Моделирование регуляции в сердечно
реклама

Моделирование регуляции в сердечно-сосудистом русле в покое и при
физических нагрузках. Гамилов Т.М., студент 631 группы МФТИВведение
Гонка спортивных достижений в последние десятилетия вовлекает в себя новые области научного знания. С точки зрения традиционной медицины организм профессионального спортсмена обладает огромным количеством патологий: аномально большим
сердцем, повышенным (или пониженным) кровяным давлением, нетипичным строением
скелета и т.д. И это без учета неизбежных в большом спорте травм. Поэтому для диагностики, лечения и прогнозирования состояния спортсмена нужны новые методы и новые
кадры. Одним из таких методов является математическое моделирование.
В настоящее время существует множество различных математических моделей, связанных со спортом (например, [1]). Они позволяют с той или иной точностью спрогнозировать состояние спортсмена, рассчитать различные ограничения, накладываемые особенностями организма или понять природу какого-либо физиологического процесса.
К сожалению, большинство моделей являются сугубо теоретическими и на практике почти не используются. Связано это с тем, что привязка параметров математической модели
к конкретному человеку является очень сложной и кропотливой задачей, зачастую не
осуществимой.
Данная работа является небольшим шагом в моделировании реакций сердечнососудистой системы человека на нагрузки. В качестве основы предполагается взять модель, описанную в [2]. Её необходимо дополнить особыми механизмами, благодаря которым сердечно-сосудистая система сможет реагировать на те или иные изменения внешних
условий - механизмами регуляции. Те или иные механизмы регуляции уже были рассмотрены в различных работах по моделированию кровеносной системы (см. [3],[4]), однако
характер рассмотренных механизмов или их локальность не позволяют напрямую использовать уже имеющиеся результаты.
После построения модели, способной имитировать реакцию сердечно-сосудистой
системы на некоторые воздействия, планируется провести несколько численных расчетов
и проанализировать адекватность результатов с использованием информации из [1] и [5].
Наконец, будет проведена попытка моделирования реакции сосудистой системы на сжимающее действие мышц нижних конечностей, возникающее в результате бега.
1
Постановка задачи
Целью данной работы является разработка метода, позволяющего спрогнозировать
реакцию сердечно-сосудистой системы на некоторые специфические внешние воздействия. В частности, наиболее интересным случаем из предложенных к рассмотрению будет сдавливание вен нижних конечностей при беге или ходьбе. Также будут рассмотрены
следующие воздействия на сосудистую систему: пережатие плечевой артерии (окклюзионная проба), смена положения тела в пространстве. Выделим три основных задачи, которые будут решены в рамках данной работы.
Первой задачей является модификация модели, описанной в работе [2] и моделирование окклюзионного теста (см.[6]). Модель представляет собой систему одномерных эластичных трубок, имитирующих кровеносные сосуды. На трубках решается система гиперболических уравнений, в местах сопряжений рассчитывается перераспределение потоков.
Предполагается внести некоторые поправки для учета эффекта ауторегуляции сосудов.
Под ауторегуляцией понимается способность сосуда менять свойства в ответ на изменение характера кровотока. Будут рассмотрены различных варианты ауторегуляции: с зависимостью от потока крови и с зависимостью от давления. Для тестирования модифицированной модели сначала будут использоваться простые деревья при различных граничных
условиях (приложение А). Затем механизм ауторегуляции будет протестирован на более
сложном дереве, имитирующим большой круг кровообращения (приложение Б). Для проверки работы механизмов ауторегуляции будет проведено численное моделирование окклюзионного теста, подробно описанного в [6].
Следующей задачей является численное моделирование смены положения тела в
пространстве. При резкой смене положения тела с горизонтального на вертикальное в сосудистой системе человека происходит перераспределение крови, меняются поля давлений и скоростей. Значительная часть крови уходит в нижние конечности и "оседает" в венах. Планируется рассмотреть и сравнить два варианта: с ауторегуляцией и без нее. Для
проверки достоверности полученных результатов будут использоваться данные из [5].
Наконец, последней задачей является попытка моделирования кровообращения
спринтера. Для это нужно модифицировать имеющуюся модель с целью симуляции воздействия мышечного насоса. Мышечный насос — важный регуляторный механизм, играющий огромную роль в течении крови от вен к сердцу против силы тяжести. Мышцы, попеременно сжимаясь, выталкивают кровь наверх, а венозные клапаны не дают ей течь
вниз (Рисунок 1.1). Воздействие мышц на вены будет интерпретироваться как дополни-
2
тельное внешнее давление, оказываемое на сосуды. Для имитации венозных клапанов будет изменен характер силы вязкости.
Рисунок 1.1 Мышечный насос
Модель, учитывающая воздействие мышечного насоса, позволит спрогнозировать
некоторые изменения в динамике кровотока во время бега или ходьбы. Согласно [5], во
время ходьбы среднее давление в венах нижних конечностей человека должно падать несмотря на дополнительное сжимающее действие мышц. Проверить это положение, имея
на руках модифицированную модель, будет несложно.
В ходе данной работы также решается ряд вспомогательных задач: модификация
программы, облегчающей анализ больших массивов данных, анализ видеозаписей спортивных соревнований, модификация большого дерева сосудов и т.д.
3
2
2.1
Обзор источников
Обзор работ по регуляторным свойствам
Согласно [5], сердечно-сосудистая система состоит из сердца и сосудов — артерий,
вен и капилляров.
Основная функция сердечно-сосудистой системы — транспортная. Она состоит в
том, что сердце (насос) обеспечивает продвижение крови (транспортируемой жидкости)
по замкнутой цепи сосудов. Основное назначение постоянной циркуляции крови в организме заключается в доставке и удалении различных веществ. Кровь приносит ко всем
клеткам субстраты, необходимые для их нормального функционирования (кислород, питательные вещества) и удаляет продукты их жизнедеятельности (углекислый газ).
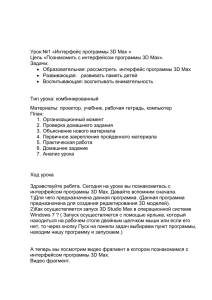
Сердечно-сосудистая система человека состоит из двух последовательно соединенных отделов: большого (системного) круга кровообращения, насосом для которого служит
левое сердце, и малого (легочного) круга кровообращения, движение крови в котором
обеспечивается правым сердцем (Рисунок 2.1)
Рисунок 2.1 Круги кровообращения
Следует отметить, что в данной работе моделируется только большой круг кровообращения. Это сделано с целью ускорения расчетов и упрощения задачи. В дальнейших работах малому кругу кровообращения и газообмену будет уделено большое внимание, т.к.
моделирование спортивных нагрузок не может быть полным без учета потребления кислорода.
4
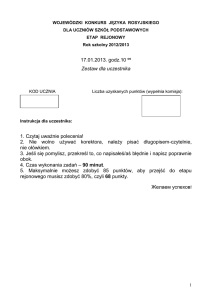
Под ауторегуляцией сосудов в данной работе подразумевается их способность подстраиваться и менять свои свойства при возрастании или падении потока крови. Стенка
сосуда имеет сложную структуру (Рисунок 2.2 Структура стенки сосуда). Условно её
можно разбить на три составляющие: intima, media и adventitia. В media находятся гладкомышечные клетки, которые способны напрягаться или расслабляться, меняя тем самым
эластичность сосуда.
Рисунок 2.2 Структура стенки сосуда
Степень растяжения гладкомышечных клеток определяется кровяным давлением.
Повышение давления ведет к растяжению клеток, что сопровождаются увеличением силы
сокращения. Поэтому возникающее в ответ на повышение давления кратковременное
расширение сосуда сменяется его сужением, это предохраняет сосуд от перерастяжения и
ограничивает объем крови, проходящий через сосуд (см.[7]). Понижение давления, наоборот, ведет к расслаблению клеток и расширению сосуда.
Таким образом, в качестве параметра, определяющего необходимость включения
ауторегуляции, удобно выбрать давление или величину потока крови через сечение сосуда.
Следует отметить, что моделирование регуляторных свойств сердечно-сосудистого
русла уже затронуто во многих работах. В работе [4] упоминаются два основных механизма локальной ауторегуляции. Первый обусловлен мышечным тонусом стенки артерии,
связанным со сдвиговым напряжением на её поверхности. Второй механизм определяется
средним трансмуральным давлением крови и известен как эффект Бейлиса или миогенный
ответ. В [4] подробно описан и смоделирован первый механизм: эффект расширения кровеносного сосуда с помощью оксида азота (NO), с учетом биохимических реакций в артериальной стенке. При поддержании трансмурального давления постоянным эффект Бейлиса не играет почти никакой роли. В данной же работе во всех предлагаемых численных
5
экспериментах кровяное давление будет сильно меняться, поэтому упор будет сделан
именно на первый механизм. К тому же скрупулезный подход и тщательное рассмотрение
биохимических реакции, происходящих в стенке сосуда, не годятся для нашей глобальной
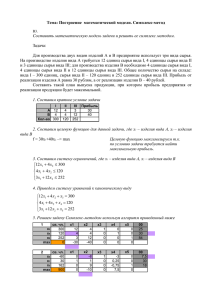
модели кровотока ввиду вычислительных сложностей и чрезмерного количества параметров. Однако, будет интересно сопоставить некоторые результаты. Одним из результатов
работы [4] является численный расчет зависимости относительного изменения радиуса
артерии от времени при возрастании потока крови на 25%
Рисунок 2.3 Зависимость относительного отклонения радиуса артерии от времени при увеличении кровотока на 25% (взято из [4])
В работе [3] рассмотрена модель гемодинамики с учетом нейрогенной регуляции.
Рассмотрен механизм барорецепторов, ускоряющий сердцебиение при понижении кровяного давления и замедляющий при понижении. Также рассмотрен механизм, увеличивающий или понижающий сопротивление артериол. Так же, как и в работе [2], представлена
глобальная модель гемодинамики, состоящая из совокупности эластичных одномерных
трубок. Уравнение неразрывности для сосудов, подверженных нейрогенной регуляции,
модифицировано. Большую роль играет давление в определенной точке системы, в которой расположены барорецепторы. Рассмотрен эффект нейрогенной регуляции при повышении и понижении кровяного давления. Особое внимание уделяется церебральному кровообращению (кровообращению в области головного мозга), давлению в артериях и артериолах головы. Дерево сосудов в области головы имеет большое количество ветвей, отслеживается влияние нейрорегуляции на поддержание оптимального давления в церебральном круге кровообращения. В нашем случае упор делается на ауторегуляцию, т.е. на
локальную регуляцию свойств сосудов независимо от нервной системы. В дальнейших
6
работах так же планируется рассмотреть механизмы нейрогенной регуляции, влияющие
на работу сердца и свойства периферических сосудов.
2.2
Обзор работ по моделированию кровообращения бегуна
В [5] подробно описано влияние сжимающего действия мышц на кровоток, т.н. мы-
шечный насос. Действие этого насоса заключается в том, что при сокращении скелетных
мышц сдавливаются вены, проходящие в их толще. При этом кровь выталкивается к сердцу, т.к. ее обратному движению препятствуют венозные клапаны (Рисунок 1.1). Каждое
мышечное сокращение ускоряет кровоток и уменьшает объем крови в венах. Эти эффекты
особенно ярко выражены при сильном наполнении вен (например, в венах ног человека,
находящегося в вертикальном положении). При стоянии кровоток замедлен. После начала
ходьбы кровоток резко ускоряется, кровь выталкивается из вен, а среднее давление в венах падает (Рисунок 2.4).
Рисунок 2.4 Изменение давления в тыльной вене стопы во время ходьбы (взято из [5])
Благодаря работе мышечного насоса снижается венозное давление, что, в свою очередь, уменьшает фильтрационное давление в капиллярах и понижает опасность возникновения отеков. При прекращении ходьбы давление в венах снова повышается, что при нормальном функционировании венозных клапанов обусловлено не обратным током крови, а
ее поступлением из артерий через капилляры.
Люди, ведущие сидячий или стоячий образ жизни почти не задействуют мышечный
насос. В результате в венах ног скапливаются большие объемы крови, а давление возрастает. Вены не приспособлены к высокому давлению, поэтому такая ситуация через много
лет может привести к ухудшению работы венозных клапанов и различным сосудистым
заболеваниям, например, варикозному расширению вен.
7
Для моделирования кровообращения бегуна необходимо учесть то, что организм
спортсмена существенно отличается от организма среднестатистического человека. Многолетние тренировки приводят к значительным изменениям в характеристиках сердченососудистой системы. Существует большое количество работ, исследующих эти изменения
(например, [8] и [9]). Сердечный выброс тренированного спортсмена может превышать
сердечный выброс обычного человека почти в два раза. Различаются и такие параметры
сердца, как толщина миокарда, объем желудочков, частота сердцебиения в покое, угол и
скорость раскрытия сердечных клапанов, размер сердца и т.д.
Показатели сосудистой системы спортсмена также очень сильно отличаются от показателей обывателя. Многие сосуды становятся толще, сдавливающее действие мышц во
время бега и ходьбы интенсивнее, эластичность стенок сосудов меняется. Последний параметр - эластичность - является особенно важным для нашей модели. Основным показателем степени эластичности сосудов является скорость распространения пульсовой волны
(pulse wave velocity или PWV). Согласно [8] в результате интенсивных многолетних занятий спортом скорость пульсовой волны может как увеличиться, так и уменьшиться. У тяжелоатлетов наблюдаются более высокие показатели PWV, т.е. силовые тренировки приводят к тому, что стенки сосудов становятся более жесткими. У бегунов, напротив, сосуды
более эластичные и показатели PWV ниже. В работе [9] приводится соотношение между
скоростями пульсовых волн в различных группах людей (Рисунок 2.5).
Рисунок 2.5 PWV различных групп людей (взято из [9])
Видно, что у спортсменов характерная скорость пульсовой волны ниже, чем у простых здоровых людей, примерно на полтора метра в секунду. При моделировании бегуна
будет необходимо внести соответствующие поправки в параметры дерева сосудов.
Мышечный насос воздействует на вены человека, а потому особое внимание нужно
уделить моделированию вен. Вены очень сильно отличаются от артерий, как геометриче8
скими размерами, так и особенностями строения. Слой, содержащий гладкомышечные
клетки (media), в венах очень тонкий и им гораздо тяжелее поддерживать круговую форму. Зачастую профиль вен напоминает сильно приплюснутый круг. Ауторегуляция в венах также проявляется слабее, чем в артериях. В этой работе мы не будем учитывать качественные отличия вен от артерий. а обойдемся лишь отличиями в некоторых характеристиках: длина, диаметр, жесткость.
Эластичность вен гораздо выше, чем эластичность артерий. Взять конкретные значения для PWV вен можно в работе [10]. В ней представлены исследования по измерению
и анализу PWV в различных венах человека. Для измерения скорости пульсовой волны
использовалась УЗИ-Допплер диагностика сосудов. Характерные значения для PWV вен
составляют 1-2 м/c, т.е. в 3-4 раза меньше, чем в артериях.
Согласно [5] лишь 15% крови находится в артериях. В венах этот показатель достигает 60-65%. Структуры деревьев вен и артерий в рамках данной работы считаются идентичными, длины артерий и вен также одинаковы. Оценим, во сколько раз диаметр виртуальных вен должен превышать диаметр виртуальных артерий:
где
d vein
ния вены,
— диаметр вены,
S art
d art
dvein
Svein
60
2,
d art
Sart
15
(1)
Svein
— площадь поперечного сече-
— диаметр артерии,
— площадь поперечного сечения артерии.
.
9
Модель гемодинамики
3
3.1
Общие положения модели
В качестве основы модели глобального кровотока в [2] предлагается использовать
квазиодномерную нелинейную модель пульсирующего течения вязкой несжимаемой жидкости по эластичной трубке. С помощью соответствующих граничных условий эта модель
обобщается на случай пульсирующего течения по графу (дереву) эластичных трубок
(пример дерева - Приложение Б). Каждая ветвь такого дерева сопоставляется кровеносному сосуду, а узел сопоставляется бифуркации сосудов или сердцу. Области микроциркуляции крови достаточно сложны для моделирования ввиду их особых свойств: малость
диаметров капилляров, большое количество сосудов, характер течения (диаметр самых
мелких капилляров примерно равен характерному размеру клеток крови, что делает необоснованным применение законов гидродинамики) и т.д. Поэтому их предлагается заменить виртуальными сосудами большого сечения с некоторым интегральным сопротивлением. Эти сосуды служат местами соединений дерева артерий с деревом вен.
Для каждого сосуда должны выполняться законы сохранения массы и импульса
жидкости (крови), которые в данном случае предлагается записать в виде:
Sk ( Sk uk )
k (t , x, Sk , uk , ri )
t
x
(2)
uk (uk2 2 pk k )
k (t , x, Sk , uk , ri )
t
x
(3)
где t — время; x — координата по длине сосуда, отсчитываемая от точки сопряжения с
сосудами младших поколений; — плотность крови (предполагается равной 1 г/см3);
k
— номер сосуда; Sk t , x — поперечное сечение сосуда; uk t , x — линейная скорость
потока, осредненная по поперечному сечению; pk t , x — давление в сосуде, отсчитываемое от атмосферного; k — приток или отток крови (предполагается равным нулю); k
— внешние силы (сила гравитации, сила вязкого трения).
3.2
Уравнение состояния, граничные условия и области стыковки сосудов
Эластические свойства стенок сосуда могут быть описаны так называемым “уравне-
нием состояния”, которое определяет зависимость поперечного сечения сосуда от давления в этом сечении:
pk p*k ck2 f k Sk ,
(4)
10
где ck — жесткость сосуда (имеет размерность скорости); p*k — давление в тканях,
окружающих сосуд, например, плевральное давление, оказываемое бронхиальными трубками. В данной работе p* предполагается равным нулю во всех задачах, кроме задачи по
моделированию бегуна. При моделировании бегуна p* будет играть роль сжимающего
действия мышц. Конкретный вид уравнения состояния (4) зависит от типа и размера сосуда.
В данной работе для всех сосудов используется:
exp Sk Sk0 1 1, Sk Sk0
,
f k ( Sk )
0
0
ln
S
S
,
S
S
k
k k k
(5)
где S k0 — поперечное сечение сосуда в покое (при нулевых скоростях).
Уравнения (2) и (3) могут быть записаны в дивергентной форме, которая, используя
следующие векторные обозначения:
Vk Sk , uk , Fk uk Sk , pk k uk2 2 и gk k , k ,
(6)
имеет вид:
Vk t Fk Vk
x g k .
(7)
Для постановки краевых условий на концах сосуда предлагается использовать также
характеристическую форму уравнений, которая вдоль i-ой характеристики имеет вид:
Wki dVk dt Wki Vk t ki Vk x Wki g k , i 1, 2 ,
(8)
где ki — собственные числа матрицы Якоби Ak Fk Vk , получаемые из уравнения:
Det Ak k E 0 ,
(9)
где E — единичная матрица; Wki — левые собственные вектора матрицы Ak , получаемые
из системы линейны уравнений:
Wki Ak ki E 0 .
(10)
Из уравнений (2)–(4) следует, что:
ki uk 1
i 1
ck Sk
f k
; Wki ck
Sk
f k
i 1
, 1
Sk , i 1, 2 .
Sk
(11)
11
Из последнего соотношения видно, что параметр ck можно трактовать как скорость
распространения малых возмущений. Этот факт позволяет нам брать значения ck из различных работ по измерению PWV человека (например, [9] и [10]). Высокое значение ck
соответствует жесткой стенке сосуда, низкое — эластичной и легко растягивающейся.
Условие совместности гиперболических уравнений (8) должно рассматриваться совместно с другими краевыми условиями на концах всех сосудов. При этом если рассматривается начальная точка (вход в сосуд), то должно использоваться условие (8) с учетом (11)
вдоль второй характеристики i 2 . Первая характеристика в этом случае выходит за
пределы интегрирования, поскольку она имеет отрицательный угол наклона. Поэтому
вместо соответствующего ей уравнения совместности необходима постановка других краевых условий. Проводя рассуждения, аналогичные предыдущим, становится ясно, что для
концевой точки (выход из сосуда) следует использовать условие (8) с учетом (11) вдоль
первой характеристики i 1 .
Во всех внутренних точках для каждого сосуда начальные условия могут быть выбраны весьма произвольно с учетом их физиологической корректности, например:
Sk 0, x Sk0 , uk 0, x Q0 / Sk0 , k 1,..., K .
(12)
В качестве S k0 выбиралось значение поперечного сечения сосуда, соответствующее
его ненапряженному состоянию (поскольку именно это значение, как правило, можно
напрямую определить из анатомических атласов). Начальная скорость предполагалась
равной нулю. При таком выборе начальных условий требуется рассчитать модель в течение нескольких сердечных циклов, после чего во всех сосудах устанавливаются значения
динамических параметров, соответствующие норме. Эти значения могут быть использованы в качестве начальных условий для проведения дальнейших вычислительных экспериментов.
На входах в сосуды, соединенные с сердцем, в качестве краевых условий может быть
задан объемный расход крови:
u A t ,0 S A t ,0 QA t ,0 .
(13)
На выходах из вен, соединенных с сердцем пульсации кровотока практически отсутствуют, при этом их поперечные сечения остаются неизменными. При таких условиях
кровоток в области впадения вен в предсердия, с определенной степенью, точности можно
считать стационарным. Таким образом, в этих точках в качестве граничного условия мо12
жет быть задано давление, значение которого определяется из расчетов с использованием
модели сердца:
pV t , X V pV t .
В данной работе это давление предполагается постоянным.
В области стыковки сосудов в качестве одного из краевых условий предлагается использовать условие перепада давления, обусловленное гидродинамическим сопротивлением этой области (закон Пуазейля). Считая, что область бифуркации образована сосудами с номерами k k1 ,..., kM , это условие принимает вид:
pk (t , x) pl (t ) k RkLQk (t , x), k k1 , k2 ,..., kM .
(14)
Считается также, что в областях бифуркаций сосудов отсутствует как приток, так и
потери крови, что может быть выражено как:
k k1 ,..., kM
k Qk (t , x)
k k1 ,..., kM
k uk S k 0 .
(15)
Здесь RkL — означает гидродинамическое сопротивление для k-го сосуда в области бифуркации с индексом L. При этом, для сосудов входящих в область бифуркации:
k 1, x X k (выход из сосуда), в то время, как для сосудов исходящих из этой области:
k 1, xk 0 (вход в сосуд).
Реальный поток крови в области бифуркации сосудов имеет весьма сложную структуру. Поэтому для его корректного описания необходимо использовать модель, основанную, по крайней мере, на двумерном описании кровотока в области бифуркации. Однако в
рамках глобальной модели такой подход приводит к резкому увеличению вычислительных ресурсов, необходимых для расчета хотя бы нескольких сердечных циклов, поскольку
количество рассматриваемых бифуркаций может доходить до нескольких тысяч.
Для повышения производительности модели при расчете краевых условий на концах
сосудов, входящих и исходящих из области бифуркации, предлагается использовать уравнения (14), (15) с учетом условий совместности (8). В пользу такого подхода говорит тот
факт, что размеры области бифуркации имеют тот же порядок, что и диаметр наибольшего из входящих и исходящих сосудов в бифуркации.
13
3.3
Модификация модели
3.3.1 Учет гравитации
Для учета сил гравитации правую часть уравнения (3) перепишем в виде:
k (t , x, Sk , uk , ri ) k G k (t , x, Sk , uk , ri ) .
(16)
Здесь k (t , x, Sk , uk , ri ) — силы на единицу массы помимо сил гравитации (например, сила
трения), G — вектор ускорения свободного падения (обозначили заглавной буквой, чтобы не путать с обозначениями из (8)), k — вектор ориентации k-ой ветви. Под вектором
ориентации понимается следующее:
k
rk1 rk 2
.
rk1 rk 2
(17)
Вектор rk 1 — это радиус-вектор узла, из которого выходит k-я ветвь. Соответственно
вектор rk 2 — это радиус-вектор узла, в который входит k-я ветвь. Ось x всегда направлена
от узла с радиус-вектором rk 1 к узлу с радиус-вектором rk 2 . Нетрудно заметить, что если
поменять узлы местами, то изменится лишь знак скорости потока крови.
Если допустить, что радиус-векторы узлов могут меняться со временем, то получим
модель, моделирующую кровообращение при различных движениях человека, например,
при раскачивании руки. В рамках данной работы все узлы статичны и меняют своего положения. Небольшим исключением служит моделирование смены положения тела в пространстве, где резко включается гравитация.
3.3.2 Ауторегуляция
Одним из главных отличий кровеносного сосуда от эластичной трубки является то,
что сосуд состоит из живых тканей и клеток, в которых постоянно протекают различные
биохимические процессы. Это позволяет сосуду реагировать на изменения каких-либо
внешних условий, играть в кровотоке "активную" роль в противовес "пассивной" эластичной трубке. Поэтому при моделировании реакции сердечно-сосудистой системы на различные нагрузки необходимо учитывать механизмы ауторегуляциии.
Ауторегуляция — способность сосуда подстраиваться под изменения каких-либо
внешних условий. "Научить" эластичную трубку (ветвь) реагировать на внешние условия
можно путем изменения каких-либо ее параметров. Во взятой модели эластичная трубка,
помимо своего положения в дереве, характеризуется следующими параметрами: длина,
площадь поперечного сечения в состоянии покоя S 0 (при нулевой скорости кровотока),
14
жесткость c и сопротивление R. Среди этих величин к эластичности стенки сосуда прямое
отношение имеют жесткость и площадь поперечного сечения. Поэтому в рамках данной
работы рассмотрены варианты ауторегуляции, при которых сосуд реагирует на изменение
внешних условий путем регулирования либо параметра c, либо параметра S 0 .
Следующим шагом будет определение внешних условий, на которые должен реагировать сосуд. С этой точки зрения в данной работе рассмотрено два вида ауторегулиции:
ауторегуляция по потоку крови и ауторегуляция по давлению. Давление и поток крови не
случайно взято в качестве параметров, определяющих внешние факторы. Во-первых, о их
значимости в процессах ауторегуляции упоминается во многих источниках ([4],[5],[6],[7]).
Увеличение потока крови или давления растягивает стенки сосуда, что заставляет сокращаться гладкомышечные клетки в стенках сосуда (подробнее в разделе 2.1). Во-вторых, в
рамках используемой модели за давлением и потоком крови сравнительно легко наблюдать: давление можно вычислить через площадь с использованием уравнения состояния (4), а поток крови является произведением площади поперечного сечения сосуда на
скорость кровотока.
В реальности сосуд реагирует на изменения давления или потока крови почти мгновенно. Можно зарегистрировать изменения свойств сосуда даже в рамках одного сердечного цикла. Моделирование подобных быстрых изменений приводит к неустойчивости
модели и большим сложностям в вычислительном плане. Поэтому в качестве параметров,
определяющих изменение внешних условий, будут использоваться не давление и поток, а
среднее давление и средний поток. Усреднение будет проводиться как по длине сосуда,
так и по времени. Чем меньше период осреднения по времени, тем более точную картину
кровотока мы получим. Однако, период осреднения должен включать в себя по крайней
мере 3-4 сердечных цикла, чтобы наша модель не реагировала, например, на различия
между систолическим и диастолическим давлением.
