Момент импульса
реклама

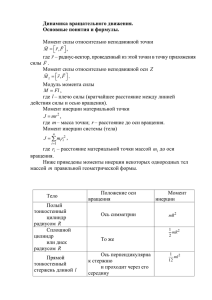
Закон сохранения момента импульса системы материальных точек Момент силы и импульса относительно точки и оси Статика – инженерная наука, изучающая равновесие твердых тел, находящихся под действием сил. Она необходима для определения максимально допустимых нагрузок. • Чтобы удержать тело в покое (равновесии), необходимо выполнение 2-х условий: Fi 0 1. Векторная сумма всех сил равна 0 2. Векторная сумма всех моментов сил равна 0 Мi 0 Момент силы F относительно неподвижной точки 0 – физическая величина, определяемая векторным произведением радиус-вектора r, проведенного из точки 0 в точку приложения M M r F sin , r sin l плечо силы. F r 0 l α M M xi M y j M z k , r M r F , M псевдовектор. силы, на силу F. Mx r F ,M y r F ,Mz r F . x y z z F M z M r 0 Момент силы относительно неподвижной оси – скалярная величина, равная проекции на эту ось вектора М относительно произвольной точки данной оси. Значение Мz не зависит от выбора положения точки 0 на оси z. Момент импульса (количества движения) материальной точки относительно неподвижной точки 0 – физическая величина, определяемая векторным произведением L r p r mv . L L r p sin , r sin l плечо импульса. p r 0 l α L Lx i Ly j Lz k , Lx r p x , Ly r p y , Lz r p z . r Момент импульса относительно неподвижной оси – скалярная величина, равная проекции на эту ось вектора L относительно произвольной точки данной оси. L r p . L v Для движения по окружности: L R mv . R 2 L Rmvsin v , R Rm v mR . R v R Уравнение моментов dL M. dt Математическая справка: d x y dx y x dy . dt dt dt d dr dp r p p r dt dt dt L v F dL dL v p r F M. dt 0 dt M ,v p sin v , p 0 L M dL Производная по времени от M . момента импульса относительно dt точки равна моменту силы относительно этой точки. Производная по времени от момента импульса относительно оси равна моменту силы относительно этой оси. dLy dLx dLz Mx, My, M z. dt dt dt Закон сохранения момента импульса системы материальных точек При произвольном движении системы n материальных точек: n L Li , i 1 dLi M i внутр M i внеш. dt F 12 n n dLi M i внутр M i внеш .(1) i 1 dt i 1 i 1 n результирующий м ом ент внутренних и внешних сил F r1 - r2 1 2 r1 r2 0 Д ей стви е вн утрен н и х си л своди тся к п ар н ы м в заи м о д ей стви я м 21 M i внутр M внутр , n i 1 M i внеш M внеш. n i 1 M 1 r1 F12 , M 2 r2 F21 , 3 з н. Ньютона : F12 F21. M 2 r2 F12 M 1 M 2 r1 r2 F12 r F12 0, т.к.r F12 , r , F12 0. Результирующий момент внутренних сил в соответствии с третьим законом Ньютона равен нулю. n n dLi M i внутр M i внеш .(1) i 1 dt i 1 i 1 n результирующий м ом ент внутренних и внешних сил В уравнении (1) операции дифференцирования и суммирования n d d L можно поменять местами: Li M внеш. dt i 1 dt Если внешние силы на систему не действуют, то dL М внеш 0 0 L const. dt Момент импульса замкнутой системы величина постоянная, т.е. с течением времени не меняется – закон сохранения момента импульса. Закон сохранения момента импульса является прямым следствием законов Ньютона и изотропности пространства – эквивалентности свойств пространства в различных направлениях. Во многих задачах, связанных с вращающимися системами, угловая скорость вращения ω и момент импульса можно вычислить с помощью закона сохранения момента импульса. Пример: скамья Жуковского, человек на вращающейся скамье держит в руках пару гантелей. R R 1 ω 1 < ω 2 2 Вращается с угловой скоростью ω1. Затем сжимает руки и прижимает гантели к себе: 1 2 . Пусть масса двух гантелей m и R1 таковы, что в первоначальный момент времени момент импульса человека Lч1 равен моменту импульса гантелей Lг1: Lч1= Lг1 (1). Lг1 R1mv1 R1m1 R1 m1 R .