моделирование издержек производства при реорганизации
реклама

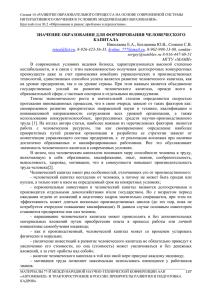
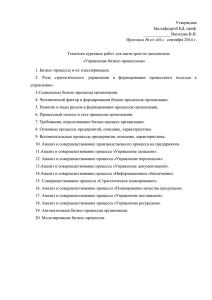
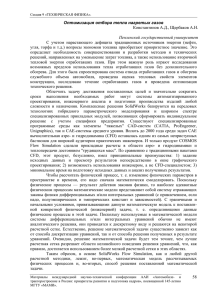
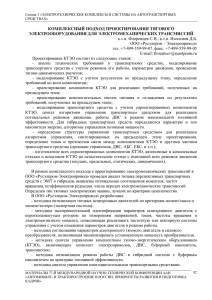
Секция 12 «МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ И БИЗНЕС-ПРОЦЕССОВ В ПРОМЫШЛЕННОСТИ» МОДЕЛИРОВАНИЕ ИЗДЕРЖЕК ПРОИЗВОДСТВА ПРИ РЕОРГАНИЗАЦИИ БИЗНЕС-ПРОЦЕССОВ Абрамова А.Р., к.э.н., доц. Платко А.Ю. МГТУ «МАМИ» [email protected], (495)223-05-23, доб.1451 Постановка проблемы. Одна из главных задач реинжиниринга — добиться снижения себестоимости и рисков организации. Одним из главных методов оптимального распределения ресурсов и учета издержек предприятий является линейное программирование. При этом применение подобного рода инструментов управления предприятием требует серьезных знаний в области математического моделирования и профессиональной подготовки. Попытки сохранения сложившейся системы управления компанией, не адаптированной к изменяющимся эндогенным и экзогенным факторам, как правило, не дают ощутимых результатов в плане оптимизации издержек. Под бизнес-процессом понимают совокупность взаимосвязанных операций (работ) по изготовлению готовой продукции или выполнению услуг на основе потребления ресурсов. Управление бизнес-процессами нацелено на выполнение качественного обслуживания потребителей (клиентов). При этом в ходе управления бизнес-процессами все материальные, финансовые и информационные потоки рассматриваются во взаимодействии (рисунок 1). Клиент Оформить заказ Закупить материалы Выполнить заказ Выдать заказ База данных Материальные и финансовые потоки Информационные потоки Рисунок 1 - Структура бизнес-процесса Руководитель предприятия в период реорганизации бизнес-процессов неминуемо сталкивается с проблемой перераспределения ресурсов и создания условий для увеличения финансовых результатов, в частности рентабельности. Для решения поставленной задачи рассмотрим модель линейного программирования, ориентированную на оптимизацию распределения собственных ресурсов предприятия. С теоретических позиций математическая модель – это условный совокупный образ объекта в виде совокупности уравнений, неравенств, логических соотношений, созданный для получения новых знаний, исследования объекта, анализа и оценки принимаемых решений в конкретных или возможных ситуациях. В модели целесообразно выделить следующие элементы: исходные данные, зависимости, описывающие целевую функцию, ограничения, то элементы математических моделей могут быть представлены схемой (рисунок 2). МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 1 Секция 12 «МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ И БИЗНЕС-ПРОЦЕССОВ В ПРОМЫШЛЕННОСТИ» Элементы модели Нелинейные Зависимости Линейные Дискретные Искомые переменные Непрерывные Случайные Детерминированные Исходные данные Рисунок 2 - Разновидности элементов математической модели По целям моделирования и используемому инструментарию модели подразделяются на теоретические и прикладные, оптимизационные и равновесные. Прикладные модели обеспечивают возможность оценки параметров функционирования конкретных техникоэкономических объектов и обоснования выводов для принятия управленческих решений. Равновесные модели, присущие рыночной экономике, а также нерыночной, где равновесие по одним параметрам компенсируется другими факторами, описывают поведение субъектов хозяйствования в стабильных устойчивых состояниях. Оптимизационные модели связаны в основном с микроуровнем и предполагают выбор наилучшего варианта по некоторому критерию: максимум прибыли, минимизация расходов, минимум отходов производства и т.