Механика Кинематика. Динамика. Момент импульса. Динамика
реклама

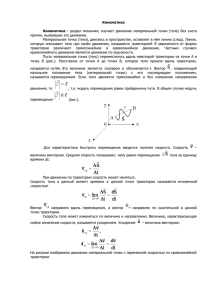
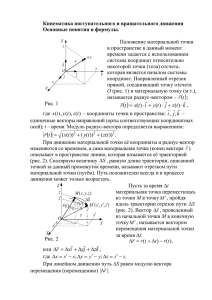
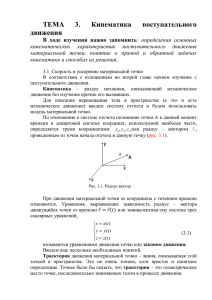
Механика Кинематика. Динамика. Момент импульса. Динамика вращательного движения. Энергия. Релятивистская механика. Элементы механики сплошных сред. Лекция 01 Введение l Глава 1. Кинематика поступательного движения fid Введение en tia § 1. Система отсчета. Траектория материальной точки ......................................................... § 2. Вектора § 3. Скорость.................................................................................................................................. § 4. Ускорение и его составляющие............................................................................................ § 5. Прямолинейное равнопеременное движение § 6. Ускорение при криволинейном движении § 7. Кинематика вращательного движения. Угловая скорость и угловое ускорение on Механика — часть физики, которая изучает простейшую и наиболее общую форму движения материи, заключающуюся в перемещении тел или частей тела относительно друг друга и называемую механическим движением. C Развитие механики как науки начинается с III в. до н. э., когда древнегреческий ученый Архимед сформулировал закон равновесия рычага (на нем основано устройство всех машин) и законы равновесия плавающих тел. Основные законы механики в значительной мере выяснены итальянским физиком и астрономом Галилеем и окончательно сформулированы английским ученым Ньютоном. C om pa ny Механика Галилея — Ньютона называется классической и изучает законы движения макроскопических тел, скорости которых малы по сравнению со скоростью света. Законы движения макроскопических тел со скоростями, сравнимыми со скоростью света, изучаются специальной теорией относительности, сформулированной А.Эйнштейном. Для описания движения микроскопических тел (атомы и элементарные частицы) законы классической механики не применимы — они изучаются квантовой механикой. Механика подразделяется на три раздела: кинематику; динамику; статику. Кинематика изучает движение тел, не рассматривая те причины, которые это движение обусловливают. Динамика изучает законы движения тел и те причины, которые вызывают или изменяют это движение. Статика изучает законы равновесия системы тел. Глава 1. Кинематика поступательного движения § 1. Система отсчета. Траектория материальной точки en tia l Наиболее простым примером механического движения является движение материальной точки. Материальная точка — это тело, обладающее массой, размерами которого в данной задаче можно пренебречь по сравнению со всеми другими размерами встречающимися в поставленной задаче. Движение тел происходит в пространстве и во времени. Поэтому для описания движения материальной точки надо знать, в каких местах пространства эта точка находилась и в какие моменты времени она проходила то или иное место. Положение материальной точки определяется по отношению к какому-либо другому, произвольно выбранному телу, называемому телом отсчета. Выбранное таким образом тело условно считается неподвижным, а связанная с ним произвольная система координат называется системой отсчета положений материальной точки. Z z 0 y Y ny Рис.1 ΔS B C om pa A X C x on A r Z fid В декартовой системе координат положение точки А в данный момент времени по отношению к этой системе характеризуется тремя координатами x, у и z или радиусомвектором r, проведенным из начала отсчета в данную точку (рис. 1). Δr r0 r 0 X Y Рис.2 При движении материальной точки ее координаты с течением времени изменяются. В общем случае ее движение определяется тремя скалярными уравнениями: ìx = x ( t ), ï í y = y ( t ), ïz = z ( t ), î (1.1) эквивалентными векторному уравнению: r = r (t). (1.2) l Число независимых координат, полностью определяющих положение точки в пространстве, называется числом степеней свободы. Если материальная точка движется в пространстве, то, как уже было сказано, она обладает тремя степенями свободы (координаты х, у и z), если по некоторой поверхности, то двумя степенями свободы, если по кривой, то одной степенью свободы. en tia Исключая t в уравнениях (1.1) и (1.2), получим уравнение траектории движения материальной