идентификация систем на основе вейвлет-анализа
реклама

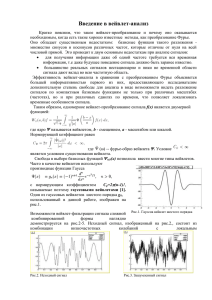
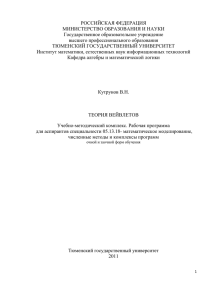
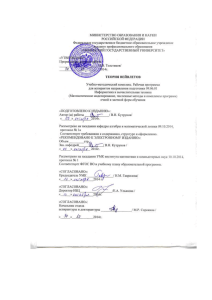
2868 УДК 681.5.015 ИДЕНТИФИКАЦИЯ СИСТЕМ НА ОСНОВЕ ВЕЙВЛЕТ-АНАЛИЗА Е.А. Сакрутина Институт проблем управления им. В.А. Трапезникова РАН Россия, 117997, Москва, Профсоюзная ул., 65 E-mail: [email protected] Н.Н. Бахтадзе Институт проблем управления им. В.А. Трапезникова РАН Россия, 117997, Москва, Профсоюзная ул., 65 E-mail: [email protected] Ключевые слова: вейвлеты, идентификация систем, ассоциативный поиск Аннотация: Идентификационные модели находят широкое применение в современных системах управления, системах поддержки принятия решений, играют основополагающую роль в любой деятельности, связанной с процессом обработки сигналов. Методы, основанные на вейвлет-анализе, характеризуются уникальной способностью детализированного частотного анализа во времени, выбирать «частотно-временные окна». В работе представлены разработанные авторами методы идентификации нелинейных нестационарных систем с использованием кратномасштабного вейвлет-преобразования. 1. Введение При решении задачи идентификации можно выделить широкий класс процессов, для управления которыми не достаточно построения линейных моделей. Кроме того, данные процессы могут иметь некоторые особенности в определенные моменты времени. В технических системах они зачастую имеют циклический характер. Примером причин этого факта может служить различие в составе сырья, поставляемого от различных поставщиков для технологических процессов непрерывного и полунепрерывного производства. Другой пример – сезонные и суточные колебания нагрузки в электрических сетях, что оказывает непосредственное влияние на процесс оптимизации режимов управления передачей электроэнергии. Хорошо известны колебания фондового рынка, обусловленные целым рядом экономических закономерностей. Поэтому актуальным представляется решение задачи построения прогнозирующих моделей для нестационарных процессов такого типа. В течение последних двадцати лет для анализа нестационарных процессов получило широкое применение вейвлет-преобразование (wavelet – «маленькая волна», «ondelette»), о чем свидетельствуют многочисленные публикации [1]. В отечественной литературе ее иногда называют «всплеском», подчеркивая осцилляционный характер. Вейвлет-преобразование сигналов является обобщением спектрального анализа, например, по отношению к преобразованию Фурье. Первые работы по вейвлет-анализу временных (пространственных) рядов с выраженной неоднородностью появились в середине 1980-х годов [2]. Метод был позиционирован как альтернатива преобразованию Фурье, локализующему частоты, но не XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2869 дающему временного разрешения процесса. В дальнейшем появилась и развивается теория вейвлетов и ее многочисленные приложения. Сегодня вейвлет-анализ используется для обработки и синтеза нестационарных сигналов, для решения задач сжатия и кодирования информации, обработки изображений, в теории и практике распознавания образов, в частности, в медицине, и во многих других сферах. Эффективной оказалась практика применения вейвлетов для исследования геофизических полей, временных метеорологических рядов, прогнозирования землетрясений. Подход эффективен для исследования функций и сигналов, нестационарных во времени или неоднородных в пространстве, когда результаты анализа должны содержать не только частотную характеристику сигнала (распределение энергии сигнала по частотным составляющим), но и сведения о локальных координатах, на которых проявляют себя те или иные группы частотных составляющих, или на которых происходят быстрые изменения частотных составляющих сигнала. Вейвлет-анализ основан на применении специального линейного преобразования процессов для изучения интерпретируемых этими процессами реальных данных, характеризующих процессы и физические свойства реальных объектов, в частности, технологических процессов. Такое линейное преобразование осуществляется на основе специальных солитоноподобных функций (вейвлетов), образующих ортонормированный базис в . Вейвлет-преобразование (ВП) одномерного сигнала – это его представление в виде обобщенного ряда или интеграла Фурье по системе базисных функций. Метод основан на фундаментальной концепции представления произвольных функций на основе сдвигов и расширений одной локализованной небольшой волны или вейвлет-функции, которая быстро затухает по направлению к нулю. Вейвлет формируется таким образом, что образующая его функция (вейвлетообразующая функция, или материнский вейвлет) характеризуется определенным масштабом (частотой) и локализацией во времени за счет операций сдвига во времени и изменения временного масштаба. Временной масштаб аналогичен периоду осцилляций, т.е. обратен частоте, а сдвиг интерпретирует смещение сигнала по оси времени. Вейвлет-преобразование ставит в соответствие одномерному процессу двумерную поверхность в трехмерном пространстве (частота и время полагаются независимыми переменными). Таким образом, свойства процесса исследуются как во временной, так и в частотной областях, предоставляя возможность исследовать динамику частотного состава процесса и его локальные особенности. Это позволяет выявлять координаты, при которых определенные частоты проявляются наиболее существенно. Графическая интерпретация вейвлет-преобразования может быть осуществлена посредством проектирования на плоскость и выделения изоуровней, характеризующих изменения интенсивностей коэффициентов вейвлет-преобразования при разных временных масштабах, а также получить расположение локальных экстремумов поверхностей. В отличие от аппарата преобразования Фурье, когда используется функция, порождающая ортонормированный базис пространства посредством масштабного преобразования, вейвлет-преобразование формируется на основе базисной функции, локализованной в некоторой ограниченной области и принадлежащей пространству, т.е. всей числовой оси. По сравнению с «оконным» преобразованием Фурье, для получения преобразования на одной частоте уже не требуется вся временная информация. Преобразование Фурье не дает представления о локальных свойствах сигнала при достаточно быстрых изменениях во времени его спектрального состава. Таким образом вейвлетанализ может обеспечить частотно-временной информацией о функции, которая во многих практических ситуациях является более актуальной, чем информация полученная с помощью стандартного Фурье-анализа. