Совместный спектральный радиус матриц: приложения и методы вычисления. В.Ю.Протасов (МГУ)
реклама
")
В.Ю.Протасов (МГУ)
Совместный спектральный радиус матриц:
приложения и методы вычисления.
A1 , , Am -- линейные операторы в Rd
ˆ ( A1 , , Am ) lim
max
Ad 1 Ad k
1/ k
A2 M
M
k d1 ,..., dk {1,..., m}
Геометрический смысл:
ˆ 1 существует норма
для которой
A1M
в Rd g f
A i 1 при всех i 1, ... , m
Возьмём единичный шар в этой норме:
ˆ 1 существует центрально-симметричное выпуклое тело M R d ,g f
для которого Ai M int M , i 1, ... , m
ˆ inf { 0 | 1 A1 ,
, 1 Am сжатия в некоторой норме}
Геометрический смысл JSR
x
Пусть m 2. Предположим, что семейство A1, A2 неприводимо.
x R dd
произвольная точка ,
Ok ( x) { Ad1
Adk x , d j 1, 2,
max
|u|
A1 x
x 0,
j 1,
A2 x
, k } - орбита точки x.
O1 ( x) , O2 ( x) , O3 ( x) , ...
| u Ok
ˆ k
Приложения:
1960
1988-90
1991
1989-92
Rota, Strang (теория нормированных алгебр)
Барабанов, Козякин (динамическе системы с переключениями)
Daubechies, Lagarias, Cohen, Heil, …. (теория всплесков)
Micchelli, Prautzsch, Dyn, Dahmen, … (уточняющие схемы – теория приближений и
дизайн кривых и поверхностей)
Распределение случайных рядов (теория вероятностей),
Асимптотика бинарной функции разбиения Эйлера (комбинаторика, теория чисел),
Емкость кодов, оценка числа неперекрывающихся слов, теория графов, ....
Основные свойства
m 1. Для одного оператора ˆ (A) = (A) = lim
k
Ak
1/ k
max | j |
j 1,..., d
Если операторы A1 ,... , Am коммутируют, либо их матрицы симметричны,
либо их матрицы -- верхне (нижне) треугольные, то
ˆ ( A1 ,..., Am ) max ( A1 ) ,..., ( Am )
В общем случае, однако ˆ ( A1 ,..., Am ) max ( A1 ) ,..., ( Am )
Всплески с компактным носителем
{ j ,k } j ,kZ полная ортонормированная система (ПОНС) в L2 (R),
j ,k ( x) 2 j / 2 (2 j x k )
Пример 1. Система Хаара (Haar, 1909), ( x)
[0, 1/ 2] [1/ 2, 1]
1, 1
А.Хаар (1909), В.А. Котельников (1933), К.Э.Шеннон (1949),.
1,0
1, 1
1980-90: С.Малла, И.Мейер, И.Добеши, Ч.Чуи, А.Коэн, В.Дамен, и др.
I.Daubechies (1988) – всплески с компактным носителем.
Преимущества всплесков:
Локализация (компактные носители),
Быстрые алгоритмы вычисления коэффициентов,
Характеризация функциональных пространств
..
.
Обработка сигналов
Теория функций, теория приближений
f ( x)
k, j Z
c j,k ( f ,
Диф. Уравнения (Вейвлет-Галёркин метод, и др.)
j,k
c j,k
)
j,k
( x) ,
f ( x)
j,k
( x) d x
Построение всплесков. Масштабирующие уравнения.
Для построения системы всплесков с компактным носителем нужно решить
масштабирующие уравнение (refinement equation)
– разностное функциональное уравнение со сжатием аргумента.
N
c
( x)
k 0
c0 ,
, cN
k
(2 x k ) ,
- последовательность комплексных коэффициентов.
cN (2 x N )
( x)
c0 (2 x)
c1 (2 x 1)
.......
Это – обычное разностное уравнение, но с двоичным сжатием аргумента.
Когда мастабирующая функция найдена, всплеск-функция
явно выписывается:
( x)
N
k 0
(1) k ck 1 (2 x k ),
где c0 , ... , cN - коффициенты масштабирующего уравнения.
Примеры систем всплесков
1. Всплески Хаара (1909)
Масштабирующее уравнение:
( x) (2 x) (2 x 1)
1
1
1
1
0
0
1
1
2. Всплески Шеннона-Котельникова
( x)
sin x
x
( x)
(1933, 1949)
sin 2 x sin x
x
Носитель некомпактен!