точки. Траектория движения материальной точки — линия, описываемая этой точкой в пространстве. В зависимости от формы траектории движение может быть прямолинейным или криволинейным. C on fid Рассмотрим движение материальной точки вдоль произвольной траектории (рис. 2). Отсчет времени начнем с момента, когда точка находилась в положении А. Длина участка траектории АВ, пройденного материальной точкой с момента начала отсчета времени, называется длиной пути Δs и является скалярной функцией времени: Δs = Δs (t). Вектор Δr = r — r0, проведенный из начального положения движущейся точки в положение ее в данный момент времени, называется перемещением. Естественно, что при прямолинейном движении вектор перемещения совпадает с соответствующим участком траектории и модуль перемещения | Δr | равен пройденному пути Δs. Имеет место два основных вида движения – поступательное и вращательное. Поступательное – это движение при котором любая прямая линия на теле остается параллельной самой себе. При вращательном движении все точки тела движутся по окружностям, центры которых лежат на одной прямой – оси вращения. ny § 2. Вектора C om pa Вектор – это величина, характеризуемая численным значением и направлением и складывается с другими по правилу параллелограмма. Векторы направленные вдоль параллельных прямых называются коллинеарными. Векторы лежащие в параллельных плоскостях называются компланарными. Параллельным переносом, первые могут быть сведены на одну прямую, вторые - на одну плоскость. Два любых вектора всегда компланарны. Единичный вектор e (орт) определяет направление вектора. Умножение вектора на скаляр: b = aa Линейная зависимость между векторами: Проекция вектора на ось l: e =1 al = a cos j d = aa + b b + g c Выражение a вектора через его a = axe x + a y e y + az e z . Здесь ax , a y , az на Векторное произведение: c = nab sin j = a ´ b = [ab] - циклическая перестановка. en tia a[bc] = c[ab] = b[ac] [a[bc]] = b(ac) - c(ab) Двойное векторное произведение: a(t ) = ax (t )e x + a y (t )e y + az (t )e z вектора: r& (t ) = x& (t )e x + y& (t )e y + z&(t )e z fid a& (t ) = a& x (t )e x + a& y (t )e y + a& z (t )e z Дифференциал da = daxe x + da y e y + daz e z радиуса-вектора r(t) векторов: C dr = dxe x + dye y + dze z df = f ¢dt и Df » f ¢Dt , то Da » ny Поскольку движущейся on Для Производная произведения функций: d & ] [ab] = [ab& ] + [ab dt om pa оси: l ab = ab cos j Производная координатные - компоненты вектора. Скалярное произведение: Смешанное произведение: C проекции Производная единичного вектора: da Dt dt точки равна получаем d da dj (ja) = j +a = j a& + j& a dt dt dt и Рассматривается орт ea вектора a . Он единичный и может меняться только по направлению. Пусть он повернулся на угол размеру равно Dea » Dj . Dj Сам за время Dt . вектор Его приращение по приращения равен eΔe - орт вектора Dea . При вращении малого угла Dj этот орт совпадет с перпендикуляром к e a , т. е. станет e ^ . Здесь для en tia l Dea = Dea × eΔe » Dj × e Δe . Искомая производная орта равна dea De Dj dj = lim Dt ®0 a = lim Dt ®0 eΔa = e^ dt Dt Dt dt fid dj e ^ = j&e ^ , где j& dt - угловая скорость вращения вектора on e& a = или Орт e ^ лежит в плоскости, в которой поворачивается вектор сторону поворота. a. a , и направлен в C § 3. Скорость om pa ny Для характеристики движения материальной точки вводится векторная величина — скорость, которая определяет как быстроту движения, так и его направление в данный момент времени. Пусть материальная точка движется по какой-либо криволинейной траектории так, что в момент времени t ей соответствует радиус-вектор r0 (рис. 3). В течение небольшого промежутка времени Δt точка пройдет путь Δs и получит элементарное перемещение Δr. v = Величина Dr Dt (2.1) называется средней скоростью движения за время Δt. Направление средней скорости совпадает с направлением Δr. Если в (2.1) перейти к пределу при Δr → 0, то получим выражение для мгновенной скорости v: v Δs B C A Δr r0 0 Рис. 3 <v> Dr d r = Dr ® 0 Dt dt v = lim Мгновенная скорость v есть векторная величина, равная первой производной радиуса-вектора движущейся точки по времени. Так как секущая в пределе совпадает с касательной, то вектор скорости v направлен по касательной к траектории в сторону движения (рис. 3). По мере уменьшения Δt путь Δs все больше будет приближаться к | Δr |, поэтому Dr | Dr | Ds ds = lim = lim = Dr ®0 Dt Dr ®0 Dt Dr ®0 Dt dt u =| v |= lim значение мгновенной Ds ds = 0 Dt dt u = lim D ® равно (2.2) первой en tia r скорости l Таким образом, числовое производной пути по времени: Движение, при котором скорость, изменяясь как угодно по направлению, остается постоянной по величине, называется равномерным и s = vt . В случае неравномерного движения, когда числовое значение мгновенной скорости с течением времени изменяется, пользуются скалярной величиной < средней скоростью неравномерного движения на данном участке: u > > | <v> |, так как Δs > | Δr | и только в случае прямолинейного движения Δs = | C что < Δr | on Из рис. 3 вытекает, Ds Dt – fid u = u> Если выражение ds = υ dt (см. формулу (2.2)) проинтегрировать по времени в пределах от t до t + Δt, то найдем длину пути, пройденного точкой за время Δt: t + Dt ò u dt ny s= C om pa (2.3) t Путь, пройденный точкой за промежуток времени от t1 до t2, дается интегралом t2 s = ò u( t ) dt t1 Представим вектор скорости в виде: v = vx e x + v y e y + vz e z = ve v , где ev - орт вектора v v = r& = x&e x + y&e y + z&e z . Значит v = x& 2 + y& 2 + z& 2 Орт касательной к траектории обозначим Поскольку или иначе τ , тогда τ = ev и v = ve v = vτ . r = rer , то v = r& = r&er + re& r = v r + vj l en tia v r - характеризует быстроту изменения модуля радиуса-вектора, vj - характеризует быстроту изменения радиуса-вектора по направлению. v = v 2 r + v 2j = r& 2 + r 2j& 2 on Кроме того, dj ej = j&ej , то vj = rj& ej . dt fid e& = Поскольку r § 4. Ускорение и его составляющие ny C В случае неравномерного движения важно знать, как быстро изменяется скорость с течением времени. Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, является ускорение. om pa Пусть вектор v задает скорость точки А в момент времени t. За время Δt движущаяся точка перешла в положение В и приобрела скорость, отличную от v как по модулю, так и направлению, равную v1 = v +Δv. Перенесем вектор v1 в точку А и найдем Δv (рис. 4). vC A Δvτ D Δs E Δvn Средним ускорением неравномерного движения в интервале от t до t + Δt называется векторная величина, равная отношению изменения скорости Δv к интервалу времени Δt: C Δv 0 Рис. 4 B a = v1 Δv Dt Мгновенным ускорением а (ускорением) материальной точки в момент времени t будет предел среднего ускорения: Δv dv = = v& = w Dt ® 0 Dt dt a = lim a = lim Dt ® 0 (3.1) Таким образом, ускорение скорости по времени. Причем a=w есть векторная величина, равная первой производной wx = v&x = && x и т.д. § 5. Прямолинейное равнопеременное движение en tia l При прямолинейном движении вектор скорости все время направлен вдоль одной и той же прямой — траектории, вследствие чего направление вектора w совпадает с направлением вектора v или ему противоположно. Если w совпадает по направлению с v, то скорость растет по величине и движение будет ускоренным. При w, противоположном по направлению v, скорость уменьшается и движение будет замедленным. Прямолинейное движение с постоянным ускорением называется равнопеременным. В зависимости от поведения скорости со временем различают равномерно-ускоренное и равномерно-замедленное движения. v = v + wt fid При равнопеременном движении справедлива формула , 0 причем все входящие в нее векторы v, v0 и w направлены вдоль одной и той же прямой. Спроектировав эти векторы на направление х, совпадающее с направлением вектора v0, получим: on vx = v0 x + wx t (8.1) C Здесь проекции на ось x берутся с учетом знака направления по x. Обычно при рассмотрении прямолинейного движения индексы х в уравнении (8.1) опускают и пишут просто: v = v0 + wt ny (8.2) обращаясь с входящими в уравнение (8.2) величинами как с проекциями векторов. C om pa Интегрируя функцию (8.2) в пределах от нуля до произвольного момента времени t, t + Dt найдем формулу для пройденного пути ( t s = ò (v0 + wt ) dt = v0 t + 0 где w — величина алгебраическая. s= w 2 t 2 , ò u dt ): t (8.3) Однако, эта формула дает правильный результат для пройденного пути только в том случае, если за время t направление движения точки (знак скорости) не изменяется. § 6. Ускорение при криволинейном движении v = ve v = vτ , Если учесть w = v& = d (vτ ) = v&τ + vτ& = wt + w n dt траектории и нормальное ускорение траектории. - направлено по касательной к l wt = v&τ wn = vτ& ускорение en tia Здесь, тангенциальное ускорение то - направлено по нормали к Тангенциальное ускорение – ускорение вдоль траектории определяется быстротой v& τ& радиус R = lim Dj ®0 кривизны Ds ds = Dj dj траектории данной C ny wn = vτ& содержит dj τ& = n dt , нормали к траектории направленный туда, куда поворачивается вектор по кривой. C om pa dj dt Величину точке кривой и центр кривизны – центр окружности, которая сливается с кривой на б.