Численное обращение преобразования Лапласа
реклама

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
Нижегородский государственный университет им. Н.И. Лобачевского
Национальный исследовательский университет
Учебно-научный и инновационный комплекс
«Модели, методы и программные средства»
Игумнов Л.А., Литвинчук С.Ю., Белов А.А.
ЧИСЛЕННОЕ ОБРАЩЕНИЕ ПРЕОБРАЗОВАНИЯ ЛАПЛАСА
(Учебно-методическое пособие)
Мероприятие 1.2. Совершенствование образовательных технологий, укрепление материальнотехнической базы учебного процесса
Учебные дисциплины: «Метод граничных интегральных уравнений»
Специальности, направления: «Прикладная математика и информатика».
ННГУ, 2010
УДК 519.6
ББК 22.193
И26
И26
Игумнов Л.А., Литвинчук С.Ю., Белов А.А. ЧИСЛЕННОЕ
ОБРАЩЕНИЕ ПРЕОБРАЗОВАНИЯ ЛАПЛАСА: Учебно-методическое пособие. –
Нижний Новгород: Нижегородский университет, 2010. – 34 с.
Рецензент: к.т.н. С.А. Исаев
В пособии изложены численные методы обращения преобразования Лапласа.
Приводится теория в объеме, предусмотренном программой по спецкурсу «Метод
граничных интегральных уравнений». Рассмотрены примеры численного обращения
преобразования Лапласа. Разработка предназначена для студентов ННГУ,
обучающихся по направлению подготовки 010500 «Прикладная математика и
информатика».
Ответственный за выпуск:
председатель метод. комиссии механико-математического факультета ННГУ
к.ф.-м.н., доцент Н.А. Денисова
УДК 519.6
ББК 22.193
© Нижегородский государственный
университет им. Н.И. Лобачевского, 2010
2
Содержание
1. Прямое преобразование Лапласа. Формула Меллина...................................4
2. Свойства преобразования Лапласа и теоремы ...............................................6
2.1. Абсолютная сходимость...........................................................................6
2.2. Достаточные условия существования прямого и обратного
преобразования Лапласа..........................................................................7
2.3. Основные теоремы....................................................................................7
3. Численное обращение преобразования Лапласа ...........................................9
3.1. Интегрирование быстро осциллирующих функций..............................9
3.2. Формуы Филона и Левина .....................................................................11
3.3. Обращение преобразования Лапласа методом Дурбина ....................12
3.3.1. Алгоритм
метода
Дурбина
с
аппроксимацией
трансформанты ...............................................................................13
3.3.2. Комбинированные формулы метода Дурбина.............................15
3.3.3. Численное обращение преобразования Лапласа на основе
метода Дурбина...............................................................................16
3.4. Метод квадратур сверток .......................................................................23
3.4.1. Традиционный метод квадратур сверток .....................................23
3.4.2. Модификации метода квадратур сверток ....................................24
3.4.3. Численные результаты на основе метода квадратур сверток ....26
3.5. Шаговый метод обратного преобразования Лапласа..........................30
Литература ...........................................................................................................33
3
1. Прямое преобразование Лапласа. Формула Меллина
Рассмотрим функцию f (t ) вещественной переменной t. Будем считать,
что на эту функцию наложены следующие ограничения:
1. f (t ) ≡ 0 при t < 0 ;
2. Существуют такие постоянные М и s0 , что f (t ) ≤ Me s 0 t . Константа
s0 называется показателем роста функции f (t ) .
Преобразованием (прямым интегральным преобразованием) Лапласа от
функции f (t ) называется функция:
∞
F ( p) ≡ f ( p) = ∫ f (t )e − pt dt
0
от комплексной переменной p = α + iω . Функцию f (t ) называют оригиналом,
а функцию F ( p) ≡ f ( p ) - ее изображением. Изображение F ( p ) определено в
полуплоскости Re p = α > s0 и является в этой полуплоскости аналитической
функцией.
Не только f (t ) однозначно определяет F ( p ) , но и F ( p ) однозначно
определяет f (t ) . Это соответствие дается формулой обращения (формулой
Меллина, интегралом Бромвича) – формулой обратного преобразования
Лапласа. Она имеет вид:
a + i∞
1
f (t ) =
F ( p )e pt dp.
∫
2πi a − i∞
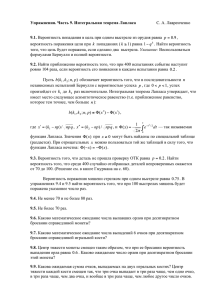
Рис. 1. Путь интегрирования в формуле Меллина
В формуле Меллина пределы интегрирования (α − i∞, α + i∞) означают,
что интегрирование идет по бесконечной прямой, параллельной оси Im p и
4
пересекающей ось Re p в точке α > s0 (рис. 1). Так как можем записать
p = α + iω ( α – константа, а ω – переменная интегрирования), то dp = idω ,
− ∞ < ω < +∞ , и формула обращения может быть явно записана в виде:
1
f (t ) =
2π
+∞
∫ F (α + iω )e
(α + iω )t
dω.
−∞
Формула Меллина в представленном виде редко используется в
приложениях: пользуются специальными таблицами или ее вариантами в виде
конечных сумм, построенных для численного интегрирования.
5
2. Свойства преобразования Лапласа и теоремы
Пусть F ( p ) и G ( p ) являются преобразованиями Лапласа от функций
f (t ) и g (t ) соответственно.
• Линейность: αf (t ) ± βg (t ) ⇔ αF ( p ) ± βG ( p ).
1 ⎛ p⎞
• Теорема подобия: f (αt ) ⇔ F ⎜ ⎟ .
α ⎝α ⎠
• Дифференцирование оригинала:
f ( n) (t ) ⇔ p n F ( p ) − p n −1 f ′(0) − p n − 2 f ′′(0) − ... − f ( n −1) (0) .
Это свойство обеспечило популярность преобразованию Лапласа:
операцию дифференцирования оригинала f (t ) заменяет операцией умножения
изображения на p.
• Дифференцирование изображения: F (n) ( p) ⇔ (−1) n t n f (t ) .
• Интегрирование оригинала:
t
∫ f (t )dt ⇔
0
F ( p)
.
p
Это свойство является важным для приложений, так как заменяет
сложную операцию интегрирования оригинала операцией деления изображения
на p.
∞
f (t )
• Интегрирование изображения:
⇔ ∫ F(~
p )d~
p.
t
p
• Предельные соотношения: lim pF ( p ) = f (0); lim pF ( p ) = f ( +∞ ) .
p →∞
p →0
2.1. Абсолютная сходимость
Если интеграл Лапласа абсолютно сходится при α = α 0 , то есть
существует предел
b
lim ∫ f (t ) e
b →∞ 0
−α 0 t
∞
dt = ∫ f (t ) e −α 0 t dt ,
0
то он сходится абсолютно и равномерно для α ≥ α 0 и F(p) – аналитичная
функция при α ≥ α 0 ( α = Re p – действительная часть комплексной
переменной p). Точная нижняя грань α 0 множества чисел α , при которых это
условие выполняется, называется абсциссой абсолютной сходимости
преобразования Лапласа для функции f (t ).