3. Всплески Мейера (1986), Всплески Баттла-Лемарье (1987) Носитель некомпактен!
4. Всплески Добеши (1988)
( x)
2
Второй всплеск Добеши. Масштабирующее уравнение:
1 3
3 3
3 3
1 3
(2 x)
(2 x 1)
(2 x 2)
(2 x 3)
4
4
4
4
2
0
3
3
0
Что известно о масштабирующих уравнениях ?
( x)
N
c
k 0
k
(2 x k ) ,
( x) d x
Если есть решение с компактным носителем, и
N
Обратно, если
c
k 0
k
0
N
то
c
k 0
k
2
2 , то есть решение с компактным носителем. Оно единственно
с точностью о домножения на константу и сосредоточено на отрезке [0, N].
( x)
Но только в обобщённых функциях из
S '(R )
0
ˆ ( )
m( / 2) ˆ ( / 2) ,
ˆ ( )
N
1 N
m( )
c k e 2 i k
2 k 0
m (2
j
)
j 1
Масштабирующая функция не бывает бесконечно-гладкой
C N (R)
Примеры масштабирующих уравнений
Примеры 1. c0 c1 1
Тривиально:
( x) (2 x) (2 x 1)
Пример 2.
Пример 3.
c0
c0
0
1
1
, c1 1 , c 2
2
2
1
3
3
1
, c1 , c 2 , c 3
4
4
4
4
0
1
2
0
3
Решение неустойчиво !
Малые изменения коэффициентов могут приводить к резким изменениям решения:
Пример 4.
c0
1
2
1
Tо же с примером c 0
4
c1 1
3
c1
4
c2
1
2
c2
3
4
чисто сингулярно.
c3
1
4
чисто сингулярно.
Cavaretta, Dahmen and Micchelli (1991)
Описание всех масштабирующих сплайнов с целыми узлами.
Lawton, Lee and Sсhen (1995)
Описание всех масштабирующих сплайнов.
Для любого N существует конечное число масштабирующих сплайнов порядка N
Berg and Plonka (2000), Hirn (2008)
Cклассификация всех кусочно-гладких масштабирующих функций.
Теорема (П. 2005). Если существует 0 для которого гладкость
масштабирующей функции на интервале (0, ) превосходит ее
гладкость на R , то -- масштабирующий сплайн с целыми узлами.
Все кусочно-гладкие масштабирующие функции -- сплайны.
Все они – линейные комбинации целых сдвигов B-сплайна.
“ Типичная ” масштабирующая функция и всплеск-функция
Пример 5
( x)
1
2
1
2
(2 x) (2 x 1) (2 x 2) (2 x 3)
3
3
3
3
( x) log 2 3 1.58...
(максимальная гладкость)
( x)
( x) log 2 1.5 0.58...
(минимальная гладкость)
0
sup 0 |
(изломы во всех двоичнорациональных точках)
3
| ( x h) ( x) | C h for all x, h
показатель гладкости (показатель Гельдера)
log 2 1.5 0.58...
Непрерывна, но не дифференцируема
Тем не менее, она дифференцируема почти всюду
( x) sup 0 |
| ( x h) ( x ) | C h
Локальная гладкость в точке x
Почти во всех точках ( x) log 2 2.25 1.17...
Следовательно, '( x) 0 п.в.
Фрактальная природа всплесков. Переменная локальная гладкость.
Как определить, будет ли масштабирующая функция непрерывной ?
I.Daubechies, D.Lagarias, 1991
C (R) ˆ (T0 , T1 ) 1
A.Cavaretta, W.Dahmen, C.Micchelli, 1991
Более того,
log 2 ˆ (T0 , T1 )
C.Heil, D.Strang, 1994
ˆ ( A0 , A1 ) lim
k
1/ k
max
Ad 1
d1 , , dk
Ad k
Пример.
N 4, c0 , c1 , c2 , c3 , c4
c0
c2
T0
c4
T0 , T1 - N N матрицы (2-блочные тёплицевы матрицы),
0
(T ) c
i
jk
2 j k 1i
c1
c
T1 3
0
0
0
0
c1
c3
0
c0
c2
c4
c0
c2
0
c1
c4
0
c3
0
0
0
c1
c3
0
c0
c2
c4
Если только масштабирцующая функция ( x) -- не сплайн,
она имеет переменную локальную гладкость.
