Д « Р »
реклама

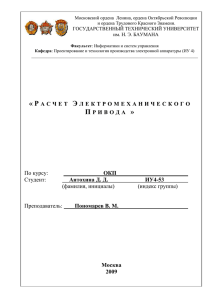
-1- Московский ордена Ленина, ордена Октябрьской Революции и ордена Трудового Красного Знамени. ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ им. Н. Э. БАУМАНА Факультет: Информатики и систем управления Кафедра: Проектирование и технология производства электронной аппаратуры (ИУ 4) ______________________________________________________________________________ ДОМАШНЕЕ «Р ЗАДАНИЕ АСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРИВОДА» По курсу: Студент: ОКП Прилепский Р.А. (фамилия, инициалы) Преподаватель: Пономарев В. М. Москва 2009 ИУ4-53 (индекс группы) -2- Содержание 1. Введение .............................................................................................................................................3 2. Предварительный выбор двигателя привода ЭМП ...................................................4 3. Кинематический расчет ЭМП .................................................................................................5 4. Силовой расчет ЭМП ....................................................................................................................8 а) Проверочный расчет выбранного двигателя по заданной нагрузке ....8 б) Определение модуля зацепления ..............................................................................9 5. Геометрический расчет кинематики ЭМП ................................................................... 11 6. Расчет валов и опор редуктора........................................................................................... 12 7. Точностной расчет разрабатываемой кинематики ................................................ 15 8. Проверочные расчеты проектируемого привода .................................................... 19 9. Список литературы ................................................................................................................... 23 -3- Введение Ниже приводится расчет, в соответствии с принципиальной схемой ЭМП и со спецификацией условий технического задания для варианта 18: Момент нагрузки Мн .....................................................................1 Н·м Частота вращения выходного вала ........................................10 об/мин Угловое ускорение вращения выходного вала Ен .........10 рад/с2 Момент инерции нагрузки Jн ....................................................0.3 кг·м2 Температура эксплуатации ........................................................-20..+40 °С Род тока ................................................................................................переменный Срок службы не менее ...................................................................не менее 3000 часов минимизация Критерий расчета ............................................................................ погрешности Режим работы ....................................................................................кратковременный Метод расчета, процент риска при расчете, точность вероятностный, процент ....................................................................................................................риска - 1% Рабочий угол поворота выходного вала .............................±40° Точность отработки не хуже .....................................................25' Примечание ........................................................................................