В качестве характера зависимости параметров ветви от давления или потока крови
предлагается рассмотреть наиболее простые степенные зависимости вида:
Anew Bnew
Aold Bold
(18)
Здесь A — какой-либо параметр ветви, B — или среднее давление, или средний поток крови, — действительное число. Вид данной зависимости оправдан из некоторых
соображений, часть из которых высказана в работе [4], а часть будет приведена в дальнейшем.
15
В дальнейшем в качестве параметра A будет использоваться жесткость c. Во-первых,
физический смысл изменения жесткости достаточно близко соответствует характеру биохимических процессов, протекающих при ауторегуляции в реальном кровеносном сосуде:
напряженные гладкомышечные клетки являются более жесткими, в них выше скорость
пульсовой волны. Во-вторых, в ходе численных тестов на простых графах (см. Приложение А) было выявлено, что использование S 0 в качестве параметра, определяющего реакцию сосуда на изменение внешних условий, приводит к неустойчивости модели даже при
незначительных изменениях потока или давления. Неустойчивость модели наблюдалась
при различных показателях степени в (18) и при различных параметрах, характеризующих внешнее воздействие (давление или поток крови). Кратко результаты тестирования
различных вариантов ауторегуляции приведены в Таблица 3-1.
Таблица 3-1. Устойчивость различных вариантов моделей ауторегуляции при тестировании на
простых графах (Приложение А)
Площадь поперечного сечения S 0
Жесткость С
Давление
модель неустойчива
модель устойчива
Поток крови
модель неустойчива
модель устойчива
Сокращение гладкомышечных клеток и их напряжение, вообще говоря, не являются
идентичными процессами. Как правило, процессы расслабления в организме происходят
медленнее, чем процессы напряжения. Поэтому формулу (18) следует обобщить:
1
cnew Bnew
Bnew
1,
, если
cold Bold
Bold
2
cnew Bnew
Bnew
1.
, если
cold Bold
Bold
(19)
Здесь 1 2 0 . Положительность 1 и 2 обусловлена тем, что при возрастании
давления или потока крови происходит увеличение силы сокращения гладкомышечных
клеток. Это, в свою очередь, вызывает рост жесткости сосудов (см. [7]). Расчет новых значений жесткости происходит в какой-то момент времени t * , Bnew — среднее значение параметра B (давление либо поток) на отрезке времени [t * T ; t * ] , Bold — среднее значение
параметра B на отрезке времени [t * 2T ; t * T ] , T — период осреднения (см. Рисунок 3.1).
16
Рисунок 3.1. Момент расчета новых параметров.
После расчета новых значений жесткости значение Bnew записывается в значение
Bold , а Bnew вычисляется уже на отрезке [t * ; t * T ] .
Выход на новое значение
cnew
лучше производить не скачкообразно, а постепенно.
Во-первых, это лучше соответствует действительности. Гладкомышечные клетки реагируют хоть и быстро, но не скачкообразно. Во-вторых, это повысит устойчивость модели и
облегчит отслеживание изменений. В модели ауторегуляции жесткость выходит на новое
значение по линейному закону в течение периода осреднения T (Рисунок 3.2).
Рисунок 3.2. Выход жесткости на новое значение.
В некоторых случаях время выхода жесткости на новое значение превышает период
осреднения. При этом "пункт назначения" — значение
cnew
— может поменяться до того,
как будет достигнут (Рисунок 3.3).
Рисунок 3.3. Замедленный выход жесткости на новое значение.
17
Замедленный выход на новое значение нужен для того, чтобы сделать процесс расслабления медленнее, чем напряжение, а также для ослабления и замедления ауторегуляции в венах. Напомним, что в венах слой гладкомышечных клеток очень тонкий, из-за чего эффект ауторегуляции слабее, чем в артериях.
В ходе тестовых расчетов на простых графах (Приложение А) качественных различий между ауторегуляцией по потоку и ауторегуляцией по давлению выявлено не было.
Скорее всего это связано с тем, что возрастание потока почти всегда сопровождается возрастанием кровяного давления, а возрастание давления — возрастанием потока.
Точный механизм работы ауторегуляции до сих пор неизвестен. Существует немало
гипотез и теорий. Доводы в пользу использования ауторегуляции по давлению, а не по потоку, приводятся в работе [12]. Так, зависимость напряжения гладкомышечных клеток от
потока крови не является прямой. Сама по себе клетка не имеет информации о том, какой
поток крови протекает через поперечное сечение сосуда. Для влияния потока на состояние
напряженности стенок сосуда нужен промежуточный агент, зачастую не один. Давление,
напротив, напрямую влияет на состояние гладкомышечных клеток, растягивая стенки сосуда. Клетки чувствуют растяжение и начинают сокращаться.
В работе [12] упоминается эксперимент, в котором был полностью остановлен кровоток в участке тела подопытной крысы. Затем в сосудах искусственно повысили давление. При нулевом потоке наблюдался эффект ауторегуляции.
Эти доводы, а также результаты расчетов по смене положения тела (приведены в
разделе 4.3), склоняют выбор в пользу регуляции по давлению. Для определения показателя степени в формуле (19) будем исходить из следующей гипотезы: гладкомышечные
клетки стремятся сохранить свой размер. Если каждая клетка стремится сохранить свой
размер, то стенка сосуда в целом будет стремиться сохранить площадь поперечного сечения. Тогда из уравнения состояния (4) следует(при нулевом p*k ):
pk ck2 f k Sk ck2 const
(20)
pk
const.
ck2
(21)
Окончательное соотношение для ауторегуляции:
1
cnew Pnew 2
.
cold Pold
(22)
18
3.3.3 Мышечный насос.
Моделирование воздействия работы мышц на венозный кровоток является сложной
задачей, решить которую в общем виде на данный момент не представляется возможным.
Поэтому в данной работе мы будем использовать ряд серьезных упрощений. Будем считать, что давление со стороны мышц распределяется равномерно по всей поверхности сосуда. Также будем считать, что напряжение со стороны мышц приложено перпендикулярно оси сосуда. Последнее допущение позволяет нам не вносить никаких изменений в вид
закона сохранения импульса (3).
Для моделирования работы мышечного насоса перепишем уравнение состояния (4) в
виде:
pk ck2 f k Sk Padd .
(23)
Давление p*k заменено на Padd — дополнительное давление на вены со стороны
мышц. Для большинства сосудов Padd 0 . Исключение составляют лишь вены ног. Для
них дополнительное давление представляет собой некую периодическую силу, период которой равен времени двух шагов. Обозначим этот период как T2s . В рамках данной работы
были рассмотрены следующие виды
Padd :
Ступенчатая функция
T2 s n t T2 s n 0,5T2 s
P ,
Padd max
n N
0,
T
n
0,5
T
t
T
(
n
1)
2s
2s
2s
(24)
Рисунок 3.4. Ступенчатая Padd
Синусоида
Padd 0,5Pmax sin(t 2
T2 s
) 0,5Pmax
(25)
19
Рисунок 3.5. Padd в виде синусоиды
Прерывистая синусоида
Padd
2
T2 s n t T2 s n 0,5T2 s
Pmax sin(t T2 s ),
n N
0,
T2 s n 0,5T2 s t T2 s (n 1)
(26)
Рисунок 3.6. Padd в виде прерывистой синусоиды
В ходе тестирования на простых графах не было выявлено серьезных различий между эффектом различных
Padd кровоток. Padd вида (24) в силу своей прерывистости явля-
ется наименее приемлемой с точки зрения устойчивости численного метода. К тому же
она меньше всего соответствует напряжению мышц при ходьбе или беге, поэтому в дальнейшем мы сосредоточимся на функциях вида (25) и (26).
Конечной задачей данной работы является моделирование кровообращения при
быстром беге (спринте). В спринте фаза расслабления мышц ног выражена куда менее явно, чем при беге на длинные дистанции. Это неудивительно, ведь в забегах на 5, 10 и более километров критически важным является равномерное распределение сил и экономия
энергии. Поэтому опытные стайеры при каждом шаге расслабляют все мышцы, работа которых в данный момент не является необходимой. В спринте, напротив, беречь силы не
нужно, куда более важным здесь является развить максимальную скорость. Поэтому
Padd
вида (26) куда больше подходит стайеру, а не спринтеру. Эти соображения приводят нас к
20
выбору функции
Padd в виде синусоиды (25). Дополнительным преимуществом является
непрерывность производных по времени любого порядка.
Для оценки
Pmax представим мышцу в виде цилиндра, на который с торца приложе-
на сила, равная весу человека. Напряжение в направлении, перпендикулярном оси, будет
значением
Pmax . Тогда
mg
,
S 1
Pmax
где
m
— масса спринтера,
S
(27)
— площадь поперечного сечения мышцы (примерно равна
площади поперечного сечения ноги),
g
— ускорение свободного падения,
— коэф-
фициент Пуассона для мышечной ткани. Значение коэффициента Пуассона для мышц варьируется в зависимости от вида мышца, ее напряженности, способа измерения и многих
других факторов. В большинстве работ (например, в [11]) он берется равным 0,5. Массу
спринтера примем равной 80 кг, площадь поперечного сечения ноги — 300-400 см 2 . При
таких оценках
Pmax
20 кПа.
Функционирование мышечного насоса немыслимо без венозных клапанов, не позволяющих крови стекать назад по течению. Их присутствие имитируется с помощью изменения силы вязкого трения для вен нижних конечностей:
f ( s, u ), v 0
Fтр v
,A
,v 0
A
1.
(28)
Здесь f v ( s, u ) — сила трения, используемая в базовой модели, A — большое положительное число, играющее роль барьера. В ходе тестовых расчетов было установлено,
что в качестве A достаточно взять 1000 Н/кг.
Мышцы правой и левой ног работают в противофазе. Кроме того в противофазе работают мышцы голени и бедра. Благодаря последнему венозная кровь сначала выталкивается из голени в бедро, а затем из бедра в туловище (выталкиванию крови в обратном
направлении препятствуют венозные клапаны). Для учета этих эффектов в формулу (25)
следует внести небольшую корректировку:
Padd 0,5Pmax sin((t k ) 2
T2 s
) 0,5Pmax .
(29)
k — сдвиг по фазе для k-ой ветви. Если для вен правого бедра и левой голени взять
k 0 , то для вен левого бедра и правой голени следует взять k 0,5 T2 s .
21
Рисунок 3.7. Колебания давления в ветвях венозного дерева в различных участках нижних конечностей при работе мышечного насоса
На Рисунок 3.7 приведены результаты расчетов работы мышечного насоса. На графиках представлены зависимости давления от времени. Колебания давления в голенях почти полностью определяется давлением
помимо
Padd и поэтому похожи на синусоиды. В бедрах
Padd влияние оказывает приток крови от голеней, что объясняет наличие допол-
нительных максимумов. Обратное влияние (от бедер к голеням) не оказывается благодаря
работе венозных клапанов.
22
4
Результаты расчетов различных задач с использованием модифицированной модели
4.1
Окклюзионный тест
С помощью построенного графа большого круга кровообращения (Приложение Б)
была предпринята попытка смоделировать задачу о пережатии плечевой артерии. Задача
возникла из беседы с Парфеновым А.С., доктором медицинских наука, автором разработки прибора «АнгиоСкан». Прибор представляет собой двухканальное устройство, позволяющее снимать фотоплетизмограммы с пальцев обеих рук
Рисунок 4.1. Снятие фотоплетизмограммы прибором ангиоскан
Фотоплетизмограмма (ФПГ) по форме весьма похожа на кривую артериального давления, но, в отличие от последней, характеризует колебания объема микрососудов. В рамках рассматриваемой задачи высокая амплитуда колебаний ФПГ соответствует высокому
давлению, низкая амплитуда — низкому давлению.
Согласно [6], окклюзия выполняется путем пережатия плечевой артерии на 3-5 минут. После снятия окклюзии в артериях резко увеличивается скорость кровотока. Увеличенный кровоток инициирует в эндотелиальных клетках синтез оксида азота, который
воздействует на гладкие мышцы артериальной стенки, что приводит к снижению тонуса
артерий. Снижение тонуса сосудов в свою очередь сопровождается увеличением амплитуды пульсовой волны (Рисунок 4.2, слева-сверху). Таким образом, оценка состояния эндотелия определяется по приросту амплитуды пульсовой волны до и после окклюзии. При
нарушении функции эндотелия амплитуда остается без изменений (Рисунок 4.2, справасверху). Отметим, что описанная реакция эндотелия соответствует модели из работы [4].
Изменение свойств стенки сосуда в этом случае в работе [4] связывают с изменением касательного напряжения, которое можно выразить через поток крови. Мы же при расчетах
используем ауторегуляцию по давлению (22).
23
Рисунок 4.2. Результаты окклюзионного теста: ФПГ здорового сосуда (слева-сверху); ФПГ сосуда с патологией (справа-сверху); расчет давления с использованием ауторегуляции (слева-снизу);
расчет давления без использования ауторегуляции (справа-снизу)
На Рисунок 4.2 (снизу) представлены результаты моделирования окклюзионного теста. Для имитации пережатия в ветви, соответствующей плечевой артерии, искусственно
повышалось сопротивление на две минуты. Видно, что в случае без ауторегуляции давление возвращается на прежний уровень, что соответствует сосуду с патологией. В случае с
включенной ауторегуляцией после снятия пережатия амплитуда давления возрастает как в
здоровом сосуде.
Еще раз подчеркнем тот факто, что при расчетах использовалась ауторегуляция по
давлению, а функционирование эндотелия на основе синтеза оксида азота принято связывать с потоком крови (см. [4] и [6]). Скорее всего подобные нестыковки связаны с тем, что
на деле работают сразу оба механизма (и по потоку, и по давлению).
Подчеркнем, что на данный момент существует немало гипотез о природе механизма ауторегуляции (см. [12]). Единого мнения по поводу того, какой именно фактор является первичным (давление, поток, концентрация кислорода), нет до сих пор.
24
4.2
Смена положения тела в поле тяжести Земли
Под сменой положения тела в пространстве будем понимать смену положения "ле-
жа" на положение "стоя". Эту простейшую операцию каждый человек проделывает ежедневно, зачастую не по разу. Для сердечно-сосудистой системы подобная рутинная операция связана со значительными перепадами давления, перераспределениями объемов крови
и, как следствие, необходимостью задействовать целый комплекс регуляторных механизмов: ауторегуляция, барорецепторный рефлекс и др. Эти механизмы помогают поддерживать оптимальные параметры кровотока в различных частях организма, прежде всего в
головном мозге.
С нарушенной работой регуляторных механизмов связано много болезней. Одной из
самых распространенных является ортостатическая гипотензия — чрезмерное снижение
артериального давления в верхней части тела в вертикальном положении тела. Заболевание диагностируют при снижении давления более чем на 20 мм рт ст. Симптомами являются потемнения в глазах, головная боль или обмороки при резкой смене положения тела.
Для расчета смены положения тела в пространстве в определенный момент времени
в правую часть уравнения (3) подставлялась сила гравитации, как в формуле (16). Сначала
для расчетов бралась модель без учета ауторегуляции. На Рисунок 4.3 приведены результаты расчетов для ветвей, соответствующим артерии головы (справа) и артерии ноги (слева). Видно, что площадь поперечного сечения артерии в ноге увеличилась, а в голове —
понизилась. Это является следствием возросшего (или упавшего) гидростатического давления. Т.к. область постоянного гидростатического давления в организме (и в модели)
находится в груди, то в ноге давление возросло, что привело к расширению сосуда, а в голове, наоборот, давление упало и сосуд сузился.
Рисунок 4.3. Расчет зависимости площади от времени при смене положения "лежа" на положение "стоя" без ауторегуляции (слева — ветвь, соответствующая артерии ноги; справа — ветвь, соответствующая артерии головы)
25
Теперь проведем аналогичный расчет, но уже с учетом ауторегуляции (22). Сначала
используем ауторегуляцию по потоку (Рисунок 4.4). Площадь виртуального сосуда в ноге
после смены положения тела сначала резко увеличивается, затем благодаря ауторегуляции
слегка уменьшается и устанавливается на довольно высоком уровне. Подобное поведение
больше соответствует поведению здорового сосуда, чем случай на Рисунок 4.3, но все же
не является удовлетворительным.
Рисунок 4.4.. Зависимость площади от времени в ветви, соответствующей артерии головы, при
смене положения тела при включенной ауторегуляции по потоку.
Теперь используем ауторегуляцию по давлению. На Рисунок 4.5 представлена зависимость площади от времени в ветви, соответствующей сосуду головы. Видно, что пассивное сжатие в результате падения давления сопровождается активным расширением.
Средняя площадь даже превышает изначальную, до смены включения гравитации.
Рисунок 4.5. Зависимость площади от времени в ветви, соответствующей артерии головы, при
смене положения тела при включенной ауторегуляции по давлению.
26
Для сосуда ноги результат симметричный (Рисунок 4.6). Фаза пассивного расширения сменяется фазой активного сжатия. В случае расчета ситуации, когда человек меняет
положение лежа на положение "вверх ногами", мы получим противоположные результаты, т.е. график для ветви ноги будет соответствовать ветви головы и наоборот.
Рисунок 4.6. Зависимость площади от времени в ветви, соответствующей артерии ноги, при
смене положения тела при включенной ауторегуляции по давлению
Поведение эластичных трубок с ауторегуляцией по давлению (смена пассивной фазы на активную) соответствует поведению здоровых сосудов (последнее описано, например, в [5],[12]). При смене положения лежа на положение стоя сосуды ноги сужаются, выталкивая кровь в сторону мозга. Сосуды головы, напротив, расширяются, чтобы компенсировать упавшее давление.
Ауторегуляция не решает проблемы с падением давления в артериях головы
(Рисунок 4.7). За нагнетание давления отвечает другой регуляторный механизм — барорецепторы, не реализованный в рамках данной работы.
Рисунок 4.7. Зависимость давления от времени в ветви, соответствующей артерии головы, при
смене положения тела при включенной ауторегуляции по давлению
27
4.3
Работа мышечного насоса при беге
При расчете мышечный насос (25) включается на определенный промежуток време-
ни. Период внешнего воздействия определяется предполагаемой частотой шагов по
формуле:
T2 s
2
(30)
На Рисунок 4.8 приведен результат расчета зависимости давления от времени при
работе мышечного насоса. Насос включался на одну минуту. График соответствует тыльной вене стопы. Частота шагов составляла 2 шага в секунду, режим работы сердца не менялся в течение расчета. Во время моделируемой ходьбы среднее давление сильно упало,
что соответствует Рисунок 2.4, взятому из [5].
Рисунок 4.8. Зависимость давления от времени при работе мышечного насоса в ветви, соответствующей тыльной вене стопы
Рисунок 4.9. Зависимость площади от времени при работе мышечного насоса в ветви, соответствующей тыльной вене стопы
28
Зависимость площади поперечного сечения сосуда от времени в том же эксперименте отображена на Рисунок 4.9. Заметно значительное падение площади сосуда, примерно
на 20-30%. В реальности при беге объем вен уменьшается гораздо сильнее. Параметры
численного эксперимента соответствуют скорее неспешной ходьбе. При изменении частоты шага и увеличении значения амплитуды Pmax в формуле (25) в 2-3 раза можно добиться
даже схлопывания артерий.
Обратим внимание на результаты расчета по потоку крови (период осреднения потока — 4 секунды) через ту же ветвь (Рисунок 4.10):
Рисунок 4.10. Средний кровоток через ветвь, соответствующую тыльной вене стопы, при различных частотах шага
Именно величина потока определяет количество питательных веществ и кислорода,
поступающих в мышцы нижних конечностей. Во время работы мышечного насоса наблюдается значительный рост потока крови. Величина возросшего потока меняется в зависимости от частоты шага. Интересно проследить эту зависимость.
Перед тем как продолжить, поясним выбор тыльной вены стопы как объекта для исследования. На самом деле можно выбрать любой другой сосуд нижних конечностей. Меняться будут лишь количественные значения потока, давления и площади, в то время как
качественных различий практически не наблюдается. Не изменится и величина оптимальной частоты бега, о которой пойдет речь ниже.
29
Вернемся к зависимости величины возросшего потока от частоты шагов. Для ее исследования проведем серию численных расчетов при различных частотах работы мышечного насоса. Частота шагов (частота работа мышечного насоса) является единственным
параметром, меняющимся от расчета к расчету Результаты приведены на Рисунок 4.11.
Наблюдается потока при определенной частоте шагов. Назовем эту частоту оптимальной.
Рисунок 4.11. Зависимость потока крови через тыльную вену стопы от частоты шагов.
В ходе дальнейших тестовых расчетов не было выявлено зависимости оптимальной
частоты от таких параметров, как частота сердечных сокращений, сердечный выброс, амплитуда внешнего давления
Pmax , выбранный сосуд (при условии, что сосуд является ве-
ной нижних конечностей). Все эти параметры, однако, оказывают существенное влияние
на поток крови, то есть на величину максимума, но не на максимизирующий аргумент.
Была выявлена зависимость оптимальной частоты от геометрических размеров дерева сосудов, прежде всего от длин ветвей. Чем выше общая длина ветвей, тем ниже оптимальная частота (Рисунок 4.12).
Рисунок 4.12. Смещение оптимальной частоты при увеличении "роста" модели. Красный цвет
(пунктир) — рост ок. 195 см; синий цвет (точки) — рост ок. 170 см
30
Общую длину ветвей можно связать с ростом модели человека. Уменьшение оптимальной частоты с увеличением роста соответствует тенденциям спорта. Так, высокие
спринтеры имеют относительно низкую частоту шагов и выигрывают у более низких
спортсменов засчет длины шага. Низкие спринтеры, напротив, сочетают высокую частоту
и малую длину шага.
Другой важный параметр, определяющий оптимальную частоту — эластичность сосудов, за которую во взятой нами модели отвечает жесткость c (см. (4)). С увеличением
жесткости оптимальная частота возрастает, с уменьшением — падает.
В рамках данной работы была проведена попытка расчета оптимальной частоты для
Уолтера Дикса — бронзового призера Пекинской олимпиады в забеге на 100 метров. Длины ветвей были приведены в соответствие с ростом Уолтера Дикса — 175 см. Параметры
жесткости брались из результатов исследований скорости пульсовых волн у спортсменовбегунов (см. [8]).
Истинную частоту шагов Уолтера Дикса можно вычислить, анализируя его забеги.
Анализ проводился путем покадрового просмотра записей нескольких забегов. Регистрировались кадры с идентичным положением тела спринтера, затем измерялось время между ними и количество выполненных шагов (Рисунок 4.13). Разделив количество шагов на
время нетрудно получить частоту шагов. Отметим, что анализировались средние участки
дистанции, когда спринтер уже набрал "крейсерскую" скорость, но еще не начал замедляться. Полученная частоту шагов — 4,72 0,05 шага в секунду. Это значение совпадает
с данными, приведенными в периодических изданиях, освещающих спортивные события.
Рисунок 4.13. Анализ забега Уолтера Дикса.
31
Результаты расчета на модели, соответствующей Уолтеру Диксу, приведены на Рисунок 4.13. Оптимальная частота находится в хорошем соответствии с истинной. Различия
между ними можно объяснить несколькими факторами. Во-первых, параметры модели не
в точности соответствуют Уолтеру Диксу. Во-вторых, в модели никак не учтены переход с
аэробного режима на анаэробный, работа других систем организма (опорно-двигательной,
нервной, дыхательной), работа других регуляторных механизмов и т.д.
Рисунок 4.14. Зависимость потока от частоты шагов у модели, соответствующей Уолтеру Диксу.
Красная линия — истинная частота шагов Уолтера Дикса (4,7 шагов в секунду)
32
5
Выводы (анализ результатов)
Из всех гипотез о природе ауторегуляции (см. [12]) в данной работе принята гипоте-
за о связи давления в сосуде с напряженностью гладкомышечных клеток. Результаты численных экспериментов по окклюзионному тесту и смене положения тела в пространстве
позволяют предположить, что предложенная схема работы ауторегуляции близка к реальности. Эластичные трубки с подключенной ауторегуляцией по потоку ведут себя как здоровые кровеносные сосуды (в рамках рассмотренных экспериментов). Некоторые расхождения с ожидаемыми результатами можно объяснить тем, что в построенной модели не
учитывались другие регуляторные механизмы: барорецепторный рефлекс, нейрогенная
регуляция и т.д.
Модель кровообращения спринтера при всех достаточно грубых допущениях позволила получить достаточно точный численный результат: рассчитанная оптимальная частота шагов отличается от истинной менее, чем на 5% (Рисунок 4.14. Зависимость потока
от частоты шагов у модели, соответствующей Уолтеру Диксу. Красная линия — истинная
частота шагов Уолтера Дикса (4,7 шагов в секунду). На основе подобного соответствия
можно сделать предположение о том, что за годы изнурительных тренировок сосудистая
система спринтера подстраивается под его частоту шагов таким образом, чтобы выдавать
максимальный поток крови через нижние конечности. Возможен и обратный процесс:
спринтер подбирает частоту шагов так, чтобы выйти на максимум кровотока. Впрочем,
это маловероятно, т.к. определяющее влияние на частоту шагов спринтера оказывает не
сосудистая система, а опорно-двигательный аппарат (см. [1]).
В перспективе полученные результаты дают надежду на использование модели при
анализе подготовки спортсменов-бегунов или спортсменов-лыжников, однако, для этого
потребуются ее значительные изменения и модификации (учет нейрорегуляции, отладка
процедуры снятия данных с человека и т.д.).
33
Заключение
В рамках данной цели было решено несколько задач:
Модифицирована модель гемодинамики, предложенная в [2], для учета механизма ауторегуляции и работы мышечного насоса.
Откалиброван обобщенный вариант сосудистой сети большого круга кровообращения (см. приложение Б) с целью бОльшего соответветствия организму
спортсмена-бегуна
Для облегчения анализа данных, получаемых при применении взятой модели
к построенному графу, была переписана программа, используемая при построении графиков параметров (скорость, площадь, давление, среднее давление, максимальное давление, поток, средний поток) от времени
Произведено численное моделирование двух тестов, позволяющих диагностировать состояние сосудов:окклюзионный тест и смена положения тела в
пространстве. Поведение модифицированной модели соответствует поведению здоровых сосудов.
Численно смоделировано влияние бега на кровоток. Рассчитана оптимальная
частота шагов с точки зрения максимизации потока крови через нижние конечности, произведено ее сравнение с истинной частотой, полученной из анализа видеозаписей спринтерских забегов
Результаты работы были представлены в тезисах трудов конференций [13-17]. Также
были представлены доклады на конгрессе с международным участием "Медицина для
спорта-2012" (31.05-1.06) и на выставке "Медицинское образование-2012" (4-6 апреля).
Работа выполнена при поддержке гранта РФФИ 11-01-00855-а и ГК П727.