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2870 Вейвлеты также обеспечивают мощный инструмент аппроксимации, который может быть использован для синтеза функций, которые плохо аппроксимируются другими методами, с минимальным количеством базисных функций. Вейвлет-преобразование как математический инструмент служит, главным образом, для анализа данных во временной и частотной областях. Теория вейвлетов может быть использована для идентификации систем в разных аспектах. Исследование взаимодействия теории идентификации и вейвлет-анализа было в некоторой степени представлено в [3, 4]. Отмечено, что вейвлеты используются преимущественно для идентификации нелинейных систем с особенной структурой, где неизвестные изменяющиеся во времени коэффициенты могут быть представлены как линейная комбинация базисных вейвлет-функций [5, 6]. Такой подход получает развитие на основе использования кратномасштабного анализа [7], в котором собственно задача выбора вейвлетов решена. Другой подход использует базисные функции вейвлета в качестве входов системы. Далее, на основе анализа выхода системы, находят необходимые коэффициенты [8]. Кроме того, характеристики вейвлетов могут быть использованы для собственных частот и частот затухания системы [9, 10], путем использования гребней в вейвлетаппроксимации системы в пространстве вход-выход. Кроме непосредственного вейвлет-анализа, для идентификации систем могут быть использованы биортогональные вейвлеты [11], вейвлет-фреймы [12] или даже вейвлетсети [13]. Существует много различных способов применения теории вейвлетов для идентификации линейных систем. Прейсиг и Риппин [14-17] исследовали идентификацию систем со специфической входо-выходной структурой, в которой параметры идентифицируются через сплайн-вейвлеты и их производные. В работе [18] представлен расширенный посредством ортонормированного преобразования метод наименьших квадратов с целью извлечения полезной информации из данных. u вход ПФ y Система a Модель АИ Генератор сигналов вход b y u Система ПФ АИ Модель Генератор сигналов y u вход c Система Генератор сигналов АЧХ ВФ АИ Модель Рис. 1. Основные принципы предлагаемых алгоритмов; (a, b) показывают классические методы идентификации в частотной области, (c) является модификацией согласно текущей статье. ПФ – преобразование Фурье, АИ – алгоритм идентификации, АЧХ – анализ частотных характеристик, ВФ – вейвлет-фильтр. Настоящая статья посвящена анализу возможностей совместного использования теории вейвлетов [19] и теории идентификации систем [20]. Специфика подхода, представленного в настоящей работе, проиллюстрирована на рис. 1. Классический подход к идентификации систем в частотной области состоит в том, что необходимо сначала отфильтровать входные данные, подать отфильтрованные входы в систему, а затем проXII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2871 вести идентификацию (см. рис. 1(a)). Этот подход имеет существенную ограниченность – необходима априорная информация о свойствах частот системы, чтобы выявлять важные частоты при построении фильтра. Кроме того, если какая-либо резонансная частота не выявлена, то отклик модели не будет ее содержать, и, соответственно, может быть утеряно важное свойство исходной системы. Проблема может быть решена путем использования фильтрации после подачи входов в систему (см рис.1(b)). Другой подход может заключаться в осуществлении вейвлет-фильтрации и частотного анализа неотфильтрованных входных и выходных сигналов. Однако чтобы сохранить временную структуру задачи идентификации систем, невозможно разделить вейвлетпреобразование и идентификацию. Таким образом, и частотный анализ и вейвлетпреобразование должны быть включены в алгоритм идентификации, как показано на рис. 1(c). Разделы 2 и 3 настоящей статьи содержат необходимую для дальнейшего изложения справочную информацию о вейвлет-анализе, а последующие разделы посвящены анализу алгоритмов идентификации на основе вейвлетов. 2. Вейвлеты и их основные характеристики С использованием вейвлетов можно приближать сложный сигнал с очень высокой точностью. Вследствие выделения локальных особенностей у исследуемого процесса, отсутствующих у рядов Фурье, и достаточного разнообразия, вейвлеты все чаще находят практическое применение для анализа отличительных особенностей сложных сигналов. Базисные функции данного преобразования занимают промежуточное положение между крайними случаями – гармоническими и импульсными функциями [21]. При формировании вейвлет-преобразований в общем случае применяются две непрерывные, взаимозависимые и интегрируемые по независимой переменной функции: Вейвлет-функция с нулевым значением интеграла и частотным Фурье-образом Ψ , характер которой отражает локальные особенности сигнала. Масштабирующая функция (так называемая скейлинг-функция) с единичным значением интеграла, с помощью которой осуществляется грубое приближение (аппроксимация) сигнала. Скейлинг-функции определяются только для ортогональных вейвлетов. Их целесообразно использовать для анализа низкочастотных и высокочастотных составляющих. Непрерывное вейвлет-преобразование (НВП) формируется с помощью непрерывных масштабных преобразований и переносов вейвлета с произвольными значениями масштабного коэффициента a и параметра сдвига b: | | , ⁄ ∗ (здесь* – символ комплексного сопряжения). Можно показать [21], что для функций преобразование 1 , , из существует обратное вейвлет, – нормирующий коэффициент, определяемый по формуле: XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2872 |Ψ | |ω| ∞, где Ψ – фурье-преобразование вейвлета . Для ортонормированных вейвлетов 1. Таким образом, любая функция из может быть представлена в виде суперпозиции масштабных преобразований и сдвигов базисного вейвлета с коэффициентами, зависящими от масштаба (частоты) и параметра сдвига (времени). порожает ограничения на класс функций, которые можно Условие конечности использовать в качестве вейвлетов. В частности, при 0 для сходимости интеграла в нуле значение (t ) должно быть равно нулю. Это обеспечивает условие компактности – средней частоты фурье-образа вейвлета с локализацией вокруг некоторой частоты вейвлетной функции. Для этого функция должна иметь нулевое среднее значение: 0. Следовательно, что не для всех сигналов возможна их точное воспроизведение посредством вейвлета , т.