( x)
0
Гладкость почти всюду
min log 2 ˆ
0 log 2 0
Минимальная
локальная гладкость
max log 2
Максимальная
локальная гладкость
1/ k
Совместный спектральный радиус
ˆ ( A0 , A1 ) lim
max
Ad 1
Ad k
Нижний спектральный радиус
( A0 , A1 ) lim
min
Ad 1
Ad k
Показатель Ляпунова
k d1 ,..., dk {0,1}
1/ k
k d1 ,..., dk {0,1}
0 ( A0 , A1 ) lim
Ad 1
k
d1 ,...,dk {0,1}
Ad k
1/ k
1/ 2k
Теорема. Для любого x [0,1] имеем ( x) [ min , max ] .
Для каждого [ min , max ] локальная гладкость = ( x) достигается
на всюду плотном множестве точек x [0,1] .
Для почти всех x [0,1] имеем
( x) 0 log 2 0 .
N
Как вычислить или оценить JSR ?
Перебором ( по определению) Daubechies, Lagarias, Heil, Strang,
Эспоненциальная сложность. Heil, Strang (1994) для вычисления JSR специальных 2 2-матриц
с относительной погрешностью = 0.05 перебрали все произведения до длины k 19.
G.Gripenberg (1996) - ``branch and bound'' алгоритм.
Разумный перебор. Часто очень эфективен. Но теоретически плох.
Сходимость к величине JSR при растущем к чрезвычайно медленная.
Причина медленной сходимости:
1/ k
max
d1 ,..., d k {1,..., m}
Ad 1
Ad k
ˆ ,
k
Выбранная норма в R d d может быть слишком далека
от той, в которой все операторы - сжимающие.
C
, где константа C - отношение двух норм.
k
Она может быть очень велика.
Скорость сходимости
Отрицательные результаты о сложности задачи вычисления JSR:
Blondel, Tsitsiclis (1997-2000).
Задача приближённого вычисления JSR для рациональных матриц NP-сложна.
Задача определения: верно ли, что JSR строго меньше 1
(для рациональных неотрицательных матриц) алгоритмически неразрешима,
начиная с размерноти d = 47.
1
Не существует алгоритма, полиномиального по размерности d и по точности
для приближения JSR с относительной погрешностью
Тем не менее, существуют алгоритмы, полиномиальные
1
(по отдельности) по d и по
(увидим).
Инвариантные нормы
Теорема 1 (Н. Барабанов, 1988)
a) Для неприводимого семейства операторов A1 ,..., Am существует 0
и норма
max
, для которой при любом x R d
A 1 x , ... , A m x
= x
b) Для любой такой нормы имеем ˆ ( A1 ,..., Am ).
Независимо был установлен ‘’двойственный’’ факт:
A 2M
Теорема 2 (A.Дранишников, С.Конягин, В.Протасов, 1996)
M
a) Для неприводимого семейства операторов A1 ,..., Am существует 0
A1M
и симметричное выпуклое тело M (инвариантное тело) такое, что
def
A M Conv ( A1 M ,..., Am M ) M
b) Для любого такого тела ˆ ( A1 ,..., Am ).
def
A M Conv ( A1 M ,..., Am M )
Двойственность: M = B* (поляра к B), где B - единичный шар в Барабановской норме
для сопряженных операторов A1* ,..., Am* (F.Wirth, E.Plishke, 2005)
Пример 1. Матрицы де Рама.
0
1 2
A1
A2
(0, 0.5)
;
,
0
1
2
При 0.25 имеем ˆ = (A1 ) max{ 1 2 , }.
1
При 0.25 имеем ˆ = (A1 A2 ) 4 72 .
2
При всех имеем инвариантный шестиугольник М().
Y
M ()
X
Пример 2. 2n 2n матрицы A1 , A2 функции разбиения Эйлера (теория чисел).
Они состоят из 0 и 1.
Для них ˆ
( A0 A1) при нечетных n, и ˆ ( A1 ) при четных n.
Инвариантная норма строится для всех n 13.
Пример 3. Проблема ёмкости двоиных кодов, избегающих данных запрещенных разностей.
Для любого набора запрещённых разностей ёмкость равна JSR двух 0-1 матриц размерности d 2m1.
При малых m инвариантная норма явно строится и находится значение ёмкости.
Алгоритм приближения инвариантной нормы многогранниками
Qk APk
Берем произвольный начальный многогранник P0 R d
(1 )Qk
центрально-симметричный относительно нуля,
последовательность {Pk } определяется индуктивно:
Pk
Qk 1 A Pk Conv ( A1 , A 2 ). Многогранник Pk 1 приближает Qk 1
A1 Pk
Am Pk
Pk 1
с относительной погрешностью : (1 ) Qk 1 Pk 1 Qk 1
и содержит не более N Cd (1 d ) / 2 вершин.
