ИНТЕРВАЛЬНО-ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ РОБАСТНЫХ РЕГУЛЯТОРОВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
реклама

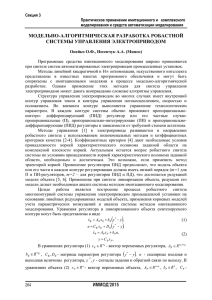
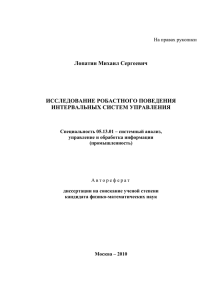
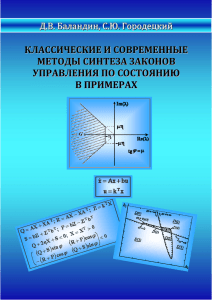
ИНТЕРВАЛЬНО-ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ РОБАСТНЫХ РЕГУЛЯТОРОВ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ Т.А. Езангина, С.А. Гайворонский Национальный исследовательский Томский политехнический университет Аннотация: В статье приведен разработанный алгоритм определения пределов настроек робастного регулятора, гарантирующих расположение его корней левее вертикальной прямой, задающей робастную степень устойчивости. Данный алгоритм построен на основе алгебраических условий, связывающих оценочные показатели устойчивости и колебательности с интервальными коэффициентами характеристического полинома. Рассмотрено применение алгоритма для определения интервалов настроек робастного ПИрегулятора для объекта управления с интервальными коэффициентами передаточной функции. Работоспособность алгоритма проверена построением областей локализации корней интервального полинома при найденных пределах параметров регулятора. Ключевые слова: интервальный характеристический полином, коэффициентные показатели качества, интервально - параметрический синтез, робастный регулятор, робастная степень устойчивости. 1.Введение Важной проблемой современного промышленного производства является разработка и проектирования высококачественных систем автоматического управления в условиях нестабильности и неопределенности их параметров. В реальных системах управления параметры объекта часто заданы неточно, что связано с погрешностями измерений, старением оборудования, возмущениями, влияющими на характеристики объекта. Существует также системы, параметры которых могут изменяться в известных диапазонах. В обоих случаях справедливо говорить о системах управления с интервально-неопределенными параметрами. Примерами являются прокатные станы, бумагоделательные машины, моталки, промышленные роботы и манипуляторы, металлорежущие и обрабатывающие станки с ЧПУ, подъемники с длинными канатами, антенные установки. Решение задачи анализа устойчивости такой системы может быть получено на основе необходимого и достаточного критерия робастной устойчивости – теоремы Харитонова. В соответствии с ней для анализа робастной устойчивости интервального полинома необходимо проверить на устойчивость только четыре полинома Харитонова [1]. В работах [2-5] приведен обзор методов решения задач синтеза систем управления с интервально-неопределенными параметрами. Однако, несмотря на имеющиеся результаты, исследования в области синтеза робастных систем управления с интервально-неопределенными параметрами остаются актуальными. Очевидно, что для проектировщика систем управления важно получить не просто устойчивую систему, а систему с желаемым качеством функционирования. При этом заметим, что система может быть устойчивой, но время затухания ее переходных процессов может быть настолько велико, что практически данная система не может быть использована. Поскольку быстродействие системы определяется ее степенью устойчивости, то представляет интерес задача нахождения пределов параметров робастных регуляторов системы управления, при которых ее степень робастной устойчивости не меньше заданной. При этом корни характеристического полинома лежат левее заданной вертикальной прямой при любых изменениях его коэффициентов. На рис. 1 показано отображение области изменения коэффициентов характеристического полинома на корневую плоскость для случая полинома с робастной степенью устойчивостью, большей . U3 Im U7 U2 V2 a2 U4 U 6 U8 V1 U1 U5 V3 V4 Pm V6 Re 0 V5 0 V7 V8 a1 a3 Рис. 1. Отображение многогранника коэффициентов Целью данной работы является разработка методики определения интервальных параметров робастного регулятора, которые гарантируют системы расположения корней ее характеристического полинома левее вертикальной прямой, задающей робастную степень устойчивости. 