тема. механические передачи.лекция № 2. общие
реклама

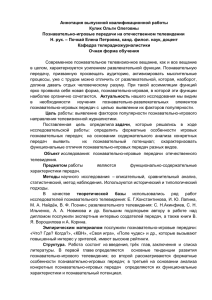
ТЕМА. МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ. ЛЕКЦИЯ № 2. ОБЩИЕ СВЕДЕНИЯ. КОНТАКТНЫЕ НАПРЯЖЕНИЯ Вопросы, изложенные в лекции 1 Общие сведения. Классификация механических передач. 2 Привод. Основные кинематические и силовые характеристики передач. 3 Кинематические схемы передач. 4 Контактные напряжения. Общие сведения Механическими передачами называются механизмы, которые преобразуют движение от двигателя к исполнительным органам машины. Механическая энергия передаётся, как правило, с преобразованием скоростей и вращающих моментов, а иногда с преобразованием вида и закона движения. Общая классификация передач передачи вращения (зубчатые, червячные, волновые, ременные и т.д.); – передачи, преобразующие вращательное движение в поступательное (винтовые скольжения, шариковинтовые); – передачи, преобразующие движение по заданному закону (рычажные, кулачковые, мальтийские и т.д.). – Классификация механических передач Механические передачи, применяемые в машиностроении, классифицируют таким образом: по принципу передачи движения – передачи трением – фрикционная (рисунок 1, а) и ременная (рисунок 2, а); – зацеплением – зубчатые (рисунок 1, б), червячные (рисунок 1, в); цепные (рисунок 2, б); передачи винт-гайка (рисунок 1, г, д); по способу соединения деталей – передачи с непосредственным контактом тел вращения (фрикционные, зубчатые, червячные, передачи винт-гайка (см. рисунок 1); – передачи с гибкой связью – ременная, цепная (см. рисунок 2). Механические передачи с непосредственным контактом тел вращения Рисунок 1 – Передачи: а – фрикционная передача; б – зубчатая передача; в – червячная передача; г, д – передачи винт-гайка Передачи с гибкой связью а) б) Рисунок 2 – Передачи с гибкой связью: а - ременная; б - цепная Привод. Основные кинематические и силовые характеристики передач Привод – устройство, приводящее в движение машину или механизм. В общем виде привод включает в себя двигатель и передаточный механизм (рисунок 3, 4). Передаточное отношение i – отношение угловых скоростей (частот) на входе и на выходе кинематической цепи: Передаточное число u – отношение начальных или делительных диаметров (чисел зубьев зубчатых) колес на выходе и на входе кинематической цепи: В передаче, понижающей частоту вращения n (угловую скорость ω), u > 1; при u < 1 частота вращения (угловая скорость) повышается. Кинематическая схема привода Рисунок 3 – Привод: 1 – электродвигатель; 2 – ременная передача; 3 – цилиндрическая зубчатая передача; 4 – цепная передача Кинематическая схема привода ленточного транспортера Рисунок 4 – Привод: а – двухступенчатый цилиндрический редуктор; б – коническо-цилиндрический редуктор; в – коническо-цилиндрический навесной редуктор Редуктор. Мультипликатор. Коробка скоростей (передач). Вариатор Если механизм, состоящий из одной или нескольких пар зубчатых колес, размещенных в корпусе, предназначен для уменьшения частоты вращения, то он называется редуктором, а служащий для увеличения частоты вращения – мультипликатором. Редуктор и мультипликатор имеют постоянное передаточное отношение (число). Дискретное изменение передаточного отношения можно получить с помощью механических передач, имеющих подвижные в осевом направлении колеса. Это обеспечивает зацепление колес разных групп и позволяет регулировать частоту вращения на выходном валу. Такие передачи называются коробками передач (скоростей). Устройство для бесступенчатого (плавного) регулирования скорости выходного звена называется вариатором. Кинематические схемы передач а б в Рисунок 5 – Схемы передач: а – одноступенчатая; б – 3-х ступенчатая развернутая; в – коробка скоростей Основные кинематические схемы и характеристики передач Рисунок 6 – Различные схемы механических передач Колесо, которое инициирует движение, называется ведущим. Передаточное отношение кинематической цепи, состоящей из N последовательно установленных механических передач, находят как Контактные напряжения Контактными называются напряжения, возникающие в месте контакта двух деталей, когда размеры площадки контакта малы по сравнению с размерами деталей. Эти напряжения имеют местный характер и быстро убывают по мере удаления от зоны контакта. Поверхность контакта катящегося по плоскости шара ограничена эллипсом, уравнение которого записывают как Напряжения (нормальные) по площадке соприкосновения (касания) распределяются по закону эллипсоида. Величина наибольших напряжений в центре эллипса касания для этого случая равна Расчетная схема для определения напряжения в зоне контакта цилиндров где: Р – нагрузка в контактной зоне, Н; Е – модуль упругости Юнга, МПа; q – распределенная нагрузка Н/м; b – длина зоны контакта, м. Рисунок 7 – Касание двух цилиндров с радиусами R1 и R2 по линии (полосе) с параллельными осями