Pk 2
Если положить Pk 1 A Pk , то многогранник Pm может иметь до 2m вершин,
и сложность будет экспоненциальной.
Не нужно хранить все вершины Pm , можно приближать, Pm Qm .
После С0
1
итераций получим нужное приближение
Общее число операций
Для d=2 число операций:
При
0.0001
( diam Pm )1/ m ˆ
C ( d , A0 , A1 ) ( d 1) / 2
C 3/ 2
требуется
106 операций.
Для d =2 алгоритм был запрограммирован И.Шейпаком в 1998.
При d > 2 непонятно как практически реализовывать
Оценка JSR с помощью тензорных произведений матриц
Протасов (1997),
Zhow (1998),
Blondel, Nesterov (2005)
Алгоритм - полиномиальный по размерности d. Даёт грубые оценки на ˆ.
Lp - спектраьный радиус ( p -радиус),
p [1, ]
k
p ( A1 ,..., Am ) lim m Ad 1
k
d1 , , d k
Определен в 1995 независимо: Y.Wang (p = 1),
1/ pm
p
Adm
ˆ
,
R.Q.Jia (для всех p)
p ˆ m1/ p p
Для любого p имеем:
Для целых четных p 2r значение p вычисляется как обычное собственное значение
матрицы
1
A=
m
m
A
k 1
2r
k
2 r ( A1 ,..., Am )
( A)
1/ 2 r
.
Через A B обозначено тензорное (кронекеровское) пр-е матриц A, B - матрица размера d 2
Для любого r имеем:
Матрица Ak
2r
1/ 2r ( A) ˆ m1/ 2r 1/ 2r ( A)
имеет размерность d
2r
1
матрица A =
m
m
A
k 1
2r
k
имеет размерность d 2 r .
Величина 1/ 2 r ( A) даёт приближени JSR с погрешностью m1/ 2 r 1
ln m
2r
1 m 2
(A), где A = Ak приближает ˆ с = 2 1 41%
m k 1
Пример 1. Для двух d d матриц величина
Размерность матрицы A равна d 2 (можно понизить до d 2 / 2 )
Пример 2. Для двух d d матриц величина
4
1 m 4
(A), где A = Ak приближает ˆ с = 4 2 1 19%
m k 1
Размерность матрицы A равна d 4 (можно понизить до
d 4 / 24)
Идея доказательства. p-инвариантные нормы.
N N (R d ) множество всех норм в R d . N выпуклый невырожденный точечный конус.
Для еприводимого семейства матриц A1 , ... , Am и для p [1, +] рассмотрим оператор
1/ p
1 m
F : N N,
F ( | . | )[u ] | Am u | p , u R d
m j 1
Для любой нормы | . | N функционал F ( | . | ) также норма.
F(N)
f
f
1
| A1u | ... | Amu |
m
F ( | . | )[u ] max | A1u | , ... , | Amu |
Примеры. p =1.
p = .
F ( | . | )[u ]
N
При p = 2 оператор F сохраняет евклидовы нормы (единичный шар - эллипсоид).
Теорема. Для неприводимого семейства { A1 , ... , Am } и любого p [1, ] оператор F
имеет ''собственный вектор'': существует норма | . | N и > 0 , для которых
F ( | . | )[u ] | u | ,
u Rd .
Для любой такой нормы ''собственное значение'' равно p ( A1 , ... , Am ).
F(N2r)
f
f
Следствие. При p 2r (r - целое)
F имеет инвариантный конус
1/ 2 r
2r
N 2 r x (a j , x)
существует инвариантная норма f N 2 r ,
j
соответствующая вектору Перрона-Фробениуса оператора F .
На конусе N 2 r
1
оператор F задаётся матрицей A =
m
2 r ( A1 ,..., Am )
( A)
1/ 2 r
.
m
A
k 1
2r
k
N2r
Алгоритм вычисления JSR поиском лучшей нормы
в определенном семействе норм.
Идея: мы не можем найти инвариантную норму. Тогда приблизим её с помощью
норм из определеннго конечномерного класса.
