позиционирование исполнительных механизмов с помощью
реклама

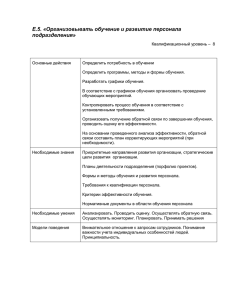
35 http:\\www.hap.ru Для пневматики наиболее характер но цикловое управление исполнитель ным механизмом, при котором тот повто ряет циклы перемещений от начальной точки до конечной и обратно. Остановки при этом происходят, как правило только в начальной и конечной точках. Суще ствуют средства остановки пневматичес ких исполнительных механизмов и в про межуточных положениях, прежде всего в целях безопасности: механические стопо ры, пневмозамки, трехпозиционные пневмораспределители с закрытым цен тром, и.т.п. Однако они не позволяют осу ществить позиционирование – такой тип управления движением исполнитель ного механизма, при котором рабочее звено может останавливаться и удержи ваться в точке с заданной координатой, соответствующей управляющему сигналу. Главная проблема позиционирования в пневматике связана со сжимаемостью воздуха, которая затрудняет дозированное перемещение рабочего звена, пропорци ональное изменению управляющего сиг нала, и его удержание в заданной точке. Решения этой проблемы позволяют пневматике завоевывать новые области применения, успешно конкурируя с гид равликой и электромеханикой. Такими решениями являются, в част ности, пневматические цилиндры с маг нитной шкалой и встроенным тормозом, а также пневматические и электропнев матические позиционеры. CE2 ML2B Пневмоцилиндры с магнитной шкалой и встроенным тормозом Пневмоцилиндры SMC с магнитной шкалой и тормозом (серии CE2, ML2B) позволяют осуществлять дискретное по зиционирование с точностью ±0.5 мм при скорости движения поршня 100 ~ 500 мм/ с. Эта функция выполняется системой, включающей в себя, наряду с цилиндром, программируемый контроллер, получаю щий сигнал обратной связи, и пневмо распределитель, управляемый от контрол лера. Для повышения точности остановок программа контроллера содержит режим самообучения, позволяющий скорректи ровать момент подачи сигнала на тормо жение с целью минимизации перебега. Больше возможностей для позицио нирования дает непрерывное управле ние. Оно осуществляется с помощью по зиционеров – устройств, дополняющих исполнительные механизмы и миними зирующих рассогласование между сиг налами управления и обратной связи. Общим для всех типов позиционеров является наличие аналогового управляю щего сигнала и отрицательной обратной связи. По ряду признаков позиционеры можно разделить на группы: по типу управляемого исполнитель ного механизма – линейные и поворот ные, по характеру управляющего сигнала – пневматические (сигнал 0.2 ~ 1 бар) и электропневматические (сигнал 4 ~ 20 мА), по типу обратной связи – механи ческие и электронные (сигнал от датчика обратной связи поступает на электронный блок управления позиционера). давления управляющего пневматическо го сигнала, поступающего извне, с другой – усилия растянутой пружины обратной связи, противоположный конец которой соединен со штоком пневмоцилиндра. При увеличении входного пневмосигна ла на некоторую величину заслонка сме щается влево (см.рисунок), прижимаясь к торцу сопла. Это приводит к росту проти водавления и, соответственно, управля ющего давления справа от мембраны. Последняя нажимает на торец золотника, смещая его влево, и воздух устремляется в поршневую полость пневмоцилиндра, одновременно стекая из штоковой поло сти. Шток начинает выдвигаться, растя гивая пружину обратной связи. Пружина оттягивает заслонку от сопла, что приво дит к обратному смещению золотника и уменьшению подачи воздуха в поршне вую полость. Наступает момент, когда шток останавливается, при этом его коор дината пропорциональна величине вход ного пневматического сигнала. Принуди тельное смещение штока вызывает че рез пружину изменение баланса сил на заслонке и перераспределение давлений в полостях пневмоцилиндра. На поршне возникает усилие, способствующее воз врату штока в заданное положение. Рассмотрим различные типы позици онеров SMC. Линейный пневматический позици онер IP200 предназначен для пропорцио нального управления перемещением штока