к. при нулевом первом моменте вейвлета коэффициент передачи постоянной составляющей сигнала в обратном вейвлет-преобразовании равен нулю. Условия точной реконструкции сигналов определяются кратномасштабным анализом. Функция , определяет значимость компонент разного масштаба во времени и называется спектром коэффициентов вейвлет-преобразования сигнала . По аналогии с преобразованием Фурье можно определить полную энергию сигнала: , , а также глобальный спектр энергии – распределение полной энергии по масштабам (скейлограмму вейвлет-преобразования) , . Базисные функции , формирующие вейвлеты (эти функции выбираются в соответствии со спецификой задач), должны удовлетворять следующим условиям [22]. Локализация: вейвлет должен быть локализован вблизи нуля аргумента как во временной, так и в частотной области. Например, дельта-функция и гармоническая функция не удовлетворяют этому условию. Нулевое среднее: 0, что означает знакопеременность (осцилляцию) графика исходной функции вокруг нуля на оси времени и он должен иметь нулевую площадь 0 – равенство нулю первых моментов. Такие вейвлеты называют вейвлетами -го порядка. Соответствующее вейвлетпреобразование позволяет более детально анализировать высокочастотную составляющую процесса. Это может быть полезным для анализа процессов, характеризующихся резкими важными для анализа «пиками» (например, процессы трейдинга). Автомодельность, или самоподобие вейвлет-преобразования. Все вейвлеты конкретного семейства имеют то же число осцилляций, что и материнский XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2873 вейвлет , поскольку получены из него посредством масштабных преобразований ( ) и сдвига ( ). | | Ограниченность: ∞. Вейвлет должен быть достаточно быстро убывающей функцией временной (пространственной) переменной. Определения и свойства одномерного непрерывного вейвлет-преобразования обобщаются на многомерный и на дискретный случаи. Примеры наиболее известных вейвлетов [23]: 1) Вещественные непрерывные базисы: 1.1) Гауссовы: ⁄ 1-го порядка, или WAVE-вейвлет 2-го порядка, или MHAT-вейвлет «Мексиканская шляпа» – ⁄ Mexican hat: 1 n -го порядка: 1 ⁄ ⁄ ⁄ 1.2) DOG – difference of Gaussians: 0,5 1.3) LP-Littlewood & Paley: sin 2 sin 2) Вещественные дискретные: 1, 0 1⁄2 2.1) HAAR-вейвлет: 1, 1⁄2 1 0, 0, 1 2.2) FHAT («Французская шляпа» – French hat): | | 1⁄ 3 1, 1⁄2 , 1⁄3 | | 1 0, | | 1 3) Комплексные: ⁄ Морле (Morlet): Пауля (Paul) (чем больше , тем больше нулевых моментов имеет вейвлет): Г 1 Помимо вейвлетов, описываемых аналитически в явном виде, известно значительное множество вейвлетов, определяемых итерационными выражениями, начиная с хорошо известных функций Добеши (Daubechies) [24]. Значительное количество типов материнских вейвлетов и их вариаций представлено Mathcad, Mathematica, Wavelet Toolbox 2.0/2.1 (MATLAB) и других специализированных приложениях. За счет выбора определенных вейвлетов можно более полно выявить характерные нестационарные области анализируемого процесса. Однако некоторые свойства вейвлет-преобразования процессов (сигналов) не зависят от выбора материнских вейвлетов. К таким свойствам относятся следующие. 1) Линейность. Это свойство непосредственно вытекает из соответствующего свойства скалярного произведения: , , . 2) Инвариантность относительно сдвига. Смещение сигнала во временной области на обусловливает сдвиг вейвлет-образа также на : , . 3) Инвариантность относительно масштабирования. Растяжение (сжатие) сигнала влечет за собой его растяжение (сжатие) его в области , : XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2874 ⁄ 1 , . 4) Дифференцируемость 1 . Свойство дифференцируемости предоставляет возможность детализированного анализа особенностей высокого порядка или мелко-масштабных вариаций сигнала дифференцированием нужное число раз либо вейвлета, либо самого сигнала. При выделении в сигналах хорошо локализованных разномасштабных процессов можно рассматривать только те масштабные уровни разложения, которые представляют интерес. Использование базисных вейвлет-функций обеспечивает качественное представление сигналов с локальными скачками, разрывами и т.д. Большинство вейвлетов не имеют аналитического выражения и могут рассчитываться с помощью итерационных выражений. В совокупности с достаточным вычислительным объемом проведения преобразования это часто заставляет использовать самые простые вейвлеты для анализа и синтеза сигналов. Наиболее часто используется вейвлет Хаара. Базис Хаара известен с 1910 г. и широко используется в преобразованиях, – например, на его основе разработан стандарт кодирования изображений со сжатием JPEG2000 [25]. Теория вейвлетов предоставляет эффективную технику обработки случайных последовательностей [26-28]. Одна из основополагающих идей вейвлет-представления сигнала заключается в разбивке приближения к сигналу на две составляющие – грубую (аппроксимирующую) и утонченную (детализирующую) , с последующим их уточнением итерационным методом: (1) , ∈ , , , , ∈ где характеризует уровень разрешения; , – соответственно масшта, , бирующая (аппроксимирующая) и вейвлет-функция (детализирующая функция); – наборы аппроксимирующих и детализирующих коэффи, , , циентов разложения 1 уровня разрешения; … , 1,0,1, … – множество целых чисел. Аппроксимирующие функции – множество целых чисел. Аппроксимирующие функции присущи далеко не всем вейвлетам, а только тем, которые относятся к ортогональным. Приближению (1) соответствует начальный набор коэффициентов выбирается массив значений сигнала , , . Обычно в качестве , . , Повторяя процедуру раз, 1, , разлагая каждый раз сглаженную функцию на еще более сглаженную часть и детализирующую часть , получаем вейвлет-разложение аппроксимации m-го уровня разрешения для глубины разложения : ⋯ , (2) XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2875 , (3) , , ∈ , ⋯ ∈ , , ∈ Вейвлет-разложение (2)-(3) можно изобразить в виде следующей схемы нахождения коэффициентов: → , , , , , ,…, → →⋯→ . (4) Практическая обработка и представление реальных сигналов обычно базируются на трактовке вейвлет-преобразований в частотной области и позволяют успешно использовать аппарат частотной фильтрации и методы быстрого вейвлет-преобразования. Они основаны на пирамидоидальном алгоритме Малла и прореживании спектра вейвлетов по частоте. Главным результатом является вывод о соответствии вейвлеткоэффициентов коэффициентам передаточной характеристики низкочастотного и высокочастотного фильтров, что позволяет организовать эффективные, с точки зрения объема вычислений, процедуры вычисления коэффициентов вейвлетов. Входная последовательность не является стационарной. В общем случае разложение сигнала может быть представлено следующим образом: (5) , , , , где – глубина кратномасштабного разложения, , – масштабирующие (аппроксимирующие) коэффициенты, , – масштабирующая функция, , – детализирующие коэффициенты, , – вейвлет-функция. 