34
Список литературы
1. Ross H. Miller, Brian R. Umberger. Limitation of maximum sprinting speed imposed by
muscle mechanical properties. // Journal of Biomechanics, 45 (2012) 1092-1097
2. Симаков С.С. А.С. Холодов, А.В. Евдокимов Методы расчета глобального кровотока в
организме человека с использованием гетерогенных вычислительных моделей // В кн.:
Медицина в зеркале информатики. – М.: Наука, 2008. – С. 124-170.
3. В.Б. Кошелев, С.И. Мухин, T.B. Соколова, Н.В. Соснин, А.П. Фаворский. Математическое
моделирование гемодинамики сердечно-сосудистой системы с учетом влияния нейрогенной регуляции на работу сердца. // Препринт. М., МАКС Пресс, 2005, 26 с.
4. Кудряшов Н.А., Чернявский И.Л. Численное моделирование процесса ауторегуляции в
артерии. // Механика жидкости и газа. 2008. №1. С.38 -56.
5. Физиология человека: учебник для вузов: в 2 ч. / под ред. Р. Шмидта, Г. Тевса. — М.:
Издательство Мир,1996.—Ч.2.
6. Парфенов А.С. Экспресс-диагностика сердечно-сосудистых заболеваний. // Мир измерений. 2008. №6. С.74-82
7. Капелько В.И. Регуляция кровообращения // Соросовский образовательный журнал.
1999. №7. - С.79 -84.
8. Otsuki T., Maeda S., Iemitsu M., Saito Y. Relationship between arterial stiffness and athletic
training programs in young adult men.// Am J Hypertens - No 20, 2007 -p. 967-973
9. Rodilla Sala, Candel Rossel, Perez Encinas. The continuum of pulse wave velocity from
young elite athletes to uncontrolled older patients with resistant hypertension // Journal of Hypertension - Vol. 28, June 2010 - pp.19.216
10. Jurgen H. Nippa, Raymond H. Alexander, Roland Folse. Pulse wave velocity in human
veins. // Journal of Applied Physiology - vol.30,No 4,April 1971 -p. 558-563
11. Ogneva I.V., Ushakov I.B. The transversal stiffness of skeletal muscle fibers and cardiomyocytes in control and after simulated microgravity // Atomic Force Microscopy Investigations into Biology - From Cell to Protein — Edited by Christopher L. Frewin — InTech, February,
2012 — p. 325-353
12. Paul C. Johnson. Autoregulation of blood flow // Circulation research — Vol 59, No 5, November 1986 — p. 482-495
13. Гамилов Т.М. Численное моделирование неинвазивных методов оценки эластичных
свойств периферической области кровяного русла. // Труды 53-й научной конференции
МФТИ "Современные проблемы фундаментальных и прикладных наук": Часть III. Аэрофизика и космические исследования. Т. 2. – М.: МФТИ, 2010 – с. 48-50
35
14. Гамилов Т.М. Моделирование ауторегуляции сосудов. // Труды 54-й научной конференции МФТИ " Проблемы фундаментальных и прикладных естественных и технических
наук в современном информационном обществе": Аэрофизика и космические исследования. – М.: МФТИ, 2011 – с. 133-135
15. Симаков С.С., Василевский Ю.В., Холодов А.С., Саламатова В.Ю., Иванов Ю.А., Добросердова Т.К., Гамилов Т.М., Лейрих И.В. Численное моделирование глобальной гемодинамики при сосудистых патологиях и оценка интегральных характеристик. // Сборник
трудов первой международной научно-практической конференции «Высокие технологии, фундаментальные и прикладные исследования в физиологии и медицине». Т.4 –
Санкт-Петербург, издательство политихнического университета 2010 – с.152-153
16. Гамилов Т.М., Симаков С.С. Подходы к моделированию механизма ауторегуляции сосудов. // Сборник статей второй международной научно-практической конференции
«Высокие технологии, фундаментальные и прикладные исследования в физиологии и
медицине». Т.3 – Санкт-Петербург, издательство политехнического университета 2011 –
с.331
17. Гамилов Т.М. Моделирование механизма ауторегуляции кровеносных сосудов. // Тезисы докладов международной научной конференции по механике «Шестые поляховские
чтения» - Санкт-Петербург 2012 – с.256
18. A.S. Kholodov, S.S. Simakov, Y.N. Soe, T.M. Gamilov, Global blood flow and matter
transport in regulated cardiovascular network, Proceedings of the Instabilities and Control of
Excitable Networks: From Macro- to Nano-Systems: International Conference, Dolgoprudny,
Russia, 25-30 May, pp.49-50, Moscow: MAKS Press, 2012.
36
Приложение А (простые деревья).
1. Граф, состоящий из одной ветви, сила гравитации направлена против положительного
направления координаты. Характеристики ветви приведены на рисунке.
2. Граф, состоящий из пяти ветвей, поток движется слева направо. Сила гравитации действует против потока в ветви 3 и вдоль потока в ветви 5 (имитация «горки»), в остальных
ветвях гравитация предполагается нулевой. Ветви обладают одинаковыми характеристиками.
37
Приложение Б (дерево кровеносной системы человека).
Ниже приведено дерево кровеносной системы человека. На следующей странице
приведена таблица, в которой указаны параметры ветвей.
38
Параметры ветвей. L – длина, см; d – диаметр (артерии), см; R – сопротивление.
Параметр
c
(см.(4)) взят равным 900 см/с для артерий и 250 см/с для вен
№
L
D
R
№
L
d
R
№
L
D
R
1
4.0
2.76
10
32
14.4
0.57
1
63
5.0
0.8
500
2
2.0
2.56
1
33
5.0
0.48
100
64
5.0
0.85
100
3
3.4
1.25
1
34
14.4
0.57
1
65
6.0
0.6
100
4
20.8
0.74
1000
35
5.0
0.48
100
66
8.0
0.6
500
5
5.2
2.0
1
36
44.3
0.42
1
67
8.0
0.35
500
6
17.6
0.5
100
37
12.6
0.4
100
68
5.0
0.35
100
7
17.7
0.74
100
38
44.3
0.42
1
69
4.0
0.32
500
8
17.7
0.74
100
39
12.6
0.4
100
70
6.0
0.43
100
9
7.0
0.15
100
40
32.1
0.37
100
71
23.0
0.31
100
10
17.6
0.47
3000
41
34.3
0.28
100
72
6.0
0.17
100
11
17.7
0.46
3000
42
34.3
0.28
100
73
2.0
0.27
10000
12
8.0
1.1
100
43
32.1
0.37
100
74
2.0
0.2
1000
13
5.2
2.0
10
44
7.0
0.15
300
75
17.0
0.3
100
14
8.0
0.55
1000
45
7.0
0.15
100
76
8.0
0.2
1000
15
10.4
1.96
10
46
1.5
0.17
100
77
8.0
0.2
1000
16
5.3
1.56
10
47
1.5
0.17
100
78
2.0
0.26
100
17
2.0
0.78
100
48
5.0
0.85
100
79
4.0
0.13
500
18
6.6
0.46
1000
49
5.0
0.8
500
80
7.0
0.15
100
19
1.0
0.45
1000
50
8.0
1.1
100
81
1.5
0.17
100
20
6.3
0.55
100
51
8.0
0.6
500
82
7.0
0.15
500
21
7.1
0.36
1000
52
6.0
0.43
1
83
1.5
0.17
100
22
5.9
0.74
100
53
4.0
0.32
500
84
7.0
0.15
500
23
1.0
1.26
1
54
23.0
0.31
100
85
6.0
0.6
100
24
1.0
1.14
1
55
17.0
0.3
100
86
8.0
0.35
500
25
3.2
0.65
100
56
2.0
0.2
1000
87
5.0
0.53
100
26
10.6
0.94
1
57
2.0
0.27
10000 88
5.0
0.6
3000
27
3.2
0.45
100
58
6.0
0.17
100
89
5.0
0.4
3000
28
1.0
0.86
1
59
8.0
0.2
1000
90
5.0
0.6
3000
29
5.0
0.32
100
60
8.0
0.2
1000
91
5.0
0.4
3000
30
6.0
0.65
1
61
4.0
0.13
500
31
6.0
0.65
1
62
2.0
0.26
100
39
Моделирование распространения упругих волн конечными разностями и
исследование дисперсионных свойств схем высокого порядка аппроксимации
студент 4 курса 873 гр. ФУПМ
Ибрагимов Р.М.
5.1
ВВЕДЕНИЕ
В современной сейсмике существует ряд численных методов, которые позволяют
решать систему уравнений динамической теории упругости. На практике при выборе того
или иного метода руководствуются в первую очередь спецификой конкретной рассматриваемой задачи. Эта специфика диктует некоторый минимальный необходимый набор
свойств, которым должен удовлетворять применяемый численный алгоритм. В связи с чем
возникает задача по анализу алгоритма, одним из основных направлений которого, является дисперсионный анализ.
В трехмерном случае система уравнений изотропной упругости допускает, по
крайней мере, три решения в виде плоских волн: две S – волны и одну P – волну, которые
распространяются в среде с определенной фазовой скоростью, разной в численном и аналитическом случаях. Чем эта разница меньше, тем лучше выбранный численный алгоритм
моделирует реальный физический процесс. Это дает нам некий критерий по отбору численных алгоритмов. Зависимость фазовой скорости от направления распространения
определяется так называемым дисперсионным соотношением, а задача об оценке разницы
в скоростях в численном и аналитическом случаях называется задачей дисперсионного
анализа. Именно ей и была посвящена моя научно- исследовательская работа (НИР).
В качестве объекта исследований, были выбраны два численных метода, которые
находят решения уравнений упругости в анизотропном случае и которые отличаются способом дискретизации уравнений. Первый основан на так называемых полностью разнесенных сетках или сетках Лебедева; второй - использует обычные центральные разности
(схемы, применяемые в коде Navier). Cо вторым, в его упрощенном варианте для равномерного шага и прямоугольных сеток, я был знаком еще из Факультетского цикла “Вы40
числительной Математики”, поэтому необходимости в его повторном подробном изучении у меня не возникло, а вот первый был изучен из статей.
Поэтому, для того чтобы прочувствовать всю красоту, все тонкости и нюансы реализации этого алгоритма, на первом этапе, передо мной была поставлена задача об изучении его для двумерного случая и дальнейшей программной реализации (он переходит в
двумерном случае в схему Virieux и схему Levander-a), что вылилось в полноценную главу
данной работы.
Вторая же часть работы, которая по сути своей, и является самоцелью моей НИР,
полностью посвящена дисперсионному анализу этих методов!
ГЛАВА 1
МОДЕЛИРОВАНИЕ РАСПРОСТРАНЕНИЯ УПРУГИХ ВОЛН
КОНЕЧНЫМИ РАЗНОСТЯМИ
Цель работы – изучить численные методы решения системы уравнений динамической теории упругости, основанные на полностью разнесенных сетках.
41
5.2
1.1 ПОСТАНОВКА ЗАДАЧИ
Рассмотрим однородную изотропную линейную упругую среду в
двумерном случае, т.е. среду, для которой упругие параметры не меняется при переходе от одной её точки к другой, свойства среды по всем направлениям одинаковые, и
применим обобщенный закон Гука.
Тогда известно, что распространение упругих волн в такой среде
можно полностью описать с помощью системы уравнений динамической теории упругости, которая в декартовой прямоугольной системе координат с базисом ex , ez , выглядит следующим образом:
U
xx xz
t b x z
V
b xz zz
z
x
t
U
V
(*) xx 2
x
z
t
V
U
zz
t 2 z x
U V
xz
t
z x
или
в
операторном
виде
b Dx xx Dz xz
DU
t
b Dx xz Dz zz
DV
t
Dt xx 2 DxU DzV
Dt zz 2 DzV DxU
D D U D V
z
x
t xz
Где использованы следующие общепринятые обозначения:
U ,V
T
- вектор скоростей перемещений;
ij (i, j x, z ) - компоненты тензора напряжений;
b
1
( плотность рассматриваемой среды) - коэффициент плавучести
, коэффициенты Ламе среды
Заметим, что первые два уравнения этой системы, есть не что иное, как математическая формулировка второго закона Ньютона для частиц среды, а последние три
выражают собой закон Гука в однородном изотропном двумерном случае.
42
Заметим также, что условие однородности среды в таком случае переписывается в виде
( x, z ) const
( x, z ) const
( x, z ) const
т.е. не меняются при переходе от точки к точке среды
Понятно, что для того, чтобы решить полученную систему уравнений, нам
необходимо задать еще начальные и граничные условия:
Начальные условия:
В момент времени t 0 среда полагается находящейся в состоянии равновеV
0
сия, т.е. все напряжения и скорости полагаются нулевыми t 0
ij t 0 0
Граничные условия:
В зависимости от специфики рассматриваемой задачи можно ставить различные
граничные условия. Поэтому о конкретном их выборе будет рассказано в дальнейшем - в
разделе численных результатов.
Сделав такие предварительные замечания, приступим теперь к рассмотрению и
изучению конкретных численных алгоритмов, использующихся для решения задачи (*).
5.3
5.4
1.2. СХЕМА VIRIEX (Ot2, O2)
1.2.1 Шаблон разностной схемы
Элементарная ячейка пространственной сетки, использующаяся для данной разносной схемы, изображена на рисунке.
43
j
i
i+1
x
U
V
ii
j
xz
+1 z
Т.е. Различные компоненты
вектора скорости, вычисляются в
различных узлах пространственной
сетки, так же как и различные компоненты тензора напряжений.
Кроме всего прочего, аналогичная разнесенность наблюдается
и по времени. Именно по этому,
Тогда разностная
схема,
построенная на заданном шаблоне, которая и называется
подобного
рода схемы
получили
схемой
Virieux,
для системы
(*) записывается следующим образом:
название
полностью
разнесенных.
k
D U k 0.5 b( D k
t
x
xx i 0.5, j Dz xz i , j 0.5 );
i
,
j
k 0.5
k
k
D
V
b
(
D
D
);
t
x
xz
z
zz
i
0.5,
j
0.5
i
1,
j
0.5
i
0.5, j 1
k 1
k 0.5
k 0.5
Dt xx i 0.5, j 2 Dx U i 1, j Dz V i 0.5, j 0.5 ; (*N)
k 1
k 0.5
k 0.5
Dt zz i 0.5, j 2 Dz V i 0.5, j 0.5 Dx U i 1, j ;
Dt xz k 1 Dz U k 0.5 Dx V k 0.5
;
i , j 0.5
i , j 1
i 0.5, j 0.5
Здесь использованы следующие операторные обозначения для производных:
fi ,kj fi ,kj1
k
Dt fi , j Dt f (ihx , jhz , k )
k
шаг временной сетки
fi , j fi k1, j
k
где
Dx fi , j Dt f (ihx , jhz , kht )
hx
hx , hz шаги пространственной сетки
fk fk
Dz fi ,kj Dt f (ihx , jhz , kht ) i , j i , j 1
hz
44
Таким образом, численные скорости U ,V в момент времени k 0.5 и компоненты тензора напряжений xx , zz , xz в момент времени
k 1 , вычисляются явно с
помощью скоростей в момент времени k 0.5 и напряжений в момент времени k .
5.5
1.2.2 Характеристики схемы:
Аппроксимация:
С помощью разложения в ряд Тейлора действия разностных операторов
Di , i t , x, z на соответствующие функции, можно получить, что порядок аппроксимации
схемы Virieux второй как по пространству, так и по времени, т.е. O( 2 , hx2 , hz2 ) .
Устойчивость:
Исследуя полученную разностную схему на устойчивость спектральным признаком, получаем следующие условия на устойчивость:
1 1
1
hx2 hz2
Vp
Или, в предположении что hx hz h , получаем:
Где
V
2
p
V p скорость
V p
распространения
h
1
(1V)
2
P
–
волны
в
рассматриваемой
среде
b 2 .
Таким образом, при выполнении условия (1V), должна иметь место сходи-
мость численного решения (*N) к точному решению (*), со скоростью квадратичной по
времени и по пространству.
Приступим теперь к изучению схемы, которая строится по тому же принципу, что
и схема Virieux, но имеет четвертый, т.е. более высокий, порядок аппроксимации по пространству.
Впервые данная разностная схема была предложена и подробно исследована R.
Levander-ом, поэтому и носит название схемы Levander-а
45
5.6
1.3. СХЕМА LEVADER-а (Ot2,O4)
1.3.1 Шаблон разностной схемы
5.7
Пространственный шаблон для вычисления компонент вектора скорости
x
(m
z
(m,n)
+1,n)
(m+
(m,n+1)
1,n+1)
Горизонтальная компонента
вектора скорости (U)
Вертикальная
компонента
вектора скорости (V)
( ii )
Нормальные
напряжения
Касательные
напряжения
( xz )
Пространственный
шаблон
для вы- в
Кроме того, аналогично схеме Virieux, компоненты
вектора скорости
определяются
числения
напряжений
моменты времени k 0.5 ht и k 0.5 ht , а компоненты
тензора
напряжений в моменты времеx
ни kht и k 1 ht .
Тогда, разностная схемы Levander-a, которая строится на заданном шаблоне, будет иметь
(
вид:
z
D U
b( Dx xx m 0.5,n Dz xz m ,n 0.5 );
m,n
t
k
k
D V k 0.5
t m 0.5,n 0.5 b( Dx xz m ,n 0.5 Dz zz m 0.5,n );
k
k 0.5
k 0.5
Dt xx m 0.5,n 2 Dx U m ,n Dz V m 0.5,n 0.5 ; (*L)
k 0.5
k
m,n)
(m+
1,n)
k
46
(m
,n+1)
(m+
1,n+1)
47
1.3.2 Характеристики схемы:
5.8
Аппроксимация:
С помощью разложения в ряд Тейлора действия разностных операторов
Di , i t , x, z на соответствующие функции, можно получить, что порядок аппроксимации
схемы Levander-a второй по времени и четвертый по пространству, т.е. O( 2 , hx4 , hz4 ) .
(
с1
Заметим
также,
что
на
самом
деле
значение
коэффициентов
1
9
и с2 находятся из условия обеспечения четвертого порядка аппроксимации
24
8
по пространству)
Устойчивость:
Исследуя полученную разностную схему на устойчивость спектральным признаком, при этом полагая что hx hz h , получаем следующие условия на устойчивость:
Vp
c1 c2 1
h
Или:
Где
V
2
p
V p скорость
Vp
h
0.655 (1L)
распространения
P
–
волны
в
рассматриваемой
среде
b 2 .
Таким образом, при выполнении условия (1L), должна иметь место сходи-
мость численного решения (*L) к точному решению (*), со скоростью квадратичной по
времени и четвертого порядка пространству.
5.9
5.10
1.4.ЧИСЛЕННЫЕ РЕЗУЛЬТАТЫ
1.4.1 Параметры рассматриваемой среды
Прежде чем переходить к конкретным численным результатам, формализуем область и среду, для которой будет решаться (*).
Упругие свойства среды:
Будем рассматривать среду, с плотность 2600 кг/м3 и параметрами Ламэ, такими
что:
Vp b( 2 ) 3000 м
с ( -значения параметров взяты такими же, как в [1] и [2])
Vs b 2000 м
с
Геометрия задачи:
Для простоты, считаем что область в которой решается (*) - квадрат со сторонами
Lx 1000 м
т. е, эту область можно изобразить следующим образом
Lz 1000 м
0
1
000
X
,м
1
000
Z
,м
Приступим теперь к тестированию численных алгоритмов (*N) и (*L).
1.4.2. Тест на плоские волны
5.11
5.12
1.4.2.1Описание теста:
Знаем, что (*) допускает, по крайней мере, два решения в виде плоских волн
– P и S волну, каждая из которых распространяется в среде со скоростями соответственно
Vp и Vs . Тогда, эти решения можно использовать для проверки правильности расчетной
программы. Действительно, зная эти аналитические решения, мы тем самым можем определить, какие необходимо поставить начальные и граничные условия в задаче (*) для того,
чтобы получились эти решения. И, если в результате расчетов получается численное решение, которое с необходимой скоростью сходится к аналитическому (а оно нам известно), то не остается сомнений, что расчетная программа действительно работает правильно.
Я в своей работе в качестве такой плоской волны выбирал P – волну: (
kx
z
2
)
10
2
S x sin cos L z cos x sin V pt
S cos cos 2 z cos x sin V t
p
z
L
Где (S x , S z ) компоненты вектора перемещений
49
Используя это и систему уравнений динамической теории упругости в терминах
перемещений
и
напряжений,
получаем:
S x 2
2
U ( x, z , t ) t L sin sin L z cos x sin V p t
S z 2
2
cos sin z cos x sin V pt
V ( x, z , t )
t
L
L
2
( x, z , t ) ( 2 ) S x S z V U 2 Vs V cos
p
xx
x
x
sin
Vp
S x
Vs2
S z
U
V p
2
U sin
zz ( x, z , t ) ( 2 )
z
x
sin
Vp
V2
S S
xz ( x, z , t ) x z 2 s V sin
x
Vp
z
(1000, 0)
(0,1000)
Далее подставляя в полученное решение значения t = 0 и (x,z) =
полу(1000,1000)
(0, 0)
чаем соответственно начальные и граничные условия для задачи (*) и для задач (*N) и
(*L)
(Я не стал их тут выписывать в силу их громоздкости).
5.13
1.4.2.2 Результаты работы для схемы Virieux
Сходимость к аналитическому решению:
Число Куранта фиксируется 0.25 .
Решение выводится в момент времени T = 0.33с.
Под невязкой решения мы в дальнейшем полагаем следующее:
f max f analit ( x, z, T ) f numerical ( x, z, T )
( x, z )
Таблица изменения невязок, в зависимости от количества узлов расчетной сетки
для скорости U
Число узлов сетки по
пространству
25
Невязка для скорости
U
0.2002
Отношение невязок
соседних приближений
50
50
0.0499
4.012
100
0.0125
3.992
200
0.0031
4.032
7.8* 104
400
4.026
( Результаты для второй компоненты скорости и компонент тензора напряжений
аналогичные, поэтому я не стал их приводить в данной работе)
Таким образом, из этой таблицы отчетливо видно, что при дроблении пространственного и временных шагов в два раза, отличие численного решения от аналитического
падает в 4 раза, что и должно наблюдаться для схемы порядка O(t 2 , h2 ) . Таким образом,
реализованный численный алгоритм выдерживает тест на плоские волны!
5.14
1.4.2.3 Результаты работы для схемы Levander-a
Сходимость к аналитическому решению:
Аналогично схеме Virieux: 0.25
Решение выводится в момент времени T = 0.33с.
При расчетах шаг по пространству дробится в два раза, а шаг по времени в четыре.
Под невязкой решения мы в дальнейшем полагаем следующее:
f max f analit ( x, z, T ) f numerical ( x, z, T )
( x, z )
Таблица изменения невязок, в зависимости от количества узлов расчетной сетки
для скорости U
Число узлов
Число узлов
сетки по простран-
сетки по времени
Невязка для
скорости U
Отношение невязок соседних прибли-
51
ству
жений
25
100
0.2450
-
50
400
0.0153
16.0
100
1600
9.4*104
16.2
Аналогично предыдущему случаю данные таблица указывают на то, что при дроблении пространственного шага в два раза, а временного в четыре, отличие численного решения от аналитического падает в 16 раз, что и должно наблюдаться для схемы порядка O(t 2 , h4 ) . Таким образом, реализованный численный алгоритм выдерживает тест на
плоские волны.
Проверим теперь работоспособность наших численных алгоритмов на более сложном тесте: тесте с источником.
5.15
1.4.3. Тест с источником типа взрыва
5.16
1.4.3.1 Моделирование источника:
В своей работе, я использовал взрывной источник (руководствуясь [1], где был
выбран именно такой тип источника). И для его моделирования использовал Гауссиану по
времени, и градиент Гауссианы по пространству. Заметим, что формальное введение источника в задачу осуществляется с помощью добавления соответствующих членов впервые два уравнения (*) ( т.е. во второй закон Ньютона для частиц среды).
Кроме всего прочего, для упрощения расчетов и наглядности результатов я располагал источник в центре среды.
52
Начальные условия – нулевые. Граничные – периодические, с периодом равным
геометрическим размерам задачи (т.е. Lx = Lz = 1000).
Прежде чем приступить к демонстрации результатов, хотелось бы отметить, как
выбирать параметры Гауссианы для достижения наибольшей “реалистичности” моделирования.
Имеем, математическое выражение Гауссианы по времени: f (t ) e (t t0 ) , где
2
1
2 2
, а характеризует собой среднеквадратичное отклонение точек Гауссианы от
максимума (заметим, что максимум наблюдается в точке t t0 ).
Таким образом, можно считать, что
длине волны возмущения, распространя-
ющейся от источника. С другой стороны, хорошо известно, что при численном моделировании возмущений, для достижения реалистичности результатов, необходимо, чтобы на
длину волны возмущения приходилось по крайней мере 10 узлов расчетной сетки (это
условие следует из дисперсионного анализа задачи, основные аспекты которого будут
весьма подробно рассмотрены во второй части моей работы)
Поэтому, экспериментируя с шириной Гауссианы (которую естественно считать
равной длине волны возмущения), и учитывая, что при обсчете задачи сеточные парамет-
h 10 м
ры
(h, шаги пространственной и временной сеток соответственно) , полу 0.001c
временная 400
чил, что оптимальные значения
.
4
пространственная 10
Параметр t0 вводится в задачу для того, чтобы отразить тот факт, что в
начальный момент времени среда полагается находящейся в состоянии равновесия и, таким образом, амплитуда возмущения вначале должна быть ничтожно малой. А в дальнейшем нарастать (соответственно по Гауссиане). При выборе этого параметра я также
руководствовался правилом, что от нулевого момента времени до момента, когда амплитуда возмущения существенно вырастет, должно пройти, по крайней мере
10 20 .
t 0.2 для схемы Viriex
Конкретное число которое используется в расчетах: 0
t0 0.08 для схемы Levander-a
5.17
1.4.3.2 Результаты работы для схемы Virieux:
Сеточная сходимость:
53
Шаг по пространству и по времени на каждом измельчении сетки дробится в три
раза (это связано с тем, что имеется разнесенность по времени);
Решение выводится в момент времени T=0.33c.
xист , zист (500 м,500 м)
временная 400
Параметры источника:
4
пространственная 10
t0 0.2c
Под невязкой решения на n-ом дроблении в момент времени T мы в дальнейшем
полагаем следующее:
n
n 1
nf max f numerical
( x, z, T ) f numerical
( x, z, T )
( x, z )
Таблица изменения невязок, в зависимости от количества узлов расчетной сетки
для скорости U
Число узлов сетки
Невязка для скорости U
по пространству
Отношение невязок соседних приближений
25
-
-
75
0.23710
-
225
0.02659
8.917
625
0.00294
9.0406
Таким образом, видим, что при дроблении пространственного и временного шага в
три раза отличие решений соседних итераций уменьшается в 32 раз, что и должно наблюдаться для схем порядка аппроксимации O(t 2 , h2 ) .
54
Т.е., реализованный численный алгоритм, основанный на схеме Virieux, выдержал
тест и на сеточную сходимость!
5.18
1.4.3.2 Результаты работы для схемы Levander-а:
Параметры расчетов точно такие же, как и для схемы Virieux, кроме момента вывода решения. Здесь T = 0.165c.