пневмоцилиндра. Он состоит из пневмораспределителя, блока управле ния и механизма обратной связи и толь ко не устанавливает шток в заданную точ ку, но и удерживает его в этой точке при изменении внешних условий. Описание работы 5линейный пневмораспределитель содержит притертый стальной золотник, один торец которого поджат пневмопру жиной, а другой упирается в мембрану блока управления. Прогибаясь под дей ствием управляющего давления, мемб рана перемещает золотник, в результате чего перераспределяются потоки воздуха в полости пневмоцилиндра. Управляю щее давление формируется с помощью системы «соплозаслонка». Заслонка за нимает положение, соответствующее ба лансу двух сил: с одной стороны, силы Схема линейного пневматическо го позиционера IP200 информационно технический журнал “Гидравлика и Пневматика” № 31 ПОЗИЦИОНИРОВАНИЕ ИСПОЛНИТЕЛЬНЫХ МЕХАНИЗМОВ С ПОМОЩЬЮ ПНЕВМООБОРУДОВАНИЯ SMC CORPORATION 36 информационно технический журнал “Гидравлика и Пневматика” № 31 Электропневматический позиционер с механической обратной связью IP8000/ IP8100 содержит электромагнит, создаю щий усилие на заслонке, пропорциональ ное управляющему электрическому току 4 ~ 20 мА. C92P – пневмоцилиндр с позицио нером Позиционер IP200 работает в связке с пневмоцилиндрами диаметром 40 ~ 300 мм и длиной хода до 300 мм. Точность позиционирования составляет ±1% от полного хода. Скорость движения порш ня ограничена пропускной способностью позиционера и зависит от диаметра пнев моцилиндра. Так, при диаметре пневмо цилиндра 50 мм шток проходит расстоя ние 100 мм за 1 секунду, а при диаметре 160 мм – за 5 секунд. SMC выпускает готовые сборки, со держащие позиционер IP200, пневмоци линдр C92, C95, CP95, CS1 или CA2, эле менты крепления позиционера и медные соединительные трубки. Пневматический позиционер IP5000/ IP5100 имеет две модификации: первая предназначена для управления линейны ми исполнительными механизмами, вто рая поворотными. Принцип устройства и действия этого позиционера аналогичен IP200: входной пневмосигнал 0.2 ~ 1 бар, система «со плозаслонка», механическая обратная связь. Вместе с тем есть и существенные отличия: клапанный тип пневмораспре делителя, рычажный тип механизма об ратной связи. Обратная связь между ра бочим звеном исполнительного механиз ма и позиционером механическая: при линейном перемещении через рычаг, при поворотном через вал. Точность позиционирования состав ляет ±0.5% от полного диапазона, линей ное перемещение – до 85 мм, угол пово рота – до 100о. Есть исполнения как для низких (30оС), так и для высоких (+100оС) температур. Пневматический позиционер IP5000/5100 http:\\www.hap.ru нивает входной сигнал с сигналом от дат чика обратной связи и выдает соответ ствующие команды на пневмораспреде литель для минимизации рассогласова ния сигналов. Существует модификация позиционера с внешним датчиком обрат ной связи. Для работы в современных автоматических системах управления по зиционер IP8001/IP8101 имеет исполне ние с HARTинтерфейсом. Электропневматический позицио нер IP8000/8100 SMARTпозиционер IP8101 Принцип устройства и действия При увеличении управляющего тока электромагнит создает дополнительное усилие, отводящее сопло от заслонки. Падение противодавления вызывает смещение диафрагмы и втулки пневмо распределителя вправо (см.рисунок), в результате чего открывается клапан по дачи А, и воздух устремляется через вы ход OUT1 в полость пневмоцилиндра. Смещение штока сопровождается пово ротом рычага обратной связи, что приво дит к усилению натяжения пружины и возрастанию силы прижатия заслонки к соплу. Шток останавливается в новом по ложении, соответствующем величине уп равляющего тока. Позиционер имеет исполнение с взрывозащитой вида «искробезопасная цепь», сертифицированное в России, в том числе для температур до 40оС. Сте пень защиты от пыли и влаги IP65. SMARTпозиционер IP8001/IP8101 яв ляется модификацией позиционера IP8000/IP8100. Он также управляется то ком 4 ~ 20 мА, однако механическая об ратная связь заменена датчиком, связан ным с электронным блоком управления. Таким образом, блок