3. Дискретное вейвлет-преобразование и кратномасштабный вейвлет-анализ Дискретный временной базис функций используется для анализа дискретных временных сигналов. Вейвлет преобразование является одним из многих методов анализов сигнала. Сигнал анализируется подобно преобразованию Фурье [29-32]. Основное преимущество вейвлет-преобразования заключается в том, что оно дает анализ сигнала в обоих областях временной и частотной. Для дискретного одномерного вейвлет-преобразования (ДВП) базис строится по аналогии с частотой синусоиды. В частности, можно принять в качестве значений частоты степени двойки (т.н. диадное преобразование). В этом случае базисные функции будут иметь вид: 2⁄ 2 . Базис нормирован, если вейвлет имеет единичную норму. Семейство представляет собой ортонормированный базис функционального пространства [22]. Поэтому любая функция из может быть представлена в ⁄ ∑, 2 виде ряда , где 2 . Для диадного преобразования разработан быстрый алгоритм вычислений, аналогичный быстрому преобразованию Фурье. В более общем случае для дискретного вейвлет-преобразования может быть применена дискретизация непрерывного вейвлет-преобразования, в которой используются дискретизированные значения параметров ( , ) вейвлетов с произвольным шагом ∆ и XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2876 ∆ . В результате может быть получено избыточное количество коэффициентов, существенно превышающее число отсчетов исходного сигнала, которое не требуется для реконструкции сигналов. В ряде процедур дискретные значения параметров и задаются в виде степенных функций: , , 1, , ∈ , где – пространство целых чисел ∞, ∞ , – параметр масштаба, – параметр сдвига. будет формироваться по формулам: Тогда базис пространства ⁄ | | , , ∈ , ∈ . Вейвлет-коэффициенты прямого преобразования вычисляются по формуле: . Обратное дискретное преобразование для непрерывных сигналов при нормированном ортогональном вейвлетном базисе пространства вычисляется следующим образом: . В приложениях, как правило, используется конечный фрагмент ряда. При этом количество использованных вейвлетов (значение масштабного коэффициента ) задает уровень декомпозиции сигнала. В качестве нулевого уровня принимается уровень максимального временного разрешения сигнала, т.е. сам сигнал, а последующие уровни ( 0) образуют ниспадающее вейвлет-дерево. Примеры дискретных вейвлетов: 1, 0 1⁄2 HAAR: 1, 1⁄2 1 0, 0, 1 | | 1⁄3 1, 1⁄2 , 1⁄ 3 | | 1 FHAT («Французская шляпа» – French hat): 0, | | 1 Как и для непрерывного вейвлет-преобразования, обратное дискретное преобразование не может осуществить точную реконструкцию нецентрированных сигналов в силу нулевого первого момента вейвлетных функций и, соответственно, центрирования значения вейвлет-коэффициентов при прямом вейвлет-преобразовании. Поэтому дискретные вейвлеты используются, как правило, в паре со связанными с ними дискретными скейлинг-функциями, первый момент которых по области определения равен 1. Скейлинг-функции образуют дополнительный базис пространства . Совокупность вейвлет-коэффициентов и скейлинг-коэффициентов разложения сигналов предоставляет возможность осуществить точную реконструкцию сигналов. 3.1. Свойства операторов Пусть обозначает Гильбертово пространство со скалярным произведением ∙,∙ . Пусть будет некоторым закрытым подпространством ⊂ и пусть ∈ |⟨ , ⟩ 0, ∀ ∈ будет ортогональным дополнением. Мы можем написать ⨁ . Всякое Гильбертово пространство имеет ортонормированный XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2877 базис. Если этот ортонормированный базис счетный, то Гильбертово пространство сепарабельное [33]. Далее, пусть периодическое расширение 0 , 1 ,…, 1 ∈ определяется как , ∀ ∈ . Более того, вводятся некоторые добавочные операторы. Оператор переноса : → определяется как , ∀ ∈ . Сопряженный рефлексивный оператор определяется как ̃ ,∀ ∈ . Оператор понижения дискретизации → определяется как 2 для 0, … , 1, 2 и : оператор повышения дискретизации : → определяется как для четных и 0 для нечетных . Эти операторы обладают следующими свойствами: (9) , 1 2 (10) ° , . где ° 1 ∗ обозначает хорошо известный оператор свертки векторов и . Стоит также отметить некоторые из основных свойств, необходимых для описания дискретных вейвлетов: ⟨ , ⟩ (11) ∗ ∗ (12) ⟨ , ⟩ И, наконец, мы будем использовать стандартное (дискретное) обозначение преобразования Фурье, т.е. (13) ̂ ∙ Кроме того в статье, теория строится в пространстве. 3.2. Кратномасштабный вейвлет анализ сигналов Главная идея дискретного вейвлет-преобразования заключается в разложении исходного Гильбертова пространства на два подпространства, пространство аппроксимаций и пространство детализаций . Это анализ первого уровня. Далее пространство аппроксимации закрывается и имеет счетный базис, это сепарабельное Гильбертово пространство и может быть разложено позднее. Анализ на j-ом уровне ( ∈ ) обозначают пространство аппроксимапроисходит по следующей схеме. Пусть и ций j-го уровня и пространство детализации на j-ого уровня соответственно. Тогда запишем: ⨁ ⨁ … ⨁ или в более компактной форме: ⨁ ⨁ (14) ⨁⋯⨁ . После разложения на каждом уровне оба пространства имеют одинаковую размерность, т.е. и имеют размерность . Поэтому должно быть кратно 2 , где p – максимальный уровень анализа. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2878 3.3. Дискретное вейвлет-преобразование Дискретное вейвлет-преобразование выполняется базисными вейвлет-векторами (генераторами). В принципе, существует два вейвлет-вектора: , ; называется отцовским вейвлетом (или фильтром) и называемое материнским вейвлетом (или вейвлетом). Для осуществления кратномасштабного анализа, вейвлет векторы обладают некоторыми важными свойствами. Четные сдвиги одного вектора ортонормированы , а также четные сдвиги обоих векторов , , ∈ 0, … , , (благодаря вектору конечной длины, периодически доопределенные векторы принимаются во внимание). Далее ортогональность должна сохраняться для нормированных векторов. Пусть 2 и , такие же вейвлет-векторы, которые ⋃ является ортонормированным базисом в . Напомв базисе могут выражаться как ним, что коэффициенты исходного сигнала ∈ скалярное произведение с базисными векторами. Согласно соотношению (12), вектор в базисе может быть записан как: ∗ Следовательно, (15) 0 , ∗ ∗ 2 ,…, ∗ , ∗ 2 , ∗ 0 , ∗ 2 ,…, ∗ 2 , . Отметим, что ∗ и ∗ являются базисами и соответственно. Соотношение (15) иллюстрирует представление сигнала посредством векторов аппроксимации и детализации – также в соответствии с идеей наилучшего приближения. Вейвлет-анализ высоких уровней основывается на таких же принципах. Сначала мы анализируем вектор ∈ фильтрами и . Таким образом, мы получаем является Гильбертовым пространствектора , ∈ ⁄ . Пространство ⁄ вом, следовательно, мы можем анализировать фильтрами и . Аналогичным образом получаются векторы , ∈ и эта процедура повторяется до p-го уров⁄ ня. 4. Методы прогнозирования линейных систем Методы идентификации линейных систем разделяются на «временные» и частотные». Методы, работающие во временной области, задействуют весь частотный диапазон системы. В противоположность им, методы, работающие в частотной области, акцентируются на особом выборе частотного диапазона. Особый интерес представляют системы, относящиеся к «медленно-быстрым» – с отдельными модами медленной и быстрой динамики [34, 35]. Далее будем рассматривать дискретные линейные стационарные системы [20, 36]: (16) , ∈ , где – оператор сдвига, – нулевое среднее белого шума с дисперсией и , – сигналы входа и выхода системы. Для широкого класса задач управления с прогнозирующей моделью определяющее значение для качества управления имеют методы предсказания ошибки. Методы относятся к широкому семейству методов оценки параметров, которые имеют близкое отXII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2879 ношение к методу максимального правдоподобия [37]. Предполагается, что дискретные сигналы генерируются системой (17) , где нижний индекс «0» обозначает точное значение передаточных функций. Для одношагового прогнозатора модель оценки выглядит следующим образом [37]: (18) | 1, 1 , , , , ∈ где , , , описывают предполагаемую модель. Отфильтрованная ошибка предсказания выглядит следующим образом: , , | 1, , (19) где ниям: обозначает фильтр, и поиск параметров модели осуществляется по arg min (20) arg min 1 , измере- . Имеет место следующее Утверждение 1. Если прогнозатор является устойчивым и линейным по параметрам, а , скалярны (система с одним входом и выходом), тогда результат фильтрации такой же, как при изначальной фильтрации входо-выходных данных с последующим применением прогнозатора [20]. Результат фильтрации более нагляден в частотной области. Для фиксированной модели шума , спектр отфильтрованной ошибки прогноза : ∗ | | Ф | , , |∙ Ф (21) | ∗ | Видно, что на улучшение прогноза влияет только фильтр , т.к. Ф зависит от входа системы, а ∗ зависит от математического ожидания шума. Согласно условию линейности параметров прогнозатора была выбрана хорошо известная структурная модель ARX. Прогнозатор ARX структуры: (22) | 1, , , ,…, и векгде вектор данных измерений 1 ,…, тор неизвестных параметров ,…, , ,…, . В результате преобразования этого уравнения для всех данных измерений получается система уравнений θ, которая решается путем обычного МНК. 4. Идентификация систем и вейвлет преобразование Методы вейвлет-анализа преимущественно разработаны и применяются для анализа сигналов [33]. Мы говорили об этом в разделе 3, где ДВП было интерпретировано как частотная фильтрация. Карриер и Стефанополос [18] формулируют задачу идентификации систем в виде (25), где вейвлет-коэффициенты должны определяться как скалярное произведение сигнала времени и четных сдвигов вейвлет фильтров. В пространстве все векторы – с компактным носителем, отсюда скалярное произведение может быть записано как векторное умножение. Далее полагаем, что и из уравXII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2880 нения (12) – векторы. Для коэффициентов вейвлет-преобразования справедливы следующие утверждения: (23) ⟨ , ⟩ ⟨ , ⟩ ̅ (24) Далее будем рассматривать, что . ∈ . Тогда ̅ и За счет этой операции порядок множителей был изменен, и полученная формула может быть использована для включения вейвлет-преобразования в процедуру идентификации. В общей задаче идентификационной модели ARX , столбцы матриц данных , представляют смещенные входной и выходной сигналы, каждый из которых может быть преобразован с помощью вейвлетов в соответствии с правой частью (24). Такого рода преобразование исходной задачи может быть записано как , где матрица содержит в себе все возможные сдвиги вейвлет фильтров на всех уровнях применения. После добавления некоторой весовой матрицы, определенной пользователем, конечная задача формулируется следующим образом: (25) , и она разрешима с помощью обычного МНК. Это – классическая форма доопределенной задачи обычного МНК как показано в [17]. Но имеем в виду, что это расширение определяется с учетом факта, что оба сигнала , – действительнозначные. На практике, эти допущения обычно выполняются. Кроме того, для упрощения обозначений, будем рассматривать дествительнозначные вейвлет-фильтры, что дает нам . Отметим, что на первый взгляд, кажется лучше использовать входо-выходные данные фильтрации, т.е. сначала провести фильтрацию входо-выходных данных, а затем их использовать для создания , (как показано на рис. 1(b)). Однако важно понимать, что каждый вейвлет-коэффициент несет информацию о временном интервале той же длины, как длина вейвлет-фильтра. Таким образом, невозможно построить , из отфильтрованных данных, потому что они не содержат необходимую структуру модели. Для идентификации систем вейвлет-преобразование используется как предварительная фильтрация сигналов во временной и частотной области (как показано на рис. 1(c)). Такой подход может быть применен в идентификации систем на основе ассоциативного поиска. 5. Идентификация нелинейных систем на основе процедуры ассоциативного поиска Для идентификации сложных нелинейных динамических объектов, таких как технологические процессы непрерывных и полунепрерывных производств, в работе [3842] был предложен алгоритм идентификации с непрерывной самонастройкой в режиме реального времени на основе построения виртуальных моделей. Алгоритм позволяет в режиме советчика корректировать качество основных показателей выпускаемого продукта на основе статистической обработки данных приборных измерений и лабораторного контроля. В каждый момент времени создается новая модель. Для построения модели формируется временная база данных архивной и текущей технологической информации. После определения прогноза выхода по текущему состоянию объекта эта виртуальная база уничтожается без запоминания. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2881 Линейная динамическая прогнозирующая модель имеет следующий вид: (26) , , где – прогноз выхода объекта на момент времени , – вектор входных воздействий, – глубина памяти по выходу, – глубина памяти по входу, – размерность вектора входов, и – настраиваемые коэффициенты, причем , выбраны не в порядке хронологического убывания. Нелинейный динамический алгоритм состоит в построении в каждый момент времени аппроксимирующей гиперповерхности пространства входных векторов и соответствующих им одномерных выходов [43]. Для построения виртуальной модели, соответствующей некоторому моменту времени, выбираются точки в n-мерном пространстве, в определенном смысле близкие к текущему входному вектору. Критерии отбора точек описаны ниже. Размерность этой гиперповерхности выбирается эвристически. Поскольку архивы технологических данных различных производственных процессов, как правило, имеют значительную глубину, то для решения практических задач методом ассоциативного поиска целесообразно выбрать достаточно большое («с запасом») количество входных векторов из архива. Далее на основе классического (не рекуррентного) метода наименьших квадратов (МНК) определяется значение выхода в следующий момент времени. В предположении, что входные воздействия удовлетворяют условиям Гаусса-Маркова, оценки, получаемые по методу наименьших квадратов, являются состоятельными, несмещенными статистически эффективными. Необходимо подчеркнуть, что такой алгоритм не строит единственную аппроксимирующую модель реального процесса – он строит новую модель для каждого момента времени, будучи при этом эффективным алгоритмом идентификации, поскольку оценки параметров в любой момент времени являются наилучшими в смысле среднеквадратической ошибки. Каждая точка глобальной нелинейной поверхности регрессии получается в результате использования линейных «локальных» моделей. Методы построения аппроксимирующей гиперповерхности определяются критерием отбора входных векторов из архива. Критерии получили название ассоциативных импульсов. Критерий отбора входных векторов из архива для построения виртуальной модели в данный момент времени по текущему состоянию объекта состоял в том, что на первом шаге выбиралась точка ( -мерный вектор входов), для которой модуль разности первой компоненты и, соответственно, первой компоненты текущего входного вектора принимал минимальное значение по всему массиву архива входов. Далее из ранжированных по убыванию модулей разностей первых компонент выбиралась точка в пространстве входов, для которой минимальное значение принимал модуль разности вторых компонент, и так далее. По такой схеме отбирались точек, , без гарантии, что получаемая система линейных уравнений будет иметь решение. В целях преодоления проблемы разрешимости соответствующей системы уравнений и с целью повышения быстродействия можно применить следующий подход. Рассмотрим простейший случай, когда ассоциативный импульс определяется как минимальное расстояние до текущего вектора входов в смысле выбранной метрики в S) между точками в выбираетмерном пространстве. В качестве расстояния (нормы в ся величина («Манхэттенское расстояние»): , , , ,∀ 1, … , XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2882 где – компоненты вектора входов в текущий момент времени . В силу одного из свойств нормы («неравенство треугольника») имеем: , , , ,∀ , 1, … , Пусть для текущего вектора входов (27) , Для построения аппроксимирующей гиперповерхности для вектора отберем из , 1, … , , что для некоторого заданного архива входных данных такие векторы будет выполнено условие: , где ,∀ , 1, … , может быть выбрано, например, из условия 2 2 max , . Если в выбранной области не наберется достаточного числа входов для применения МНК, т.е. соответствующая система линейных уравнений окажется неразрешимой, то выбранный критерий отбора точек в пространстве входов можно будет ослабить путем увеличения порога . Предлагаемая процедура построения аппроксимирующей поверхности обладает более высоким быстродействием по сравнению с обычным перебором, поскольку вели∑ чины 1, … , 1, для всех моментов времени, пред, , шествующих , могут быть на этапе обучения однократно определены и ранжированы, а по мере поступления нового входа этот ряд пополняется новым членом. Для построения прогнозирующей модели, соответствующей некоторому моменту времени, из архива выбираются векторы, в определенном смысле близкие к текущему входному вектору (см. рис. 2). Далее на основе МНК определяется прогнозируемое значение выхода. Таким образом, алгоритм построения прогнозирующей (идентификационной) модели состоит в следующем: 1 Шаг. Для вновь поступившего текущего входного вектора задаем область векторов входов (из архива) (см. рис. 4 и 5), допустимо близких (по критерию минимума расстояния (нормы в ) между точками S-мерного пространства: , , , ,∀ 1, … , к исследуемому текущему вектору входов. Для этого назначаем . (Либо эксперт определяет непосредственно числовые значения, либо разработчики руководствуются самыми простыми соображениями, что мы и сделали на первом этапе, применив соотношение (27)). 2 Шаг. Начинаем выбирать входные векторы из архива. Всего их нужно отобрать столько, чтобы соответствующая система линейных уравнений, необходимая для получения прогноза по методу наименьших квадратов, оказалась разрешимой. Для отбора проверяем, принадлежит данный вектор обозначенной области «близости к текущему входному вектору», или нет. Таким образом, динамический алгоритм состоит в построении в каждый момент времени аппроксимирующей гиперповерхности пространXII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2883 ства входных векторов и соответствующих им одномерных выходов. Технологический архив Рис. 4. Построение прогнозирующей модели, соответствующей некоторому моменту времени. 3 Шаг. На основе метода наименьших квадратов определяется значение выхода в следующий момент времени. В соответствии с классической теоремой, получаемые таким образом оценки параметров в любой момент времени являются наилучшими в смысле среднеквадратической ошибки. При этом каждая точка глобальной нелинейной поверхности регрессии получается в результате использования линейных «локальных» моделей. Полученные результаты по исследованию «близости» входных векторов из архива текущему входному вектору в момент времени одновременно с решением задачи прогноза сформировали наборы векторов, которые в дальнейшем используются в качестве результатов «обучения». А именно: теперь для формирования «близкого окружения» для каждого нового вектора входов могут быть использованы уже готовые наборы архивных заготовок, что существенно увеличивает быстродействие алгоритма. Эти наборы в терминах процедуры ассоциативного поиска являются ассоциациями. , , | | , Рис. 5. Область векторов входов допустимо близких к входному вектору. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2884 6. Применение вейвлет-анализа для построения прогнозирующих моделей методом ассоциативного поиска Применение вейвлет-анализа для построения прогнозирующих моделей методом ассоциативного поиска представляется актуальным в условиях нестационарности, как для случая нестационарного входного сигнала, так и в случае немоделируемой динамики самого объекта. Для большинства практических приложений, в особенности, для задач управления с идентификатором, входное воздействие представляет собой вектор. Пусть каждая компонента этого вектора удовлетворяет условиям Гаусса-Маркова, в частности, условию независимости членов последовательности. Кроме того, предположим, что для любого момента времени компоненты вектора входов взаимно независимы. В то же время предположим, каждая из компонент вектора входов не является стационарной последовательностью; однако, ее сингулярные проявления, случайно проявляющиеся во времени, в определенном смысле схожи либо идентичны. В технических системах некоторая «повторяемость» свойств входных сигналов может быть отмечена при статистическом анализе данных систем мониторинга. Некоторые процессы имеют ярко выраженную цикличность, например, процесс динамики нагрузки в электрических сетях, и т.д. Для того, чтобы применить алгоритм ассоциативного поиска, нам по-прежнему необходимо выбрать из архива векторы, близкие к текущему вектору входов в смысле выбранного критерия (ассоциативного импульса). Сначала ограничимся рассмотрением одномерного случая (один вход – один выход). Поскольку входная последовательность не является стационарной, представляется целесообразным исследовать дискретные вейвлет-разложения входных сигналов. В общем случае такое разложение может быть представлено формулой (28) , , , где – глубина кратно-масштабного разложения, уровень детализации анализа, – масштабирующие коэффициенты, , – детализирующие коэффициенты. Пусть – вейвлеты Хаара, рассмотренные в разделе 2, а – одномерный вход. Для выбранного уровня детализации L для текущего одномерного входа получаем кратномасштабное разложение: ⁄ ⁄ , , , , 2 . Коэффициенты вычисляются посредством алгоритма Малла. В процедуре ассоциативного поиска будем отбирать из архива такие входы для которых вейвлет-разложение той же глубины L ⁄ ∗ ⁄ ∗ , ∗ , , ∗ удовлетворяет следующим двум условиям: XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. ∗ , 2885 ⁄ ⁄ ∗ (29) где ∗ , ∗ , ∗ , – положительная величина, → , 0; а для всех коэффициентов , , 1, … , ⁄2 существует такая константа ̃ , что ̃ , ∗ (30) . ∗ В силу неравенства треугольника, имеем: ⁄ ⁄ ∗ , , ∗ , , ⁄ ⁄ , ∗ , , ̃ , , ⁄2 ∙ max ,… ⁄ , , где ̃ Из совместного выполнения условий (29) и (30) следует | ∗ | | ∗ | | | ⁄ ⁄ ∗ ∗ , ∗ ⁄ , ∗ ⁄ , ⁄ , ⁄ ∗ ⁄ ∗ , ∗ , ∗ ⁄ , , ̃ 0. Таким образом, ассоциативный импульс, т.е. критерий отбора входных векторов из архива, выражается совокупностью условий (29), (30). Рассмотрим случай многомерного входа. Прогнозируемое значение выхода в процедуре ассоциативного поиска получается с помощью метода наименьших квадратов. С учетом независимости компонент вектора входов следует формировать критерий ассо1, разциативного поиска как условие существования таких констант ̃ , где мерность вектора входов, что одновременно выполняются неравенства: ̃ ∗ , , (31) ∗ для всех 1, . ∗ Выбираемым из архива P векторам соответствуют P известных выходов, удовлетворяющих уравнениям виртуальных линейных моделей: ∗ ∗ Прогнозируемое значение . вычисляется по методу наименьших квадратов. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2886 Рассмотрим случай немоделируемой внутренней динамики объекта. В процедуре ассоциативного поиска на каждом такте мы строим свою линейную модель нелинейного объекта. . В нестационарном случае коэффициенты переходной функции, вообще говоря, зависят от t. Пусть на первом этапе процедуры ассоциативного поиска из технологического архива выбраны P входных векторов x(t * ) , удовлетворяющих условиям (26), (31). Построенные виртуальные модели имеют вид: ∗ ∗ ∗ . С учетом вейвлет-разложения входных сигналов имеем: ⁄ ∗ ⁄ ∗ ∗ ∗ ∗ ∗ , ⁄ ∗ ∗ ∗ ⁄ ∗ ∗ ∗ , ∗ Заметим, что и , в общем случае, различны. Рассмотрим два специальных случая, когда это различие можно формализовать. 1) Аддитивный сдвиг: ∗ ∗ , ∗ | где | 0, ∀ 1, . Для простоты ограничимся рассмотрением случая, когда степень детализации кратномасштабного анализа достаточно высока, что , 1, . В этом случае приводит к обнулению коэффициентов масштабирования имеем место соотношение: ⁄ ∗ ∗ ∗ , ⁄ ∗ ∗ , ⁄ ∗ ∗ ∗ В частности, при | | , имеем: ⁄ ⁄ ∗ ∗ ∗ , ∗ Введем обозначения: XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. ∗ , ∗ 2887 ⁄ (32) ∗ ⁄ ∗ ∗ ∗ ∗ , , ∗ 2) Мультипликативный сдвиг: Пусть теперь ∗ ∗ ∙ , ∗ | где | 0, ∀ 1, . Тогда справедливы равенства: ⁄ ∗ ∗ ∗ ∗ , ⁄ ∙ В частности, при | ∗ | ∗ ∗ , ∗ : ⁄ (33) ∗ ∗ , ∗ Уравнения (32), (33) непосредственно используются в алгоритме прогнозирования, вместе с уравнением для . Заметим, что все уравнения содержат теперь в качестве . неизвестных коэффициенты 7. Заключение В работе приведен анализ алгоритмов идентификации, основанных на применении вейвлет-анализа. Рассмотрены случаи линейных и нелинейных систем. Предложены методы ассоциативного поиска на основе кратномасштабного вейвлет-преобразования для случаев нестационарной входной последовательности и немоделируемой внутренней динамики объекта. Список литературы 1. 2. 3. 4. 5. 6. 7. 8. 9. Козлов П.В., Чен Б.Б. Вейвлет-преобразование и анализ временных рядов // Вестник КРСУ. № 2. 2002. Grossman A., Morlet J. Decomposition of Hardy functions into square integrable wavelets of constant shape // SIAM J. Math. 1984. Vol. 15, No. 4, P. 723-736. Ghanem R., Romeo F. A wavelet-based approach for the identification of linear time-varying dynamical systems // Journal of Sound and Vibration. 2000. Vol. 234, No. 4. P. 555-576. Ghanem R., Romeo F. A wavelet-based approach for model and parameter identification of non-linear systems // International Journal of Non-Linear Mechanics. 2001. Vol. 36, No. 5, P. 835-859. Tsatsanis M., Giannakis G. Time-varying system identification and model validation using wavelets // IEEE Transactions on Signal Processing. 