6
2.2. Достаточные условия существования прямого и обратного
преобразования Лапласа
Преобразование Лапласа существует в смысле абсолютной сходимости в
следующих случаях:
1. Случай α ≥ 0 : преобразование Лапласа существует, если существует
∞
интеграл ∫ f (t ) dt .
0
t1
2. Случай α > α 0 : преобразование Лапласа существует, если интеграл ∫ f (t ) dt
α 0t
0
существует для каждого конечного t1 > 0 и f (t ) ≤ Me для t > t0 ≥ 0 .
3. Случай α > 0 или α > α 0 (какая из границ больше): преобразование Лапласа
существует, если существует преобразование Лапласа для функции f ′(t )
(производная к f (t ) ) для α > α 0 .
Для существования обратного преобразования Лапласа достаточно
выполнение следующих условий:
1. Если изображение F(p) — аналитичная функция для α > α 0 и имеет порядок
меньше −1, то обратное преобразование для неё существует и непрерывно
для всех значений аргумента, причём f (t ) = 0 для t ≤ 0 .
2. Пусть F ( p ) = ϕ[ F1 ( p ), F2 ( p ),..., Fn ( p )] , так что ϕ ( z1 , z 2 ,..., z n ) аналитична
относительно каждого z k и равна нулю для z1 = z 2 = ... = z n = 0 , и
Fk ( p ) = L{ f k ( x )} (ω > ω ak : k = 1,2,..., n) , тогда обратное преобразование
существует и соответствующее прямое преобразование имеет абсциссу
абсолютной сходимости.
2.3. Основные теоремы
Теорема 1. Все ξ -изображения F ( p ) обладают следующим общим
свойством: они стремятся к нулю, когда переменная p, пробегая вещественные
значения, стремится к + ∞ ; это свойство сохраняется даже в том случае,
когда p стремится к ∞ вдоль луча комплексной плоскости, образующего с
положительной вещественной осью угол, по абсолютному значению меньший
π /2.
Сформулированная теорема дает необходимое условие, которому
должно удовлетворять каждое ξ -изображение; часто она позволяет
непосредственно установить, что та или иная функция не может представлять
собой результат преобразования Лапласа какой-либо исходной функции. Так,
например, сразу можно сказать, что постоянная с ≠ 0 или степень, sα с
7
положительным α не могут быть ξ -изображениями никаких исходных
функций.
Однако условие F ( p ) → 0 при p → ∞ ни в коем случае не является
достаточным для того, чтобы функция F ( p ) представляла собой ξ изображение. Так, например, функция e − p стремится к нулю на каждом луче,
наклоненном к положительной вещественной оси на угол, меньший π / 2 , но,
тем не менее, она не является ξ -изображением никакой исходной функции.
Теорема 2 (теорема о начальном значении). Если lim y (t ) существует,
t→0
то
lim y (t ) = lim pY ( p ) .
t →0
p →∞
Зная только изображение по Y(p) теорема дает возможность определить
lim y (t ) = y ( +0) , когда заранее известно, что y (+0) существует (хотя само
t →0
значение y (+0) неизвестно).
Возможны случаи, когда существует
lim pY ( p ) , но не существует
p →∞
lim y (t ) . Например, оригиналу y (t ) = 1 / t cos(1 / t ) соответствует изображение
t→0
−
Y ( p ) = π / pe
2p
cos 2 p .
Получаем
lim pY ( p ) =0,
p →∞
но
lim y (t )
t→0
не
существует.
Теорема 3 (теорема о конечном значении). Если lim y (t ) существует,
t →∞
то
lim y (t ) = lim pY ( p ) .
t →∞
p →0
Эта теорема позволяет, имея изображение Y(p), определить
lim y (t ) = y (+∞) , если только заранее известно, что y (+∞) существует.
t →∞
Теорема 4 (запаздывания) f (t − τ ) ⇔ e − pτ F ( p) .
Теорема 5 (смещения) e p 0 t f (t ) ⇔ F ( p − p0 ) .
0
Теорема 6 (умножения) F ( p)G ( p) ⇔ ∫ f (τ ) g (t − τ )dτ .
0
t
Комбинация
∫ f (τ ) g (t − τ )dτ
называется сверткой функций f (t ) и g (t )
0
и обозначают символом f (t ) ∗ g (t ) .
8
3. Численное обращение преобразования Лапласа
Когда
f ( p ) известна, обращение может быть получено методами
комплексного анализа. При решении задач f ( p ) обычно определяется в
дискретных точках, и поэтому интеграл необходимо вычислять численными
методами.
3.1. Интегрирование быстро осциллирующих функций
Пусть требуется вычислить интеграл
b
I (ω , a, b) = ∫ f ( x)e iωx dx,
a
где ω (b − a ) >> 1, f ( x) – гладкая функция.
Функции Re( f ( x)e iωx ), Im( f ( x)e iωx ) имеют на рассматриваемом
отрезке примерно ω (b − a) / π нулей. Такие функции при n >> ω (b − a ) / π могут
быть хорошо приближены многочленами степени n. Вместо применения
многочленов высокой степени рассмотрим случай построения численного
интегрирования, когда функция g ( x, ω ) = e iωx рассматривается как весовая.
После замены f ( x) интерполянтой Ln ( x) на узлах
x j = (b + a ) / 2 + (b − a )d j / 2, j = 1,..., n ,
строится следующая квадратурная сумма:
b − a iω ( b + a ) / 2 n
⎛ b−a⎞
ω
I (ω , a, b) ≈ S n ( f ) =
e
D j ⎜ω
(1)
⎟ f (x j ) ,
∑
2
2
⎝
⎠
j =1
где
1⎛
ξ − d k ⎞⎟ iwξ
D j ( w) = ∫ ⎜ ∏
e dξ .
(2)
⎜ k ≠ j d j − dk ⎟
−1⎝
⎠
Ошибка интегрирования для такой квадратурной формулы имеет следующий
вид:
b
Rn ( f ) = ∫ ( f ( x) − Ln ( x))e iωx dx ≤
a
n +1
b
⎛
⎞⎛ b − a ⎞
≤ ∫ f ( x) − Ln ( x) dx ≤ D(d1 ,..., d n )⎜ max f ( n ) ( x) ⎟⎜
⎟ .
[
a,b]
2
⎝
⎠
⎝
⎠
a
Использование формул (1), (2) для вычисления интегралов от функций,
не являющихся быстро осциллирующими, продемонстрируем для случая
n = 2, d1 = −1, d 2 = 1 :
9
1
D1 ( w) =
1 − ξ iwξ
sin w w cos w − sin w
e
d
=
+
ξ
i,
∫ 2
2
w
w
−1
1
D2 ( w) =
1 + ξ iwξ
sin w w cos w − sin w
e
d
=
+
ξ
i.
∫ 2
2
w
w
−1
При w → 0 имеем
w cos w − sin w
w
sin w
3
+
O
(
w
)
→
0
,
→ 1.
3
w
w2
Таким образом, D1 ( w), D2 ( w) → 1 при w → 0 .