м. ее участке. Нормальное ускорение в on Вводится fid изменения скорости . Нормальное ускорение определяется величиной , т.е. быстротой изменения направления касательной к траектории и следовательно кривизной траектории. свяжем с радиусом кривизны и скоростью по ней. τ где n- орт при движении l en tia fid Ds v¢Dt Dj » = Из рис. следует , где v¢ ¢ ¢ R R dj v Dj v ¢ = при Dt ® 0 . » или точнее ¢ dt R Dt R on средняя скорость. Тогда C В результате получаем v2 wn = n R . ny поворота вектора скорости. Окончательно: вектор ускорения 2 C om pa w = wt + w n = v&τ + при Это ускорение характеризует быстроту движении частицы по траектории v n. R Тангенциальное ускорение обращается в «0» при равномерном движении по окружности, 2 w = wn = тогда v n. R Нормальное ускорение v2 wn = n R обращается в «0» при прямолинейном движении и в точке перегиба траектории. § 7. Кинематика вращательного движения. Угловая скорость и угловое ускорение В случае движения материальной точки по окружности по аналогии с линейными скоростью и ускорением вводятся угловая скорость и угловое ускорение. Пусть точка движется по окружности радиуса R (рис. 6). Ее положение через малый промежуток времени зададим углом Δφ. Δφ Δs Угловой скоростью называется векторная величина, равная первой производной угла поворота тела по времени: Рис. 6 en tia Δj dj = Dt ®0 Dt dt l R ω = lim т. е. υ= ωR. C 0 v R Ds RDj Dj ds = lim = R lim = = Rw Dt ®0 Dt Dt ®0 Dt Dt dt on u = lim Dt ® 0 fid (4.1) Направление вектора угловой скорости задается правилом правого винта: вектор угловой скорости совпадает по направлению с поступательным движением острия винта, головка которого вращается в направлении движения точки по окружности (рис. 7). Размерность угловой скорости [ω] =t-1, а ее единица — радиан в секунду (рад/с). Линейная скорость точки (рис. 6) ω Если ω = const, то вращение равномерное и его можно характеризовать периодом вращения Т — временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2π. Так как промежутку времени Δt = Т соответствует Δφ = 2π, то ω = 2 π /Т. Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения: n = 1/Т= ω /(2π), ω = 2πn. C om pa ny Рис. 7 ω может меняться за счет изменения скорости вращения тела вокруг оси Вектор (изменяется величина ), а также за счет поворота оси вращения в пространстве (изменяется направление ). В связи с этим вводится угловое ускорение. w ω Угловым ускорением называется векторная величина, равная первой производной угловой скорости по времени: ε= dw =β. dt (4.2) Отсюда следует, что вектор углового ускорения направлен по оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор e параллелен вектору w (рис. 8), при замедленном - антипараллелен (рис. 9). dw >0 dt dw <0 dt ω1 ω1 ω2 ε ε Рис. 8 Рис. 9 en tia l 0 ω2 Модули линейной и угловой скоростей связаны формулой υ= ωR. Из рис. Видно, что их v = [ωr] . ny C on fid вектора связаны выражением Нормальная составляющая ускорения C om pa u 2 w 2 R2 wn = an = = = w2R R R Если ввести перпендикулярный к оси вращения вектор R (см. рис.), то w n = -w 2 R . Если считать, что ось вращения тела не поворачивается в пространстве, то модуль тангенциальной составляющей ускорения wt = at = du , u = wR dt и wt = at = d (w R ) dw =R = Re = R b dt dt ### Таким образом, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость υ, тангенциальное ускорение aτ нормальное ускорение аn) и угловыми величинами (угол поворота φ, угловая скорость ω, угловое ускорение ε ) выражается следующими формулами: s = Rφ, υ = Rω, aτ = Rε, an = ω2R C om pa ny C on fid en tia l В случае равнопеременного движения точки по окружности (ε = const) ω = ω0 + εt, φ = ω0t + εt2/2, где ω0 — начальная угловая скорость.