нет Принципиальная схема ЭМП -4- Предварительный выбор двигателя привода ЭМП Электродвигатель – это электрическая машина, предназначенная для преобразования энергии электромагнитного поля в кинетическую энергию вращения вала. По усвловию ТЗ режим работы привода – кратковременный, следовательно необходимо выбирать двигатель с относительно большим пусковым моментом. По условиям задания получаемый привод должен относится к высокоточным, работающим в кратковременном режиме. Для данного вида привода целесообразно использовать либо шаговые, либо асинхронные двигатели. В виду малого срока службы шаговых двигателей (порядка 1000 часов) их использование следует исключить. Исходя из заданных параметров, выберем серию двигателей ЭМ. Первоначально выберем ряд двигателей ЭМ с частотой вращения 4000 об/мин. Так как частота вращения выходного вала значительно меньше этого значения и составляет 10 об/мин, то получаемый привод относится к редукторам. nдв 4000 об/мин Общее передаточное отношение редуктора определим как: i0 n дв nн 400 Согласно критерию минимизации погрешности, передаточные отношения последней и предпоследней ступеней следует назначить равными и лежащими в пределах 7.5..10, назначим: i 10 Тогда число ступеней редуктора определим как: n lg( i0 ) 3 lg( i ) Рассчитаем КПД редуктора: 0 cm * noдш 0.98 3 * 0.98 2 0.904 Так как ЭМП имеет один выход, то расчетную мощность электродвигателя определяем по формуле: 𝑃𝑝 = 𝑃𝐻 𝜂0 𝜋 ∗ 𝑛𝐻 ∗ 𝑀𝐶 30 𝜋 ∗ 10 ∗ 1 𝑃𝑝 = = 1.158 Вт 3 ∗ 0.904 Примем коэффициент запаса равным 5 (для точных следящих приводов): 𝑃𝐻 = 5 Номинальная мощность двигателя должна быть не менее: 𝑃НОМ = 𝑃𝑝 ∗ Ϛ = 5.792 Вт -5Выберем двигатель ЭМ-15М, со следующими параметрами: U = 115 В, Uу = 80 В, P=8 Вт, nном = 4000 об/мин, Мном = 200·10-3 Н·м, Мпуск = 32·10-3 Н·м, Jр = 0.0021·10-4 кг·м2, Тэм = 30·10-3 с, m = 0.8 кг Кинематический расчет ЭМП Определение общего передаточного отношения По известным значениям скоростей на входе nном и nвых определяем общее передаточное отношение редуктора по формуле: i0 nном (2) nв ых Подставляя полученные в предыдущем пункте значения nном и nвых получаем: i0 4000 400 10 Определение числа ступеней Согласно критерию минимизации погрешности, передаточные отношения последней и предпоследней ступеней следует назначить равными и лежащими в пределах 7.5..10, назначим: i3 i2 10 Тогда число ступеней редуктора определим как: n lg( i0 ) 3 lg( i ) n i 0 ii i 1 i1 4 i0 4 *10 *10 400 -6- Распределение общего передаточного отношения по ступеням Определение чисел зубьев колес редуктора Назначим число зубьев на всех шестернях Z1 Z 3 Z 5 20 (согласно рекомендуемым значениям[1]). Число зубьев ведомых колес для редуктора вычисляется по формуле: Z k Z k 1ik 1,k , где k = 2, 4, 6 - номер колеса. Полученные результаты представлены в табл.1. Таблица 1 Номер ступени Назначенные числа зубьев Передаточное отношение Шестерня Колесо 1 4 20 80 2 10 20 200 3 10 20 200 Так как при расчетах выбор числа зубьев осуществлялся из рекомендованного ряда, то вычисляем фактическое передаточное отношение и погрешность передаточного отношения. Z ik , k 1ф k 1 , где k = 1, 3, 5 Zk Таблица 2. Фактические значения передаточных коэффициентов i12ф i34ф I56ф 4 10 10 Фактическое передаточное отношение редуктора рассчитывается по формуле: 