д. В данной статье в качестве объекта исследования выбран завод ММЗ ОАО «Вперёд», осуществляющий производство рулевых винтов и лопастей для вертолетов семейства Ми; воздушных винтов и лопастей для легкомоторных, спортивных и деловых самолетов; мобильных ветроэнергетических комплексов и других видов продукции. Работа выполнена по материалам, предоставленным заводом ММЗ ОАО «Вперёд» и в интересах завода-производителя. Постановка задачи. Необходимо определить оптимальный объем выпуска основных видов продукции (винтов P1 и лопастей P2 для военных вертолетов) и максимальную рентабельность предприятия после проведения реинжиниринга бизнес-процессов в условиях наличия дефицитных ресурсов Si. Под S1 будем понимать затраты электроэнергии, образованные посредством введения в эксплуатацию собственного генератора, а под S2 – трудовые ресурсы. При подсчете рентабельности будем учитывать лишь чистую прибыль предприятия (часть прибыли, остающаяся в распоряжении предприятия после уплаты налогов и внесения других обязательных платежей, то есть издержки производства). Данные, необходимые для решения задачи, приведены в таблице 1 (в расчете на тысячу изделий): Таблица 1. Исходные данные по предприятию ММЗ ОАО «Вперед» Ресурсы S1 S2 Удельные затраты на Прибыль от реализации производство Нормы расхода сырья (в млн. руб.) Продукция (в млн. руб.) (в тыс. руб.) МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 2 Секция 12 «МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ И БИЗНЕС-ПРОЦЕССОВ В ПРОМЫШЛЕННОСТИ» P1 P2 Запасы ресурсов (тыс. руб.) 1,8 2,55 0,01 0,2 1,2 0,04 20 45 0,012 0,008 Условно-постоянные затраты – 1,0 (в млн. руб.) Первый способ решения задачи. Обозначения x1 и x2 соответственно объемы выпуска изделий первого и второго видов (в тыс. штук). Таким образом, чистая прибыль от реализации этих изделий составит: 0,012 x1 +,008x2 млн. руб., а затраты на производство будут равны 0.01x1 + 0.04 x2 + 1млн. руб. Рентабельность вычисляется по формуле: 0.012 x1 + 0.008 x 2 z= 0.01x1 + 0.04 x 2 + 1 Ограничения по затратам электроэнергии и трудовых ресурсов запишем в виде неравенств: 1.8 x1 + 0.2 x 2 ≤ 20, 2.55 x1 + 1.2 x 2 ≤ 45 Учитывая неотрицательность переменных x1 и x 2 , а также рентабельность и ограничения по затратам, получаем задачу дробно-линейного программирования: 0.012 x1 + 0,008 x 2 → max z= 0,01x1 + 0,04 x 2 + 1 1,8 x1 + 0,2 x 2 ≤ 20, x1 ≥ 0, 2,55 x1 + 1,2 x 2 ≤ 45, x 2 ≥ 0 Сведем ее к задаче линейного программирования. Обозначим знаменатель функции 1 цели через v : 1 0,01x1 + 0,04 x 2 + 1 = . v Так как v f 0, то мы имеем право умножить на него обе части каждого неравенства в системе ограничений. При этом смысл неравенств сохраняется. Подвергнем такому же преобразованию предыдущее уравнение. Это позволит записать систему ограничений в таком виде: 1.8 x1v + 0.2 x 2 v ≤ 20v, 2.55 x v + 1.2 x v ≤ 45v, 1 2 0.01x1v + 0.04 x 2 v + v = 1 x1 ≥ 0, x 2 ≥ 0, v f 0 С учетом полученного уравнения преобразуем функцию цели: МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 3 Секция 12 «МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ И БИЗНЕС-ПРОЦЕССОВ В ПРОМЫШЛЕННОСТИ» z = 0.012 x1v + 0.008x 2 v. Введем новые переменные: y1 = x1v; y 2 = x2 v. Окончательная задача запишется так: z = 0.012 y1 + 0.008 y 2 → max 1.8 y1 + 0.02 y 2 − 20v ≤ 0, 2.55 y + 1.2 y − 45v ≤ 0, 1 2 0.01y1 + 0.04 y 2 + v = 1, y1 ≥ 0, y 2 ≥ 0, v f 0 Это задача линейного программирования. Решим ее. Прежде всего, исключим переменную ν из первых двух ограничений. Для этого к первому неравенству прибавим третье ограничение, умноженное на 20, а ко второму неравенству прибавим это уравнение, умноженное на 45. Система ограничений примет вид: 2 y1 + 2 y 2 ≤ 20, 3 y1 + 3 y 2 ≤ 45, 0.01y + 0.04 y + v = 1 1 2 Из уравнения выразим