L1-5
реклама

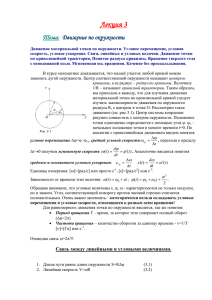
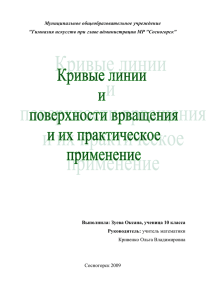
Полное же ускорение вычисляется по формуле a a2 an2 dv / dt 2 v4 / R2 . (1.27) Тот факт, что составляющая ускорения, сонаправленная с вектором скорости, может изменять только величину скорости, а перпендикулярная составляющая – только направление вектора скорости следует непосредственно из определения ускорения ( 1.8 ), откуда v t t v t adt . (1.28) Случаи, изображенные на рис. 1.10, поясняют изменения начальной скорости dt , где конечная скорость v t t v t за промежуток времени получена согласно (1.28), в случае движения с тангенциальным (рис.1.10а, б) и нормальным (рис.1.10в) ускорением. Заметим, что тангенциальное ускорение может только увеличивать или уменьшать длину вектора скорости, а нормальное ускорение может вызвать только его вращение. рис.1.11. Движение с постоянной по модулю скоростью называется равномерным движением. const , a v 0 ). кривизны - R . Так как Понятно, что тангенциальное ускорение при этом равно нулю ( v Прямой линии соответствует бесконечно большой радиус скорость величина ограниченная, то прямолинейному движению соответствует нулевое нормальное ускорение. По величинам тангенциального и нормального ускорения движение материальной точки можно систематизировать следующим образом: а) an 0, a 0 - прямолинейное равномерное движение. Это наиболее простой вид механического движения и происходит без ускорения. an 0, a 0 - прямолинейное неравномерное движение. В частном случае, когда a const , получаем равномерно-ускоренное движение. an 0, a 0 в) - равномерное движение по криволинейной траектории. Если an const , то движение происходит по окружности. Действительно, условие a 0 дает v const , а an const означает, что R const . А кривая с постоянным радиусом кривизны и есть окружность. Так что, случай an const , a 0 соответствует случаю an называется равномерного движения по окружности. В данном случае б) центростремительным ускорением. г) an 0, a 0 . Это случай наиболее общего вида движения. Если имеем неравномерное движение по окружности. R const , то Движение материальной точки по окружности. Введенные кинематические величины характеризуют все виды движения частицы. Несмотря на это, при рассмотрении вращательного движения целесообразно перейти к, так называемым, угловым кинематическим величинам. Их использование удобно тем, что вращательное движение характеризуется постоянной величиной радиуса кривизны. Рис. 1.12. Пусть частица совершает вращательное движение вокруг неподвижной оси ОО 1 (рис. 1.12). Положение частицы на окружности выразим с помощью радиус-вектора r , который представим в виде суммы двух составляющих - параллельной и перпендикулярной оси вращения: r rII r . Во время движения частицы параллельная составляющая (1.29) rII остается неизменным, а r r sin R - величина радиуса окружности. За время dt совершит перемещение dr , благодаря чему вектор r повернется на угол d вращается. Причем, Элементарному углу вращения связь между модулями векторов векторной форме. Действительно, если d r - частица dr r d r sin d . (1.30) d можно приписать r , dr и d можно направление так, чтобы было бы представить в - это вектор, направленный по оси вращения так, что если при взгляде со стороны конца этого вектора вращение частицы происходит в направлении обратном вращению часовой стрелки, то можно написать dr [d , r ] или Здесь было использовано (1.29) с учетом того, что Определенный таким образом вектор d dr dr [d , r ] (1.31) r const , ( dr 0 ). называется угловым перемещением и, в отличие от обычных векторов, которые называются полярными векторами, это аксиальный (осевой) вектор. Аксиальные векторы подчиняются тем же законам сложения и умножения, что и полярные. Между ними есть некоторые различия, но мы не будем сталкиваться с этим в рамках изучения механики. Необходимо помнить, что в векторной форме можно представлять только бесконечно малые углы вращения. Конечные углы вращения нельзя представлять в векторной форме. Это следует хотя бы из того, что при конечном угле вращения вместо (1.30) получается r 2r sin sin / 2 , на основе которого уже невозможно записать связь (1.31). Только когда (1.32) 0 , (1.32) переходит в (1.30) и, следовательно, верно (1.31) Быстрота изменения угла вращения во времени характеризуется вектором угловой скорости d . , dt (1.33) который является аксиальным вектором, направленным по оси вращения. Производная угловой скорости по времени называется угловым ускорением, которая характеризует интенсивность изменения угловой скорости во времени: . .. . В случае вращения вокруг неподвижной оси, вектор (1.34) e направлен вдоль оси вращения. Причем, если вращение ускоряющееся, то совпадает с направлением , если замедляющееся – в обратную сторону. По этой причине во время изучения вращения вокруг неподвижной оси целесообразно пользоваться проекциями векторов d , , и на ось вращения: . . .. , , где и (1.35) - скалярные величины. Очевидно, что закон вращательного движения дается зависимостью t .