6 i0 ф ik ,k 1ф k 1 Подставляя значения из таблицы 2, находим i0Ф : i0 ф 4 *10 *10 400 Погрешность передаточного отношения находится по формуле: i i0 i0ф 100% i0 Подставляя значения, получаем: i 400 400 100% 400 0% Условие применимости расхождения i0 и i0ф из практических рекомендаций: i 10% . Так как i 0% , следовательно, условие выполняется и выбор числа зубьев колес и шестерен был произведен верно. -7По результатам выполненного расчета изобразим кинематическую схему редуктора в виде эскиза без соблюдения масштаба, но таким образом, чтобы была ясна кинематическая цепь передачи движения между валами (рис.1). Рис.1. Кинематическая схема ЭМП -8- Силовой расчет ЭМП Проверочный расчет выбранного двигателя по заданной нагрузке Так как на данном этапе проектирования известна кинематическая схема ЭМП, то из соотношения приведения моментов [1]: Mi Mj iij ij подш (4), где Mi, Mi – момент нагрузки на i-ом и j-ом валах; iij – передаточное отношение i-го и j-го вала; ηij – КПД передачи, ηij=0.98; ηподш – КПД подшипников, в которых установлен ведущий вал, ηподш =0.98. Поскольку в момент пуска двигателя нужно учесть инерционность двигателя и нагрузки, необходимо, чтобы двигатель обеспечивал нужное угловое ускорение нагрузки. На выходном валу с учётом динамической составляющей действует следующий момент: МΣ= Мн + Jнн=1+0.3*10=4 (Н*м) Для того чтобы проверить правильность выбора двигателя, необходимо привести момент на выходном валу к валу двигателя по формуле (4) для каждого вала, начиная от выходного, и сравнить пусковой момент двигателя с приведённым моментом. Рассчитаем статический момент, приведенный к валу двигателя: M2 M 4 0.416 Н*м i56 * пер * подш 10 * 0.98 * 0.98 M1 M2 0.123 0.043 Н*м i34 * пер * подш 10 * 0.98 * 0.98 M с.пр. M1 0.015 0.011 Н*м i12 * пер * подш 4 * 0.98 * 0.98 Выполним предварительную проверку правильности выбора двигателя: МП ≥ МΣПР=МСТ.ПР+МД.ПР и МНОМ ≥ МСТ.ПР МΣПР=[(1+KМ)*JP + JН/i02]*ε+ МСТ.ПР, где JP – момент инерции ротора двигателя (JP=0.021*10-4 кг*м2), KМ=1 (так как двигатель малоинерционный), ε= εн* i0. МΣПР==0.028 МСТ.ПР=0.011 МНОМ=0.2 Проверка выполняется. Следовательно, двигатель оставляем. -9- Определение модуля зацепления Модуль зацепления определяется из расчета зубьев на прочность (изгибную и контактную). Поскольку в проектировании ЭМП предполагается открытый тип передач, то расчет зубьев на изгиб является проектным. При проверочном расчете по известной геометрии зубьев и заданным нагрузкам определяют действующие контактные напряжения σн и проверяется условие σн≤[σн]. Расчет на изгибную прочность проводят для наиболее нагруженной ступени редуктора, т.е. в нашем случае для ступени Z5-Z6. При этом модуль определяется по менее прочному колесу зубчатой элементарной пары соотношением: 2 K M YF m Km 3 (5), где Z в [ F ] m – модуль прямозубых колес; Кm – коэффициент Кm =1,4 для прямозубых колес K – коэффициент расчетной нагрузки, K=1.1...1.5 (выбирается согласно [1]), выбираем значение K=1.1; M – крутящий момент, действующий на рассчитываемое колесо [Н·м], YF – коэффициент формы зуба, выбирается из таблицы [1], в нашем случае YF=4.15; ψв – коэффициент формы зубчатого венца, для мелкомодульных передач ψв=3...16 (согласно [1]), выбираем ψв=6; [ F ] – допускаемое напряжение при расчете зубьев на изгиб [МПа]; Z – число зубьев рассчитываемого колеса. Если при