2. Алгебарические условия устойчивости и колебательности интервального полинома Пусть система автоматического управления содержит объект B( s) [bc ]s c [bc 1 ]s c 1 ...[b0 ] WОУ s , где a j a j a j , bc bc bc и линейный A( s) [a j ]s j [a j 1 ]s j 1 ...[a0 ] регулятором – W p s, k K (ss, k ) , астатический где k – вектор настраиваемых параметров регулятора. Запишем характеристический полином интервальной системы управления: n P s, k B( s) sK ( s, k ) A( s) ([bc ]s c [bc 1 ]s c 1 ...[b0 ])([km ]s m [km1 ]s m1 ...[k0 ]]) s([a j ]s j [a j 1 ]s j 1 ...[a0 ]) [ pi (k )]s i (1) i 0 На основе коэффициентов pi получены достаточные условия робастной устойчивости и робастной колебательности [6,7]. Эти условия используют показатели устойчивости i и показатели колебательности δz [6,7]. С учетом интервальности коэффициентов pi интервал изменения i определяется выражением [i ] [ p(k )i 1 ][ p(k )i 2 ] , i 1, n - 2. [ p(k )i ][ p(k )i 1 ] Для того, чтобы интервальный полином был устойчив, достаточно выполнения условий [6,7] i p(k )i 1 p(k )i 2 p(k )i p(k )i 1 * , i 1, n - 2, * 0, 465 (2) Из [3] известно, что для расположения корней полинома (1) левее прямой, проходящий через заданную точку ( , j 0), 0 , достаточно выполнения условий ** p(k )i 1 p(k )i 2 * , i 1, n - 2 i ( ) p(k )i p(k )i 1 n i 1 p(k )i 1 p (k )i 2 n i 2 Fl ( ) p(k )l p (k )l 1 (n l 1) 0, l 1, n -1 2 F ( ) p p 2 p 0 0 0 1 2 3 (3) Второй коэффициентный показатель z определяется следующим образом 2 [ p(k ) z ] , z 1, n 1. Согласно [6,7] для того, чтобы расположить корни [ p (k ) z 1 ][ p (k ) z 1 ] интервального характеристического полинома (1) в заданном угловом секторе , достаточно выбрать такие настройки регулятора, при которых выполняются условия p(k ) 2z z d , z 1, n 1, (4) p(k ) z 1 p(k ) z 1 [6,7]: [ z ] где d – допустимый показатель колебательности, определяемый из рис. 2. Рис. 2. Зависимость сектора расположения корней от значения d Таким образом, на основе (3), (4) может быть оценена степень робастной устойчивости интервального характеристического полинома и его робастная колебательность. 3.Алгоритм опреления интервалов коэффициентов полинома Пусть в характеристическом полиноме (1) известны пределы не менее двух старших коэффициентов. Используя условия (3), (4), составим систему неравенств для определения неизвестных пределов регулятора ** p(k )i 1 p(k )i 2 * , i 1, n - 2 i ( ) p(k )i p(k )i 1 n i 1 p(k )i 1 p(k )i 2 n i 2 Fm ( ) p(k )m p(k )m1 (n m 1) 0, m 1, n -1 (5) 2 F0 ( ) p(k )0 p(k )1 2 p(k )2 0 3 p(k )2z z d , z 1, n 1, p(k ) z 1 p(k ) z 1 На основе системы (5) получим выражения для пределов коэффициентов регулятора k az21 az 2 az km km bc 1 az ai 2 ai 1 ai 1 ai n i 1 ai ai 1 n i 2 bc 1 ai 2 4 2 2ai ai 2 ai 1 (ai 1 (n i 2) ai 2 ); ai 1 (ai 1 (n i 2) ai 2 ); km ai 1 ai 2 (ai 1 (n i 2) ai 2 ); ai 2 bc (6) (7) (8) k m 1 k m 1 (ai 1 bc km 1 ) 2 (ai 2 bc )km 1 ai 2 bc 1 az (9) ; ai 2 (ai 1 bc km ) (ai bc km ) ai 1 n i 1 ai 1 ai 3 n i 2 (10) bc 1 ai 2 k m 1 k m 1 (bc km ai 1 ) bc km 1 (ai bc km ) bc 1 (11) ai 1 bc km 1 (ai 1 bc km ) ai 1 n i 1 ai 1 ai 2 n i 2 bc 1 ai 1 ai 2 n i 2 (12) На основе выражений (6) – (12) составлен алгоритм определения пределов параметров регулятора системы управления, при которых гарантируется заданная робастная степень устойчивость. Данный алгоритм содержит следующие этапы: 1. Задание коэффициентов объекта управления, допустимого показателя робастной колебательности, робастной степени устойчивости. 