Пусть w – малое число. Функции sin w и wcos w вычисляются с
погрешностями O(2 −t ) и O( w2 −t ) соответственно. Вследствие этого
=−
коэффициенты D1 ( w), D2 ( w) приобретают погрешность O(2 −t / w) . При n > 2
оказывается, что погрешность коэффициентов D j ( w) , вычисляемых по
формулам (1), может оказаться величиной порядка 2 −t / w n −1 . Например, при
t = 30, n = 5, w = 0,01 такая погрешность уже недопустима, поэтому при
вычислении интегралов от быстро осциллирующих функций необходимо иметь
вариант расчетных формул при малых w с тем, чтобы избежать существенного
влияния вычислительной погрешности.
Для случая малых n применим следующую схему: при w > wn , где
некоторое wn подбирается экспериментально, вычисления производим по
формулам (1), (2); если w ≤ wn , то вычисляем исходный интеграл по формуле
Ньютона–Котеса, рассматривая всю функцию f ( x)e iωx как подынтегральную.
В рассматриваемом случае ( n = 2, d1 = −1, d 2 = 1 ) формула трапеций
приобретает вид:
b
∫ f ( x )e
iωx
a
dx ≈
[
]
b − a iωa
e f (a) + e iωb f (b) .
2
(3)
Формулы (1), (3) можно объединить в одну комбинированную формулу:
b
∫ f ( x )e
iωx
dx =
a
b − a iω ( a + b ) / 2
[D1 ( w) f (a) + D2 (w) f (b)] ,
e
2
⎧ sin w w cos w − sin w
±
i при w > w2 ,
⎪
w2
где w = ω (b − a ) / 2, D1, 2 ( w) = ⎨ w
⎪e m wi
при w ≤ w2 .
⎩
Рассматривался также случай, когда ( n = 3, d1 = −1, d 2 = 0, d 3 = 1)
b
∫ f ( x )e
iωx
dx = (b − a )e
iω
a +b
2
[D1 ( w) f (a) + D2 ( w) f ((a + b ) / 2) + D3 ( w) f (b)] / 2 ,
a
где w = ω (b − a ) / 2 ,
10
при w > w3
⎧
2ie iw + we iw + 3we −iw − 2ie −iw + 2w 2 ie −iw
D
,
=
⎪ 1
3
2w
⎪⎪
iw
iw
−iw
− we −iw / w 3 ,
⎨ D2 = 2 − ie − we + ie
⎪
− 3we iw − 2ie iw + 2w 2 ie −iw + 2ie −iw − we −iw
,
⎪ D3 = −
⎪⎩
2w3
⎧ D1 = e − wi / 2,
⎪
при w ≤ w3 ⎨ D2 = 1,
⎪
wi
⎩ D3 = e / 2.
(
)
3.2. Формуы Филона и Левина
Метод Филона вычисления интегралов вида
b
I ( f ) = ∫ f ( x)e iωg ( x ) dx
a
строится путём аппроксимирования функции f (x) полиномом p (x) степени
меньше, либо равной v-1 в узловых точках с1 , c 2 ,..., cv . Вычисляется
b
I ( f ) = ∫ p( x)e iωg ( x ) dx .
*
a
A.Iserles и S.P.Norsett показали, что точность вычисления возрастает с
увеличением осцилляций. В работах A.Iserles и S.P.Norsett (2005) продолжена
разработка подхода. Методы Филона (обычный и обобщенный) эффективны
для некоторых гладких функций, удовлетворяющих условию, что интегралы
вида
b
J (k ) = ∫ x k e iωg ( x ) dx
a
могут быть явно посчитаны (Kompis V., 2002).
Метод Левина (1982) также эффективен и применим к широкому классу
интегралов вида
I ( f ) = ∫ f ( x)e iωg ( x ) dx
без использования явных вычислений. Д.Левин (1997) показал, что для
достаточно больших ω точность растет, когда увеличиваются осцилляции. Для
некоторых гладких функций f (x) и произвольно выбранных узловых точек
интегрирования с1 , c 2 ,..., cv на отрезке [a, b ] метод Филона и метод Левина для
интеграла вида
11
b
I ( f ) = ∫ f ( x)e iωg ( x ) dx
a
совпадают в случае, если функция g (x ) линейная. Основываясь на этом
результате, Д.Левин предложил специальное представление для интеграла
b
I ( f ) = ∫ f ( x)e iωg ( x ) dx .
a
Пусть f и g – некоторые гладкие функции. Метод Филона получается на основе
аппроксимации функции f (x) полиномом p(x) степени меньше, либо равной v1 в узловых точках с1 , c 2 ,..., cv и вычислении интеграла вида:
b
I ( f ) = ∫ p( x)e iωg ( x ) dx .
*
a
Суть метода Левина состоит в том, что если функция f представима в
виде
f ( x) = φ ′( x) + iωg ′( x)φ ( x) ≡ L(1)φ ( x), a ≤ x ≤ b ,
то интеграл может быть определен следующим образом:
b
I ( f ) = ∫ (φ ′( x) + iωg ′( x)φ ( x))e iωg ( x ) dx = φ (b)e iωg (b ) − φ (a)e iωg ( a ) .
a
Выберем полином φ (x) степени меньше, либо равной v-1 такой, чтобы
выполнялось
φ ′(с j ) + iωg ′(с j )φ (с j ) = f (с j ), j = 1, 2, 3,..., v
и вычислим
b
I L ( f ) = ∫ (φ ′( x) + iωg ′( x)φ ( x))e iωg ( x ) dx = φ (b)e iωg (b) − φ (a)e iωg ( a ) .
a
Методы Левина и Филона идентичны для произвольно выбранных узлов
интерполирования с1 , c2 ,..., cv на отрезке [a, b] и некоторой гладкой функции
f (x) для интегралов вида:
b
∫ f ( x )e
iωAx
dx ( A ≠ 0) .
a
Методы Филона и Левина одинаковы, когда степень интерполяции больше или
равна 3. Если g (x) нелинейная функция, то два метода не будут являться
идентичными. Проблема точности этих методов решена.
3.3. Обращение преобразования Лапласа методом Дурбина
Пусть p = α + iω , тогда обратное преобразование Лапласа запишется в
виде:
12
f (0) =
e αt
∞
⎡−
⎤
+
Re
f
(
α
i
ω
)
⎢
⎥ dω ,
π ∫0 ⎣
⎦
1
(4)
∞
⎧ ⎡−
⎫
⎤
⎡−
⎤
+
−
+
Re
f
(
α
i
ω
)
cos
ω
t
Im
f
(
α
i
ω
)
sin
ω
t
(5)
⎨
⎬dω , t > 0.
⎢
⎥
⎢
⎥
π ∫0 ⎩ ⎣
⎦
⎣
⎦
⎭
В работе (Durbin F., 1974) разработан численный метод для вычисления
таких интегралов:
∞ ⎧
−
⎡−
2eαt
1
2π ⎤
2π
− Re f (α ) + ∑ ⎨Re ⎢ f (α + ik )⎥ cos k
f (t ) ≈
t−
T
T
T
2
⎦
⎣
k = 0⎩
(6)
−
⎡
2π ⎤
2π ⎫
− Im⎢ f (α + ik )⎥ sin k ⎬ .
T ⎦
T ⎭
⎣
Формула (6) допустима на интервале [0,T] и формально эквивалентна
применению формулы трапеций к (4) и (5) с шагом интегрирования 2π / T .
