ИССЛЕДОВАНИЕ РАЗЛИЧНЫХ МЕТОДОВ ОПТИМИЗАЦИИ ДИНАМИКИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПИТАНИЯ ВОДОЙ БАРАБАННЫХ
реклама

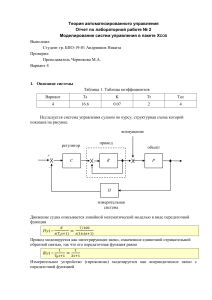
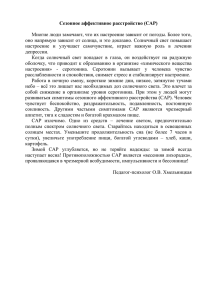
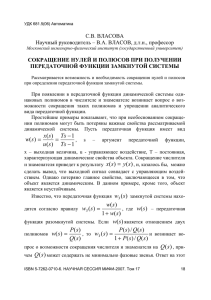
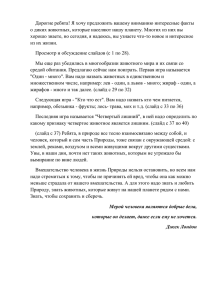
ИССЛЕДОВАНИЕ РАЗЛИЧНЫХ МЕТОДОВ ОПТИМИЗАЦИИ ДИНАМИКИ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПИТАНИЯ ВОДОЙ БАРАБАННЫХ КОТЛОВ И ПАРОГЕНЕРАТОРОВ ТЭС И АЭС Доктор технических наук, профессор КУЛАКОВ Г.Т. Белорусский национальный технический университет Аспирант КУХОРЕНКО А.Н. Командно-инженерный институт МЧС Республики Беларусь Слайд № 1 Типовая система автоматического регулирования уровня воды в барабане котла 1 – барабан парогенератора (котла); 2 – водяной экономайзер; 3 – регулятор питания; 4 – регулирующий клапан питательной воды; ЗРУ – задатчик ручного управления. Слайд № 2 Структурная схема типовой 3-х импульсной САР питания y(t) – основная регулируемая величина; xзд – заданное значение основной регулируемой величины; xр(t) – регулирующее воздействие; f1 – внутреннее возмущение; f2 – внешнее (топочное) возмущение; f2* – внешнее возмущение (расходом перегретого пара); Wр(р) – передаточная функция регулятора; Wв – передаточная функция топочного возмущения; Wв* – передаточная функция возмущения расходом перегретого пара; W1(р) – передаточная функция объекта регулирования; ГОС – главная обратная связь. Слайд № 3 Структурная схема моделирования предлагаемой САР питания y(t) – основная регулируемая величина; xзд1 – заданное значение промежуточной регулируемой величины; xзд2 – заданное значение основной регулируемой величины; y1(t) – промежуточная регулируемая величина; xр(t) – регулирующее воздействие; xк(t) – корректирующее воздействие; f1 – внутреннее возмущение; f2 – внешнее (топочное) возмущение; f2* – внешнее возмущение (расходом перегретого пара); Wр1(р) – передаточная функция стабилизирующего регулятора; Wр2(р) – передаточная функция корректирующего регулятора; Wв – передаточная функция топочного возмущения; Wв* – передаточная функция возмущения расходом перегретого пара; Wоп*(р) – передаточная функция опережающего участка объекта регулирования; W1(р) – передаточная функция объекта регулирования; W1*(р) – передаточная функция эквивалентного объекта регулирования; Wf2ук( р) – передаточная функция устройства компенсации; ГОС – главная обратная связь. Слайд № 4 Методика определения оптимальных параметров настройки регуляторов Wy , xзд ( р) Wр ( р)Wоб ( р) 1 Wр ( р)Wоб ( р) Wзд1 ( p) Wр1 ( p) Wэкв ( р) Wзд1 ( p) W1 ( p) (4) Wукf2 ( p) Wзд2 Wзд1 W1 1 (6) Wр2 ( p) (1) 1 Т зд1 р 1 2 (2) Wзд1 ( p) 1 (3) * Wоп ( р) 1 Wзд1 ( p) W ( p) 1 зд2 (5) Wэкв ( р) 1 Wзд2 ( p) 3 Т зд2 р3 2 2 4Т зд2 р Т зд2 р 1,5Т зд2 р 1 4 (7) f2 Wук ( p) 4 Т р 1 зд2 Слайд № 5 Переходные процессы в предлагаемой и типовой 3-х импульсной САР 1.8 1,4 Предлагаемая САР Метод ВТИ МПК в ЧВ Критерий оптимума 1.6 1,2 1.4 1 1.2 1 y, F1 у, Хзд 0,8 0,6 0.8 0.6 0,4 0.4 0,2 0.2 Предлагаемая САР Метод ВТИ МПК в ЧВ Критерий оптимума 0 -0,2 0 100 200 300 t, с 400 500 0 -0.2 600 0 100 200 300 400 Предлагаемая САР Метод ВТИ МПК в ЧВ Критерий оптимума 6 600 700 800 900 1 1 7 500 t, с Предлагаемая САР Метод ВТИ МПК в ЧВ Критерий оптимума 0.8 0.5 5 0.6 4 0.4 0 Xр, F2 y, F2 y, F2 3 0.2 2 -0.5 0 1 -0.2 0 -1 -2 Предлагаемая САР Метод ВТИ МПК в ЧВ Критерий оптимума -0.4 -1 -0.6 0 100 200 300 400 t, с 500 600 700 800 -1.5 0 100 200 300 400 500 t, с 600 700 800 900 0 50 100 150 200 t, с 250 300 350 400 Слайд № 6 Выводы: - быстродействие системы при отработке задания увеличивается в 2,5 раза, устраняются статические ошибки регулирования при отработке внутреннего и внешних возмущений; - максимальная динамическая ошибка регулирования при отработке топочного возмущения уменьшается в 2,5 раза, а время регулирования в 2 раза. При отработке возмущения расходом пара динамическая ошибка регулирования уменьшается на 30%, а время регулирования уменьшается в 2,5 раза; - уменьшение числа аварий, обусловленных перепиткой котла, или упуском уровня воды в его барабане, а также снижение повреждений котла и турбины в случае аварии; - повышение надежности оборудования и увеличение долговечности металла барабана и водяного экономайзера; - снижение потребления электроэнергии питательными насосами и приводом регулирующих клапанов. Слайд № 7 Спасибо за внимание Слайд № 8