Шаг по пространству на каждом мельчении сетки дробится в три раза, шаг по
времени в 9.
Таблица изменения невязок, в зависимости от количества узлов расчетной сетки
для скорости U
Число узлов
Число узлов
сетки по простран-
сетки по времени
Невязка для
скорости U
ству
Отношение невязок соседних приближений
25
50
-
-
75
450
0.1762
-
225
4050
0.0022
80.97
Таким образом, видим, что при дроблении пространственного шага в три раза, а
временного в 9, отличие решений соседних итераций уменьшается в 34 раз, что и должно
наблюдаться для схем порядка аппроксимации O(t 2 , h4 ) .
Т.е. реализованный численный алгоритм, основанный на схеме Levander –a выдержал, тест и на сеточную сходимость!
55
5.19
1.5 ВЫВОДЫ
На первом этапе моей НИР ставилась задача освоения и численного исследования
методов решения системы уравнений упругости, использующих полностью разнесенные
сетки. Мною изучены схемы Virieux и Levander, разработаны и реализованы на MATLABe соответствующие алгоритмы. Получены результаты по устойчивости и точности этих
численных методов: причем как по сходимости к аналитическому решению, так и по сеточной сходимости. Кроме того, был освоен один из методов введения точечного взрывного источника в задачу, который весьма часто встречается в сейсмике.
56
ГЛАВА 2
ИССЛЕДОВАНИЕ ДИСПЕРСИОННЫХ СВОЙСТВ СХЕМ ВЫСОКОГО ПРОРЯДКА АППРОКСИМАЦИИ
Цель работы – исследовать дисперсионные свойства схем высокого порядка
аппроксимации в изотропном и анизотропном случаях.
5.20
2.1 ДИСПЕРСИОННОЕ СООТНОШЕНИЕ
Рассмотрим систему уравнений динамической теории упругости в трехмерном
случае для произвольной однородной среды в терминах скоростей перемещений.
Знаем, что в декартовой прямоугольной системе координат с базисными векторами
e , e , e она записывается следующим образом:
x
y
z
DtU x Dx xx Dy xy Dz xz
DtU y Dx xy Dy yy Dz yz
D U D D D
x xz
y yz
z zz
t z
DxU x
xx
(*)
yy
DyU y
D
U
z z
D zz C
t
66
xy
DxU y DyU x
xz
DzU x DxU z
D
U
D
U
yz
z
y
y
z
Использованы обозначения:
U ,U
x
,U z
T
y
компонены вектора скоростей
перемещений
C66
матрица упругих модулей
(или матрица Гука)
ij i,j= x, y, z компоненты тензора напряжений
Di i t , x, y, z оператор дифференцирования по i
57
Нам необходимо определить из этой системы, какова будет фазовая скорость распространения плоской волны в среде. Зависимость её от волнового вектора, т.е. Vф
-
k
носит название дисперсионного соотношения.
Проведем вывод этого соотношения, не формализуя пока действия операторов
дифференцирования. Это позволит нам, получить его в самом общем виде, т.е. для любого
типа операторов дифференцирования (которые естественно разные для численного и аналитического случая и варьируются при переходе от одного численного метода к другому).
Приступим собственно к этому выводу.
Давайте исключим из первых трех уравнений (*) компоненты тензора напряжений.
xx 1
yy 2
zz
Введем обозначения: 3 .
xy 4
xz 5
yz 6
Подействуем на первые три уравнения систем (*) оператором дифференцирования
по времени. Тогда получаем:
DttU x Dtx 1 Dty 4 Dtz 5
Тут и всюду в дальнейшем, если не оговорено
(**)
D
U
D
D
D
tt y
tx 4
ty 2
tz 6
противного, под Dij будет подразумеваться Di D j
D U D D D
tx 5
ty 6
tz 3
tt z
Таким образом, нам необходимо выразить из последних 6 уравнений (*)
Dti j как функции Dmn m,n t и U x ,U y ,U z и подставить их в (**). Давайте проделаем
это:
Имеем:
Dxt 1 c11DxxU x c12 DxyU y c13 DxzU z c14 DxxU y DxyU x c15 DxzU x DxxU z c16 DxzU y DxyU z
c11 Dxx c14 Dxy c15 Dxz U x c14 Dxx c12 Dxy c16 Dxz U y c15 Dxx c16 Dxy c13 Dxz U z
Поступая аналогично для всех остальных Dti j , получаем:
D jt i ci1D jx ci 4 D jy ci 5 D jz U x ci 4 D jx ci 2 D jy ci 6 D jz U y ci 5 D jx ci 6 D jy ci 3 D jz U z
j x, y , z
Подставляя полученное соотношение в (**), получаем:
58
U x
U x
Dtt U y A33 U y (***)
U z
U z
Причем компоненты матрица A определяются следующим образом:
Введем в рассмотрение множества индексов:
1
k 2
3
(1,1)
(i, j ) (4, 2)
(5,3)
1(k ) ci1 D jx ci 4 D jy ci 5 D jz
(4,1)
(i, j ) (2, 2) ; l (k ) 2(k ) ci 4 D jx ci 2 D jy ci 6 D jz . Тогда akl l (k ) (*A)
( i , j )k
(6,3)
3(k ) ci 5 D jx ci 6 D jy ci 3 D jz
(5,1)
(i, j ) (6, 2)
(3,3)
Таким образом, задача определения дисперсионного соотношения, свелась к задаче
вычисления собственных значений матрица A33 , элементы которой определяются с помощью соотношения (*A) и зависят от собственных значений операторов Dij .
Следовательно, для каждого конкретного случая, для получения дисперсионного
соотношения, необходимо уметь вычислять собственные значения операторов дифференцирования Dij .
59
2.2 АНАЛИТИЧЕСКИЙ СЛУЧАЙ
5.21
Для аналитического случая имеем Dij f
f
. Тогда, подставляя сюда выражение
ij
U x
2
i t k x x k y y k z z
i t k r
e
, где k волновой вектор k
для плоской волны U U y e
U
z
,
Dtt U (i ) 2U
tt (i ) 2
получаем: Dii U (iki ) 2U ; i = x,y,z
l , j x, y, z
ll (ikl ) 2
(ik )(ik )
l
j
lj
Dij U (iki )(ik j )U ; i,j = x,y,z
Всюду в дальнейшем мы будем работать в декартовой прямоугольной системе координат, поэтому перепишем эти равенства сразу в координатном виде:
xx k cos 2 cos 2
xy yx 0.5 k cos 2 sin 2
yy k cos 2 sin 2
xz zx 0.5 k cos 2 sin 2
yy k sin 2
yz zy 0.5 k sin sin 2
2
z
2
k
2
2
2
2
y
x
Обратимся теперь к схемам на Лебедевских сетках. Отмечу заранее, что мною будут
рассматриваться только сетки с одинаковыми шагами по всем пространственным направлениям и шаг этот я буду обозначать через h .
5.22
2.3 АППРОКСИМАЦИЯ РАЗНОСТНЫХ ОПЕРАТОРОВ НА ЛЕБЕДЕВСКИХ СЕТКАХ
Лебедевские сетки позволяют обобщить рассмотренные в первой части этой работы полностью разнесенные сетки на случай дискретизации уравнений в анизотропных
средах, см. [5]. Элементарная ячейка сетки в случае Лебедевских схем может быть представлена в следующем виде:
60
Компоненты вектора скорости вычисляются в ромбах.
Компоненты
тензора
напряжений в кружках
Заметим что, разнесение по времени точно такое же, как это было в схемах Virieux
и Levander-a. ( Т.е. компоненты вектора скорости определяются в моменты времени
k 0.5 ht
и
k 0.5 ht ,
а компоненты тензора напряжений в моменты времени kht и
k 1 ht ).
Тогда, действие разностного оператора численного дифференцирования по направления b
he
(где e соответствующий базисный вектор декартовой прямоугольной си2
стемы координат), можно записать следующим образом:
DbU t , x
1 M
cmM U t , x (2m 1)b U t , x (2m 1)b (1)
h m1
Здесь p 2M – порядок аппроксимации рассматриваемой схемы, а коэффициенты
cmM подбираются таким образом, чтобы этот порядок обеспечить. О том, как вычисляются
эти коэффициенты, будет рассказано чуть ниже.
( Отметим, что подход, который я использовал в этой работе, взят из [4])
Таким образом, осталось определить действие этих разностных операторов на
плоскую волну: U (t , x, y, z ) e
i t k r
e
i t k x x k y y k z z
(Обозначения такие же, как и для аналитического случая, - шаг временной сетки).
Имеем:
1
2i
Dt U (t , x) U (t , x) U (t , x) sin
2
2
2
U (t , x)
2i
sin 2
2
2
Leb
tt
T
61
Используя (1), для операторов дифференцирования по пространству получаем:
2i M
hk
De U t , x
cmM sin 2m 1 i U t , x
i
2
h m1
где ei i ый базисный вектор
Тогда:
Leb
ij
2
hk j
hki M
2i M
c
sin
2
m
1
cmM sin 2m 1
mM
2 m1
2
h m1
S
Таким образом, для того чтобы уметь вычислять ijLeb для схем произвольного порядка аппроксимации, нам необходимо уметь вычислять коэффициенты cmM .
Вывод коэффициентов cmM :
Без потери общности, осуществим вывод, рассматривая действие оператора Db
вдоль направления b =
he x
, на произвольную функцию U (t , x) Имеем:
2
1 M
h
h
D
U
t
,
x
cmM U t , x (2m 1) , y, z U t , x (2m 1) , y, z
(D)
ex
h
2
2
m
1
k
2M
(k )
h
h 1
U
t
,
x
(2
m
1)
,
y
,
z
U
t
,
x
2
m
1
U
t
,
x
O h 2 M 1
(+)
x
2
2
k
!
k 1
k
2M
(k )
h
h 1
U t , x (2m 1) , y, z U t , x (1) k
2
m
1
U t , x x O h 2 M 1 ()
2
2 k!
k 1
( Тут введено обозначение
kU t , x
(k )
U t , x )
x
x k
x x
Тогда:
M 1
h
() () 2m 1
2
l 0
2l 1
(2 l 1)
2
U t, x
O h 2 M 1
x
(2l 1)!
Подставляя полученное выражение в (D), и учитывая тот факт, что должно быть вы-
полнено DexU t , x, y, z U (t , x) O h 2 M 1 , методом неопределенных коэффициентов
x
получаем:
2 l 1
M
2m 1
0, l 1, M 1
cmM
m 1
(2l 1)!
(С)
M
c
mM 2m 1 1
m 1
62
Таким образом, для произвольного порядка аппроксимации схемы на Лебедевских
сетках p 2M , используя (С), находятся cmM . По известным значениям cmM , с помощью
T
и
S
вычисляются собственные значения ttLeb и ijLeb соответсвенно. Под-
ставляя их в (*A) и вычисляя собственные значения матрицы A33 мы тем самым получаем
искомое дисперсионное соотношение!
5.23
2.4 АППРОКСИМАЦИЯ РАЗНОСТНЫХ ОПЕРАТОРОВ ДЛЯ СХЕМ НА
НЕРАЗНЕСЕННЫХ СЕТКАХ (СХЕМЫ КОДА NAVIER)
Схемы кода Navier решают систему трех уравнений упругости для перемещений
(т.н. волновое уравнение Навье). Это схемы, в которых для аппроксимации разностных
операторов, используются обычные центральные разности. Таким образом, для такого типа схем:
Для оператора дифференцирования по времени:
Dtt U (t , x)
1
2
U (t , x) 2U (t, x) U (t , x) 4 sin
2
ttNav
2
2
U (t , x)
N
sin 2
T
2
4
2
Для операторов дифференцирования по пространству порядка аппроксимации
p 2M :
1 mM
D
U
(
t
,
x
)
mM U (t , x mhei ) U (t, x mhei )
ii
h 2 m0
1
Dij U (t , x) D D U (t , x), i j
2
1
e
ei e j
2
Где e и e определяются следующим образом:
e 1 e e
i
j
2
( Коэффициенты mM , аналогично случаю Лебедевских сеток, подбираются таким
образом, чтобы этот порядок обеспечить.)
Подставляя сюда в качестве U (t , x) плоскую волну, получаем:
63
2 M
1
Nav
cos mhki 0
ii
2 mM
h m 1
2
NS
M
Nav 1 sin mhk sin mhk
mM
i
i
ij
h 2 m 1
Вывод коэффициентов mM :
Без потери общности вывод осуществим, на примере действия оператора Dxx .
Имеем:
1 M
D
U
t
,
x
(DN)
mM U (t , x mh, y, z ) U (t , x mh, y, z )
xx
h 2 m1
2M
(k )
k 1
U t , x O h 2 M 1
(+)
U t , x mh, y, z U t , x mh
x
k!
k 1
2M
(k )
k 1
k
U t , x O h 2 M 1 ( )
U t , x mh, y, z U t , x (1) mh
x
k!
k 1
Тогда:
M
( N ) ( N ) mh
l 0
2l
(2 l )
2
U t , x O h 2 M 1
x
(2l )!
Подставляя полученное выражение в (DN), и учитывая тот факт, что должно быть
выполнено DxxU t , x, y, z U (t , x) O h 2 M 1 , методом неопределенных коэффициxx
ентов получаем:
M
2l
mM m 0, l 2, M
m 1
M
2
( )
mM m 1
m
1
M
0 M 2 mM
m 1
Таким образом, для произвольного порядка аппроксимации p 2M схемы кода
Navier, действуя по тому же алгоритму, что был представлен для Лебедевских схем, получаем необходимое нам дисперсионное соотношение.
Замечу также, что формальным результатом описанных мною выкладок, явилась
программа, которая, получая на вход матрицу Гука C66 , и порядок аппроксимации рассматриваемой разностной схемы, вычисляет дисперсионные соотношения.
Приступим теперь к проверке полученных выкладок.
64
5.24
5.25
5.26
5.27
5.28
2.5.ИЗОТРОПНЫЙ СЛУЧАЙ
2.5.1 Матрица Гука
5.29
Понятно, что на начальном этапе, для проверки правильности работы программы
следует выбрать среду простой конфигурации, для которой известна матрица упругих модулей C66 . Самым удобным для такой проверки, является случай, когда рассматриваемая
среда однородна и изотропна. Тогда все упругие свойства среды полностью определяются
двумя параметрами , параметрами Ламэ среды
2
2
2
С66
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Кроме того, знаем что в таком слу0
чае
система (*) допускает по крайней ме0
ре три решения в виде плоских волн – две
0
0S – волны и одну P – волну, скорости ко0
V b( 2 )
торых
определяются как p
Vs b
Поэтому, передавая в качестве входных параметров в программу такую матрицу, для
аналитического случая должны быть получены, и были получены, точные значения скоростей Vp ,Vs .
5.30
2.5.2 О представлении результатов
Суть дисперсионного анализа, состоит в сравнении фазовых скоростей распространения плоской волны в численном и аналитическом случаях: чем эта разница меньше –
тем ближе и лучше рассматриваемый численный алгоритм моделирует реально наблюдаемый физический процесс.
65
Поэтому, при анализе дисперсионных свойств методов, поступают следующим образом:
(h) (h)
V
k
Введем обозначения:
( analit )
V ( analit ) V
k
k
Тогда,
есть
функция
следующих
Где
V ( h ) -скорость
V (h)
и 1
.
V распространения плоской
волны в численном случае
аргументов:
( , , H , ) ,
где
( , ) направление распространения рассматриваемой волны в сферической системе ко-
ординат ( , ; 0, 2 ), H т.е. число узлов сетки, которое приходится на
h
2 2
одну длину волны,
Vp
h
число Куранта, рассматриваемого численного метода.
Зафиксировав H и , мы, тем самым, получаем, что , как функция , , задает
в трехмерном пространстве некую поверхность, каждая точка которой, есть отличие фазовой скорости аналитической от фазовой скорости численной вдоль этого направления.
Поверхность эта носит название поверхности численной анизотропии или дисперсионной
картины, и является весьма удобной и наглядной при изучении дисперсионных свойств
разностных алгоритмов. Поэтому, всюду в дальнейшем, результаты будут представлены
именно в такой форме.
Замечу также, что в силу симметричности поверхности численной анизотропии относительно координатных плоскостей, достаточно рассматривать только один её октант.
Используемые обозначения:
Здесь, и всюду в дальнейшем:
OP – порядок аппроксимации схемы по пространству (например O2 – второй порядок)
OtP – порядок аппроксимации схемы по времени
Если указано, что рассматривается порядок по времени Otinf, то при расчете дисперсионного соотношения для данного случая вместо собственного числа разностного
оператора дифференцирования по времени использовалось собственное число аналитического. Фактически это означает, что временная дисперсия нулевая, и рассматривается
только пространственная.
Выбор параметров расчета:
66
Знаем для Лебедевских схем: Leb
1
M
3 cmM
Nav поэтому всюду в дальней-
m 1
шем
при
расчетах,
я
фиксирую
0.8 Leb .
То-
0.4619 для схемы порядка аппроксимации O2
гда: 0.3959 для схемы порядка аппроксимации O4
0.3591 для схемы порядка аппроксимации O8
Параметры среды полагаются следующими: Vp 2000
м
м
кг
, Vs 1000 , = 3000 3
с
с
м
H фиксируется: H 10 .
Отмечу, что при выборе этих параметров и коэффициента 0.8 при определении я
руководствовался тем, что необходимо проверить работоспособность написанной мною
программы и, следовательно, сравнить результаты с уже имеющимися. Поэтому я выбрал
параметры задачи в точности такими же, как в [4].
5.31
5.32
5.33
5.34
5.35
5.36
5.37
5.38
5.39
5.40
67
2.5.3. ДИСПЕРСИОННЫЕ КАРТИНЫ
5.41
5.42
2.5.3.1СХЕМА НА ЛЕБЕДЕВСКИХ СЕТКАХ
Поверхности численной анизотропии для скорости min Vs
Слева направо, порядок аппроксимации схемы по пространству O2, O4, O8
Порядок по времени Ot2
max ( , ) 1.553 10
2
( , )
max ( , ) 5. 283 10
max ( , ) 3. 779 10
4
( , )
4
( , )
Порядок по времени Otinf:
68
max ( , ) 1. 637 10
max ( , ) 7. 136 10
2
( , )
max ( , ) 2. 686 10
4
( , )
6
( , )
max ε(α,β) для различных порядков схем для скорости minVs
(α,β)
O2
O4
O8
Ot2
1.553 102
3.779 104
5.283 104
Otinf
1.637 102
7.136 104
2.686 106
Поверхности численной анизотропии для скорости max Vs
69
Слева направо, порядок аппроксимации схемы по пространству O2, O4, O8
Порядок по времени Ot2
max ( , ) 1.553 10
2
( , )
max ( , ) 5. 283 10
max ( , ) 3. 779 10
4
( , )
4
( , )
Порядок по времени Otinf:
max ( , ) 1. 637 10
( , )
max ( , ) 2. 689 10
2
max ( , ) 7.136 10
4
( , )
6
( , )
70
max ε(α,β) для различных порядков схем для скорости maxVs
(α,β)
O2
O4
O8
Ot2
1.553 102
3.78 104
5.283 104
Otinf
1.637 102
7.136 104
2.689 106
Поверхности численной анизотропии для скорости V p
Слева направо, порядок аппроксимации схемы по пространству O2, O4, O8
Порядок по времени Ot2
max ( , ) 1. 300 10
2
( , )
max ( , ) 2. 130 10
max ( , ) 1. 990 10
3
( , )
3
( , )
Порядок по времени Otinf:
71
max ( , ) 1. 637 10
max ( , ) 7. 136 10
2
( , )
max ( , ) 2. 674 10
4
( , )
6
( , )
max ε(α,β) для различных порядков схем для скорости Vp
(α,β)
O2
O4
O8
Ot2
1.300 102
1.99 104
1.754 104
Otinf
1.637 102
7.136 104
2.674 106
72
5.43
2.5.3.2 СХЕМА КОДА NAVIER
Поверхности численной анизотропии для скорости min Vs
Слева направо, порядок аппроксимации схемы по пространству O2, O4, O8
Порядок по времени Ot2
max ( , ) 1.553 10
2
( , )
max ( , ) 5. 275 10
max ( , ) 1. 105 10
3
( , )
4
( , )
Порядок по времени Otinf:
73
max ( , ) 1. 637 10
max ( , ) 8. 363 10
2
( , )
max ( , ) 6. 085 10
4
( , )
4
( , )
max ε(α,β) для различных порядков схем для скорости minVs
(α,β)
O2
O4
O8
Ot2
1.553 102
1.105 104
5.275 104
Otinf
1.637 102
8.363 104
6.085 106
Поверхности численной анизотропии для скорости max Vs
Слева направо, порядок аппроксимации схемы по пространству O2, O4, O8
74
Порядок по времени Ot2
max ( , ) 2. 067 10
2
( , )
max ( , ) 5. 275 10
max ( , ) 3. 646 10
4
( , )
4
( , )
Порядок по времени Otinf:
max ( , ) 1. 995 10
( , )
max ( , ) 5. 600 10
2
max ( , ) 3. 151 10
4
( , )
4
( , )
75
max ε(α,β) для различных порядков схем для скорости maxVs
(α,β)
O2
O4
O8
Ot2
2.067 102
3.646 103
5.275 104
Otinf
1.995 102
3.151103
5.600 106
Поверхности численной анизотропии для скорости V p
Слева направо, порядок аппроксимации схемы по пространству O2, O4, O8
Порядок по времени Ot2
max ( , ) 1. 300 10
2
( , )
max ( , ) 2. 130 10
max ( , ) 1. 754 10
3
( , )
4
( , )
Порядок по времени Otinf:
76
max ( , ) 1. 637 10
max ( , ) 1. 023 10
2
( , )
max ( , ) 1. 425 10
3
( , )
5
( , )
max ε(α,β) для различных порядков схем для скорости Vp
(α,β)
O2
O4
O8
Ot2
1.300 102
1.754 103
2.130 103
Otinf
1.637 102
1.023 103
1.425 105
77
5.44
2.5.4 Сравнение результатов работы двух схем
Сводная таблица maxε(α,β) для различных порядков схем для скоростей Vp ,Vs
(α,β)
СХЕМА НА ЛЕБЕДЕВСКИХ СЕТКАХ
O2
O4
min Vs
Vp
2
O
1.3 10
O
1.637 10
max Vs
O8
min Vs
Vp
1.553 10
2
1.553 10
2
1.99 10
3
1.637 10
2
1.637 10
2
7.136 10
3.779 10
max Vs
min Vs
Vp
4
3.780 10
4
7.136 10
max Vs
4
2.130 10
3
5.283 10
4
5.283 10
4
2.674 10
6
2.686 10
4
6
2.689 10
t2
2
4
7.136 10
6
tinf
СХЕМА КОДА NAVIER
O2
O4
min Vs
Vp
2
O
1.3 10
O
1.637 10
max Vs
min Vs
Vp
1.553 10
2
2.067 10
1.637 10
2
1.995 10
2
O8
max Vs
1.754 10
3
3.646 10
1.023 10
3
8.363 10
min Vs
Vp
4
1.105 10
4
2.130 10
4
3.151 10
3
1.425 10
max Vs
3
5.275 10
4
5.275 10
5
6.085 10
4
4
5.600 10
t2
2
2
tinf
Таким образом, проанализировав представленные выше дисперсионные картины, можно установить, что для схем высокого порядка аппроксимации по пространству,
основной вклад в численную анизотропию вносит именно временная составляющая дисперсии!
Приступим теперь к анализу поведения этих же численных алгоритмов в
анизотропном случае.
78
6
5.45
2.6. АНИЗОТРОПНЫЙ СЛУЧАЙ
2.6.1 Слабая линейная анизотропия. Параметры Томсена
5.46
В случае произвольной анизотропной среды матрица упругих модулей имеет
совершенно произвольную структуру и, вообще говоря, полностью заполнена. Но, есть
большое количество сред, у которых наблюдается, так называемая слабая линейная анизотропия. Упругие свойства таких сред, могут быть полностью описаны с помощью пяти
параметров:
С66
C11 C12 C13
C12 C11 C13
C
C13 C33
13
0
0
0
0
0
0
0
0
0
0
0
0
C44
0
0
0
0
0
0
C44
0
0
0
0
где
0
0
C66
C11 V p2 1 2 , C33 V p2 , C44 Vs2
C13
V
2
p
Vs2 2 V p2 V p2 Vs2 Vs2
2
C12 C11 2C44 1 2 , C66
C11 C12
2
Параметры , , называются параметрами Томсена среды.
Всюду в дальнейшем, будут рассматриваться среды именно с таким типом
анизотропии.
Хотелось бы понять, насколько отличаются дисперсионные свойства численных алгоритмов на Лебедевских сетках, от дисперсионных свойств схем кода Navier для
анизотропного случая. Для этого, я произвел набор статистики по поведению вышеуказанных алгоритмов в образцах различных сред.
5.47
2.6.2 О параметрах расчетов:
С данными об упругих свойствах сред, которыми я пользовался при работе,
можно ознакомиться в Таблице 1. ( Данная таблица, почерпана мною из [6]).
Во всех расчетах, результаты которых приведены ниже, фиксируется H = 10
и число Куранта 0.8 ( Leb ) .
Кроме того, всюду в дальнейшем, под максимумом численной анизотропии
max i
i 1,3
E1 max min Vs ,
,
по всем направлениям понимается: 2
max Vs ,
E max
,
3
E max Vp ,
,
79
Номер образца на всех нижеследующих графиках, совпадает с его номером в
Таблице 1.
Таблица1. Упругие параметры различных типов сред.
