МЭС`2014 5 - MES conference
реклама

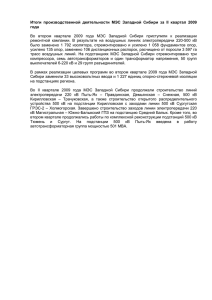
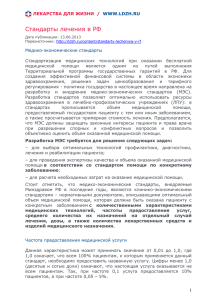
ПРИЛОЖЕНИЕ ПРИНЦИПОВ АДАПТИВНОЙ ФИЛЬТРАЦИИ СИГНА ЛОВ К ЗАДАЧЕ СИНТЕЗА ИНВАРИАНТНЫХ СИСТЕМ УПРАВЛЕНИЯ НЕИЗВЕСТНЫМИ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ Н.В. Гудкова , К.В. Колокол ов а , А .Е. Кульченко ЮЖНЫЙ ФЕДЕРА ЛЬНЫЙ УНИВЕРСИТЕТ ТАГАНРОГ МЭС’2014 1 Предлагается решение задачи управления динамическим объектом с неизвестной математической моделью, базирующийся на принципах прямого и обратного адаптивного моделирования. Для целей управления в исследуемой системе формируются два одновременно протекающих адаптивных процесса – процесс идентификации (прямое моделирование объекта) и процесс формирования управляющего воздействия (обратное моделирование объекта). Прямая и обратная адаптивные модели объекта реализуются в виде трансверсальных фильтров с весовыми коэффициентами, перестраиваемыми по методу наименьшего квадрата. МЭС’2014 2 gk-1 gk gk-2 gk-L Рис. 1. Структурная схема устройства адаптивной обработки сигналов L yk wlk g k l ─ уравнение АТФ l 0 Алгоритм LMS ошибка адаптации k dk yk ─ параметр сходимости, wk 1 wk 2 gk k M E[ g k2 ]( L 1) CKO E[ k ] min 2 ─ условие сходимости LMS 0 M 1─ относительная ошибка адаптации, E[ g k2 ] МЭС’2014 ─ мощность входного сигнала 3 Рис. 2. Схема адаптивной системы управления неизвестным объектом. Значения весовых коэффициентов yk АМ I gk АОМ Копия АМ yмk LMS1 uk ЦАП xk НО LMS2 x АЦП Выход объекта ek zm gk uk u k II -- входной сигнал АОМ; -- управляющее воздействие; xk НО – неизвестный объект; АМ – адаптивная модель; АОМ – адаптивная обратная модель xэk k xk y k -- ошибка идентификации; ek xэk xk -- ошибка управления; -- выходной сигнал объекта yk x эk -- выходной сигнал прямой АМ; y Mk -- выходной сигнал копии АМ, -- эталонный сигнал; xэk g k m МЭС’2014 4 Адаптивная система управления неизвестным объектом Подсистема адаптивной идентификации неизвестного объекта (контур Ι) Дискретное уравнение АМ: L АМ АМ yk wlkAM uk l , wlАМ w 2 uk l k ( k 1) lk l 0 Подсистема адаптивного обратного моделирования неизвестного объекта (контур ΙΙ) Дискретное уравнение АОМ: L yMk wlk g k l , AM l 0 wlkАМ , wlkР μ AM , μ p L uk wlkp g k l , l 0 wlp( k 1) wlkp 2 p y M( k l ) ek -- весовые коэффициенты АМ и АОМ; -- параметр (шаг) сходимости алгоритма МЭС’2014 5 Рис. 3. Процессы в неуправляемом объекте при gk = g0 МЭС’2014 6 Рис. 4. Процессы в адаптивной системе при gk = g0 МЭС’2014 7 Рис. 5. Процессы в неуправляемом объекте при gk = ΩkT МЭС’2014 8 Рис. 6. Процессы в адаптивной системе при gk = ΩkT МЭС’2014 9 Рис.7. Процессы в неуправляемом объекте при gk = Ω(kT)^2 МЭС’2014 10 Рис. 8. Процессы в адаптивной системе при gk = Ω(kT)^2 МЭС’2014 11 Рис. 9. Процессы в неуправляемом объекте при gk = cos(ωkT) МЭС’2014 12 Рис. 10. Процессы в адаптивной системе при gk = cos(ωkT) МЭС’2014 13 Рис. 11. Процессы в адаптивной системе при gk = cos(ωkT) и дрейфе сигнала х(t) = − 0,05 МЭС’2014 14 Заключение • Отличительной особенностью функционирования рассматриваемой сис темы является одновременное выполнение адаптивных процедур прямого и обратного моделирования управляемого объ екта, предназначенных для формирования управляющих воздейс твий в режиме реального времени. • Адаптивные модели объ екта реализуются в виде цифровых адаптивных фильтров с переменными параметрами, для синтеза которых не требуется его математическое описание. • Адаптивная сис тема 1) обладает способнос тью демпфировать собс твенные колебания в объекте; 2) обладает свойс твом минимизировать ус тановившиеся ошибки управления при типовых задающих воздейс твиях, что дает основание отнес ти данную с трукт уру к классу селективно инвариантных сис тем. МЭС’2014 15 Спасибо за внимание! МЭС’2014 16