Практически бесконечный ряд можно просуммировать только N раз. Для
короткого временного интервала обращения этот метод всегда дает хорошие
результаты, т.к. его точность на таком интервале зависит от больших значений
параметра p = α + iω , а они достигаются за счет малости T. Однако обращение
на длинном временном интервале может стать неустойчивым. Решение зависит,
главным образом, от начального значения p . Для более точной оценки
исходных интегралов следует брать малый шаг интегрирования на начальном
промежутке, близком к нулю. Для достижения хорошей точности на длинном
временном интервале при равномерном разбиении придется использовать
большое количество точек интегрирования для хорошего уплотнения
f (t ) =
−
окрестности нуля. Функция изображения f ( p) = O( p − m ),| p |→ ∞, m > 0 . Это
свойство позволяет использовать различные шаги интегрирования для того,
чтобы численно вычислять интегралы. Может быть достигнута хорошая
точность при малом количестве отрезков разбиения.
3.3.1. Алгоритм
трансформанты
метода
Дурбина
с
аппроксимацией
Рассмотрим формулы метода Дурбина, представленные в работе Zhao X.
(2004). Выберем некоторое большое R, тогда несобственные интегралы (4) и (5)
можно записать в виде:
R
⎤
⎡−
1
f (0) = lim ∫ Re ⎢ f (α + iω )⎥ dω ,
π R →∞ 0 ⎣
⎦
13
e αt
R
⎧ ⎡−
⎫
⎤
⎡−
⎤
lim ∫ ⎨Re ⎢ f (α + iω )⎥ cos ωt − Im⎢ f (α + iω )⎥ sin ωt ⎬dω , t > 0.
π R →∞ 0 ⎩ ⎣
⎦
⎣
⎦
⎭
Разбивая промежуток [0, R] на n частей, получаем следующие аппроксимации:
f (t ) =
f ( 0) =
eαt
1
π
n ωk +1
∑∫
k =1 ωk
⎡_
⎤
Re ⎢ f (α + iω )⎥ dω ,
⎣
⎦
n ωk +1 ⎧
⎫
⎡_
⎤
⎡_
⎤
+
−
+
Re
f
(
α
i
ω
)
cos(
ω
t
)
Im
f
(
α
i
ω
)
sin(
ω
t
)
⎨
⎬dω , t > 0.
∑
⎢
⎥
⎢
⎥
π k =1 ω∫ ⎩ ⎣
⎦
⎣
⎦
⎭
k
На отрезке [ω k , ω k +1 ] аппроксимируем отдельно реальную и мнимую
f (t ) =
_
части функции f (α + iω ) . Использование линейной интерполянты дает
следующие формулы:
n
⎡ (F − Fk )Δ k ⎤
f ( 0 ) ≈ ∑ ⎢ k +1
⎥,
2
π
⎣
⎦
k =1
eα t
n
⎡ Fk +1 − Fk
(cos (ω k +1t ) − cos (ω k t )) +
∑⎢
π t 2 k =1 ⎣ Δ k
⎤
G − Gk
(sin (ωk +1t ) − sin (ωk t ))⎥.
+ k +1
Δk
⎦
Использование квадратичной интерполянты позволяет записать:
_
1
1
Re[ f (α + iω )] ≈ Fk + ( Z k +1 + Z k )(ω − τ k ) +
( Z k +1 − Z k )(ω − τ k ) 2 ,
2
2Δ k
f (t ) ≈
_
(7)
1
1
Im[ f (α + iω)] ≈ Fk + (Yk +1 + Yk )(ω − τ k ) +
(Yk +1 − Yk )(ω − τ k ) 2 ,
(8)
2
2Δ k
Fk = Re[ f (α + iτ k )],
где
Δ k = ω k +1 − ω k ,
τ k = (ω k +1 + ω k ) / 2,
Gk = Im[ f (α + iτ k )].
Коэффициенты Z k определяются равенствами:
3Δ1Z1 + Δ1Z 2 = 8( F1 − F0 ),
Δ k −1Z k −1 + 3(Δ k + Δ k −1 ) Z k + Δ k Z k +1 = 8( Fk − Fk −1 ),
3Δ n Z n +1 + Δ n Z n = 8( Fn +1 − Fn ),
−
−
где F0 = Re[ f (α + iω1 )] , Fn+1 = Re[ f (α + iω n+1 )] и k = 2, 3, …, n.
Коэффициенты Yk определяются равенствами:
3Δ1Y1 + Δ1Y2 = 8(G1 − G0 ),
Δ k −1Yk −1 + 3( Δ k + Δ k −1 )Yk + Δ k Yk +1 = 8(G k − G k −1 ),
3Δ n Yn +1 + Δ nYn = 8(G n +1 − G n ),
−
−
где G0 = Im[ f (α + iω1 )] , Gn +1 = Im[ f (α + iω n+1 )] .
14
Из (7) и (8) получаем итоговые формулы численного метода:
Δ
1 n ⎡
⎤
(9)
f (0) ≈ ∑ ⎢ Fk + k ( Z k +1 − Z k ) ⎥Δ k ,
π k =1 ⎣
24
⎦
n
eα t ⎧⎪ 1
1
1
[( Z k +1 − Z k )(sin ω k +1t − sin ω k t ) +
f (t ) ≈
⎨ g1 ( t ) + 2 g 2 (t ) − ∑ 3
π ⎪⎩ t
Δ
t
t
k =1
k
(10)
⎫
+ (Yk +1 − Yk )(cos ω k +1t − cos ω k t ) ] ⎬,
⎭
1
⎡
⎤
где g 2 (t ) = − Z 1 + Z n +1 cos ω n +1t − Yn +1 sin ω n +1t , g1 (t ) = ⎢ Fn + ( Z n + 3Z n +1 )Δ n ⎥ ×
8
⎣
⎦
1
1
⎡
⎤
× sin ω n +1t + (Y2 + 3Y1 )Δ1 − G1 + ⎢Gn + (Yn + 3Yn +1 )Δ n ⎥ cos ω n +1.
8
8
⎣
⎦
4
Ошибка формул (9), (10) имеет порядок O(Δ max ) .
3.3.2. Комбинированные формулы метода Дурбина
Классический метод Дурбина использует при интегрировании по
формуле трапеций постоянный шаг, однако можно воспользоваться методом
трапеций с переменным шагом.
Модификация метода Дурбина на основе формул трапеций с
переменным шагом для всей подынтегральной функции
Базовая формула метода Дурбина на основе метода трапеций с
переменным шагом для всей подынтегральной функции выглядит следующим
образом:
∞
( f (α + iω k ) + f (α + iω k +1 ) )
f (0 ) = ∑
Δk ,
2π
k =1
itω
itω
e αt ∞ ( f (α + iω k )e k + f (α + iω k +1 )e k +1 )
f (t ) ≈
Δk .
∑
π k =1
2
Как описывалось раньше, при интегрировании возникают интегралы от
сильно осциллирующих функций, их можно считать по комбинированной
формуле.