№
Образца
1
Название
Образца
Taylor
sandstone
2
Vp
Vs
3
368
Mesaverde(4903)
м
с
1
829
4
529
м
с
0.1
-
0.2
10
2
703
0.035
0.0
34
55
0.2
11
кг
м3
2
500
0.0
46
2
520
mudschale
3
Mesaverde(4912) im-
4
476
2
814
0.0
97
0.0
91
0.0
51
2
500
mature sandstone
4
Mesaverde(4946) im-
4
099
2
346
0.0
77
0.0
10
0.0
66
2
450
mature sandstone
5
Mesaverde(5469.5)
4
972
2
899
0.0
56
0.003
0.0
67
2
630
silty limestone
6
Mesaverde(5481.3)
4
349
2
571
0.0
91
0.1
48
0.1
05
2
460
immature sandstone
7
Mesaverde(5501)
3
928
2
055
0.3
34
0.7
30
0.5
75
2
590
clayshale
8
Mesaverde(5555.5)
4
539
2
706
0.0
60
0.1
43
0.0
45
2
480
immature sandstone
9
Mesaverde(5566.3)
4
449
2
585
0.0
91
0.5
65
0.0
46
2
570
laminated sandstone
10
Mesaverde(5837.5)
4
672
2
833
0.0
23
0.0
02
0.0
13
2
470
immature sandstone
11
Mesaverde(5858.6)
3
794
2
074
0.1
89
0.2
04
0.1
75
2
560
clayshale
12
Me-
5
3
0.0
-
-
2
80
saverde(6423.6)
460
219
00
0.264
0.007
690
calcareous sandstone
13
Mesaverde(6455.1)
4
418
2
587
0.0
53
0.1
58
0.1
33
2
450
immature sandstone
14
Mesaverde(6542.6)
4
405
2
542
0.0
80
0.003
0.0
93
2
510
immature sandstone
15
Mesaverde(6563.7)
5
073
2
998
0.0
10
0.0
12
0.005
2
680
mudshale
16
Mesaverde(7888.4)
4
869
2
911
0.0
33
0.0
40
0.019
2
500
sandstone
17
Mesaverde(7939.5)
4
296
2
471
0.0
81
0.1
29
0.0
48
2
660
mudshale
18
Mesaverde(350)
3
383
2
438
0.0
65
0.0
59
0.0
71
2
350
shale
19
Mesaverde(1582) sand-
3
688
2
774
0.0
81
0.0
57
0.0
00
2
730
stone
20
Mesaverde(1599) shale
21
3
901
Mesaverde(1958) sand-
2
682
4
237
0.1
37
3
018
0.012
0.0
36
0,0
26
0.039
2
640
0.0
30
2
690
stone
22
Mesaverde(1968)
4
846
3
170
0.0
63
0.0
08
0.0
28
2
690
shale
23
Mesaverde(3805) sand-
4
633
3
231
-
-
0.026
0.033
0.0
35
2
710
stone
24
Mesaverde(3511) shale
25
4
359
Mesaverde(3805) sand-
3
048
3
962
0.1
72
2
926
00
0.0
55
0.0
0.1
57
0.089
2
810
0.0
41
2
870
stone
81
26
Mesaverde(3883) shale
27
621
875
28
6
130
0.2
2
4
0.1
0.0
2
0.3
0.1
0.1
2
000
0.1
85
0.2
05
2
920
45
20
35
0.1
00
00
85
890
0.0
78
25
380
721
0.1
82
4
Cotton Valley
2
1
Wills Point
Shale
29
749
Dog Creek
Shale
28
3
2
640
0.1
80
2
640
Shale
30
Pierre
Shale
31
2
074
Shale(5000)
9
3
048
32
Oil Shale
Shale
34
35
37
Siltstone
39
40
tal
768
029
987
877
941
4
846
0.015
0.0
1
4
20
091
1.1
0.096
0.2
73
2
075
0.0
05
2
430
0.0
40
2
600
0.1
05
0.235
160
80
0.030
20
4
481
0.045
2
0.1
-
0.0
2
6
096
0.005
45
856
420
-
2
0.0
-
-
2
140
30
0.220
2
310
05
45
95
370
0.0
0.0
0.1
2
4
Quartz crys-
30
2
0.0
0.0
0.0
1
5
Muscovite
Crystal
41
292
Timber Mtn
Tuff
368
0.1
30
20
2
420
45
10
02
250
80
0.0
0.0
2
3
Ft.Union
40
664
810
00
2
0.4
0.1
0.0
2
3
Lance
Sandstone
38
206
Green River
Shale
432
65
0.050
00
0.1
-
0.2
2
4
Bandera
Sandstone
36
167
90
55
539
0.0
0.2
2
4
Berea
Sandstone
1
4
Green River
0.1
10
490
231
33
86
2
330
2.2
8
2
790
0.159
2
650
(heaxag. approx.)
82
42
Calcite crystal
5
334
3
353
0.3
69
0.5
79
0.1
69
2
710
(heaxag. approx.)
43
Biotite crystal
44
054
Apatite crystal
45
4
341
6
340
Ice I crystal
lucite
4
3
Aluminum-
0.0
1
2
86
2
0.038
0.164
0.9
0.0
3
218
0.0
31
0.09
3
050
79
-
7
6.1
0.5
-
1
350
0.388
97
676
868
1.2
22
389
627
46
1
1
064
1.3
0
1
860
Composite
47
“Sandstone –
shale”
48
654
009
13
654
306
0.0
1
3
0.1
1
35
0.1
340
63
2
340
0.1
56
0.0
00
2
0.1
0.0
00
69
0.0
0.001
34
819
0.001
59
819
306
0.0
1
3
“LSanisotropic
1
3
“Limestoneshale”
50
009
“SSanisotropic shale”
49
3
2
440
0.2
71
2
440
shale”
51
“Anisotropic-shale”
52
745
“Gas sandwater sand”
53
2
508
1
409
“Gypsumweathered
1
03
78
0
1
911
0.1
.0.001
0.0
22
79
5
-
61
45
0.0
18
1.1
0.3
340
0.0
04
0.140
2
2
030
2.7
81
2
350
material”
83
5.48
2.6.3. Результаты работы
5.49
2.6.3.1 Статистика для схем Ot2, O2
84
5.50
2.6.3.2 Статистика для схем Ot2, O4
85
5.51
2.6.3.3 Статистика для схем Ot2, O8
86
5.52
2.6.3.4 Поверхность численной анизотропии для скорости max Vs образца 1
Слева направо, порядок аппроксимации схем по пространству O2, O4, O8.
CХЕМА КОДА NAVIER
87
max ( , ) 1. 54 10
( , )
2
max ( , ) 2. 64 10
3
( , )
88
max ( , ) 9. 43 10
4
( , )
CХЕМА ЛЕБЕДЕВА
89
max ( , ) 1. 54 10
( , )
2
max ( , ) 7. 44 10
4
( , )
90
max ( , ) 9. 44 10
4
( , )
5.53
2.6.4 Сравнение результатов работы для двух схем
Сравнивая статистику по всем рассмотренным порядкам схем, можно заключить
что, на высоких порядках аппроксимации в анизотропном случае, различия между дисперсионными свойствами численных алгоритмов основанных на Лебедевских сетках, и
схемах кода Navier практически исчезают. В частности, из представленных данных видно,
что для схем порядка O8 отличие дисперсии не превосходит величины 103 . Для схем более низкого порядка дисперсия может также совпадать, а может быть и в несколько раз
хуже для кода Navier – в зависимости от среды!
5.54
2.7 ВЫВОДЫ
Написана программа на MATLAB-e, которая позволяет для произвольного типа
анизотропных сред для схем кода Navier и на сетках Лебедева произвольного порядка аппроксимации по пространству вычислять дисперсионные соотношения. Проделаны массовые вычисления для нескольких конкретных типов сред. Получено что:
Для схем высокого порядка пространственной аппроксимации наибольший вклад
в численную анизотропию вносит именно временная составляющая дисперсии.
2. В анизотропном случае, на высоких порядках аппроксимации схем, различия между их дисперсионными свойствами практически исчезают.
1.
91
5.55
Список литература:
1. Virieux J. P-SV wave propagation in heterogeneous media: Velocity – stress finite – difference method // Geophysics, 1986, Volume 51, pp.889 - 901
2. Levander A. Fourth-order finite-difference P-SV seismograms // Geophysics, 1988,
Volume 53, pp.1425 – 1436
3. Lisitsa V., Vishnevskiy D . Lebedev scheme for the numerical simulation of wave propagation in 3D anisotropic elasticity// Geophysical Prospecting, 2010, Volume 58, pp.619 – 635
4. Berns H., Chapman Ch . A comparison of the dispersion relations for anisotropic elastodynamic finite-difference grids// Geophysics, Volume 76, №3 (May-June 2011). pp.WA43 –
WA50
5. В.В. Лисица, Е.В.Лысь Применение схемы Лебедева для моделирования волновых
процессов в анизотропных упругих средах
6. Thomsen L. Weak elastic anisotropy //Geophysics, Volume 51, №10 (October 1986), pp.
1954 - 1966
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ФЕМТОСЕКУНДНОГО ЛАЗЕРНОГО ОСЦИЛЛОГРАФА
студент 831 группы
Юриков Алексей Сергеевич
Введение
Эта работа относится к проблеме измерения временных характеристик лазерных
световых импульсов. Современные лазеры способны работать во многих временных режимах. Они могут покрывать диапазон длительностей излучения вплоть до единиц фемтосекунд. Для прямого временного анализа световых импульсов длительностью 10 –12 секунд и более используется как традиционная техника (фотоприемник и осциллограф), так
и более сложная. Однако эти приборы не обеспечивают временных измерений в фемтосекундном диапазоне длительностей: от 10–15 до 10–12 секунд. Необходимость таких измере92
ний обусловлена широким распространением фемтосекундных лазеров, которые выпускаются десятками лазерных фирм. Фемтосекундные лазеры применяются в научных лабораториях для изучения быстропротекающих процессов, для ускорения заряженных частиц, а также в технике обработки материалов (от керамики и металлов до глазных тканей). Никаких прямых методов регистрации временных характеристик фемтосекундных
световых импульсов на сегодня нет.
Из тех аппаратно-программных комплексов, которые позволяют обрабатывать фемтосекундные импульсы, можно выделить так называемый автокоррелятор Гюзаляна, позволяющий измерять длительность фемтосекундных импульсов. А так же некоторые прочие нелинейно-оптические измерители, среди которых стоит выделить FROG (Frequency
Resolved Optical Gating) и SPIDER (Spectral Phase Interferometry for Direct Electric-field Reconstruction), позволяющие выявить асимметрию импульса и восстанавливать фазу. Однако такие схемы имеют существенные недостатки, о которых будет сказано ниже. Как альтернатива схемам FROG и SPIDER была разработана и реализована схема «оптического
осциллографа» (Масалов А.В. и Чудновский А.В. Патент РФ №2305259 с приоритетом от
23.01.06). Она, являясь модификацией автокоррелятора, регистрирует две корреляционные функции, получаемые в процессе нелинейного воздействия импульса на среду. Одна,
основная, есть распределение, промодулированное интерференционной структурой. Одновременно с распределением схема регистрирует простейшую корреляционную функцию поля, которая несет необходимую информацию о временной форме исследуемого
светового импульса. Обе корреляционные функции известны на ограниченном интервале
времени и плавно обращаются в нуль на краях интервала. Кроме того, к ним добавляется
шум из-за погрешностей регистрационного прибора.
Для решения задачи восстановления временных характеристик фемтосекундного
светового сигнала по регистрируемым с помощью «оптического осциллографа» корреляционным функциям требовалось создание быстрого эффективного алгоритма решения нелинейных интегральных уравнений. Концепция такого алгоритма была предложена Старожиловой Т. К.. Он основан на методе Ньютона-Канторовича с использованием вейвлетразложения. Этот алгоритм является объектом исследования в работе. Актуальность такого исследования обусловлена тем, что на сегодняшний день не существует математических методов, позволяющих восстановить временные характеристики фемтосекундного
излучения за время, сравнимое со временем проведения эксперимента. Программные реализации используемых ранее методов, позволяющих получить требуемые результаты, работали неоправданно долго (несколько часов).
93
Целью работы является создание и исследование свойств алгоритма для восстановления параметров лазерного импульса по корреляционным функциям, а также программная реализация метода. Для успешного практического применения требуется, чтобы алгоритм мог выдавать результаты за время, сравнимое со временем подготовки и проведения
эксперимента (минуты).
Для достижения поставленной цели в работе решаются следующие задачи:
1. Отладка предложенного алгоритма, устранение его недостатков.
2. Создание прототипа программы на основе алгоритма в MATLAB.
3. Проведение тестовых расчетов, а именно изучение точности восстановления исходного сигнала, скорости работы алгоритма и влияние шума в регистрируемых
корреляционных функциях на качество расчета временных характеристик.
1 Литературный обзор
По той причине, что предложенный алгоритм является в определенной степени уникальным, и ранее ничего подобного создано не было, в текущем разделе работы будет
сделан обзор методов и схем, с помощью которых ранее обрабатывались фемтосекундные
импульсы. Также будут рассмотрены класс некорректных обратных задач, к которому относится поставленная проблема, наиболее распространенные методы решения таких задач, и метод вейвлет-разложения, являющийся «краеугольным камнем» в исследуемом
алгоритме.
1.1 Обзор методов и схем регистрации параметров фемтосекундного импульса
Простейшим нелинейно-оптическим измерителем длительности фемтосекундых импульсов является автокоррелятор Гюзаляна [1]. В нем благодаря квадратичному преобразованию светового поля в кристалле для генерации второй оптической гармоники формируется поле суммарной частоты от двух копий измеряемого светового импульса. Ширина
пучка суммарной частоты (по сути второй гармоники) несет информацию о длительности
исходного импульса. Связь регистрируемого поперечного распределения энергии пучка
суммарной частоты с полем исходного импульса дается выражением:
Q0 ( ) A(t / 2) A(t / 2) dt A(t ) A(t ) dt ,
2
2
где поперечная координата x заменена ее временным эквивалентом – временной задержкой:
x/c
. Здесь A(t) – комплексная амплитуда поля светового импульса,
2 sin( / 2)
подлежащая измерению. Произведение A(t-τ/2)A(t-τ/2) отвечает за формирование поля
суммарной частоты в процессе нелинейного преобразования в кристалле второй гармони94
ки, а интеграл от квадрата модуля поля соответствует процессу регистрации энергии результирующего излучения. Видно, что в автокорреляторе Гюзаляна фазовая часть поля не
проявляется в силу особенностей регистрации поля суммарной частоты. Кроме того, регистрируемое распределение является симметричным по координате Q0(-τ) = Q0(τ) независимо от асимметрии импульса. Восстановление временного хода поля A(t) по регистрируемой функции Q0(τ) невозможно. Таким образом, автокоррелятор Гюзаляна пригоден
лишь для оценок длительности светового импульса. Так в предположении гауссовой фор-
t2
мы импульса A(t ) exp( 2 2 ) (длительность огибающей интенсивности составляет T по
T
уровню 1/e) «длительность» распределения Q0(τ) по уровню 1/e составит
2T , что и дает
желаемую оценку.
Для осуществления аккуратных измерений импульсной огибающей поля светового
импульса (как модуля A(t), так и ее фазы) разработаны несколько нелинейно-оптических
схем. Однако ни одна из них не свободна от серьезных недостатков. В числе прочих следует упомянуть два нелинейно-оптических измерителя: FROG и SPIDER. В схеме FROG
[2] автокоррелятор Гюзаляна дополнен спектрографом, что позволило выявить асимметрию импульса и восстанавливать фазу. Однако в этой схеме осталось неопределенным
направление оси времени (импульс с обращенной по времени огибающей дает идентичное
регистрируемое распределение). Кроме того, алгоритм восстановления поля в схеме
FROG оказался громоздким и не имел физической прозрачности. Схема SPIDER [3] была
разработана как альтернатива схеме FROG. В ней не используется автокоррелятор, и она
свободна от недостатков FROG. Однако техническая реализация прибора SPIDER оказалась весьма громоздкой (в состав прибора входит спекторграф), а его настройка и обслуживание требуют особых навыков. Кроме того, не всякий фемтосекундный лазер может
быть проанализирован с помощью прибора SPIDER из-за относительно высоких требований к энергии измеряемых световых импульсов.
Таким образом, следует заметить, что альтернативная схема «оптического осциллографа» по сравнению с представленными методами обладает рядом неоспоримых преимуществ. А именно: схема дает возможность однозначно восстанавливать асимметрию
импульса и направление оси времени, предъявляет невысокие требования к энергии измеряемых импульсов и имеет возможность самокалибровки по среднему периоду интерференционной картины. Однако наиболее привлекательной чертой «оптического осциллографа» является сходство получаемой интерференционной картины с волновой формой
исходного светового импульса.
95
1.2 Обратные задачи и методы их решения
Задачи математической физики, полученные при решении конкретных прикладных
проблем, могут быть классифицированы различным образом: по типу полученных уравнений, стационарные и нестационарные, экстремальные и вариационные и так далее. Нетривиальным же является разделение математических задач на прямые и обратные. Подобное разделение может быть весьма условно, однако зачастую в определенных случаях
оно оказывается удобным. Пусть, например, имеется два множества U и Z с элементами u
и z соответственно. Также предположим, что на множестве Z определен некоторый произвольный оператор A со значениями в U. Если задача состоит в том, чтобы по заданному
элементу из Z вычислить элемент из U u=Az, то говорят о прямой задаче. К ней можно поставить обратную задачу, то есть по элементу u U вычислить элемент z Z такой, что
Az=u. Нетрудно показать условность такой классификации. Рассмотрим, например, операции дифференцирования и нахождения первообразной. Что из них считать прямой, а что
обратной задачей является вопросом договоренности, а не строгого определения. В общем
же случае принято под прямой задачей понимать такую задачу, где искомой величиной
является результат или следствие явления, в то время как причины являются заданными.
В обратной же задаче – наоборот: результат задан, а искомыми являются причины явления.
Также имеет место разделение задач на корректно и некорректно поставленные.
Рассмотрим операторное уравнение Az = u, z Z, u U, где U и Z – некоторые пространства. Задача называется корректно поставленной по Адамару, если
1)
она имеет решение z = z(u) Z для произвольного элемента u U,
2)
это решение z = z(u) единственно при каждом u U,
3)
решение операторного уравнения устойчиво относительно возмущения пра-
вой части уравнения, то есть оператор A-1 определен на всем U и является непрерывным.
Соответственно, если хотя бы один из этих пунктов нарушен, то говорят, что задача поставлена некорректно для пространств U. Особую роль в определении играет последний пункт, говорящий о малом изменении решения при малом изменении правой части уравнения. К этому условию, пожалуй, следует добавить малое изменение решения
при малом изменении также коэффициентов уравнения, граничных и начальных данных.
Следует заметить, что утверждение о корректности задачи не является абсолютным. То
есть, нельзя говорить о полной корректности или некорректности той или иной задачи.
Это связано с тем, что в конкретной постановке пространства U и Z могут быть заданы поразному. И задача может быть корректна при одном выборе этих пространств и некорректна при другом.
96
Теперь рассмотрим методы решения различных некорректно поставленных обратных задач. Наиболее часто применимый метод – регуляризация по Тихонову. Рассмотрим
некорректно поставленную обратную задачу:
Az u ,
(1)
где u U, z Z. Пусть D – замкнутое выпуклое множество априорных ограничений
на решение задачи (D Z, 0 D). U и Z – гильбертовы пространства, A – линейный ограниченный оператор, действующий из Z в U. В реальных исследованиях входные данные, то
есть правая часть уравнения, входят уже с некоторой погрешностью. Пусть вместо точных
данных u, нам известны приближенные значения uδ, | uδ - u| ≤ δ. Таким образом, приходится, так или иначе, искать не точное, а приближенное решение уравнения. Обозначим его
zα. Тогда можно попытаться скомпенсировать неточность задания входных данных, ведением другого линейного оператора Aα, который будет обладать уже лучшими свойствами,
нежели оператор
. В таком случае можно осуществить переход уже к другой, но кор-
ректной задаче Aαzα = uδ.
В [4] Тихонов предлагает ввести сглаживающий функционал Mα(z) = ||Azuδ||2+α||z||2, где α – параметр регуляризации (регуляризатор). Будем минимизировать данный функционал. Таким образом, ставится задача поиска
inf zD M ( z ) ,
(2)
решением которой и будет являться приближенное решение zα исходного уравнения (1). То есть речь идет о нахождении экстремали сглаживающего функционала. Приближенное решение может быть представлено в операторном виде следующим образом: zα
= R(α)uδ.
Если такое решение сходится к точному при стремлении к нулю погрешности задания входных данных, то R(α) называется регуляризирующим оператором. Главный результат, полученный Тихоновым, содержится в следующем утверждении.
Для любых α > 0, uδ U и линейного ограниченного оператора
задача (2) разре-
шима и имеет единственное решение z D , причем z u / [4].
В случае если D = Z, согласно [5] вместо задачи (2) можно решать уравнение Эйлера – уравнение второго рода: A*Azα+αzα = A*uδ. Если же A = A* ≥ 0, можно ограничиться
лишь возмущением оператора A оператором αE: Azα+αzα = uδ. Это так называемый алгоритм упрощенной регуляризации.
Если говорить о выборе параметра регуляризации, то здесь существует несколько
основных способов. Из наиболее популярных на сегодняшний день можно выделить вы97
бор регуляризатора по невязке, обобщенной невязке, квазиоптимальный выбор. Главное,
что параметр регуляризации должен быть согласован с погрешностью входных данных: α
= α(δ). Работоспособность алгоритма зависит от того, как мы зададим параметр регуляризации. То есть с уменьшением погрешности следует уменьшать и значение параметра.
Однако если брать слишком маленький регуляризатор, то будет расти погрешность и
начнет проявляться некорректность задачи. Получается, что имеется некая «золотая середина», при которой погрешность приближенного решения будет минимальна. Кроме того,
оптимальный параметр регуляризации зависит также и от класса априорных ограничений
на точное решение задачи.
Рассмотрим метод выбора регуляризатора по невязке. Определяющим уравнением
здесь является ||Azα - uδ|| = δ. Невязка зависит от параметра регуляризации. Обозначим
φ(α) = ||Azα - uδ||. Тогда поиск оптимального параметра сводится к решению уравнения
φ(α) = δ. Его приближенное решение можно получить различными вычислительными методами.
Зачастую погрешность входных данных неизвестна, тогда применение метода невязки оказывается затруднительным. В таких случаях пользуются иными способами выбора регуляризатора. Например, выбором квазиоптимального значения параметра регуляризации. Он заключается в том, чтобы минимизировать функцию ( )
du
. Такой
d
способ не зависит напрямую от погрешности правой части уравнения (1).
Следует заметить, что выбор регуляризатора так или иначе определяется различными итерационными методами, что значительно увеличивает время работы алгоритмов.
1.3 Метод вейвлет-разложения
В данной работе ключевым элементом решения поставленной обратной задачи является разложение исходного сигнала по вейвлету, то есть так называемое вейвлетпреобразование. Оно получило практическое применение лишь совсем недавно, несмотря
на то, что первый вейвлет был предложен еще в 1909 году. Сам термин был введен позднее в середине 80-х годов Гроссманом и Морле [6]. Вейвлеты используются там, где необходимо не только изучение характерных частот сигнала, но и их локализация в пространстве или времени. В отличие от преобразования Фурье, которое хорошо подходит для
изучения стационарных сигналов, вейвлет-преобразование имеет базисные функции, сосредоточенные на финтином носителе. Таким образом, вейвлеты – отличный инструмент
для анализа нестационарных сигналов. Сравнение вейвлетов с анализом Фурье проведено
в [7].
98
Доказано, что любую функцию можно представить как суперпозицию вейвлетов,
базис которых строится с использованием масштабного преобразования и смещений.
Кроме того, существуют устойчивые численные алгоритмы, которые позволяют вычислить коэффициенты такого разложения. Чтобы разъяснить, что же представляют собой
вейвлеты, рассмотрим на простом примере, приведенном в [8], как строится вейвлетразложение произвольной функции.
Рис. 1.1 Гистограмма и ее вейвлет-разложение [8]
Пусть в эксперименте исследуется некая зависимость f(x) на интервале 0 ≤ x ≤ 1, и
на этом интервале значение функции измерено в 16 точках. Таким образом, полученные
данные могут быть представлены в виде гистограммы, как показано на рис. 1.1. Исследу99
емая функция может быть представлена в виде f ( x)
15
s
k 0
4,k
k
4,k ( x) , где s4,k f ( ) / 4 , а
16
4,k – ступенька с единичной нормой (то есть высотой 4) и шириной 1/16, отличная от нуля только на k-м отрезке. Это условие записывается как
2
4,k
dx 1 при произвольном j,
и интегрирование ведется по интервалам длины x j 1/ 2 j , а функции j,k имеют вид
j ,k 2 j / 2 2 j x k . Получается, что в нашем примере изначально индекс j = 4. Далее делаем усреднение по соседним точкам, как это показано на рис. 1.1. Получаем вдвое меньше интервалов длины 1/8. Полученные средние значения с точностью до нормировочного
множителя задаются коэффициентами:
s j 1,k
1
1
( s j , 2 k s j , 2 k 1 ) , d j 1,k
( s j , 2 k s j , 2 k 1 ) ,
2
2
или, для обратного преобразования:
s j ,2k
1
1
( s j 1,k d j 1,k ) , s j , 2 k 1
( s j 1,k d j 1,k ) .
2
2
Рис. 1.2 Масштабирующая функция φ(x) ≡ φ0,0(x) и «материнский вейвлет» ψ(x) ≡ ψ 0,0(x) Хаара
[8]
Так как при попарном разбиении интервалов, нормированная разность имеет противоположные знаки в соседних интервалах начального уровня, то вводится функция ψ,
имеющая значение
и
соответственно в этих интервалах, а также нормировочная
функция j ,k 2 j / 2 2 j x k . Все это позволяет представить функцию f(x) в следующем
виде:
7
7
k 0
k 0
f ( x) s3,k 3,k ( x) d 3,k 3,k ( x) .
Далее, переходя таким же способом к более широким уровням (j = 2,1,0), получим
следующее представление функции:
1
3
7
k 0
k 0
k 0
f ( x) s0,0 0,0 ( x) d 0,0 0,0 ( x) d1,k 1,k ( x) d 2,k 2,k ( x) d 3,k 3,k ( x) .
(3)
100
Функции φ0,0 и ψ0,0 представлены на рис. 1.2. Функции φj,k и ψj,k – это нормированные, сжатые в 2j раз и смещенные по оси x модификации этих функций. Такие функции
называются масштабирующей и «материнской» соответственно [9], или при изучении
спектров широкополосными и узкополосными фильтрами. В рассмотренном примере в
любом из представлений исходной функции получается 16 коэффициентов. В общем же
случае число коэффициентов sj,k – 2j, а число коэффициентов dj,k – 2 jn – 2j, где jn – соответствует начальному уровню с наименьшими интервалами (в примере jn = 4).
Формула (3) дает представление о среднем значении всего сигнала (s0,0) и его возмущениях во всех рассматриваемых точках расчетной области (dj,k).Таким образом, мы
можем видеть флуктуационную структуру сигнала. Другими словами, широкий спектр
дает нам общее представление о сигнале, а узкий – его детализацию.
Вернемся теперь к функциям φ0,0 и ψ0,0, изображенным на рис. 1.2. Эти функции
представляют собой вейвлет Хаара. Это один из возможных базисов, который был предложен еще в 1909 году венгерским математиком Альфредом Хааром. Помимо него,
наиболее часто используются вейвлеты Добеши, Гаусса, Мейера и другие [10]. Общим для
всех базисных функций вейвлета является то, что они должны иметь компактный носитель и быть ортогональными. При решении той или иной прикладной задачи следует, особое внимание уделять выбору вейвлета. При всей их кажущейся простоте, неудачный выбор может повлечь за собой серьезные последствия, вплоть до невозможности решения
задачи.
2 Методика решения задачи
2.1 Постановка задачи
Итак, была поставлена задача определения временных характеристик фемтосекундного импульса по данным о двух корреляционных функциях, регистрируемых «оптическим осциллографом» Масалова и Чудновского: основной (4) и вспомогательной (5).
Q( ) e iw0 ( A* (t )) 2 A(t ) A(t )dt
(4)
Q0 ( ) A(t ) A(t ) dt
(5)
2
Основная корреляционная функция Q(τ) является наиболее информативной, она
близка к полю импульса. Вспомогательная корреляционная функция Q0(τ) наименее информативна, она не чувствительна к фазовой модуляции светового импульса.