определении модуля m по формуле (5) дало значение < 0.3 мм, то, исходя из конструктивных соображений, модуль принимают равным 0.3 мм. У шестерни материал берем прочнее. Выбираем материал из рекомендуемых пар: Шестерни: сталь 20Х Термообработка: объемная закалка (должны быть прочнее) = 7.85 г/см3 в = 850 Мпа – предел прочности т = 630 Мпа – предел текучести HRC = 52 Колеса: сталь 50 Термообработка: поверхностная закалка = 7.85 г/см3 в = 800 Мпа – предел прочности т = 590 Мпа – предел текучести HRC = 48 [σF]= * KFC * KFL , где F FR σFR – предел выносливости на изгибе; - 10 КFC – коэффициент, учитывающий цикл нагружения колеса; КFL – коэффициент долговечности; δF – коэффициент запаса прочности (т.к. условие работы кратковременное, то δF=2.2); КFC=1, для нереверсионных передач. 4 * 10 6 КFL= 6 , где Nн NН – число циклов нагружения NН=60*n*c*L n – частота вращения зубчатого колеса, n=10 об/мин, c – число колес, находящихся одновременно в зацеплении с рассчитываемым, с=1, L – срок службы передачи, L=3000 часов. NН=60·10·1·3000=1800000 оборотов КFL= (4000000/1800000)^1/6 = 1.14 И у шестерен, и у колес σFR=550 МПа. FR KFC KFL [σF]= = 285.6 МПа F Для шестерен значения Yf больше, чем для колес, а, следовательно, и отношение Yf /[σf] больше, поэтому расчет веду по шестерне. Подставляя данные в формулу (5) получаем 3 2 ∗ 1.1 ∗ 1 ∗ 4.15 𝑚 = 1.4 ∗ √ = 0.09 20 ∗ 6 ∗ 285.6 Исходя из конструктивных соображений, назначаем модули зацепления на все передачи равными 0.3 мм. Определение допускаемых напряжений для шестерен и колес [σн] =σHR·ZR·ZV·KHL1,2/δH12, где σHR – предел контактной выносливости поверхности зубьев; σHR шестерен = 18·HRC+150 = 18·52+150 = 1086 МПа; σHR колес = 17·HRC+200 = 17·48+200 = 1016 МПа; ZR – коэффициент шероховатости сопряженных поверхностей, ZR=1; ZV – коэффициент, учитывающий окружную скорость колеса, ZV =1; δH12 – коэффициент безопасности, δH12 = 1/2; KHL – коэффициент долговечности KHL = 6 Nно , где Nн NH = 1800000 оборотов NHO = 1,5*108 для закаленных до HRC 45...50 шестерен 6 𝐾𝐻𝐿 = √ 150000000 = 2.09 1800000 - 11 [σн]шестерен = 1086·1·1·2.09/1.2 = 1891.5 МПа [σн]колес = 1016·1·1·3.282/1.2 = 1769.5 МПа Следовательно, допускаемое контактное напряжение [σн] = 1769.5 МПа Допускаемое напряжение изгиба [σF] = 285.6 МПа. Геометрический расчет кинематики ЭМП Геометрические размеры зубчатых колес находятся по справочным таблицам [1]. Делительный диаметр d1=m·Z1/cosβ=m·Z1 т.к. колесо прямозубое, то β=0 Диаметр вершин зубьев da=m·z/cosβ+2·m· (ha+x12)=m· (z+2) т.к. ha=1, x12=0 Диаметр впадин df=m·z/cosβ-2·m· (ha+c-x12)=m(z-2-2·c); m≤0.5, c=0.5; 0.5<m<1, c=0.35 Ширина колес b= ψbm·m, где для шестерен ψbm=4.5, для колес ψbm=4 Делительное межосевое расстояние aω=0.5·m·(Z1+Z2)/cosβ=0.5·m·(Z1+Z2) № колеса d1, мм da, мм df, мм b, мм aω, мм 1 6 6.6 5.1 1.35 2 24 24.6 23.1 1.2 15 3 6 6.6 5.1 1.35 4 60 60.6 59.1 1.2 33 5 6 6.6 5.1 1.35 6 60 60.6 59.1 1.2 33 - 12 - Расчет валов и опор редуктора Расчет валов Для расчёта диаметров вала согласно [1] будем использовать следующую формулу: M кр d3 , где 0.1 [ ] Мкр - момент, действующий на вал [Н·мм]; [σ] – допускаемое напряжение для выбранного материала [МПа]. Значение [σ] зависит от характера нагрузки и определяется соотношением: [ ] 1 , где n σ-1 – предел выносливости материала при симметричном цикле; n – коэффициент запаса, назначаем n=1.5 (по