Модификация на основе формул интегрирования сильно
осциллирующих функций с линейной аппроксимацией функции f (α + iω )
С учетом того, что f (α + iω )e itω может быть сильно осциллирующей
функцией, построим модификации метода с учетом формул интегрирования
таких функций. Комбинированная формула на основе линейной аппроксимации
функции f (α + iω ) выглядит следующим образом:
15
⎧ sin w w cos w − sin w
±
i, при w > w2 ,
⎪
2
w = t (ω k +1 − ω k ) / 2 , D1, 2 ( w) = ⎨ w
w
⎪e m wi ,
при w ≤ w2 ,
⎩
1 ∞ f (α + iω k ) + f (α + iω k +1 )
f (0) ≈ ∑
Δk ,
π k =1
2
(11)
eαt ∞ Δ k it (ωk +ωk +1 ) / 2
[D1 ( w) f (α + iω k ) + D2 ( w) f (α + iω k +1 )] .
f (t ) ≈
∑ e
π k =1 2
Модификация на основе формул интегрирования сильно
осциллирующих функций с квадратичной аппроксимацией функции
f (α + iω )
Модификация метода выглядит следующим образом:
w = t (ω k +1 − ω k ) / 2 ,
⎧
2ie iw + we iw + 3we −iw − 2ie −iw + 2w 2 ie −iw
,
⎪ D1 =
3
w
2
⎪⎪
при w > w3 ⎨ D2 = 2 − ie iw − we iw + ie −iw − we −iw / w 3 ,
⎪
− 3we iw − 2ie iw + 2w 2 ie −iw + 2ie −iw − we −iw
D
,
=
−
⎪ 3
3
⎪⎩
2w
⎧ D1 = e − wi / 2,
⎪
при w ≤ w3 ⎨ D2 = 1,
⎪
wi
⎩ D3 = e / 2.
− ωk )
(ω
1 ∞ ⎡
,
f (0) ≈ ∑ ⎢ f (α + ω k ) + 2 f (α + ω k + 1 ) + f (α + ω k +1 )⎤⎥ k +1
π k =1 ⎣
2
⎦
2
(
eαt
f (t ) ≈
π
)
∞
∑ (ωk +1 − ωk )eit (ω
k
+ ω k +1 ) / 2
k =1
(12)
1
[D1 (w) f (α + ωk ) +
2
+ D2 ( w) f (α + ω k + 1 ) + D3 ( w) f (α + ω k +1 )⎤⎥.
⎦
2
Возможности модификаций метода Дурбина продемонстрированы на
численных примерах (аналитическое решение задачи о действии скачка
давления на торец составного призматического тела).
3.3.3. Численное обращение преобразования Лапласа на основе
метода Дурбина
Рассмотрим следующее изображение:
16
(
)
∞
F ⎡ − (l − y ) p / c
−(l + y ) p / c 1 ⎤
n − 2 nlp / c
e
−
e
,
⎢
⎥ ∑ (−1) e
2
ρc ⎢⎣
p ⎥⎦ n =0
которое получено действием интегрального преобразования Лапласа на
функцию
F ∞
f (t ) = −
(−1) n [(t − ((2n + 1)l − y ) / с )H (t − ((2n + 1)l − y ) / с ) −
∑
ρc n=0
f ( p) = −
− (t − ((2n + 1)l + y ) / с )H (t − ((2n + 1)l + y ) / с )],
F = 1, ρ = 0,5, c = 2 , l = 3, y = 3 .
Для численных экспериментов параметр метода Дурбина выбираем один и тот
же: α = 0,2 .
Применение в численном моделировании имеющихся в литературе
вариантов метода Дурбина (Zhao X., 2004), не учитывающих специфику
интегрирования быстро осциллирующих функций, может привести к более
худшим результатам, чем использование традиционной формулы метода
Дурбина (Durbin F., 1974). Возьмем 5000 точек по частоте ω на интервале
[0, 200] . На рис. 2–3 приведены соответственно действительная и мнимая часть
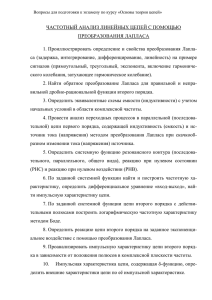
спектральной функции. На рис. 4 кривая, отмеченная цифрой 1 – это результат
использования традиционного метода Дурбина, и этот результат не отличим от
аналитической кривой. Применение вариантов метода Дурбина (Zhao X. 2004)
позволяет на этих же точках построить оригиналы искомой функции
перемещений: кривая 2 – метод с линейной аппроксимацией спектральной
функции, кривая 3 – метод с квадратичной аппроксимацией спектральной
функции. Результат демонстрирует заметное затухание, устранить которое
можно только увеличением количества точек по частоте.
Рис. 2
Рис. 3
17
1
3
1 – традиционный
метод Дурбина,
2 – модификация
Zhao с линейной
аппроксимацией,
3 – модификация
Zhao с
квадратичной
аппроксимацией.
2
Рис. 4
При увеличении частотного интервала на сохраненном числе точек или
при уменьшении числа точек по частоте с сохраненной длиной интервала могут
возникнуть еще большие неприятности с применением подхода (Zhao X. 2004).
На рис. 5–7 продемонстрировано решение той же самой задачи с 5000 точками
по частоте на интервале [0, 500 ]. Маркировка кривых цифрами принята та же.
Рис. 5
Рис. 6
Использование варианта метода Дурбина с переменным шагом не
позволяет преодолеть возникающих проблем. На рис. 8 продемонстрированы
результаты одного из таких экспериментов, когда выбрано 2000 точек по
частоте на интервале [0, 200] . Равномерные сетки строились на интервалах
[0, 40] и [40, 200] из расчета, что выбиралось по 1000 точек на каждом
интервале.
18
1 – традиционный
метод Дурбина,
2 – модификация Zhao с
линейной
аппроксимацией,
3 – модификация Zhao с
квадратичной
аппроксимацией,
1
3
2
Рис. 7
Метод Дурбина с
переменным шагом
интегрирования
Рис. 8
Использование модификаций метода Дурбина на основе формул (11),
(12) позволяет преодолеть отмеченные проблемы. На рис. 9 представлены
результаты построения на той же сетке, что и для примера на рис. 8, но с
применением формул (11) и (12). Построенные кривые по формулам (11) и (12)
совпали.
Проведенные исследования при других вариантах разбиения частотного
диапазона показали, что использование комбинированных формул (11), (12)
позволяет без потери точности понизить количество точек интегрирования в
разы. Для примера, изображенного на рис. 9, удалось понизить количество
точек интегрирования в 2,5 раза.
19
Комбинированные
формулы с линейной и
квадратичной
аппроксимацией,
w3 = 2,5 , w2 = 1,5
Рис. 9
В стремлении уменьшить число точек интегрирования приведем
результаты следующего эксперимента. На интервале ω ∈ [0, 200 ] выберем три
интервала: [0, 20] , [20, 100] , [100, 200] , на которых зададимся равномерными
сетками из расчета выбора соответственно количества точек по частоте
L1 = 500, L2 = 500, L3 = 200 . Использование комбинированной формулы
позволяет получить результаты, представленные на рис. 10 и 11.
Комбинированная
формула с
квадратичной
аппроксимацией
Рис. 10
20
Комбинированная
формула с линейной
аппроксимацией
Рис. 11
Результат использования на этой же сетке метода Дурбина с
переменным шагом интегрирования всей подынтегральной функции
представлен на рис. 12. Преимущество комбинированной формулы
продемонстрировано еще более наглядно. Подчеркнем, что удалось уменьшить
число точек интегрирования в 4 раза.