Везде в дальнейшем вместо действительного поля импульса E(t) будет рассматриваться комплексное поле E(t):
101
E(t) = 0,5(E(t) +E*(t)).
Это поле c амплитудой A(t), зависимость которой от времени имеет колоколообразную форму, характеризуется неравномерным высокочастотным заполнением:
E(t) = A(t) e iw0 ,
здесь w0 – центральная частота поля светового импульса. Комплексная амплитуда с
ее модулем и фазой представляет собой нетривиальную часть поля: квадрат модуля амплитуды – это импульсная огибающая I(t) = |A(t)|2; а фаза φ(t) – это фазовая модуляция
светового импульса A(t) = |A(t)| e i (t ) .
Обе характеристики светового импульса – импульсная огибающая I(t) или |A(t)| и фазовая модуляция φ(t) – подлежат измерению в «фемтосекундном осциллографе».
По определению обе корреляционные функции максимальны при τ = 0 и могут быть
приняты равными единице: |Q(0)| = Q0(0) = 1. Этому условию отвечает нормированная
импульсная огибающая
A(t )
4
dt 1. Фазовый ход основной корреляционной функции в
нуле может считаться нулевым:
d
dt ( ) 0 ,
0
Где Q(τ) = |Q(τ)|e–iφ(τ). По существу это означает, что искомое решение A(t) обладает
тем же свойством:
d
dt (t ) 0 .
t 0
Функция A(t) имеет колоколообразную форму и ограничена по ширине. Практика
управления характеристиками световых импульсов фемтосекундных лазеров показывает,
что произведение длительности импульса на ширину спектра составляет не более 3-5 минимально возможной величины. Это означает, что возможные структурные элементы
функции A(t) не являются «резкими», они достаточно «плавные».
2.2 Общая структура модели
Таким образом, задача может быть представлена в виде:
supp A(t) = supp Qi(τ) = (–T/2; T/2),
A (t )
T /2
2
*
A(t ) A(t )dt Q( ) ,
T / 2
T /2
A (t ) A(t ) A (t ) A(t )dt Q ( ) ,
*
*
0
T / 2
A(t )
4
dt 1 – условие нормировки,
102
d
(0) 0 .
dt
Так как поставленная задача требует решения нелинейных интегральных уравнений,
разработанный алгоритм основывается на методе Ньютона-Канторовича. В процессе реализации данного метода необходимо проводить линеаризацию исходных уравнений, в результате которой получаются линейные интегральные уравнения. Их предлагается решать
с использованием метода вейвлет-Галеркина. Для этого искомые функции представляются
в виде разложения по вейвлет базису:
r 2 j 1
A(t ) a jk jk (t ) ,
j 0 k 0
r 2 j 1
(t ) f jk jk (t ) .
j 0 k 0
Подставив их в интегральные уравнения, получим систему линейных алгебраических уравнений относительно коэффициентов разложения, интегральные множители перед которыми имеют вполне определенный вид в зависимости от выбранного вейвлет базиса. Следует заметить, что такая система является переопределенной, что будет показано
при описании алгоритма. Ее решение предлагается искать методом наименьших квадратов.
2.3 Ограничения модели
Явный видимый недостаток предложенного алгоритма – неоднозначность восстановления импульсной огибающей и фазы. Действительно, если A(t) и φ(t) – решение задачи, то A(t) и φ(t) + R – также решение, где R – любое действительное число. Неединственность решения можно продемонстрировать на следующем примере.
Пусть T = 2, а корреляционные функции поля
1 4 | |, | | 1 / 4;
Q( ) Q0 ( )
| | 1 / 4,
0,
(6)
то есть
T /2
A(t ) A (t ) A (t ) A(t ) dt Q( ),
*
*
T / 2
T /2
A(t ) A (t ) A (t ) A(t ) dt Q ( ).
*
*
0
T / 2
(7)
Решением (5), (6) является
2 , | | 1 / 8;
A0 (t )
0, | | 1 / 8.
(8)
103
Это проверяется непосредственной подстановкой (8) в (7) с учетом (6).
Но тогда для любого α, такого, что |α| ≤ 7/8, функция
Aα(t) ≡ A0(t + α)
также является решением (6), (7) (сдвигаем A0(t) так, чтобы носитель не вылез за
границы отрезка интегрирования). Заметим, что дополнительные условия
dw
(0) 0 и |Q(0)| = Q0(0) = 1
dt
выполняются. Кроме того, при 1/8 ≤ |α| ≤ 7/8 функция
Aα,β(t) ≡ Aα(t)eiβ ≡ A0(t+α)eiβ
также является решением (6), (7).
Неединственность решения может существенным образом сказаться на скорости работы алгоритма.
2.4 Численные методы, программные средства
В ходе вычисления временных характеристик фемтосекундного излучения необходимо решать нелинейные интегральные уравнения. Для этой цели в предложенном алгоритме используется метод Ньютона-Канторовича, который широко применяется для решения подобных задач [11]. В процессе линеаризации получается система линейных
уравнений, которая разрешается с использованием вейвлет-разложения. Этот метод идеально подходит для представления нестационарных сигналов. Основные идеи различных
направлений вейвлет-анализа подробно описаны Добеши в [10].
Что касается технических средств, то для создания тестовой программы был выбран
пакет MATLAB, а также задействованы возможности библиотеки WaveLab. Такое решение обусловлено тем, что MATLAB достаточно прост в использовании и удобен для графического представления результатов. Кроме того, MATLAB изначально содержит в себе
модуль решения переопределенных систем линейных алгебраических уравнений методом
наименьших квадратов с декомпозицией матрицы МНК, что значительно упростило разработку тестовой программы. Следует отметить, что обладая такими значительными преимуществами, используемый пакет имеет существенный недостаток. Скорость работы алгоритма значительно ниже, чем если бы для создания программы был использован какойлибо из языков программирования высокого уровня. Тем не менее, этот недостаток, являющийся серьезным препятствием для использования такого пакета в программноаппаратном комплексе, не имеет особого значения при изучении основных свойств алгоритма.
104
3 Алгоритм
В этом разделе приводится подробное описание алгоритма со всеми выкладками.
Это одна из наиболее существенных частей работы, в совокупности с тестовыми расчетами составляющая ее основной результат.
3.1 Математическая формулировка задачи
Будем искать решение в виде
A(t ) (t ) e i (t ) R(t ) i J (t ), (t ) | A(t ) | R 2 (t ) J 2 (t ) .
Введем следующие функционалы:
F [ R(t ), J (t )]( ) Q( )
T /2
A(t ) A (t ) A (t ) A(t ) dt
*
*
T / 2
Q( )
T /2
3
(t ) (t ) exp{i ( (t ) (t ))} dt
T / 2
Q( )
T /2
(R
(t ) J 2 (t ))( R(t ) i J (t ))( R(t ) i J (t )) dt
2
T / 2
Q( )
T /2
(R
2
(t ) J 2 (t ))( R(t ) R(t ) J (t ) J (t ) i {R(t ) J (t ) J (t ) R(t )}) dt
T / 2
и
F0 [ R(t ), J (t )]( ) Q0 ( )
T /2
A(t ) A (t ) A (t ) A(t ) dt
*
*
T / 2
Q0 ( )
T /2
(t ) 2 (t ) dt
2
T / 2
Q0 ( )
T /2
(R
2
(t ) J 2 (t ))( R 2 (t ) J 2 (t )) dt.
T / 2
Функции Q( ) и Q0 ( ) измеряются в эксперименте. После выделения действительной и мнимой части у функционала F получим
T /2
F1 [ R(t ), J (t )]( ) Re Q( )
3
(t ) (t ) cos{ (t ) (t )} dt
T / 2
Re Q( )
T /2
{R
2
(t ) J 2 (t )}{R(t ) R(t ) J (t ) J (t )} dt ,
T / 2
F2 [ R(t ), J (t )]( ) Im Q( )
T /2
3
(t ) (t ) sin{ (t ) (t )}dt
T / 2
Im Q( )
T /2
{R
2
(t ) J 2 (t )}{R(t ) J (t ) J (t ) R(t )} dt.
T / 2
105
Решение задачи R(t ), J (t ) определяется функциональными уравнениями
F0 [ R(t ), J (t )] 0 ,
F[ R(t ), J (t )] 0 ,
или
F1[ R(t ), J (t )] 0 ,
F2 [ R(t ), J (t )] 0 ,
(9)
F0 [ R(t ), J (t )] 0 .
По известным R(t ), J (t ) при необходимости можно вычислить (t ) и (t ) .
К уравнениям (9) следует добавить граничные условия и условия нормировки. Поскольку при восстановлении поля импульса нормировка импульса несущественна, равно
как несущественно постоянное слагаемое в фазе, то можно положить
(0) 0 ,
(10)
эквивалентное
J (0) 0 .
(11)
Для фазы в нуле должно также выполняться условие
d
dt
0,
(12)
t 0
эквивалентное с учетом (10)
dJ
dt
(0)
t 0
d
dt
sin (0) (0) cos (0)
t 0
d
dt
t 0
d
dt
0 (0) 1 0 0 .
(13)
t 0
Граничные условия на измеряемые функции
Q(T / 2) 0, Q0 (T / 2) 0.
(13)
Условие нормировки
T /2
4
(t ) dt 1 ,
(14)
T / 2
эквивалентное
T /2
{R
2
(t ) J 2 (t )}2 dt 1 .
(15)
T / 2
106
3.2 Метод Ньютона-Канторовича для решения нелинейных интегральных
уравнений
Для решения нелинейных интегральных уравнений (9) применим итерационный меn
n
тод Ньютона-Канторовича. Пусть известно R (t ), J (t ) – приближение к решению (9)
после n итераций метода. Запишем следующее приближение в виде.
R n1 (t ) R n (t ) R(t ) ,
J n1 (t ) J n (t ) J (t ) ,
(16)
где – итерационный параметр (может меняться от итерации к итерации, в простейшем случае равен единице). Поправки R(t ) и J (t ) вычисляются из линейных интегральных уравнений
F1 n
F1 n
[ R (t ), J n (t )]
[ R (t ), J n (t )]
J
F1 [ R n (t ), J n (t )]
R
R
(
t
)
n
n
F2 [ R n (t ), J n (t )] F2 [ R n (t ), J n (t )]
F
[
R
(
t
),
J
(
t
)]
,
2
R
J (t )
J
F [ R n (t ), J n (t )]
F0 n
F0 n
0
[ R (t ), J n (t )]
[ R (t ), J n (t )]
J
R
(17)
где
T /2
F0
F0
R(t )
2 R(t ) ( R 2 (t ) J 2 (t )) R(t )dt
[ R(t ), J (t )]
[ R(t ), J (t )]
J
T / 2
R
J (t )
T /2
2
2
J (t ) ( R 2 (t ) J 2 (t )) J (t )dt
R
(
t
)
(
R
(
t
)
J
(
t
))
R
(
t
)
dt
T / 2
T / 2
2
2
,
J
(
t
)
(
R
(
t
)
J
(
t
))
J
(
t
)
dt
T / 2
T /2
T /2
F1
F1
R(t )
[ R(t ), J (t )]
[ R(t ), J (t )]
J
R
J (t )
T / 2
{R(t ) (3R 2 (t ) J 2 (t )) 2 R(t ) J (t ) J (t )} R(t )dt
T / 2
2
2
R
(
t
)
(
R
(
t
)
J
(
t
))
R
(
t
)
dt
T / 2
T /2
T /2
{J (t ) ( R 2 (t ) 3J 2 (t )) 2 R(t ) J (t ) R(t )} J (t )dt
T / 2
T /2
J (t ) ( R 2 (t ) J 2 (t )) J (t )dt ,
T / 2
107
F2
F2
R(t )
[ R(t ), J (t )]
[ R(t ), J (t )]
J
R
J (t )
T / 2
{J (t ) (3R 2 (t ) J 2 (t )) 2 J (t ) R(t ) R(t )} R(t )dt
T / 2
T /2
J (t ) ( R 2 (t ) J 2 (t )) R(t )dt
T / 2
T /2
{2 J (t ) R(t ) J (t ) R(t ) ( R 2 (t ) 3 J 2 (t ))} J (t )dt
T / 2
T /2
R(t ) ( R 2 (t ) J 2 (t )) J (t )dt .
T / 2
Следовательно, после преобразований
T /2
{R
n
(t ) {3( R n (t )) 2 ( J n (t )) 2 } 2 R n (t ) J n (t ) J n (t )}R(t ) dt
n
(t ) {( R n (t )) 2 3( J n (t )) 2 } 2 R n (t ) J n (t ) R n (t )}J (t ) dt
T / 2
T /2
{J
T / 2
T /2
R
n
(t ) (t )R(t ) dt
T / 2
J
n
(t ) n2 (t )J (t ) dt Re Q( )
T / 2
T /2
T /2
2
n
2
n
(t ){R n (t ) R n (t ) J n (t ) J n (t )} dt ,
T / 2
T /2
{J
n
(t ){3( R n (t )) 2 ( J n (t )) 2 } 2 J n (t ) R n (t ) R n (t )}R(t ) dt
T / 2
T /2
{2 J
n
(t ) R n (t ) J n (t ) {( R n (t )) 2 3( J n (t )) 2 }R n (t )}J (t ) dt
T / 2
T /2
J
n
(t ) (t )R(t ) dt
T / 2
R
n
(t ) (t )J (t ) dt Im Q( )
2
n
T / 2
T /2
(18)
T /2
2
n
2
n
(t ){R n (t ) J n (t ) J n (t ) R n (t )} dt ,
T / 2
T /2
n
2
R (t ) n (t )R(t ) dt
T / 2
T /2
J
n
T /2
n
2
R (t ) n (t )R(t ) dt
T / 2
(t ) n2 (t )J (t ) dt
T / 2
T /2
J
n
(t ) n2 (t )J (t ) dt
T / 2
1
Q0 ( ) n2 (t ) n2 (t ) dt ,
2
T / 2
T /2
где n2 (t ) {R n (t )}2 {J n (t )}2 .
n
Если приближение J (t ) удовлетворяет граничным условиям в нуле (11) и (13), то
поправка J (t ) должна удовлетворять условиям:
108
J (0) 0,
d (J )
dt
0.
(19)
t 0
Линейные интегральные уравнения (18) можно решить методом вейвлет-Галеркина.
Для этого нужно построить на отрезке [T / 2; T / 2] ортонормированный вейвлетбазис { , } , а затем записать искомые функции R(t ), J (t ) в виде разложения по этому
базису. Полученные разложения нужно подставить в (18) и свернуть с базисными функциями { , } . Получится система линейных уравнений для определения коэффициентов
разложения.
3.3 Метод вейвлет-Галеркина для решения системы линейных интегральных
уравнений
Пусть функции Q( ) и Q0 ( ) измерены на интервале (T / 2; T / 2) в точках
k
T
kt , k 0,, N 1, t T / N ,
2
где N 2 p – число точек измерения. Кроме того, из граничных условий (13) мы знаем значения функций Q( ) и Q0 ( ) в точке
N
T
T
T T
N t N
,
2
2
N 2
а именно,
Q( N ) Q0 ( N ) 0.
Таким образом, можно перейти к рассмотрению функций Q( ) и Q0 ( ) на отрезке
[T / 2; T / 2] . С помощью замены переменной t t / t перейдем к рассмотрению отрез-
ка [ N / 2; N / 2] . Точки k перейдут в
k
N
k 2 p 1 k , k 0,, N .
2
Они разбивают отрезок [ N / 2; N / 2] на N 2 p равных частей.
Выберем ортонормированный вейвлет-базис { , } с конечным носителем длины m,
то есть supp (t ) supp (t ) [0; m].
Тогда произвольную функцию y (t ) , заданную своими отсчетами (мы знаем только
y (k ) – значения в целых точках) можно представить в виде разложения по ортонормиро-
ванному базису k0 (t ) (t k ) :
109
y (t )
N
1
2
A [ y]
0
k
N
k m 1
2
0
k
(t ) ,
(20)
считая, что за пределами отрезка [ N / 2; N / 2] y(t ) 0 . Коэффициенты разложения можно вычислить с помощью свертки или фильтрации:
k m
m
k
r 0
0
y(t ) k (t ) dt ar y(k r )
A [ y]
0
k
(21)
с коэффициентами фильтра
1
ar
2
2
e
1
ir
0
m il
e (l ) d .
l 0
Коэффициенты разложения по k0 (t ) не могут быть восстановлены для функции,
заданной своими отсчетами, таким образом, определен наиболее детальный уровень
вейвлет разложения y (t ) .
Рассмотрим следующий более грубый уровень вейвлет разложения. На этом уровне
базисными функциями будут
k1 (t ) k (t ) (t / 2 k ) / 2 0 (t 2k ),
k1 (t ) k (t ) (t / 2 k ) / 2 0 (t 2k ),
при этом
supp 0 supp 0 [0; 2m];
(22)
supp k supp k [2k ; 2m 2k ].
Одноуровневое вейвлет разложение функции y (t ) имеет следующий вид
N
2
y (t )
A [ y]
N
k m
2
0
k
0
k
(t )
N
4
A [ y]
1
k
1
k
(t )
N
k m
4
N
4
D [ y]
1
k
1
k
(t ),
(23)
N
k m
4
Здесь Ak [ y ] и Dk [ y ] – соответственно коэффициенты аппроксимации и детализации
одноуровневого вейвлет разложения функции y ( ) :
Ak1 [ y]
Dk1 [ y ]
k 2m
m
k
j 0
1
0
y(t ) k (t ) dt c j Ak j [ y],
k 2m
m
k
j 0
(24)
1
0
y(t ) k (t ) dt d j Ak j [ y],
110
где c j и d j коэффициенты низкочастотного и высокочастотного фильтров соответственно.
A
j 1
k
Проделав
J
раз
[ y] kj 1 (t ) и,
D
j 1
k
одноуровневое
j
k
j
k
(t )
через
N
N
2 J 1
2 j 1
J
A
k
A [ y]
[ y] kj 1 (t ) получим
N
2 J 1
y (t )
разложение
J
k
[ y ] kJ (t )
j 1
m
D
k
N
[ y ] kj (t ),
j
k
m
2 j 1
Количество уровней разложения возьмем
J max{1, p [log 2 m] 1},
(25)
и тем самым зафиксируем наиболее грубый уровень вейвлет-разложения на котором
длина носителя базисных функций kJ (t ) не больше половины рассматриваемого отрезка.
A [ y] (t ) y (t ) можно рассматривать как приближение
y (t ) , а сумму D [ y] (t ) как разность между двумя последовательными
Каждую сумму
функции
j
k
j
k
( j)
j
k
j
k
( j 1)
( j)
(t ) .
приближениями y (t ) и y
Для решения линейной задачи
L[ y(t )] f (t ),
(26)
где L – линейный оператор, представим приближение к решению в виде
N
N
2 J 1
A
y (l ) (t )
k
N
2 J 1
2 j 1
J
(l ) J
k
[ y ] kJ (t )
j l
m
D
k
N
2 j 1
(l ) j
k
[ y ] kj (t )
m
и запишем невязку
N
N
2 J 1
A
N (l ) (t ) L[ y (l ) (t )] f (t )
k
N
2 J 1
2 j 1
J
(l ) J
k
[ y ] N k (t )
j l
m
D
k
N
2 j 1
(l ) j
k
[ y ] N kj (t ),
m
(27)
N k (t ) L[ kJ (t )], N kj (t ) L[ kj (t )].
Коэффициенты Ak(l ) J [ y], Dk(l ) j [ y] находим из условия ортогональности невязки базисным функциям, входящим в разложение (27):
N
Ar(l ) J [ f ]
2 J 1
N
J
A
N
k
2 J 1
(l ) J
k
m
[ y ] N kr
j l
2 j 1
D
N
k
2 j 1
N
Dr(l ) n [ f ]
2 J 1
N
2 J 1
m
[ y ] N krj ,
N
N
m r J 1 ,
J 1
2
2
N
A
k
(l ) j
k
(l ) J
k
m
J
[ y ] N krn
j l
2 j 1
D
k
N
2 j 1
(l ) j
k
m
[ y ] N krjn , J n l ,
N
N
m r n 1 ,
n 1
2
2
где
111
N kr
L[
J
k
(t )] rJ (t ) dt ,
L[
j
k
(t )] rJ (t ) dt ;
L[
J
k
(t )] rn (t ) dt ;
supp rJ
N krj
supp rJ
N krn
supp rn
L[
N krjn
(t )] rn (t ) dt .
j
k
supp rn
(l )
Тогда за относительную погрешность приближения решения (26) суммой y (t )
можно принять
err
|| y (l 1) (t ) y ( l ) (t ) || 2
|| y ( l ) (t ) || 2
N
2 J 1
J
(A
k
N
2 J 1
Ak( l ) J ) 2
( l 1) J
k
j l 1
m
N
N
2 j 1
2 l 1
(D
k
N
2
J 1
J
(A
k
N
2 J 1
2
)2
(l ) J
k
j l 1
m
N
2 j 1
N
( l 1) j
k
m
k
N
2 j 1
N
2 l 1
(l ) j
k
2
m
k
)2
.
l 1
(D
)2
(l )l
k
m
N
j 1
(D
k
(D
Dk(l ) j ) 2
N
2 l 1
(l )l
k
)2
m
Если эта величина меньше заданного наперед , то в дальнейшем уточнении y (t )
смысла нет. Процесс последовательного приближения так же прекращается при достижении наиболее детального уровня, то есть когда l 1 .
Возьмем l 1 и запишем искомые функции R(t ) и J (t ) в виде разложения по
вейвлет-базису:
R(t )
N
4
A [R]
1
k
1
k
J (t )
D [R]
(t )
N
k m
4
N
4
N
4
1
k
1
k
(t ),
N
k m
4
N
4
D [J ]
Ak1 [J ] k1 (t )
N
k m
4
(28)
1
k
1
k
(t ),
N
k m
4
тогда искомыми величинами будут коэффициенты Ak1 [R], Dk1 [R], Ak1 [J ], Dk1 [J ].
n
n
n
n
n
n
Вейвлет разложение для функций R (t ), J (t ), ( R (t )) , ( J (t )) , R (t ) J (t ) , известных
на n + 1-й итерации метода Канторовича-Ньютона, имеет вид:
R n (t )
N
4
A [ R]
N
k m
4
1
k
1
k
(t )
N
4
D [ R]
1
k
1
k
(t ),
N
k m
4
112
J n (t )
N
4
A [J ]
1
k
1
k
1
k
1
k
1
k
N
4
N
4
N
4
A [J ]
1
k
1
k
D [J ]
(t )
1
k
N
k m
4
N
k m
4
N
4
N
4
A [ RJ ]
1
k
1
k
N
4
A [ R
R n (t ) n2 (t )
k
1
k
k
1
k
2
(t ),
1
k
N
4
D [ R
] k1 (t )
k
A [ J
1
k
1
k
(t ),
N
k m
4
N
m
4
N
4
J n (t ) n2 (t )
2
(t ),
D [ RJ ]
(t )
N
k m
4
1
k
1
k
N
k m
4
R n (t ) J n (t )
(t ),
D [R ]
(t )
N
k m
4
( J n (t ))
1
k
N
k m
4
A [R ]
( R n (t ))
D [J ]
(t )
N
k m
4
N
4
N
4
D [ J
k
2
] k1 (t ),
N
m
4
N
4
] k1 (t )
N
m
4
1
k
1
k
2
(29)
] k1 (t ).
N
m
4
Из свойств вейвлет преобразования имеем
n2 (t )
N
4
A [
k
1
k
2
N
4
D [
] k1 (t )
N
m
4
k
3( R n (t )) 2 ( J n (t )) 2
N
4
2
] k1 (t ),
N
m
4
A [3R
1
k
2
D [3R
A [3J
1
k
2
R 2 ] k1 (t )
N
m
4
1
k
2
J 2 ] k1 (t ),
2
R 2 ] k1 (t ),
(30)
N
m
4
k
N
4
k
N
4
J 2 ] k1 (t )
N
m
4
k
( R n (t )) 2 3( J n (t )) 2
1
k
N
4
D [3J
k
1
k
N
m
4
где коэффициенты вейвлет разложения вычисляются следующим образом:
Ak1 [ 2 ] Ak1 [ R 2 ] Ak1 [ J 2 ], Dk1 [ 2 ] Dk1 [ R 2 ] Dk1 [ J 2 ] ,
Ak1 [3R 2 J 2 ] 3 Ak1 [ R 2 ] Ak1 [ J 2 ], Dk1 [3R 2 J 2 ] 3Dk1 [ R 2 ] Dk1 [ J 2 ]
(31)
Ak1 [ R 2 3J 2 ] Ak1 [ R 2 ] 3 Ak1 [ J 2 ], Dk1 [3R 2 J 2 ] Dk1 [ R 2 ] 3Dk1 [ J 2 ] .
A3j J
2
R2
A Rj 3 A jJ , D 3j J
2
2
2
R2
D Rj 3D jJ .
2
2
1
Умножив скалярно первое интегральное уравнение из (18) на r ( ) , получим:
113
2r 2m
{R n (t ) {3( R n (t )) 2 ( J n (t )) 2 } 2 R n (t ) J n (t ) J n (t )}
( )
d
1
1
1
1
N
{
A
[
R
]
(
t
)
D
[
R
]
(
t
)}
d
t
N
/
2
k
k
k
k
k m
1
r
2r
N
4
N /2
4
2r 2m
r1 ( )
2r
N
4
{J n (t ) {( R n (t )) 2 3( J n (t )) 2 } 2 R n (t ) J n (t ) R n (t )}
d
N { A1 [J ] 1 (t ) D1 [J ] 1 (t )}dt
k
k
k
k
k m N / 2
N /2
4
2r 2m
k
2r
N
4
(t ) n2 (t ){ Ak1 [R] k1 (t ) Dk1 [R] k1 (t )}dt d
n
(t ) n2 (t ){ Ak1 [J ] k1 (t ) Dk1 [J ] k1 (t )}dt d
N /2
J
r1 ( )
n
N
m N / 2
4
k
2r 2m
N /2
R
( )
1
r
2r
N
4
N
m N / 2
4
N /2
Ar1 [Re Q( )] 2 r 2 m 1
r ( ) n2 (t ){R n (t ) R n (t ) J n (t ) J n (t )} dt d ',
t
2r
N / 2
или, после преобразований
N
4
A [R] I
1
k
1R
rk
1
k
1R
rk
[ , ]
N
k m
4
A [J ] I
k
D [R] I
[ , ]
N
k m
4
N
4
N
4
1
k
N
4
D [J ] I
[ , ]
1J
rk
N
m
4
(32)
k
1
k
1J
rk
[ , ] 1r ,
N
m
4
где
2r 2m
I [ y, z ]
1R
rk
y ( )
1
r
N /2
R
n
(t ) {3( R n (t )) 2 ( J n (t )) 2 }z 1k (t )dt d
N / 2
2r
2r 2m
y 1r ( )
y 1r ( )
N /2
R
n
R
n
(t ) n2 (t ) z 1k (t )dt d
N / 2
2r
2r 2m
N /2
(t ) J n (t ) J n (t ) z 1k (t )dt d
N / 2
2r
(33)
2r 2m
I rk1J [ y, z ]
y 1r ( )
2r 2m
2r
2r
1r
y 1r ( )
J
n
(t ) {( R n (t )) 2 3( J n (t )) 2 }z 1k (t )dt d
N / 2
2r
2r 2m
N /2
N /2
R
n
N /2
y ( )
1
r
J
n
(t ) n2 (t ) z 1k (t )dt d
N / 2
(t ) J n (t ) R n (t ) z 1k (t )dt d ,
N / 2
Ar1 [Re Q( )] 1
I r [ ],
t
(34)
114
2r 2m
I r1[ y]
N /2
y 1r ( )
2
n
(t ){R n (t ) R n (t ) J n (t ) J n (t )} dt d '.
