Методы последовательной оптимизации
реклама

Методы последовательной оптимизации
Недостатки свёртывания нескольких критериев заставляют искать
другие подходы к решению задач многокритериального выбора. В данной
лекции мы будем рассматривать методы последовательной оптимизации.
К методам последовательной оптимизации относят метод
последовательных уступок и как частный случай данного метода – метод
главного критерия, лексикографический критерий и метод равенства
частных критериев.
Метод главного критерия
Существует один, часто применяемый способ свести
многокритериальную задачу к однокритериальной - это выделить один
(главный, основной) критерий F1 и стремиться его обратить в максимум
(минимум), а на остальные F2, F3 , . . Fm частные критерии наложить только
некоторые ограничения, потребовав, чтобы они были не меньше (больше)
каких-то заданных величин. Таким образом, идея метода главного критерия
заключается в том, что частные критерии обычно неравнозначны между
собой (одни из них более важны, чем другие) и это позволяет выделит
главный критерий, а остальные (критерии) рассматривать как
дополнительные, сопутствующие. Например, при оптимизации плана работы
предприятия можно потребовать, чтобы прибыль была максимальна, план по
ассортименту – выполнен или перевыполнен, а себестоимость продукции –
не выше заданной. При таком подходе все показатели, кроме одного –
главного, переводятся в разряд ограничений. Такое различие позволяет
сформулировать задачу многокритериальной оптимизации как задачу
нахождения условного экстремума основного (главного) критерия:
X opt arg{max F1 ( X ) | Fi Ci , i 2, . . ., m}
X D
Метод последовательных уступок
Встречаются случаи, когда пользователь готов на некоторое снижение
величин более важных критериев, чтобы повысить величину менее важных.
В таких ситуациях можно воспользоваться методом уступок. Идею этого
метода можно изложить следующим образом.
Метод последовательных уступок. Согласно этому методу локальные
критерии предварительно ранжируются по важности. Затем ищется
наилучшее решение по наиболее важному критерию. На следующем шаге
ищется решение наилучшее по следующему по важности критерию, причем
допускается потеря в значении первого критерия не более чем на некоторую
обусловленную величину, т.е. делается уступка по первому критерию. На
третьем шаге оптимизируется решение по третьему критерию, при заданных
уступках по первому и второму и т.д., пока не будет рассмотрен последний
по важности критерий.
При решении многокритериальных задач методом последовательных
уступок вначале нужно определить важность частных критериев, т.е.
расположить частные критерии в порядке убывания важности. Таким
образом, главным считается критерий F1 , менее важным F2, . . . , Fm.
Минимизируется первый по важности критерий и определяется его
наименьшее значение F1min . Затем назначается величина допустимого
снижения уступки 10 критерия F1 и ищется наименьшее значение критерия
F2 при условии, что значение F1 должно быть не больше, чем F1min+1. Снова
назначается уступка 20, но уже по второму критерию, которая вместе с
первой используется при нахождении условного минимума F3 и т.д. Наконец,
минимизируется последний по важности критерий Fm при условии, что
значения каждого критерия Fi из m-1 предыдущих должны быть не больше
соответствующей величины Fimin+i .Получаемое в итоге решение считается
оптимальным.
Таким образом, оптимальным считается всякое решение, являющимся
решением последней задачи из следующей последовательности задач
1) Найти F1 min=min F1(X)
XD
2) Найти F2 min.=min F2(X)
(1)
XD
F1 F1min+1
m) Найти Fm min.=min Fm(X)
XD
Fi Fimin+i
i=1,2, . . . ,m-1
Величины уступок выбирают в пределах инженерной точности, т.е. 510% от наименьшего значения критерия.
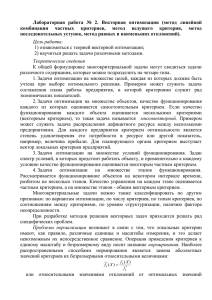
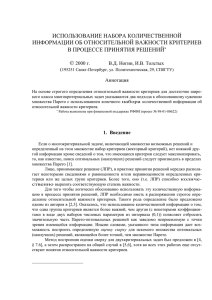
Пример. Пусть в области D={0;4} заданы два критерия F1(x)=(x-1)2+1
F2(x)=(x-2)2+2, которые нужно минимизировать (рис.1). Критерий F1важнее
критерия F2 (F1 предпочтительнее F2).