(2) 2 1 Начальный момент импульса системы: L1 Lч1 m1 R .(3) 2 1 Т.к. Lч1= Lг1 Lч1 m1 R .(4) 2 1 L2 Lч 2 m2 R .(5) 2 2 Во втором случае: По закону сохранения момента импульса (уравнение (3) равно (5)): Lч 2 m2 R Lч1 m1 R .(6) 2 2 2 1 Lч1 mч1r , (7) 2 Уравнение (7) делим на (8): Lч 2 mч 2 r .(8) Lч1 1 2 Lч 2 Lч1 .(9) Lч 2 2 1 2 Уравнение (9) подставляем в (6): 2 2 2 Lч1 m2 R2 Lч1 m1 R1 .(10) 1 Уравнение (4) подставляем в (10): 2 2 2 m1 R 1 m1 R1 2 R2 , 1 2 1 2 2 2 m1 R 1 m1 R1 2 R2 , 1 2 1 2 R 1R 1R 2 R , 2 1 2 1 2 1 2 2 R 2 R R 21R , 2 21 2 ; 2 R1 R2 2 1 2 2 2 1 2 1 R2 R1 2 21. Аналогичная ситуация возникает, когда фигурист прижимает руки к себе и начинает вращаться быстрее. Гироскоп • Гироскоп – быстро вращающееся симметричное твердое тело, ось вращения которого может изменять свое направление в пространстве. Происходит от греческого гиро скоп наблюдаю кружусь Свойства гироскопа проявляются у вращающихся небесных тел, снаряда (пули), роторов турбин, установленных на судах, волчка, юлы. На свойствах гироскопа основаны различные приборы и устройства, применяемые в технике. Свойства гироскопа проявляются при выполнении двух условий: 1. ось вращения гироскопа должна иметь возможность изменять своё положение в пространстве; 2. частота вращения гироскопа вокруг своей оси должна быть много больше скорости изменения направления оси в пространстве. Для того чтобы ось гироскопа могла свободно поворачиваться в пространстве, его обычно закрепляют на кольцах, так называемая карданова подвеса. Дискообразное тело – гироскоп закреплено на оси аа1 – ось гироскопа, которая может вращаться вокруг перпендикулярной ей горизонтальной оси bb1, которая, в свою очередь, может поворачиваться вокруг вертикальной оси dd1. Все три оси пересекаются в одной точке, называемой центром подвеса. Такой гироскоп имеет 3 степени свободы и может совершать любой поворот около центра подвеса. Силами трения в подшипниках и моментами импульса колец пренебрегаем. Пока гироскоп неподвижен, его можно ориентировать в пространстве любым образом. Если гироскоп начинает вращаться с большой угловой скоростью ω, то при отсутствии внешних сил (Fвнеш =0) М = 0 и т.е. ось гироскопа сохраняет свое положение в пространстве. y F dL L L′ M p z F Если к оси гироскопа y приложить пару сил F, то возникает x вращающий момент М. F y; F z M x Ось гироскопа поворачивается вокруг оси z, а не вокруг х, как это могло показаться. Это гироскопический эффект. y F dL L L′ M p x dL M ; dL Mdt dL M . dt z За время dt гироскоп приращение dL и получит станет L L dL. F Вектор L′ совпадает с направлением оси вращения гироскопа. Если время воздействия мало dt → 0, то даже если момент сил М велик, dL → 0, т.е. кратковременное действие сил не приводит к изменению ориентации оси гироскопа, она будет сохранять определённое направление в пространстве. Гироскоп Применение: - навигационные устройства (гирокомпас, гирогоризонт), - поддержание заданного направления движения (автопилот). При конструировании судов и самолетов необходимо учитывать гироскопические силы, возникающие в подшипниках массивных валов двигателей, роторов турбин, гребных валов и т.п. Динамика вращательного движения абсолютно твёрдого тела относительно неподвижной оси Основное уравнение динамики вращательного движения При вращении абсолютно твёрдого тела вокруг неподвижной оси z каждая отдельная точка движется по окружности постоянного радиуса Ri с некоторой скоростью vi. Моменты силы: z M M xi M y j M z k , ω F R i Mx и My 0 vi Закон сохранения момента импульса: dLz M z. dt Момент импульса относительно точки 0 для i точки твёрдого тела: z ω vi R ai 0 i ri Li ri mi vi ai Ri mi vi . Проекция на ось z Li относительно точки 0: Li ai Ri mi vi z z ai mi vi z Ri mi vi . z ai mi vi z 0 т.