Сравнение метода
Дурбина с переменным
шагом (красная кривая) с
комбинированной
формулой
Рис. 12
Рассмотрим случай небольшого частотного интервала [0, 100 ] .
Особенность приведенного примера в том, что на числе точек L = 5000
варианты
формул
Дурбина,
построенные
Zhao
(2004),
дают
удовлетворительные результаты (рис. 13).
21
1
2
1 – метод Дурбина с
переменным шагом и
модификация Zhao с
квадратичной
аппроксимацией,
2 – модификация Zhao с
линейной
аппроксимацией
Рис. 13
Использование комбинированных формул (11), (12) на интервалах [0, 20 ] ,
[20, 100] с числом точек соответственно L1 = 1000 и L2 = 1000 позволяют
получить результаты, изображенные на рис. 14 и 15. Для обоих вариантов
параметры w2 = 0,5 и w3 = 0,5 .
Приведенный пример продемонстрировал возможности имеющихся в
литературе модификаций метода Дурбина: выбор достаточного количества
точек
позволяет
добавить
необходимой
точности.
Использование
комбинированных формул (11), (12) существенно расширяет возможности
метода Дурбина.
Комбинированная
формула с линейной
аппроксимацией, w2 = 0,5
Рис. 14
22
Комбинированная
формула с
квадратичной
аппроксимацией,
w3 = 0,5
Рис. 15
3.4. Метод квадратур сверток
Рассмотрим интеграл свертки
t
y(t ) = f (t ) * g (t ) = ∫ f (t − τ ) g (τ )dτ .
(13)
0
Особое квадратурное правило – метод квадратур сверток –,
применяемое к интегралам вида (13), было предложено Lubich C. (1988).
Интеграл свертки (13) заменяется квадратурной суммой, весовые множители
которой определяются с помощью изображения по Лапласу функции f и
линейного многошагового метода.
3.4.1. Традиционный метод квадратур сверток
Интеграл свертки (13) считается по следующему соотношению:
y ( nΔt ) =
n
∑ ω n−k (Δt ) g (kΔt ),
n = 0,1,... N ,
(14)
k =0
где
2π
⎛ γ ( Rе iϕ ) ⎞ −inϕ
(15)
∫ f ⎜⎜ Δt ⎟⎟e dϕ .
⎠
0 ⎝
Единственная аппроксимация, которая использовалась при выводе
формулы (14), заключалась в использовании линейного многошагового метода
для решения задачи Коши дифференциального уравнения первого порядка. Все
остальные вычисления проводились непосредственно. Многошаговый метод
должен быть порядка точности p ≥ 1, являясь строго нуль-устойчивым или AR −n
ω n (Δt ) =
2π
23
устойчивым, а функция f (s) ограничена в правой полуплоскости относительно
прямой (c − i∞, c + i∞) , то есть:
f ( s) ≤ K s
−μ
K < ∞ , μ > 0.
при
Если функция f (s ) аналитична и ограничена в области
arg(s − c) < π − φ ,
где φ < π / 2 , критерий устойчивости может быть ослаблен до A(α ) устойчивости.
Выражаясь в терминах характеристической функции γ (z ) , имеем:
• функция γ (z) не должна содержать нулей и полюсов внутри
замкнутого единичного круга ( z ≤ 1), за исключением однократного
нуля при z = 1 ;
• arg γ ( z ) ≤ π − α , где z ≤ 1, при
;
α
• Δt
>
φ
−1
γ (e − Δt ) = 1 + Ο( Δt p ) , где Δt → 0 при p ≥ 1.
К соответствующим примерам многошаговых методов относятся
методы дифференцирования назад порядка p ≤ 6 : для A-устойчивого метода
дифференцирования назад второго порядка (α = 90 0 ) можем записать
характеристическую функцию:
γ ( z ) = 3 2 − 2 z + z 2 2.
Из (15) на основе формулы трапеций с постоянным шагом 2π / L
получим следующую формулу для ω n ( Δt ) :
⎛ γ ( Rе il 2π / L ) ⎞ −inl 2π / L
.
(16)
∑ f ⎜⎜ Δt ⎟⎟e
l =0 ⎝
⎠
При условии того, что функция f (s ) в уравнении (16) вычисляется с некоторой
R −n
ω n (Δt ) =
L
L −1
погрешностью ε , выбор L = N и R n = ε допускает погрешность вычисления
ω n порядка Ο( ε ) .
3.4.2. Модификации метода квадратур сверток
При численной реализации метода возникает проблема получения из
(15) ω n , которая порождена следующей функцией:
⎛ γ ( Rе iϕ ) ⎞ −inϕ
⎟e
F = f⎜
.
⎜ Δt ⎟
⎝
⎠
Традиционный метод квадратур сверток использует формулу (16) с
постоянным шагом интегрирования.
24
Формула вычисления ω n с переменным шагом для всех
подынтегральных функций выглядит следующим образом:
⎛ γ ( Rе inϕ k +1 ) ⎞ −inϕ +1 ⎤ (ϕ k +1 − ϕ k )
R − n L −1 ⎡ ⎛⎜ γ ( Rе inϕ k ) ⎞⎟ −inϕ k
k
⎜
⎟e
.(17)
+
f
e
f
ω n (Δt ) =
⎢ ⎜
⎥
∑
⎟
⎜
⎟
Δt
Δ
t
2π k =0 ⎢⎣ ⎝
2
⎥⎦
⎠
⎝
⎠
Для случаев, когда f γ ( Re iϕ ) / Δt e inϕ – сильно осциллирующая
функция, в сочетании с (17) оправдано использовать комбинированную
формулу, учитывающую специфику интегрирования таких функций.
Модификация на основе формул интегрирования сильно
осциллирующих функций с линейной аппроксимацией функции
f γ ( Rе inϕ ) / Δt
Модификация метода выглядит следующим образом:
(
)
(
R−n
ω n (Δt ) =
2π
L −1ϕ k +1
∑∫
k =1 ϕ k
)
⎛ γ ( Rе inϕ ) ⎞ − inϕ
R−n
⎜
⎟
f
e
dϕ =
⎜
⎟
2π
t
Δ
⎝
⎠
L −1
∑
ϕ k +1 − ϕ k
k =1
2
×
(18)
⎡
⎛ γ ( Rе
⎛ γ ( Rе
) ⎞⎟
) ⎞⎟⎤
× e − in (ϕ k +ϕ k +1 ) / 2 ⎢ D1 ( w) f ⎜
+ D2 ( w) f ⎜
⎜
⎟
⎜
⎟⎥
t
t
Δ
Δ
⎢⎣
⎝
⎠
⎝
⎠⎥⎦
⎧ sin w w cos w − sin w
±
i при w > w2 ,
ϕ k +1 − ϕ k
⎪
w2
w = −n
, D1, 2 ( w) = ⎨ w
2
⎪e m wi
при w ≤ w2 .