характеру работы привода). В качестве материала для валов выбираем сталь 40Х после улучшения. С характеристиками: σ-1=380 МПа; HB 280. В итоге получаем [σ]=253 МПа. Расчет диаметра всех валов дает: 3й вал: d≥4.12 2й вал: d≥2.83 1й вал: d≥1.92 Из технологических соображений назначаем диаметры валов из стандартного ряда по ГОСТ 12081-72: 1й вал 2й вал 3й вал 3.0 5.0 5.0 Расчет вала на жесткость Исходные данные: Крутящий момент 1000,00 Н*мм Угол в плане 180,00 Число зубьев первого колеса 75 Модуль первого колеса 0,30 Число зубьев второго колеса 20 Модуль второго колеса 0,30 Материал 40Х (улучшенная) Допускаемые напряжения 126,67 МПа - 13 - Силы в зацеплениях: P1 = 40,12 H P2 = 132,16 H R1 = 14,60 H R2 = 48,10 H Проекции сил в зацеплениях на оси координат: FX1 = -40,12 H FX2 = -132,16 H FY1 = 14,60 H FY2 = -48,10 H Реакции в опорах: X1 = 60,44 H Y1 = 1,84 H X2 = 111,84 H Y2 = 31,66 H Диаметры и длины конструктивных ступеней вала (в мм): Длина Диаметр 4,00 2,69 9,00 4,04 15,00 4,22 Расчёт на жёсткость: Прогиб в первом колесе: Максимально допускаемый 0,009000 мм Реальный 0,005387 мм Прогиб во втором колесе: Mаксимально допускаемый 0,009000 мм Реальный 0,003145 мм - 14 - Расчет шарикоподшипников Поскольку в разрабатываемой конструкции присутствует только радиальная нагрузка на валы, то выбираем радиальные шарикоподшипники. Расчет будем вести по динамической грузоподъёмности CP, используя следующую формулу: CP 0.01 P 3 60 n Lh , где P=250 Н, эквивалентная динамическая нагрузка; n= 10 об/мин, частота вращения вала; Lh=3000 ч, долговечность. Получим CP = 204 Н. Исходя из полученных данных, используя справочные таблицы [2], выберем радиальный однорядный шарикоподшипник (ГОСТ 8338-75) со следующими параметрами: Условное обозначение: 1000085 (легкая серия диаметров); - 15 - Точностной расчет разрабатываемой кинематики Должно выполняться условие: 0 S , где -погрешность передачи; 0 S =25’ – заданная погрешность передачи. Погрешность передачи состоит из кинематической погрешности и погрешности мёртвого хода. i 0 Л Назначим для рассчитываемого ЭМП 6-ю степень точности и вид сопряжения — G. Fi0 min 0,62K s ( Fi1 Fi2 ) , где Ks – коэффициент фазовой компенсации, выбирается из таблиц [1]. Fi Fр f f , где Fр – допуск на накопленную погрешность шага зубчатого колеса (шестерни), выбирается из таблиц [1] ], Fi1 , Fi2 - допуск на кинематическую погрешность шестерни и колеса соответственно. ff – допуск на погрешность профиля зуба ff = 7 [1], т. к. m = 0,3 Fi0 max K ( Fi1 ) 2 E2 М 1 ( Fi2 ) 2 E2 М 2 , где E М 1 и E М 2 – приведенные погрешности монтажа шестерни и колеса соответственно E М 1 E М 2 0 Минимальные и максимальные значения кинематических погрешностей элементарных передач: Fi0 max j Fi0 min j i 0 max j 6,88 i 0 min j 6,88 , , где mz2 j mz2 j z2j – число зубьев ведомого колеса m – модуль передачи, мм Значение кинематической погрешности: i0 j i 0 j K , где: К – коэффициент, учитывающий зависимость кинематической погрешности рассчитываемой передачи от фактического максимального угла поворота ее выходного колеса. К = 0.07, т.