УДК 620.179.1.082.7 СЕЛИХОВ А.В., МИШИН В.В., БАРАНОВА Е.Р., ТУЛИН С.Н.
реклама

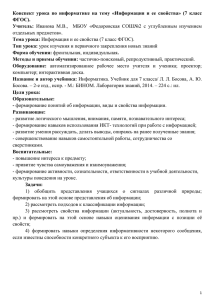
УДК 620.179.1.082.7 СЕЛИХОВ А.В., МИШИН В.В., БАРАНОВА Е.Р., ТУЛИН С.Н. SELIHOV A.V., MISHIN V.V., BARANOVA E.R., TULIN S.N. МЕТОД УМЕНЬШЕНИЯ ВЛИЯНИЯ ТРИБО-ЭДС НА РЕЗУЛЬТАТ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКОГО СОПРОТИВЛЕНИЯ ПОДШИПНИКОВ КАЧЕНИЯ METHOD OF DECREASING TRIBO-EMF INFLUENCE ON THE RESULT OF MEASURING THE BALL BEARINGS' ELECTRICAL RESISTANCE Настоящая статья содержит основные зависимости описывающие принцип преобразователя, описание эксперимента, порядок получения диагностической информации. Ключевые слова: подшипник качения, электрическое сопротивление, трибо-ЭДС. действия This article contains basic functional dependences describing operating principle of transducer, description of the experiment, the procedure for obtaining diagnostic information. Keywords: ball bearing, electrical resistance, tribo-EMF. В настоящее в механических системах широко распространены узлы трения с использованием подшипников качения. Являясь ответственным элементом системы, узлы трения требуют контроля и диагностики. Одним из широко распространенных методов диагностики подшипников качения является электрорезистивный метод. Работа [1] посвящена математическому моделированию сигнала электрического сопротивления подшипника качения, полученные данные позволяют говорить что электрическое сопротивление, как диагностический параметр, позволяет диагностировать подшипник качения. Недостатком электрических методов диагностики, использующих преобразователи сопротивление-напряжение на основе закона Ома является влияние трибо-ЭДС, возникающего в зоне трения на результат измерения. Для снижения влияния данной помехи возможно использование фазового фильтра в качестве преобразователя электрического сопротивления в другой удобный для передачи, хранения и дальнейшей обработки сигнал. На основе данного преобразователя было предложено устройство для диагностики подшипников [2]. Приведем основные зависимости, описывающие принцип действия первичного преобразователя электрического сопротивления в напряжение, экспериментальные исследования работоспособности метода. На рисунке 1 а) представлена электрическая схема фазового фильтра [3], на рисунке 1 б) представлен собранный преобразователь. а) б) а) – электрическая схема, б) – собранный преобразователь Рисунок 1 – Фазовый фильтр Трибо-ЭДС в зоне трибосопряжения играет роль напряжения смещения для выходного сигнала и не влияет на разность фаз между выходным и входным сигналом, вызванную влиянием электрического сопротивления подшипника качения, следователь, используя полосовую фильтрация и выделяя сигнал несущей частоты можно уменьшить влияние трибо-ЭДС. Передаточная функция определяется выражением: 1 j RC A j , 1 j RC R Rп Rд , где Rп – сопротивление подшипника; Rд – дополнительное сопротивление подключаемое последовательно с подшипником для корректировки функции преобразования. 0.6436 RC , 2 f g ф Rп 2arctg RC . Получим функции динамических параметров. Заменяя j на Оператор Лапласа р получим: 1 pRC A p . 1 pRC ФЧХ получается из уравнения: Im A f f arctg Re A f . Получим переходную функцию. Пусть входной величиной является единичный скачок: x t 1 t . Тогда изображение входного сигнала будет иметь вид: 1 x p p. Изображение выходного сигнала y(p) находят из формулы передаточной функции: y p A p x p ; 1 1 pRC p 1 pRC . Выполняя обратное преобразование Лапласа получим оригинал поученного изображения, который является переходной функцией: y p x p A p t CR h t 1 2e (1) (2) (3) (4) (5) (6) (7) (8) . (9) Импульсная функция получается путём дифференцирования переходной функции по времени: t t d 1 2e CR CR 2e g t h t (10) dt CR . Для исследования работоспособности принципа действия преобразователя и отработки метода обработки данных был проведён соответствующий эксперимент. Согласно схеме, изображенной на рисунке 1 а), параметры схемы: Rd=100 Ом, R1=R2=1 кОм, C=15 пФ, частота опорного сигнала f=4 МГц, амплитуда опорного сигнала Uвх=200 мВ, ко входу был подключен резистор 24 Ом, параллельно ему был подключен генератор сигнала с амплитудой 100 мВ, частотой 1 МГц. Так же была получена градуировочная характеристика преобразователя, представленная на рисунке 2. 