Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ
Реклама

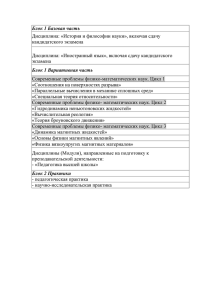
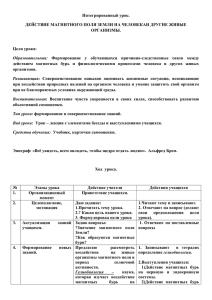
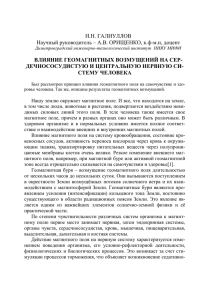
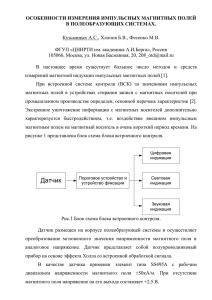
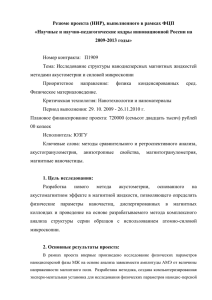
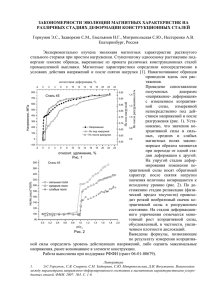
Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Корректирующие системы (КС) используются для повышения однородности поляризующего магнитного поля. Известно, что скалярный магнитный потенциал является решением уравнения Лапласа 2 2 2 2 2 2 0 2 x y z где , (2.1.1) – оператор Лапласа. От скалярного магнитного потенциала к вектору магнитной индукции можно перейти при помощи соотношения B (2.1.2) Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Если Bx , B y << B0 , то только B z - компонента магнитного поля является определяющей. Величина B z и ее производные могут быть разложены в ряд по сферическим гармоникам с помощью соотношения sin , (2.1.4) Bz cos r где , r r r – сферические координаты. Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ В прямоугольной системе координат, для первых членов этого ряда, получаем Bz A10 2 A20 z 3 A21 x 3B21 y 3 A30 2 z 2 x 2 y 2 / 2 12 A31 zx 12 B31 zy 15 A32 x 2 y 2 15 B32 (2 xy ) A40 z 8 z 2 15( x 2 y 2 ) / 2 15 A41 x 4 z 2 x 2 y 2 / 2 15 B41 y 4 z 2 x 2 y 2 / 2 90 A42 z x 2 y 2 90 B42 z 2 xy 105 A43 x x 2 3 y 2 105 B43 y 3x 2 y 2 • • (2.1.5) Расположение проводников выбирается так, чтобы в начале координат обращались в нуль нежелательные компоненты индукции поля. • Затем уточняется конфигурация обмоток системы с целью повышения точности воспроизведения ее магнитным полем желаемой функции. Этого можно добиться, минимизируя, например, методами многопараметрической оптимизации, отклонение поля системы от желаемого. Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ КС С АКСИАЛЬНОЙ СИММЕТРИЕЙ КС с аксиальной симметрией строятся из проводников в форме кругового витка или дуги с током. ОСНОВНЫЕ МАТЕМАТИЧЕСКИЕ СООТНОШЕНИЯ Аксиальная составляющая индукции магнитного поля кругового витка с током определяется следующим образом: 0 I 2 R( R r cos0 ) d 0 Bz 2 0 R 2 r 2 2 r R cos ( z z ) 2 0 0 3/ 2 , (2.2.1) • где 0 – магнитная постоянная; I – ток; R – радиус витка; r, z – радиальная и аксиальная координаты точки наблюдения; z 0 – аксиальная координата центра витка. Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Выражение для аксиальной составляющей индукции магнитного поля дугового участка с центральным углом 21 получим, изменяя пределы интегрирования 0 I R( R r cos0 ) d0 BzA 2 0 R 2 r 2 2 r R cos ( z z ) 2 0 0 3/ 2 . (2.2.2) В декартовой системе координат (рис.2.2.1), при x / R , y / R z/R и 0 z 0 / R , выражение (2.2.2) принимает вид 0 I 1 cos0 sin 0 d0 BzA 2R 0 cos 2 sin 2 ( ) 2 0 0 0 3/ 2 . (2.2.3) Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Рис. 2.2.1. К выводу формулы B z для дугового участка Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Индукцию магнитного поля от остальных дуговых участков В, С и D, необходимую для расчета КС, можно рассчитать по следующим формулам: BzB 1 cos0 sin 0 d0 0 I 2R 0 cos 2 sin 2 ( ) 2 0 0 0 , (2.2.4) BzC 1 cos0 sin 0 d0 0 I 2R 0 cos 2 sin 2 ( ) 2 0 0 0 , (2.2.5) BzD 1 cos0 sin 0 d0 0 I 2R 0 cos 2 sin 2 ( ) 2 0 0 0 . (2.2.6) 3/ 2 3/ 2 3/ 2 Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ КС ВТОРОГО ПОРЯДКА По разложению (2.1.5) системам второго порядка соответствуют корректоры Z ,2 ZX, ZY, XY , X 2 Y 2. Поле, пропорциональное z x создает система катушек, показанная на рис.2.2.2. Для этого корректора, при указанном на рисунке направлении тока, выражение для аксиальной составляющей магнитного поля (2.2.3) раскладывается в степенной ряд 1 2 BzA 1 4 BzA 2 (2.2.21) 4 . Bz 2 2! 4! 