆ VE k 1 M VE nEk VE k Vˆ НАП VN nNНАП k k ykНАП ,V NНАП k НАП ˆ VE k nEk VE k Вектор состояния для оценивания в общем для НАП СНС и ДИСС фильтре Калмана: VN VE xk M VN M VE xk xk 1 nx k Модель наблюдений НАП СРНС с учётом введённого вектора состояния: ~ (1) VN k ÍÀÏ ˆ ÍÀÏ ÍÀÏ x ÍÀÏ y k h ( xk ) n k n k ~ k ( 2) n kÍÀÏ VE k xk Матрица наблюдений: H h ÍÀÏ Математическая модель истинного вектора состояния: 1 0 0 0 ~ xk x ~xk 0 1 0 0 VN k 1 VE k 1 M VN M VE nN k nE k f ( xk 1 ) nx k 0 0 Модель наблюдений ДИСС с учётом введённого вектора состояния: (1) (1) (3) xk xk xk ˆ ÄÈÑÑ ÄÈÑÑ VN k VN k M VN ÄÈÑÑ ÄÈÑÑ yk h ( xk ) n k nk ( 2 ) ( 2 ) ( 4 ) n kÄÈÑÑ VE k VE k M VE xk xk xk Матрица наблюдений: ~ (3) ~ 1 xk 0 H h xk x ~xk ~ ( 4) 0 1 xk ~ (1) xk 0 0 ~ ( 2) xk Алгоритм квазиоптимального расширенного фильтра Калмана 1. Этап экстраполяции VˆN k 1 VˆE k 1 ~ ˆ xk xk 1 ˆ f xˆk 1 M VN k 1 Mˆ Переходная матрица фильтра Калмана: Fk 1 f xˆ k 1 x xˆ k 1 VE k 1 Экстраполированная оценка матрицы дисперсий фильтра Калмана: ~ T Dk Fk 1 Dˆ k 1 Fk 1 Qk 1 Оценка матрицы дисперсий на начальном такте: Dˆ 01 0 0 0 0 0 0 0 0 0 0 M2 V 0 0 0 0 M2 V 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 Матрица дисперсий формирующих шумов: n2V 0 0 n2V Qk 1 Q 0 0 0 0 0 0 0 0 0 0 0 0 Алгоритм квазиоптимального расширенного фильтра Калмана 2. Этап оценивания. Вектор невязки измерений: ÄÈÑÑ ~ ~ Ä k yk h( xk ) h( xk ) n kÄÈÑÑ h( xk ) Матрица дисперсий шумов измерений ДИСС: Rk R n2 ÄÈÑÑ V 0 0 n2 ÄÈÑÑ V Матрица дисперсий невязки измерений: ~ T Sk H k Dk H k Rk Квазиоптимальные значения коэффициентов усиления общего фильтра Калмана: ~ T 1 K k Dk H k S k Формирование оценки вектора состояния ˆ ~ xk xk K k Ä k xˆk 1 K k Ä k Формирование оценки матрицы дисперсий: ˆD I K H D~ k k k k Северная составляющая скорости и её оценка 100 0 200 400 600 800 110 3 100 200 300 Время, с Рисунок 1. Реализация северной составляющей скорости (коричневая непрерывная кривая) и её оценки в НАП СНС (синяя пунктирная кривая) и ДИСС (красная пунктирная кривая). Северная составляющая скорости и её оценка 100 0 200 400 600 800 110 3 100 200 300 Время, с Рисунок 2. Реализация северной составляющей скорости (синяя непрерывная кривая) и её оценка в интегрированной навигационной системе (красная пунктирная кривая) Смешения масштабных коэффициентов 0.4 0.2 MN 0 200 400 600 800 M1E10 3 0.2 0.4 Время, с Рисунок 3 . Оценивание смещений масштабных коэффициентов: северного (красная непрерывная кривая) и восточного (синяя пунктирная кривая). Пунктирными уровнями отмечены истинные смещения масштабных коэффициентов. Ïåðåìåùåíèå è åãî îöåíêè, ì 1.510 5 110 5 510 4 110 3 1.510 3 210 3 Âðåìÿ íàáëþäåíèÿ, ñ Рисунок 4 . Истинное перемещение летательного аппарата (зелёная непрерывная кривая) и его оценки в автономном ДИСС (синяя непрерывная кривая) и в интегрированной навигационной системе после отключения НАП СНС (красная пунктирная кривая). Îøèáêà îöåíêè ïåðåìåùåíèÿ, ì 210 210 4 410 4 610 4 3 410 3 610 3 810 3 110 4 Âðåìÿ íàáëþäåíèÿ, ñ Рисунок 5 . Ошибка оценивания перемещения летательного аппарата в автономном ДИСС (красная непрерывная линия) и в интегрированной навигационной системе с отключенным ДИСС и оцененными смещениями масштабных коэффициентов. Выводы Проведение комплексной обработки и оценивание с её помощью смещений масштабных коэффициентов ДИСС позволяет повысить точность работы ДИСС при отключении НАП СНС. Снижение ошибки измерения перемещения (координат) летательного аппарата в интегрированной навигационной системе по сравнению с классическим автономным ДИСС можно оценить как десятикратное. Для достижения преимущества интегрированной навигационной системы перед автономным ДИСС необходимо, чтобы отключению НАП СНС (момент которого неизвестен и случаен) предшествовал этап комплексной обработки измерений НАП СНС и ДИСС минимальной длительностью 100 – 300 с.