(стандартный трюк в теории приближений)
(V.Blondel, Yu.Nesterov, J.Theys, 2005)
(V.Protasov, R.Jungers, and V.Blondel, 2010)
Рассмотрим сначала случай неотрицательных матриц
Возьмём класс ``прямоугольных'' норм u
rk
x
max
i 1,...,d
ui
,
xi
u >0.
d
x
min
многогранник с mk гранями
x
subject to:
x 0
Ax
rk x 0 ,
Rd
A Ad 1
Теорема. Для любого k имеем
Ad k
d 1/ k rk
1/ k
ˆ rk
1/ k
Случай произвольных матриц
Берём все ``эллипсоидные'' нормы u
X
( Xu, u), где X - положительно-определённая матрица.
Решаем следующую задачу полуопределённого программирования
с одним (матричным) неизвестным X и mk ограничениями.
X
rk
min
subject to:
X
0
AT X A rk X
0 ,
A Ad 1
Ad k
X
Общая задача полуопределённого программирования:
l0 ( X 1 ,..., X q ) min
X 1 ,..., X q
0
ls ( X 1 ,..., X q ) 0 ,
s 1,..., N
Эффективно решается методом внутренней точки. ЛП-задачи – частный случай.
Теорема. Для любого k имеем
d 1/(2 k ) rk
1/(2 k )
ˆ rk
1/(2 k )
Доказать больше иногда легче.
Джордж Пойа «Математика и правдоподобные рассуждения» (1954)
Если не получается что-то доказать, можно попробовать доказать больше.
Если не получается хорошо приблизить JSR, можно попробовать …
вычислить его точно.
Понятие экстремальной нормы
Определение. Норма
.
является экстремальной, если
Aj
ˆ , j 1,..., m .
Для экстремальной нормы сходимость осуществляется в один шаг:
1/ k
max
d1 ,..., d k {1,..., m}
Ad 1
Ad k
ˆ ,
k
Если M - единичный шар экстремальной нормы, то A j M ˆ M ,
A2 M
A1M
M
j 1,..., m.
Как построить экстремальную норму ?
Пусть m =2. Нормируем матрицы так, чтобы ˆ ( A1 , A2 ) 1
v
( x )
x R dd произвольная точка , x 0,
Ok ( x) { Ad1 Adk x , d j 1, 2, j 1, , k }
( x )
{ y R dd ,
x
{k j } jN , xk j Om j ( x) , lim xk j x}
j
A1 x
- множество частичных пределов (точек накопления) орбиты.
Пусть M ( x) Conv (( x), ( x)); тогда ( x) непусто,
dim M ( x) d и
A1 ( x)
A2 ( x)
(свойство самоподобия A1 K
O1 ( x) , O2 ( x) ,O3 ( x) ,
( x)
A2 K
K)
A2 x
, O( x)
Будем строить единичный шар экстремальной нормы в качестве многогранника M .
Оказывается, что такая норма существует для большинства семейств матриц.
Наблюдение 1. Для приводимого семейства задача вычисления JSR сводится к
Нескольким аналогичным задачам в меньших размерностях. Таким образом,
предполагаем, что семейство неприводимо.
Наблюдение 2. Если произведение П максимальное, то его максимальный
собственный вектор v должен быть крайней точкой множества M.
Если M – многогранник, то v -- его вершина.
Итак, максимальные собственные векторы произведения П и всех его циклических
перестановок -- вершины M.
Qv
Наблюдение 3. Критерий остановки:
Лемма. Пусть ( ) = 1 и
v
v* - максимальный
собственный вектор * . Если существует другое
произведение Q, для которого (v*, Qv) > (v*, v),
то - не максимальное.
v
Qv
Алгоритм точного вычисления JSR (Н.Гуглиелми, В.Протасов, 2011)
Берем максимальный собственный вектор v1 of Ad1
Полагаем v j Ad k j2
j 2,
Adk v1 ,
vk
, k.
…..
Ad 2
Ad1
v1
Adk .
Adk
Adk 2
v2
v3
Ad k 1
vs A j v 1
v p Ai v q
‘’Мертвые’’ ветви
Каждый раз проверяем, будет ли новая точка принадлежать выпуклой оболочке
предыдущих точек (ЛП задача).
Алгоритм завершается, когда не появилось ни одной новой вершины.
Инвариантный многогранник M – выпуклая оболочка всех точек, построенных алгоритмом
Для каждой очередной вершины применяем критерий остановки:
Пусть v*j -- максимальный собственный вектор циклической перестановки *j
такой, что (v*j , v j ) = 1, j 1, ..., k. Тогда:
не является максимальным
Для некоторого j {1, ..., m} и некоторой вершины vs имеем |(v*j , vs ) | 1.
