А - Fisica
реклама

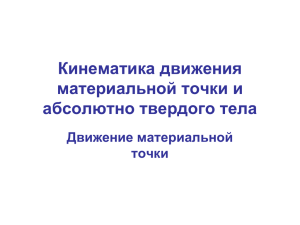
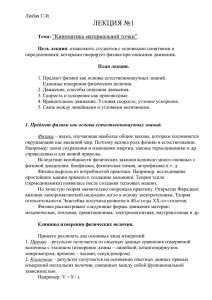
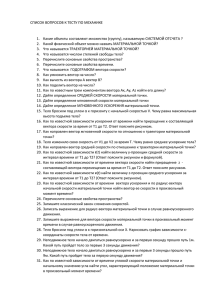
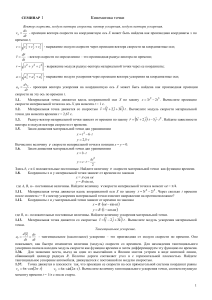
Кинематика поступательного и вращательного движения Основные понятия и формулы. Положение материальной точки в пространстве в данный момент времени задается с использованием м.т. системы координат относительно r k некоторой точки (тела) отсчета, y O Y которая является началом системы j i координат. Направленный отрезок x прямой, соединяющий точку отсчета X О (рис. 1) и материальную точку (м.т.), называется радиус-вектором – r t ; Рис. 1 r t x(t ) i y(t ) j z(t ) k , где x(t ), y (t ), z (t ) – координаты точки в пространстве; i , j , k – единичные векторы направлений (орты соответствующих координатных осей); t – время. Модуль радиус-вектора определяется выражением: r t ( x(t ))2 ( y(t ))2 ( z(t ))2 . При движении материальной точки её координаты и радиус-вектор изменяются со временем, а сама материальная точка (конец вектора r ) описывает в пространстве линию, которая называется её траекторией (рис. 2). Скалярную величину S , равную длине траектории, описанной точкой за данный промежуток времени, называют отрезком пути материальной точки (путём). Путь положителен всегда и в процессе движения может только возрастать. Z Пусть за время t материальная точка переместилась z M ( x, y , z ) из точки М в точку M , пройдя z S r (t ) M ( x , y , z ) вдоль траектории отрезок пути S r (t ) r (t t ) (рис. 2). Вектор r , проведенный y y из начальной точки М в конечную O x точку M , называется вектором Y x перемещения материальной точки X за время t: Рис. 2 r r (t t ) r (t ), или r xi yj zk , где x x x; y y y; z z z. При линейном движении путь S равен модулю вектора перемещения (перемещению) r : Z z S r (x) 2 (y) 2 (z ) 2 при криволинейном движении r S . S где r – вектор средней скорости движения материальной точки перемещение точки за промежуток времени t; r – радиус-вектор точки. Средняя путевая скорость движения S , t где S – путь, пройдённый точкой за промежуток времени t. Мгновенная скорость dr (t ) xi y j z k , dt dx dy dz где x , y , z – проекции вектора скорости на dt dt dt соответствующие оси координат. Модуль вектора полной скорости 2x 2y 2z . Кинематическое уравнение равномерного движения ( const , a 0 ) точки вдоль оси ОХ x x0 t , где x0 – начальная координата точки; t – время движения. Знак «плюс» берется при совпадении направления вектора скорости с выбранным положительным направлением оси ОХ. Правило сложения скоростей в классической механике 0, , где – скорость материальной точки относительно неподвижной системы отсчета; – скорость материальной точки относительно подвижной системы отсчета; 0 – скорость подвижной системы отсчета относительно неподвижной системы отсчёта. Среднее ускорение материальной точки a . t Мгновенное ускорение материальной точки d(t ) a axi a y j az k , dt d y d 2 y d x d 2 x d z d 2 z , ay , az где a x – проекции dt dt dt dt dt dt вектора ускорения a на соответствующие оси координат. Модуль вектора полного ускорения a a a x2 a 2y a z2 . Полное ускорение при криволинейном движении a a an , d где a – тангенциальная (касательная к траектории) dt 2 составляющая ускорения; an – нормальная (центростремительная) R составляющая ускорения, R – радиус кривизны траектории в данной точке. Рис. 3. Модуль вектора полного ускорения при криволинейном движении a a2 an2 . Кинематическое уравнение равнопеременного движения ( a const ) уравнения движения имеют вид: at 2 r r0 0t , 2 где 0 – вектор начальной скорости. Кинематические уравнения равнопеременного движения вдоль оси X иY: a yt 2 axt 2 x x0 0 x t , y y0 0 y t . 2 2 Скорость точки при равнопеременном движении 0 at , где 0 – вектор скорости движения в начальный момент времени t 0 (начальная скорость). Скорость точки при равнопеременном движении вдоль оси X и Y : x 0 x axt , y 0 y a y t. При равноускоренном движении ускорение a берётся со знаком «плюс», при равнозамедленном – со знаком «минус». Связь между ускорением и путем при прямолинейном движении может быть определена выражением 22 12 S . 2a Для тела, брошенного с земли под углом α к горизонту со скоростью 0 (без учета сопротивления воздуха), время полета 2 sin t 0 ; g дальность полета 02 sin 2 S ; g максимальная высота 02 sin 2 hmax . 2g При вращательном движении положение твердого тела определяется углом поворота (угловым перемещением) ( d ) при указанном положении оси вращения. Угловая скорость тела d . dt Модуль угловой скорости равномерного вращательного движения 2 2 , t T где – угол поворота произвольного радиуса от начального положения; t – промежуток времени, за который произошел этот поворот; T N – период вращения; – частота вращения, N – число оборотов за t время t . Угловое ускорение d . dt Кинематическое уравнение равномерного вращения ( const , 0) 0 t , где 0 – угол поворота в момент времени t 0 (в начальный момент времени). Кинематическое уравнение равнопеременного вращательного движения ( const ) t 2 0 0t . 2 Связь угла поворота с числом оборотов: 2N . Угловая скорость тела при равнопеременном вращении 0 t , где 0 – угловая скорость в начальный момент времени t 0 (начальная угловая скорость). При равноускоренном вращении тела угловое ускорение берется со знаком «плюс», при равнозамедленном – со знаком «минус». Величина углового ускорения связано с углом поворота за некоторый промежуток времени соотношением 22 12 . 2 Связь между линейными и угловыми величинами при вращательном движении: Связь между линейными и угловыми величинами выражается формулами: линейный путь, пройденный точкой dS Rd , где d - угловой путь точки; R – радиус вращения точки; линейная скорость точки R , тангенциальное ускорение точки a R , нормальное ускорение точки an 2 R , модуль полного ускорения a a2 an2 2 R 2 4 R 2 R 2 4 .