управления срав В отличие от исполнительных меха низмов, позиционеры SMC не различа ются по типоразмерам. Поэтому при ис пользовании позиционеров в связке с крупными исполнительными механизма ми могут возникнуть проблемы ограни чений по длине хода и быстродействию. Это требует специальных решений. Увеличение длины хода 1. Поворотный позиционер с шарнир ной тягой Управление пневмоцилиндром с по мощью поворотного электропневматичес кого позиционера IP8100 и шарнирной тяги позволяет осуществлять позициони рование при линейном перемещении более 300 мм и с использованием уп равляющего электрического сигнала 4 ~ 20 мА (напомним, что линейный пози ционер IP200 имеет длину хода не более 300 мм и управляется пневматическим сигналом 0.2 ~ 1 бар). Схема электропневматического позиционера 37 http:\\www.hap.ru Схема управления исполнительным механизмом 2. Поворотный позиционер с клино видным копиром На вал обратной связи позиционера устанавливается эксцентрик, прижатый к краю клиновидного копира, соединенно го со штоком. При движении штока ко пир перемещается, поворачивая эксцен трик и вместе с ним вал позиционера. Формы копира и эксцентрика рассчита ны так, чтобы зависимость координаты штока от управляющего тока была линей ной. Для каждой длины хода пневмоци линдра изготавливается свой копир. нительного механизма применяется уси литель пневматического сигнала EIL100 – устройство, обеспечивающее подачу воз духа при давлении, равном управляюще му, но при расходе существенно большем, чем может пропустить позиционер. Та ким образом, позиционер становится ис точником управляющего пневматическо го сигнала, а в полость исполнительного механизма воздух поступает от основного источника через усилитель EIL100. Уси литель может работать с воздухом, содер жащим распыленное масло, что позво ляет смазывать исполнительный меха низм, не загрязняя воздух, проходящий через позиционер. ры. В целях безопасности в состав систе мы управления может быть включен кла пан блокировки EIL200. При падении ра бочего давления ниже допустимого уровня этот клапан, в зависимости от исполне ния, перекрывает пневмолинию, либо соединяет исполнительный механизм с резервным источником сжатого воздуха для автоматического приведения меха низма в исходное положение. Пневмоцилиндр, управляемый позиционером с копиром 3. Без позиционера, с помощью дат чика обратной связи и программируемо го контроллера Пневмоцилиндр имеет магнитную шкалу, с помощью которой формируется сигнал обратной связи, поступающий в контроллер. Сравнивая входной сигнал с сигналом обратной связи, контроллер выдает дискретные управляющие сигна лы на пневмораспределитель 5/3 с зак рытым центром, добиваясь минимального рассогласования. Эта схема отличается от упомянутой выше схемы управления CE2 и ML2B тем, что движение штока оста навливается не встроенным тормозом, а внешним пневмораспределителем. Повышение быстродействия Пропускная способность позиционе ра имеет предел, поэтому при работе с крупными исполнительными механизма ми, заполнение полостей которых требу ет большого количества воздуха, возни кают ограничения по их быстродействию. Для повышения быстродействия испол Фильтррегулятор EIW200 Усилитель пневматического сигна ла EIL100 В состав пневмооборудования SMC для позиционирования входит ряд вспо могательных элементов, предназначен ных для повышения надежности и безо пасности системы. Воздух, подаваемый на позиционер, должен проходить очистку, прежде всего для обеспечения надежной работы элемента «соплозаслонка», весь ма чувствительного к загрязнениям воз духа. Для этого рекомендуется применять прецизионный фильтррегулятор серии EIW200, обеспечивающий фильтрацию с тонкостью 5 мкм и стабилизацию давле ния. В отличие от обычных устройств та кого типа, фильтррегулятор EIW200 об ладает повышенной устойчивостью к кор розии и механическим воздействиям и имеет исполнения на высокую (до +100оС) и низкую (до 30оС) температу Клапан блокировки EIL200 информационно технический журнал “Гидравлика и Пневматика” № 31 Пневмоцилиндр, управляемый позиционером с шарнирной тягой