к.ai mi vi z. z ai mi vi vi ai z Ri mi vi Ri mi vi vi R i z Li . z Liz Ri mi vi , vi Ri. Liz mi R . 2 i Твёрдое тело – система связанных материальных точек. жёстко Следовательно, для твёрдого тела: n n n i 1 i 1 i 1 Lz Liz mi Ri2 mi Ri2 . J i mi R 2 i - момент инерции материальной точки относительно оси z. n J z mi Ri2 - момент инерции твердого тела i 1 относительно оси z. n Lz Liz - момент импульса (количества i 1 движения) твердого тела относительно оси z. L z J z . dLz M z. Закон сохранения момента импульса: dt d J z d Jz Jz M z. dt dt Т.к. координатную ось z приняли произвольно, индекс можно опустить. M J – основное уравнение динамики вращательного движения. В общем случае: M J – ускорение вращения твердого тела относительно неподвижной оси прямо пропорционально моменту всех внешних сил относительно этой оси и обратно пропорционально моменту инерции твердого тела относительно этой оси. • Физический смысл: Момент инерции относительно оси – мера инерции твердого тела при вращательном движении относительно оси. Момент инерции. Теорема Гюйгенса-Штейнера Момент инерции системы тел – физическая величина равная сумме 2 ri : произведений mi на J mi ri . 2 В случае непрерывного распределения масс сумма сводится к интегралу: J r dm r dV . 2 m 2 V Кольцо J mR . 2 2 Диск, цилиндр mR J . 2 2 l Стержень Шар ml J . 12 2 2 J mR . 5 Теорема Гюйгенса-Штейнера: момент инерции относительно произвольной оси равен моменту инерции относительно параллельной ей оси, проходящей через центр масс J0, сложенному с произведением массы тела на квадрат расстояния между ними а2. J J 0 ma . 2 a l 2 ml l 1 2 J J 0 ma m ml . 12 2 3 2 2 Пример: расчет момента инерции сплошного цилиндра радиуса R, высотой h. dr Разобьем на полые r цилиндры r, r + dr, dr→0. dr r dJ r dm, 2 dm – масса всего полого цилиндра. h dV 2rhdr dm 2rhdr 3 dJ 2hr dr R 1 4 2 J dJ 2h r dr hR , V R h 2 0 R 3 1 4 2 J dJ 2h r dr hR , V R h 2 0 R 3 dr 2 r mR J . 2 h R Закон сохранения момента импульса АТТ относительно неподвижной оси В общем виде dL M. dt В замкнутой системе М 0. dL 0, dt L const. Фундаментальный закон, связан с симметрией пространства, его изотропностью, т.е. физические законы не зависят от выбора направления осей системы координат. Скамья Жуковского. L J const. J 0 2mR 1 J 0 2 const 1 2 . 2 1 R2 0. R R 1 ω 1 < ω 2 2 Кинетическая энергия при вращательном движении АТТ Т.к. имеется АТТ, следовательно, для всех mi ω = const. mi v mi 2 2 J 2 Ек Ri mi Ri . 2 2 2 i 1 i 1 2 i 1 n 2 i n 2 2 n J Динамика вращательного движения. Работа и мощность при вращательном движении относительно неподвижной оси Основное уравнение динамики вращательного движения: M d ; M J .(1) J dt Закон сохранения момента импульса: L J const. Кинетическая энергия при вращательном 2 движении: J Ек 2 .(2) Работа при вращательном движении идёт на увеличение его кинетической энергии: dA dE к .(3) 2 J dA d Jd.(4) 2 Из (1) следует Jd Mdt.(5) Уравнение (5) подставляем в (4): dA Mdt Md.(6) A M .(7) Мощность: dA d N M M .(8) dt dt Плоское движение твердого тела Плоское движение – движение, при котором все участки траектории любых двух точек твёрдого тела лежат в параллельных плоскостях. Кинетическая энергия складывается из энергии поступательного движения и 2 2 энергии вращения. mvc J c Ек , 2 2 vc – скорость центра масс, Jc – момент инерции относительно оси, проходящей через центр масс. Поступательное движение Вращательное движение r m dr v dt p mv dp F dt F a m 2 Ек mv 2 A FS; N Fv J d dt L J dL M dt M J 2 Ек J 2 A M; N M