0 разность фаз, ° -50 -100 -150 -200 -250 1,00E+00 100 1,00E+01 101 1,00E+02 102 1,00E+03 103 1,00E+04 104 1,00E+05 105 1,00E+06 106 R, Ом Рисунок 2 – Градуировочная характеристика Полученные с помощью цифрового осциллографа DSO-2090 сигналы, представлены в табличной форме. В начале выборки центрировались для устранения постоянной составляющей: Uвыхi Uвыхi QUвых , Uвхi Uвхi QUвх , где i – номер элемента выборки, QUвых, QUвх – среднее арифметическое значение. Значение разности фаз определяется с помощью фигур Лиссажу. Так как число точек, полученное при оцифровке мало для достоверного измерения, то проведём интерполяцию, программными средствами, для этого в используемой программе Mathcad есть команда interp(s, y, x, t): функция, аппроксимирующая данные векторов х и у кубическими сплайнами; s — вектор вторых производных, созданный одной из сопутствующих функций cspline, pspline или lspline; х — вектор действительных данных аргумента, элементы которого расположены в порядке возрастания; у — вектор действительных данных значений того же размера; t — значение аргумента, при котором вычисляется интерполирующая функция. Вектор s вычисляется на основе векторов данных функции cspline. Используя полученную функцию, находятся необходимые значения функций. При этом надо учитывать положение большой оси эллипса. Если она находится в первой, третьей четверти, то: a arcsin . b Если во второй, четвертой, то: a arcsin 90 . b На рисунке 3 представлена фигура Лиссажу для сопротивления 24 Ом. 0,25 0,2 0,1 b 0,05 0 a Выходной сигнал, В 0,15 -0,05 -0,1 -0,15 -0,2 -0,25 -0,3 -0,2 -0,1 0 0,1 0,2 0,3 Входной сигнал,В Рисунок 3 – Фигура Лиссажу, для сопротивления 24 Ом Разность фаз составляет 43,5°. На рисунке 4 изображены графики опорного сигнала и выходного без помех, на рисунке 5 – с подключенным генератором для имитации помех. 0,25 напряжение, В 0,2 0,15 0,1 0,05 0 входной сигнал выходной сигнал -0,05 -0,1 -0,15 -0,2 -0,25 0,00 0,50 1,00 1,50 время, мкс Рисунок 4 – Графики сигналов 0,3 напряжение, В 0,2 0,1 0 входной сигнал выходной сигнал -0,1 -0,2 -0,3 0,00 0,50 1,00 1,50 время, мкс Рисунок 5 – Сигнал с помехой На рисунке 6 представлена фигура Лиссажу, соответствующая сигналу с помехой. 0,3 0,2 Выходной сигнал, В 0,1 0 -0,1 -0,2 -0,3 -0,2 -0,1 0 0,1 0,2 Входной сигнал,В Рисунок 6 – Фигура Лиссажу для случая с помехой Вместо использования аппаратного фильтра была использована цифровая фильтрация, с использованием преобразования Фурье. Полученные сигналы были центрированы, чтобы нивелировать постоянную составляющую. Проводя преобразование Фурье был получен спектр выходного сигнала, по нему определён номер гармоники, соответствующий опорному сигналу. Приравняв остальные гармоники нулю и выполнив обратное преобразование Фурье был получен сигнал, с малым влиянием сигнала помех (рисунок 7). Используя полученные данные, была построена фигура Лиссажу, представленная на рисунке 8. 0,15 напряжение, В 0,1 0,05 0 входной сигнал выходной сигнал -0,05 -0,1 -0,15 0,00 0,50 1,00 1,50 время, мкс Рисунок 7– Отфильтрованные сигналы 0,15 Выходной сигнал, В 0,1 0,05 0 -0,05 -0,1 -0,15 -0,15 -0,1 -0,05 0 0,05 0,1 0,15 Входной сигнал,В Рисунок 7 – Фигура Лиссажу для отфильтрованных сигналов Разность фаз составляет 47,285°. Относительная погрешность, по сравнению с сигналом без влияния помех: 47, 285 43,5 100% 8, 7% . 43,5 Данный результат в рамках исследования работоспособности метода является удовлетворительным. Таким образом, использование фазового фильтра в совокупности с фильтром позволяет минимизировать влияние трибо-ЭДС. СПИСОК ЛИТЕРАТУРЫ 1. Селихов, А.В. Разработка обобщенной математической модели подшипника качения [Текст] / А.В. Селихов, А.В. Козюра, С.Г. Пузырев, В.И. Некрасов, Р.В. Шатеев // Фундаментальные и прикладные проблемы техники и технологии. – № 5(301). 2013. – С. 150-158. 2. Пат. Российской Федерации № 141804 G01M13/04 Устройство диагностирования подшипников качения / Селихов А.В., Майоров М.В., Чернышов В.Н., Мишин В.В. — №2013151965/28; заявл. 21.11.2013; опубл. 10.06.2014. 3. Титце, У., Шенк, К. Полупроводниковая схемотехника: справочное руководство. Пер. с нем. – М.: Мир, 1982. – 512 с., ил. Селихов Алексей Владимирович ФГБОУ ВПО «Госуниверситет – УНПК» Лаборант кафедры «ПМиС» Тел. (4862) 41-98-76 E-mail: [email protected] Мишин Владислав Владимирович ФГБОУ ВПО «Госуниверситет – УНПК» к.т.н., профессор кафедры «Приборостроение, метрология и сертификация» Тел. (4862) 41-98-76 E-mail: [email protected] Баранова Евгения Романовна ФГБОУ ВПО «Госуниверситет – УНПК» Студентка кафедры «Экономика и менеджмент» Тел. (4862) 41-95-65 E-mail: [email protected] Тулин С.Н. ФГБОУ ВПО «Госуниверситет – УНПК» Аспирант кафедры «Автопласт» Тел. (4862) 41-98-76 E-mail: [email protected]