N / 2
2r
Умножив скалярно первое интегральное уравнение из (18) на r ( ) , получим:
1
N
4
A [R] I
1
k
1R
rk
k
1
k
1R
rk
[ , ]
N
k m
4
A [J ] I
D [R] I
[ , ]
N
k m
4
N
4
N
4
1
k
N
4
D [J ] I
[ , ]
1J
rk
(35)
N
m
4
k
1
k
1J
rk
[ , ] 1 r ,
N
m
4
где
Dr1 [Re Q( )] 1
I r [ ].
t
1 r
(36)
1
Умножив скалярно второе интегральное уравнение из (18) на r ( ) , получим:
N
4
A [R] I
k
1
k
2R
rk
D [R] I
[ , ]
N
m
4
N
4
k
N
4
A [J ] I
k
1
k
2J
rk
1
k
2R
rk
[ , ]
N
m
4
N
4
(37)
D [J ] I
[ , ]
N
m
4
k
1
k
2J
rk
[ , ] 2r ,
N
m
4
где
2r 2m
I rk2 R [ y, z ]
N /2
y 1r ( )
J
n
(t ){3( R n (t )) 2 ( J n (t )) 2 }z 1k (t )dt d
N / 2
2r
2r 2m
2
J
y ( )
n
(t ) R n (t ) R n (t ) z 1k (t )dt d
N / 2
2r
2r 2m
N /2
1
r
y 1r ( )
N /2
J
n
(t ) n2 (t ) z 1k (t )dt d ,
N / 2
2r
(38)
2r 2m
I [ y, z ] 2
2J
rk
y ( )
1
r
J
2r 2m
y 1r ( )
2r
r
2
(t ) R n (t ) J n (t ) z 1k (t )dt d
N /2
R
n
(t ){( R n (t )) 2 3( J n (t )) 2 }z 1k (t )dt d
n
(t ) n2 (t ) z 1k (t )dt d ,
N / 2
2r
2r 2m
n
N / 2
2r
N /2
y ( )
1
r
N /2
R
N / 2
Ar1 [Im Q( )]
I r2 [ ],
t
(39)
115
2r 2m
I r2 [ y]
y 1r ( )
N /2
2
n
(t ){R n (t ) J n (t ) J n (t ) R n (t )} dt d '.
N / 2
2r
Умножив скалярно второе интегральное уравнение из (18) на r ( ) , получим:
1
N
4
A [R] I
1
k
k
1
k
2R
rk
[ , ]
N
k m
4
A [J ] I
D [R] I
[ , ]
2R
rk
N
k m
4
N
4
N
4
1
k
D [J ] I
[ , ]
2J
rk
(40)
N
4
N
m
4
k
1
k
2J
rk
[ , ] 2r ,
N
m
4
где
Dr1 [Im Q( )]
I r2 [ ].
t
2r
(41)
1
Умножив скалярно третье интегральное уравнение из (18) на r ( ) , получим:
N
4
A [R] I
k
1
k
3R
rk
N
4
D [R] I
[ , ]
N
m
4
k
N
4
A [J ] I
k
1
k
1
k
[ , ]
N
m
4
N
4
N
m
4
(42)
D [J ] I
[ , ]
3J
rk
3R
rk
k
1
k
3J
rk
[ , ] 3r ,
N
m
4
где
2r 2m
I rk3 R [ y, z ]
N /2
{R
y 1r ( )
n
(t ) n2 (t ) z 1k (t ) R n (t ) n2 (t ) z 1k (t )}dt d ,
N / 2
2r
(43)
2r 2m
I [ y, z ]
3J
rk
2r
r
3
N /2
y ( )
1
r
{J
n
(t ) n2 (t ) z 1k (t ) J n (t ) n2 (t ) z 1k (t )}dt d ,
N / 2
1 Ar1[Q0 ( )]
I r3 [ ] ,
2
t
2r 2m
I r3 [ y ]
2r
y 1r ( )
N /2
2
n
(44)
(t ) n2 (t ) dt d '.
N / 2
Умножив скалярно третье интегральное уравнение из (18) на r ( ) , получим:
1
116
N
4
A [R] I
1
k
3R
rk
A [J ] I
k
1
k
D [R] I
[ , ]
N
k m
4
N
4
N
4
1
k
3R
rk
[ , ]
N
k m
4
3J
rk
[ , ]
N
m
4
N
4
(45)
D [J ] I
k
1
k
3J
rk
[ , ] 3 r ,
N
m
4
где
r
3
1 Dr1[Q0 ( )]
I r3 [ ] .
2
t
(46)
Граничные условия в нуле (9) и (10) перейдут в
0
Ak1 [J ] k1 (0)
k m
0
D [J ]
k m
1
k
1
k
(0) 0.
(47)
и
0
Ak1 [J ]
k m
0
d k1
d k1
(0) Dk1 [J ]
(0) 0.
dt
dt
k m
(48)
Таким образом, мы получили СЛАУ - систему линейных алгебраических уравнений
(32), (35), (37), (40), (42), (45), (47), (48), относительно искомых коэффициентов Ak1 [R],
Dk1 [R], Ak1 [J ], Dk1 [J ]. Заметим, что система является переопределенной, так как количество
уравнений
2 6 {m 1 N / 2} 8 6m 3N ,
а
количество
неизвестных
2 2 {m 1 N / 2} 4 4m 2 N (примерно в полтора раза меньше количества уравне-
ний). Для решения этой СЛАУ необходимо использовать какой-либо метод решения переопределенных систем линейных алгебраических уравнений, например метод наименьших квадратов. Правая часть и матрица СЛАУ зависят от выбранного вейвлет базиса и
n
n
известных функций R (t ) , J (t ) , и вычисляются по формулам (33), (38), (43). Введем
обозначения
117
rkR [ y, z ]
2r 2m
y 1r ( )
[ y, z ]
J
rk
y ( )
1
r
~rkR [ y, z ]
y 1r ( )
~rkJ [ y, z ]
y 1r ( )
[ y, z ]
R
rk
y ( )
1
r
rkJ [ y, z ]
y 1r ( )
[ y, z ]
R
rk
y ( )
1
r
rkJ [ y, z ]
y 1r ( )
[ y, z ]
R
rk
y ( )
1
r
rkJ [ y, z ]
y 1r ( )
rkR [ y, z ]
y 1r ( )
[ y, z ]
J
rk
2r
{J
(t ) {( J n (t )) 2 3( R n (t )) 2 }z 1k (t )dt d ,
N /2
R
n
(t ) n2 (t ) z 1k (t )dt d ,
n
(t ) n2 (t ) z 1k (t )dt d ,
n
(t ) R n (t ) R n (t ) z 1k (t )dt d ,
n
(t ) R n (t ) J n (t ) z 1k (t )dt d ,
n
(t ) n2 (t ) z 1k (t )dt d ,
n
(t ) n2 (t ) z 1k (t )dt d ,
n
(t ) n2 (t ) z 1k (t )dt d ,
n
(t ) n2 (t ) z 1k (t )dt d .
N /2
J
N /2
J
N /2
J
N /2
R
N /2
J
(49)
N /2
R
N / 2
2r
2r 2m
n
N /2
N / 2
2r
2r 2m
(t ) {( R n (t )) 2 3( J n (t )) 2 }z 1k (t )dt d ,
N / 2
2r
2r 2m
{R
N / 2
2r
2r 2m
n
N /2
N / 2
2r
2r 2m
(t ) {3( J n (t )) 2 ( R n (t )) 2 }z 1k (t )dt d ,
N / 2
2r
2r 2m
{J
N / 2
2r
2r 2m
n
N /2
N / 2
2r
2r 2m
(t ) {3( R n (t )) 2 ( J n (t )) 2 }z 1k (t )dt d ,
N / 2
2r
2r 2m
n
N / 2
2r
2r 2m
{R
N / 2
2r
2r 2m
N /2
y ( )
1
r
N /2
J
N / 2
Коэффициенты I матрицы СЛАУ можно переписать в виде:
I rk1R [ y, z] rkR [ y, z] rkR [ y, z] 2 rkJ [ y, z],
I rk1J [ y, z] rkJ [ y, z] rkJ [ y, z] 2 rkR [ y, z],
I rk2 R [ y, z] ~rkJ [ y, z] rkJ [ y, z ] 2 rkR [ y, z],
(50)
I rk2 J [ y, z] 2 rkJ [ y, z] ~rkR [ y, z] rkR [ y, z ],
I rk3R [ y, z ] rkR [ y, z ] rkR [ y, z ],
I rk3 J [ y, z ] rkJ [ y, z ] rkJ [ y, z ].
Выпишем формулы для вычисления rkR , ~rkR , rkR , rkR , rkR , rkR .
118
N
4
( A [ R] A [3R
rkR [ y, z ]
N
4
( D [ R] A [3R
j ,l
1
l
N
4
1
j
yz
yz
J 2 ]erljk
Dl1 [ R]D1j [3R 2 J 2 ]erljk
),
2
yz
y z
3J 2 ]erljk
Al1[ R]D1j [ R 2 3J 2 ]erljk
)
(51)
1
l
1
j
2
yz
yz
3J 2 ]erljk
Dl1[ R]D1j [ R 2 3J 2 ]erljk
),
N
m
4
N
4
( A [ R] A [ JR ]e
1
l
1
j
y z
rljk
( D [ R] A [ JR ]e
1
l
1
j
N
4
( A [
yz
Dl1 [ R]D1j [ JR ]erljk
),
1
l
2
yz
y z
] A1j [ R]erljk
Al1 [ 2 ]D1j [ R]erljk
)
N
m
4
N
4
(D [
1
l
2
yz
yz
] A1j [ R]erljk
Dl1 [ 2 ]D1j [ R]erljk
),
N
m
4
N
4
( A [
rkR [ y, z ]
j ,l
N
4
1
l
2
yz
y z
] A1j [ R]g rljk
Al1 [ 2 ]D1j [ R]g rljk
)
N
m
4
(D [
j ,l
y z
rljk
N
m
4
j ,l
j ,l
y z
Al1 [ R]D1j [ JR ]erljk
)
N
m
4
N
4
rkR [ y, z ]
1
l
( D [ R] A [ R
j ,l
yz
y z
J 2 ]erljk
Al1 [ R]D1j [3R 2 J 2 ]erljk
)
N
m
4
j ,l
2
( A [ R] A [ R
rkR [ y, z ]
1
j
N
4
j ,l
j ,l
2
N
m
4
~rkR [ y, z ]
1
j
N
m
4
j ,l
1
l
1
l
2
yz
yz
] A1j [ R]g rljk
Dl1 [ 2 ]D1j [ R]g rljk
),
N
m
4
N
4
( A [ R
rkR [ y, z ]
l
1
l
2
yz
yz
]g rlk
Dl1 [ R 2 ]g rlk
).
N
m
4
где коэффициенты зависят только от выбранного вейвлет базиса
2r 2m
yfqz
g rljk
y 1r ( )
2r 2m
2r
f
1
l
(t )q1j (t ) z 1k (t )dt d g 0yfqz
lj rk r ,
N / 2
2r
yfqz
erljk
N /2
y 1r ( )
N /2
f
1
l
(t ) q1j (t ) z 1k (t )dt d e0yfqz
l rjk ,
(52)
N / 2
119
yz
g rlk
2r 2m
N /2
y 1r ( )
f
(t ) z 1k (t )dt d g 0ylkzr .
1
l
N / 2
2r
и вычисляются один раз на предварительном этапе вычислений.
Выпишем также выражения для интегралов, входящих в правую часть СЛАУ.
2r 2m
I [ y]
1
r
( A [
1
l
1
l
(
2
R
rk
[ y, ] Ak1 [ R] rkJ [ y, ] Ak1 [ J ])
2r 2m
1
l
2
1
l
(t ){R n (t ) J n (t ) J n (t ) R n (t )} dt d '
(
R
rk
2
[ y, ] Ak1 [ J ] rkJ [ y, ] Ak1 [ R])
y 1r ( )
A [
1
l
N /2
2
n
(
2
N
m
4
N
m
4
D [
l ,k
N
4
( [ y, ] A [
2
rk
1
k
2
R
rk
1
l
2
1
l
2
y
R] Dk1 [ J ] Dl1[ 2 J ] Dk1 [ R])g rlk
N
m
4
[ y, ] Dk1 [ J ] rkJ [ y, ] Dk1 [ R]).
N
4
A [
l ,k
y
] Dk1 [ 2 ]g rlk
y
R] Dk1 [ J ] Al1[ 2 J ] Dk1 [ R])g rlk
N
m
4
(t ) n2 (t ) dt d '
N
4
2
(D [
N
4
N / 2
2r
k
1
l
N
4
y
R] Ak1 [ J ] Dl1[ 2 J ] Ak1 [ R])g rlk
k
I r3 [ y ]
l ,k
( A [
y
R] Ak1 [ J ] Al1[ 2 J ] Ak1 [ R])g rlk
N
m
4
N
4
N
4
l ,k
2r 2m
2
n
N
m
4
N
4
N
m
4
[ y, ] Dk1 [ R] rkJ [ y, ] Dk1 [ J ]).
R
rk
l ,k
(D [
k
y
R] Dk1 [ R] Dl1[ 2 J ] Dk1 [ J ])g rlk
2
N
m
4
N
m
4
N
4
l ,k
(
1
l
N / 2
( A [
l ,k
N /2
y ( )
1
r
2r
N
4
(D [
N
4
y
R] Dk1 [ R] Al1[ 2 J ] Dk1 [ J ])g rlk
2
N
m
4
l ,k
k
I [ y]
1
l
N
4
y
R] Ak1 [ R] Dl1[ 2 J ] Ak1 [ J ])g rlk
N
m
4
2
r
( A [
N
m
4
N
4
k
N
4
y
R] Ak1 [ R] Al1[ 2 J ] Ak1 [ J ])g rlk
2
(D [
(t ){R n (t ) R n (t ) J n (t ) J n (t )} dt d '
l ,k
N
4
l ,k
2
n
N
m
4
l ,k
N / 2
2r
N
4
N /2
y ( )
1
r
1
l
y
] Ak1 [ 2 ]g rlk
N
m
4
y
] Ak1 [ 2 ]g rlk
N
m
4
2
N
4
D [
l ,k
1
l
2
y
] Dk1 [ 2 ]g rlk
N
m
4
] rk [ y, ] Dk1 [ 2 ]).
2
N
m
4
120
Далее остается только вычислить коэффициенты g и e, зависящие от выбора вейвлетбазиса. В приложении А подробно рассмотрено, как это сделать. В качестве вейвлетбазиса предлагается использовать базис Хаара, как наиболее простой.
4 Результаты расчетов
Описанный выше алгоритм был реализован в виде тестовой программы в MATLAB.
Проведена серия расчетов, позволяющая судить о качестве восстановления сигнала. Вопервых, были сделаны тестовые запуски программы для различных входных данных. Вовторых, исследована зависимость времени работы программы и требуемое для достижения заданной точности число итераций. В-третьих, рассмотрено влияние шума на результат работы алгоритма.
Исходный импульс генерируется с помощью программы intg, код которой представлен в приложении Б. Входными параметрами являются линейный, квадратичный и кубический чирпы (b1, b2, b3). Для тестовых расчетов будем использовать следующие параметры: b1 = 0, b2 = –0.1÷1, b3 = –0.1÷1. По сгенерированному импульсу рассчитываются
корреляционные функции, являющиеся входными данными в программе. Также на вход
задаются требуемая точность расчетов ε (10-2), количество точек N, в которых определены
исходные функции (в работе рассматриваются 256 и 1024 точки) и максимальное число
итераций (500). Далее приводятся полученные с помощью расчетной программы результаты и их анализ.
4.1 Результаты расчетов для различных исходных импульсов
Для начала рассмотрим качество вычисляемых данных для различных исходных
сигналов. На рис. 4.1 и рис. 4.2 представлены графики характеристик восстановленного и
исходного импульса. Красным цветом изображено точное решение, синим – численное.
Здесь изображены действительная и мнимая части сигнала, его амплитуда и фаза. Следует
отметить, что содержательными с физической точки зрения являются результаты, полученные для амплитуды и фазы. Исходя из этих соображений, первые два графика на каждом рисунке являются вспомогательными и позволяют дать более полную картину о работе алгоритма. По этой причине они не нормировались, и вполне могут не совпадать с точным решением. Основное внимание следует уделять амплитуде и фазе сигнала.
121
Рис. 4.1 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала, N = 256, ε = 0.01
Рис. 4.2 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала, N = 1024, ε = 0.01
Что касается амплитуды, то тут можно видеть очень качественную картину восстановления сигнала в области, являющейся носителем сигнала. В той же области, где исходная амплитуда мала, наблюдаются некоторые отклонения от точного решения, однако
при расчете конечных характеристик, ими можно пренебрегать или учитывать с меньшим
весом, так как основная информация о световом импульсе в этой области не содержится.
122
По этой же причине, казалось бы, не очень удачное восстановление фазы оказывается
вполне приемлемым. В той части расчетной области, где показания амплитуды существенны, фазовая характеристика также восстанавливается довольно точно.
Таким образом, полученные данные показывают, что алгоритм работает успешно.
Он пригоден для решения поставленной задачи. Причем, в случае N = 1024, амплитуда и
фаза восстанавливаются лучшим образом, однако это влечет за собой увеличение времени
работы программы в 4-10 раз.
4.2 Исследование скорости расчета
Важным показателем адекватности алгоритма поставленной задаче является скорость работы программы, которая зависит от числа итераций, необходимых для достижения заданной точности. Эта зависимость была изучена для различных исходных импульсов, и результаты представлены на рис. 4.3.
Рис. 4.3 Число итераций, требуемых для достижения точности ε = 0.01 для исходных импульсов
с чирпами b1 = 0, b2 = -0.1÷1, b3 = -0.1÷1
Как видно из графика, в абсолютном большинстве случаев для достижения требуемой точности необходимо не более 140 итераций. Из общего ряда выбиваются два полученных результата, представленные на рис. 4.3 на последнем графике. Здесь число итераций достигает максимума. Это означает, что алгоритм завершил работу, так и не достигнув заданной точности. Эти случаи следует рассмотреть отдельно. Интересно будет посмотреть на восстановление сигнала для нескольких исходных импульсов, на которое
уходит большее время (рис. 4.4, рис. 4.5, рис. 4.6) .
123
Рис. 4.4 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала, b1 = 0, b2 = 0.65, b3 = 0.85, N = 256, ε = 0.01, время работы алгоритма – 307 секунд , число итераций 138
Рис. 4.5 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала, b1 = 0, b2 = 0.75, b3 = 0.65, N = 256, ε = 0.01, время работы алгоритма – 238 секунд, число итераций 116
124
Рис. 4.6 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала, b1 = 0, b2 = 0.75, b3 = 0.65, N = 1024, ε = 0.01
Несмотря на то, что действительная и мнимая части сигнала восстанавливаются с
некоторыми неточностями, общий портрет амплитуды и фазы остается вполне приемлемым. Единственное, что настораживает – это скорость работы алгоритма для N = 1024.
При этом, как можно судить по рис. 4.5 и рис. 4.6, разница между восстановленными характеристиками в случае 256 и 1024 точек несущественна. Следовательно, для ускорения
работы алгоритма можно брать набор из 256 точек, не теряя при этом в качестве восстановления сигнала.
Теперь исследуем случаи, когда число итераций достигает максимума. Как уже говорилось выше, это означает, что требуемая точность не была достигнута. На рис. 4.7 и
рис. 4.8 представлены восстанавливаемые сигналы.
125
Рис. 4.7 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала b1 = 0, b2 = 0.95, b3 = 0.25, N = 256, ε = 0.01, число итераций - 500
Рис. 4.8 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала b1 = 0, b2 = 0.85, b3 = 0.55, N = 256, ε = 0.01, число итераций - 500
Очевидно, что качество такого восстановления характеристик неприемлемо, однако
общий вид амплитуды и фазы на графиках прослеживается. Чтобы понять, почему алгоритм работает именно таким образом, исследуем зависимость невязки от числа итераций
для случая, представленного на рис. 4.8. Она выглядит так, как представлено на рис. 4.9.
Видно, что для рассматриваемого случая требуемая точность ε = 10-2 не достигается. Кро126
ме того, график имеет минимум, после которого с увеличением числа итераций невязка
только растет. Следовательно, может быть два способа решения данной проблемы. Первый способ – каким-то образом отслеживать, когда невязка достигает своего минимального значения, и брать решение на этой итерации как наиболее точное. Второй способ – это
понижение требуемой относительной погрешности. Однако, вопрос о том, как заранее
найти оптимальную точность для расчетов, остается открытым. Проанализируем результаты, которые будут получаться при использовании обоих методов.
Рис. 4.9 Зависимость относительной погрешности от номера итерации для импульса с рис. 4.8
Если отслеживать минимум невязки, то получается картина, представленная на рис.
4.10. Минимум достигается на 355 итерации, при этом качество восстанавливаемого сигнала существенно не изменяется.
127
Рис. 4.10 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала b1 = 0, b2 = 0.85, b3 = 0.55, время работы алгоритма – 834 секунды , число итераций - 355
Если же уменьшить требования к точности, то результаты получаются такими, как
приведено на рис. 4.11. Кроме того, что картина восстановления более благополучная,
время работы алгоритма составило около 45 секунд, что является намного лучшим показателем, чем в предыдущем случае.
Рис. 4.11 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала b1 = 0, b2 =, b3 =, N = 256, ε = 0.03, время работы алгоритма – 45 секунд, число итераций - 87
128
Таким образом, метод уменьшения точности расчетов оказался более удачным.
Единственный его недостаток заключается в том, что сложно предугадать, какая относительная погрешность будет оптимальна для успешного восстановления сигнала.
Подведем краткий итог под описанными в данном разделе работы проблемами. Была
исследована зависимость времени работы программы и количества итераций для различных исходных импульсов. Для N = 256 и при оговоренных выше входных данных качество и скорость восстановления сигнала оказались приемлемыми, за исключением некоторых случаев. Эти случаи были исследованы дополнительно, и были предложены методы
решения возникшей проблемы.
4.3 Влияние шума на результат восстановления сигнала
Естественно, что на показания любого прибора оказывают влияние внешние факторы. Так и корреляционные функции, регистрируемые в «оптическом осциллографе» оказываются зашумлены. Появляется необходимость исследовать, как этот шум может повлиять на вычисление характеристик импульса. Для этого была проведена серия расчетов,
результаты которых представлены ниже.
В расчетной программе к корреляционным функциям добавляется шум, зависящий
от параметра delta. Этот параметр задает максимальный уровень шума в зависимости от
максимума амплитуды корреляционных функций. Исследовано два исходных сигнала для
значений delta: 0,001 и 0,01. Естественный шум прибора может оказаться и большим, однако для того, чтобы оценить его влияние на расчеты, этого вполне достаточно. Результаты исследования представлены в табл. 4.1 и на графиках.
Для каждого исходного импульса проверялось воздействие случайного (sound) и
наихудшего (maxsound) шума. Для тех случаев, когда требуемая точность расчетов не достигалась, проводилось еще одно измерение с большей относительной погрешностью.
ε = 0.01
ε = 0.03
b1 b2 b3 type(delta)
time
iter time
iter
0.0 0.2 0.3 clear(0)
18,8
5
sound(0.001)
22,6
9
maxsound(0.001)
168,8 88
sound(0.01)
1393,0 500
42,1 16
maxsound(0.01)
1077,0 500
0.0 0.7 0.5 clear(0)
11,4
5
sound(0.001)
62,3 24
maxsound(0.001)
983,5 500
45,9 24
sound(0.01)
37,6 17
maxsound(0.01)
1032,0 500
Табл. 4.1 Зависимость времени работы программы и числа выполненных итераций от параметров delta, ε и исходного сигнала
129
Рис. 4.12 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала b1 = 0, b2 = 0.2, b3 = 0.3, без шума, N = 256, ε = 0.01
Рис. 4.13 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала b1 = 0, b2 = 0.2, b3 = 0.3, со случайным шумом, delta = 0.001, N = 256, ε = 0.01
130
Рис. 4.14 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала b1 = 0, b2 = 0.2, b3 = 0.3, с наихудшим шумом, delta = 0.001, N = 256, ε = 0.01
Рис. 4.15 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала b1 = 0, b2 = 0.2, b3 = 0.3, со случайным шумом, delta = 0.01, N = 256, ε = 0.03
131
Рис. 4.16 Действительная, мнимая часть, амплитуда и фаза исходного и восстановленного сигнала b1 = 0, b2 = 0.2, b3 = 0.3, с наихудшим шумом, delta = 0.01, N = 256, ε = 0.03
Из полученных результатов можно сделать вывод, что наличие даже небольшого
шума в регистрируемых функциях значительным образом сказывается на расчете характеристик сигнала. Во-первых, при наихудшем шуме скорость расчета существенно падает,
становится необходимым производить больше итераций, или регулировать требуемую
точность. Тем не менее, качество восстановления при случайном и наихудшем случаях
заметных различий не имеет. Во-вторых, при увеличении параметра delta на порядок также происходит существенное увеличение времени работы программы. Характеристики
сигнала восстанавливаются несколько хуже, однако огибающие амплитуды и фазы четко
прослеживаются. Кроме того, при delta = 0,01 на графиках амплитуды и фазы можно
наблюдать фантомные сигналы, которые при обработке данных следует убирать.
5 Заключение
Проделанные серии тестовых расчетов показали эффективность предложенного алгоритма. Первое, что следует отметить, исследуемый метод в совокупности с возможностями «оптического осциллографа» позволяет восстановить амплитуду и фазу фемтосекундного сигнала с очень хорошей точностью. Ранее этого сделать не удавалось. Кроме
того, характеристики сигнала восстанавливаются за вполне приемлемое время. В среднем
на нахождение решения требуется не более 140 итераций (N = 256, ε = 0.01). Так что предложенный алгоритм вполне можно считать успешным и пригодным для решения поставленной задачи.
132
Кроме очевидных преимуществ, тестовые расчеты выявили некоторые недостатки
алгоритма. Длительное время работы программы в некоторых исключительных случаях
оказалось связано с невозможностью достижения необходимой относительной погрешности. Такие случаи были исследованы отдельно, и были предложены способы решения
возникшей проблемы. С подобными трудностями пришлось столкнуться и при изучении
влияния шума в корреляционных функциях на качество восстановления сигнала. Наилучшим решением на данный момент является снижение требований к точности расчетов.