2. Формирование полинома (1). 3. Проверка выполнения условий (3), (4) при известных коэффициентах интервального полинома. 4. Вычисление верхних пределов параметра k m на основе (6), (7) и выбор из них минимального значения. 5. Вычисление нижних пределов параметра k m на основе (8), (9) и выбор из них максимального значения. 6. .Аналогичное вычисление пределов остальных параметров регулятора на основе выражений (10)-(12). 7. Проверка выполнения условия (3)-(4) для найденных значений пределов параметров регулятора. 4.Применение регулятора алгоритма для интервально–параметрического Пусть система автоматического управления имеет объект управления Wоу синтеза робастного b1 s b0 3 2 1 [a3 ]s [a2 ]s [a1 ]s [a0 ] , где [a3 ] [0.0009; 0.001] , [a2 ] [0.48; 0.502] , [a1 ] [5; 6] , [a0 ] [190; 200] , b1 5 , b0 200 и ПИрегулятор W р (s) k1s k0 s . Требуется определить интервалы настроек ПИ-регулятора k1 , k0 , при которых робастная степень устойчивости системы не меньше 11.5 и робастная колебательность ограничена значением d 1.4 . Запишем интервальный характеристический полином данной системы 4 3 2 P ( s ) [ p4 ]s [ p3 ]s [ p2 ( k1 )]s [ p1 ( k1 , k0 )]s [ p0 ( k0 )] , где [ p4 ] [ a3 ] , [ p3 ] [ a2 ] , [ p2 ] [ a1 ] b1 [ k1 ] , [ p1 ] [ a0 ] b0 [ k1 ] b1 [ k0 ] , [ p0 ] b0 [ k0 ]. Следуя разработанному алгоритму, определены пределы настроек ПИ-регулятора k0 [1881.5168.21]; k1 29.1; 31.7 . С помощью правил интервальной арифметики найдем интервалы коэффициентов характеристического полинома. [ p0 (k0 )] [376306.39;1033642.595], [ p1 (k1 , k0 )] [15432.15;3238.992], [ p2 (k1 )] [150.865;164.571]. В рассматриваемой системе будет гарантироваться заданная робастная степень устойчивости при любых значениях параметров ПИ-регулятора из найденных диапазонов, о чем свидетельствует расположение областей локализации корней интервального полинома (рис. 4). Рис. 4. Области локализации корней 5.Заключение В работе на основе робастного расширения коэффициентного метода разработан алгоритм определения пределов параметров регулятора, обеспечивающих робастную степень устойчивости системы управления не меньше заданной. Эффективность алгоритма проверена на примере интервально-параметрического синтеза робастного ПИ - регулятора. Работа выполнена при финансовой поддержке РФФИ (заявка No114-08-31031). 6. Список литературы 1. Б.Т. Поляк, П.С.Щербаков Робастная устойчивость и управление. М.: Наука, 2002.–303с 2. Keel, L.H. Robust stability and performance with fixed-order controllers / Keel L.H. Bhattacharyya S.P. // Automatica 1999 N 35, P. 1717-1724. 3. Wang L. Robust strong stabilizability of interval plants: it suffices to check two t vertices. / Wang L. // System and control letters, 1995, Vol. 26. -P. 133-136. 4. Волков А.Н., Загашвили Ю.В. Метод синтеза систем автоматического управления с максимальной степенью устойчивости при наличии ограничений // Известия РАН. Сер. Теория и системы управления. – 1997. – № 3. – С. 12–19. 5. Татаринов А.В., Цирлин А.М. Задачи математического программирования, содержащие комплексные переменные, и предельная степень устойчивости линейных динамических систем // Известия РАН. Сер. Теория и системы управления. – 1995. – № 1. – С. 28–33 6. S.A. Gayvoronskiy, T.A Ezangina. Bundled Software for the Desing of Interval Dynamic Systems. Applied Mechanics and Materials .Vols. 446 – 447 (2013), pp. 1217-1221. 7. S.A. Gayvoronskiy, T.A Ezangina. Robust control of complex dynamic units with interval parameters. Systems and Computer Science (ICSCS), 2013 2nd International Conference on 26-27 Aug. 2013, Villeneuve d'Ascq, France, PP.201-204.