к. угол поворота выходного вала по условию ±40 [1]. Координата середины поля рассеяния: Eij Поле рассеяния: i0 max j i0 min j 2 Vij i0 max j i0 min j - 16 Передаточный коэффициент j-й элементарной передачи: 1 1 j i j ,вых i j 1, j 2 iвых1,вых Минимальное значение мертвого хода: jn, min j л min j 7,32 , где mz2 j jn,min – минимальный боковой зазор между зубьями по общей нормали к профилям, выбирается по таблицам [1]. Максимальное значение мертвого хода: jt max 0,7( EHS1 EHS 2 ) 0,5(TH21 TH2 2 ) 2 f a2 p12 p22 , где EHS1, EHS2 – наименьшее смещение исходного контура шестерни и колеса TH1, TH2 – допуск на смещение исходного контура шестерни и колеса fa – допуск на отклонение межосевого расстояния передачи л max j 6,88 jt max j mz2 j p1, p2 – радиальные зазоры в опорах шестерни и колеса. p1 = p2 = 0 Координаты середины поля рассеяния мертвого хода Eлj: л max j л min j E лj 2 Поле рассеяния мертвого хода Vлj: Vлj л max j л min j Координата середины поля рассеяния суммарной погрешности: n Eip j Eij 0.39 j 1 Максимальная вероятностная кинематическая погрешность: n ip0 Eip0 t1 ( jVij ) 2 , где j 1 t1 – коэффициент, учитывающий процент риска По условию задан риск 1%, поэтому, исходя из [1], назначаем t1 = 0,48 p i0 0,47’ Координата середины поля рассеяния мертвого хода: n Eip j Ej 2,7 j 1 Значение мертвого хода: n л лp E лp t 2 ( jV л j ) 2 , где j 1 t2 – коэффициент, учитывающий процент риска - 17 По условию задан риск 1%, поэтому, исходя из [1], назначаем t2 = 0,39 n л лp E лp t 2 ( jV лj ) 2 5,82' j 1 Вычислим суммарную погрешность передачи: л лp ip0 6,29’<20’ Разрабатываемый ЭМП удовлетворяет требуемому условию точности. Исходные данные для расчёта: d, мм z EHS Fr, мкм TH i Ks K Fр, мкм Fi Fi0 min , мкм I1 6 20 5 11 20 I2 24 80 7 14 25 II1 6 20 5 11 20 4 0,8 0,96 16 23 II2 60 200 9 19 30 III1 6 20 5 11 20 10 0,99 0,98 19 26 16 23 III2 60 200 9 19 30 10 0,99 0,98 25 32 16 23 25 32 24,3 33,8 33,8 47 53,9 53,9 i 0 min j , угл. мин 6,97 3,88 3,88 i 0 max j , угл. мин 13,47 6,18 6,18 i 0 min j , угл. мин 0,49 0,27 0,27 i 0 max j , угл. мин 0,94 0,43 0,43 Eij, угл. мин Vij, угл. мин 0,72 0,45 0,01 0 0,35 0,16 0,1 0 0,35 0,16 1 0 0 0 0 fa jt max, мкм л max j , угл. мин 9 34,4 14 42,1 14 42,1 9,7 4,8 4,8 Eлj 4,8 2,4 2,4 Vлj л max j л min j 9,7 4,8 4,8 Fi0 max , мкм j jn,min, мкм л min j , угл. мин Находим максимальное значение кинематической погрешности элементарных передач в угловых минутах по формуле: Fi'0 i 0 6.88 m z Определяем передаточные коэффициенты элементарных передач по формуле: - 18 - j 1 i j в ij-в-передаточное отношение между выходными валами j-ой передачи и привода. Определим максимальную кинематическую погрешность передачи по формуле: i 0 n j i 0 j j 1 i 0 0,01*13,47+0,1*6,18+1*6,18=6,93’ Определим максимальные погрешности мёртвого хода элементарных передач по формуле: jt max 0.7 EHS 1 EHS 2 0.5 TH21 TH2 2 2 f a2 jt max 1 =34,4мкм jt max 2 =42,1мкм jt max 3 =42,1мкм Находим погрешность мёртвого хода л 6.88 jt m z л max 1 9,7’ л max 2 4,8’ л max 3 4,8’ Погрешность мёртвого хода кинематической цепи Л n j лj j 1 Л 0,01*9,7+0,1*4,8+1*4,8=5,4’ Вычислим суммарную погрешность передачи 6,93’+5.4’=12.33’ 0 S 12.33’ < 25’ Разрабатываемый ЭМП удовлетворяет требуемому условию точности. - 19 - Проверочные расчеты проектируемого привода – коэффициент перекрытия = 1,5 с – коэффициент нагрузки F 2,92 , где c F 0,174 F – окружная сила 2M . F mz 2 Найдем момент на колесе выходного вала: MC 1 =1.02 Нּмм M подш 0.98 Формула для нахождения момента на других колесах с учетом потерь на трение в зацеплении и в подшипниках: M k 1 Mk подшk , k 1ik , k 1 Найдем КПД всех элементарных передач. Расчет будем вести от выходной пары. Табл. 8.1. Расчет КПД элементарных передач Элементарная пара 12 23 34 Параметр i 4 10 10 М 10,75 0.10 1 F 0,005421 0.017 0.02 c 16,305 15,403 15,155 ηцi 0,873 0,88 0,882 Найдем общий КПД редуктора: ц цi 0,68 i 5 подш подш 0,90 Приведенный к валу двигателя уточненный статический момент: Mн 500 1 * М ст 02.58 ,0041 (Нּмм) < Mном пр ,68 00,90 ,90 i0 ц подш 400 244 00,88 По статическому моменту двигатель выбран правильно. Динамический момент: М д.