ν через y1 и y 2 : v = 1 − 0.01y1 − 0.04 y 2 . Теперь мы можем отбросить положительное ν в третьем ограничении. Баланс нарушается. Уравнение заменится неравенством. В результате проведенных преобразований получим задачу линейного программирования с ограничениями-неравенствами, содержащую всего две переменные y1 и y 2 . z = 0.012 y1 + 0.008 y 2 → max 2 y1 + y 2 ≤ 20, y1 ≥ 0, 3 y1 + 3 y 2 ≤ 45, y 2 ≥ 0, 0.01y + 0.04 y p 1 1 2 Эту вспомогательную задачу решим графически. Для построения граничных прямых используем, например, следующие пары точек (рисунок 3): (l1 ) 2 y1 + y 2 = 20, M 1 (0;20) ∈ l1 , M 2 (10;0) ∈ l1. , (l 2 ) 3 y1 + 3 y 2 = 45, N1 (0;15) ∈ l 2 , N 2 (15;0) ∈ l 2 , (l 3 ) 0.01y1 + 0.04 y 2 = 1, K 1 (0;25) ∈ l 3 , K 2 (20;20) ∈ l3 . МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 4 Секция 12 «МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ И БИЗНЕС-ПРОЦЕССОВ В ПРОМЫШЛЕННОСТИ» y2 25 K1 K2 20 l2 l3 M1 N1 B 10 __ n M2 10 O N2 15 l1 l0 y1 20 l2 Рисунок 3 – Область допустимых решений Область допустимых решений системы ограничения имеет вид четырехугольника __ ON1 BM 2 . Нормаль к опорной прямой l 0 представлена вектором n = (3;2). Этот вектор, __ очевидно коллинеарен вектору n 0 = (0.012;0.008), который неудобен для изображения. Для задачи на максимизацию функции цели оптимальное решение находится в точке выхода из области допустимых решений. Это точка В. Найдем ее координаты. С этой целью решим систему, составленную из уравнений прямых I и II: 2 y1 + y 2 = 20, 3 y1 + 3 y 2 = 45. Решив эту систему, найдем y1 = 5, y 2 = 10. Получим: y опт. = (5;10) и z max = 0.012 ⋅ 5 + 0.008 ⋅ 10 = 0.06 + 0.08 = 0.14 = 14% . Вспомогательная задача решена. Воспользуемся формулами перехода для отыскания __ x опт . Прежде всего определим величину v = 1 − 0.01y1 − 0.04 y 2 = 1 − 0.01 ⋅ 5 − 0.04 ⋅ 10 = 0.55. Теперь найдем x1 и x 2 : x1 = y1 y 5 10 = = 9, (09), x 2 = 2 = = 18, (18). v 0.55 v 0.55 Округляем результаты до 0,01. С указанной точностью запишем ответ задачи: __ x опт. = (9,09;18,18); z max = 14%. Второй способ решения задачи. Рассмотрим еще один способ программирования: решения предыдущей задачи дробно-линейного МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 5 Секция 12 «МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ И БИЗНЕС-ПРОЦЕССОВ В ПРОМЫШЛЕННОСТИ» 0.012 x1 + 0.008 x 2 → max 0.01x1 + 0.04 x 2 + 1 при ограничениях: 1.8 x1 + 0.2 x 2 ≤ 20, 2.55 x1 + 1.2 x 2 ≤ 45, x ≥ 0, x ≥ 0 2 1 Сначала построим область допустимых планов (рисунок 4). z= x2 l1 100 1,8 x1 + 0,2 x2 = 20(l1 ) 2,55 x1 + 1,2 x2 = 45(l2 ) 37 l2 1 2 Lα 1 A Lα 2 B D O − 30 20 C 1 11 9 17 l1 x 11 17 S (20,−30) Рисунок 4 – График области допустимых планов Ею будет четырехугольник ОАВС. Теперь будем изображать на чертеже линии уровня целевой функции. Это линии, состоящие из точек, в которых целевая функция имеет определенное заранее заданное значение. Пусть z = a - постоянное значение. Линия уровня La , соответствующая значению α, будет задаваться уравнением 0.012 x1 + 0.008 x 2 . 0.01x1 + 0.04 x 2 + 1 Это уравнение можно преобразовать к виду α (0.01x1 + 0.04 x2 + 1) = 0.012 x1 + 0.08x2 . Очевидно, что при каждом постоянном значении α, это уравнение задает прямую, так как его можно записать в виде (0.01α − 0.012) x1 + (0.04α − 0.008) x2 + α = 0. α= Кроме того, все прямые Lα проходят через точку S, в которой равны нулю оба выражения, стоящие в числителе и в знаменателе целевой функции. Действительно, в этой МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 6 Секция 12 «МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ И БИЗНЕС-ПРОЦЕССОВ В ПРОМЫШЛЕННОСТИ» точке уравнение Lα превращается в равенство α ⋅ 0 = 0, которое справедливо при