⎩
Модификация на основе формул интегрирования сильно
осциллирующих функций с квадратичной аппроксимацией функции
f γ ( Rе inϕ ) / Δt
Модификация метода выглядит следующим образом:
ϕ
R − n L −1 k +1 ⎛⎜ γ ( Rеinϕ ) ⎞⎟ −inϕ
ωn (Δt ) =
dϕ =
∑ f
⎟e
2π k =1 ϕ∫ ⎜⎝ Δt
⎠
k
(19)
in
ϕ
− n L −1
k
⎡
⎛ γ ( Rе
ϕk +1 − ϕk −in (ϕ k +ϕ k +1 ) / 2
) ⎞⎟
R
=
+
e
⎢ D1 ( w) f ⎜⎜
∑
⎟
Δ
2π k =1
2
t
⎢⎣
⎝
⎠
in
ϕ
⎞
⎛
k+ 1
2
⎛ γ ( Rеinϕ k +1 ) ⎞ ⎤
)⎟
⎜ γ ( Rе
⎟ ⎥,
+ D3 ( w) f ⎜
+ D3 ( w) f ⎜
⎟
⎜
⎟ ⎦
t
t
Δ
Δ
⎟
⎜
⎝
⎠
⎠
⎝
inϕ k
(
inϕ k +1
)
w = − n(ϕ k +1 − ϕ k ) / 2 ,
25
⎧
2ie iw + we iw + 3we −iw − 2ie −iw + 2 w 2 ie −iw
,
D
=
⎪ 1
3
2w
⎪⎪
iw
iw
при w > w3 ⎨ D2 = 2 − ie − we + ie −iw − we −iw / w 3 ,
⎪
− 3we iw − 2ie iw + 2w 2 ie −iw + 2ie −iw − we −iw
,
⎪ D3 = −
⎪⎩
2w3
⎧ D1 = e − wi / 2,
⎪
при w ≤ w3 ⎨ D2 = 1,
⎪
wi
⎩ D3 = e / 2.
Теоретическую
оправданность
комбинированных
формул
продемонстрируем на численных примерах.
(
)
3.4.3. Численные результаты на основе метода квадратур сверток
Рассматривается решение задачи о действии скачка давления на торец
призматического тела. Изображения и оригиналы функций перемещений
следующие:
2⎤
− (l + y ) γ ( Rе inϕ ) ⎞
− 2 nl γ ( Rе inϕ )
⎡⎛ − (l − y ) γ ( Rе inϕ )
in
ϕ
∞
F ⎜
⎟ ⎛⎜ γ ( Rе ) ⎞⎟ ⎥
Δt
Δt
Δt
,
/⎜
(−1) n e c
υ (ϕ ) = − ⎢⎜ e c
−e c
∑
⎟
⎟
⎥
ρc ⎢⎜
t
Δ
⎟ ⎝
⎠ ⎥⎦ n = 0
⎢⎣⎝
⎠
F ∞
υ (t ) = − ∑ (−1) n [(t − ((2n + 1)l − y ) / с )H (t − ((2n + 1)l − y ) / с ) −
ρc n = 0
− (t − ((2n + 1)l + y ) / с )H (t − ((2n + 1)l + y ) / с )],
F = 1, ρ = 0,5, c = 2 , l = 0,3,
Рис. 16
y = 0,3 .
Рис. 17
На рис. 16–17 приведены графики спектральных функций для
следующих параметров схемы: N = 500 , Δt = 0,01 , L = 500 . На рис. 18
26
представлены оригиналы искомых функций. Цифрой 1 обозначена кривая,
построенная по традиционной формуле метода квадратур сверток, цифрами 2 и
3 – кривые, построенные по результатам применения модификации метода с
линейным и квадратичным интерполированием функции f γ ( Re iϕ ) / Δt , когда
интеграл от экспоненты, входящей под интеграл, считается аналитически.
Применение метода квадратур сверток с переменным шагом при
линейной интерполяции подынтегральной функции не позволяет решить
проблему устойчивости численного построения искомой функции на
выбранном временном интервале без измельчения расчетной сетки. На рис. 19–
20 представлены соответственно действительная и мнимая часть спектральной
функции при следующих параметрах схемы: N = 500 , Δt = 0,01 и
использование равномерных сеток на интервалах [0, π / 2], [π / 2, 3π / 2],
[3π / 2, 2π ] из расчета выбора соответственно L = 125 , L = 21 и L = 125 . На рис.
35 показано возникновение численных осцилляций.
(
)
2
1 – традиционный
метод квадратур
сверток
2 – модификация
метода с линейной
аппроксимацией
функции f γ ( Re iϕ ) / Δt
3 – модификация
метода с квадратичной
аппроксимацией
функции f γ ( Re iϕ ) / Δt
1
3
(
)
(
)
Рис. 18
Рис. 19
Рис. 20
27
Применение комбинированных формул (18), (19) позволяет получить
искомый результат на той же сетке (гладкая кривая на рис. 21). Кривые по
формулам (18) и (19) неразличимы. В численных экспериментах полагалось,
что в формуле (18) w2 = 3 , а в формуле (19) w3 = 6 .
Использование модификаций позволяет сократить необходимое число
точек разбиения для достижения заданной точности. В рассмотренном примере
удалось понизить число точек в 2 раза, а при уменьшении шага по времени
число точек еще больше сократится, т.к. информативная часть функции f при
уменьшении шага по времени будет уплотняться к точкам 0 и 2π (приведен
пример с уменьшением количества точек в 3 раза).
Построение модификаций метода квадратур сверток на основе
комбинированных формул (18), (19) позволило преодолеть такие ограничения
традиционного подхода, как выбор в компьютерном моделировании числа
шагов N по времени, совпадающего с числом узлов L по углу ϕ .
Гладкая кривая –
комбинированная
формула с линейной и
квадратичной
аппроксимацией,
параметры w2 = 3 и
w3 = 6 ;
Осциллирующая кривая
– метод трапеций с
переменным шагом
Рис. 21
В качестве новой рекомендации следует отметить: узлы по углу ϕ ,
построенные на основе условия L = N , должны сохраняться на граничных
участках интервала [0;2π ] : ϕ ∈ [0; ϕ1 ] и ϕ ∈ [ϕ 2 ;2π ] . Углы ϕ1 и ϕ 2
определяются подбором. Если не придерживаться сформулированной
рекомендации, то возможно получение неправильного результата. Приведем
пример. Пусть число N = 500, Δt = 0,01 , а на отрезке [0;2π ] выбрано L = 141
точек из условия, что L1 = 70 на отрезке [0; π / 2], L2 = 21 на отрезке
[π / 2; 3π / 2] и L3 = 70 на отрезке [3π / 2; 2π ] . Точки на отрезках расположены
равномерно. Результат, построенный на основе формулы трапеций с
переменным шагом, приведен на рис. 22. Результат, построенный на основе
комбинированных формул, приведен на рис. 23.
28
Метод квадратур сверток
на основе метода
трапеций с переменным
шагом
Рис. 22
Комбинированная
формула с линейной и
квадратичной
аппроксимацией (кривые
совпали), параметры
w2 = 5,9 и w3 = 11,6 .
Рис. 23
Различий
между
линейной
и
квадратичной
модификацией
комбинированной формулы нет.
