Melkomukovx
реклама

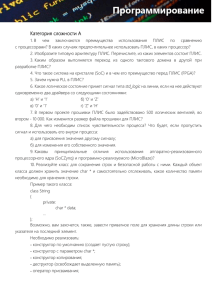
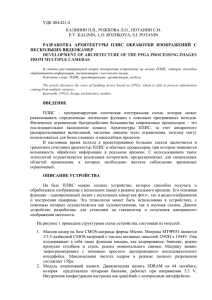
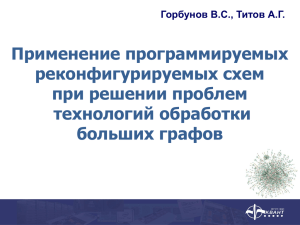
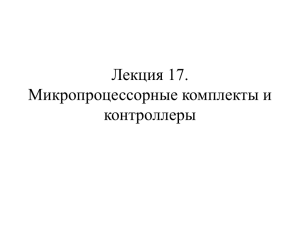
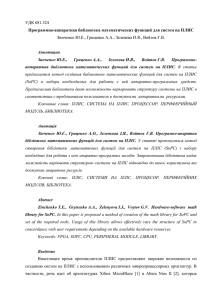
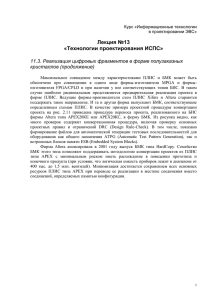
И.Д. Мелкомуков, В.В. Котов Саратовский государственный технический университет имени Гагарина Ю.А. КОНФИГУРАЦИЯ ПЛИС ОТ МИКРОКОНВЕРТОРА В АВТОМАТИЗИРОВАННЫХ СИСТЕМАХ УПРАВЛЕНИЯ Научный руководитель: В.В. Котов, кандидат технических наук, доцент В статье рассмотрен способ конфигурации ПЛИС от микроконвертора для применения в автоматизированных системах управления. Предложенная схема позволяет репрограммировать выполняемые системой управления задачи по многофункциональной цифровой обработке сигналов в реальном времени. In article the way of a configuration PLD from the microconverter for application in the automated control systems is considered. The offered scheme allows to make reprogramme of project carried out by a control system in multipurpose digital processing signals in real time. Современные автоматизированные устройства должны обладать простотой управления, удобством использования, гибкостью и экономичностью. Внедрение микроконтроллеров и микроконверторов, цифровых сигнальных процессоров и программируемых логических интегральных схем (ПЛИС) в системы автоматизированного управления технологическими объектами и процессами наряду с возможностью реконфигурации решаемых задач и расширения функций аппаратуры создает также принципиально новые возможности в построении децентрализованных или распределенных систем управления. При этом децентрализация предполагает не только рассредоточение аппаратуры, но и распределение функций обработки информации и управления между автономными микроконтроллерами. Появляющиеся новые структуры мультипроцессорных систем позволяют решать сложные многомерные расчеты для автоматизированных систем в режиме реального времени. Анализ существующих задач, решаемых микроконтроллерами в автоматических системах, позволяет выделить ряд основных функций, которые необходимо выполнять. Эти функции могут быть разделены на задачи, связанными с приемом и обработкой сигналов аналоговых датчиков. Например, линеаризация характеристик датчика и масштабирование сигналов и т.д. Для реализации этих функций используются упрощённые системы с управлением от одного микроконтроллера или более сложные распределенные системы сбора данных, основанные на цифровом сигнальном процессоре или ПЛИС в совокупности с применением микроконверторов, имеющих интегрированные на одном кристалле аналоговые интерфейсы [1]. Рассмотрим пример спроектированной автоматизированной системы управления (см. рис. 1), включающей в себя блок цифровой обработки сигналов. В схеме применяются микроконвертор ADuC фирмы Analog Devices и ПЛИС фирмы Altera. Обработка сигналов с датчиков системы и их масштабирование подразумевает применение аналого-цифрового преобразования (АЦП). Возникающие в процессе работы АЦП погрешности автоматически корректируются с использованием интегрированных в микроконверторы аппаратных и программных компенсаторов. Обмен данными через аналоговый интерфейс производится по линиям Ai и Ui микроконвертора (DD2). Цифровая обработка высокочастотных аналоговых сигналов Uвч обеспечивается ПЛИС (DD1). Для связи блока обработки с персональным компьютером используется USB интерфейс, в котором использован адаптер (DD3) фирмы FTDI. Рис.1 Автоматизированная система управления с применением ПЛИС При инициализации ПЛИС необходимо загрузить в неё файл конфигурации от компьютера (ПК). Для этого предусмотрена соответствующая подпрограмма в микроконверторе и шина «Config». На рисунке 2 показываются соединения шины «Config» применительно к ПЛИС APEX 20 для выполнения режима конфигурации с одним устройством. Рис.2 Конфигурация ПЛИС Цикл конфигурация состоит из трех этапов: сброса, настройки и инициализации. В то время как сигналы nCONFIG или nSTATUS в состоянии «0», устройство находится в состоянии сброса. При высоком уровне на линии nCONFIG устройство выходит из режима «сброса» и разрешает работу по линии nSTATUS. После этого ПЛИС готова к приему данных и начинается процесс конфигурации. При единичном уровне на линии nSTATUS микропроцессор должен передавать следующий бит данных конфигурации с одновременной синхронизацией этих данных по линии DCLK. Младший бит (LSB) каждого байта данных передается первым. В данном случае ПЛИС синхронизирует свою работу с микроконвертером от внешнего сигнала DCLK. Предусмотрена синхронизация при инициализации нескольких устройств, которая задается посредством соответствующих установок в программной среде разработки проектов для ПЛИС (Quartus II), конкретно, в диалоговом окне параметров контактов ПЛИС. Если возникает ошибка во время инициализации ПЛИС, то это приводит к появлению сигнала nSTATUS с пассивным уровнем, который перезапускает работу ПЛИС. После завершения процесса загрузки конфигурации ПЛИС инициализируется и начинает работать согласно загруженному проекту. Таким образом, применение подобных схем, позволяет изменять алгоритм работы автоматизированной системы путем загрузки посредством микроконвертора разных конфигураций в ПЛИС. При этом можно «на лету» изменять решаемые задачи системой управления и, учитывая высокое быстродействие ПЛИС, выполнять многофункциональную цифровую обработку сигналов в реальном времени. Литература 1. Нарышкин, А.К. Цифровые устройства и микропроцессоры: учеб. / А.К. Нарышкин. М.: Издательский центр «Академия», 2006. - 320 с.