2002. Vol. 41, No. 12. P. 3512-3523. Wei H.L., Billings S.A. Identification of time-varying systems using multiresolution wavelet models // International Journal of Systems Science. 2002. Vol. 33, No. 15. P. 1217-1228. Staszewski W. Identification of non-linear systems using multi-scale ridges and skeletons of the wavelet transform // Journal of Sound and Vibration. 1998. Vol. 214, No. 4. P. 639-658. Kiran S.R., Raju S.S.N., Varadarajan S., Shankar E.A., Herrera J.C., Alvarez J.A., Rivera I., Olguin M., Arumugam S., Ramareddy S., et al. LTI system identification using wavelets // Journal of Theoretical and Applied Information Technology. 2009. Vol. 10, No. 1. P. 1-8. Kijewski T., Kareem A. Wavelet transforms for system identification in civil engineering // ComputerAided Civil and Infrastructure Engineering. 2003. Vol. 18, No. 5. P. 339-355. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2888 10. Ruzzene M., Fasana A., Garibaldi L., Piombo B. Natural frequencies and dampings identification using wavelet transform: application to real data // Mechanical Systems and Signal Processing. 1997. Vol. 11, No. 2. P. 207-218. 11. Ho K., Blunt S. Adaptive sparse system identification using wavelets // IEEE Transactions on Circuits and Systems II: Analog and Digital Signal Processing. 2003. Vol. 49, No. 10. No. 656-667. 12. Sureshbabu N., Farrell J.A. Wavelet-based system identification for nonlinear control // IEEE Transactions on Automatic Control. 1999. Vol. 44, No. 2. P. 412-417. 13. Shi H.-l., Cai Y.-l., Qiu Z.-l. Improved system identification approach using wavelet networks // Journal of Shanghai University (English Edition). 2005. Vol. 9, No. 2. P. 159-163. 14. Preisig H.A., Rippin D.W.T. Theory and application of the modulating function method-I. Review and theory of the method and theory of the spline-type modulating functions // Computers & Chemical Engineering. 1993. Vol. 17, No. 1. P. 1-16. 15. Preisig H.A., Rippin D.W.T. Theory and application of the modulating function method-II. Algebraic representation of maletinsky’s spline-type modulating functions // Computers & Chemical Engineering. 1993. Vol. 17, No. 1. P. 17-28. 16. Preisig H.A., Rippin D.W.T. Theory and application of the modulating function method-III, application to industrial process, a well-stirred tank reactor // Computers & Chemical Engineering. 1993. Vol. 17, No. 1. P. 29-39. 17. Preisig H.A. Parameter estimation using multi-wavelets // 20th European Symposium on Computer Aided Process Engineering in: Computer Aided Chemical Engineering. Elsevier. 2010. Vol. 28. P. 367-372. 18. Carrier J.F., Stephanopoulos G. Wavelet-based modulation in control-relevant process identification // AIChE Journal. 1998. Vol. 44, No. 2. P. 341-360. 19. Frazier M. An Introduction to Wavelets Through Linear Algebra. Springer, 1999. 20. Ljung L. System Identification: Theory for the User, 1999. 21. Малла С. Вэйвлеты в обработке сигналов. М.: Мир, 2005. 22. Астафьева Н. М. Вейвлет-анализ: основы теории и примеры применения // Успехи физических наук. 1996. Т. 166. № 11. С. 1145-1170. 23. Яковлев А. Н. Введение в вейвлет-преобразования: учеб. пособие. НГТУ, 2003. 104 с. 24. Daubechies I. Ten lectures on wavelets. University of Lowell, Philadelphia: Society for Industrial and Applied Mathematics (SIAM). 1992. 25. Шоберг А.Г. Анализ одномерного сигнала на основе нечетного и четного базисов вейвлетов с компактными носителями// Интеллектуальные системы. 2012. № 3 (33). С. 150-157. 26. Смоленцев Н.К. Основы теории вейвлетов. Вейвлеты в MATLAB. М.: ДМК, 2005. 27. Дьяконов В.П. Вейвлеты. От теории к практике. М.: СОЛОН-Пресс, 2004. 28. Амосова Л.Н., Магола Д.С. Оценивание случайных последовательностей с использованием регрессии и вейвлетов // Интеллектуальные системы. 2009. № 3 (21). С. 101-109. 29. Heil C., Walnut D. Continuous and discrete wavelet transforms // SIAM Review. 1989. Vol. 31, No. 4. P. 628-666. 30. Mallat S. A Wavelet Tour of Signal Processing. Academic Press, 1999. 31. Rao R.M., Boros T., Bopardikar A.S. Wavelet transforms: introduction to theory and applications // Journal of Electronic Imaging. 1999. Vol. 8, No. 4. P. 478. 32. Kölzow D. Wavelets, A tutorial and a bibliography, Rendiconti dell’Istituto di matematica dell’Università di Trieste, 1994. 49 p. 33. Rudin W. Real and Complex Analysis. New York: McGraw-Hill Inc., 1986. 34. Kokotovic P., Khalil H. Singular Perturbations in Systems and Control. New York: IEEE Press, 1986. 502 p. 35. Ferkl L., Široký J. Ceiling radiant cooling: comparison of ARMAX and subspace identification modelling methods // In: International Symposium on the Interaction Between Human and Building Environment. Special Issue Section. Building and Environment. 2010. Vol. 45, No. 1. P. 205-212. 36. Van den Hof P.M.J. System Identification, 1998. 37. Ljung L. Prediction error estimation methods // Circuits, Systems, and Signal Processing. 2002. Vol. 21, No. 1. P. 11-21. 38. Váňa Z., Preisig H.A. System identification in frequency domain using wavelets: Conceptual remarks // Systems & Control Letters. 2012. Vol. 61, No. 10. P. 1041-1051. 39. Bakhtadze N., Lototsky V., Maximov E., Pavlov B. Associative Search Models in Industrial systems // Preprints of IFAC Workshop on Intelligent Manufacturing Systems IMS '07. Alicante: University of Alicante, 2007. P. 156-161. 40. Bakhtadze N.N., Yadykin I.B., Lototsky V.A., Maximov E.M., Sakrutina E.A. Multi-Agent Approach to Design of Multimodal Intelligent Immune System for Smart Grid // IFAC-PapersOnLine. ISSN: 1474-6670. Manufacturing Modelling, Management, and Control. 2013. Vol. 7, Part 1. P. 1164-1169. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г. 2889 41. Bakhtadze N.N., Pavlov B.V., Sakrutina E.A. Development of Intelligent Identification Models and their Applications to Predict the Submarine Dynamics by Use of Computer Simulation Complexes // IFACPapersOnLine. ISSN: 1474-6670. Manufacturing Modelling, Management, and Control. 2013. Vol. 7, Part 1. P. 1244-1249. 42. Bakhtadze N.N., Lototsky V.A., Vlasov S.A., Sakrutina E.A. Associative Search and Wavelet Analysis Techniques in System Identification // IFAC-PapersOnLine. ISSN: 1474-6670. 16th IFAC Symposium on System Identification. 2012. Vol. 16, Part 1. P. 1227-1232. 43. Чадеев В.М. Цифровая идентификация нелинейных динамических объектов // Автоматика и телемеханика. 2004. № 12. С. 85-93. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г.