быстродействующий адаптивный наблюдатель в системе
реклама

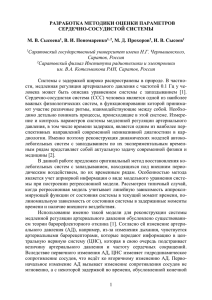
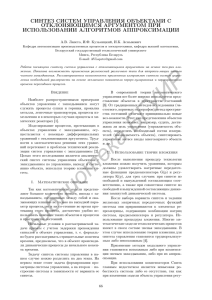
БЫСТРОДЕЙСТВУЮЩИЙ АДАПТИВНЫЙ НАБЛЮДАТЕЛЬ В СИСТЕМЕ КОМПЕНСАЦИИ НЕИЗВЕСТНОГО ЗАПАЗДЫВАНИЯ Настоящая работа посвящена построению системы компенсации неизвестного запаздывания. Наличие большого запаздывания, как известно [1], отрицательно сказывается на работоспособности системы управления. Для компенсации неизвестного запаздывания разработана адаптивная система, состоящая из быстродействующего адаптивного наблюдателя, вычисляющего оценки неизвестных параметров и запаздывания системы управления, и прогнозатора Смита, компенсирующего это запаздывание. Центральным моментом работы является построение алгоритма быстродействующего адаптивного наблюдателя для оценивания неизвестного запаздывания, так как прогнозатор Смита применим лишь в тех случаях, когда запаздывание априори известно. Этот алгоритм основан на использовании метода настраиваемой модели. Суть алгоритма изложена ниже. Пусть поведение интересующего дифференциальным уравнением: нас объекта ( x t ) a1x ( t ) a 0 x( t ) a 4 u( t 2 ) , описывается следующим (1) x( t 0 ) 0 ; x ( t 0 ) 0. Здесь a1=3, a0=2 - известные постоянные коэффициенты; a 4 , 2 - неизвестные постоянные. Тогда структурная схема соответствующего процесса управления будет иметь вид, представленный на рис. 1. Здесь приборному измерению доступны вход xd(t) и выход x(t) системы управления. Построим быстродействующий адаптивный наблюдатель для идентификации неизвестных параметров системы a 4 , 2 , а также прогнозатор Смита для компенсации запаздывания 2 , после чего будем подставлять получаемые наблюдателем оценки a 4 , 2 в прогнозатор. xd(t) u(t) r(t) KC a 4 e 2s (s 1)(s 2) x(t) – Рис 1. Система управления для объекта с неизвестным запаздыванием. b4 e 2 s ( s 1)( s 2) y(t) Адаптивный наблюдатель b4 , 2 – v(t) b4 1 e 2 s Блок настройки параметров ( s 1)( s 2) e(t )+ Прогнозатор Смита – xd(t) s u(t) a4 e 2 r(t) x(t) ( s 1)( s 2) KC – Рис. 2. Адаптивная система компенсации неизвестного запаздывания. На каждом из подынтервалов времени функционирования системы Jj настраиваемую модель опишем следующими уравнениями: ( y t ) a 1 y ( t ) a 0 y( t ) b 4 u( t 2 ), t J j , y( t j0 ) 0, y ( t j0 ) 0 (2) , где b 4 , 2 - параметры модели, настраиваемые соответственно на параметры a 4 , 2 объекта (1). Введем ошибку e(t) = x(t) - y(t). Конечная структурная схема системы управления с адаптивным наблюдателем и прогнозатором Смита показана на рис. 2. Система уравнений для выходного сигнала прогнозатора Смита v(t) и входного сигнала объекта, прогнозатора и наблюдателя u(t): v.. ( t ) a v. ( t ) a v( t ) b u( t ) b u( t ), 1 0 4 4 2 u( t ) K C r ( t ), r ( t ) x ( t ) v( t ) x( t ). d Уравнение для ошибки e(t) будет иметь вид (вычитаем (2) из (1) и линеаризуем правую часть): ( e t ) a 1e( t ) a 0 e( t ) 3 u( t ) 4 u ( t ) , (3) где 3 a 4 b 4 , 4 2 a 4 2 b 4 . Приведем (3) к системе уравнений первого порядка. Положим e1 ( t ) e( t ), e 2 ( t ) e( t ) a 1e( t ) 4 u( t ). Тогда в векторной