3 Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Рис. 2.2.2. Корректор ZX , ( ZY ) Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Отсюда видно, что полезную составляющую поля создает первый член ряда. Остальные члены искажают его характер. Таким образом, задача получения нужного магнитного поля сводится к минимизации второго и последующих членов ряда. Следует заметить, что угловой размер дуги для корректирующих катушек обычно составляет 90°. • Скомпенсируем второй член разложения (2.2.21), решая уравнение 4 B 3 0 . В результате, получим 0 0.68. • Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Расчеты показывают, что при этом рабочий объем компенсатора с отклонением поля от идеального до 10% представляет собой сферу радиусом не более 45% радиуса дуговых участков (относительный рабочий объем – 45%). Используя в качестве параметров оптимизации относительное положение дугового проводника и угловой размер дуги , а в качестве критерия оптимизации – минимум отклонения поля от теоретического, минимизируем остальные члены ряда (2.2.21). В результате получим 0 0,72, 90 0, что приводит к увеличению относительного рабочего объема до 58%. Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Корректор ZY аналогичен корректору ZX , но развернут относительно корректора вокруг оси на 90°. Поле, пропорциональное ZX создает система катушек, показанная на рис.2.2.3. Для этого корректора, при указанном на рисунке направлении тока, выражение для аксиальной составляющей магнитного поля (2.1.5) раскладывается в степенной ряд 1 2 BzA 1 4 BzA 2 4 (2.2.22) Bz 2 . 2 2! 4! Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Рис. 2.2.3. Корректор XY , ( X 2 Y 2 ) Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Здесь первый член ряда характеризует полезное поле, а остальные члены – его искажение. Учитывая, что каждая секция корректора содержит два дуговых проводника, решим систему уравнений • 4 BzA ( 01 ) 0, 2 4 BzA ( 02 ) 0. 2 (2.2.23) В результате получим относительные положения дуговых проводников 01 0.33 , 02 1.93 . При угловом размере дуговых проводников 90°, корректор имеет относительный рабочий объем 42%. Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Кроме малого относительного рабочего объема, такой корректор имеет еще один недостаток. Его длина вдоль оси Z велика ( 02 1.93 ), тогда как относительная длина систем поляризующего магнитного поля может быть менее 1.9. Так магнитная система десятого порядка, рассчитанная в первой части, имеет относительную длину 1.8. Имеется возможность компактирования корректора. Для этого решим уравнение 4 BzA ( 01 ) 4 BzA ( 02 ) 0. 2 2 (2.2.24) Расчет и проектирование магнитных систем. Лекция 14 РАСЧЕТ КОРРЕКТОРОВ Это уравнение имеет множество решений, поэтому, решая (2.2.24), необходимо следить за алгебраической суммой первых членов (2.2.21), определяющей полезное поле, с тем, чтобы это поле оставалось достаточным по величине. Остановимся на решении 01 0.31 , 02 1.57 . Очевидно, рабочий объем корректора при этом не меняется. Использование оптимизации приводит к решению 01 0.33, 02 1.14, 103°. При этом относительный рабочий объем корректора увеличивается до 60%. Корректор X 2 Y 2 можно получить, повернув корректор XY на 45° вокруг оси Z . Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ ПЛАНАРНЫЕ КС Планарные корректоры второго порядка описаны в работе Андерсона. Они состоят из прямолинейных проводников, создающих токовые петли различной конфигурации. Расчеты полей выполнены в приближении, что рабочие прямолинейные проводники имеют бесконечную длину. На практике рабочие проводники должны иметь длину не более 22,5 величины межполюсного расстояния магнитной системы. Кроме того, не учтено поле так называемых боковых проводников, соединяющих рабочие проводники. Поэтому уточним результаты расчетов корректоров второго порядка, оптимизируя положение рабочих проводников с учетом их конечной длины и влияния боковых проводников. Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ ОСНОВНЫЕ ФОРМУЛЫ Направим ось Z декартовой системы координат перпендикулярно пластинам КС, а ось X по направлению рабочих проводников. Тогда параллельная оси Z составляющая индукции поля бесконечно длинного прямолинейного проводника с током в точке с координатами , определяется выражением 0 I y y0 Bz • , (2.2.25) 2 2 2 y y 0 z z 0 • где 0 – магнитная постоянная; z 0 – половина расстояния между пластинами. Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ При x y z 0 , вводя относительную координату положения проводника y0 z0 , получим • 0 I Bz 2 2z0 1 . (2.2.26) Можно вывести выражения для составляющей индукции поля рабочих и боковых проводников конечной длины, лежащих в плоскости Z 0 , учитывая, что рабочие проводники параллельны оси X , а боковые – оси Y. Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ Составляющая индукции поля рабочего проводника с координатами начала x1 y 0 z 0 и конца x 2 y 0 z 0 определяется выражением 0 I y y0 x1 x x2 x Bz 2 2 2 2 2 4r r x1 x r x2 x где r 2 y y0 2 z z0 2 . • , (2.2.27) • • Составляющая индукции поля бокового проводника с координатами начала x0 y1 z 0 и конца x0 y 2 z 0 может быть получена следующим образом: , (2.2.28) 0 I x x0 y1 y y2 y Bz 2 2 2 2 2 4r r y1 y r y 2 y • где r 2 x x0 2 z z 0 2 . Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ Для кругового витка с центром на оси Z и радиусом R, лежащего в плоскости Z 0 , составляющая индукции поля B z • Bz 0 IR 2 2 R z z 0 2 3/ 2 . (2.2.29) Вводя относительную координату , получим 2 I • . (2.2.30) B 0 z 2 2 z0 1 2 3/ 2 Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ КС ВТОРОГО ПОРЯДКА Поле корректора ZY соответствует члену разложения (2.1.5), пропорциональному ZY, с производной 2 B z zy в качестве сомножителя. Необходимо компенсировать член разложения с производной 4 Bz z 3y . С этой целью, решим уравнение • • 0 I 4! 5 4 10 2 1 0 . 3 5 5 z y 2z 0 1 2 4 Bz (2.2.31) Отсюда следует, что рабочие проводники имеют относительные координаты 1 1.375 , 2 0.332 . Конфигурация корректора показана на рис.2.2.4. Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ Рис. 2.2.4. Корректор ZY, (ZX) Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ Расчеты показывают, что при этом рабочий объем корректора с отклонением поля от идеального до 10% представляет собой сферу диаметром не более 40% расстояния между пластинами (относительный: рабочий объем – 40%). Учитывая конечную длину рабочих и боковых проводников по формулам (2.2.27) и (2.2.28), и используя в качестве параметра оптимизации относительное положение рабочего проводника , а в качестве критерия оптимизации – минимум отклонения поля от теоретического, минимизируем остальные члены ряда. В результате, получим 1 1.420 , 1 1.420 , что приводит к увеличению относительного рабочего объема до 58%. Корректор имеет аналогичную топологию, но повернут относительно оси Z на 90 0 . Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ Поле, пропорциональное XY создает система катушек, показанная на рис.2.2.5. Необходимо компенсировать производную B z4 xyz 2 . Для этого, решая уравнение 0 I 4! 4 10 2 5 4 Bz (2.2.32) 0, xyz 2 2z 05 1 2 5 • найдем 0.726 , что дает расчетный относительный рабочий объем – 38%. Оптимизация, с учетом конечной длины проводников, позволяет получить уточненное решение: 0.746 и увеличить рабочий объем до 56%. Корректор X 2 Y 2 можно получить, повернув корректор X Y на 45° вокруг оси Z. Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ Рис. 2.2.5. Корректор XY, X 2 Y 2 Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ 2 Рис. 2.2.6. Корректор R Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ Корректор (рис.2.2.6) должен воспроизводить функцию, пропорциональную 2 z 2 x 2 y 2. В связи с этим, необходимо найти производную 4 B4 z 4 и приравнять ее к нулю. Решив уравнение 0 I 45 2 4 12 2 8 4 Bz 0, 4 5 11 / 2 z 2z 0 1 2 (2.2.33) получим относительные радиусы двух круговых витков , 1 3.36. 2 0.837 Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ В центре системы проводников необходимо устранить также первый член разложения (2.1.5), характеризующий постоянную составляющую индукции B z . Этого можно достигнуть, подбирая соотношение токов в круговых проводниках, путем решения уравнения на базе выражения (2.2.30) I1 I2 2 3/ 2 1 1 2 2 3/ 2 1 1 2 22 При полученных , I1 I 2 1,2 . . (2.2.34) Расчет и проектирование магнитных систем. Лекция 15 РАСЧЕТ КОРРЕКТОРОВ Сделать систему более компактной можно, решая следующую систему уравнений: • I112 14 1212 8 I 2 22 42 12 22 8 0, 2 11 / 2 2 11 / 2 1 1 1 2 2 2 3/ 2 I 1 2 1 1 . 3 / 2 I 2 2 2 1 1 2 (2.2.35) В современных планарных системах поляризующего магнитного поля не может быть больше 2.5. Поэтому из множества решений системы (2.2.35) выберем решение 1 2.0 , 2 0.85 , I1 I 2 0.9 . При этом расчетный относительный рабочий объем составляет около 50% и дальнейшего улучшения корректора не требуется.