пр. J пр , где ε – требуемое угловое ускорение вала двигателя н i0 , где - 20 εн – требуемое угловое ускорение нагрузки Jпр – приведенный к валу двигателя момент всего ЭМП, кгּм2 J J пр J р J рпр 2Н , где i0 Jр – момент инерции вращающихся частей двигателя, Jр = 0.0021·10-4 кг·м2, Jн – момент инерции нагрузки, Jн = 0.3 кг·м2 Jрпр – приведенный момент инерции ротора J J J рпр J 1 22 2n i12 i1n Момент инерции каждого звена: bpd 4 1012 , где Ji 32 d – диаметр звена b – толщина звена ρ – плотность, г/см3 ρ =7,85 г/см3 Табл. 8.2. Расчет момента инерции каждого звена Колесо 1 2 3 4 5 6 Параметр 6 24 6 60 6 60 d 1,35 1,2 1,35 1,2 1,35 1,2 b -8 0,13 30,68 0,13 1200 0,13 1200 Jּ10 J рпр 26 10 8 (кг м2 ) JН 4,24 10 6 (кг м2 ) 2 i0 6 0,017 м м) 244 10.25 М д.пр. J пр 4,19 10(Нּ 10 J пр J р J рпр М *ст.пр. М *д.пр. 0,021 (Нּмм) < 0,2(Нּмм) Проверка выполняется, т. е. по динамическому моменту двигатель выбран правильно. 8.2. Проверочные расчеты на прочность а) проверка прочности зубьев на изгибную прочность. Передача открытая σн ≤ [ σн ], σн = М 2 * К * К а3 *(i12 1)3 i122 * b * а 2 ≤ [ σн ], где i12 – передаточное отношение ступени M2 – момент на колесе [Н·мм]; - 21 К – коэффициент расчетной нагрузки; KFV – коэффициент динамической нагрузки KFB – коэффициент неравномерности распределения нагрузки по ширине зуба К=КFV*KFB=1.2*1.17=1.404 Kа – коэффициент, определяемый соотношением Ка=0,82* 3 2 * Е1 * Е2 =0,82* 3 Е2 =48, учитывая, что Е1 Е2 Модули упругости материалов шестерни и колеса Е1=Е2=2,1*105 МПа. σн =10,9 МПа σн= 39,9 МПа – для первой ступени σн = 606 МПа σн = 1690 МПа – для последней ступени [σн]= 1769,5 МПа σн ≤ [ σн ] <=> 606<1769,5 Проверка на изгибную прочность выполняется. - 22 б) проверка прочности зубьев при кратковременных перегрузках. Должно выполняться условие: σн мах=σн* Кпер ≤ [ σн ]мах Кпер – коэффициент перегрузки σн – контактное напряжение Кпер=Мпуск/М Кпер=0.032/0,2 = 0,16 [ σн ]мах= 2,8 * σт [ σн ]мах= 2,8 * 630 =1764 Мпа – для шестерен [ σн ]мах= 2,8 * 590 =1652 Мпа – для колес σн мах = 804*(0,16)^0.5 = 1187 МПа σн мах ≤ [ σн ]мах <=> 1187< 1764 МПа Проверка прочности зубьев выполняется. - 23 - Список литературы 1. Ю.А. Кокорев, В.А. Жаров, А.М. Торгов, Расчет электромеханического привода. М.: Издательство МГТУ им. Н.Э. Баумана, 1995, 132 с. 2. Элементы приборных устройств. Курсовое проектирование. Под ред. Тищенко О.Ф. Высш. Школа. 1982, ч.1, ч.2. 3. Е.В. Веселова, Н.И. Нарыкова, Расчет и конструирование валов и осей приборов. Учебное пособие по курсовому проектированию по курсу «Элементы приборных устройст». Под ред. Тищенко О.Ф. М.: Издательство МГТУ им. Н.Э. Баумана, 1980, 46 с. 4. Буцев А.А., Еремеев А.И., Кокорев Ю.А. и др. Атлас конструкций ЭМП. Под ред. Тищенко О.Ф. Машиностроение, 1982. 5. В.М. Пономарёв, Лекции по Основам Конструирования Приоборов. МГТУ им. Баумана, 2004.