Приведем пример, демонстрирующий возможности применения
комбинированных формул, когда шаг по времени уменьшен. Пусть
N = 2000, Δt = 0,0025 . Применение традиционного метода квадратур сверток
при L = 2000 дает результат, представленный кривой 2 на рис. 24, а кривой 1
представлен результат при следующих параметрах: N = 500, Δt = 0,01 , L = 500 .
29
1
2
Традиционный метод
квадратур сверток
1 – N = 500 , Δt = 0,01 ,
L = 500, ϕ ∈ [0 ÷ 2π ] ,
2 – N = 2000 ,
Δt = 0,0025 ,
L = 2000, ϕ ∈ [0 ÷ 2π ]
Рис. 24
Применение комбинированных формул на интервалах [0; π / 3] ,
[π / 3; 5π / 3] , [5π / 3; 2π ] из расчета заданных равномерных сеток соответственно
дают
результат,
для
следующих
точек
L1 = 333, L2 = 41, L3 = 333
представленный гладкой кривой на рис. 25. На таких же точках построены
результаты на основе метода трапеций с переменным шагом, и этот результат
приведен на рис. 25 в виде осциллирующей кривой.
Гладкая кривая –
комбинированная
формула с линейной и
квадратичной
аппроксимацией,
параметры w2 = 3,1 и
w3 = 6,1 ;
Осциллирующая кривая –
метод трапеций с
переменным шагом
Рис. 25
3.5. Шаговый метод обратного преобразования Лапласа
Метод квадратур сверток близок к шаговому методу обращения
преобразования Лапласа. Но если метод квадратур сверток основан на
30
теореме о свертке двух оригиналов, то шаговый метод обращения
преобразования Лапласа основан на теореме об интегрировании оригинала.
Рассмотрим интеграл:
t
y(t ) = ∫ f (τ )dτ .
0
Интеграл считается по следующему соотношению:
y (0) = 0,
y ( nΔt ) = y (( n − 1) Δt ) + ω n ( Δt ), n = 1,... N ,
где
R −n
ω n (Δt ) =
2π
2π
∫ f ( p ) pe
−inϕ
dϕ ,
0
p=
γ ( Rе iϕ )
Δt
(20)
.
Приближение, которое используется при выводе формулы (20), как и в
методе квадратур сверток заключается в использовании линейного
многошагового метода для решения задачи Коши дифференциального
уравнения первого порядка. Метод должен быть порядка точности p ≥ 1 ,
являясь строго нуль-устойчивым или A-устойчивым, а функция f (s) ограничена
в правой полуплоскости относительно прямой (c − i∞, c + i∞) , то есть:
f ( s) ≤ K s
−μ
при
K < ∞ , μ > 0.
Если функция f (s ) аналитична и ограничена в области
arg(s − c) < π − φ ,
φ < π , критерий устойчивости может быть ослаблен до
A(α ) −
2
устойчивости.
Выражаясь в терминах характеристической функции γ (z ) , имеем:
• функция γ (z) не должна содержать нулей и полюсов внутри
замкнутого единичного круга ( z ≤ 1), за исключением однократного
нуля при z = 1,
• arg γ ( z ) ≤ π − α , где z ≤ 1, при α > φ ,
где
• Δt
−1
γ (e − Δt ) = 1 + Ο( Δt p ) , где
при p ≥ 1.
На основе методов дифференцирования назад порядка p ≤ 6 можно
построить необходимую характеристическую функцию. Для A-устойчивого
(α = 90 0 )
метода
дифференцирования
назад
второго
порядка
характеристические функции имеют вид:
γ ( z ) = 1 − z , γ ( z ) = 3 2 − 2 z + z 2 2.
Следующая аппроксимация, которая используется при создании метода
– численное интегрирование при получении значений ω n ( Δt ) . Если применить
аппроксимации с L равными шагами 2π L , то искомый вид ω n ( Δt ) будет
следующий:
Δt → 0
31
R −n
ω n (Δt ) =
L
L −1
∑ f ( p ) pe
l =0
−inl 2Lπ
,
p=
γ ( Rе
il 2Lπ
Δt
)
.
(21)
При условии того, что функция f (s ) в уравнении (21) вычисляется с
некоторой погрешностью ε , выбор L = 2 N и R N = ε допускает погрешность
вычисления ω n порядка Ο( ε ) .
32
Литература
1. Баженов В.Г., Белов А.А., Игумнов Л.А. Гранично-элементное
моделирование динамики кусочно-однородных сред и конструкций:
Учебное пособие. – Н.Новгород: Изд-во ННГУ, 2009. – 180 с.
2. Баженов В.Г., Игумнов Л.А. Метод граничных элементов в трехмерной
динамической теории упругости и вязкоупругости с сопряженными
полями: Учебное пособие. – Н.Новгород: Изд-во ННГУ, 2007. – 328 с.
3. Баженов В.Г., Игумнов Л.А. Методы граничных интегральных уравнений
и граничных элементов в решении задач трехмерной динамической
теории упругости с сопряженными полями. – М.: Физматлит, 2008. –
352 с.
4. Бахвалов, Н.С. Численные методы / Н.С. Бахвалов, Н.П. Жидков, Г.М.
Кобельков – М.: Бином. Лаборатория знаний, 2006. – 636 с.
5. Durbin, F. Numerical inversion of Laplace transforms: an efficient
improvement to Dubner and Abate’s method / F. Durbin // The Computer
Journal. – 1974. – Vol.17, 4. – P. 371–376.
6. Iserles A. On the numerical quadrature of highly-oscillatting integrals II:
irregular oscillators transforms, IMA J. Numer. Anal. – 2005. – №25. – P.2544.
7. Iserles A., Norsett S.P. Efficient quadrature of highly-oscillatory integrals
using derivatives, Proc. Roy. Soc. A. – 2005. – №461. – P.1383-1399.
8. Kompis V. Selected topics in boundary integral formulations for solids an
fluids. – Berlin: Springer, 2002. – 232 p.
9. Levin D. Analysis of a collocation method for integrating rapidly oscillatory
functions // J. Coniput. Appl. Math. –1997. – № 78. – P. 131-138.
10. Levin D. Procedures for computing one-and-two dimensional integrals of
functions with rapid irregular oscillations, Math. Comput. – 1982. – № 38. –
P. 531-538.
11. Lubich, C. Convolution quadrature and discretized operational calculus. I. / C.
Lubich // Numer. Math. – 1988. – № 52. – P. 129–145.
12. Lubich, C. Convolution Quadrature and Discretized Operational Calculus. II. /
C. Lubich // Numerische Mathematik. – 1988. – № 52. – P. 413-142.
13. Zhao X. An efficient approach for the numerical inversion of Laplace
transform and its application in dynamic fracture analysis of a piezoelectric
laminate. // Int.J. of Solids and Structures. – 2004. – V. 41. – P. 3653–3674.
33
Александр Александрович Белов
Леонид Александрович Игумнов
Светлана Юрьевна Литвинчук
ЧИСЛЕННОЕ ОБРАЩЕНИЕ
ПРЕОБРАЗОВАНИЯ ЛАПЛАСА
Учебно-методическое пособие
Государственное образовательное учреждение высшего
профессионального образования «Нижегородский государственный
университет им. Н.И. Лобачевского».
603950, Нижний Новгород, пр. Гагарина, 23.
34