форме уравнение (3) будет иметь вид e 1 ( t ) a 1 e 2 ( t ) a 0 1 e 1 ( t ) 0 0 e 2 ( t ) u( t ) + u ( t ) 3 0 4 (4) или в краткой форме e ( t ) Ae( t ) Z( t ) , = 3 где e( t ) (e1 ( t ), e 2 ( t )) , T 4 Т a1 a , A= 0 1 0 0 u( t ) , Z= u ( t ) 0 . Решением (4) будет e1 ( t ) 11 ( t ) 12 ( t ) e 2 ( t ) 21 ( t ) 22 ( t ) e1 ( t j0 ) R 11 e 2 ( t j0 ) R 21 R 12 3 R 22 4 (5) или в краткой форме e ( t ) ( t ) e ( t j 0 ) R ( t ) , 11 ( t ) 12 ( t ) ( t ) 22 ( t ) где Ф(t)= 21 , R(t)= R 11 R 21 R 12 R 22 - решения уравнений ( t ) A( t ), ( t ) E; j0 (6) ( t ) AR( t ) Z( t ), R( t j0 ) 0 R . (7) Перепишем первую строку системы (5) в виде w( t ) q T ( t )( j1 ), (8) где w( t ) e1 ( t ) 11 ( t )e1 ( t j0 ), q T ( t ) ( 12 ( t ), R 11 ( t ), R 12 ( t ) ), j1 ( e 2 ( t j0 ), 3 , 4 ) Т . T Здесь w(t) и q ( t ) - известные величины для любого t; вектор содержит неизвестные параметры объекта, а векторы j (j=0,l,...,N-l) являются функциями перестраиваемых параметров эталонной модели b 4 , 2 . Набирая данные на каждом из подынтервалов Jj в моменты времени tj1,...,tjm, образуем из (8) алгебраическую систему вида w( t ji ) q T ( t ji )( j1 ), i 1,, m или в матричной форме d j Q j ( j1 ). (9) Число m выбирается так, чтобы уравнений в (9) было не меньше числа неизвестных параметров. В данном случае m больше или равно 3. Решение алгебраической системы (9) при этом записывается в виде j1 Q j d j где Q j (10) - псевдообратная матрица. Изменение параметров j при переходе от подынтервала Jj к Jj+1 осуществляется по рекуррентной формуле j1 j tQ j1d j1 , (11) где =diag(1,....,3) - вещественная диагональная матрица, все числа i>0. Можно показать [2], что этот процесс перестройки параметров сходится экспоненциально, т.е. значения перестраиваемых параметров модели b 4 , 2 сходятся к значениям неизвестных параметров объекта a 4 , 2 . Таким образом, для того, чтобы идентифицировать постоянные неизвестные параметры a 4 , 2 объекта (1), параметры настраиваемой модели (2) b 4 , 2 следует изменять с помощью алгоритма, который описывается уравнениями (6)-(11). Было проведено численное моделирование этой системы на ЭВМ в среде MATLAB 5.2. Результаты компьютерного моделирования подтверждают эффективность разработанного алгоритма. Предлагаемый алгоритм адаптивного наблюдателя обладает важными для практики свойствами: заданной длительностью переходного процесса по параметрам и запаздыванию; отсутствием взаимного влияния переходных процессов настройки в разных параметрических каналах и практической независимостью времени переходных процессов по параметрам и запаздыванию от изменения амплитуды входных и выходных сигналов. Список литературы [1] Гурецкий X. Анализ и синтез систем управления с запаздыванием. Пер. с польского. - М.: Машиностроение, 1974. [2] Копысов О.Ю., Прокопов Б.И. Построение алгоритма перестройки параметров и запаздывания в методе настраиваемой модели. М.: МГИЭМ, 1999. 3. А.В. Старосельский, Московский Государственный Институт Электроники и Математики, быстродействующий адаптивный наблюдатель в системе компенсации неизвестного запаздывания