Рис.1. Графики функций F1 и F2
1. Согласно алгоритму минимизируем первый по важности критерий, и
определяется его наименьшее значение F1min Формулируем задачу
оптимизации
найти min F1(x)= min[x-1)2+1]
при ограничениях
x{0;4}
Минимум для первого критерия достигается в точке x1opt=1 и равен F1(x1opt)=1
2. Затем назначается величина уступки 1=0.1 критерия F1 и ищется
наименьшее значение критерия F2 при условии, что значение F1 должно быть
не больше, чем F1min+1. Таким образом, мы получили следующую задачу
оптимизации
minF2(x)=min[(x-2)2+2]
при ограничениях
x{0;4}
(x-1)2+1 1+0.1
Для решения воспользуемся методом множителей Лагранжа. В результате
получим безусловную задачу оптимизации
Ф(x, λ)= (x-2)2+2+ λ((x-1)2-0.1).
Находим частные производные и приравниваем их к нулю. В результате
получим систему уравнений
2( x 2) ( x 1) 0
2
( x 1) 0.1 0.
Решая эту систему, получим x2opt=1.32.
Согласно алгоритму, решение, полученное на последнем этапе и будет
считается оптимальным, т.е. xopt=1.32.
Решим данную задачу, используя систему MathCad.
f(x):=(x-2)2+2
целевая функция
x:=1
начальное приближение
Given
0≤x≤4
ограничения
(x-1)2≤0.1
p:=Minimize(f,x)
p=1.316.
Ответ: . xopt=1.32.
Зам. Метод последовательных уступок целесообразно применять для
решения тех инженерных задач, в которых все частные критерии
упорядочены по степени важности, причём каждый критерий настолько
более важен, чем последующий, что можно ограничиться учётом только
попарной связи критериев и выбирать величину допустимого снижения
очередного критерия с учётом поведения лишь одного следующего критерия.
Недостатком метода являются трудности с назначением и
согласованием величин уступок, возрастающие с ростом размерности
векторного критерия, а также необходимость формирования неизменного для
всей задачи априорного ранжирования критериев.
Как видим, в методе уступок предполагается, что разница в важности
критериев не слишком велика. Можно предположить, что величина уступок
как-то связана с нашим ощущением этой разницы.
Лексикографический критерий
Противоположным крайним случаем является ситуация, в которой
разница между упорядоченными критериями настолько велика, что
следующий в этом ряду критерий рассматривается только в том случае,
сравниваемые альтернативы неразличимы по старшим критериям. Ни о каких
уступках при этом не может быть и речи. В этой ситуации выбор довольно
часто заканчивается на первом же шаге, а до последнего критерия дело
обычно не доходит (точнее он “изобретается” в том чрезвычайно редком
экзотическом случае, когда принятые ранее критерии не выделили
единственной
альтернативы).
Такой
выбор
получил
название
лексикографического упорядочивания альтернатив, поскольку этот метод
используется при упорядочивании слов в различных словарях
(предпочтительность определяется алфавитным рангом очередной буквы в
данном слове).
Метод равенства частных критериев
Критерии работают на принципе компромисса, основанного на идее
равномерности. Основываясь на идее равномерного компромисса, стараются
найти такие значения переменных X, при которых нормированные значения
всех частных критериев становятся равными между собой, т.е.
fi(X)=K , i=1, 2, . . ., m
(3)
или в другой форме f1(X)= f2(X)= …=fm(X). .
С учётом весовых коэффициентов важности частных критериев выражение
(1) запишется в виде
i fi(X)=K, i=1, 2, . . ., m
(4).
Зам. При большом числе частных критериев из-за сложности взаимосвязей
иногда трудно добиться выполнения соотношений (3). (4).
Пример. Применим метод равенства частных критериев для определения
оптимальных параметров переносного автомата. Будем считать, что частные
критерии одинаковы по важности, тогда
k L N
,
218 65
F1 ( L, N ) F2 ( L, N )
.
N max
Vmax
Выразим F2 через F1. Получим F1
уравнение для массы автомата
N max
66
150 L и подставим в
F1 или N
218
Vmax
66
1.6 L c L 4, где с 0.05
150. Сделаем
218
замену L x. Получим квадратное уравнение 1.6x2+c·x-4=0. Решаем это
уравнение и выбираем, положительный корень x=1.024.Учитывая замену,
получим L=1.05 м. Таким образом, получим следующие значения
оптимальных параметров: Nopt=46, Lopt=1.05м, Vopt=152 м/сек (K=0.697).