Однако тут следует искать некую «золотую середину», ведь при чрезмерном увеличении
допустимой погрешности искажаются измеряемые характеристики. Так что вопрос о том,
какой способ считать оптимальным остается открытым.
Что касается влияния шума на восстановление сигнала, то тут наблюдается следующее поведение алгоритма. Даже незначительная зашумленность корреляционных функций
резко портит качество измерения импульсной огибающей и фазы. Общая структура сигнала отслеживается, однако значение погрешности велико. В этом случае будет целесообразно применить некий алгоритм сглаживания рассчитываемых параметров импульса.
Предполагается, что исследуемый алгоритм будет реализован в виде программного
комплекса. Для повышения эффективности планируется его распараллеливание, так что
большинства тех проблем, что возникли со скоростью работы тестовой программы, удастся избежать.
В данной работе был предложен и изучен математический метод решения нелинейных интегральных уравнений, с помощью которого была решена задача восстановления
временных характеристик фемтосекундного светового импульса по регистрируемым в
«оптическом осциллографе» Масалова и Чудновского корреляционным функциям. Алгоритм, реализованный на основе этого метода, является точным и эффективным. В нем для
решения интегральных уравнений были применены методы Ньютона-Канторовича и
вейвлет-Галеркина. Построенная модель не имеет аналогов.
Также в данной работе были приведены результаты тестовых расчетов по предложенной схеме, показавшие эффективность алгоритма, а также его адекватность поставленной задаче; проведен их анализ. Исследован вопрос о скорости работы построенного
алгоритма в пакете MATLAB, изучено влияние зашумленности корреляционных функций
на качество восстановления сигнала. Выявлены недостатки метода, и предложены способы их устранения.
133
Выводы
1.
Применение метода вейвлет-Галеркина для аппроксимации нелинейных ин-
тегральных уравнений и метода Ньютона-Канторовича для решения получившейся системы позволяет добиться хорошего качества восстановления сигнала при значительном
уменьшении времени работы программной реализации алгоритма.
2.
Рассмотренный метод позволяет получить характеристики сигнала даже при
достаточно большом отношении шум/сигнал.
134
Список использованных источников
1. Gyuzalian R., Janszky J., Corradi G. On a possibility of analysing the temporal characteristics of short light pulses // Optics Communications – 1977, v. 23 – pp. 293-298.
2. Kane D. J., Trebino R. Single-shot measurement of the intensity and phase of an arbitrary ultrashot pulse by using frequency-resolved optical gating // Optics Letters –
1993, v. 18 – pp. 823-825.
3. Iaconis C., Walmsley I. A. Spectral phase interferometry for direct electric-field reconstruction of ultrashort optical pulses // Optics Letters – 1998, v. 23 – pp. 792-794.
4. Тихонов А.Н., Гончарский А.В., Степанов В.В., Ягола А.Г. Численные методы решения некорректных задач. – М.: Наука, Гл. ред. физ.-мат. лит., 1990 – 232 с.
5. Самарский А.А., Вабищевич П.Н. Численные методы решения обратных задач математической физики. Изд. 2-е, стереотипное. – М.: Издательство ЛКИ, 2007. – 480 с.
6. Grossmann A., Morlet J. Decomposition of Hardy Functions into Square Integrable
Wavelets of Constant Shape // SIAM J. Math. Anal. – 1984, 15 – pp. 723-736.
7. Астафьева Н.М. Вейвлет-анализ: основы теории и примеры применения // Успехи физических наук – 1996, том 166, №11 – с. 1146-1170.
8. Дремин И.М., Иванов О.В., Нечитайло В.А. Вейвлеты и их использование // Успехи физических наук – 2001, том 171, №5 – с. 466-501.
9. Meyer Y. Wavelets and operators. – Cambridge Studies in Advanced Math., vol. 37,
Cambridge Univ. Press, Cambridge – 1992 – 223 pp.
10. Добеши И. Десять лекций по вейвлетам. – Ижевск: НИЦ «Регулярная и хаотическая динамика», 2001 – 464 с.
11. Канторович Л.В., Акилов Г.П. Функциональный анализ. – 3-е изд., перераб. – М.:
Наука, Гл. ред. физ.-мат. лит., 1984 – 752 с.
135
Приложение А. Предварительное вычисление коэффициентов g и e
Покажем, что большая часть коэффициентов g, e, определенных в (52), равна нулю.
Без ограничения общности рассмотрим
2m
g 0
01 ( )
ljk
0
2m
e0ljk ( )
1
0
0
2m
g 0lk ( )
1
0
0
N /2
1
l
(t ) 1j (t ) k1 (t )dt d ,
(53а)
N / 2
N /2
(t )
1
l
1
j
(t ) k1 (t )dt d ,
(53б)
N / 2
N /2
1
l
(t ) k1 (t )dt d .
(53в)
N / 2
Поскольку носители l (t ) и 0 ( ) должны иметь пересечение ненулевой меры,
то
2l t 2m
t (2(l m); 2(l m)),
2l 2m t 0
но интегрирование по t ведется по отрезку [ N / 2; N / 2] . Следовательно, при
l m N / 4 или l m N / 4 интеграл (53б) равен нулю, т.е.
e0
0, при l
ljk
N
N
m или l m ,
4
4
аналогично,
g rlk
g rijk
0, при k
N
N
m или k m ,
4
4
или, после преобразований
e0
0, при
ljk
N
N
m l m;
4
4
g 0
0, при
ljk
N
N
N
N
m k m; и m j m .
4
4
4
4
g 0
lk 0, при
N
N
m k m.
4
4
(54)
Если пересечение носителей k (t ) и j (t ) под интегралом (53б) - множество меры
0, значит,
ноль, то e0
ljk
e0
0 при 2 j 2m 2k или 2 j 2k 2m ,
ljk
или, после преобразований
e0
0 при k m j k m .
ljk
(55)
Аналогично,
136
g 0
0 при max{ k , N / 4} m j min{k , N / 4} m .
ljk
(56)
Теперь рассмотрим интеграл вида (53а) более подробно.
2m
g 0
01 ( )
ljk
0
N / 2 2 k
1
p
2k N / 2
(t ) s1 (t ) 01 (t )dt d ,
p l k,
s j k.
(57)
В случае, когда j k и выполняется (54), имеем
0 s min{0, N / 4 k} m 1.
(58)
Для того чтобы g 0
принимало отличное от нуля значение, отрезок
ljk
s supp s1 (t ) supp 01 (t ) [2s ; 2m ]
должен пересекаться с отрезком [ N / 2 2k ; N / 2 2k ] на множестве ненулевой
меры, следовательно:
2m N / 2 2k ,
2s N / 2 2k .
Эти неравенства выполняются в силу (54). Кроме того, s должен пересекаться с
носителем 1p (t ) на множестве ненулевой меры, т. е.
2 s 2 p 2m
s m / 2 p m / 2.
2m 2 p
Поскольку 0 2m , получим
s 2m p m.
(59)
Носитель 1p (t ) должен пересекаться с отрезком [ N / 2 2k ; N / 2 2k ] на множестве ненулевой меры, следовательно
2 p 2m N / 2 2k
N / 4 k m p N / 4 k.
2 p N / 2 2k
(60)
Объединяя (59) и (60), получим
2 p 2 m N / 2 2k
max{ s m, N / 4 k} m p min{m, N / 4 k}.
2 p N / 2 2k
(61)
В случае, когда j k и выполняется (54), имеем
max{ N / 4 k , 0} m 1 s 1.
(62)
Для того чтобы g 0
принимало отличное от нуля значение, отрезок
ljk
s supp s1 (t ) supp 01 (t ) [ ; 2s 2m ]
137
должен пересекаться с отрезком [ N / 2 2k ; N / 2 2k ] на множестве ненулевой
меры, следовательно:
N / 2 2k ,
2s 2m N / 2 2k .
Эти неравенства выполняются в силу (54).
Кроме того, s должен пересекаться с носителем 1p (t ) на множестве ненулевой
меры, т. е.
2 p 2m
m / 2 p s m / 2.
2 s 2m 2 p
Поскольку 0 2m , получим
2m p s m.
(63)
Объединяя (63) и (60), получим
2 p 2m N / 2 2 k
max{ m, N / 4 k} m p min{s m, N / 4 k}.
2 p N / 2 2k
(64)
Сложность вычисления интегралов вида g 0 ps0 заключается в том, что подынтегральные функции не имеют явного выражения в случае ортонормированных вейвлет-базисов с
компактным носителем (за исключением базиса Хаара). Следовательно, придется вычислять g 0 ps0 приближенно, с помощью квадратур Гаусса, используя алгоритм построения
значений функций 01 (t ) и 01 (t ) в узлах t k k / 2 n , k 1, , 2 n 2m . Всего придется вычислить и хранить порядка 16m 2 интегралов вида g 0 ps0 .
Теперь рассмотрим интеграл вида (53в) более подробно.
2m
g 0lk ( )
1
0
0
N / 2 2 k
1
p
2k N / 2
(t ) 01 (t )dt d ,
(65)
p lk
В случае, когда p 0 и выполняется (54), имеем
p supp 1p (t ) supp 01 (t ) [2 p; 2m ]
Для того чтобы g 0
lk принимало отличное от нуля значение, отрезок p должен пересекаться с отрезком [ N / 2 2k ; N / 2 2k ] на множестве ненулевой меры, следовательно:
2 p 2m '
0 p min{m, N / 4 k};
2 p N / 2 2k
N / 4 m k N / 4.
2m N / 2 2k
(66)
138
В случае, когда p 2m и выполняется (54), имеем
supp 1p (t ) [2 p; 2 p 2m 2m];
supp (t ) [ 2m; 2m ];
1
0
mes supp 1p (t ) supp 01 (t ) 0
и, следовательно, интеграл g 0
lk равен нулю.
В случае, когда 2m p m и выполняется (54), имеем
p [ ; 2 p 2m]
и, для того чтобы g 0
lk принимало отличное от нуля значение, необходимо
2 p 2m '
max{ N / 4 k , m} m p m;
2 p 2m N / 2 2k
N / 4 k N / 4 m.
N / 2 2k
(67)
В случае, когда m p 0 и выполняется (54), имеем
2p 0
2 p 2m ' p [2 p; 2m ] ,
2m 0
следовательно, получаем условия, аналогичные (66).
2 p 2m '
m 1 p min{0, N / 4 k};
2 p N / 2 2k
N / 4 m k N / 4 m 1.
2m N / 2 2k
(68)
Всего придется вычислить и хранить порядка 8m интегралов вида g 0 p 0 .
Теперь рассмотрим интеграл вида (53б) более подробно.
2m
e0
01 ( )
ljk
0
N / 2 2 l
1
0
N / 2 2 l
(t ) 1p (t ) s1 (t )dt d ,
p k l,
s j l.
(69)
В случае, когда p s и выполняется (54) и (55), имеем
ps supp s1 (t ) supp 1p (t ) [2 p; 2s 2m].
Для того чтобы e0
принимало отличное от нуля значение, отрезок ps должен
ljk
пересекаться с отрезком [ N / 2 2l; N / 2 2l ] на множестве ненулевой меры, следовательно:
2s 2m N / 2 2l ,
2 p N / 2 2l .
Первое неравенство выполняется в силу (54). Из второго получаем
s p N /4l .
139
Кроме
того,
ps
отрезок
должен
пересекаться
с
носителем
supp 01 (t ) [ ; 2m ] на множестве ненулевой меры, следовательно:
2s 2m max{ p, m} m s p min{m, N / 4 l};
2 p 2m
N / 4 m l N / 4 m.
(70)
В случае, когда p s заменой p на s получаем условия, аналогичные (69).
max{ s, m} m p s min{m, N / 4 l};
(71)
N / 4 m l N / 4 m 2.
Всего придется вычислить и хранить порядка 16m 2 интегралов вида e0 ps0 .
Теперь произведем вычисления коэффициентов g 0lk для базиса Хаара. Для него
m 1 , а базисные функции имеют вид:
0 x 2;
1 1,
2 0, x 0, x 2.
01 (t )
0 x 1;
1,
1
(t )
1 x 2;
1,
2
0, x 0, x 2.
supp 01 (t ) supp 01 (t ) [0; 2].
1
0
Тогда при m 1 неравенства (68) несовместимы, из (69) получим, что
p 0, N / 4 k N / 4 ,
(72)
а из (67)
p 1, N / 4 k N / 4 .
(73)
Рассмотрим выражения для g 0lk в случае (72):
2m
2m
m
0
0
n 0
2m
2m
m
0
0
n 0
yz
g 000
01 ( ) y01 (t ) z10 (t )dt d hn r0 (n)
yz
g000
01 ( ) y01 (t ) z10 (t )dt d g n r0 (n)
1 yz
(r0 (0) r0yz (1)),
2
1 yz
(r0 (0) r0yz (1)),
2
где
r ( )
2m
yz
0
y (t ) z (t )dt ,
1
0
1
0
0
r0 ( )
2
1
0
(t ) 01 (t )dt
0
r0 ( )
2
0
1
0
2
,
2
(t ) 01 (t )dt
2
,
140
2
r0 ( ) 01 (t ) 01 (t )dt
0
2
r0 ( ) 01 (t ) 01 (t )dt
0
2
,
2 3
.
2
Вычислим коэффициенты g 0lk . В случае (72), при N / 4 k N / 4
g 0
kk
g
0 kk
3
2 2
1
2 2
; g 0
kk
; g
0 kk
1
2 2
1
2 2
; g 0
kk
; g
0 kk
1
2 2
1
2 2
; g 0
kk
; g
0 kk
1
2 2
3
2 2
(74)
;
.
В случае (73), при N / 4 k N / 4
g 0
k 1k g 0 k 1k
1
; g 0
k 1k g 0 k 1k
2 2
g
0 k 1k g 0 k 1k
1
2 2
; g
0 k 1k g 0 k 1k
1
2 2
1
2 2
(75)
;
.
Вычислим теперь коэффициенты g 0ljk для базиса Хаара.
С учетом m 1 из (56) получим j k s 0 , а из (54) N / 4 k N / 4. Выражение (61) перейдет в
k N / 4,
k N / 4,
N / 4 k N / 4,
p 1;
p 0;
(76)
p 0; 1.
Таким образом, как и при вычислении g 0lk имеют место два случая
s 0, p 0, N / 4 k N / 4
(77)
и
s 0, p 1, N / 4 k N / 4 .
(78)
В случае (78), при s 0, p 1, N / 4 k N / 4 , получим с учетом (75):
2
1
g 0
k 1kk 0 ( )
g 0 k 1kk
2 2 m
0
2
2
2 2 m
1
1
(t ){ 01 (t )}2 dt d
(79)
1
1
( ) (t ){ (t )} dt d
g 0 k 1k ;
4
2
0
2
1
0
1
1
2
g 0 k 1kk g 0 k 1kk ( )
1
1
g 0 k 1k ;
4
2
1
0
1
0
2 2 m
0
2
2
2 2 m
1
g 0
k 1kk g 0 k 1kk 0 ( )
0
2
2
1
1
(t ) 01 (t ) 01 (t )dt d
1
1
(t ){ 01 (t )}2 dt d
1
1
g 0 k 1k ;
4
2
1
1
g 0 k 1k ;
4
2
141
2
1
g 0
k 1kk g 0 k 1kk 0 ( )
2 2 m
1
1
1
1
g 0 k 1k .
4
2
(t ) 01 (t ) 01 (t )dt d
2
0
Аналогично,
g 0 k 1kk
2
( )
2 2 m
1
0
0
2
2
2 2 m
1
g
0 k 1kk 0 ( )
1
1
(t ){ 01 (t )}2 dt d
1
1
g 0 k 1k ;
4
2
1
1
(t ){ 01 (t )}2 dt d
1
1
g 0 k 1k ;
4
2
2
0
2
1
g
0 k 1kk g 0 k 1kk 0 ( )
2 2 m
0
2
2
2 2 m
1
g
0 k 1kk g 0 k 1kk 0 ( )
g 0 k 1kk g 0 k 1kk
2
( )
(t ) 01 (t ) 01 (t )dt d
(t ){ 01 (t )}2 dt d
1
1
(t ) 01 (t ) 01 (t )dt d
2 2 m
1
0
0
1
1
g 0 k 1k ;
4
2
(80)
1
1
g 0 k 1k ;
4
2
1
1
2
0
1
1
2
1
1
g 0 k 1k .
4
2
В случае (77), при s 0, p 0, N / 4 k N / 4 , получим с учетом (74):
2
2m
1
1
1 2
g 0
kkk 0 ( ) 0 (t ){ 0 (t )} dt d
0
0
2
2m
0
0
g 0
01 ( ) 01 (t ){ 01 (t )}2 dt d
kkk
2
2m
0
0
2
2m
0
0
2
2m
0
0
1 3
g 0 kk ;
4
2
1 3
g 0 kk ;
4
2
1
1
1 1
g 0
kkk g 0 kkk 0 ( ) 0 (t ) 0 (t ) 0 (t ) dt d
g 0
01 ( ) 01 (t ){ 01 (t )}2 dt d
kkk g 0 kkk
1
1
g 0 kk ;
4
2
(81)
1 1
g 0 kk ;
4
2
1
1
1 1
g 0
g 0
kkk
kkk 0 ( ) 0 (t ) 0 (t ) 0 (t ) dt d
1 1
g 0 kk .
4
2
Аналогично,
2
2m
g 0 kkk ( ) 01 (t ){ 01 (t )}2 dt d
1
0
0
0
2
2m
0
0
g
01 ( ) 01 (t ){ 01 (t )}2 dt d
0 kkk
2
1 1
g 0 kk ;
4
2
1 1
g 0 kk ;
4
2
2m
1
1
1 1
g
0 kkk g 0 kkk 0 ( ) 0 (t ) 0 (t ) 0 (t ) dt d
0
g 0 kkk g 0 kkk
0
2
2m
( ) 01 (t ){ 01 (t )}2 dt d
1
0
0
0
1 1
g 0 kk ;
4
2
(82)
1
1
g 0 kk ;
4
2
142
2
2m
0
0
1
1
1 1
g
g
0 kkk
0 kkk 0 ( ) 0 (t ) 0 (t ) 0 (t ) dt d
1 3
g 0 kk .
4
2
Далее представлено вычисление коэффициентов e0ljk для базиса Хаара. Неравенства
(71) при m 1 несовместимы. Из (70) при m 1 получаем:
s p 0;
N / 4 l N / 4
(83)
и
s p 1;
N / 4 l N / 4.
(84)
Таким образом, имеем две серии e0ljk :
N / 2 2 l
2
yfqz
0ll 1l 1
e
y ( )
1
0
0
2
yfqz
0lll
e
y ( )
1
0
0
f
1
0
N / 2 2 l
N / 2 2 l
f
1
0
N / 2 2 l
2
(t ) q (t ) z (t )dt d y ( )
1
1
1
1
1
0
0
2
(t ) q (t ) z (t )dt d y ( )
1
0
1
0
1
0
0
min{ N / 2 2l , 0}
1
0
max{ N / 2 2l , }
f
(t ) q11 (t ) z11 (t )dt d .
min{ N / 2 2l , 2 }
1
0
max{ N / 2 2l , 0}
f
(t ) q01 (t ) z10 (t )dt d .
В силу ограничений на l, имеем из (83)
N / 2 2l N / 2 2( N / 4 1) 2 2 ;
N / 2 2l N / 2 2( N / 4) 0;
а из (84)
N / 2 2l N / 2 2( N / 4) 0;
N / 2 2l N / 2 2( N / 4 1) 2 ;
следовательно,
0
2
yfqz
0ll 1l 1
e
y ( ) f 01 (t ) q11 (t ) z11 (t )dt d .
1
0
0
2
yfqz
0lll
e
y ( )
1
0
0
2
f
1
0
(t ) q01 (t ) z10 (t )dt d .
0
Вычислим интегралы в случае (83) с учетом (74)
e0lll e0lll
2
2
( ) 01 (t ) { 01 (t )}2 dt d
1
0
0
0
2
2
0
0
1 3
g 0 kk ;
4
2
e0
e0
01 ( ) 01 (t ) 01 (t ) 01 (t )dt d
lll
lll
e0lll
e0lll
2
2
( ) 01 (t ) { 01 (t )}2 dt d
1
0
0
0
1 1
g 0 kk ;
4
2
1
1
g 0 kk ;
4
2
(85)
143
2
2
0
0
e0
e0
01 ( ) 01 (t ) 01 (t ) 01 (t )dt d
lll
lll
1 1
g 0 kk .
4
2
Аналогично,
e0lll
e0lll
2
2
( ) 01 (t ) { 01 (t )}2 dt d
1
0
0
e0lll
e0lll
0
2
2
( ) 01 (t ) 01 (t ) 01 (t )dt d
1
0
0
e0lll
1 1
g 0 kk ;
4
2
e0lll
0
2
2
( ) 01 (t ) { 01 (t )}2 dt d
1
0
0
0
2
2
0
0
1
1
g 0 kk ;
4
2
(86)
1 1
g 0 kk ;
4
2
e
e
01 ( ) 01 (t ) 01 (t ) 01 (t )dt d
0lll
0lll
1 3
g 0 kk .
4
2
Вычислим интегралы в случае (84) с учетом (75)
0
2
e0ll 1l 1 e0ll 1l 1 ( ) 01 (t ) { 11 (t )}2 dt d
1
0
0
1
1
g 0 k 1k ;
4
2
0
2
e0ll 1l 1 e0ll 1l 1 ( ) 01 (t ) 11 (t ) 11 (t )dt d
1
0
0
0
2
e0ll 1l 1 e0ll 1l 1 ( ) 01 (t ) { 11 (t )}2 dt d
1
0
0
2
0
0
1
1
g 0 k 1k ;
4
2
(87)
1
1
g 0 k 1k ;
4
2
1
1
1 1
e0
ll 1l 1 e0ll 1l 1 0 ( ) 0 (t ) 1 (t ) 1 (t ) dt d
1
1
g 0 k 1k .
4
2
Аналогично,
0
2
e0ll 1l 1 e0ll 1l 1 ( ) 01 (t ) { 11 (t )}2 dt d
1
0
0
1
1
g 0 k 1k ;
4
2
0
2
e0ll 1l 1 e0ll 1l 1 ( ) 01 (t ) 11 (t ) 11 (t )dt d
1
0
0
2
0
0
2
0
0
1
1
1 2
e
0ll 1l 1 e0ll 1l 1 0 ( ) 0 (t ) { 1 (t )} dt d
1
1
g 0 k 1k ;
4
2
(88)
1
1
g 0 k 1k ;
4
2
1
1
1 1
e
0ll 1l 1 e0ll 1l 1 0 ( ) 0 (t ) 1 (t ) 1 (t ) dt d
1
1
g 0 k 1k .
4
2
Ниже приведены свойства базиса Хаара.
Базисные функции
144
0 x 1;
1,
0, x 0, x 1.
( x)
0 x 1;
1,
( x) 1, 1 x 2;
0, x 0, x 1.
supp 01 ( x) supp 01 ( x) [0; 1].
Для любых функций y и z , представленных в виде (23) верно
Ar1 [ y ] Ar1 [ z ] Dr1 [ y ]Dr1 [ z ]
A [ y z]
1
r
2
1
1
Ar [ y ]Dr [ z ] Dr1 [ y ] Ar1 [ z ]
Dr1 [ y z ]
2
;
.
Отсюда следует, что
Ar1 [ R 2 ]
( Ar1 [ R]) 2 ( Dr1 [ R]) 2
2
;
Dr1 [ R 2 ] Ar1 [ R]Dr1 [ R] 2 ;
A [ R]
1
r
2
Dr1 [ 2 R]
Ar1 [ 2 ] Ar1 [ R] Dr1 [ 2 ]Dr1 [ R]
2
Ar1 [ 2 ]Dr1 [ R] Dr1 [ 2 ] Ar1 [ R]
2
;
.
Коэффициенты фильтров в формулах (24)
c0 c1 1 / 2;
для низкочастотного фильтра;
d 0 1/ 2 ; d1 1/ 2 ;
для высокочастотного фильтра.
Коэффициенты фильтра в формуле (21)
0,
r 1;
1 e
1
1
1
i ( r 1) i
( r 1)
ar
d
e
e d
z
dz
r 0;
Res (1 / z ),
2 0 1
2 0
2i | z|1
2i z 0
(1 / z r 1 ); r 1.
Res
z 0
2
ir
2
Вычислим вычеты:
1
2i;
z 0
z
1
d {r 1}1
1 1
d r (1)
lim {r 1}1 z r 1 r 1 lim
(1) 0.
({r 1} 1)! z 0 dz
z r! z 0 dz r
Res z 1 2i lim z
z 0
Res z ( r 1)
z 0
Следовательно, подставив коэффициенты фильтра
145
a0 1;
a r 0, r 0.
в формулу (21), получим Ak0 [ y] y(k ).
146
Приложение Б. Код программы intg
Эта программа генерирует исходный импульс и рассчитывает корреляционные
функции для заданного количества точек.
function [Q,Q0,Mtest,Phitest] = intg(b1,b2,b3, Trange, p)
% Interferometric Autocorrelator
% Generation of complex Q and Q0
% Q = INTG(b1,b2,b3);
%
b1 - linear chirp
%
b2 - quadratic chirp
%
b3 - qubic chirp
% Trange=300; Range of TIME scale, fs
duration=50;
% Pulse duration, fs
N=pow2(p);
% Number of points
t=Trange/N*[-N/2:N/2-1]';
% TIME scale from -T/2 to T/2, column, N
% 1. Test pulse
% 1.1. Gaussian
%Mtest=exp(-2*log(2)/duration^2*t.^2);
% Modulus of amplitude
% 1.2. Asymmetric pulse
Mtest=0.5*(sign(t)+1).*exp(-2*log(2)/duration^2*t.^2);
Mtest=Mtest-0.5*(sign(t)-1).*exp(-2*log(2)/(0.7*duration)^2*t.^2);
%1.3. Double pulse
%Mtest=exp(-2*log(2)/duration^2*(t+0.3*duration).^2);
%Mtest=Mtest+0.2*exp(-2*log(2)/duration^2*(t-0.8*duration).^2);
tnorm=t/duration;
phi=2*pi*i*tnorm.^2 .*(b1/2+tnorm.*(b2/3+b3/4*tnorm));
Atest=Mtest.*exp(phi);
% Complex amplitude
Phitest=angle(Atest);
%plot(t,3*Mtest,t,Phitest,'LineWidth',2)
%grid
%xlabel('TIME, fs')
%title('PULSE AMPLITUDE & PHASE')
%axis([-Trange/2 Trange/2 -3.2 3.2])
%shg
%pause
147
% 2. Complex Q & Q0, column
Q=fft(fftshift(Atest)).*conj(fft(fftshift(Atest.*Mtest.^2)));
Q=fftshift(ifft(Q));
Q0=fft(fftshift(Mtest.^2));
Q0=Q0.*conj(Q0);
Q0=fftshift(ifft(Q0));
mq = max(abs(Q));
Q = Q/mq;
Q0 = Q0/max(abs(Q0));
Mtest = Mtest/(mq^0.25);
148