любом значении α. Точка S не входит в область допустимых значений целевой функции. Семейство { } прямых Lα имеет вид, представленный на рисунке 5. Это пучок прямых на плоскости x1Ox2 , проходящих через точку S (но не содержащие ее). x2 Lα 2 Lα 1 S Рисунок 5 – График целевой функции Изменяя α, мы будем «вращать» вокруг точки S линию уровня Lα . При вращении в одну сторону значение целевой функции будет увеличиваться, а при вращении в другую – уменьшаться. Найдем координаты точки S. Для этого нужно решить систему уравнений 0.012 x1 + 0.008 x 2 = 0, 0.01x1 + 0.04 x 2 + 1 = 0 Применяя какой-либо способ решения, находим x1 = 20, x2 = −30 . Из чертежа видно, что точкой максимума может быть или точка О, или точка В, т.к. А и С занимаю промежуточное положение. 0.12 ⋅ 0 + 0.008 ⋅ 0 z (O ) = z (0;0) = =0 0.01 ⋅ 0 + 0.04 + 1 , z ( B ) f 0, так как x1 f 0, x 2 f 0. Поэтому В точка максимума. Ее координаты находим из системы уравнений, задающих прямые l1 и l 2 ( B = l1 ∩ l 2 ) : 1.8 x1 + 0.2 x 2 = 20, 2.55 x1 + 1.2 x 2 = 45 Умножим на 6 обе части первого уравнения и вычтем из них соответствующие части второго уравнения. Получим 8.25 x1 = 75 т.е. 300 x1 = = 9,0909 K ≈ 9,09. 33 МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» 7 Секция 12 «МОДЕЛИРОВАНИЕ ЭКОНОМИЧЕСКИХ И БИЗНЕС-ПРОЦЕССОВ В ПРОМЫШЛЕННОСТИ» Подставив x1 в первое уравнение, находим: x2 600 = 18,1818K ≈ 18,18. 33 Далее определяем значение целевой функции z max = 0,14. В процентах это значение равно 14%. Для практической реализации, полученных количественных ориентиров, можно рекомендовать ввести систему контроля за выполнением реорганизованных бизнеспроцессов, в рамках которой необходимо: – тщательно планировать все виды работ, которые необходимы для завершения плана выпуска; – систематически производить оценку времени, ресурсов и затрат; – учитывать фактическое распределение затрат во временном разрезе; – периодически переоценивать время и затраты, необходимые для выполнения оставшейся работы; – сравнивать фактическое выполнение с графиком и бюджетом. Например, если происходит задержка окончания отдельных работ, то ускорить их выполнение можно за счет перераспределения трудовых ресурсов и оборудования. Если же задерживается поставка проектной документации, увеличиваются затраты на материалы и оборудование; если субподрядчики срывают директивные сроки, то необходимо пересмотреть план проекта. Коррекция плана может быть ограничена пересмотром параметров работ, а может потребовать разработки совершенно новой сетевой модели, начиная с текущего состояния и до момента окончания проекта. Вывод В результате решения поставленной задачи обоими способами возможно достижение наилучших показателей: объема выпуска продукции и рентабельности. Оптимальный план выпуска должен составить для производства винтов – 18,18 тыс. штук, а для лопастей – 9,09 тыс. штук. При подобном объеме производства возможно достижение рентабельности на уровне 14%. С помощью построения математических моделей была достигнута цель данного исследования, а именно проведено распределение и оптимизация ресурсов; была выявлена максимальная рентабельность, что поможет достичь наилучших показателей производства в будущем. Таким образом, методы и модели линейного программирования дают быстрое решение поставленных задач. Эти методы легко используемы при оптимизации процессов в рамках одного предприятия. Литература 1. Пинегина М.В. Математические методы и модели в экономике. Издательство «Экзамен», 2002. 2. М. Семененко. Введение в математическое моделирование. Солон-Р. 2002. МАТЕРИАЛЫ 77-Й МЕЖДУНАРОДНОЙ НАУЧНО-ТЕХНИЧЕСКОЙ КОНФЕРЕНЦИИ ААИ «АВТОМОБИЛЕ- И ТРАКТОРОСТРОЕНИЕ В РОССИИ: ПРИОРИТЕТЫ РАЗВИТИЯ И ПОДГОТОВКА КАДРОВ» М.: 8