*
k
v
v3*
…..
vk
v1
v1*
*
2
v
v2
v3
vs A j v r
v p Ai v q
Для каждой новой вершины vs все произведения | (v*j , vs ) | , j 1, ... , k ,
не должны превосходить 1. Иначе, -- не максимальный
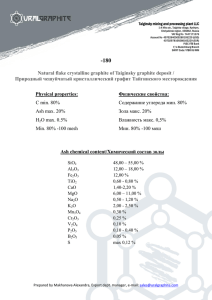
Пример 1. Задача о плотности единиц в ромбе Паскаля:
(S.Finch, P.Sebah, and Z.-Q.Bai, 2008)
Плотность единиц в ромбе Паскаля порядка n -- между C nlog2 ( A1 , A2 ) и
C nlog2 ˆ ( A1 , A2 ) , где
Известно, что ˆ ( A1 , A2 ) = 2.
Относительно ( A1 , A2 ), выдвинута гипотеза, что он равен
1+ 5
= 1.6180...
2
На самом деле,
( A1 , A2 ) A13 A23
(алгоритм работает несколько секунд)
1/ 6
1.6376...
Выбираем A13 A23
Инвариантный многогранник M1 имеет 8 вершин.
Пример 2. Асимптотика бинарной функции разбиения Эйлера.
Бинарная функция разбиения Эйлера bd (k ) -- это количество разложений
k d0 21 d1 22 d2
2m1 dm1 ,
где d j {0,1,
, d 1}
Как мы знаем, b2 (k ) 1. Для d 3 нужно оценить рост bd (k ) при k .
b2 (k )
1
(L.Euler, 1728)
b3 (k ) s(k 1) (Stern, 1858)
b4 (k )
k / 2 1
(Klosinsky, Alexanderson, Hillman, 1984)
Какова асимптотика величины bd (k ) при k ?
L.Euler (1728), A.Tanturri (1918), K.Mahler (1940), N.de Bruijn (1948)
L.Carlitz (1965), D.Knuth (1966), R.Churchhouse (1969), B.Reznick (1990)
Ответ:
b2 r (k ) C k , где log 2 r
(B.Reznick, 1990)
C k 1
b2 r 1 (k ) C k 2 , где
1 log 2 ( A1 , A2 ), 2 log 2 ˆ ( A1 , A2 ) (V.Protasov, 2000)
A1 , A2 это (d 1) (d 1) матрицы из нулей и единиц:
1, если 2 2k j i d 1
( Ai ) j k
0, иначе.
1
0
A1
0
0
1 1 0
1 1 0
1 1 1
0 1 1
Пример. При d = 5 :
1
1
A2
0
0
Алгоритм вычисляет точные значения для d 100.
Оказывается, что для всех d имеем
либо ˆ
( A 1 A2 ) , ( A1 ) , либо:
( A 1 A2 ) , ˆ ( A1 )
Для размерности 50 программа работает 5 минут,
для размерности 100 -- около 20 минут
1 0 0
1 1 0
1 1 0
1 1 1
Функция разбиения Эйлера для троичного разложения:
Выбираем A1 A3
Экстремальный многогранник M3 имеет 16 вершин.
Пример 3. Асимптотика числа слов двоичного алфавита без перекрытий.
Задача сводится к вычислению JSR и LSR двух 20x20-матриц.
2 (Blerk, 1988) , 2.226 (Kobayashi, 1988)
ˆ 2.584 Этот результат последовательно улучшался: 2.226 ˆ 2.584
Kforu (1988), Kobayashi (1988), Cassaigne (1993), Lepisto (1995)
( A1 A210 )
1/11
2.41756...
;
ˆ ( A1 A2 )
Программа работает 8 минут
1/ 2
2.51793...
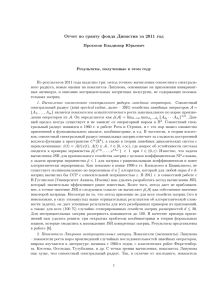
Вычисление JSR для случайных пар матриц
Вычисление JSR и LSR для случайных пар булевских матриц размерности d = 100.
Условия конечной сходимости алгоритма
Определение. Произведение Adk
Ad1 называется доминирующим, если ( )=1,
и существует q 1 такое, что () < q для всех остальных произведений Adn
не являющихся степенями , или степенями его циклических перестановок.
доминирующее
максимальное
Теорема 1. Алгоритм сходится за конечное время тогда и только тогда
когда произведение доминирующее.
Ad1 ,
Спасибо!